Результат интеллектуальной деятельности: УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНО-КОСМИЧЕСКИХ ОБЪЕКТОВ В ДВУХДИАПАЗОННЫХ РАДИОЛОКАЦИОННЫХ КОМПЛЕКСАХ С АКТИВНЫМИ ФАЗИРОВАННЫМИ АНТЕННЫМИ РЕШЕТКАМИ (АФАР)
Вид РИД
Изобретение
Изобретение относится к радиолокации и может быть использовано для распознавания классов воздушно-космических объектов (ВКО) в двухдиапазонных радиолокационных комплексах с двумерным электронным сканированием.
В предлагаемом устройстве используются современные радиолокационные технологии адаптивного взаимодействия радиолокационных станций (РЛС) разного диапазона длин волн, которые позволяют при двухэтапном распознавании в двухдиапазонных комплексах значительно уменьшить временные затраты на решение задачи распознавания. Комплексирование в единый радиолокационный комплекс РЛС разного диапазона длин волн и адаптивное взаимодействие РЛС позволяет также улучшить целый ряд основных параметров комплекса (расширить алфавит классов целей, увеличить вероятность и достоверность распознавания, снизить вероятность перепутывания классов целей) и, тем самым, обеспечить более эффективное решение возлагаемых на РЛС задач.
Известны устройства, в которых предлагается вариант решения аналогичной задачи [1, 2]. Недостатком аналога [1], применяемого в РЛС с многочастотным зондирующим сигналом (ЗС), является низкая вероятность правильного распознавания воздушных объектов, малое количество распознаваемых классов, длительное время, затрачиваемое на распознавание. В аналоге [2], где используется распознавание ВКО в «просветной» РЛС наземно-космического базирования, недостатком также является сравнительно небольшое количество распознаваемых классов ВКО (ракета, вертолет, истребитель, транспортный самолет, баллистическая ракета, части баллистической ракеты). Также большое время затрачивается на распознавание классов.
Наиболее близким по своей технической сущности и техническому исполнению является устройство [3], используемое для распознавания ВКО в РЛС с поимпульсной перестройкой частоты зондирования и принятое за прототип. Это устройство содержит блок обработки радиолокационной информации, вычислитель вертикальной составляющей скорости, вычислитель трассовой скорости, классификатор первого уровня, классификатор второго уровня, вычислитель частотного признака распознавания и блок усреднения частотного признака, вычислитель эффективной площади рассеяния и блок усреднения эффективной площади рассеяния, а также параметрический классификатор.
Недостатком прототипа является необходимость усреднения используемого в нем частотного признака распознавания по большому количеству измерений для получения высоких вероятностей правильного распознавания. Следствием этого являются малые рубежи распознавания класса воздушного объекта при применении данного устройства в РЛС, реализующих регулярный обзор пространства по азимуту, из-за большого количества межобзорных измерений при малом количестве используемых рабочих частот либо из-за малого отношения сигнал-шум на каждой рабочей частоте при их большом количестве. Реализация прототипа в РЛС с активной фазированной антенной решеткой (АФАР) и двумерным сканированием, способной удерживать луч в направлении на цель в течение длительного времени для накопления сигнала, значительно снижает ее производительность.
Техническим результатом заявляемого изобретения является улучшение тактико-технических характеристик (ТТХ), заключающееся в значительном уменьшении времени распознавания, увеличении рубежей выдачи информации о распознанном классе цели, обеспечивающие в дальнейшем увеличение алфавита распознаваемых классов ВКО (особенно скоростных) при достаточно высоком уровне вероятности и достоверности правильного распознавания классов цели. Поставленная цель достигается использованием адаптации частот зондирующего сигнала для распознавания по признаку продольного размера цели. Оценка продольного размера осуществляется в два этапа с предварительным измерением частотного признака для адаптивного выбора частот зондирования и последующим точным измерением продольного размера при квазиоптимальном разносе зондирующих частот. При этом оценка частотного признака на первом этапе осуществляется при регулярном обзоре пространства по азимуту длинноволновой РЛС с использованием двух частот зондирования и не требует большого количества измерений для усреднения из-за сравнительно низких требований к точности оценки. Точное же измерение продольного размера цели осуществляется коротковолновой РЛС с АФАР и двумерным сканированием при длительном контакте с целью.
Для оценки продольного размера может быть использован способ, разработанный профессором Я.Д. Ширманом, заключающийся в облучении цели многочастотным сигналом с последующим анализом полученного частотного портрета цели. Частотный портрет представляет собой зависимость эффективной площади рассеивания (ЭПР) цели от частоты зондирующего сигнала [4]. Для определения продольного размера воздушного объекта (ВО) при некогерентном многочастотном зондировании с поимпульсной перестройкой частоты РЛС обычно применяется метод измерения интервала корреляции по частоте.
Продольный размер воздушного объекта, используется в предлагаемом устройстве в качестве сигнального признака для увеличения вероятности правильного распознавания некоторых классов обнаруженных целей, таких как самолеты тактической и стратегической авиации и ложные цели. Так как процесс вычисления продольного размера является ресурсозатратным, он реализуется только для целей, не распознающихся по другим признакам.
Заявляемый результат достигается за счет того, что в устройство, содержащее блок обработки радиолокационной информации (БО), вычислитель вертикальной составляющей скорости (ВСС), вычислитель трассовой скорости (ВТС), классификатор первого уровня (КПУ), классификатор второго уровня (КВУ), вычислитель частотного признака распознавания (ВЧПР), блок усреднения частотного признака (БУЧПР), вычислитель эффективной площади рассеяния (ВЭПР), блок усреднения эффективной площади рассеяния (БУЭПР), а также параметрический классификатор (ПК), дополнительно введены устройство выбора воздушных объектов (УВВО), устройство выбора рабочих частот (УВРЧ) и вычислитель продольного размера (ВПР). Кроме того, БО выполнен с дополнительной возможностью обобщенной (от двух модулей) вторичной обработки радиолокационной информации и расчета приоритета трассы на основе данных о результатах государственного опознавания воздушного объекта, его дальности и скорости полета.
На фигуре представлена структурная схема предлагаемого устройства со следующими обозначениями:
1 - блок обработки радиолокационной информации (БО);
2 - вычислитель вертикальной составляющей скорости (ВСС);
3 - вычислитель трассовой скорости (ВТС);
4 - вычислитель частотного признака распознавания (ВЧПР);
5 - вычислитель ЭПР (ВЭПР);
6 - классификатор первого уровня (КПУ);
7 - классификатор второго уровня (КВУ);
8 - блок усреднения частотного признака распознавания (БУЧПР);
9 - блок усреднения ЭПР (БУЭПР);
10 - устройство выбора воздушных объектов (УВВО);
11 - устройство выбора рабочих частот (УВРЧ);
12 - вычислитель продольного размера (ВПР);
13 - параметрический классификатор (ПК).
Предлагаемое устройство состоит из блока обработки радиолокационной информации БО 1, вычислителя вертикальной составляющей скорости ВСС 2, вычислителя трассовой скорости ВТС 3, вычислителя частотного признака распознавания ВЧПР 4 с блоком его усреднения БУЧПР 8, вычислителя ЭПР ВЭПР 5 с блоком его усреднения БУЭПР 9, классификаторов первого и второго уровней КПУ 6 и КВУ 7, соответственно, устройства выбора воздушных объектов УВВО 10, устройства выбора рабочих частот УВРЧ 11, вычислителя продольного размера ВПР 12 и параметрического классификатора ПК 13. Первый, второй и третий выходы БО 1 соединены, соответственно, с первым входом, через ВСС 2 со вторым входом и через ВТС 3 с третьим входом КПУ 6, второй выход ВСС 2 соединен с первым входом ВТС 3, а выход КПУ 6 - с входом КВУ 7, первый и второй выходы КВУ 7 соединены, соответственно, с первым входом ПК 13 и с первым входом УВВО 10, второй вход УВВО 10 соединен с четвертым выходом БО 1, а третий вход - с выходом УВРЧ 11, первый вход которого соединен со вторым выходом УВВО 10, первый выход которого является первым выходом устройства, а второй вход - через последовательно соединенные ВЧПР 4 и БУЧПР 8 с пятым выходом БО 1, шестой выход БО 1 через ВПР 12 соединен со вторым, а седьмой выход БО 1 через последовательно соединенные ВЭПР 5 и БУЭПР 9 с третьим входами ПК 13, выход которого является вторым выходом устройства.
Предлагаемое устройство работает в двухдиапазонном радиолокационном комплексе с АФАР, двумерным электронным сканированием и с многочастотным зондированием цели при поимпульсной перестройке частоты.
На вход БО 1 поступает информация об обнаруженных модулями РЛС метрового и дециметрового (сантиметрового) диапазона длин волн эхосигналах ВКО, содержащая дальность, азимут, угол места и амплитуду эхосигналов на каждой частоте зондирования, а также информация о госпринадлежности ВКО. БО 1 осуществляет пересчет координат в прямоугольную систему, завязку трассы по ВКО, привязку обнаруженных эхосигналов к существующим трассам, измеряет скорость ВКО по обобщенным от двух модулей координатам х и y (Vx, Vy) и его высоту, а также осуществляет расчет приоритета трассы. Полученные от приемников радиолокационных модулей амплитуды эхосигналов на каждой частоте зондирования БО 1 ретранслирует на вычислитель частотного признака распознавания ВЧПР 4, на вычислитель ЭПР воздушного объекта ВЭПР 5 и на вычислитель продольного размера ВПР 12.
Данные о высоте ВКО, рассчитанные по измеренному дециметровым (сантиметровым) модулем углу места, с первого выхода БО 1 поступают на первый вход классификатора первого уровня КПУ 6, а со второго выхода БО 1 - на вход вычислителя ВСС 2.
Вычислитель ВСС 2 по формуле  определяет значение вертикальной составляющей скорости VHi, которое подается на второй вход КПУ 6 и на первый вход ВТС 3, на второй вход которого с третьего выхода БО 1 поступают значения горизонтальных составляющих скоростей Vx и Vy. В ВТС 3 вычисляется значение трассовой скорости ВКО по формуле
определяет значение вертикальной составляющей скорости VHi, которое подается на второй вход КПУ 6 и на первый вход ВТС 3, на второй вход которого с третьего выхода БО 1 поступают значения горизонтальных составляющих скоростей Vx и Vy. В ВТС 3 вычисляется значение трассовой скорости ВКО по формуле  , которое подается на третий вход КПУ 6, в котором осуществляется сопоставление информации о высоте ВКО, его вертикальной составляющей скорости и трассовой скорости с априорно заданной информацией о возможных значениях этих признаков для каждого класса цели. Априорная информация закладывается в КПУ 6 в виде координат точек плоскостей «трассовая скорость - высота», и «вертикальная составляющая скорости - высота», ограничивающих области возможных значений этих признаков для каждого класса ВКО. КПУ 6 оценивает попадание точки плоскостей «трассовая скорость - высота», и «вертикальная составляющая скорости - высота» с текущими вертикальной составляющей скорости, трассовой скоростью и высотой полета ВКО в области возможных значений соответствующих плоскостей для каждого из распознаваемых классов ВКО.
, которое подается на третий вход КПУ 6, в котором осуществляется сопоставление информации о высоте ВКО, его вертикальной составляющей скорости и трассовой скорости с априорно заданной информацией о возможных значениях этих признаков для каждого класса цели. Априорная информация закладывается в КПУ 6 в виде координат точек плоскостей «трассовая скорость - высота», и «вертикальная составляющая скорости - высота», ограничивающих области возможных значений этих признаков для каждого класса ВКО. КПУ 6 оценивает попадание точки плоскостей «трассовая скорость - высота», и «вертикальная составляющая скорости - высота» с текущими вертикальной составляющей скорости, трассовой скоростью и высотой полета ВКО в области возможных значений соответствующих плоскостей для каждого из распознаваемых классов ВКО.
Таким образом, классификатор первого уровня осуществляет предварительное распознавание класса ВКО по траекторным признакам.
Результаты, полученные в КПУ 6, поступают на классификатор второго уровня КВУ 7, где применяется корректор по большинству, использующий алгоритм обобщенного голосования [4, стр. 26]. На данном этапе принимается окончательное решение о принадлежности ВКО определенному классу, если его можно распознать по траекторным признакам, или о принадлежности ВКО группе классов, распознавание внутри которой будет осуществляться по сигнальным признакам: продольному размеру и усредненной ЭПР.
ЭПР ВКО оценивается на основе поступающих с выхода 7 БО 1 данных о дальности и угле места цели, амплитуде ее эхосигнала и априорной зависимости дальности цели с ЭПР 1 м2 от угла места [5].
Продольный размер вычисляется на основе анализа поступающих с выхода 5 БО 1 амплитуд эхосигналов целей на каждой частоте, получаемых при многочастотном зондировании.
Как известно, одним из наиболее распространенных и простых в реализации способов радиолокационного определения продольного размера воздушного объекта является метод, при котором РЛС излучает многочастотный сигнал [4], перестраивая частоту зондирования сигнала от импульса к импульсу по заранее заданному периодическому закону. Расстояние между частотами при этом определяет наибольший однозначно измеряемый продольный размер воздушного объекта и рассчитывается в
соответствии с теоремой Котельникова по формуле  , где Lmax - наибольший, однозначно измеряемый продольный размер воздушного объекта, с - скорость распространения электромагнитных волн.
, где Lmax - наибольший, однозначно измеряемый продольный размер воздушного объекта, с - скорость распространения электромагнитных волн.
Требуемый для измерения наименьший продольный размер воздушного объекта определяет диапазон частотной перестройки РЛС при излучении многочастотного зондирующего сигнала  , где Lmin - наименьший, однозначно измеряемый продольный размер воздушного объекта.
, где Lmin - наименьший, однозначно измеряемый продольный размер воздушного объекта.
Необходимое для измерения продольного размера количество излучаемых частот определяется формулой  .
.
Таким образом, для однозначного радиолокационного измерения целей в наиболее распространенном диапазоне продольных размеров от 4 м (соответствует авиационным ракетам) до 50 м (соответствует крупноразмерным самолетам) необходимо излучение и прием сигнала на 26 частотах. Причем, как показало моделирование, для необходимой точности измерения в среднем на каждой частоте отношение сигнал-шум должно составлять не менее 18 дБ, что при регулярном круговом способе обзора пространства по азимуту достигается лишь на малых рубежах.
Необходимо отметить, что в РЛС с АФАР и двумерным электронным сканированием возможно измерение продольного размера воздушного объекта при многочастотном зондировании в режиме остановленного на цели луча. При этом значительно увеличиваются рубежи распознавания, однако требуется длительный контакт с целью для накопления эхосигнала на каждой частоте, что накладывает ограничения на количество распознаваемых за время обзора воздушных объектов. Кроме того, возникает проблема распределения ограниченных временных ресурсов РЛС между задачами обнаружения и сопровождения воздушных объектов в режиме регулярного обзора и их распознавания в режиме остановленного на цели луча.
Временные затраты на измерение продольного размера цели могут быть значительно уменьшены при реализации измерения в два этапа в радиолокационных комплексах (РЛК) с двухмодульным построением. Причем наибольших рубежей выдачи информации о классе цели и вероятностей правильного распознавания удается добиться в двухдиапазонных РЛК метрово-дециметровых или метрово-сантиметровых длин волн. В таких радиолокационных комплексах обнаружение и сопровождение воздушных объектов осуществляется радиолокационным модулем метрового диапазона длин волн. Большие значения ЭПР в этом диапазоне обеспечивают большие дальности обнаружения целей особенно малозаметных. При реализации зондирования в этом модуле на двух частотах с поимпульсной перестройкой частоты осуществляется грубая оценка продольного размера посредством вычисления и усреднения частотного признака распознавания: малоразмерный воздушный объект - продольный размер от 4 до 12 м, среднеразмерный воздушный объект - продольный размер от 12 до 25 м или крупноразмерный воздушный объект - продольный размер от 26 до 50 м. Эти операции реализуются в ВЧПР 4 и БУЧПР 8, соответственно.
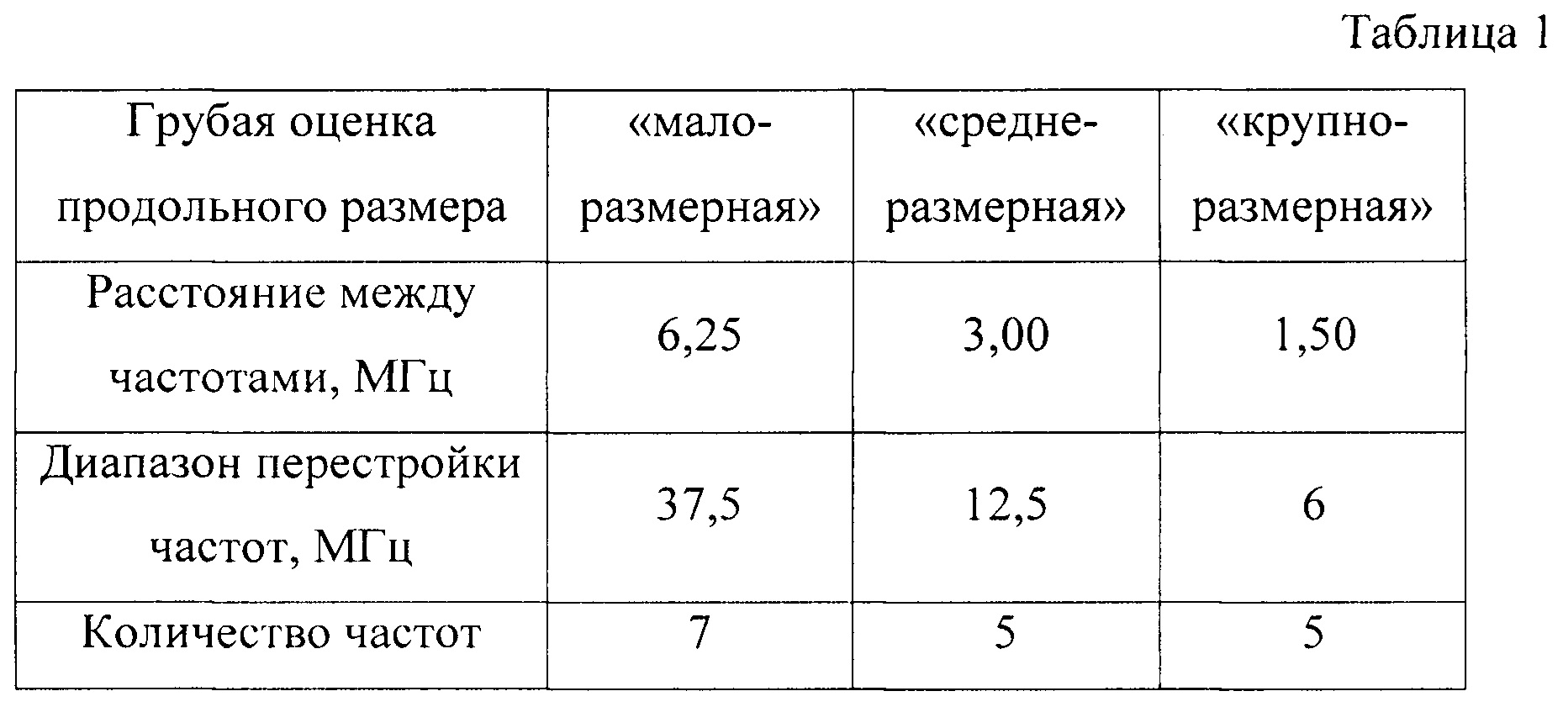
Грубая оценка продольного размера позволяет выбрать оптимальный диапазон рабочих частот и шаг по частоте для точного измерения продольного размера в РЛС коротковолнового диапазона длин волн с АФАР и двумерным электронным сканированием, осуществляющей длительный контакт с целью в режиме остановленного на воздушном объекте луча. Так, для малоразмерной цели выбирается большой диапазон перестройки по частоте с крупным шагом изменения частоты, а для крупноразмерной цели, наоборот, - небольшой диапазон перестройки по частоте с мелким шагом по частоте. В обоих случаях количество частот, используемых для точного измерения продольного размера, и, соответственно, затрачиваемое на это время будут существенно уменьшены. Возникающая экономия временных ресурсов позволяет распознавать большее количество воздушно-космических объектов в течение одного обзора, либо позволяет использовать сэкономленное время для реализации других специальных режимов, улучшающих качество радиолокационной информации. При этом за счет точного измерения продольного размера на одном обзоре обеспечиваются большие рубежи распознавания классов ВКО.
Значения расстояния между частотами, диапазона частот и их количества для точного измерения продольного размера малоразмерного, среднеразмерного и крупноразмерного воздушного объекта приведены в таблице 1.
Выбор рабочих частот для точного измерения продольного размера осуществляется в УВРЧ 11 на основе грубой оценки продольного размера, поступающей из БУЧПР 8, и по команде от УВВО 10. Выбранный набор частот зондирования поступает в УВВО 10, с первого выхода которого на РЛС коротковолнового диапазона длин волн поступают координаты цели, на которой необходимо остановить луч для точного измерения продольного размера посредством зондирования на выбранных рабочих частотах.
Выбор коротковолновой (дециметрового или сантиметрового диапазона длин волн) РЛС для точного измерения продольного размера обусловлен возможностью формирования в ней узких диаграмм направленности антенны, как в азимутальной, так и в угломестной плоскостях, что позволяет минимизировать время контакта с воздушным объектом при фиксированном среднем отношении сигнал-шум. Кроме того, РЛС дециметрового и сантиметрового диапазонов длин волн обеспечивают большие точности измерения траекторных признаков распознавания по сравнению с РЛС метрового диапазона.
Выбор целей для точного измерения продольного размера осуществляется в УВВО 10, на основе информации о распознанных классах и группах классов, поступающей с КВУ 7, а также на основе значения приоритета ВКО, поступающего с четвертого выхода БО 1. Такой подход позволяет измерять продольный размер лишь воздушных объектов, нераспознающихся по другим признакам, а также наиболее приоритетных целей, в случае недостатка производительности РЛС.
Амплитуды эхосигналов ВКО, полученные при зондировании на оптимизированных частотах РЛС дециметрового или сантиметрового диапазона длин волн поступают в БО 1 и транслируются с его шестого выхода на устройство вычисления продольного размера ВПР 12.
Вычисленный продольный размер поступает на второй вход параметрического классификатора ПК 13. На его первый вход поступают результаты обобщенного голосования с блока КВУ 7, на третий вход -данные об усредненной ЭПР ВКО с блока БУЭПР 9. Здесь принимается окончательное решение о классе ВКО с учетом сигнальных признаков.
Параметры КПУ 6, КВУ 7 и ПК 13 выбираются в соответствии с априорными распределениями признаков распознавания классов ВКО, а также исходя из ошибок измерения признаков и требований к вероятности правильного распознавания классов ВКО.
Таким образом, введенные в прототип УВВО, УВРЧ, ВПР с новыми связями и выполнение БО с дополнительными возможностями, позволили улучшить ТТХ прототипа и получить указанные выше технические результаты.
Список литературы
1. Патент РФ №2083993 «Радиолокационное устройство распознавания воздушных целей», 10.07.1997 (аналог).
2. Патент РФ№2324201 «Устройство радиолокационного распознавания воздушных объектов», 27.12.2007 (аналог).
3. Патент РФ2570111 «Устройство радиолокационного распознавания воздушно-космических объектов», 06.11.2015 (прототип).
4. Ширман А.Д. и др. «Методы радиолокационного распознавания и их моделирование». Зарубежная радиоэлектроника, 1996, №11.
5. Сколник М. Справочник по радиолокации, том 1. М.: «Советское радио», 1976, стр. 356-395.
Устройство распознавания воздушно-космических объектов (ВКО) в двухдиапазонных радиолокационных комплексах с АФАР, содержащее блок обработки радиолокационной информации (БО), на вход которого поступает информация об обнаруженных двумя модулями радиолокационных станций (РЛС) метрового и дециметрового/сантиметрового диапазонов длин волн эхо-сигналов воздушно-космических объектов (ВКО), содержащее дальность, азимут, угол места и амплитуду сигналов на каждой частоте зондирования, а также информацию о принадлежности ВКО, при этом БО осуществляет пересчет координат в прямоугольную систему, завязку трасс по ВКО, привязку обнаруженных эхо-сигналов к существующим трассам, содержащее также вычислитель вертикальной составляющей скорости (ВСС), вычислитель трассовой скорости (ВТС), вычислитель частотного признака распознавания (ВЧПР), вычислитель эффективной площади рассеяния (ВЭПР), классификатор первого уровня (КПУ), классификатор второго уровня (КВУ), блок усреднения частотного признака распознавания (БУЧПР), блок усреднения эффективной площади рассеяния (БУЭПР) и параметрический классификатор (ПК), причем выходы 1, 2, 3, 5 и 7 БО соединены, соответственно, с первым входом КПУ, входом ВСС, вторым входом ВТС, входом ВЧПР и входом ВЭПР, первый выход ВСС соединен со вторым входом КПУ, а второй - с первым входом ВТС, выход которого соединен с третьим входом КПУ, а выход КПУ - с входом КВУ, первый выход которого соединен с первым входом ПК, выходы ВЧПР и ВЭПР соединены, соответственно, с входами БУЧПР и БУЭПР, выход которого соединен с третьим входом ПК, выход которого является вторым выходом устройства, отличающееся тем, что дополнительно введено устройство выбора воздушных объектов (УВВО), устройство выбора рабочих частот (УВРЧ) и вычислитель продольного размера (ВПР), а БО выполнен с дополнительной возможностью на основании полученной информации определить скорость ВКО по обобщенным от двух модулей РЛС координатам х и у (Vx, Vy) и его высоту, а также рассчитать приоритет трассы, при этом первый, второй и третий входы УВВО соединены, соответственно, со вторым выходом КВУ, четвертым выходом БО и выходом УВРЧ, первый выход УВВО является первым выходом устройства, а второй выход соединен с первым входом УВРЧ, второй вход которого соединен с выходом БУЧПР, вход ВПР соединен с шестым выходом БО, а выход - со вторым входом ПК.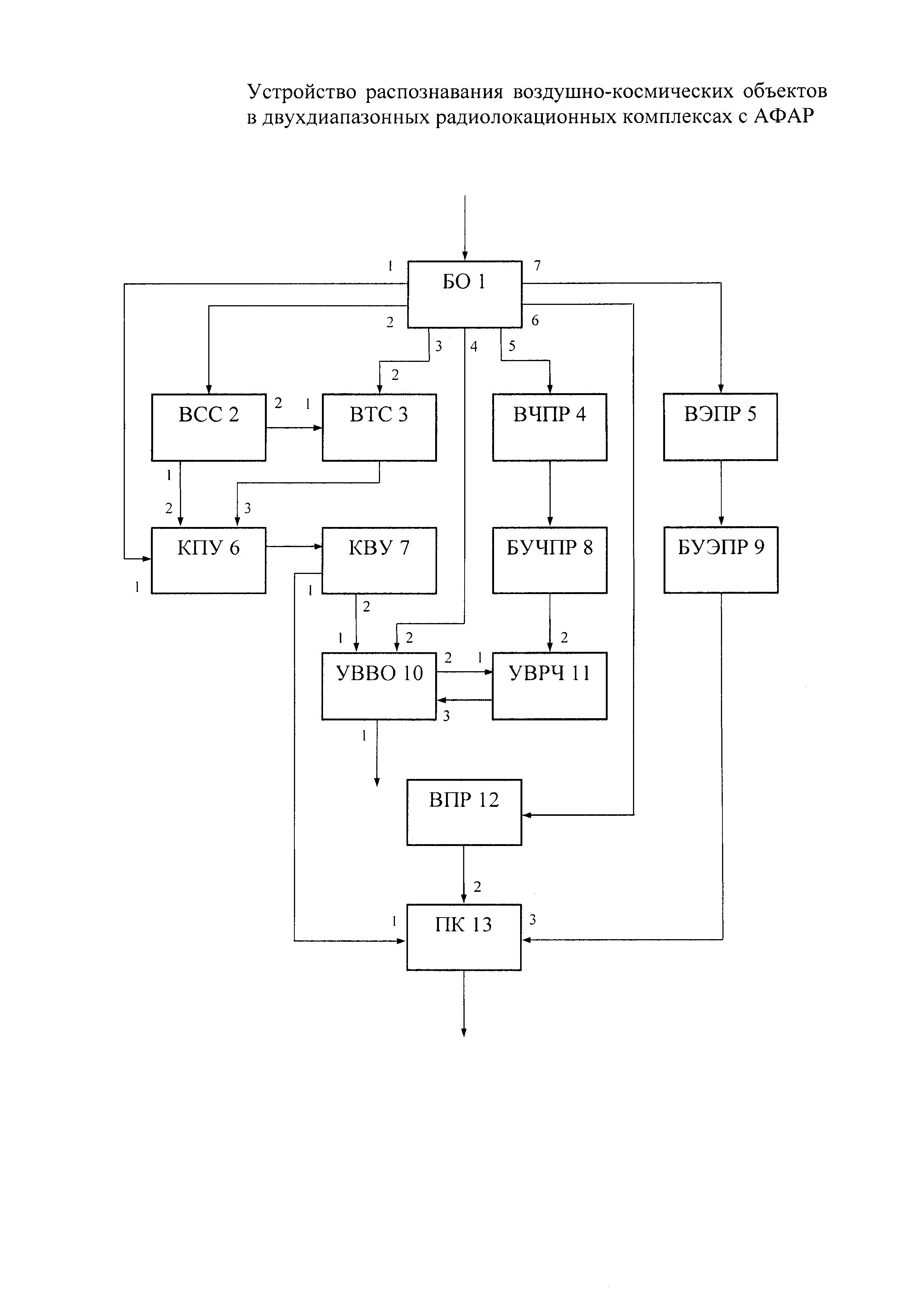
Способ и устройство дистанционного обнаружения и распознавания объектов с нелинейными маркерами
Способ селекции движущихся целей
Способ измерения угловых координат в нелинейном радиолокаторе
Способ измерения дальности цели в ближней радиолокации
Способ построения микрополосковых направленных ответвителей
Пассивная система охлаждения радиоэлементов электронных блоков
Устройство обработки сигналов в наземно-космической просветной радиолокационной системе
Способ радиолокационного обзора пространства
Способ распознавания баллистических целей и определения координат точек их пуска и падения для обзорных радиолокационных станций
Способ и устройство обнаружения объектов поиска, содержащих металлические контакты, в нелинейных радиолокаторах ближнего действия
Способ и устройство нелинейной радиолокации
Способ радиолокационного определения времени окончания активного участка баллистической траектории
Межобзорное устройство картографирования пассивных помех при использовании лчм сигналов
Способ определения модуля скорости баллистической цели в наземной радиолокационной станции
Способ определения модуля скорости аэродинамической цели
Способ и устройство обзора пространства в рлс
Устройство радиолокационного распознавания воздушно-космических объектов
Способ и устройство сопровождения целей на больших дальностях
Мобильная трехкоординатная радиолокационная станция
Способ радиолокационного обзора пространства

