Результат интеллектуальной деятельности: СПОСОБ СЪЕМКИ НИЖНЕЙ ПОВЕРХНОСТИ ЛЕДЯНОГО ПОКРОВА
Вид РИД
Изобретение
Изобретение относится к гидролокации, а более конкретно к гидролокационной съемке нижней поверхности ледяного покрова и может быть использовано для мониторинга ледовых образований на акваториях с морскими терминалами, в том числе и на шельфе в условиях высоких широт.
Известен способ съемки нижней поверхности ледяного покрова (Гудошников Ю.П., Козлов Д.Н., Кубышкин Н.В, Водолазные исследования торосов и стамух в Баренцевом море в 2003 г. // Комплексные исследования и изыскания ледовых и гидрометеорологических явлений и процессов на арктическом шельфе. СПб. 2004. Труды ААНИИ. Том 449, с.238-246 [1]). который заключается в следующем. В небольшие майны, расположенные в районах работ по разбуриванию торосов морфометрии и подводной гидролокации, опускается видеокамера в герметичном боксе для выбора места спуска водолазов. Критерием при выборе места спуска является наличие участка ровного льда не далее 50 м от наиболее заглубленной части киля тороса. На выбранном участке ровного льда готовится рабочая майна размером 2×1.5 м для спуска водолазов, расчищается от снега световая дорожка от майны к торосу для увеличения освещенности под водой. Рядом с майной устанавливается обогревательная палатка. Спуск водолазов выполняется в специальных гидрокостюмах. Подводная фото- и видеосъемка производится на цифровую видеокамеру, аналоговую видеокамеру и фотоаппарат «Зенит ЕТ» с объективом «Мир», помещенные в герметичные боксы. Для масштабирования изображений на боксы устанавливают лазерные указатели, обеспечивающие параллельные лучи с базовым расстоянием 0,5 м. Для проверки глубины отснятых объектов и ориентации камеры перед ее объективом устанавливают глубиномер с указателями крена и дифферента. Для подсветки снимаемых объектов используют подводные светильники 200 Вт и две фотовспышки по 80 Дж каждая. Цифровая и аналоговая видеокамеры в боксах, светильники с аккумуляторами и лазерные указатели конструктивно смонтированы в одном блоке. Для привязки подводных наблюдений к данным бурения в скважины опускают маркированные рейки таким образом, чтобы маркировка была хорошо различима для подводного наблюдателя. После проведения съемок, по полученным фото- и видеоматериалам выполняют анализ о морфометрии подводной части ледяного покрова.
Данный способ имеет существенные ограничения по использованию, обусловленные пределом погружения водолазов, наличие мутности в водных слоях. Кроме того. привязка подводных наблюдений с использованием маркированной рейки имеет невысокую точность, что при камеральной обработке полученных материалов может внести дополнительную погрешность. Реализация способа весьма трудоемкая.
Известен также способ и устройство для его осуществления (Гидролокационная съемка нижней поверхности ледяного покрова / Зубакин Г.К., Криницкий П.И., Гудошников Ю.П. и др. // Комплексные исследования и изыскания ледовых и гидрометеорологических явлений и процессов на арктическом шельфе. СПб. 2004. Труды ААНИИ. Том 449, с.229-237 [2]), который реализуется следующим образом. Во льду рядом с исследуемым объектом на расстоянии 20-50 м бурится лунка диаметром не менее 180-220 мм. В лунку, проверенную на наличие «подсовов». опускается антенная конструкция на глубину сканирования. Рядом устанавливается палатка, в которой размещается регистрирующая аппаратура. Над лункой размещается поворотная платформа. Кабель-трос зажимается во втулке поворотной платформой. С помощью анкерного устройства антеннам придают рабочее положение. К приемопередатчику подключается кабель от антенного модуля и линия от подводного блока с телеметрией. Производится экспозиция, длительность которой зависит от радиуса излучаемого кругового пространства ледовой поверхности. По окончании экспозиции полученное изображение визуализируется на мониторе в полярной системе координат. На одной лунке съемка ведется с нескольких горизонтов, количество которых определяется глубиной моря и характером ледяного покрова. Демонтаж комплекса производится в обратном порядке. После приведения всего оборудования в транспортное состояние комплекс перемещается на следующую точку. В перерыве между ледовыми станциями результаты съемки в цифровом виде записываются на компакт-диске. При необходимости распечатывается твердая копия на принтере.
Энергообеспечение осуществляется переносной электростанцией. Рабочая палатка обогревается электротепловентилятором. Графическая станция размещается в термоблоке. Экспозиции привязаны к топопланам верхней поверхности льда. Результаты гидролокационной съемки даются в виде графических файлов bmp-формата, содержащих изображения результатов сканирования нижней поверхности льда, каждое из которых представляет собой круговое поле, его центром является точка установки гидролокатора. Выступы на нижней поверхности льда обозначаются белыми засветками на общем темно-синем фоне поля. Тень, отбрасываемая выступом при сканировании, отображается темным пятном. На круговом поле введена прямоугольная система координат, такая же, как и используемая при топосъемке верхней поверхности льда на данной станции.
Обработка снимков осуществляется при помощи программы View Polar sonar, которая позволяет определить горизонтальные размеры элементов рельефа нижней поверхности льда и заглубление выступов на ней по длине тени в направлении радиуса сканирования. Измерения в горизонтальной плоскости выполняются в режиме «Линейные размеры», что позволяет определить расстояние между двумя точками с известными координатами при помощи «мыши». Определение величины заглубления выступов происходит аналогичным образом. В режиме «высота киля» после введения поправки на толщину льда при помощи «мыши» отмечается точка конца тени от интересующего выступа. При этом высвечивается радиус сканирования, на котором отмечается точка начала тени. После выбора обеих точек в нижней части экрана в отдельных окнах выводятся координаты и заглубление (в метрах) выбранной точки выступа.
Устройство для реализации известного способа представляет собой гидролокатор кругового обзора, работающий в полярной системе координат PSS-2, и конструктивно состоит из антенны, размещенной на анкерном устройстве, немагнитной штанги с анкерным устройством жестко соединенной с несущим кабель-тросом, поворотной платформы, которая вращает кабель-трос, прецизионного датчика вращения, двухканального приемопередатчика, станции обработки данных на базе портативного компьютера PENTIUM-11, спутниковой навигационной системы GPS, системы электроснабжения. При этом рабочая частота приемопредатчика 115 кГц, длительность импульса посылки 125 мкс, излучаемая мощность 1,5 кВт, ширина диаграммы направленности 0,8 градусов. Устройство также содержит фазовый канал и блок телеметрии, включающий датчики крена, дифферента, заглубления и азимута излучаемого сигнала.
При использовании данного устройства время одной экспозиции в зависимости от радиуса охвата составляет от 10 до 40 минут. Телеметрия позволяет определить пространственную ориентацию антенного модуля, а использование фазового канала дает получить картину видимой части исследуемого объекта (кили торосистых образований, изометрические морфоструктуры поверхности дна ледового образования). В оптимальных условиях светотеневая картина нижней поверхности ледяного покрова может охватывать площадь до 400-750 м в диаметре при работе из одной лунки.
Достоинствами способа является то, что можно обследовать на максимальное заглубление киля на порядок больше торосов, выявить заглубленные выступы на нижней поверхности льда, расположенные между точками бурения, и не обнаруженные прямыми измерениями, а также оценить такую важную морфометрическую характеристику, как максимальное заглубление килей торосов.
К недостаткам известного способа могут быть отнесены следующие.
1. Сложная форма нижней поверхности всторошенного льда может приводить к появлению дополнительной погрешности определения осадки киля. Эта погрешность возникает в случае, когда за наиболее выступающей частью киля расположен участок всторошенного льда с большой протяженностью вдоль радиуса сканирования, не только не перекрываемый тенью от выступа, но и ограничивающий ее размеры. Для устранения этой погрешности в известном способе вводится поправка, обусловленная толщиной льда в районе наиболее удаленной от центра сканирования границы тени. Эта поправка определяется по данным механического бурения и прибавляется к максимальной осадке киля, определенной по размерам тени. Поскольку при сканировании охватывается площадь ледяного покрова, в несколько раз превышающая полигон сквозного бурения, возможен вариант, когда данные о толщине льда в районе тени, по результатам бурения отсутствуют. В этом случае в качестве поправки принимают среднюю толщину ровного льда в районе станции. Однако при этом возможно внесение дополнительной погрешности в конечный результат из-за неточного значения поправки на толщину льда. Аналогичный вариант также возможен, когда тень, отбрасываемая килем тороса, выходит за границу кругового снимка.
2. Отсутствует возможность построения модели рельефа, которая очень важна для оценки возможных последствий от сближения дрейфующих торосов и айсбергов с буровыми платформами и морскими газовыми и нефтяными терминалами.
Кроме того, способ имеет ограниченное применение, так как может выполняться только с ледовых полей, на которых могут быть оборудованы станции, заглубление антенного блока не превышает 25 м.
3. Система навигации (визуальное воспроизведение ледового поля) построена по известной технологии GA принципа организации точки наблюдения трехмерной сцены, в которой используется стандартный принцип - точка наблюдения расположена вне сцены и при навигации сцена неподвижна, а изменяются координаты точки наблюдения и угол наблюдения. При этом центр вращения явно не определяется, что и является одной из причин потери изображения при навигации.
Известны также способы и устройства (патент FR №2431137, патент FR №2509869, патент DE №2481791, патенты GB №1418614, GB №1486068, патенты US №4596007, №4603408, №4605140, авторские свидетельства SU №747313, №1060033 [3-12]), представляющие собой гидролокационные системы, предназначенные для топографического представления донной поверхности и нижележащих слоев, и размещенные внутри капсулы, буксируемой в погруженном положении судном-носителем. В принципе, данные системы могут быть использованы для топографического представления погруженной части ледяного поля или айсберга путем ее сканирования гидролокационными сигналами, что позволит исключить погрешность определения осадки киля за счет расширения границы исследуемого участка при использовании параметрических антенн (а.с. SU №1060033, №688104, патент US №4287580 [12-14]). Однако размещение гидролокационных систем в буксируемых капсулах судном-носителем требует сложной системы ориентации и позиционирования для удержания капсулы относительно судна и ледового поля, что практически исключает вариант их использования для съемки рельефа подводной части ледяных полей, представляющих собой торосистые поверхности.
Известно также техническое решение, техническим результатом которого, является повышение достоверности съемки поверхности ледяного покрова (патент RU №24444760 С1, 10.03.2012 [15)].
В известном способе съемки нижней поверхности ледяного покрова [15], клторый включает размещение гидроакустической аппаратуры в водной среде для получения картины видимой части исследуемого объекта (кили торосистых образований, изометрические морфоструктуры поверхности дна ледового образования), производство экспозиций, которые привязаны к топопланам верхней поверхности льда и длительность которых зависит от радиуса излучаемого кругового пространства ледовой поверхности, получение изображения, которое визуализируется на мониторе в полярной системе координат в виде графических файлов bmp-форматов, содержащих изображения результатов сканирования нижней поверхности льда, выполнение съемки с нескольких горизонтов, количество которых определяется глубиной моря и характером ледяного покрова, измерения в горизонтальной плоскости в режиме "линейные размеры", определение расстояний между двумя точками с известными координатами, согласно изобретению гидроакустическую аппаратуру размещают на управляемом подвижном морском объекте, приемно-излучающее устройство содержит параметрическую антенну и размещено на поворотной платформе, имеющей три степени свободы, изображение получают в трехмерном пространстве с визуализацией полного объема ледяного покрытия и с разбивкой объемов ледяного покрытия по секторам, которые различают по их частотным характеристикам, оценивают размер этих секторов по интервалу частот между минимальными и максимальными значениями силы цели на частотных зависимостях, расстояние между элементами ледяного поля, расположенными на расстояниях, меньших длительности зондирующего импульса, определяют по форме отраженного линейного частотно-модулированного сигнала.
Достоинствами способа является то, что можно обследовать на максимальное заглубление киля на порядок больше торосов, выявить заглубленные выступы на нижней поверхности льда, расположенные по всей поверхности и не обнаруженные прямыми измерениями, а также оценить такую важную морфометрическую характеристику, как максимальное заглубление килей торосов.
Однако, при любой плотности точек истинное местоположение поверхности рельефа нижней поверхности ледяного поля, между точками измерения остается неизвестным. Истинная поверхность может лежать выше или ниже положения отрезка прямой (соответствующего ребру триангуляции), соединяющей две точки в трехмерном пространстве. Отклонение высот пропорционально расстоянию между точками, но не определено. Аналогичное утверждение будет верно относительно плоскости треугольника в трехмерном пространстве, образованного тремя смежными точками двумерной триангуляции. Более того, полностью точное представление поверхности рельефа для любой плотности точек измерения глубин принципиально невозможно вследствие фрактальности рельефа (Жуков Ю.Н Рельеф Земли как математический объект // Навигация и океанография. 2011, №33).
Задачей предлагаемого технического решения является повышение достоверности съемки нижней поверхности ледяного покрова.
Поставленная задача решается за счет того, что в способе съемки нижней поверхности ледяного покрова, включающим размещение гидроакустической антенны, приемно-излучающего устройства в водной среде для получения картины видимой части исследуемого объекта - килей торосистых образований, изометрических морфоструктур поверхности дна ледового образования, производство экспозиций, которые привязаны к топопланам верхней поверхности льда и длительность которых зависит от радиуса излучаемого кругового пространства ледовой поверхности, получение изображения, которое визуализируется на мониторе в полярной системе координат в виде графических файлов bmp-форматов, содержащих изображения результатов сканирования нижней поверхности льда, выполнение съемки с нескольких горизонтов, количество которых определяется глубиной моря и характером ледяного покрова, в котором гидроакустическую антенну, приемно-излучающее устройство, выполненное в виде гидрофона, размещают на управляемом подвижном морском объекте, приемно-излучающее устройство размещают на поворотной платформе, имеющей три степени свободы, изображение получают в трехмерном пространстве с визуализацией полного объема ледяного покрытия и с разбивкой объемов ледяного покрытия по секторам, которые различают по их частотным характеристикам, оценивают размер этих секторов по интервалу частот между минимальными и максимальными значениями силы цели на частотных зависимостях, расстояние между элементами ледяного поля, расположенными на расстояниях, меньших длительности зондирующего импульса, определяют по форме отраженного линейного частотно-модулированного сигнала, в котором в отличие от прототипа [15], для получения картины видимой части исследуемого объекта (кили торосистых образований, изометрические морфоструктуры поверхности дна ледового образования), выполняют построение верхней и нижней границ триангулированных поверхностей, устанавливают степень искривленности и индекс элементарной формы каждого объема ледяного покрытия для каждого сектора поверхности рельефа, для полного отображения изменчивости склонов рельефа ледового образования в каждой точке поверхности определяют уклон поверхности как величину и направление градиента.
Техническая реализация заявляемого изобретения поясняется чертежами (фиг.1-9).
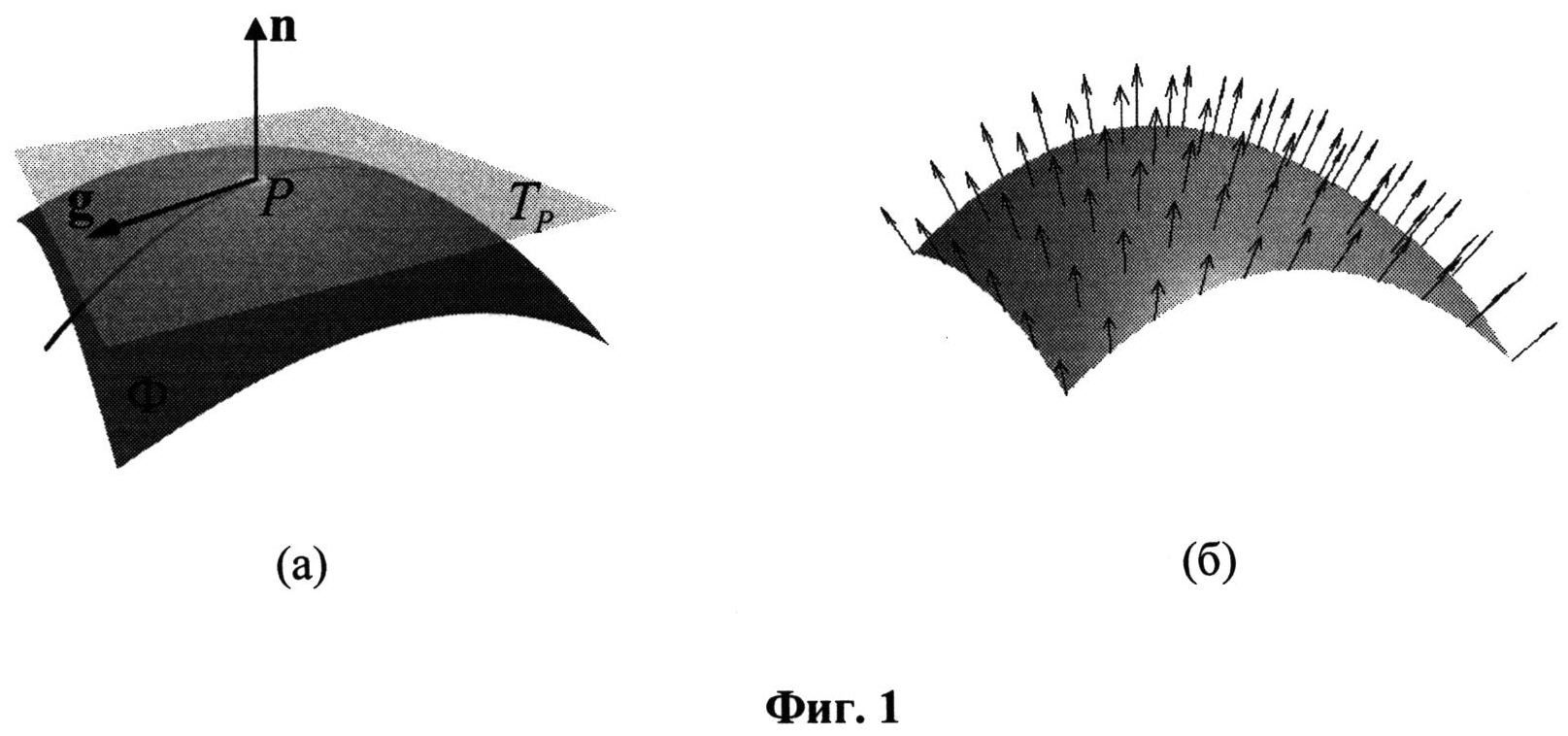
Фиг.1. Иллюстрация понятия «касательная плоскость» (а) и поля нормалей (б) к гладкой поверхности.
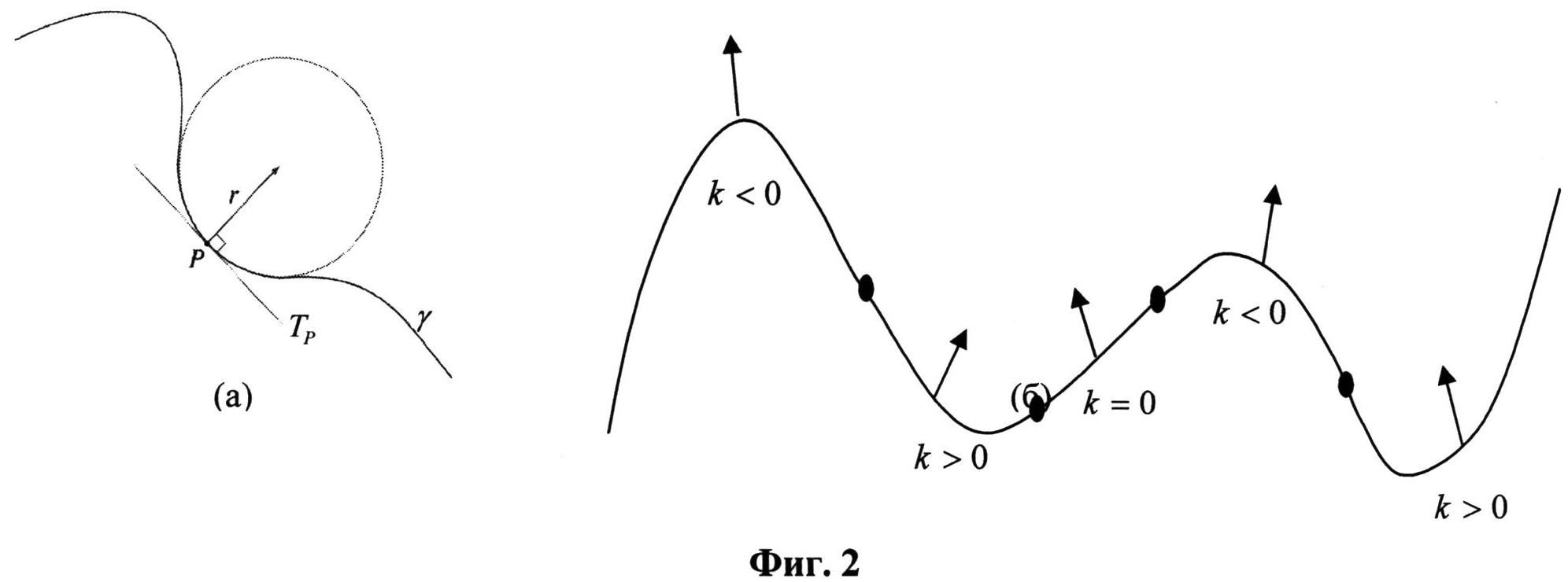
Фиг.2. Иллюстрация к понятию радиуса кривизны плоской кривой - (а), (б) - кривизна плоской кривой γ положительна в точках, где γ искривляется в сторону своей нормали, и отрицательна, где γ отклоняется от своей нормали (точки - границы участков кривой с одинаковым знаком кривизны).
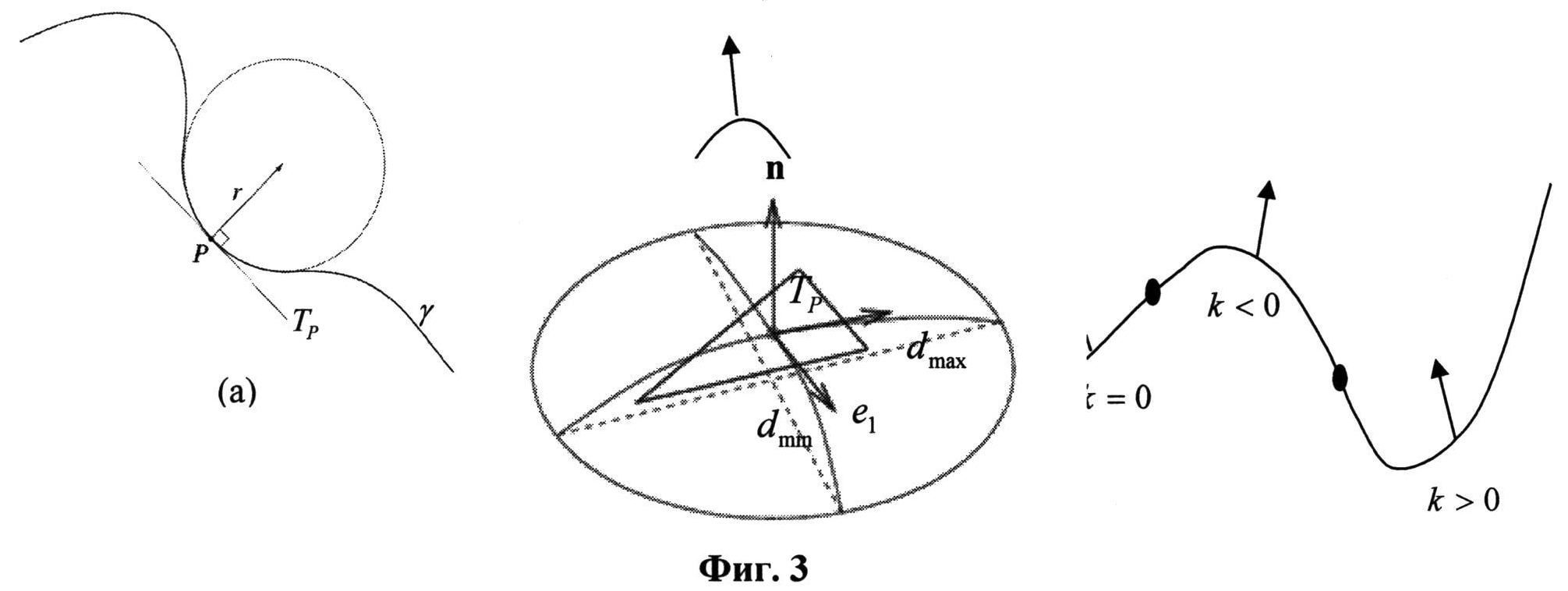
Фиг.3. Главные направления для поверхности эллипсоида вращения
(dmin и dmax - полуоси соответствующего эллипса).
Фиг.4. Иллюстрация параметров вычисления гауссовой и средней кривизны для одной вершины ν триангуляции. Здесь αi - угол треугольника fi (грани триангуляции) при вершине ν, вычисляемый как угол между соответствующим ребром, образованным векторами ei и ei+1; βi - угол между смежными треугольными гранями, вычисляемый как угол между соответствующими нормалями.
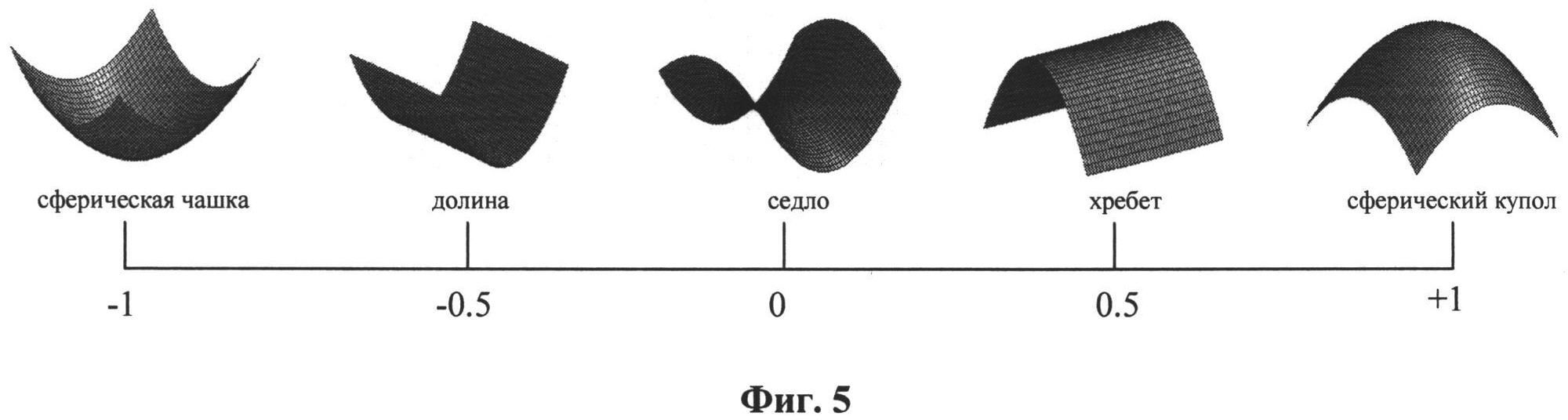
Фиг.5. Соответствие между индексом формы s и элементарными искривленными формами поверхности.
Фиг.6. Соответствие между искривленностью с и формой поверхности.
Фиг.7. График поверхности рельефа Северного Ледовитого океана, построенный по регулярной сетке глубин (стереографическая проекция).
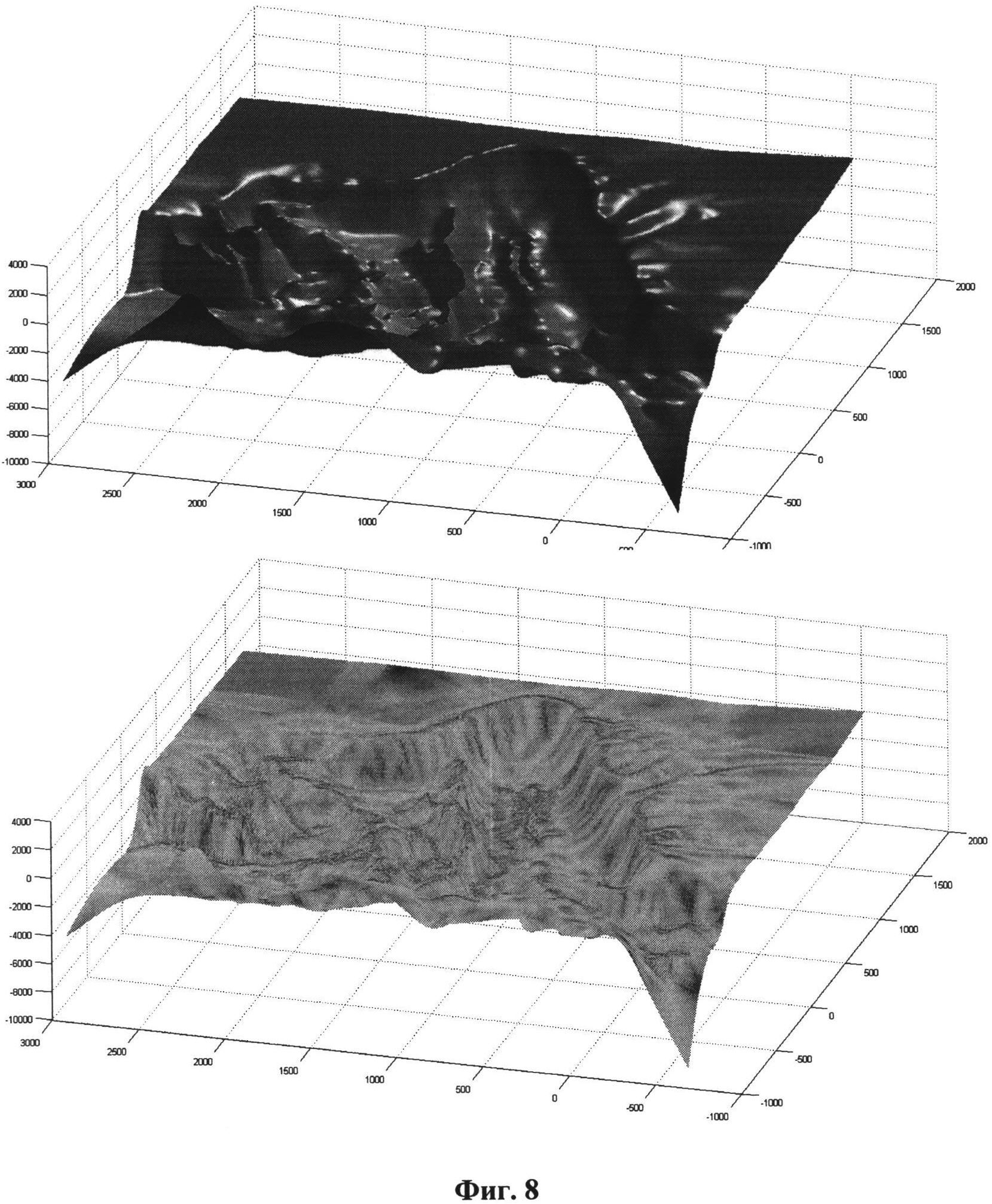
Фиг.8. График значений искривленности с поверхности рельефа Северного Ледовитого океана (фиг.7) в стереографической проекции. Более темным участкам соответствуют участки поверхности рельефа с большими значениями искривленности с.
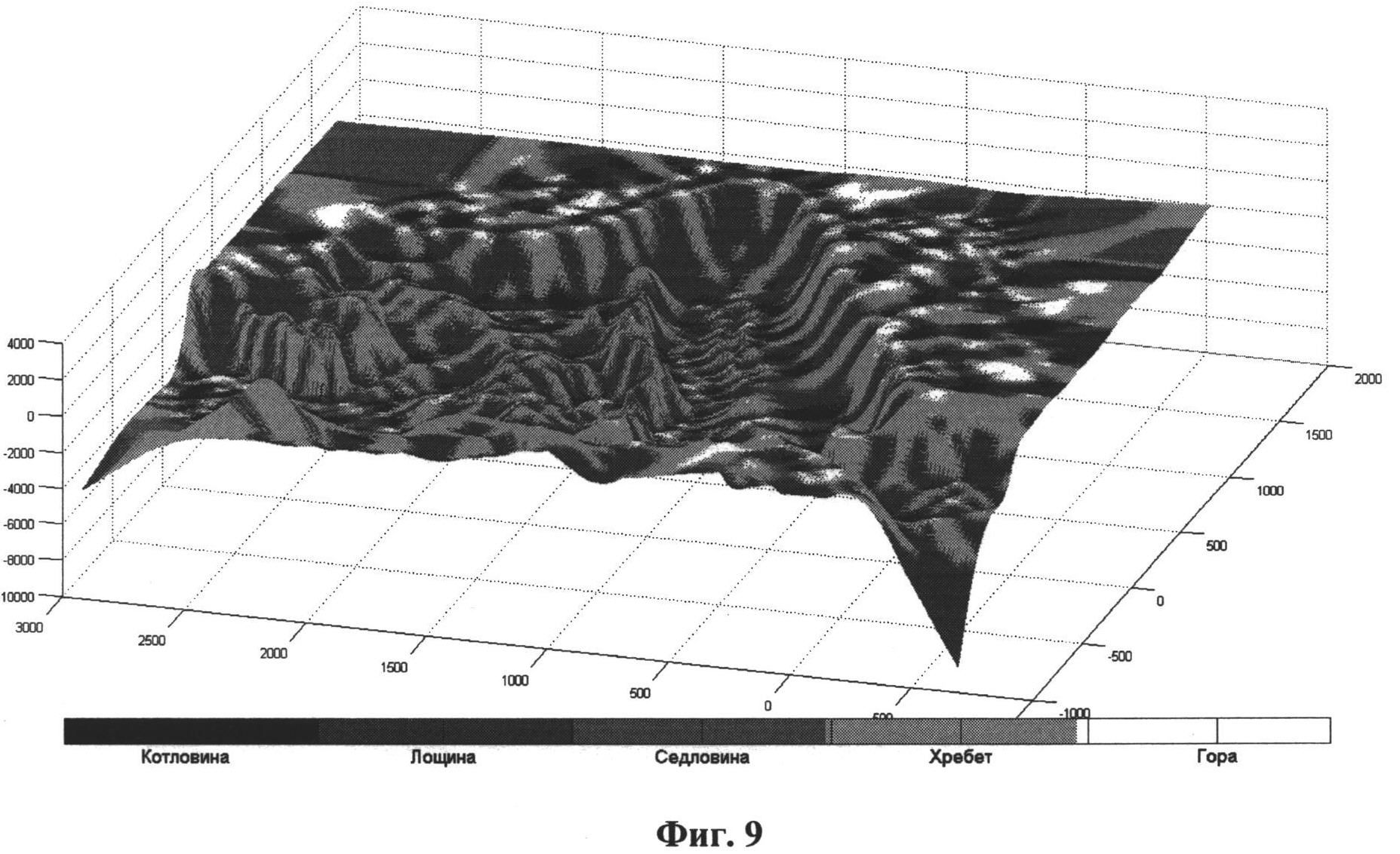
Фиг.9. График значений индекса формы 5 поверхности рельефа Северного Ледовитого океана (фиг.7) в стереографической проекции.
Способ реализуется следующим образом.
Как и в прототипе [15], гидроакустическая аппаратура устанавливается на управляемый подвижный аппарат.
Приемно-излучающее устройство устанавливается на поворотную платформу, имеющую три степени свободы, что позволяет осуществлять гидролокационное облучение ледового образования под разными углами и вдоль вертикальных и горизонтальных плоскостей ледового образования.
Первоначально ледовое образование (дрейфующее ледяное поле) обследуется вдоль периметра дрейфующего ледового образования при нахождении управляемого подвижного аппарата на водной поверхности. Затем управляемый подвижный аппарат погружается. При погружении управляемого подвижного аппарата осуществляется гидролокационная съемка подводной части ледового образования. Далее управляемый подвижный аппарат перемещается вдоль периметра ледяного образования. При этом выполняется гидролокационная съемка боковых стенок ледового образования. При всплытии управляемого подвижного аппарата выполняется гидролокационная съемка другой боковой стенки ледового образования. При этом, если за одно погружение и всплытие на поверхность управляемого подвижного объекта невозможно получить полный обзор боковых сторон ледяного образования, то режим погружения и всплытия повторяют с неохваченных гидролокатором сторон ледяного образования. После выполнения гидролокационной съемки по периметру и глубине погружения приступают к гидролокационной съемке подошвы ледяного образования.
Измерения выполняются с помощью широкополосного параметрического источника с реализацией в излучающем тракте параметрической гидроакустической локационной системы двухканального метода формирования исходных сигналов со средней частотой накачки 165 кГц, с диапазоном разностных частот, равным 5-50 кГц. Перестройка частоты в указанном диапазоне осуществляется как в течение длительности импульса по линейному закону, так и в режиме медленно меняющейся частоты от импульса к импульсу через 2, 4, 8 посылок. Шаг перестройки разностной частоты составляет 0,2 кГц.
При этом разница коэффициентов усилителя приемного тракта для каналов прямого и отраженного импульса отличается на величину, равную расстоянию между килями ледяного образования. Так как частота биений зависит от девиации частоты излучаемого сигнала и расстояния между килями, то по форме отраженного линейного частотно-модулированного сигнала различают одиночную и групповую цели и оценивают расстояние между элементами групповой цели при расположении объектов на расстояниях, меньших длительности зондирующего импульса.
Совпадение огибающих отраженных сигналов от ледяных образований с их частотными зависимостями дает возможность за одну посылку судить о частотных характеристиках отражающих элементов ледяного образования. По характеру частотных зависимостей силы цели элементов ледяного образования, можно различать одиночные объекты (кили) от групповых при их расположении на расстоянии, меньшем половины длительности зондирующего импульса.
Полученные изображения ледяного образования визуализируется на мониторе в полярной системе координат в виде графических файлов bmp-форматов, содержащих изображения результатов сканирования верхней и нижней поверхности льда. Съемку выполняют с нескольких горизонтов, количество которых определяется глубиной моря и характером ледяного покрова.
Далее выполняют картографическое построение ледяного образования с учетом таких факторов, как вид генерализуемого объекта, степень извилистости линии на мониторе, степень уменьшения генерализуемого объекта.
При этом выполняют следующие операции:
- сегментацию-разделение линейного объекта по геометрическим показателям (кривизна, фрактальная размерность, фрактальный множитель);
- упрощения путем уменьшения количества точек линии;
- сглаживания путем уменьшения кривизны линии;
- смещения части линии или некоторых точек линии;
- утрирования, заключающегося в утверждении или исключении отдельных элементов, не выражающихся в уменьшенном масштабе карты.
При этом полученная кривая или сигнал подвергается всплеск-преобразованию (Берлянт A.M., Бусин О.Р., Собчук Т.В. Картографическая генерализация и теория фракталов. М.: МГУ им. Ломоносова - 1998. - 136 с.; с.96-112).
По заданному масштабу (разрешению) карты определяется генерализованная кривая (сигнал).
Посредством коэффициентов всплеск-преобразования разделяют кривые, характеризующие конфигурацию килей и торосистых поверхностей, а также общую поверхность на области с различной сложностью, что дает иерархическое многомасштабное представление анализируемого сигнала и обеспечивает эффективные геометрические преобразования на выбранных уровнях точности, быструю классификацию данных, быстрое отображение и мультиразрешающий рисунок ледяной поверхности.
При построении рельефа нижней поверхности ледового образования на графопостроителе непрерывную область акватории с измеренными глубинами дискретизируют посредством узлов регулярной сетки. Затем определяют граф, задавая связи (ребра графа) на этой сетки. Связи определяются путем индексирования узлов регулярной сетки с помощью дерева Фарадея-Коши.
Обработка исходных наблюдений при этом включает процедуру введения координат (упорядочения) точек измерения - триангуляцию. При этом поверхность подменяется триангуляционной сетью - неориентированным графом. Структура графа (фиг.5) представляет информацию только об упорядочении пространственных координат-точек с измеренными значениями (глубинами). Модельной функцией нахождения структурных линий на поверхности рельефа - гребней и ложбин, является функция
Н(х,y)=3(1-x)2exp(-x)2-(y+1)2-10(x/5-x3-y5)exp(-x2-y2)-1/3ехр(-(х+1)2-y2),
в области которой находятся точки наблюдений (измерений). При использовании известных способов восстановления рельефа (например, триангуляция Делоне и линейная интерполяция) получим график в виде функции, представленной на чертеже (фиг.5а). При предлагаемом способе триангуляционная сетка точек измерении, описываемых функцией Н(х,y), строится в виде взвешенного неориентированного графа. При этом гребни и ложбины соответствуют путям на ребрах этого графа с минимальной длиной. Эти минимальные пути определяются посредством алгоритма Дейкстры - поиска кратчайших путей на графе. В результате получим график функции в виде, представленном на чертеже (фиг.5в). Структура графа с точки зрения представления информации о геопространственном поле в ЭВМ, как поверхности, является дискретной информационной структурой, соответствующей дискретной форме внутреннего функционирования ЭВМ.
Далее определяют погрешность Θ(Н) восстановления рельефа в виде максимального значения абсолютной величины разности между истиной поверхностью и восстановленной
 ,
,
где K - общее число первых моментов, обеспеченных точностью. Точности оценки моментов δ(Ik) будут определяться структурой расположения точек измерения.
Для оптимального распределения точек (измерений), которые всегда можно определить на исходном множестве точек (см. например. Соболь И.М. Многомерные квадратурные формулы и функции Хаара. М.: Наука, 1969, с.288.) с точностью оценки момента для нормированной функции в соответствии с выражением δ(Ik)≤2/Nk.
Восстановление формы рельефа ледового образования может выполняться после каждой серии дискретных измерений, что позволяет данный способ отнести к средствам объективного контроля в отличие от известных способов. Эффективность восстановления формы рельефа по дискретным измерениям определяется тем, что он основан на интегральных преобразованиях, тем самым ошибки не увеличиваются как в известных способах. Существенным преимуществом заявляемого способа и устройства для его осуществления является возможность точного измерения координат рассеивающих слоев.
Применение метода деконволюции при обработке временных рядов позволяет получить оценки коэффициентов авторегрессионной модели с минимальной дисперсией ошибок. Использование алгоритма Левинсона для решения задачи деконволюции наблюдаемого временного ряда дает возможность при минимальных вычислительных затратах определить искомые параметры модели сложно-неоднородной среды. Процедура определения параметров сложно-неоднородной среды реализована с помощью фильтра линейного предсказания, выполненного в виде оптимального решетчатого фильтра.
В отличие от прототипа [15], при использовании которого при любой плотности точек истинное местоположение поверхности рельефа между точками измерения остается неизвестным и истинная поверхность может лежать выше или ниже положения отрезка прямой (соответствующего ребру триангуляции), соединяющей две точки в трехмерном пространстве, в предлагаемом техническом решении выполняют учет всех трех координат точек измерения глубин, а именно, двух пространственных координат и собственно величины глубины, посредством трехмерной триангуляцией Делоне. Результаты трехмерной триангуляции позволяют получить оценку погрешности реконструкции рельефа дна и оценить допустимость плотности точек для восстановления рельефа с заданной погрешностью.
Построение верхней и нижней границ триангулированных поверхностей выполняют методом α - формы (Alok K. Chaturvedi and Les A. Piegl, "Procedural method for terrain surface interpolation", Comput. and Graphics, Vol.20, No.4, pp.541-566, 1966, Elsevier Science Ltd, GB), что позволяет выявить форму поверхности по неупорядоченному «облаку» точек. При этом такого рода построения направлены на уточнение рельефа земной поверхности.
В предлагаемом техническом решении при построении рельефа дна дополнительно определяют местоположение линий подводных хребтов и долин ледового образования путем вычислений значений гауссовой и средней кривизны, а поверхность рельефа строят по регулярной сетке. Все многообразие неровностей, из которых слагается рельеф поверхности ледового образования, можно в основном свести к следующим пяти элементарным формам: гора, котловина, хребет, лощина, седловина (Леонтьев О., Рычагов Г. Общая геоморфология М.: Высш. шк., 1979. - 287 с.). Вершина горы, дно котловины, точка седловины являются характерными точками рельефа; линия водораздела хребта, линия водослива лощины, линия подошвы горы или хребта, линия бровки котловины или лощины являются характерными линиями рельефа. Для оконтуривания основных форм рельефа целесообразно применить мощности ЭВМ, что в свою очередь требует использования методов и алгоритмов, специализированных для этих целей. Методы вычисления на ЭВМ основных форм рельефа с учетом принятых форматов представления рельефа в электронном виде известны из источников: Гильберт Д., Кон-Фоссен С. Наглядная геометрия. - М.: Нука, 1981. - 344 с. Лорд И.А., Уилсон С.Б. Введение в дифференциальную геометрию и топологию. Математическое описание вида и формы. - Москва-Ижевск: Институт компьютерных исследований, 2003. - 304 с. Торп Дж.
В известных способах уклон (крутизна) склона участка рельефа определяется как угол, образуемый направлением склона с горизонтальной плоскостью, который выражается обычно в угловой мере (Белобров А.П. Гидрография моря. М.: Транспорт, 1964. - 515 с.). При этом при описании уклона отсутствуют необходимые два параметра: направление, в котором рассматривают изменение глубин (высот) поверхности рельефа, и координаты точки, к которой следует отнести величину уклона. Приведенное понятие "уклона" является эклектическим аналогом производной в точке по некоторому направлению для непрерывной гладкой поверхности, а именно гладкой поверхностью представляется рельеф на картах.
Ограничимся небольшим куском поверхности Ф и оставим его граничные точки без рассмотрения (фиг.1). Рассмотрим точку Р поверхности и все кривые на этой поверхности, проходящие через точку Р. В дифференциальной геометрии доказывается, что касательные, которые можно провести к этим кривым в точке Р, лежат в одной плоскости, вследствие этого называемой касательной плоскостью Тр. Максимальный вектор в касательной плоскости называется градиентом g. Именно поле градиентов полностью характеризует изменчивость склонов рельефа. Градиент как вектор в точке Р характеризуется значением - уклоном и направлением. Отметим, что зачастую неявно предполагают, что уклон представляет собой градиент. Однако это является смешением понятий. Уклон - скаляр, а градиент - вектор. Именно из последнего следует, что для полного отображения изменчивости склонов рельефа необходимо построение в каждой точке поверхности двух характеристик: уклона, как величины градиента, и направления градиента. Единичный вектор n, перпендикулярный к касательной плоскости в точке Р поверхности, называется нормалью к поверхности в точке Р. Кривые, образующиеся при пересечении поверхности плоскостями, проходящими через нормаль к поверхности, называются нормальными сечениями. Вектор нормали однозначно соответствует касательной плоскости и, естественно, градиенту в точке Р плоскости.
Очевидно, что градиента как характеристики крутизны склонов недостаточно для выявления основных форм поверхности рельефа ледового образования. Для этого необходимо иметь информацию о локальных значениях скорости и направлении изменения градиента в окрестности точки Р, которые характеризуют свойства выпуклости и вогнутости поверхности в точке Р. Действительно, вблизи линии резкого изменения крутизны (например, линии хребта) будет наблюдаться большая скорость изменения градиентов. Необходим параметр, описывающий скорость изменения производной по направлению в точке Р поверхности. В дифференциальной геометрии в качестве такого параметра используется кривизна поверхности в точке Р. Практическая значимость этого понятия состоит в том, что каждому значению кривизны соответствует определенная элементарная форма поверхности. Затем эти элементарные формы можно сопоставить основным формам рельефа. Другими словами, все возможные значения кривизны можно классифицировать по основным формам рельефа ледового образования, что позволяет, вычислив значение кривизны в точке поверхности, отнести ее к той или другой основной форме рельефа ледового образования.
Прежде чем определить кривизну для поверхности необходимо дать определение кривизны для плоской кривой. Пусть γ(t) - регулярная кривая в 2-мерном евклидовом пространстве, параметризованная длиной t. Тогда  называется кривизной кривой γ в точке Р=γ(t), здесь
называется кривизной кривой γ в точке Р=γ(t), здесь  обозначает вторую производную по t. Вектор
обозначает вторую производную по t. Вектор  называется вектором кривизны γ в точке Р=γ(t). Очевидно, это определение можно переписать через вектор касательной
называется вектором кривизны γ в точке Р=γ(t). Очевидно, это определение можно переписать через вектор касательной  :
:  , где одна точка над буквой означает первую производную по t.
, где одна точка над буквой означает первую производную по t.
Чтобы кривая γ совпадала с некоторым отрезком прямой или со всей прямой, необходимо и достаточно, чтобы кривизна (или вектор кривизны) тождественно равнялась нулю. Величина, обратная кривизне кривой (r=1/k), называется радиусом кривизны; он совпадает с радиусом соприкасающейся окружности в данной точке кривой. Центр этой окружности называется центром кривизны (фиг.2а).
Таким образом, кривизна кривой γ(t) в точке Р измеряет нормальную компоненту ускорения с единичной скоростью, проходящей через Р. Отметим смысл знака k(P): если k(P)>0, то в точке Р кривая поворачивает в сторону своей нормали n(Р), если же k(P)<0, то кривая поворачивает от n(Р), то есть удаляется от n(Р) (фиг.2б).
Теперь задача состоит в том, чтобы перенести понятие кривизны для кривой на поверхность. В случае кривых кривизна характеризует отклонение кривой от своей касательной в рассматриваемой точке. Поставим теперь аналогичный вопрос о поведении поверхности по отношению к своей касательной плоскости.
Пусть Ф регулярная поверхность в трехмерном евклидовом пространстве. Пусть Р - точка Ф, ТР - касательная плоскость к Ф в точке Р, n - единичная нормаль к Ф в точке Р, а - πe плоскость, проходящая через n и некоторый единичный вектор е в ТР. Кривая γe, получающаяся как пересечение плоскости πe с поверхностью Ф, называется нормальным сечением поверхности Ф в точке Р в направлении е. Величина ke=k·n, где "·" обозначает скалярное произведение, а k - вектор кривизны γe в точке Р называется нормальной кривизной поверхности Ф в направлении е. С точностью до знака нормальная кривизна равна кривизне кривой γe.
В касательной плоскости ТР существуют два перпендикулярных направления е1 и e2 такие, что нормальную кривизну в произвольном направлении можно представить с помощью так называемой формулы Эйлера: ke=k1cos2α+k2sinα, где α - угол между е1 и е, величины k1 и k2 нормальные кривизны в направлениях е1 и е2, называющиеся главными направлениями поверхности в точке Р. На главных направлениях значения кривизны являются экстремальными (далее полагаем, что k1>k2) для соответствующих нормальных сечений (фиг.3).
Величина Н=k1+k2, (иногда (k1+k2)/2) называется средней кривизной поверхности. Величина K=k1k2 называется гауссовой кривизной поверхности.
При вычислении кривизны на ЭВМ для поверхности рельефа ледового образования используемый метод будет определяться форматом исходных данных, представляющих поверхность рельеф ледового образования. Основных форматов два: глубины (высоты) в нерегулярной сети точек (TIN) и глубины (высоты) в регулярной сети точек (GRID) (Kringer K.S. Geomorphometric Analysis of Airborne Laserscanning data for Soil Mapping in an Alpine Valley Bottom. - School: Institute of Geography, University of Innsbruck, 2010. - 136 p. Wilson M.F.J., O'Connell В., Brown C., Guinan J.C., Grehan A.J. Multiscale Terrain Analysis of Multibeam Bathymetry Data for Habitat Mapping on the Continental Slope. // Marine Geodesy, 2007, 30, p.3-35.).
Глубины (впадины) в регулярной сети точек могут иметь две различных интерпретации, которые часто явно не оговариваются. В одной трактовке значения глубины представляют как постоянные значения глубин в регулярной ячейке. Так например, такая интерпретация принята в базе IBCAO, где каждое значение глубины в регулярном наборе является средним значением в ячейке размером 2.5×2.5 км (Jakobsson M., Macnab R, International Bathymetric Chart of the Arctic Ocean (IBCAO). Beta Version. Technical Reference and User's Guide. - Stockholm University, Geological Survey of Canada, 2008. - 16 p.). Для такой интерпретации гладкость поверхности отсутствует - градиенты равны нулю во всех точках, за исключением граничных точек ячеек, где градиент не существует. В этой интерпретации характеристики изменчивости, описанные выше, не применимы. В другой глубины, заданные на регулярной сетке, соответствуют глубинам в центре ячеек. Здесь можно рассматривать линейное изменение глубин и изложенное выше применимо.
Наиболее общий способ оценки кривизны поверхности в точке использует представление глубин в нерегулярной сети точек (TIN). Для каждой вершины триангуляции ν (фиг.4) вычисляются значения гауссовой и средней кривизны:
где
 ,
,
 - сумма площади всех треугольных граней инцидентных вершине ν, а αi и βi как определено на фиг.4., знак ||·|| определяет евклидову норму.
- сумма площади всех треугольных граней инцидентных вершине ν, а αi и βi как определено на фиг.4., знак ||·|| определяет евклидову норму.
Отсюда можно вычислить k1 и k2:


Для данных о рельефе, представляющих массив регулярных точек, используются специализированные методы. Они представляют собой оценку кривизны для некоторой точки сетки {i,j}. Здесь i - номер строки, a j - номер столбца сетки. Гауссова и средняя кривизна оцениваются по формулам:
 ,
,
где hx, hy, hxx, hyy, hxy означают первые, вторые и смешанные производные по х и y, которые вычисляются в конечных разностях по строкам (х) и столбцам (y). Аналогично (1) и (2) можно вычислить k1(i,j) и k2(i,j).
Рассмотрим плоскость всевозможных значений {k1,k2}. В работе (Koenderink J. J., van Doorn A. J. Surface shape and curvature scales. // Image and Vision Computing. 1992, October. 10(8), pp.557-565.) показано, что каждой возможной элементарной форме гладкой поверхности соответствует некоторая пара значений [k1,k2]. Учитывая поворотную и зеркальную симметрии элементарных форм поверхности, можно ввести в рассмотрение два новых параметра: индекс формы s (shape index) и искривленность с (curvedness), определяемые через величины k1 и k2:
 .
.
Величины значений индекса формы s лежат в интервале от -1 до +1. Некоторым значениям s можно поставить в соответствие четкие элементарные формы искривленной поверхности (фиг.5). В интервалах между этими значениями элементарные формы имеют переходные черты. Между "сферической чашкой" и "долиной" лежат "корытообразные формы", между "сферическим куполом" и "хребтом" лежат "куполообразные формы". При s=0 располагается "симметричное седло".
Этим элементарным формам естественно сопоставляются основные формы рельефа: "сферическому куполу" - гора (или холм) как возвышенность конусообразной формы; "сферической чашке" - котловина как углубление конусообразной формы; "хребту" - хребет как вытянутая и постепенно понижающаяся в одном направлении возвышенность; "долине" - лощина как вытянутое и открытое с одного конца постепенно понижающееся углубление, "седлу" - седловина как небольшое понижение между двумя соседними горами.
Очевидно, что существуют разновидности названий перечисленных основных форм, определяемые масштабом рассматриваемой формы рельефа, например, разновидности лощины: долина, овраг, каньон, промоина, балка и т.д. Иногда разновидности названий основных форм характеризуют особенности рельефа конкретного участка местности, например, в горах бывают пики - остроконечные вершины гор, ущелья, теснины, щеки, плато, перевалы и т.д.
Величины значений искривленности с лежат в интервале от -∞ до +∞. Значение с характеризует степень искривленности элементарной формы поверхности, чем выше значение с, тем более поверхность искривлена (остра), чем ниже значение с, тем более она плоская (фиг.6). Этот параметр позволяет выявлять области с "острыми" формами рельефа, то есть определять местоположение линий хребтов и долин.
Для иллюстрации были вычислены параметры s и с для массива регулярных точечных измерений, выполненных в Северном Ледовитом океане (фиг.7). Результаты вычислений представлены на фиг.8 и 9.
Полученные результаты свидетельствуют о том, что предлагаемый способ позволяет автоматизировать технологию нахождения основных форм рельефа ледового образования по массивам точечных измерений глубин.
При визуализации требуемой области пространства ледяного образования Система навигации построена с использованием альтернативного по отношению известной технологии GA принципа организации точки наблюдения трехмерной сцены, в которой используется стандартный принцип - точка наблюдения расположена вне сцены и при навигации сцена неподвижна, а изменяются координаты точки наблюдения и угол наблюдения. При этом центр вращения явно не определяется, что и является одной из причин потери изображения при навигации. В предлагаемой технологии точка наблюдения находится постоянно в центре окна наблюдения и визуализируется небольшим трехгранником осей, а начало трехгранника всегда является центром вращения изображения и при навигации сцена перемещается относительно этого центра.
Картографическая сцена содержит также береговую линию и объекты хозяйственной деятельности (морские терминалы), находящиеся в зоне ледовых исследований.
Предлагаемый способ дает возможность получить картину видимой части исследуемого объекта (кили торосистых образований, изометрические морфоструктуры поверхности дна ледового образования).
Достоинствами способа является то, что можно обследовать на максимальное заглубление киля на порядок больше торосов, выявить заглубленные выступы на нижней поверхности льда, расположенные по всей поверхности и не обнаруженные прямыми измерениями, а также оценить такую важную морфометрическую характеристику, как максимальное заглубление килей торосов.
Промышленная реализация предлагаемого технического решения сложности не представляет, так как предлагаемый способ может быть реализован на серийно выпускаемой аппаратуре.
Источники информации
1. Гудошников Ю.П., Козлов Д.Н., Кубышкин Н.В. Водолазные исследования торосов и стамух в Баренцевом море в 2003 г. // Комплексные исследования и изыскания ледовых и гидрометеорологических явлений и процессов на арктическом шельфе СПб. 2004. Труды ААНИИ. Том 449, с.238-246.
2. Гидролокационная съемка нижней поверхности ледяного покрова / Зубакин Г.К., Криницкий П.И., Гудошников Ю.П. и др. // Комплексные исследования и изыскания ледовых и гидрометеорологических явлений и процессов на арктическом шельфе, СПб. 2004. Труды ААНИИ. Том 449, с.229-237.
3. Патент FR №2431137.
4. Патент FR №2509869.
5. Патент DE №2481791.
6. Патент GB №1418614.
7. Патент GB №1486068.
8. Патент US №4596007.
9. Патент US №4603408.
10. Патент US №4605140.
11. A.c. SU №747313.
12. A.c. SU №1060033.
13. A.c. SU №688104.
14. Патент US №4287580.
15. Патент RU №2444760 С1, 10.03.2012.
Способ съемки нижней поверхности ледяного покрова, включающий размещение гидроакустической антенны, приемно-излучающего устройства в водной среде для получения картины видимой части исследуемых объектов - килей торосистых образований, изометрических морфоструктур поверхности дна ледового образования, производство экспозиций, которые привязаны к топопланам верхней поверхности льда и длительность которых зависит от радиуса излучаемого кругового пространства ледовой поверхности, получение изображения, которое визуализируется на мониторе в полярной системе координат в виде графических файлов bmp-форматов, содержащих изображения результатов сканирования нижней поверхности льда, выполнение съемки с нескольких горизонтов, количество которых определяется глубиной моря и характером ледяного покрова, в котором гидроакустическую антенну, приемно-излучающее устройство, выполненное в виде гидрофона, размещают на управляемом подвижном морском объекте, приемно-излучающее устройство размещают на поворотной платформе, имеющей три степени свободы, изображение получают в трехмерном пространстве с визуализацией полного объема ледяного покрытия и с разбивкой объемов ледяного покрытия по секторам, которые различают по их частотным характеристикам, оценивают размер этих секторов по интервалу частот между минимальными и максимальными значениями силы цели на частотных зависимостях, расстояние между элементами ледяного поля, расположенными на расстояниях, меньших длительности зондирующего импульса, определяют по форме отраженного линейного частотно-модулированного сигнала, отличающийся тем, что для получения картины видимой части исследуемых объектов - килей торосистых образований, изометрических морфоструктур поверхности дна ледового образования, выполняют построение верхней и нижней границ триангулированных поверхностей, устанавливают степень искривленности и индекс элементарной формы каждого объема ледяного покрытия для каждого сектора поверхности рельефа, для полного отображения изменчивости склонов рельефа ледового образования в каждой точке поверхности определяют уклон поверхности как величину и направление градиента.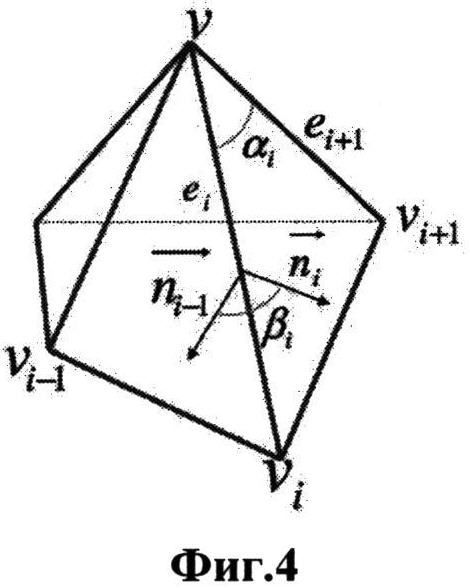


Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения

