Результат интеллектуальной деятельности: СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к области гидрографии, в частности к способу и устройству съемки рельефа дна акватории, и может быть использовано для изучения поля рельефа дна в Мировом океане в целях навигационно-гидрографического обеспечения флота и народного хозяйства.
Известен способ съемки рельефа дна акватории (Баландин Л.А. и др. Средства и методы топографической съемки шельфа. М.: Недра. - с. 92.97 [1]), включающий вождение съемочного судна, на котором установлен эхолот, по запланированным галсам, излучение гидроакустических сигналов в сторону дна, прием отраженных от дна этих сигналов, измерение расстояний гидроакустическим путем от приемоизлучающей антенны эхолота до мест отражений этих сигналов эхолотом, определение координат приемоизлучающей антенны эхолота, измерение параметров бортовой и вертикальной качек, истинного курса, скорости судна, определение по полученным данным истинных значений глубин и их геодезических координат с последующей их регистрацией.
Известен [1] также эхолот для осуществления данного способа, содержащий приемоизлучающую антенну, расположенную на заданном горизонте в днище судна, передающий и приемоизмерительный блоки, блок управления, блок определения искомых значений глубин акватории и их геодезических координат и регистратор, при этом выход передающего и вход приемоизмерительного блоков соединены через блок управления с входами приемоизлучающей антенны, а также выходы приемоизмерительного блока навигационного комплекса судна через блок управления подключены к входу блока определения искомых глубин акватории и их геодезических координат, выход, которого соединен с входом регистратора.
Недостатки известного способа съемки рельефа дна акватории и эхолота для его осуществления ([1]) заключаются в сложности осуществления способа и низкой точности эхолота при использовании их в условиях бортовой и вертикальной качки судна, проседанием судна на мелководье, а также колебанием уровня на акватории, обусловленным приливоотливными явлениями и за счет пространственной и временной изменчивости скорости и временной изменчивости скорости распространения звука в воде на акватории (Коломийчук Н.Д. Гидрография. ГУНиО МО. 1988. - с. 257 [2]).
Кроме того, сложность использования известного способа и эхолота обусловлена необходимостью выполнения измерений и вычислений, связанных с определением поправок за отклонение действительной средней скорости звука в воде от используемой в вычислениях расчетных значений средней скорости звука в воде для акустического канала эхолота.
Действительную скорость звука в воде определяют на акватории косвенным путем по измеренным значениям температуры, солености и плотности морской воды на принятых в практике стандартных горизонтах по глубине или путем непосредственного измерения скорости звука в равномерно распределенных местах по всей площади акватории.
Ввиду того что требуемая достоверность определения средней скорости звука в воде расчетным путем достигается только в локальной пространственной области, в которой измеряется температура, соленость и плотность морской воды, то точность съемки рельефа дна акватории в конечном итоге отягощается систематической погрешностью, обусловленной влиянием мелкомасштабной и крупномасштабной изменчивости во время ветрового перемещения и турбулентности, внутренних волн, подводных течений.
Эта погрешность может достигать 3% от измеряемой глубины [2].
При использовании известного способа и эхолота имеют место систематические погрешности, вызванные изменением осадки судна за расход воды и топлива и за проседание судна на мелководье на акватории, которая может достигать 0,29 м [2].
Допустимая погрешность определения глубин до 10 м определяется величиной 0,1 м [2].
При использовании данных способа и эхолота для исключения случайных погрешностей определения глубины, обусловленной бортовой качкой, используют гировертикаль, а для исключения случайных погрешностей определения глубин за вертикальное перемещение судна, обусловленные волнением, проседанием судна на мелководье при его движении, используют акселерометры с вертикальной осью чувствительности [2].
Для исключения систематической погрешности определения глубины акватории, обусловленной наличием на акватории приливов и отливов воды, используют информацию временных или постоянных уровенных постов наблюдения за колебанием уровня на акватории [2].
При использовании известных способа и эхолота применение дополнительных технических средств обуславливает сложность, трудоемкость и неавтономность процесса определения глубин с требуемой точностью.
Задачей предлагаемого технического решения является расширение функциональных возможностей известного способа съемки рельефа дна акватории и эхолота для его осуществления путем обеспечения автоматического исключения случайных и систематических погрешностей при измерении глубин и определении их геодезических координат с требуемой точностью в процессе съемки рельефа дна акватории.
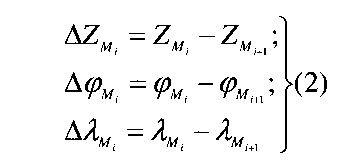
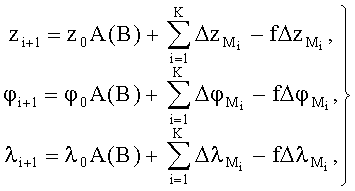
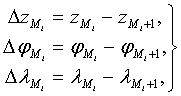
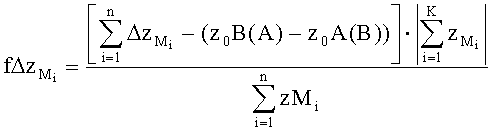
Поставленная задача достигается тем, что в способе съемки рельефа дна акватории, включающем вождение судна, на котором установлен эхолот, по запланированным галсам, излучение гидроакустических сигналов в сторону судна, прием отраженных от поверхности дна этих сигналов эхолотом, определение геодезических координат приемоизлучающей антенны эхолота, измерение параметров бортовой и вертикальной качек, истинного курса, скорость движения судна, определение по полученным данным истинных значений глубин и их геодезических координат с последующей их регистрацией, в отличие от прототипа в начале каждого галса и в конце проходят судном место расположения опорного гидрографического пункта с известными глубиной и его геодезическими координатами, измеренные в моменты прохода над пунктом глубина Zизмi и ее геодезические координаты фиксируются, вычисляют приращения ΔZπi, Δφпi, Δλпi смежных глубин Zизмi и zизмi+1 смежных гидрографических координат φi, φi+1 и λi, λi+1 соответственно, а истинные значения глубин Ζi+1 и их геодезические координаты φi+1, λi+1 в пунктах, расположенных вдоль галса, определяют по формулам:
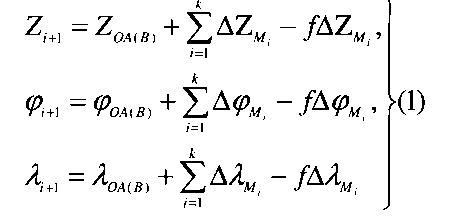
где i=1, 2, …, n - порядковый номер расчетных значений выбранных глубин Ζi+1 и их географических координат φi+1, λi+1 в пунктах, расположенных на съемочном галсе;
ZОА(B), φOA(Β), λOA(B) - эталонные геодезические координаты и эталонные глубины опорных пунктов А и В, измеренные эталонными техническими средствами соответственно;
k, n - число выбранных расчетных значений Ζi+1 и их геодезических координат φi+1, λi+1 на отрезке съемочного галса, ограниченного опорными пунктами А или В и массивом измерений Ε и опорными пунктами А и В соответственно;
 ,
,  ,
,  - приращения смежных географических координат
- приращения смежных географических координат  ,
,  ,
,  ,
,  и смежных глубин
и смежных глубин  и
и  соответственно, определяют по формулам:
соответственно, определяют по формулам:
 ,
,  ,
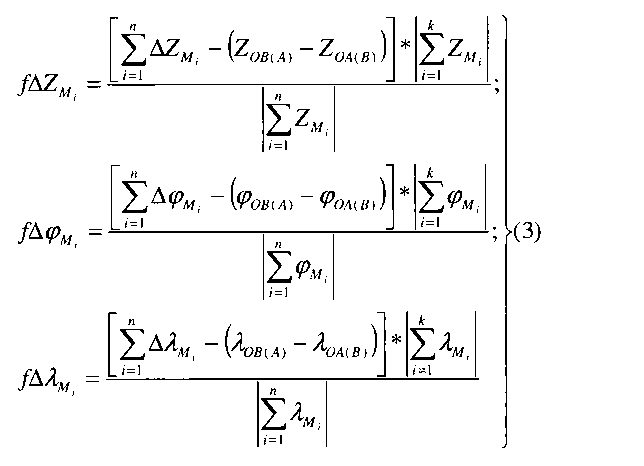
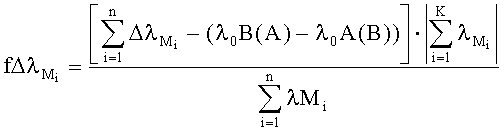
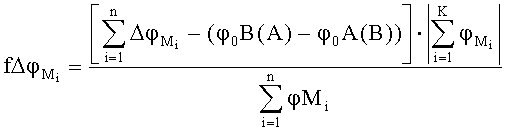
,  - поправки к искомым
,
,
- поправки к искомым
,
,  соответственно определяют по формулам:
соответственно определяют по формулам:
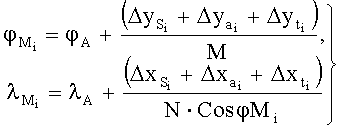
где географические координаты места отражения гидроакустического сигнала от поверхности дна it отсчета определяют по следующим формулам:
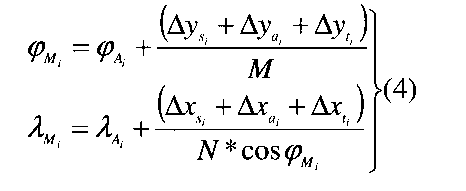
где  ,
,  - значения координат антенны бортового навигационного комплекса;
- значения координат антенны бортового навигационного комплекса;
Μ, N - радиусы кривизны эллипсоида в меридиональном и нормальном сечениях соответственно;
 ,
,  - поправки к координатам, обусловленные наличием бортовой и килевой
- поправки к координатам, обусловленные наличием бортовой и килевой
качек судна при его движении в направлении истинного курса ИKi, вычисляют по формулам:

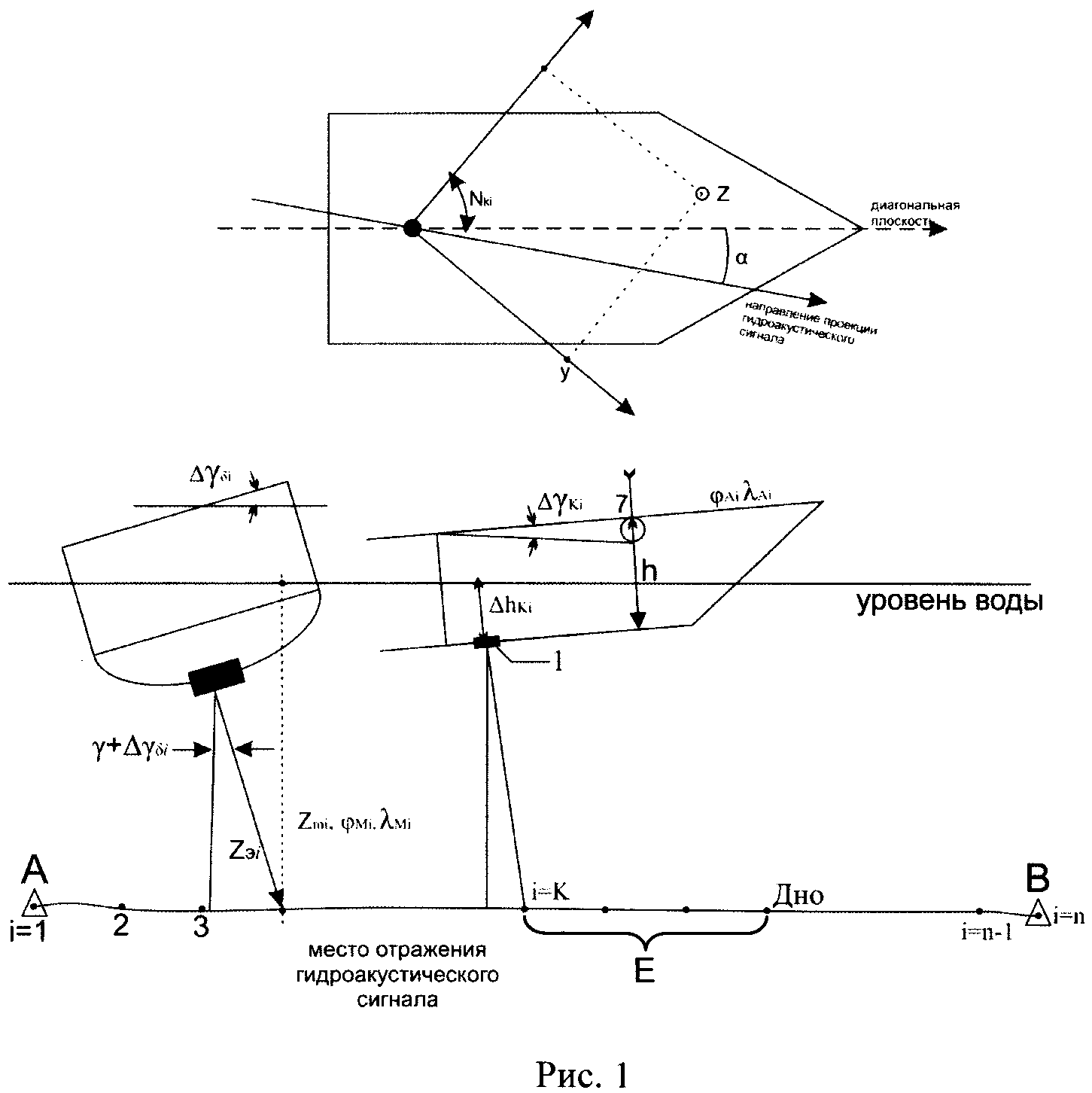
где Zэi - расстояние до дна, измеренное эхолотом;
α - угол между продольной осью судна и проекцией гидроакустического луча эхолота на горизонтальную плоскость;
γ - угол между диагональной плоскостью судна и проекцией направления луча на вертикальную плоскость;
при этом углы α и γ определяются местом и точностью установки приемоизлучающей антенны эхолота на судне и остаются неизменными до следующей остановки антенны эхолота, их значения определяются заранее и вносятся в программную память навигационного комплекса, при этом навигационным комплексом также определяют скорость, курс, координаты, углы бортовой и килевой качки судна (Δγδi, Δγki), поправки к координатам xi, yi, за отличие координат антенны спутниковой навигационной системы навигационного комплекса от места расположения приемоизлучающей антенны эхолота соответственно (Δxαi, Δyαi, определяют по формулам:

где x, y, h - относительные координаты между приемоизлучающей антенной эхолота и антенной навигационного комплекса, причем эти координаты остаются постоянными;
Δxti, Δyti - поправки к координатам xi, yi за отличие времени измерения параметров эхолотом tZMi и бортовым навигационным комплексом tKi:
где Δti=(tZMi-tKi) - разность времени измерения эхолотом и бортовым навигационным комплексом;
υi - скорость движения судна в i-м отсчете, определенная навигационным комплексом;
глубину места отражения гидроакустического сигнала ZMi для i-го результата измерений ZЭi с учетом бортовой, килевой и вертикальной качки судна, а также разновременностью измерений параметров качки и расстояния до дна определяют по формуле:

где Δti - поправка к глубине места отражения гидроакустического сигнала, обусловленная разновременностью измерений эхолота и бортового навигационного комплекса.
Поставленная цель достигается также тем, что эхолот для осуществления заявленного способа содержит приемоизлучающую систему, передающий блок, приемоизмерительный блок, блок управления, блок определения истинных значений глубин и их геодезических координат на акватории и регистратор, при этом выход передающего и вход приемоизмерительного блоков соединены соответственно через блок управления с входом и выходом приемоизлучающей антенны, а также выходы приемоизмерительного блока и навигационного комплекса судна через блок управления соединены к входу введенного блока определения истинных глубин акватории и их геодезических координат, свободных от случайных математических погрешностей, выход которого соединен с входом регистратора.
Пример осуществления заявленного способа.
На фиг. 1 схематически изображен заявленный способ.
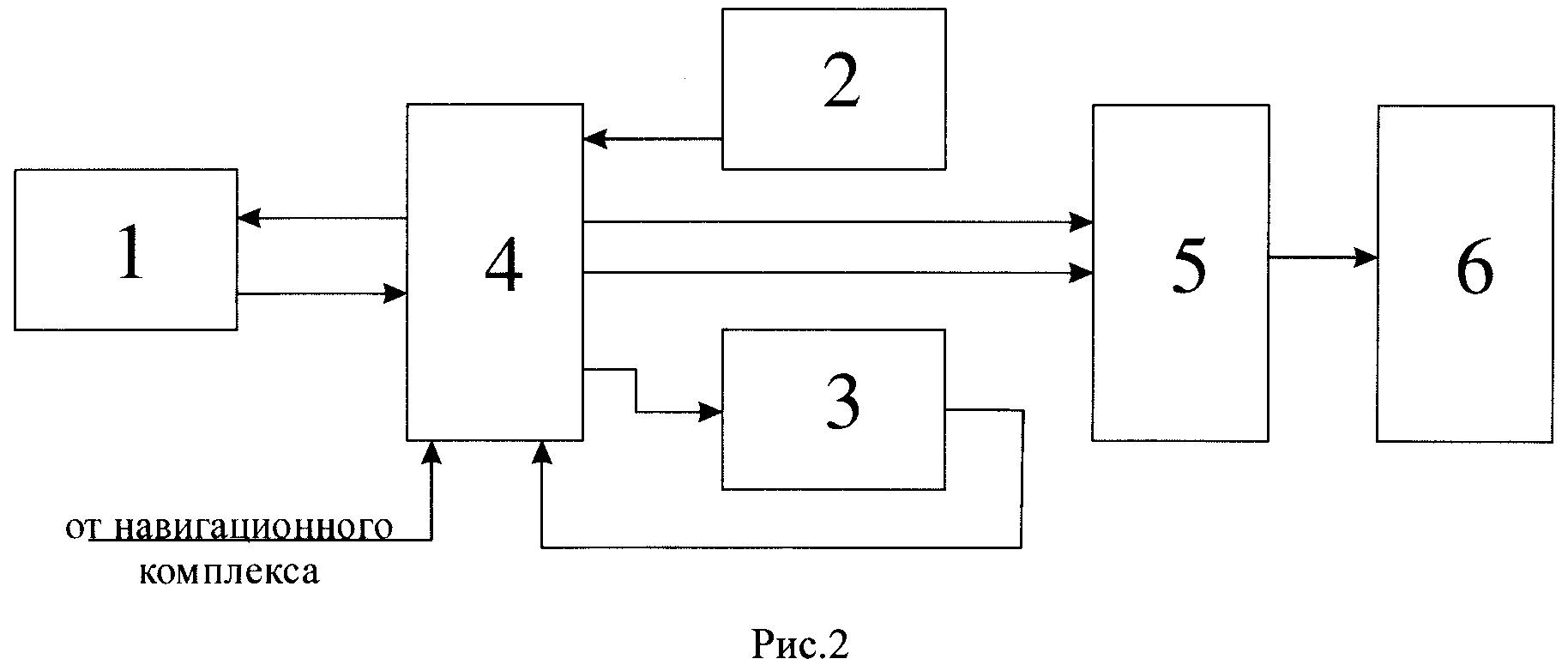
На фиг. 2 изображена структурная схема эхолота для осуществления заявленного способа.
Эхолот для осуществления заявленного способа содержит (фиг. 2):
приемоизлучающую систему - 1, передающий блок - 2, приемоизмерительный блок - 3, блок управления - 4, введенный блок определения истинных значений глубин и их геодезических координат, свободных от систематических погрешностей на акватории - 5, и регистратор - 6, при этом выход передающего блока - 2 и вход приемоизмерительного блока - 3 соединены соответственно через блок управления - 4 с входом и выходом приемоизлучающей антенны - 1, а также выходы приемоизмерительного блока - 3 и навигационного комплекса судна через блок управления - 4 соединены с входом введенного блока - 5 автоматического определения истинных глубин акватории и их геодезических координат свободных от случайных систематических погрешностей, выход которого соединен с входом регистратора - 6.
Заявленный способ съемки рельефа дна акватории реализуется заявленным многолучевым эхолотом следующим образом.
На акватории съемки заблаговременно оборудуют в заданном месте (местах) один опорный гидрографический пункт (ОГП) или два ОГП, в местах расположения которых устанавливают, например, существующие пассивные или активные акустические отражатели, и известными [1] высокоточными методами определяют глубину (относительно нуля глубин) в местах расположения ОГП и их геодезические координаты.
Вначале каждого галса и в конце его проходят судном через место расположения ОГП и измеряют в этот момент глубину и ее геодезические координаты заявленным эхолотом и их фиксируют.
Во время прохождения судна вдоль каждого галса по командным управляющим импульсам, выработанным блоком управления - 4, в передающем блоке - 2 осуществляется формирование гидроакустического импульса и излучение его приемоизлучающей системой - 1 в сторону поверхности дна, а также прием и преобразование в электрическую форму отраженных дном акустических сигналов, которые поступают на вход приемоизмерительного блока - 3, в котором вырабатываются электрические сигналы, пропорциональные временным задержкам прихода отраженных от поверхности дна гидрографических сигналов, по которым определяются глубины zэi от приемоизлучающей антенны - 1 до места отражения сигнала от поверхности дна акватории и время tэi определения глубины zэi, которые поступают в блок - 5 автоматического определения истинных глубин акватории и их геодезических координат, свободных от случайных систематических погрешностей на акватории.
По управляющим импульсам, выработанным блоком управления - 4, от навигационного комплекса судна поступают в блок - 5 гидрографические координаты антенны - 7 навигационного комплекса, координаты Δγδi Δγki, Δhki, бортовой, килевой и вертикальной качки соответственно; истинный курс судна ИКi и скорость υi движения судна относительно дна время измерений tki навигационным комплексом данных параметров для обработки информации.
В результате обработки указанной поступающей информации в блоке - 5 определяются истинные глубины zi+1 в местах отражения гидроакустического сигнала от поверхности дна акватории и их истинные гидрографические координаты φi+1, λi+1, которые поступают на вход регистратором - 6 для документирования полученных результатов. Передающий - 2 и приемоизмерительный - 3 блоки могут быть выполнены на базе ЭВМ типа PC/AT или в виде серийного микропроцессора.
Блок управления - 4 может быть выполнен на базе ЭВМ типа IBM PC/AT или в виде серийного микропроцессора.
Блок-5 автоматического определения истинных глубин акватории и их геодезических координат, свободных от случайных систематических погрешностей, может быть выполнен на основе ЭВМ PC/AT фирмы IBM со специальным программным обеспечением.
Предложенное техническое решение является новым, поскольку обеспечивает получение данных для исключения вычислительным путем случайных и систематических погрешностей, имеющих место при измерении глубин и их геодезических координат с эхолотом с требуемой точностью по всему диапазону глубин на акватории съемки.
Предложенное техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартное оборудование и приспособления, используемые для изготовления морских приборов и технических средств, а также существующие навигационные и гидрографические технические средства.
Анализ формул (1), (2), (3) показывает, что если принять гипотезу, что слагаемые под знаком суммы в правых частях не отягощены постоянными и периодически изменяемыми системами галсами погрешностями, поскольку в приращениях данные погрешности практически исключаются, а включают лишь случайные погрешности, которые малы по величине и имеют разные знаки, то при большом количестве измерений все указанные суммы будут стремиться к нулю. Следовательно, погрешность определения глубин и их координат будут определяться погрешностями геодезических координат и глубин в ОГП.
Геодезические координаты в ОГП могут быть определены путем использования высокочастотных РНС типа «Грас» или спутниковой навигационной системы типа «ГЛОНАС» или типа «GPS» в дифференциальном режиме работы, которая обеспечивает точность 0,1 м.
Глубина места нахождения на поверхности дна ОГП может быть определена, например, по местам на мерном тросе с грузом при его вертикальном положении. Минимальная цена деления на маркированном тросе не превышает 5 см, следовательно, погрешность глубины измерения мерным тросом не будет превышать 5 см.
Технико-экономическая эффективность заявленного способа съемки рельефа дна акватории и эхолота заключается в том, что обеспечивается автоматическое исключение указанных выше случайных и систематических погрешностей, имеющих место при съемке рельефа дна акватории эхолотом с требуемой точностью в процессе съемки рельефа дна акватории.
Источники информации
1. Баландин Л.А. и др. Средства и методы топографической съемки шельфа. М.: Недра. - с. 92,97.
2. Коломийчук Н.Д. Гидрография. ГУН и ОМО. 1988. - с. 257.


































Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения

