Результат интеллектуальной деятельности: СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ДО ШУМЯЩЕГО ОБЪЕКТА
Вид РИД
Изобретение
Изобретение относится к области гидроакустики и может быть использовано при разработке систем определения координат для гидроакустических комплексов.
Известны пассивные методы определения дистанции по составу спектра принимаемого сигнала (Спицин Е.И., Проскурякова Т.В. Способ наименьших квадратов в спектральном методе определения дистанции при однолучевом приеме // Вопросы кораблестроения. Сер. Акустика. ЦНИИ «Румб», 1977 г., Вып.8; Исак В.А. Измерение дистанции пассивными методами // Морской сборник, 1987 г., №5, стр.68-70; Демиденко В.А. Частотный метод оценки расстояния и его эффективность при работе ГАС в пассивном режиме // Гидроакустика, 1993 г., Вып 1, стр.3-16) Для оценки дистанции спектральные методы используют в качестве физической основы зависимость степени затухания интенсивности звука от частоты при распространении в водной среде.
Известен способ, в котором в качестве параметра для оценки дистанции используют закон спада (наклон) спектра сигнала в точке приема (Демиденко В.А., Перельмутер Ю.С. Спектральный метод оценки дистанции // Гидроакустика,2006 г.,Вып.6, стр.51-59).
Этот способ предполагает сопровождение объекта в режиме шумопеленгования, преобразование принятого аналогового сигнала в цифровой, цифровой спектральный анализ сигнала в широкой полосе частот, измерение спада спектра сигнала в точке приема, определение дистанции до объекта по результатам этого измерения с учетом априорных знаний параметров формы спектра сигнала, излучаемого объектом, и величины пространственного затухания в морской среде. Этот способ наиболее близок к предлагаемому изобретению и поэтому выбран в качестве прототипа.
При работе в реальных условиях границы спектра при распространении размываются случайным образом из-за влияния мешающего судоходства и собственного шумоизлучения носителя. В этой ситуации неизвестно, что сказывается на изменении закона спада спектра: внешняя среда, собственное шумоизлучение при движении антенны, наличие нескольких целей на одном направлении или процедура нормирования и центрирования. Процедуры нормирования и центрирования, принятые при цифровой обработке для формирования единого массива данных, используют оценки уровня помехи, действующие на момент измерения. Если процесс на входе нормальный и стационарный, то это не оказывает существенного влияния на результат измерения спектра во времени. В нашей ситуации уровень помехи на входе меняется случайным образом, поэтому результат спектрального анализа формируется в зависимости от уровня помехи на входе. Все это приводит к ошибочной и недостоверной оценке дистанции.
Таким образом, недостатком способа прототипа, как и других приведенных выше способов, является недостоверность оценки дистанции виду сложности оценки границ спектра, принадлежащего сигналу шумоизлучения.
Техническим результатом изобретения является повышение достоверности определения оценки дистанции до шумящего в море объекта и снижение времени на получении оценки дистанции.
Указанный технический результат достигается тем, что в известный способ, содержащий прием гидроакустического шумового сигнала цели гидроакустической антенной, преобразование принятого аналогового сигнала в цифровой, сопровождение объекта в режиме шумопеленгования, спектральный анализ гидроакустического шумового сигнала цели в широкой полосе частот, определение дистанции до цели, дополнительно введены новые операции, а именно: прием гидроакустического шумового сигнала производят половинами гидроакустической антенны, измеряют взаимный спектр между гидроакустическими шумовыми сигналами, принятыми половинами гидроакустической антенны; классифицируют объект, измеряют автокорреляционную функцию (АКФ) этого взаимного спектра; измеряют несущую частоту автокорреляционной функции Fизм, измеряют разность между измеренной несущей частотой и Fэталон эталонной несущей частотой автокорреляционной функции сигнала шумоизлучения объекта, полученной на малой известной дистанции (Fэталон-Fизм), а дистанцию до объекта определяют по формуле: Д=(Fэталон-Fизм)/K, где K - коэффициент пропорциональности, который вычисляют как отношение изменения несущей частоты автокорреляционной функции на единицу расстояния при определении эталонной частоты объекта принятого класса.
Сущность предлагаемого изобретения заключается в следующем.
Известно соотношение, которое определяет давление в точке приема (А.П. Евтютов, В.Б. Митько. Примеры инженерных расчетов в гидроакустике. Л.: Судостроение, 1981 г., стр.106).
 ,
,
где Р0 - приведенная шумность принятого гидроакустического шумового сигнала цели объекта шумоизлучения;
r - расстояние до объекта шумоизлучения;
Δf - полоса принятого гидроакустического шумового сигнала объекта шумоизлучения,
 - закон спада спектральной плотности принятого гидроакустического шумового сигнала объекта шумоизлучения, где f01 - эталонная частота, равная 1 кГц; fc - частота принятого гидроакустического шумового сигнала объекта шумоизлучения; n - показатель спада спектральной плотности;
- закон спада спектральной плотности принятого гидроакустического шумового сигнала объекта шумоизлучения, где f01 - эталонная частота, равная 1 кГц; fc - частота принятого гидроакустического шумового сигнала объекта шумоизлучения; n - показатель спада спектральной плотности;
β - коэффициент затухания при распространении, β=0.036f3/2.
В зависимости от вида спада спектра и от класса объекта значения коэффициента n могут изменяться от -к до +к. Если спектр спадает с ростом частоты, то к>0. Если спектр растет с ростом частоты, то к<0. Если к=0, то спектр равномерный. В зависимости от дистанции границы спектра могут изменяться. При этом средняя частота спектра шумоизлучения принятого гидроакустического шумового сигнала объекта определяется верхней и нижней границами принятого спектра и характером его спада в этих границах. Если характер спектра спадающий и K>0, то высокочастотные составляющие исходного спектра шумоизлучения при сферическом расширении затухают быстрее низкочастотных и поэтому верхняя частота границы спектра шумоизлучения принятого гидроакустического шумового сигнала объекта при распространении затухает быстрее, чем нижняя граничная частота, что приводит к изменению средней частоты принятого спектра. Таким образом, средняя частота принятого спектра гидроакустического шумового сигнала объекта будет зависеть от сферического расширения фронта волны r2 и от частотного затухания 10-0.1β·r, которое также зависит от дистанции. (B.C. Бурдик. Анализ гидроакустических систем. Л.: Судостроение, 1988 г., стр.111-133).
Если сигнал шумоизлучения принимается двумя половинами одной антенны, то для сигналов X1(t) и X2(t), можно записать:
 и
и
 , где
, где  - взаимный энергетический спектр шумоизлучения входных процессов, принятых сигналов двумя половинами антенны. Полученный взаимный энергетический спектр можно подвергнуть еще раз преобразованию Фурье, тогда в результате будет получена автокорреляционная функция или вторичный спектр.
- взаимный энергетический спектр шумоизлучения входных процессов, принятых сигналов двумя половинами антенны. Полученный взаимный энергетический спектр можно подвергнуть еще раз преобразованию Фурье, тогда в результате будет получена автокорреляционная функция или вторичный спектр.

где ωв - верхняя граничная частота принятого спектра шумоизлучения;
ωн - нижняя граничная частота принятого спектра шумоизлучения. (Дж. Бендат, А. Пирсол. Применения корреляционного и спектрального анализа. Пер. с англ. М.: Мир, 1983, стр.71).
Аргумент функции  определяет несущую частоту автокорреляционной функции, которая является средней частотой спектра принятого сигнала шумоизлучения и соответствует конкретной дистанции. Кроме того, эти частоты когерентны, т.е. связаны определенными фазовыми соотношениями с объектом шумоизлучения и принадлежат только этому конкретному объекту. Затухание верхней частоты спектра шумоизлучения, связанное с распространением, будет сказываться именно на этом спектре, и именно этот спектр будет искажаться при распространении. Поэтому несущая автокорреляционной функции определяет среднюю частоту принятого процесса шумоизлучения именно этого объекта, и она не зависит от мешающего действия помехи, поскольку случайная и широкополосная помеха, действующая в точке приема, не когерентна и ее составляющие не имеют фазовых связей.
определяет несущую частоту автокорреляционной функции, которая является средней частотой спектра принятого сигнала шумоизлучения и соответствует конкретной дистанции. Кроме того, эти частоты когерентны, т.е. связаны определенными фазовыми соотношениями с объектом шумоизлучения и принадлежат только этому конкретному объекту. Затухание верхней частоты спектра шумоизлучения, связанное с распространением, будет сказываться именно на этом спектре, и именно этот спектр будет искажаться при распространении. Поэтому несущая автокорреляционной функции определяет среднюю частоту принятого процесса шумоизлучения именно этого объекта, и она не зависит от мешающего действия помехи, поскольку случайная и широкополосная помеха, действующая в точке приема, не когерентна и ее составляющие не имеют фазовых связей.
Сравнивая измеренное значение несущей частоты с эталонной частотой, которая определяется исходной полосой шумоизлучения объекта на малой дистанции, Fэталон-Fизм, можно вынести решение о дистанции до объекта известного класса, который характеризуется своим видом спектра. Для этого необходимо измерить эталонную несущую частоту автокорреляционной функции на малой дистанции (например 1 км), несущую частоту автокорреляционной функции на большой дистанции (например 100 км) и определить калибровочный коэффициент К, который характеризуется тем, как изменяется ширина полосы сигнала шумоизлучения известного класса и, соответственно, средняя частота принятого спектра шумоизлучения от дистанции. Предположим, что на дистанции 1 км, спектр принятого шумоизлучения находится в диапазоне от 0,5 кГц до 5 кГц и принятая средняя частота сигнала (несущая частота автокорреляционной функции) равна 2750 Гц. На дистанции 100 км полоса принятого сигнала находится в диапазоне от 0,5 кГц до 1,5 кГц, а средняя частота (несущая частота автокорреляционной функции) равна 1000 Гц. Таким образом, коэффициент K=1750 Гц/100 или 17,5 Гц на 1 км. Если в процессе последующих измерений будет получена средняя частота принятого сигнала (несущая частота автокорреляционной функции), равная 1550 Гц, то дистанция будет равна (2750-1550)47,5=71,4 км.
Таким образом, измеряя отличие измеренного значения несущей частоты автокорреляционной функции принятого спектра шумоизлучения объекта известного класса от эталонного, можно определить дистанцию до объекта шумоизлучения. Достоинство этого способа заключается в том, что нет необходимости измерять верхнюю частоту спектра, нижнюю частоту спектра принятого сигнала шумоизлучения объекта на фоне помехи в точке приема, потом определять среднюю частоту. Средняя частота определяется автоматически как несущая частота автокорреляционной функции.
На чертеже приведена блок-схема устройства, реализующая предлагаемый способ. Антенна 1 двусторонней связью через блок 2 предварительной обработки и формирования характеристик направленности соединена с блоком 3 БПФ измерения взаимного спектра и классификации. Блок 4 вычисления автокорреляционной функции через блок 5 БПФ измерения несущей частоты заполнения автокорреляционной функции соединен с блоком 8 измерения разности между измеренной несущей частотой автокорреляционной функции и эталонной частотой, а блок 7 определения дистанции до измеренного объекта шумоизлучения соединен с индикатором 6. Блок 9 эталонных исходных данных соединен со вторым входом блока 8, а второй выход блока 5 измерения несущей частоты соединен со вторым входом индикатора 6.
Предложенный способ целесообразно проиллюстрировать на примере работы реализующего его устройства, приведенного на чертеже.
Шумовой сигнал принимается половинами антенны 1, передается в блок 2, в котором происходит предварительная обработка принятых сигналов каждой из половин антенны, преобразование аналогового сигнала в цифровой вид и формирование пространственного канала характеристики направленности. С выхода блока 2 сигнал шумоизлучения поступает в блок 3 БПФ, где измеряется взаимный спектр принятого шумового сигнала двумя половинами антенны без нормирования и центрирования и производится классификация объекта по спектральным признакам, которые передаются в блок 4 определения автокорреляционной функции. Измерение спектра и определение автокорреляционной функции является известными операциями, которые используются в современных цифровых процессорах для обработки сигналов в реальном масштабе времени (Дж. Бендат, А. Пирсол. Применения корреляционного и спектрального анализа. Пер. с англ. М.: Мир, 1983, стр.71). Классификация с использованием спектральных признаков является известной операцией и достаточно подробно изложена в книге Л.Л. Мясников, Е.Н. Мясников. Автоматическое распознавание звуковых образов. Л.: Энергия, 1970 г. Антенна, приемное устройство, предварительная обработка принятых сигналов и формирование пространственного канала характеристики направленности являются известными устройствами, которые достаточно подробно рассмотрены в книге B.C. Бурдик. Анализ гидроакустических систем. Судостроение, 1988 г., стр.347. Блоки 5, 7, 8, 9, могут быть реализованы в цифровых процессорах с использованием стандартных программ или процедур программирования вычислительных систем. Принципы цифрового преобразование и обработки достаточно подробно приведены в работе («Применение цифровой обработки сигналов» п/р Оппенгейма. М.: Мир, 1980 г., стр.389-436) При использовании цифровой техники в качестве спектрального анализа применяют процедуры быстрого преобразования Фурье (БПФ), которые обеспечивают выделение и измерение энергетического спектра шумового электрического процесса.
(Применение цифровой обработки сигналов. М.: Мир, 1980 г., стр.296) В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также измерение спектров сигнала шумоизлучения, автокорреляционную обработку и процедуры анализа спектров. Вопросы реализации спецпроцессоров достаточно подробно рассмотрены в книге Ю.А.Корякин, С.А.Смирнов, Г.В.Яковлев «Корабельная гидроакустическая техника» Санкт-Петербург «Наука»2004 г. стр.281. Измеренная оценка дистанции отображается на дисплее индикатора 6, куда поступает и сам вид несущей автокорреляционной функции. Вычисление значения несущей частоты автокорреляционной функции не вызывает существенных затруднений и может производиться последовательно с вычислениями спектральных и корреляционных оценок в процессе обработки сигналов обнаружения и измерения параметров, что существенно сокращает время получения оценки дистанции. Можно проградуировать шкалу дистанции в значениях частоты несущей автокорреляционной функции и отображать оценку дистанции в процессе работы в автоматическом режиме, что практически исключено в прототипе.
Способ измерения дистанции до шумящего объекта, содержащий прием гидроакустического шумового сигнала цели гидроакустической антенной, преобразование принятого аналогового сигнала в цифровой, сопровождение объекта в режиме шумопеленгования, спектральный анализ гидроакустического шумового сигнала цели в широкой полосе частот, определение дистанции до цели, отличающийся тем, что прием гидроакустического шумового сигнала производят половинами гидроакустической антенны, измеряют взаимный спектр между гидроакустическими шумовыми сигналами, принятыми половинами гидроакустической антенны; классифицируют объект, измеряют автокорреляционную функцию (АКФ) этого взаимного спектра; измеряют несущую частоту автокорреляционной функции F, измеряют разность между измеренной несущей частотой и эталонной несущей частотой автокорреляционной функции сигнала шумоизлучения объекта F, полученной на малой известной дистанции (F-F), а дистанцию до объекта определяют по формуле Д=(F-F)/K, где K - коэффициент пропорциональности, который вычисляют как отношение изменения несущей частоты автокорреляционной функции на единицу расстояния при определении эталонной частоты объекта принятого класса.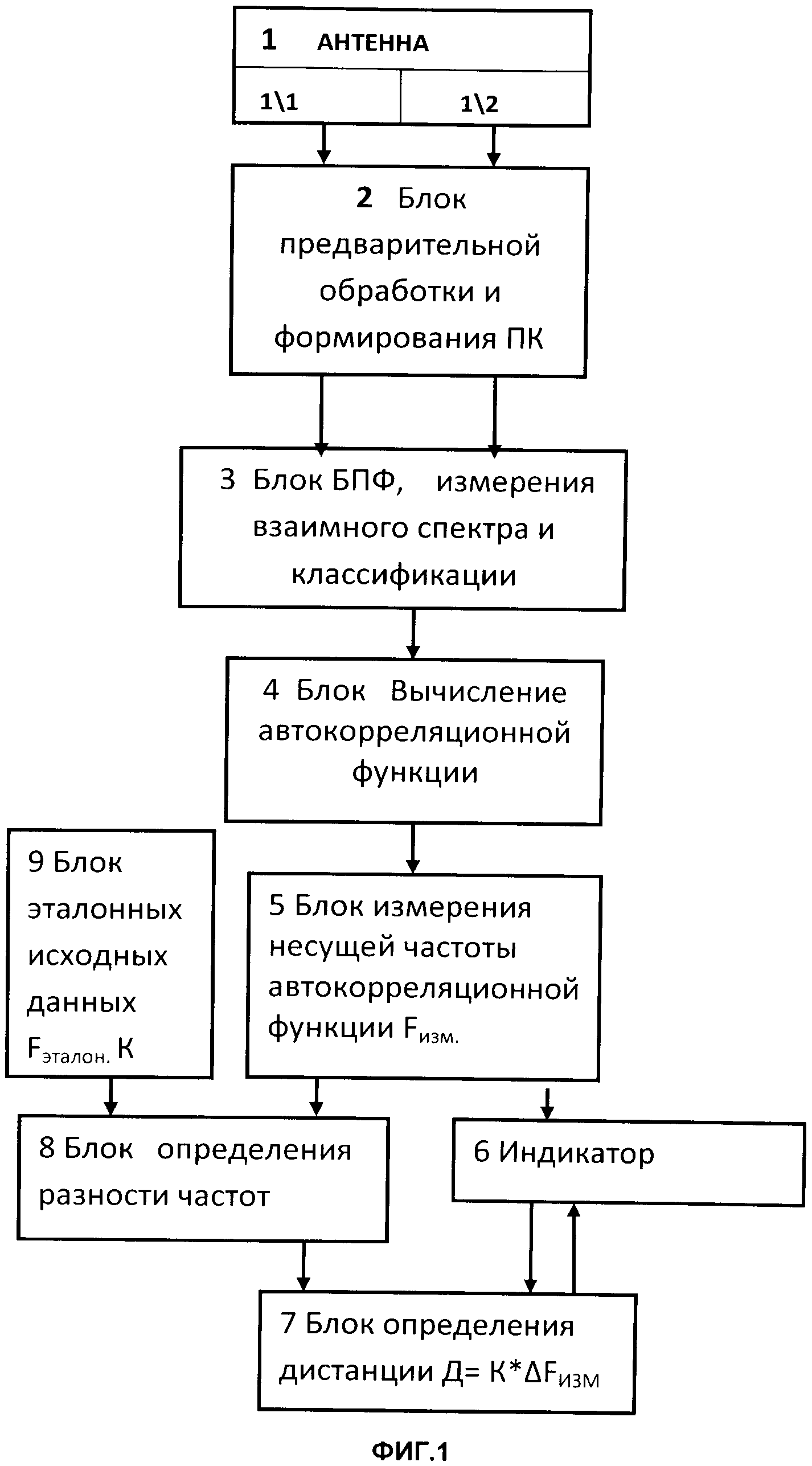
Способ определения скорости звука
Способ измерения гидролокатором параметров вытекающего газа из трубы подводного газопровода
Способ определения маневра шумящего объекта
Способ обнаружения локального объекта на фоне распределенной помехи
Способ классификации эхо-сигнала гидролокатора
Способ определения скорости звука
Способ измерения гидролокатором параметров вытекающего газа из трубы подводного газопровода
Способ определения маневра шумящего объекта
Способ обнаружения локального объекта на фоне распределенной помехи
Гидроакустический способ управления торпедой
Гидролокационный способ классификации подводных объектов в контролируемой акватории
Способ определения параметров цели гидролокатором
Способ определения скорости звука гидролокатором по трассе распространения сигнала до цели
Активный гидролокатор
Способ обработки гидролокационной информации

