Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ
Вид РИД
Изобретение
Изобретение относится к области судовождения - автоматическому управлению движением судна по заданному направлению.
Известен способ автоматического управления движением судна по заданному курсовому углу, реализованный в «Системе автоматического управления движением судна» (патент RU 2248914, март 2005 г. [1]). Способ управления движением судна основан на использовании информации от приемника спутниковой навигационной системы, задатчика путевого угла и регулятора-сумматора, в котором по сигналам: текущего путевого угла, заданного курсового угла, угловой скорости судна формируется результирующий сигнал для управления рулевым приводом судна.
Известен также способ автоматического управления движением корабля с использованием динамической модели углового движения корабля (см. патент RU №2223197, апрель 2004 г. [2]). Аппаратура автоматического управления движением судна, содержащая задатчик курсового угла, датчик угла перекладки руля, приемник спутниковой навигационной системы, рулевой привод, дифференциатор и сумматор, первый вход которого соединен с выходом задатчика курсового угла, выход приемника СНС соединен с вторым входом сумматора, к третьему входу которого подключен выход датчика угла перекладки руля, выход сумматора соединен с входом рулевого привода, четвертый вход сумматора соединен с выходом динамической модели углового движения судна. На выходе динамической модели движения судна формируется оценка угла курса. Сигнал оценки угла курса алгебраически суммируется с сигналом угла курса с выхода приемника СНС. Разность этих сигналов вводится на вход динамической модели движения судна.
В известном способе управления движения судна [2] формируются следующие сигналы для обеспечения автоматического управления движением судна.
В задатчике курсового угла формируется сигнал заданного угла курса ϕзд=f(t), который вводится на вход сумматора, на второй вход которого поступает сигнал оценки угла курса  . Сигнал оценки
. Сигнал оценки  вводится с выхода электронной (динамической) модели движения судна. Для формирования сигнала оценки угла курса на вход электронной модели движения корабля вводится сигнал угла перекладки руля δ от датчика рулевого привода, сигнал измеренного угла курса ϕ и сигнал оценки угла курса
вводится с выхода электронной (динамической) модели движения судна. Для формирования сигнала оценки угла курса на вход электронной модели движения корабля вводится сигнал угла перекладки руля δ от датчика рулевого привода, сигнал измеренного угла курса ϕ и сигнал оценки угла курса  (с выхода электронной модели движения судна) в виде невязки
(с выхода электронной модели движения судна) в виде невязки 
Таким образом на выходе сумматора-регулятора формируется сигнал заданного значения угла перекладки руля δзд:

где ϕзд - сигнал заданного курса с задатчика курсового угла,
 - сигнал оценки угла курса с выхода электронной модели движения судна,
- сигнал оценки угла курса с выхода электронной модели движения судна,
δзд - сигнал заданного значения угла перекладки руля (с выхода сумматора вводится на вход рулевого привода).
Недостатками известных способов управления движением являются:
- при появлении медленно меняющихся внешних возмущений, воздействующих на судно в процессе плавания, формируется смещение (ошибка) в управлении судном по курсу,
- сложность прохождения судном в автоматическом режиме управления узкостей и возможных преград.
Известен также способ управления движением судна (патент RU №2492105 С1, 10.09.2013 [3]), который лишен отдельных недостатков.
Техническим результатом известного способа управления движением судна [3] является:
- восстановление (выработка в блоке интегрирования оценок) медленно меняющихся внешних возмущений по силе - Р и моменту - М, воздействующих на судно в процессе плавания,
- введение сигнала восстановленных внешних возмущений по Р и М в систему автоматического управления движением судна, что позволило повысить точность управления движения судна по заданной траектории(исключить смещение (ошибку) по углу курса при наличии медленно меняющихся внешних возмущений).
Технический результат достигается при использовании:
- интегратора, на выходе которого формируется сигнал, пропорциональный внешним возмущениям, действующим на судно,
- сигнала курсового угла ϕ и оценки курсового угла  (для формирования невязки
(для формирования невязки  , которую подключают к входу интегратора,
, которую подключают к входу интегратора,
- сигнала  , сформированного на выходе интегратора, вводимого в регулятор-сумматор.
, сформированного на выходе интегратора, вводимого в регулятор-сумматор.
Однако компенсация медленно меняющихся возмущений судна осуществляется только по курсу, при этом не учитываются возмущения, обусловленные влиянием ветра и волнения и приводящие к потере скорости судна от влияния ветра и волнения, а также не учитываются возмущения, обусловленные влиянием качки судна.
Кроме того, не учитывается фактическая осадка судна.
Использование известного технического решения [3] возможно только при спокойном море. При сильном волнении на море и при плавании в стесненных обстоятельствах плавания использование известного технического решения [3] является малоэффективным, так как результирующий сигнал столь зашумлен внешними возмущениями по каналу угловой скорости судна, что использовать такое устройство практически невозможно.
Задачей предлагаемого технического решения является уменьшение или исключение негативных возмущений, оказывающих влияние на движущееся судно в стесненных обстоятельствах плавания.
Поставленная задача решается за счет того, что в способе управления движением судна с компенсацией медленно меняющихся возмущений, который характеризуется тем, что используется задатчик курсового угла, приемник спутниковой навигационной системы, рулевой привод, электронная модель движения судна и регулятор-сумматор, на входе которого формируют сигналы:
- заданного угла курса ϕзд=f(t) из задатчика курсового угла,
- оценку угла курса  с выхода электронной модели движения судна,
с выхода электронной модели движения судна,
-  , производной от оценки угла курса, которая формируется в блоке регулятора-сумматора; на входе электронной модели движения судна формируют:
, производной от оценки угла курса, которая формируется в блоке регулятора-сумматора; на входе электронной модели движения судна формируют:
сигнал угла перекладки руля δ от датчика рулевого привода, сигнал невязки  , где: сигнал угла курса ϕ формируется с приемника спутниковой навигационной системы, а сигнал оценки угла курса
, где: сигнал угла курса ϕ формируется с приемника спутниковой навигационной системы, а сигнал оценки угла курса  формируется с выхода электронной модели движения судна, отличающийся тем, что используется интегратор, на входе которого формируется сигнал невязки
формируется с выхода электронной модели движения судна, отличающийся тем, что используется интегратор, на входе которого формируется сигнал невязки  , где: сигнал ϕ - с приемника спутниковой навигационной системы, а сигнал - с выхода электронной модели движения судна, сигнал с выхода интегратора
, где: сигнал ϕ - с приемника спутниковой навигационной системы, а сигнал - с выхода электронной модели движения судна, сигнал с выхода интегратора  вводится на вход регулятора-сумматора, при этом на выходе регулятора-сумматора формируется сигнал
вводится на вход регулятора-сумматора, при этом на выходе регулятора-сумматора формируется сигнал  который вводится с выхода регулятора-сумматора на вход рулевого привода, в отличие от прототипа [3] для оценки угловой скорости судна на вход модели угловой скорости судна поступает сигнал перекладки руля в виде разности между текущим значением угла перекладки руля и балансировочным значением угла перекладки руля, формируемой в функциональном преобразователе, а на выходе модели угловой скорости судна вырабатывается составляющая угловой скорости судна, зависящая только от управляющего воздействия, а в систему управления движением судна с компенсацией медленно меняющихся внешних возмущений, содержащую датчик курсового угла ϕзд, приемоиндикатор спутниковой навигационной системы, интегратор, регулятор-сумматор, рулевой привод, электронную модель движения судна, объект управления - судно, в которой датчик курсового угла своим выходом соединен со входом регулятора-сумматора, который еще одним входом соединен с выходом интегратора и еще одним входом соединен с выходом электронной модели судна, а своим выходом регулятор-сумматор соединен со входом рулевого привода, выход которого соединен с входом исполнительных механизмов объекта управления и этим же выходом соединен со входом электронной модели движения судна, которая вторым входом соединена с выходом приемника спутниковой навигационной системы, второй выход электронной модели движения судна соединен со входом интегратора, дополнительно введены датчик угловых ускорений, датчик угловых скоростей, функциональный преобразователь, электронная картографическая навигационная информационная система, при этом выход датчика угловых ускорений и датчика угловых скоростей соединены со входами функционального преобразователя, который другими своими входами соединен с выходами соответственно датчика курсового угла, приемоиндикатора спутниковой навигационной системы, судового измерителя скорости, функциональный преобразователь своим входом-выходом соединен с входом-выходом электронной модели движения судна, другим входом-выходом соединен с входом-выходом рулевого привода и еще одним выходом соединен с входом электронной картографической навигационной информационной системы, которая другими входами соединена с соответствующими выходами рулевого привода, электронной модели движения судна, судового измерителя скорости и судового эхолота.
который вводится с выхода регулятора-сумматора на вход рулевого привода, в отличие от прототипа [3] для оценки угловой скорости судна на вход модели угловой скорости судна поступает сигнал перекладки руля в виде разности между текущим значением угла перекладки руля и балансировочным значением угла перекладки руля, формируемой в функциональном преобразователе, а на выходе модели угловой скорости судна вырабатывается составляющая угловой скорости судна, зависящая только от управляющего воздействия, а в систему управления движением судна с компенсацией медленно меняющихся внешних возмущений, содержащую датчик курсового угла ϕзд, приемоиндикатор спутниковой навигационной системы, интегратор, регулятор-сумматор, рулевой привод, электронную модель движения судна, объект управления - судно, в которой датчик курсового угла своим выходом соединен со входом регулятора-сумматора, который еще одним входом соединен с выходом интегратора и еще одним входом соединен с выходом электронной модели судна, а своим выходом регулятор-сумматор соединен со входом рулевого привода, выход которого соединен с входом исполнительных механизмов объекта управления и этим же выходом соединен со входом электронной модели движения судна, которая вторым входом соединена с выходом приемника спутниковой навигационной системы, второй выход электронной модели движения судна соединен со входом интегратора, дополнительно введены датчик угловых ускорений, датчик угловых скоростей, функциональный преобразователь, электронная картографическая навигационная информационная система, при этом выход датчика угловых ускорений и датчика угловых скоростей соединены со входами функционального преобразователя, который другими своими входами соединен с выходами соответственно датчика курсового угла, приемоиндикатора спутниковой навигационной системы, судового измерителя скорости, функциональный преобразователь своим входом-выходом соединен с входом-выходом электронной модели движения судна, другим входом-выходом соединен с входом-выходом рулевого привода и еще одним выходом соединен с входом электронной картографической навигационной информационной системы, которая другими входами соединена с соответствующими выходами рулевого привода, электронной модели движения судна, судового измерителя скорости и судового эхолота.
Предлагаемый способ управления, как и в прототипе [3] использует:
Датчик (задатчик) курсового угла ϕзд, приемник спутниковой навигационной системы (СНС), рулевой привод, электронную модель движения судна, рулевой привод и регулятор-сумматор.
В датчике курсового угла сформирован сигнал ϕзд=f(t), который поступает на вход регулятора-сумматора, на второй вход которого поступает сигнал оценки угла курса  . Сигнал оценки
. Сигнал оценки  формируется на выходе электронной модели движения судна. Для формирования оценки сигнала угла курса на вход электронной модели движения судна вводится сигнал угла перекладки руля δ от датчика рулевого привода и сигнал невязки
формируется на выходе электронной модели движения судна. Для формирования оценки сигнала угла курса на вход электронной модели движения судна вводится сигнал угла перекладки руля δ от датчика рулевого привода и сигнал невязки  (К вычисляется с использованием метода Калмановской фильтрации, формируемой с использованием оценки сигнала угла курса
(К вычисляется с использованием метода Калмановской фильтрации, формируемой с использованием оценки сигнала угла курса  - с выхода электронной модели движения судна и сигнала угла курса ϕ - с выхода приемника СНС). Таким образом на выходе регулятора-сумматора формируется сигнал заданного значения угла перекладки руля δзд.:
- с выхода электронной модели движения судна и сигнала угла курса ϕ - с выхода приемника СНС). Таким образом на выходе регулятора-сумматора формируется сигнал заданного значения угла перекладки руля δзд.:

где ϕзд - заданный курс с датчика курсового угла,
 - сигнал оценки угла курса с выхода электронной модели движения судна,
- сигнал оценки угла курса с выхода электронной модели движения судна,
δзд - сигнал с выхода регулятора-сумматора,
 - сигнал невязки (эта невязка вводится также на вход электронной модели движения судна для формирования на выходе оценка угла курса
- сигнал невязки (эта невязка вводится также на вход электронной модели движения судна для формирования на выходе оценка угла курса  ),
),
 - сигнал дифференцирования формируется в регуляторе-сумматоре.
- сигнал дифференцирования формируется в регуляторе-сумматоре.
Для повышения точности автоматического управления движением судна используют интегратор, на вход которого вводится сигнал невязки  .
.
Сигнал , сформированный на выходе интегратора, вводят на вход регулятора-сумматора. (Ки формируется по методу Калмана.)
При этом закон управления рулевым приводом (1) изменится и примет вид (1а):

Сигнал δзд с выхода регулятора-сумматора (в соответствии с зависимостью (1а)) вводят на вход рулевого привода.
Сформированное автоматическое управление движением (1а) позволит исключить смещение (ошибку) при движении по заданному углу курса ϕзд (в случае наличия медленно меняющихся внешних возмущений).
При реализации предложенного в прототипе [3] варианта системы автоматического управления движением судна устраняются ошибки в автоматическом управлении движением по заданному курсу ϕзд при появлении медленно меняющихся внешних возмущений вида: 
где ξ, ξм - случайный сигнал, характеризующий изменение в медленно меняющемся входном возмущении.
Ошибка в управлении движением судна от воздействия медленно меняющихся возмущающих сил Р и моментов М вида (2) устраняется благодаря введению в закон управления (1) дополнительного сигнала вида с выхода интегратора 3 (т.е. переходу от закона (1) к закону управления (1а)).
Однако ошибка в управлении движением судна от воздействия медленно меняющихся возмущающих сил Р и моментов М вида (2) будет накапливаться особенно при частых перекладках руля, неизбежных при плавании в стесненных обстоятельствах плавания из-за инерционности процесса управления судном.
В отличие от прототипа [3] в предлагаемом техническом решении для оценки угловой скорости судна на вход модели угловой скорости судна поступает сигнал перекладки руля в виде разности между текущим значением угла перекладки руля и балансировочным значением угла перекладки руля, формируемый в логическом блоке, а на выходе модели угловой скорости судна вырабатывается составляющая угловой скорости судна, зависящая только от управляющего воздействия.
В случае сильного морского волнения предлагается вместо зашумленного полного сигнала угловой скорости судна использовать только составляющую сигнала угловой скорости судна от управляющего воздействия. Такая оценка угловой скорости судна может быть получена, если на вход модели угловой скорости судна будет поступать сигнал перекладки руля, а на выходе вырабатывается составляющая угловой скорости судна только от управляющего воздействия.
При этом при построении модели угловой скорости судна нет необходимости использовать полные уравнения движения судна, а можно принять лишь упрощенную математическую модель углового движения судна (Шлейер Г.Э. Прогнозирование курса судна. - Судостроение, 1976, №12):
 , где
, где
Т - наибольшая постоянная времени судна, kσ - перестраиваемый коэффициент управления, ω - угловая скорость.
В процессе эксплуатации допустимо подстраивать только Т.
В случае применения модели угловой скорости судна при прогнозировании курса судна, например, при проходе узкостей или при плавании в стесненных обстоятельствах, при переходе на ручное управление судном значение курса может быть вычислено по формуле:
 , где
, где  - оценка приращения курса с момента начала одерживания судна до выхода на желаемый курс;
- оценка приращения курса с момента начала одерживания судна до выхода на желаемый курс;  - оценка угловой скорости судна от управляющего воздействия, k1 - коэффициент, в общем виде зависящий от динамических характеристик судна (скорости судна, загрузки), φ - фазовая координата).
- оценка угловой скорости судна от управляющего воздействия, k1 - коэффициент, в общем виде зависящий от динамических характеристик судна (скорости судна, загрузки), φ - фазовая координата).
Для вычисления предсказанного значения курса наличие инфранизкочастотных возмущающих моментов (составляющая от внешнего волнения на море, несбалансированность тяги нескольких гребных винтов, асимметричная загрузка судна и др.) приводит к неравенству нулю балансировочного значения угла перекладки руля σбал.
Это, в свою очередь, будет приводить к методической ошибке при вычислении предсказанного значения курса судна. Поэтому при вычислениях используется не текущее значение угла перекладки руля σ, а смещенное значение: σсм=σ-σбал.
Балансировочное значение угла перекладки руля σбал определяется как математическое ожидание от величины текущего угла перекладки руля σбал=М(σ).
Система для реализации известного способа содержит 1 - датчик курсового угла φзд, 2 - приемник спутниковой навигационной системы (СНС), 3 - интегратор, 4 - регулятор-сумматор, 5 - рулевой привод, 6 - электронную модель движения судна, 7 - объект управления - судно, логический блок 8 (см. чертеж).
Реализовать рассматриваемую систему можно как с использованием цифровой элементной базы, так и аналоговой. При использовании аналоговой элементной базы можно применить усилители типа УД-6 и УД-8 (Блоки 1, 4, 7). Интегратор 3 выбирается с чувствительностью не ниже 0.03° курса. Блоки 2, 5 - это штатные (судовые) устройства. Рассмотрим работу системы автоматического управления движением судна.
В датчике курсового угла 1 сформирован сигнал ϕзд=f(t), который вводится на вход регулятора-сумматора 4, на второй вход которого поступает сигнал оценки текущего угла курса  . Сигнал оценки
. Сигнал оценки  вводится с выхода электронной модели движения судна 6. Для формирования оценки угла курса на вход электронной модели движения корабля 6 вводится сигнал угла перекладки руля δ от датчика рулевого привода 5 и сигнал невязки
вводится с выхода электронной модели движения судна 6. Для формирования оценки угла курса на вход электронной модели движения корабля 6 вводится сигнал угла перекладки руля δ от датчика рулевого привода 5 и сигнал невязки  (крутизна сигнала вычисляется с использованием метода Калмановской фильтрации, формируемой сигналом
(крутизна сигнала вычисляется с использованием метода Калмановской фильтрации, формируемой сигналом  с выхода электронной модели движения судна 6 и сигналом ϕ с выхода приемника СНС 2.
с выхода электронной модели движения судна 6 и сигналом ϕ с выхода приемника СНС 2.
При этом на выходе регулятора-сумматора 4 формируется сигнал заданного значения угла перекладки руля δзд:

где - оценка угла курса (с выхода электронной модели движения судна 6),
ϕзд - заданный угол курса (с выхода задатчика курса 1).
Закон (1) получил широкое распространение, однако при появлении внешних возмущений (волнение, ветер) движение судна осуществляется с ошибкой по курсу. Для компенсации воздействия на судно медленно меняющихся внешних возмущений в соответствии с предложенным способом закон (1) дополняется сигналом с выхода интеграла 3, на вход которого вводится сигнал невязки 
где ϕ - сигнал угла курса (поступающий с выхода приемника СНС 2), сигнал ϕ алгебраически суммируется с сигналом оценки угла курса  (вырабатываемой на выходе электронной модели движения судна 6) для формирования сигнала невязки
(вырабатываемой на выходе электронной модели движения судна 6) для формирования сигнала невязки  ,
,
 - сигнал, формируемый в блоке суммирования 4 (вводится в случае управления среднетоннажными судами),
- сигнал, формируемый в блоке суммирования 4 (вводится в случае управления среднетоннажными судами),  - сигнал, пропорциональный оценке возмущающего воздействия на судно по силе Р и моменту М.
- сигнал, пропорциональный оценке возмущающего воздействия на судно по силе Р и моменту М.
Сигнал  формируется в интеграторе 3, на вход которого вводится сигнал невязки
формируется в интеграторе 3, на вход которого вводится сигнал невязки  (сигнал ϕ - из приемника СНС 2 и сигнал
(сигнал ϕ - из приемника СНС 2 и сигнал  - из электронной модели движения судна 6, Ки вычисляется по методу Калмановской фильтрации). Сигнал δзд с выхода регулятора-сумматора 4 вводят на вход рулевого привода 5. При этом судно будет двигаться по курсу, равному заданному значению: ϕ=ϕзд без смещения по курсу при наличии медленно меняющихся внешних возмущений, что особенно важно при прохождении узкостей.
- из электронной модели движения судна 6, Ки вычисляется по методу Калмановской фильтрации). Сигнал δзд с выхода регулятора-сумматора 4 вводят на вход рулевого привода 5. При этом судно будет двигаться по курсу, равному заданному значению: ϕ=ϕзд без смещения по курсу при наличии медленно меняющихся внешних возмущений, что особенно важно при прохождении узкостей.
В случае сильного морского волнения предлагается вместо зашумленного полного сигнала угловой скорости судна использовать только составляющую сигнала угловой скорости судна от управляющего воздействия. Такая оценка угловой скорости судна может быть получена, если на вход модели угловой скорости судна будет поступать сигнал перекладки руля, а на выходе вырабатывается составляющая угловой скорости судна только от управляющего воздействия.
При этом, при построении модели угловой скорости судна нет необходимости использовать полные уравнения движения судна, а можно принять лишь упрощенную математическую модель углового движения судна (Шлейер Г.Э. Прогнозирование курса судна. - Судостроение, 1976, №12):
 , где
, где
Т - наибольшая постоянная времени судна, kσ - перестраиваемый коэффициент управления, ω - угловая скорость.
В процессе эксплуатации допустимо подстраивать только Т.
В случае применения модели угловой скорости судна при прогнозировании курса судна, например, при проходе узкостей или при плавании в стесненных обстоятельствах, при переходе на ручное управление судном значение курса может быть вычислено по формуле:
, где  - оценка приращения курса с момента начала одерживания судна до выхода на желаемый курс; - оценка угловой скорости судна от управляющего воздействия, k1 - коэффициент, в общем виде зависящий от динамических характеристик судна (скорости судна, загрузки), φ - фазовая координата).
- оценка приращения курса с момента начала одерживания судна до выхода на желаемый курс; - оценка угловой скорости судна от управляющего воздействия, k1 - коэффициент, в общем виде зависящий от динамических характеристик судна (скорости судна, загрузки), φ - фазовая координата).
Для вычисления предсказанного значения курса наличие инфранизкочастотных возмущающих моментов (составляющая от внешнего волнения на море, несбалансированность тяги нескольких гребных винтов, асимметричная загрузка судна и др.) приводит к неравенству нулю балансировочного значения угла перекладки руля σбал.
Это, в свою очередь, будет приводить к методической ошибке при вычислении предсказанного значения курса судна. Поэтому при вычислениях используется не текущее значение угла перекладки руля σ, а смещенное значение: σсм=σ-σбал.
Балансировочное значение угла перекладки руля σбал определяется как математическое ожидание от величины текущего угла перекладки руля σбал=М(σ).
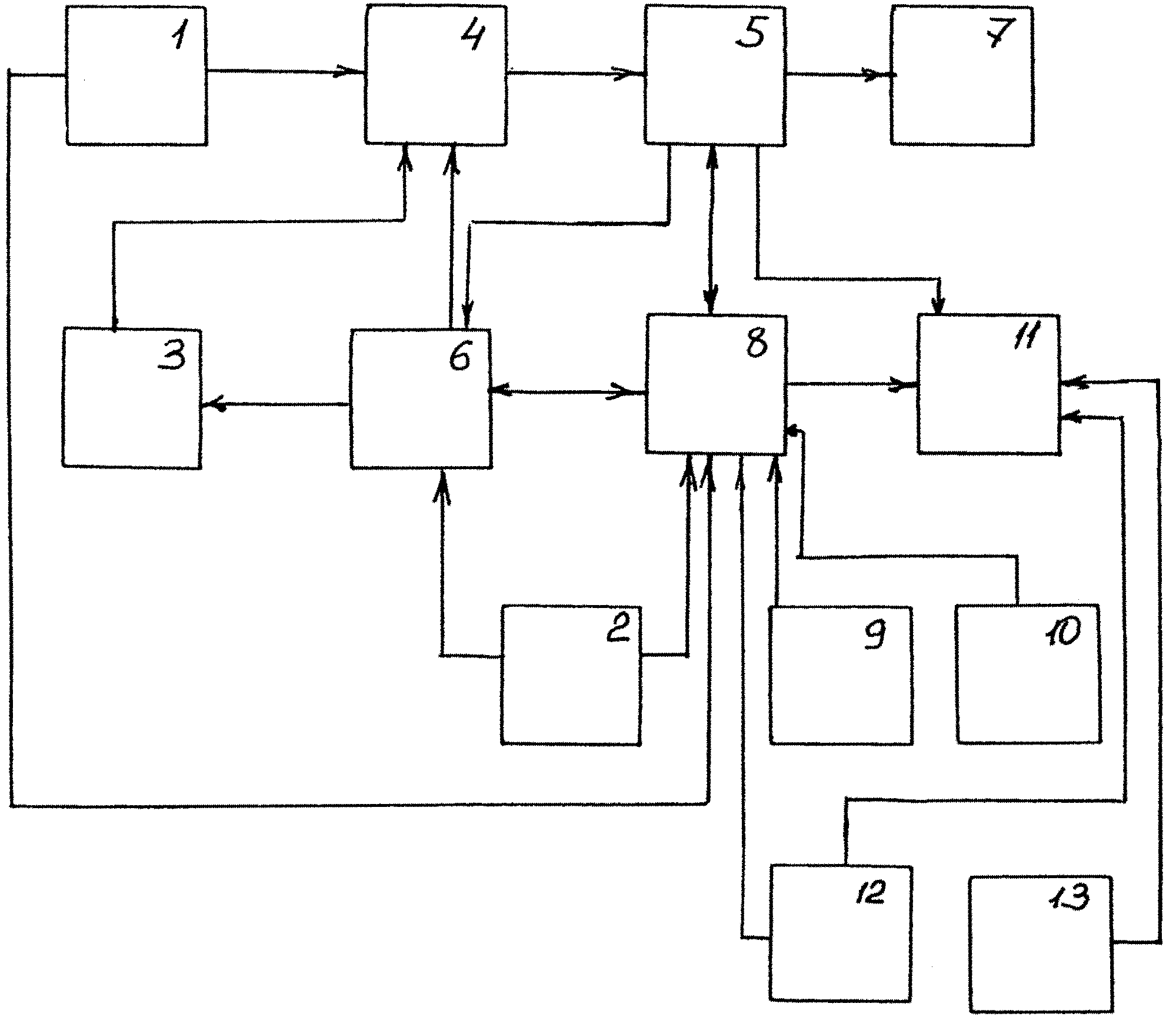
Система для реализации способа содержит (см. чертеж): датчик 1 курсового угла ϕзд, приемник 2 спутниковой навигационной системы (СНС), интегратор 3, регулятор-сумматор 4, рулевой привод 5, электронную модель 6 движения судна, объект управления - судно 7, функциональный преобразователь 8, датчик угловых ускорений 9, датчик угловых скоростей 10, электронную картографическую навигационную информационную систему 11, судовой измеритель скорости 12, судовой многолучевой эхолот 13.
Функциональный преобразователь 8 представляет собой модуль быстродействующих вычислительных средств с соответствующим программным обеспечением и логический блок.
Функциональный преобразователь 8 получает информацию от датчика 1 курсового угла ϕзд, приемника 2 спутниковой навигационной системы, рулевого привода 5, электронной модели 6 движения судна, датчика угловых ускорений 9, датчика угловых скоростей 10, судового измерителя скорости 12 о состоянии фазовых координат объекта управления 7 и исполнительных органов (рулевой привод 5). Вся эта информация поступает также на электронную модель 6 движения судна, которая включает модель объекта управления 7 и модели исполнительных устройств и используется в качестве начальных условий при каждом цикле изменения курсового угла.
В функциональном преобразователе 8 предусмотрен также режим прогнозирования, в котором модель объекта управления 7 и модели исполнительных устройств работают в одном и том же ускоренном масштабе времени. Периодизация решений осуществляется блоком логики.
Предсказанные значения фазовых координат в режиме прогноза поступают на электронную картографическую навигационную информационную систему 11, на которую также поступает информация от судового многолучевого эхолота 13, судового измерителя скорости 12.
Посредством электронной картографической навигационной информационной системы 11 осуществляется визуализация положения судна 7 относительно береговой черты, глубин, навигационных ориентиров и знаков при плавании в стесненных обстоятельствах. Наличие электронной картографической навигационной информационной системы 11 позволяет судоводителю наиболее эффективно использовать рулевое управление, с максимальной скоростью перекладывать руль и набирать угловую скорость судна 7 до тех пор, пока не установится предсказанное значение курса судна, соответствующее требуемому. В этот момент судоводитель должен задать обратную перекладку руля. Когда предсказанное значение курса начнет уменьшаться относительно заданного, прекращается одерживание судна. Руль при этом будет находится вблизи нуля (балансировочное значение). Далее осуществляется процесс стабилизации судна на заданном курсе. В режиме стабилизации и в момент приложения внешних воздействий на индикаторном табло ЭКНИС появится будущая величина рыскания, которой судно достигнет, если в данный момент начать отклонять руль с целью компенсации воздействий. Момент прекращения перекладки руля или изменения знака скорости перекладки судоводитель определяет по совпадения значений или отклонению предсказанного значения курса от заданного.
Аппаратурная реализация такого устройства может быть различной. В случае прогнозирования процесса управлении, который описывается нелинейной системой дифференциальных уравнений высокого порядка, используются устройства, работающие в ускоренном масштабе времени. Прогнозирующие устройства реализуют в виде функциональных преобразователей жесткой или переменной структуры. При наличии шумов и значительных внешних воздействий в алгоритме прогнозирующих устройств в качестве основной информации используются восстановленные фазовые координаты. Управление инерционным объектом с ограниченной эффективностью исполнительных органов является весьма сложной задачей из-за невозможности компенсировать даже небольшую задержку в момент начала одерживания судна при выходе на новый курс и опасностей, возникающих при этом.
Использование информации о будущем состоянии фазовых координат объекта управления позволяет повысить качество управления судном. Это важно, например, на супертанкерах, где эффект от воздействия руля проявляется только через десятки секунд. Промышленная реализация заявляемого технического решения трудностей не представляет, так как реализуется с использованием серийно выпускаемых технических средств навигации.
Источники информации
1. Патент RU 2248914, март 2005 г.
2. Патент RU №2223197, апрель 2004 г.
3. Патент RU №2492105 С1, 10.09.2013.



Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ активной борьбы с айсберговой опасностью и устройство для активной борьбы с айсберговой опасностью
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ активной борьбы с айсберговой опасностью и устройство для активной борьбы с айсберговой опасностью

