Результат интеллектуальной деятельности: СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕПРЕРЫВНЫМ РАСХОДОМ СЫПУЧЕГО МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Задача непрерывной управляемой подачи сыпучих материалов в технологические аппараты в качестве управляющего воздействия на параметры технологических процессов актуальна для целого ряда производств химической, металлургической, пищевой, строительной и других отраслей промышленности. Наиболее часто для ее решения применяют способ механического перемещения материала с помощью рабочих органов питающих и дозирующих устройств (ленты, лопастные колеса, шнеки, вибрирующие лотки и др.) [1, 2], надежность и метрологические характеристики которых в условиях контакта с сыпучими средами не соответствуют предъявляемым требованиям. Управление расходом сыпучих материалов по текущему значению веса становится неэффективным в условиях переменной влажности, вызывающей значительную погрешность. Существенным недостатком механических питателей и дозаторов для сыпучих материалов, реализующих данный способ, является их высокая стоимость, определяемая в большинстве случаев сложностью конструкции, габаритами и металлоемкостью. Один из аналогов заявляемого способа управления расходом сыпучего материала реализует регулятор расхода по патенту RU 2137173 [3]. Значение расхода сыпучего материалов задают путем ввода уставки, соответствующей силе давления потока сыпучего материала на силоизмерительное устройство в виде лотка, связанное с поворотным шибером, обеспечивающим периодическую подачу материала на лоток в заданном количестве. При заданной уставке шибер колеблется относительно положения, соответствующего заданному расходу сыпучего материала, и средний расход сыпучего материала, выносимого потоком воздуха, равен заданному значению. Надежность устройства снижена в силу наличия в нем подвижного элемента, контактирующего с потоком сыпучего материала. Кроме того, устройство в принципе не обеспечивает непрерывность расхода.
Эффективной альтернативой механическим системам могут стать пневматические питатели и дозаторы для управления расходом и количеством сыпучих материалов. Однако в большинство пневматических систем [4, 5] сыпучий материал подается теми же механическими средствами, которые и в этом случае должны обеспечивать заданное значение расхода материала. Известны способ и устройство объемного пневматического дозирования сыпучих материалов, лишенные перечисленных недостатков [6], однако в этом случае выдача материала осуществляется дозами постоянного объема, и для управления непрерывным потоком материала изобретение непосредственно применяться не может.
Наиболее близким к заявляемому является способ управления расходом, реализуемый при помощи дозатора сыпучих материалов по авт.свид. СССР №530184 [7]. Изобретение обеспечивает равномерность и непрерывность подачи заданного количества материала в потоке воздуха. К недостаткам устройства следует также отнести наличие в нем кинематических пар, работающих в потоке сыпучего материала. Механические подвижные элементы (пробковый кран, основной регулирующий клапан и обратный грузовой клапан) подвержены абразивному износу. Попадание мелкой фракции твердой фазы в зазоры между взаимно перемещающимися деталями может привести к нарушению нормального режима работы устройства вплоть до аварии. Кроме того, датчик давления расположен в верхней части смесительной камеры, что в принципе ограничивает возможный диапазон регулирования расхода размерами камеры, поскольку давление в этой зоне не равно по величине давлению, создающему перемещающую частицы материала силу, из-за потерь давления в слое материала, находящегося в камере. В дополнение к сказанному, следует отметить, что количество материала в смесительной камере изменяется в процессе работы, что приводит к снижению точности реализации управления.
Цель заявляемого способа управления расходом состоит в повышении надежности и точности, а также в увеличении диапазона непрерывного управления расходом сыпучего материала.
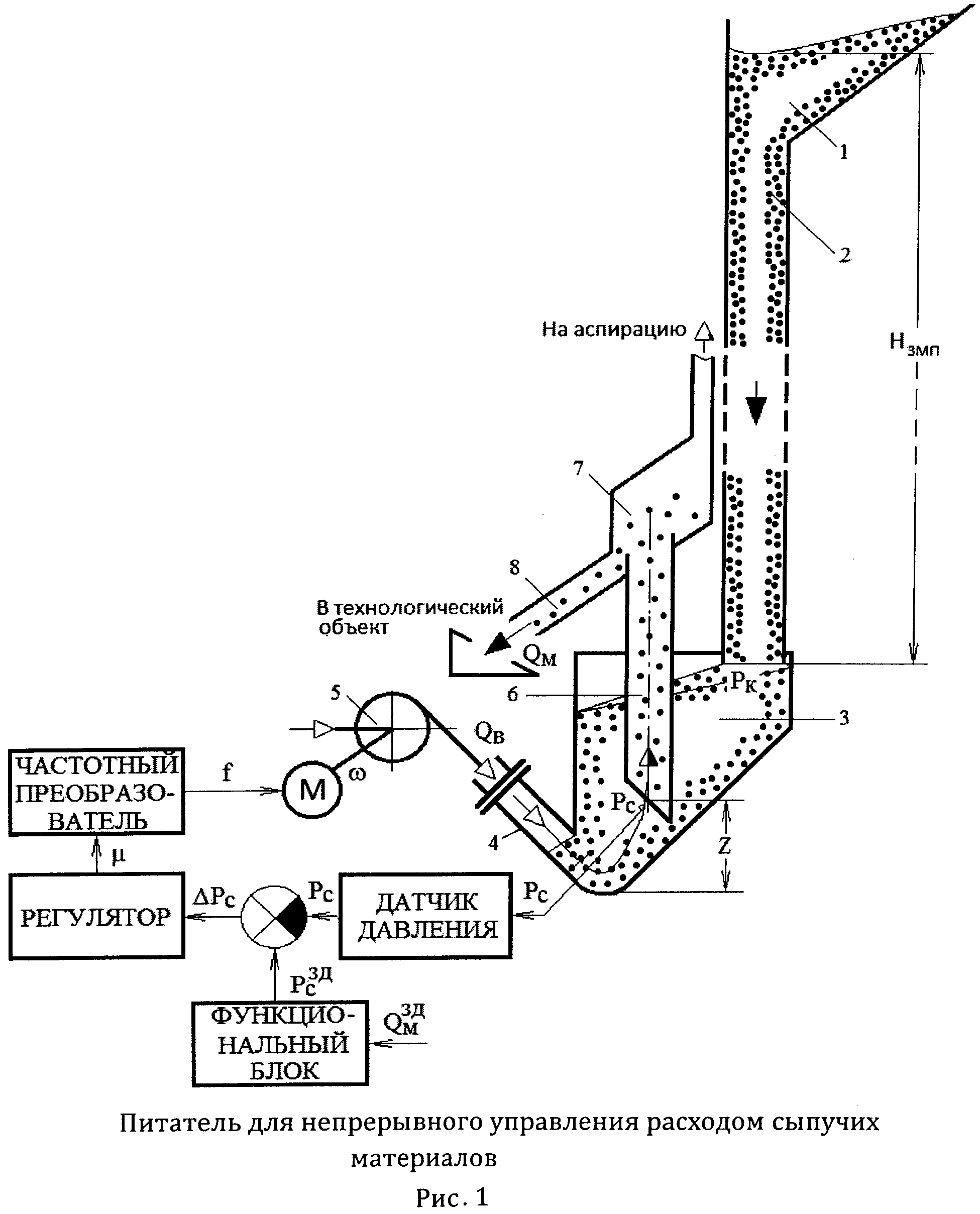
Заявляемый способ управления поясняется схемой автоматического питателя, представленной на рисунке 1.
Материал из загрузочного бункера 1 по напорной шахте 2 под действием силы тяжести поступает в смесительную камеру 3, где смешивается с газом, например, с воздухом, поступающим по трубопроводу 4 от воздуходувного агрегата 5. Под напором воздуха двухфазная смесь «газ - сыпучий материал» по транспортному трубопроводу 6 подается в расширительную камеру 7, где за счет резкого падения давления происходит разделение воздуха и твердой фазы. Запыленный воздух удаляется в аспирационную систему, а сыпучий материал по выпускному трубопроводу 8 поступает в технологический объект. Давление PC на входе в транспортный трубопровод контролируется датчиком текущего значения давления, выходной сигнал которого поступает на компаратор, где сравнивается с величиной задания  , поступающей от задатчика величины давления. Сигнал рассогласования в соответствии с заданным законом регулирования преобразуется в управляющий сигнал µ, величина которого определяет частоту выходного сигнала f частотного преобразователя, управляющего скоростью вращения ω привода воздуходувного агрегата 5.
, поступающей от задатчика величины давления. Сигнал рассогласования в соответствии с заданным законом регулирования преобразуется в управляющий сигнал µ, величина которого определяет частоту выходного сигнала f частотного преобразователя, управляющего скоростью вращения ω привода воздуходувного агрегата 5.
Реализация заявляемого способа управления возможна только при наличии:
1) зависимости величины давления PC от заданной величины расхода  сыпучего материала (расходной характеристики);
сыпучего материала (расходной характеристики);
2) зависимости, определяющей высоту напорной шахты, при которой обеспечивается непрерывная загрузка смесительной камеры в процессе выдачи материала.
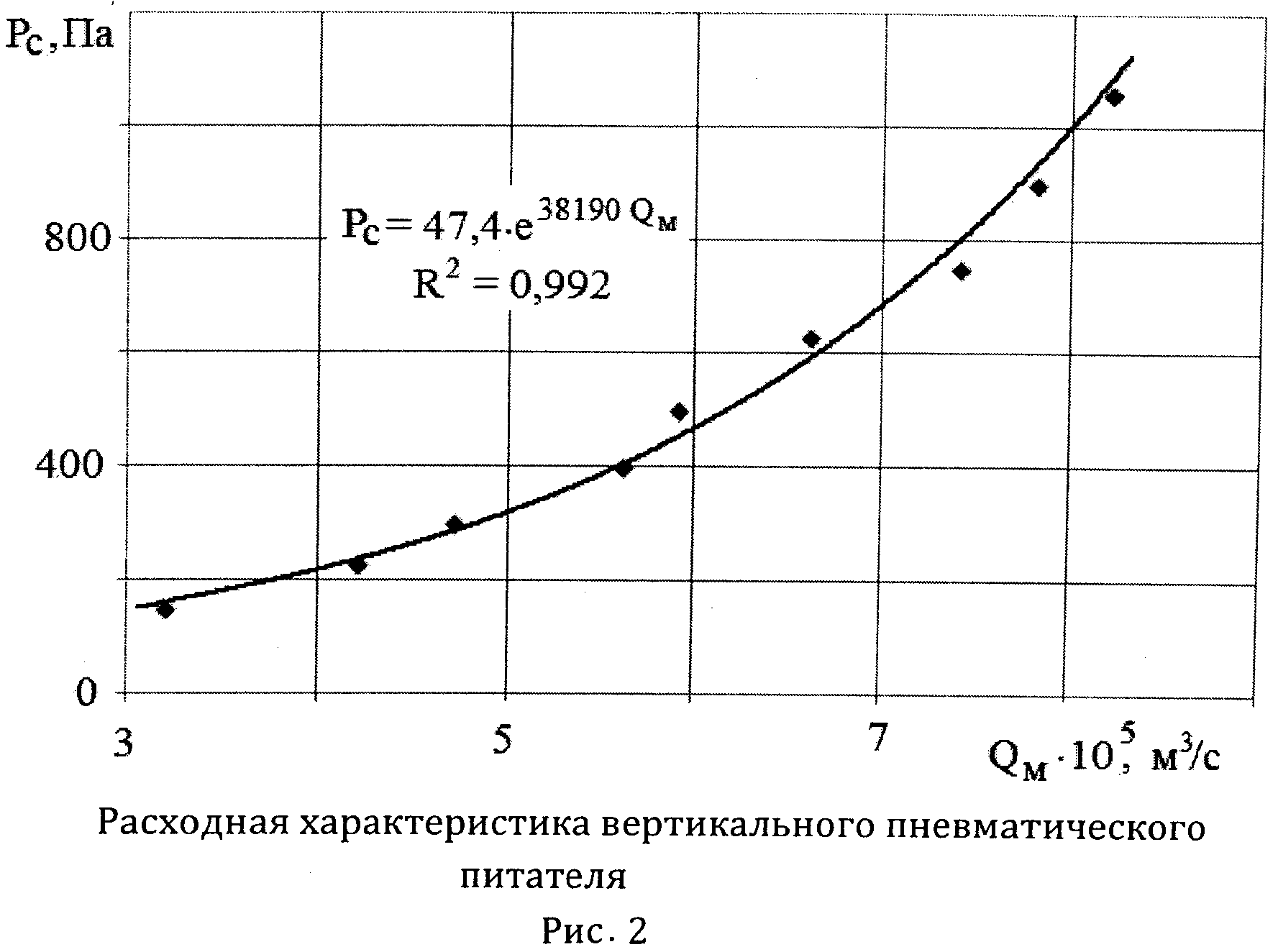
Следует отметить, что специфика данного способа управления не позволяет применить к нему известные из теории пневматического транспорта математические модели. Зависимость  получена в результате обработки представительного массива экспериментальных данных в соответствии с требованиями ГОСТ 14202-69. Эксперименты проводились на полупромышленной установке, основой которой является вертикальный пневматический питатель (ВПП) для сыпучего материала, реализующий заявляемый способ управления. На рисунке 2 приведен пример экспериментально определенной расходной характеристики ВПП для определения требуемой величины давления PC по заданному значению расхода сыпучего материала. В качестве последнего в данном случае использовалось сухое шлифованное пшено с диаметром частиц dM=(2±01)·10-3 м, и плотностью ρM=1100 кг/м3. Соотношение диаметров частицы и внутреннего диаметра транспортного трубопровода dM/dTP=1/10. Газ-носитель - воздух при нормальных условиях.
получена в результате обработки представительного массива экспериментальных данных в соответствии с требованиями ГОСТ 14202-69. Эксперименты проводились на полупромышленной установке, основой которой является вертикальный пневматический питатель (ВПП) для сыпучего материала, реализующий заявляемый способ управления. На рисунке 2 приведен пример экспериментально определенной расходной характеристики ВПП для определения требуемой величины давления PC по заданному значению расхода сыпучего материала. В качестве последнего в данном случае использовалось сухое шлифованное пшено с диаметром частиц dM=(2±01)·10-3 м, и плотностью ρM=1100 кг/м3. Соотношение диаметров частицы и внутреннего диаметра транспортного трубопровода dM/dTP=1/10. Газ-носитель - воздух при нормальных условиях.
Аппроксимирующее уравнение для расходной характеристики имеет вид

где А и В - эмпирические коэффициенты, значения которых определяются параметрами твердой фазы, воздуха и конструктивными параметрами питателя.
Высота напорной шахты HНШ определяется по формуле

где PК - давление в смесительной камере на выходе из напорной шахты;
ε - порозность столба сыпучего материала в напорной шахте;
g - ускорение свободного падения;
ρM - плотность частиц материала.
Применение данного выражения основано на том, что материал в напорной шахте насыщен воздухом и его порозность отлична от порозности свободно насыпанного материала. Выполнение условия (2) обеспечивает возможность непрерывной загрузки смесительной камеры без прекращения выдачи материала.
Основные преимущества предлагаемого изобретения по сравнению с прототипом состоят в следующем:
- обеспечивается непрерывное управление расходом сыпучего материала в широком диапазоне, а также повышенная точность преобразования управляющего сигнала в изменение расхода за счет выбора оптимальной точки отбора давления;
- отсутствуют кинематические пары, работающие в контакте с сыпучим материалом, в силу чего повышена надежность функционирования питателя;
- обеспечивается непрерывная загрузка питателя материалом в процессе работы.
Источники информации
1. Видинеев, Ю.Д. Автоматическое непрерывное дозирование сыпучих материалов. / Ю.Д. Видинеев. - М.: Энергия. - 1974. - 120 с.
2. Першина С.В. Весовое дозирование зернистых материалов / С.В. Першина, А.В. Каталымов, В.Г. Однолько, В.Ф. Першин. - М.: Машиностроение, 2009. - 260 с.
3. Регулятор расхода сыпучих материалов. Патент RU 2137173.
4. Каталымов А.В. Дозирование сыпучих и вязких материалов / А.В. Каталымов, В.А. Любартович. - Л.: Химия, 1990. - 240 с.
5. М.П. Калинушкин. Пневмотранспортное оборудование: Справочник / Под общ. ред. М.П. Калинушкина. - Л.: Машиностроение, 1986.
6. Способ объемного дозирования сыпучих материалов и устройство для его осуществления. Патент RU 2503932 C2
7. Дозатор сыпучих материалов. АС СССР 580184.



Способ измерения температуры внутри вещества или живого организма
Микробиореактор и способ его эксплуатации
Способ объемного дозирования сыпучих материалов и устройство для его осуществления
Способ получения каталитического покрытия для очистки газов
Способ измерения термодинамической температуры
Способ управления процессом модифицирования поверхности полимерных материалов
Способ переработки жидких нефтешламов в гидратированное топливо
Способ определения намагниченности насыщения магнитной жидкости
Огнеупорная бесцементная бетонная масса
Термостойкий фоторезист
Способ измерения температуры внутри вещества или живого организма
Микробиореактор и способ его эксплуатации
Состав композиции и покрытие из нее
Способ термохимической переработки нефтяных шламов или кислых гудронов в смесях с твердым природным топливом для получения жидких продуктов и твердых остатков
Способ объемного дозирования сыпучих материалов и устройство для его осуществления
Способ получения каталитического покрытия для очистки газов
Способ измерения термодинамической температуры
Способ управления процессом модифицирования поверхности полимерных материалов
Способ переработки жидких нефтешламов в гидратированное топливо
Способ определения намагниченности насыщения магнитной жидкости

