Результат интеллектуальной деятельности: Способ определения скорости звука гидролокатором по трассе распространения сигнала до цели
Вид РИД
Изобретение
Настоящее изобретение относится к области гидроакустики и предназначено для измерения скорости звука гидролокатором по трассе распространения.
Все измерения в гидроакустике производятся с использованием оценки скорости звука. (В.Н. Матвиенко, Ю.Ф. Тарасюк «Дальность действия гидроакустических средств». - Л.: Судостроение. 1981 г.).
Существуют прямые и косвенные методы определения скорости распространения звука в воде. Косвенные методы предполагают предварительное измерение температуры воды и солености воды и дальнейший расчет по известным номограммам скорости звука (В.А. Комляков «Корабельные средства измерения скорости звука и моделирования акустических полей в океане». СПб.: «Наука», 2003 г., стр. 50-87).
Эти способы позволяют определять скорость звука по конкретным измерениям температуры и солености, которые могут быть произведены путем забора проб воды и проведения химического анализа при процедуре измерения температуры. Измерение производится с использованием специальных судов и стандартных океанографических измерительных средств, в которые входят глубоководный опрокидывающийся термометр, термометр-глубомер, батитермограф, а также комплексные гидрологические зонды. Количество параметров измеряемых зондом и измерительных каналов зависит от выполняемых им конкретных задач. Информация об измеренных параметрах передается в бортовые приборы по кабель-тросу. Недостатком этого метода является необходимость специализированного судна и длительная процедура измерения для получения оценки скорости звука по трассе.
Существуют прямые методы измерения скорости звука при использовании конкретных приборов, которые измеряют скорость звука на глубине нахождения с использованием интерферометрических методов, фазовых методов, импульсных методов и частотных методов. Эти приборы, как правило, устанавливаются на борту судна и измеряют скорость звука при погружении до определенной глубины. Для расчетов траекторий распространения сигналов используются таблицы, снятые для всех глубин и для всех морей и океанов, в которых указаны значения скоростей звука на различных глубинах. Как правило, эти значения являются устаревшими и не всегда соответствуют решаемым задачам (стр. 98, там же). Есть разовые гидрофизические зонды, которые погружаются до дна и по мере погружения передают информацию о значении скорости звука на конкретной глубине. Этот способ является дорогим и затратным и не всегда может быть использован при решении конкретных задач для получения скорости звука по трассе.
Здесь надо учитывать то обстоятельство, что измерение происходит в одной конкретной точке по глубине и считается, что такое же распределение скорости звука будет по всей трассе распространения сигнала, что не всегда соответствует действительности. Практически никто не проводил измерение скорости звука по трассе распространения сигнала до обнаруженной цели ввиду сложности работ и трудности их сопоставления.
Известен способ измерения скорости звука по трассе с использованием взрывных источников излучения, который рассматривается в работе Роберт Дж. Урик. «Основы гидроакустики». Судостроение Л., 1978 г. Стр. 165-200.
Наиболее полно дистанционное измерение скорости звука с использованием гидроакустического канала рассмотрено в работе В.А. Комлякова «Корабельные средства измерения скорости звука и моделирования акустических полей в океане». СПб.: «Наука», 2003 г., стр. 149-153.
Известен способ дистанционного измерения скорости звука по трассе до неподвижного маяка-ответчика по патенту РФ №2581416.
Способ измерения скорости звука, содержащий излучение гидроакустического зондирующего сигнала неподвижным источником и прием зондирующего сигнала подвижным приемником, излучение зондирующего сигнала производят через постоянные промежутки времени Т, сохраняя длительность зондирующего сигнала постоянной, прием зондирующего сигнала осуществляют приемным устройством, движущимся на встречу по траектории распространения зондирующего сигнала, определяют скорость V движения носителя приемного устройства, определяют время прихода первого зондирующего сигнала t1, определяют время прихода N-гo зондирующего сигнала tN, а скорость звука на трассе между неподвижным источником зондирующего сигнала и подвижным носителем приемного устройства определяют по формуле:
C=(N-1)VT/{t1-tN+(N-1)T}.
Недостатком данного способа является невозможность определения скорости звука по трассе распространения эхосигнала от цели при работе гидролокатора по своему прямому назначению.
Техническим результатом изобретения является обеспечение измерения скорости звука при работе гидролокатора по трассе распространения эхосигнала по подвижной и по неподвижной целям.
Указанный технический результат достигается тем, что в способ измерения скорости звука гидролокатором по трассе распространения сигнала до цели, содержащий излучение зондирующего сигнала постоянной длительности через постоянные промежутки времени Т, прием эхосигналов от цели приемным устройством, определение скорости Vсоб движения носителя приемного устройства, введены новые признаки, а именно прием эхосигнала и измерение его параметров производят статическим веером N горизонтальных характеристик направленности с шириной характеристики направленности Q° не больше 2°, запоминают время излучения первого зондирующего сигнала tиз1, измеряют время приема первого эхосигнала tпр1 и номер принявшей его характеристики направленности N1, определяют дистанцию до объекта Д1=0,5С(tиз1-tпр1), где С=1500 м/с, измеряют время излучения второго зондирующего сигнала tиз2, определяют время приема второго эхосигнала tпр2 и номер принявшей его характеристики направленности N2, определяют дистанцию до цели Д2=0,5С(tиз2-tпр2) определяют скорость сближения носителя гидролокатора и цели как Vсб=[(Д2-Д1)/Т, определяют курсовой угол цели Q°=2°N2 по номеру характеристики направленности, в которой принят эхосигнал по второй посылке, и если измеренная скорость сближения Vсб находится в пределах от Vсоб до cosQ°Vсоб, где Q° меньше или равно ±10°, то считают цель неподвижной и определяют скорость звука по трассе по формуле Ср=2VсобТ/{(tпр1-tпр2)+T)}, если Vсб не находится в пределах от Vсоб до cosQ°Vсоб, то считают цель подвижной и скорость звука определяется по формуле  , где Δt={(tиз1-tпр1)-(tиз2-tпр2)}, при этом время между посылками Т должно быть больше чем Т>100 м/Vсоб.
, где Δt={(tиз1-tпр1)-(tиз2-tпр2)}, при этом время между посылками Т должно быть больше чем Т>100 м/Vсоб.
Сущность предлагаемого технического решения заключается в следующим.
Прежде чем измерять скорость звука по трассе распространения зондирующего сигнала до цели и эхосигнала до приемника, необходимо определить, какая цель, подвижная или неподвижная. Критерием для этого является оценка скорости сближения, которая определяется по двум последовательным посылкам с измерением времени распространения и дистанции Vр=[(Д2-Д1)]/T, при этом Д1=0,5С(tиз1-tпр1), а Д2=0,5С(tиз2-tпр2). В этих равенствах используется оценка скорости звука, равная 1500 м/с, что для определения скорости сближения не внесет существенную ошибку в оценку скорости сближения, поскольку она умножается на разность разности времен. Для определения подвижной и неподвижной цели принятое значение скорости звука не является существенным. При принятии решения о подвижности и неподвижности необходимо учитывать погрешность оценки курсового угла, для чего необходимо умножить оценку собственной скорости Vсоб на cos10°=0,98. Оценки времен излучения и приема эхосигналов при определении радиальной скорости использованы далее при самой процедуре измерения скорости звука.
Если зондирующий сигнал излучается в момент времени tиз1, то время распространения до объекта и обратно будет равно tпр1 и оценка дистанции Д будет равна Д1=0,5Cp(tиз1-tпр1), где Ср - реальная скорость звука. Если гидролокатор движется прямолинейно и равномерно со скоростью Vсоб и излучает зондирующие сигналы через равные промежутки времени Т, то за время между излучениями будет пройдено расстояние Дпр=VсобТ. Тогда оценка дистанции, полученная по второму зондирующему сигналу, излученному в момент времени tиз2 и принятому в момент времени tпр2, будет равна Д2=0,5Cp(tиз2-tпр2). Если учесть, что Д2=Д1-VсобТ, можем написать систему уравнений:
Д1=0,5Cp(tиз1-tпр1).
Д1-VсобT=0,5Cp(tиз2-tпр2) или Д1=0,5Cp(tиз2-tпр2)+VсобT,
0,5Cp(tиз1-tпр1)=0,5Cp(tиз2-tпр2)+VсобT,
0,5Cp[(tиз1-tпр1)-(tиз2-tпр2)]=VсобT,
откуда можно получить оценку скорости распространения звука по неподвижной цели, при которой скорость сближения Vсб находится в пределах от Vcoб до cosQ°Vсоб. После преобразования можно упростить:
Ср=2VсобТ/{(tпр1-tиз1)-(tпр2-tиз2)}=2VсобT/{(tпр1-tпр2)-(tиз1-tиз2)}=2Vco6T/{(tпр1-tпр2)-(-T)}=2VcoбT/{(tпр1-tпр2)+T}.
При работе по подвижной цели необходимо учитывать скорость перемещения подвижной цели.
Будем исходить из следующего очевидного положения. Если цель удаляется, то дистанция увеличивается, что равносильно увеличению скорости звука. Если цель приближается, то дистанция уменьшается, что равносильно уменьшению скорости звука. Поэтому для подвижной цели можно написать
(Ср±Vcб)=2VcoбT/{(tпр1-tпр2)+T)}
Скорость сближения определяется по формуле
Vcб=(Д2-Д1)/T=[Ср±(Ср±ΔC)]{(tиз1-tпр1)-(tиз2-tпр2)}/T, где первый ± соответствует приближению или удалению цели, второй ± - разнице между истинным значением скорости звука Ср, которое мы измеряем, и принятым значением для определения радиальной скорости.
Для определения порядка величин рассмотрим выражение:
(Ср±ΔC){(tиз2-tпр2)-(tиз1-tпр1)}/T.
Обозначим Δt=(tиз1-tпр1)-(tиз2-tпр2)}, тогда, раскрыв скобки, имеем
СрΔt/Т±ΔСΔt/Т.
Из этих двух слагаемых второе существенно меньше первого, поскольку ±ΔС меньше С. Если положить максимальный разброс между скоростью звука при распространению по трассе и при измерении радиальной скорости ±ΔС=±50 м/с, то при разности времен порядка Δt=0,1 с и Т=10 с имеем ±ΔСΔt/Т=±0,5 м/с. Первое слагаемое равно 1500 м/с ⋅ 0,1/10 или 15 м/с, что в 30 раз больше, поэтому этой составляющей можно пренебречь, даже при максимальной разности 50 м/с. Следует учесть, что реальная разность будет еще меньше.
Тогда
(Ср±Ср{(tиз1-tпр1)-(tиз2-tпр2)}/T)=2VcoбT/{(tпр1-tпр2)+T)}
Cр(1±{(tиз1-tпр1)-(tиз2-tпр2)}/T)=2VT/{(tиз1-tпр1)-(tиз2-tпр2)}
Cр=2VT/{(tиз1-tпр1)-(tиз2-tпр2)}/(1±{(tиз1-tпр1)-(tиз2-tпр2)}/T)
Скорость распространения звука по трассе при работе гидролокатора по подвижной цели:

или после упрощения

Точность измерения интервала между излучениями может быть обеспечена современными методами достаточно высокая, она составляет величину порядка 0,001 с = 1 мс. Длительность излучаемого сигнала может быть выбрана порядка 1 мс, что в условиях прямого распространения обеспечит большое отношение сигнал/помеха при измерении по переднему фронту. Точность измерения скорости движения современными измерителями составляет величину меньше 0,01 м/с. (А.В. Богородский, Д.Б. Островский «Гидроакустические навигационные и поисково-обследовательские средства», Санкт Петербург, 2009 г. Изд. ЛЭТИ, стр. 48). В этих условиях ошибка оценки скорости звука при двух последовательных измерениях за счет ошибки скорости движения будет в пределах 1 м/с.
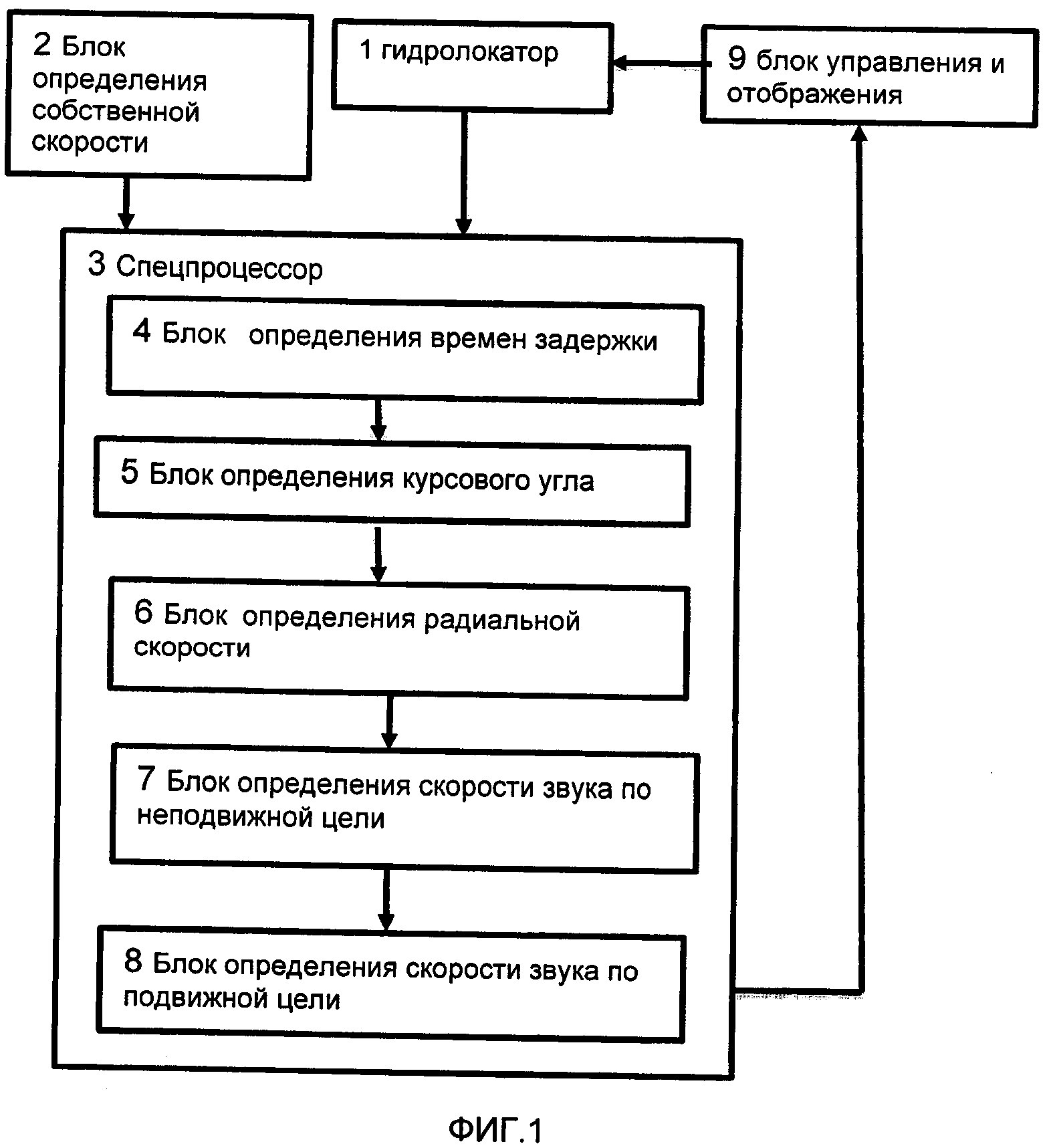
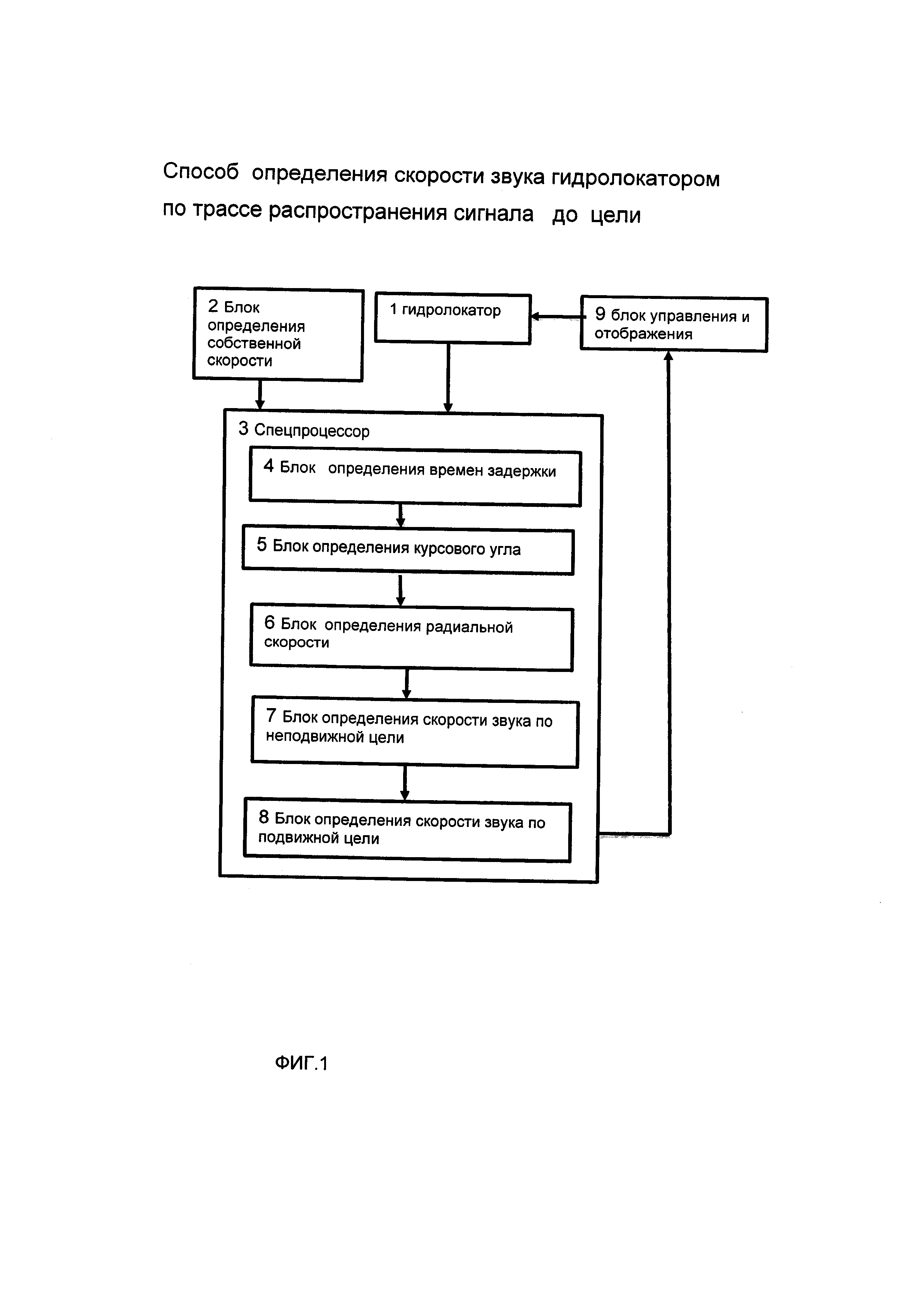
Сущность изобретения поясняется фиг. 1, на которой представлена блок-схема устройства, реализующего заявленный способ.
Гидролокатор 1 соединен со спецпроцессором 3, в состав которого входят последовательно соединенные блок 4 определения времен задержки, блок 5 определения курсового угла, блок 6 определения скорости сближения, первый выход которого соединен с блоком 7 определения скорости звука по неподвижной цели, а второй выход с блоком 8 определения скорости звука по подвижной цели. Выход спецпроцессора 3 соединен с блоком 9 управления и отображения, выход которого соединен с гидролокатором 1. На второй вход спецпроцессора 3 поступает информация от блока 2 измерителя собственной скорости.
Гидролокатор 1 является известным устройством, которое подробно описано в отечественной литературе А.С. Колчеданцев. «Гидроакустические станции». Судостроение, Л., 1982 г., А.Н. Яковлев, Г.П. Кабаков «Гидролокаторы ближнего действия» Судостроение, Л., 1983 г. В состав гидролокатора, как правило, входят антенна с системой формирования характеристик направленности, приемное устройство, передающее устройство, индикатор и система управления. Все блоки, используемые для определения скорости звука, могут быть выполнены в тех же спецпроцессорах, на которых реализуется работа приемных трактов современных гидролокационных станций. Это стандартные спецпроцессоры, которые работают по разработанным программам и жесткой логике управления при поступлении исходной информации. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника». СПб. «Наука», 2004 г., с. 281-289). Практически все указанные процедуры могут быть реализованы на современных компьютерах и ноутбуках, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко Цифровая обработка сигналов СПб. «БХВ - Петербург», 2011 г.). Гидроакустический измеритель собственной скорости движения блок 2 является известным устройством, которые выпускаются серийно и устанавливаются на всех современных судах (А.В. Богородский, Д.Б. Островский «Гидроакустические навигационные и поисково-обследовательские средства», Санкт Петербург 2009 г. Изд. ЛЭТИ, стр. 40-81). Блок 9 управления и отображения - известное устройство, которое содержится во всех гидролокаторах и которое обеспечивает отображение и управление результатом измерения скорости звука по трассе.
С помощью предлагаемого устройства определения скорости звука по трассе производится следующим образом. Сигнал управления с блока 9 поступает на гидролокатор 1, который формирует зондирующий сигнал и излучает его в водную среду. Прием эхосигналов осуществляется приемной антенной гидролокатора 1, которая имеет статический веер характеристик направленности. С выхода гидролокатора 1 обнаруженные эхосигналы поступают на спецпроцессор 3 в блок 4, где производится определение времен запаздывания эхосигналов tиз1, tпр1 по первому зондирующему сигналу и tиз2, tпр2 по второму зондирующему сигналу. В блоке 5 определяются характеристики направленности N1, N2 и курсовой угол обнаруженной цели Q°'. По измеренным временам задержки двух последовательных излучений зондирующего сигнала определяется скорость сближения. В блоке 7 сравниваются оценки скорости сближения и собственной скорости с учетом измеренного курсового угла. Если оценка скорости сближения Vсоб находится в пределах от Vсоб до cosQ°Vсоб, что соответствует условиям неподвижной цели, то производится определение скорости звука по трассе распространения для неподвижной цели Ср=2VсобТ/{(tпр1-tпр2)+T}. Если условия не соответствуют неподвижной цели, то производится определение скорости звука в блоке 8 по формуле для подвижной цели

Таким образом, предложенная процедура измерения последовательных временных интервалов позволяет определять скорость распространения звука по трассе по отраженным эхосигналам от неподвижной цели и от подвижной цели.
Способ определения скорости звука гидролокатором по трассе распространения сигнала до цели, содержащий излучение зондирующего сигнала постоянной длительности через постоянные промежутки времени Т, прием эхосигналов от цели приемным устройством, определение скорости движения носителя V приемного устройства, отличающийся тем, что прием эхосигнала и измерение его параметров производят статическим веером N горизонтальных характеристик направленности с шириной характеристики направленности Q° не больше 2°, запоминают время излучения первого зондирующего сигнала t, измеряют время приема первого эхосигнала t и номер принявшей его характеристики направленности N, определяют дистанцию до объекта Д = 0,5С (t - t), где C=1500 м/c, измеряют время излучения второго зондирующего сигнала t определяют время приема второго эхосигнала t и номер принявшей его характеристики направленности N, определяют дистанцию до цели Д = 0,5С (t - t), определяют скорость сближения как V = [(Д - Д) / T, определяют курсовой угол цели Q° = 2°N по номеру характеристики направленности, в которой принят эхосигнал по второй посылке, и если измеренная скорость сближения V находится в пределах от V до cosQ°V, где Q° меньше или равно ±10°, то считают цель неподвижной и определяют скорость звука по трассе по формуле С = 2 V Т / {(t - t) + T)}, если V не находится в пределах от V до cosQ°V, то считают цель подвижной и скорость звука определяется по формуле , где Δt = {(t - t) - (t - t)}, при этом время между посылками Т должно быть больше чем Т>100 м/V.
Способ обработки сигнала шумоизлучения объекта
Антенная система эхолота для надводного корабля
Способ измерения скорости звука
Гидроакустический способ определения пространственных характеристик объекта на дне
Гидроакустический способ обработки рыбопромысловой информации
Гидролокационный способ обнаружения подводных объектов в контролируемой акватории
Способ измерения радиальной скорости объекта по его шумоизлучению
Способ цветового кодирования информации гидроакустического шумопеленгования
Гидроакустический способ измерения глубины погружения неподвижного объекта
Активный гидролокатор
Способ обнаружения и классификации сигнала от цели
Способ определения глубины погружения приводняющегося объекта
Способ классификации объекта, обнаруженного гидролокатором
Способ измерения параметров перемещения источника зондирующих сигналов
Гидроакустическая система
Способ измерения толщины льда с подводного носителя
Способ определения скорости звука
Способ измерения изменения курсового угла движения источника зондирующих сигналов
Способ определения ошибки оценки дистанции гидролокатором
Способ определения глубины погружения объекта

