Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВЕКТОРА ЭЛЕКТРИЧЕСКОГО СИГНАЛА ПРОМЫШЛЕННОЙ ЧАСТОТЫ
Вид РИД
Изобретение
Изобретение относится к области электротехники, в частности к способу и устройству на его основе, в задачу которого входит определение параметров вектора электрического гармонического сигнала промышленной частоты, а именно его модуля и угла поворота вектора.
Для аналитического описания аналогового электрического синусоидального сигнала aс(t) промышленной частоты fс используют выражение

В выражении (1) применены обозначения: Am(c) - амплитуда аналогового синусоидального электрического сигнала ас(1) промышленной частоты fc; ψc - начальная фаза колебания мгновенного значения электрического синусоидального сигнала ac(t).
При решении ряда практических задач для момента времени t=0 аналоговый сигнал (1) представляют, например, в декартовой системе координат комплексной плоскости неподвижным вектором  (2, а) действующего значения синусоидальной функции (1), либо, например, неподвижным вектором
действующего значения синусоидальной функции (1) при условии отображении вектора в полярной системе координат, причем, когда условно принято, что полюс и полярная ось этой системы координат совпадают соответственно с началом координат комплексной плоскости и с направлением ее действительной оси +1, то неподвижный вектор действующего значения
в полярной системе координат может быть представлен выражением (2, б):
(2, а) действующего значения синусоидальной функции (1), либо, например, неподвижным вектором
действующего значения синусоидальной функции (1) при условии отображении вектора в полярной системе координат, причем, когда условно принято, что полюс и полярная ось этой системы координат совпадают соответственно с началом координат комплексной плоскости и с направлением ее действительной оси +1, то неподвижный вектор действующего значения
в полярной системе координат может быть представлен выражением (2, б):


В выражениях (2, а) значения Аx и Ay являются проекциями вектора
соответственно на действительную (+1) и мнимую (+j) оси комплексной плоскости, при этом угол ψc определяет угол поворота вектора
относительно действительной оси +1 комплексной плоскости (2, а); при векторном изображении (2, б) угол ψс - это угол поворота вектора
по отношению к отмеченному выше направлению полярной оси; причем модуль  | вектора
(2) с амплитудой Am(c) синусоидального электрического сигнала ac(t) (1) связан выражением
| вектора
(2) с амплитудой Am(c) синусоидального электрического сигнала ac(t) (1) связан выражением  .
.
Применительно к системе переменного тока промышленной частоты fс под синусоидальным электрическим сигналом (1) подразумевают гармонические или напряжение ac(t)=u(t) или ток ac(t)=i(t).
Информацию о действующем A (или амплитудном Am(c)) значении и начальной фазе ψc колебания синусоидального электрического сигнала промышленной частоты fc (1) используют в устройствах измерения, релейной защиты и автоматики объектов системы электроснабжения при решении задач, связанных с обеспечением требуемого функционирования этой системы, как в нормальном режиме, так и при возникновении в системе анормального режима.
Известны состоящие из блока нелинейного преобразователя (НП) и блока линейного преобразователя (ЛП) цифровые информационно-измерительные устройства (ЦИИУ) [Шнеерсон Э.М. Цифровая релейная защита. - М.: Энергоатомиздат, 2007. С. 39-40], причем блок НП осуществляет цифровую обработку поступающего на его вход мгновенного значения периодического электрического сигнала, при этом в основе цифровой обработки используют метод ортогональных составляющих, в основе которого положены адаптированные к особенностям цифровой обработки периодических электрических сигналов синус- и косинус-преобразования Фурье [Бессонов Л.А. Теоретические основы электротехники. Электрические цепи: Учебник. - 10-е изд. - М.: Гардарика, 2001. С. 204-206; Дьяков А.Ф. Микропроцессорная автоматика и релейная защита электроэнергетических систем: учебн. пособие для вузов / А.Ф. Дьяков, Н.И. Овчаренко. - М.: Издательский дом МЭИ, 2008. С. 17-19]. В результате предписанного алгоритма функционирования и выполнения соответствующих вычислительных процедур на выходе НП ЦИИУ и соответствующем формате получают информацию о модуле А и значении угла поворота ψс, причем при их вычислении используют полученные на основе синус- и косинус-преобразований Фурье значения проекций Аy и Ax вектора
на соответственно мнимую j и действительную +1 оси комплексной плоскости, при этом для вычислений модуля A и угла поворота ψc вектора
в алгоритме функционирования НП ЦИИУ используют такие нелинейные математические операции, как возведение в степень, извлечение квадратного корня, деление, определение обратной тригонометрической функции (2, а). Информация с выхода НП поступает на соответствующие входа линейного преобразователя (ЛП), который формирует на выходах ЦИИУ сигналы о значениях А и ψс в необходимом для дальнейшего использования формате другими компонентами устройств релейной защиты, автоматики или управления.
Реальный электрический сигнал f(t) во многих случаях является периодическим несинусоидальным электрическим сигналом с периодом повторения  , в котором любую кратную промышленной частоте fс k-ую гармонику представляют аналитическим выражением
, в котором любую кратную промышленной частоте fс k-ую гармонику представляют аналитическим выражением

где k=1, 2, 3, …, т.е. реальный электрический сигнал f(t) представляют состоящим из суммы гармоник, т.е.
Применив к сигналу (4) метод ортогональных составляющих, в конечном итоге получают такие основные параметры входящей в структуру несинусоидального сигнала f(t) любой k-ой гармоники (3), как значения ее амплитуды Am(k) и начального фазового угла колебания ψk. При номере гармоники k=1 на основе метода ортогональных составляющих получают информацию о действующем значении  и начальном фазовом угле колебания ψс синусоидального сигнала ac(t) промышленной частоты fс, которые далее принимаем соответственно за первый (амплитуда А) и второй (угол поворота ψс) параметры вектора
, отображающего в векторной форме электрический гармонический сигнал промышленной частоты (1).
и начальном фазовом угле колебания ψс синусоидального сигнала ac(t) промышленной частоты fс, которые далее принимаем соответственно за первый (амплитуда А) и второй (угол поворота ψс) параметры вектора
, отображающего в векторной форме электрический гармонический сигнал промышленной частоты (1).
Применение отмеченных выше нелинейных математических операций, при реализации метода ортогональных составляющих в нелинейном преобразователе (НП), обуславливает использование сложного алгоритма функционирования НП, и что, как следствие, усложняет структуру ЦИИУ, а также создает определенные сложности в достижении требуемой точности получаемой информации о значениях основных параметров k-ой гармоники.
В качестве близкого по технической сущности предлагаемому способу и выбранного в качестве прототипа является изобретение [Патент №2442180 (RU), MПK G01R 29/10. Способ определения параметров гармоники несинусоидального электрического сигнала / В.А. Мамаев (RU), Н.Н. Кононова (RU)) - №2010141201/28; заявл. 07.10.2010; опубл. 10.12.2012, бюл. №4].
В прототипе для получения значений амплитуды Аm(k) и начальной фазы колебания ψk гармоники с номером k (3), входящей в структуру периодического несинусоидального электрического сигнала f(t) (4), предложен способ функционирования нелинейного преобразователя (HП) цифрового информационно-измерительного устройства (ЦИИУ), который обеспечивает упрощение структуры нелинейного преобразователя (НП) за счет исключения при определении значений амплитуды Am(k) и начальной фазы колебания ψk k-ой гармоники выполнения некоторых математических нелинейных операций, например возведение в степень, извлечение квадратного корня, деление, поиск значения обратной тригонометрической функции. По прототипу применительно к любой k-ой гармонике функционирование нелинейного преобразователя (НП) основано на выполнении им вычислительных процедур с привлечением математического выражения следующей структуры

в котором: t0 - момент времени запуска в нелинейном преобразователе (НП) процесса выполнения операции интегрирования; Т=1/fс период колебания входящей в структуру несинусоидального периодического сигнала f(t) первой гармоники (k=1); θ - дополнительный изменяемый (скользящий) вводимый в вычислительном процессе фазовый угол, который изменяют в диапазоне от 0 до 2π.
По своей сущности среди предлагаемых в прототипе трех вариантов получения значений амплитуды Аm(k) и начальной фазы колебания ψk k-ой гармоники ak(t) (4) предлагаемому изобретению близок вариант, в основе которого в вычислительном процессе нелинейный преобразователь (НП) осуществляет вычисления по выражению (5) в условиях изменения дополнительного вводимого в вычислительный процесс фазового угла θ.
В прототипе для определения параметров k-ой гармоники нелинейный преобразователь (НП) осуществляет последовательно две операции интегрирования. Первую операцию интегрирования осуществляют по времени t согласно выражению (5) на интервале периода Т несинусоидального периодического сигнала f(t), при этом в качестве подынтегрального выражения используют произведение двух сомножителей, при этом первый сомножитель является периодическим несинусоидальным электрическим сигналом f(t) (3), а вторым сомножителем является вспомогательная функция синуса fвсп(t, θ) (6), аргумент которой состоит из двух слагаемых, первое из которых связано с временем t, а вторым слагаемым является дополнительно вводимый в вычислительный процесс изменяемый (скользящий) фазовый угол θ:

В результате интегрирования формируется набор данных, который аналитически связан только с амплитудой Am(k) k-ой гармоники и с вводимым в вычислительный процесс дополнительным изменяемым (скользящим) фазовым углом θ, при этом эти данные являются отображением следующей косинусоидальной зависимости

Следующие действия нелинейного преобразователя (НП) по прототипу направлены на поиск координат максимума функции (7), которые однозначно определяют значения начальной фазы колебания θk=ψk и амплитуды Am(k)=A(k)(θk) k-ой гармоники ak(t) (3). При номере гармоники k=1 способ по прототипу обеспечит получение параметров электрического сигнала ac(t) (1) промышленной частоты fс, т.е. Am(c)=Am(l) и ψc=θk=ψk, которые могут быть использованы в качестве формирования параметра вектора
.
Недостатком способа по прототипу является достаточно сложный алгоритм функционирования нелинейного преобразователя (НП) цифрового информационно-измерительного устройства (ЦИИУ), обеспечивающего получение значения начальной фазы ψс колебания электрического синусоидального сигнала ac(t) промышленной частоты fс, так как нелинейным преобразователь (НП) цифрового информационно-измерительного устройства (ЦИИУ) выполняет соответствующие математические операции для получения массива численных значений функции (5) в широком диапазоне значений угла θ, и на основе данных этого массива осуществляет поиск координат максимума функции (7), с которыми однозначно можно связать первый и второй параметры вектора
, а именно его модуль А и угол поворота ψс, кроме того, значение амплитуды Аm(k=1)=Аm(с) (см. (5) и (7)) могут изменяться в широком диапазоне значений, что может проявиться в качестве негативного фактора, сказывающегося на точности определения параметров вектора
.
Теоретической основой предлагаемого способа определения параметров вектора электрического сигнала промышленной частоты fс, а именно угла поворота ψc вектора
и его модуля А (2), является следующее.
Как и в прототипе, для k=1 нелинейный преобразователь (НП) цифрового информационно-измерительного устройства (ЦИИУ) формирует первый вспомогательный синусоидальный сигнал fвсп_1(t, θ) (8) промышленной частоты fс:

у которого единичная амплитуда, а аргумент функции синуса состоит двух слагаемых, одно из которых через операцию умножения связано с промышленной частотой fс и временем t, а второе слагаемое является вводимым в вычислительный процесс дополнительным изменяемым (скользящим) фазовым углом θ:
Согласно предлагаемому изобретению для подводимого к цифровому информационно-измерительному устройству (ЦИИУ) электрического синусоидального сигнала ac(t) (1) промышленной частоты fс его нелинейный преобразователь (НП) по выражению (9) определяет такой интегральный параметр этого сигнала, как действующее значение А сигнала ас(1):

Согласно предлагаемому изобретению нелинейный преобразователь (НП) осуществляет деление подводимого к цифровому информационно-измерительному устройству (ЦИИУ) электрического синусоидального сигнала ac(t) (1) промышленной частоты fс на полученное по выражению (9) его действующее значение A (9) и в результате получают второй вспомогательный сигнал fвсп_2(t) со структурой

Согласно предлагаемому изобретению нелинейный преобразователь (НП) перемножает второй вспомогательный сигнал (10) и первый вспомогательный сигнал fвсп_1(t) (8) и получают третий вспомогательный сигнал fвсп_3(t, θ), состоящий из двух слагаемых, одно из которых однозначно зависит только от разности значения искомого фазового угла ψc и вводимого в вычислительный процесс изменяемого (скользящего) угла θ, а второе слагаемое является некоторой гармонической функцией косинуса (11):

Далее нелинейный преобразователь (НП) выполняет операцию интегрирования третьего вспомогательного сигнала fвсп_3(t, θ) (11) по времени в пределах от t0 до t0+T и формирует структуру четвертого вспомогательного сигнала fвсп_4(θ) (12), текущие значения которого не зависят от значения амплитуды Аm(c) подводимого к ЦИИУ сигнала a(t) (1), текущее значение определяется только численным значением водимого в вычислительный процесс изменяемого (скользящего) фазового угла θ, при этом максимальное значение четвертого вспомогательного сигнала fвсп_4(θ) не может превышать значения  :
:

Согласно предлагаемому изобретению в процессе вычисления текущего значения зависимости (12) нелинейный преобразователь (НП) осуществляет поиск такого значения скользящего фазового угла θc, при котором четвертый вспомогательный сигнал fвсп_4(θ) (12) будет равен или с заданной погрешностью близок числовой константе, а именно  :
:

Согласно предлагаемому изобретению основанная на выражениях (8), (9), (12) и условии (13) последовательность действий может быть использована в основе организации функционирования соответствующих субблоков нелинейного преобразователя (НП) цифрового информационно- измерительного устройства (ЦИИУ), что обеспечит получение значений первого и второго параметров вектора
, т.е. его модуля А и угла поворота ψc, так как при равенстве ψc=θс функция (13) приобретает значение  .
.
В условиях функционирования системы электроснабжения переменного тока реальный электрический сигнал ас.(реал.)(t) помимо основного электрического сигнала ac(t) (1) с промышленной частотой fс и своем составе может иметь кратные этой частоте гармоники, т.е. подводимый к цифровому информационно-измерительному устройству (ЦИИУ) периодический электрический сигнал ас.(реал.)(t) может быть «зашумлен гармониками», т. е. в этом случае являться негармонической, но периодической функцией времени t:

Если учесть, что амплитуды k-ых гармоник в системе электроснабжения во многих практических случаях заметно меньше амплитуды основной гармоник промышленной частоты fс, то действующее значение Ас.(реал) реального периодического несинусоидального электрического сигнала ас.(реал.)(t) в этих условиях будет близко к действующему значению A гармоники основной частоты fс(k=1)

Из этого следует, что при решении конкретной практической задачи при относительно слабых «помехах» от гармоник с частотой, большей промышленной fс, и при соблюдении условия, когда численное значение выражения (13) будет близким значению
, то предлагаемый способ может обеспечить приемлемую точностью определения угла поворота ψc вектора некоторой фиктивной (расчетной) синусоиды  , модуль Aф которой будет близок модулю A гармоники с частотой fс.
, модуль Aф которой будет близок модулю A гармоники с частотой fс.
Технический результат, достигаемый при использовании предлагаемого способа, состоит в упрощении функционирования цифрового информационно-измерительного устройства (ЦИИУ) и повышении его технического уровня.
Сущность предлагаемого изобретения заключается в способе определения параметров вектора
электрического сигнала промышленной частоты fс, а именно модуля A и угла поворота ψс вектора, которые соответственно рассматривают как первый и второй параметры вектора
, при этом определение параметров вектора осуществляет цифровое информационно-измерительное устройство (ЦИИУ), включающее в свою структуру два блока, первый из которых является нелинейным преобразователем (НП) и состоит из нескольких субблоков, имеет один вход и два выхода, а второй блок выполняет функции линейного преобразователя (ЛП) и имеет два входа и два выхода, при этом на вход второго субблока нелинейного преобразователя (НП) подают аналоговый электрический синусоидальный сигнал ac(t) (1) промышленной частоты fс, на первый выход нелинейного преобразователя (НП) выводят информацию A, которая является некоторым интегральным параметром аналогового электрического синусоидального сигнала ac(t) (1), на его второй выход выводят информацию о начальном фазовом сдвиге ψс аналогового электрического синусоидального сигнала aс(t) (1), причем с первого и второго выходов нелинейного преобразователя (НП), сигналы поступают соответственно на первый и второй входы линейного преобразователя (ЛП), который на своих первом и втором выходах в форматах, необходимых для последующего применения в конкретных устройствах измерения, релейной защиты и автоматики, выдает информационные выходные сигналы Авых и ψc.вых, которые согласно предлагаемому изобретению однозначно связывают соответственно с первым параметром вектора
, а именно модулем A, и вторым параметром вектора
, а именно с углом ψc поворота вектора
, который также является фазовым угловым сдвигом ψс аналогового электрического синусоидального сигнала ac(t) (1), при этом входящий в структуру нелинейного преобразователя (НП) первый субблок на своем выходе формирует первый синусоидальный вспомогательный сигнал fвсп_1(t, θ) (8) с единичной амплитудой, причем аргумент функции синуса состоит из двух слагаемых, первое из которых является произведением времени t и промышленной частоты fc, т.е. 2πfс·t, а второе слагаемое является вводимым в вычислительный процесс изменяемым (скользящим) фазовым углом θ.
Отличается тем, что с целью упрощения функционирования цифрового информационно-измерительного устройства (ЦИИУ) и повышения его технического уровня в структуре его нелинейного преобразователя (НП) предусмотрены второй, третий, четвертый и пятый субблоки, при этом второй субблок имеет один вход и один выход, причем второй субблок нелинейного преобразователя (НП) для поданного на его вход аналогового электрического синусоидального сигнала ac(t) (1) промышленной частоты fс вычисляет такой его интегральный параметр, как его действующее значение А (9), который принимают за первый параметр вектора
, при этом значение этого параметра с выхода второго субблока подают на первый выход нелинейного преобразователя (НП) и далее на первый вход линейного преобразователя (ЛП), а также значение первого параметра вектора
с выхода второго субблока подается на первый вход третьего субблока, причем на второй вход третьего субблока с входа второго субблока подают аналоговый электрический синусоидальный сигнал ac(t) (1) промышленной частоты fc, при этом третий субблок выполняет операцию деления поданного на его второй вход аналогового электрического синусоидального сигнала ac(t) (1) на поданное на первый вход третьего субблока действующее значение А (9) аналогового электрического синусоидального сигнала ac(t) (1), и результат этого деления в виде второго, зависимого только от времени t, вспомогательного сигнала fвсп_2(t) (10) с выхода третьего субблока подают на первый вход четвертого субблока, а на второй вход четвертого субблока с выхода первого субблока подают первый синусоидальный вспомогательный сигнал fвсп_1(t, θ), причем четвертый субблок осуществляет перемножение сигналов, поданных соответственно на его первый и второй входы, при этом на выход четвертого субблока выводят третий вспомогательный сигнал fвсп_3(t, θ), который является функцией двух параметров, а именно времени t и вводимого в вычислительный процесс изменяемого (скользящего) фазового угла θ, причем третий вспомогательный сигнал fвсп_3(t, θ) подают на вход пятого субблока, который осуществляет два интегрирования, а именно первое интегрирование осуществляет по времени t в пределах периода, равного Т=1/fс, и, с привлечением результатов первого интегрирования на интервале от 0 до 2π, вычисляет второй интеграл, но по параметру вводимого в вычислительный процесс изменяемому (скользящему) углу θ и при этом выполняет поиск такого численного значения этого угла, при котором результат второго интегрирования будет равен или с принятой погрешностью близок к константе  , при этом значение вводимого угла θ, при котором соблюдается это условие, принимают за угол поворот ψc вектора
(2), являющегося векторным изображением аналогового электрического синусоидального сигнала aс(t) (1) промышленной частоты fс, причем информацию об угле поворота ψc подают на второй выход нелинейного преобразователя (НП) и далее на второй вход линейного преобразователя (ЛП), причем, если вследствие имеющих место в электрической сети процессов мгновенное значение периодического электрического сигнала, подводимого к входу второго субблока нелинейного преобразователя (НП) цифрового информационно-измерительного устройства (ЦИИУ), не будет гармоническим, то по предлагаемому способу в результате выполнения описанных выше последовательности действий на выход цифрового информационно-измерительного устройства (ЦИИУ) будет выведена информация о первом А и втором ψc параметрах некоторого вектора, который при определенных условиях могут считаться параметрами, которые с приемлемой точностью близки реальным параметрам гармоники промышленной частоты fс, входящей в структуру реального периодического, но несинусоидального сигнала ас.(реал)(t) (14).
, при этом значение вводимого угла θ, при котором соблюдается это условие, принимают за угол поворот ψc вектора
(2), являющегося векторным изображением аналогового электрического синусоидального сигнала aс(t) (1) промышленной частоты fс, причем информацию об угле поворота ψc подают на второй выход нелинейного преобразователя (НП) и далее на второй вход линейного преобразователя (ЛП), причем, если вследствие имеющих место в электрической сети процессов мгновенное значение периодического электрического сигнала, подводимого к входу второго субблока нелинейного преобразователя (НП) цифрового информационно-измерительного устройства (ЦИИУ), не будет гармоническим, то по предлагаемому способу в результате выполнения описанных выше последовательности действий на выход цифрового информационно-измерительного устройства (ЦИИУ) будет выведена информация о первом А и втором ψc параметрах некоторого вектора, который при определенных условиях могут считаться параметрами, которые с приемлемой точностью близки реальным параметрам гармоники промышленной частоты fс, входящей в структуру реального периодического, но несинусоидального сигнала ас.(реал)(t) (14).
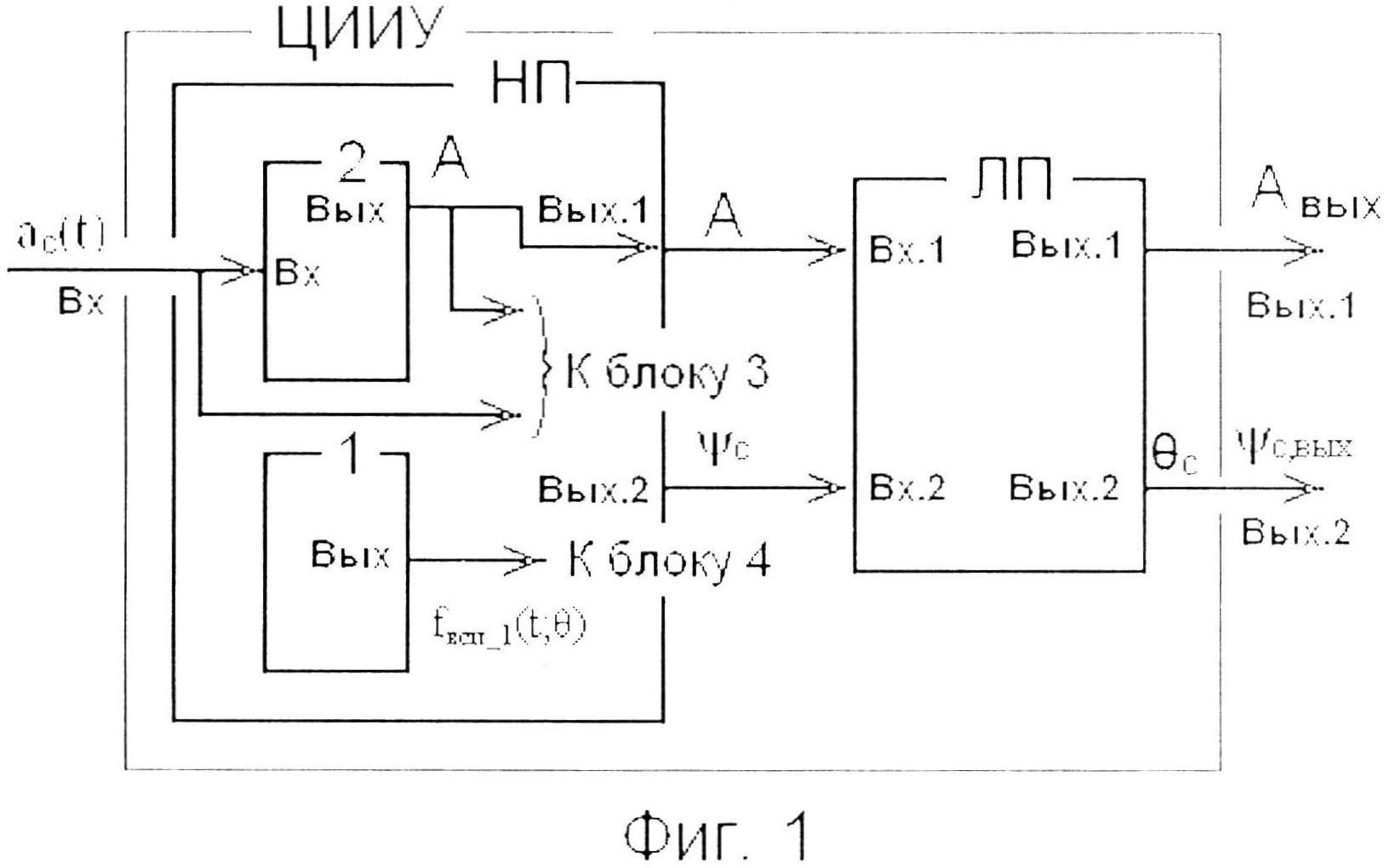
На фиг. 1 приведена упрощенная структура цифрового информационного устройства (ЦИИУ), который имеет нелинейный преобразователь (НП) и линейный преобразователь (ЛН), при этом НП состоит из пяти субблоков (фиг. 2). НП имеет один вход Вх, он же считается входом ЦИИУ, и два выхода (Вых. 1 и Вых. 2). На вход ЦИИУ и одновременно на вход Вх НП подают электрический сигнал ac(t) промышленной частоты fс (1), который также подают на единственный вход субблока 2. Субблок 1 нелинейного преобразователя (НП) на своем единственном выходе Вых выдаст зависящий от времени t первый синусоидальный вспомогательный сигнал fвых_1(t, θ) (8), который имеет единичную амплитуду, причем для изменения начальной фазы колебания этого сигнала в аргумент функции синуса вводят изменяемый (скользящий) фазовый угол θ, что является необходимым условием выполнения ЦИИУ соответствующих вычислительных процедур, связанных с получением информации о значении угла ψс поворота вектора
(2). Субблок 2 в результате выполнения вычислительных процедур по выражению (9) на свой единственный выход Вых выводит значение А электрического сигнала ac(t) промышленной частоты fс, при этом значение А выводят на первый выход Вых. 1 НП, с которого подают на первый вход Вх. 1 линейного преобразователя (ЛП), который поступивший на этот вход сигнал преобразует в необходимый для последующего использования формат и в виде информационного сигнала Авых поступает на первый выход Вых. 1 ЛП и далее на первый выход Вых. 1 ЦИИУ, при этом информацию, содержащуюся в сигнале Авых, однозначно связывают с одним из параметров вектора
, а именно с величиной его модуля А (2). Нелинейный преобразовать (HП) по предлагаемому в изобретении способу выполняет выше описанные в сущности изобретения вычислительные процедуры и на своем втором выходе Вых. 2 формирует некоторую информацию, связанную с со значение угла ψс поворота вектора
(2). Со второго выхода Вых. 2 нелинейного преобразователя (НП) эту информацию подают на второй вход Вх. 2 линейного преобразователя (ЛП), который после приведения этой информации в формат, необходимый для последующего использования, в виде информационного сигнала ψс.вых подают на второй выход Вых. 2 ЛП и далее на второй выход Вых. 2 ЦИИУ, при этом информацию, содержащуюся в сигнале ψс.вых, однозначно связывают со вторым параметром вектора
, а именно с величиной угла поворота ψc вектора
(2). В отдельных случаях в структуре цифрового информационно-измерительного устройства (ЦИИУ) линейный преобразовать (ЛП) может отсутствовать.
На фиг. 2 приведена структура нелинейного преобразователя (НП), входящего в цифровое информационно-измерительное устройство (ЦИИУ) (фиг. 1). НП включает пять субблоков. Функциональное назначение первого и второго субблоков изложено при описании фиг. 1. С учетом выполняемых функций первым и вторым субблоками третий, четвертый и пятый субблоки функционируют и решают следующие задачи. С единственного выхода второго субблока 2 на первый вход Вх. 1 третьего субблока 3 подают численное значение А, а на второй вход Вх. 2 третьего субблока 3 с входа Вх второго субблока 2 (входа НП) подают электрический сигнал ac(t) промышленной частоты fc (1). Третий субблок 3 осуществляет деление поданного на его второй вход электрического сигнала ac(t) на поданный на его первый вход численное значение А и результат деления в виде зависящего от времени второго вспомогательного сигнала fвсп_2(t) (10) поступает на единственный выход третьего субблока 3 и далее поступает на первый вход Вх. 1 четвертого субблока 4, на второй вход Вх. 2 которого с выхода первого субблока 1 подают первый вспомогательный сигнал fвсп_1(t, θ) (6). Четвертый субблок 4 осуществляет перемножение поданных на его первый и второй входы сигналов и результат этого перемножения в виде третьего вспомогательного сигнала fвсп_3(t, θ) подает на его единственный выход Вых. Третий вспомогательный сигнал fвсп_3(t, θ) является функцией времени t и вводимого в вычислительный процесс дополнительного угла θ, при этом этот сигнал подают на единственный вход Вх пятого субблока 5. Этот субблок осуществляет две операции определенного интегрирования, при этом первая операция интегрирования осуществляется по времени t на интервале периода Т, соответствующего промышленной частоте fс, а вторая операция интегрирования осуществляется с привлечением результатов первого интегрирования по вводимому в вычислительный процесс дополнительному углу θ с поиском такого его значения θс в диапазоне изменения от 0 до 2π, при котором численное значение выполнения операции второго интегрирования будет равно  или с допустимой погрешностью близко к нему. Выведенное на выход Вых пятого субблока 5 значение угла θс однозначно считают вторым параметром вектора
, т.е. его углом поворота ψс вектора
.
или с допустимой погрешностью близко к нему. Выведенное на выход Вых пятого субблока 5 значение угла θс однозначно считают вторым параметром вектора
, т.е. его углом поворота ψс вектора
.
Способ может быть реализован на основе известных методов цифровой обработки электрических сигналов с использованием схемотехнических решений, используемых в цифровой технике.
Способ определения параметров вектора электрического сигнала промышленной частоты f на основе цифрового информационно-измерительного устройства, состоящего из двух блоков, а именно блока нелинейного преобразователя и блока линейного преобразователя, при этом нелинейный преобразователь имеет один вход и два выхода, причем к его входу подведен электрический сигнал промышленной частоты f, а на каждом из двух выходов нелинейного преобразователя выводится информация, связанная со значениями модуля и угла поворота вектора электрического сигнала промышленной частоты f, причем линейный преобразователь имеет два входа, каждый из которых связан только с соответствующим выходом нелинейного преобразователя, при этом линейный преобразователь имеет два выхода, причем на эти выходы выводится в формате, необходимом для последующего использования, а именно на его первом выходе выдается информация, которая однозначно связана с некоторым интегральным параметром, который однозначно определяет модуль вектора, а на другой выход выводят информацию об угле поворота этого вектора, при этом структура нелинейного преобразователя включает несколько субблоков, среди которых первый субблок имеет один выход, на который выводят генерируемый им первый вспомогательный синусоидальный сигнал промышленной частоты с единичной амплитудой, причем аргумент функции синуса задают через сумму двух изменяемых слагаемых, при этом первое слагаемое определяется произведением 2πf·t, а второе слагаемое является вводимым в вычислительный процесс изменяемым (скользящим) фазовым углом θ, отличающийся тем, что с целью упрощения функционирования цифрового информационно-измерительного устройства и повышения его технического уровня в структуру его нелинейного преобразователя включены второй, третий, четвертый и пятый субблоки, при этом второй субблок имеет один вход и один выход, причем как на его единственный вход, так и на второй вход третьего субблока подают аналоговый электрический синусоидальный сигнал a(t) промышленной частоты f, при этом второй субблок определяет такой его интегральный параметр, как действующее значение A, которое однозначно связывают с модулем вектора , при этом информацию о значении A передают на первый вход линейного преобразователя и первый вход третьего субблока, при этом третий субблок выполняет операцию деления поданного на его второй вход аналогового электрического синусоидального сигнала a(t) на поданный со второго субблока на первый вход третьего субблока действующего значения аналогового электрического синусоидального сигнала a(t), при этом результат этого деления в виде второго зависимого только от времени t вспомогательного сигнала с выхода третьего субблока подают на первый вход четвертого субблока, а на второй вход четвертого субблока с выхода первого субблока подают первый синусоидальный вспомогательный сигнал, причем четвертый субблок осуществляет перемножение сигналов, поданных соответственно на его первый и второй входы, при этом результат перемножения в виде третьего вспомогательного сигнала выводят на выход четвертого субблока, при этом третий вспомогательный сигнал является функцией двух параметров, а именно времени t и вводимого в вычислительный процесс изменяемого (скользящего) фазового угла θ, причем третий вспомогательный сигнал подают на вход пятого субблока, который осуществляет первое интегрирование по времени t в пределах задаваемого промышленной частотой f периода, и к полученной после первого интегрирования функциональной зависимости применяют операцию второго интегрирования по параметру вводимого в вычислительный процесс изменяемого (скользящего) угла θ и на интервале от 0 до 2π определяют такое значение угла θ, при котором численное значение второго интегрирования будет равно или с принятой погрешностью близко этому значению, при этом удовлетворяющий этому условию изменяемый (скользящий) угол θ принимают за угол поворота ψ вектора , являющегося векторным изображением электрического сигнала промышленной частоты f, причем информация об угле поворота ψ подается на второй выход нелинейного преобразователя НП и далее на второй вход линейного преобразователя.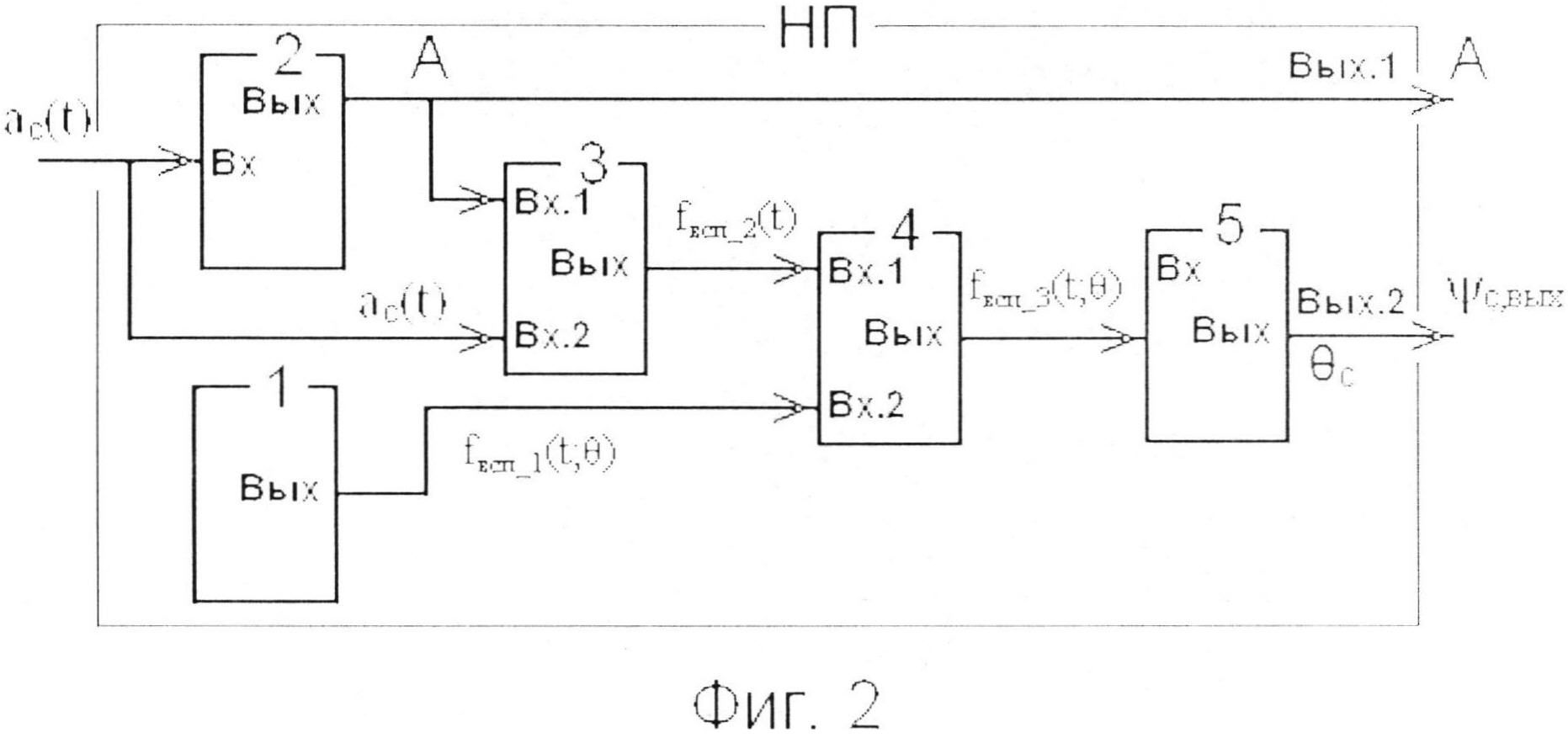

Сырокопченая колбаса с использованием многоцелевого функционального модуля и способ ее производства
Способ производства сырных продуктов
Способ производства вареной куриной колбасы
Способ передачи информации в системах с кодовым разделением каналов и устройство для его осуществления
Способ получения значений ортогональных проекций одного вектора на направление другого вектора двух одночастотных электрических сигналов
Устройство для обнаружения переполнения динамического диапазона, определения ошибки и локализации неисправности вычислительного канала в эвм, функционирующих в системе остаточных классов
Способ получения мороженого
Гетероструктуры sic/si и diamond/sic/si, а также способы их синтеза
Накапливающий сумматор по модулю
Металлическая конструкция с решеткой из ромбических замкнутых гнутосварных профилей
Сырокопченая колбаса с использованием многоцелевого функционального модуля и способ ее производства
Способ производства сырных продуктов
Способ производства вареной куриной колбасы
Способ передачи информации в системах с кодовым разделением каналов и устройство для его осуществления
Способ получения значений ортогональных проекций одного вектора на направление другого вектора двух одночастотных электрических сигналов
Устройство для обнаружения переполнения динамического диапазона, определения ошибки и локализации неисправности вычислительного канала в эвм, функционирующих в системе остаточных классов
Полный одноразрядный сумматор по модулю
Способ получения мороженого
Гетероструктуры sic/si и diamond/sic/si, а также способы их синтеза
Накапливающий сумматор по модулю

