Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ПРОГРАММНЫМ РАЗВОРОТОМ РАЗГОННОГО БЛОКА
Вид РИД
Изобретение
Изобретение относится к ракетно-космической технике, а именно к способам управления движением разгонных блоков (РБ), обеспечивающих довыведение космических аппаратов (КА) с опорной орбиты на целевую (как правило, геостационарную) орбиту, осуществление межорбитальных переходов и других операций с КА.
В космической технике известен выбранный в качестве прототипа способ управления программным разворотом разгонного блока с помощью неподвижных двигателей ориентации постоянной тяги, заключающийся в выполнении набора угловой скорости - разгоне, движении по инерции, уменьшении угловой скорости до нуля - торможении и импульсном включении двигателей ориентации при уменьшении угловой скорости ниже заданного уровня (см. [1]).
Известный способ управления программным разворотом позволяет осуществить плоский программный разворот РБ на заданный угол за заданное время с минимально возможным расходом топлива двигателями ориентации. При этом программный разворот, как правило, совершается на пассивном участке траектории выведения, когда компоненты топлива в баках РБ находятся в состоянии невесомости и не оказывают существенного влияния на динамику разворота. Однако известный способ управления не обеспечивает желаемого качества управления на активных участках, когда включены двигатели поджатия, создающие тягу в направлении продольной оси РБ. Циклограмма функционирования РБ предполагает многократное включение двигателей поджатия для осаждения компонентов топлива к днищам баков для проведения дренирования баков и запуска маршевых двигателей. При этом часто возникает необходимость осуществления программного разворота РБ на участке полета с работающими двигателями поджатия. В этом случае большие массы компонентов топлива оказываются поджатыми к нижним днищам топливных баков и во время выполнения программного разворота совершают поперечные колебания, оказывая на боковые стенки баков значительные силовые воздействия. Обычно баки располагаются в хвостовой части РБ, при этом центр масс РБ смещен к носовой части, в которой находится выводимый на орбиту достаточно массивный КА. Поэтому поперечные колебания компонентов топлива создают существенные возмущающие моменты, величины которых сравнимы с величиной управляющего момента, создаваемого двигателями ориентации. В результате процесс разворота при использовании известного способа управления сопровождается значительным «забросом» по углу (перерегулированием) и повышенной колебательностью, приводящими к увеличению расхода топлива двигателями ориентации.
Задачей предлагаемого изобретения является разработка способа управления программным разворотом разгонного блока, обеспечивающего на участке работы двигателей поджатия выполнение разворота РБ на заданный угол без перерегулирования с одновременным гашением колебаний компонента топлива, оказывающего наибольшее влияние на динамику программного разворота. Например, для существующих в настоящее время и разрабатываемых криогенных разгонных блоков таким компонентом топлива является окислитель (жидкий кислород), масса которого в несколько раз превосходит массу горючего, при этом из-за особенностей конструктивного расположения бака окислителя создается большое плечо гидродинамической силы относительно центра масс РБ.
Техническим результатом предлагаемого изобретения является оптимизация циклограммы функционирования РБ за счет расширения возможностей системы управления в части совмещения различных полетных операций.
Указанный технический результат достигается тем, что в способе управления программным разворотом разгонного блока с помощью неподвижных двигателей ориентации постоянной тяги, заключающемся в выполнении набора угловой скорости - разгоне, движении по инерции, уменьшении угловой скорости до нуля - торможении и импульсном включении двигателей ориентации при уменьшении угловой скорости ниже заданного уровня, в соответствии с изобретением в случае осуществления программного разворота, совмещенного по времени с работой двигателей поджатия, перед разворотом измеряют уровень h наиболее влияющего на динамику разворота компонента топлива в баке, а в процессе разворота периодически измеряют рассогласование по углу Δϑ и угловую скорость  разворота разгонного блока, угол sϑ и угловую скорость
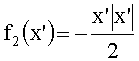
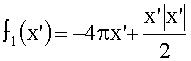
разворота разгонного блока, угол sϑ и угловую скорость  отклонения поверхности указанного компонента топлива в баке от продольной оси разгонного блока, при этом выключение двигателей ориентации в конце участка разгона осуществляют при достижении параметром x значения f1(x'), включение двигателей ориентации в начале участка торможения осуществляют при достижении параметром x значения f2(x'), где
отклонения поверхности указанного компонента топлива в баке от продольной оси разгонного блока, при этом выключение двигателей ориентации в конце участка разгона осуществляют при достижении параметром x значения f1(x'), включение двигателей ориентации в начале участка торможения осуществляют при достижении параметром x значения f2(x'), где 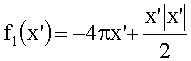 ;
;  - функции переключения, а параметры x и x' задают в виде линейных функций измеренных углов и угловых скоростей x=k(k1Δϑ+k2sϑ),
- функции переключения, а параметры x и x' задают в виде линейных функций измеренных углов и угловых скоростей x=k(k1Δϑ+k2sϑ), 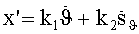 с коэффициентами k, k1, k2, определяемыми по заранее рассчитанным зависимостям от уровня h компонента топлива в баке.
с коэффициентами k, k1, k2, определяемыми по заранее рассчитанным зависимостям от уровня h компонента топлива в баке.
Сущность предлагаемого изобретения иллюстрируется фиг.1-4.
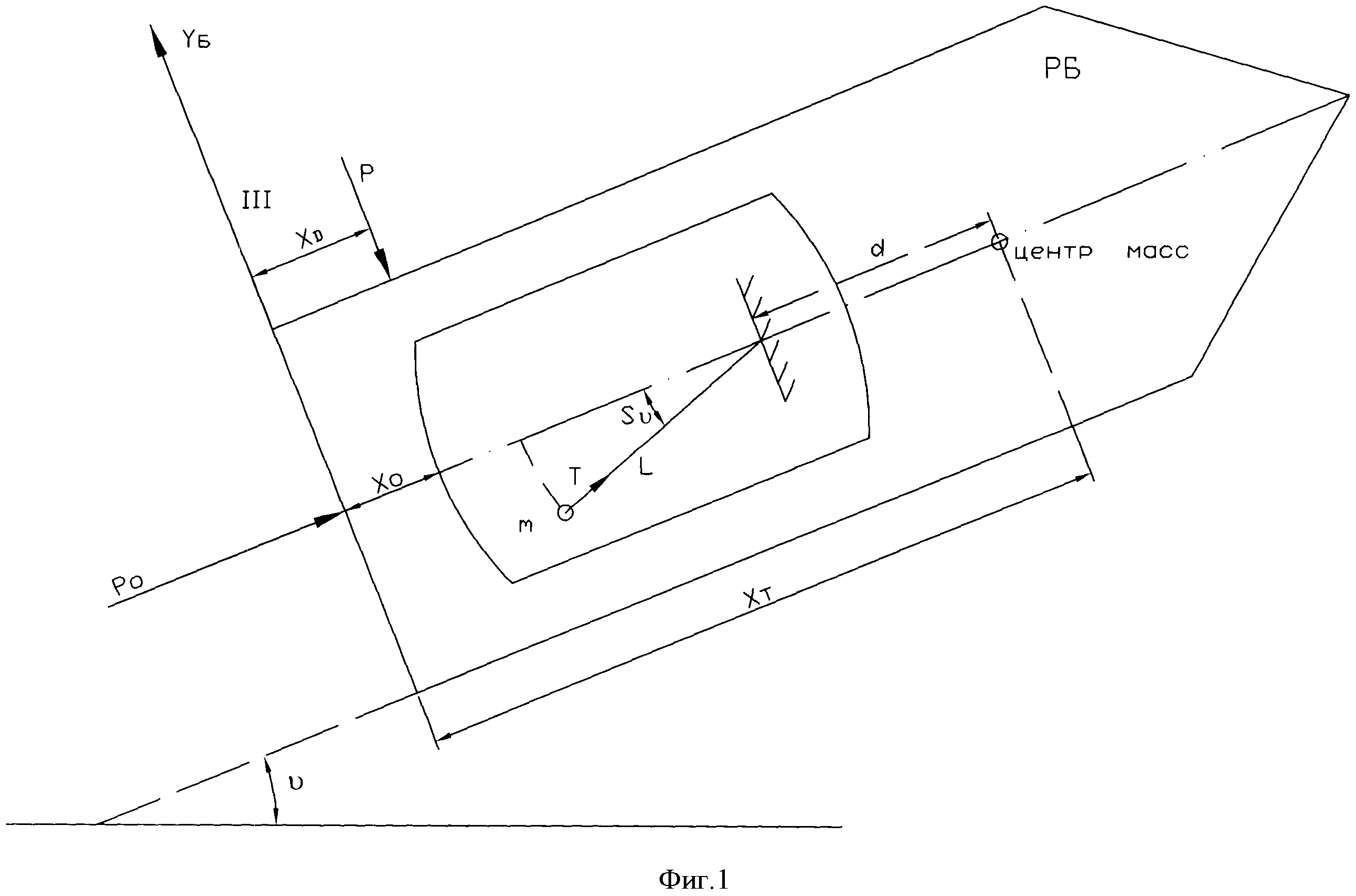
Фиг.1 - Схема разгонного блока при осуществлении программного разворота.
Фиг.2 - Программа управления разворотом в функции безразмерного времени τ.
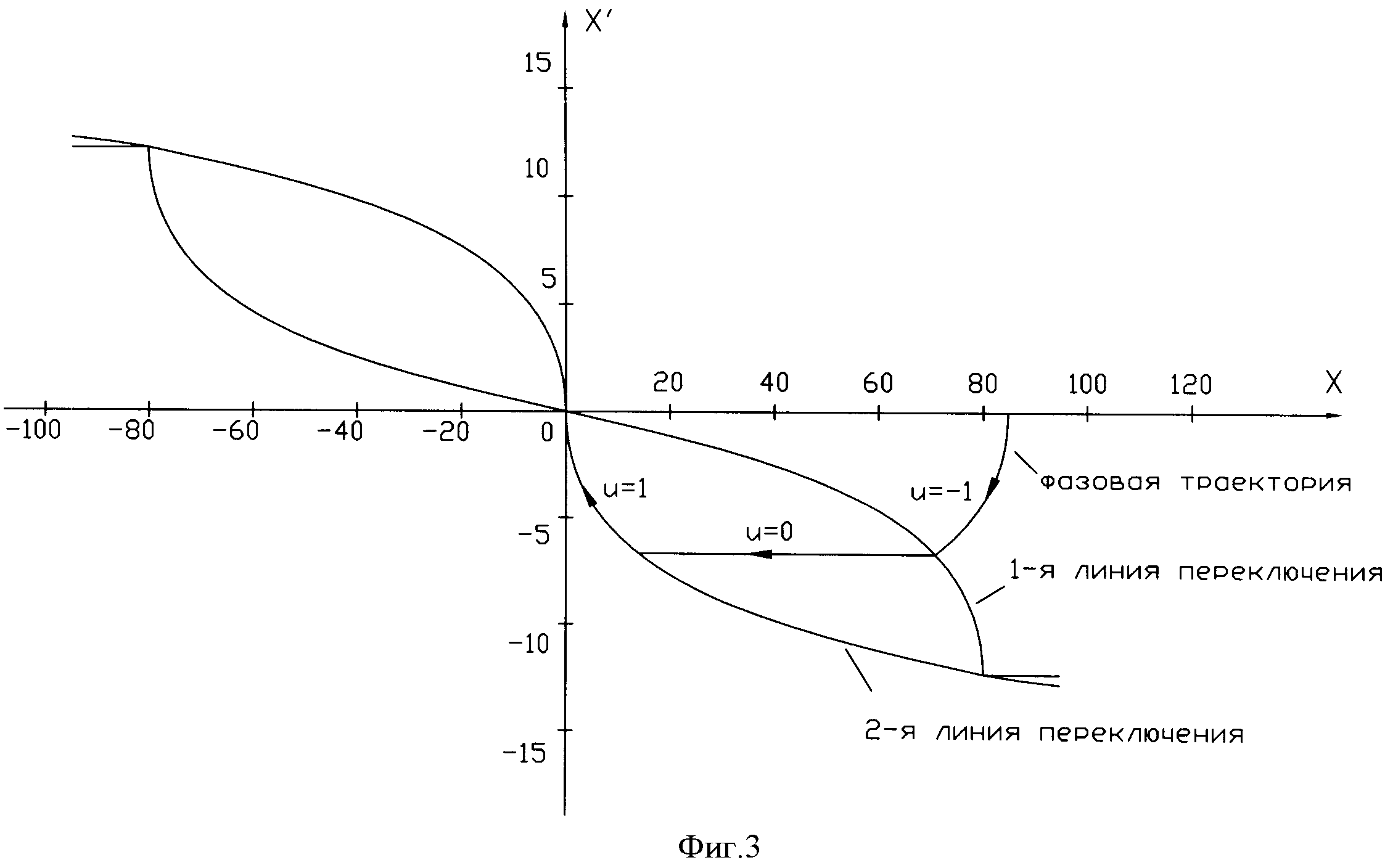
Фиг.3 - Линии переключения управления в фазовой плоскости безразмерной переменной x и ее производной x' по безразмерному времени τ.
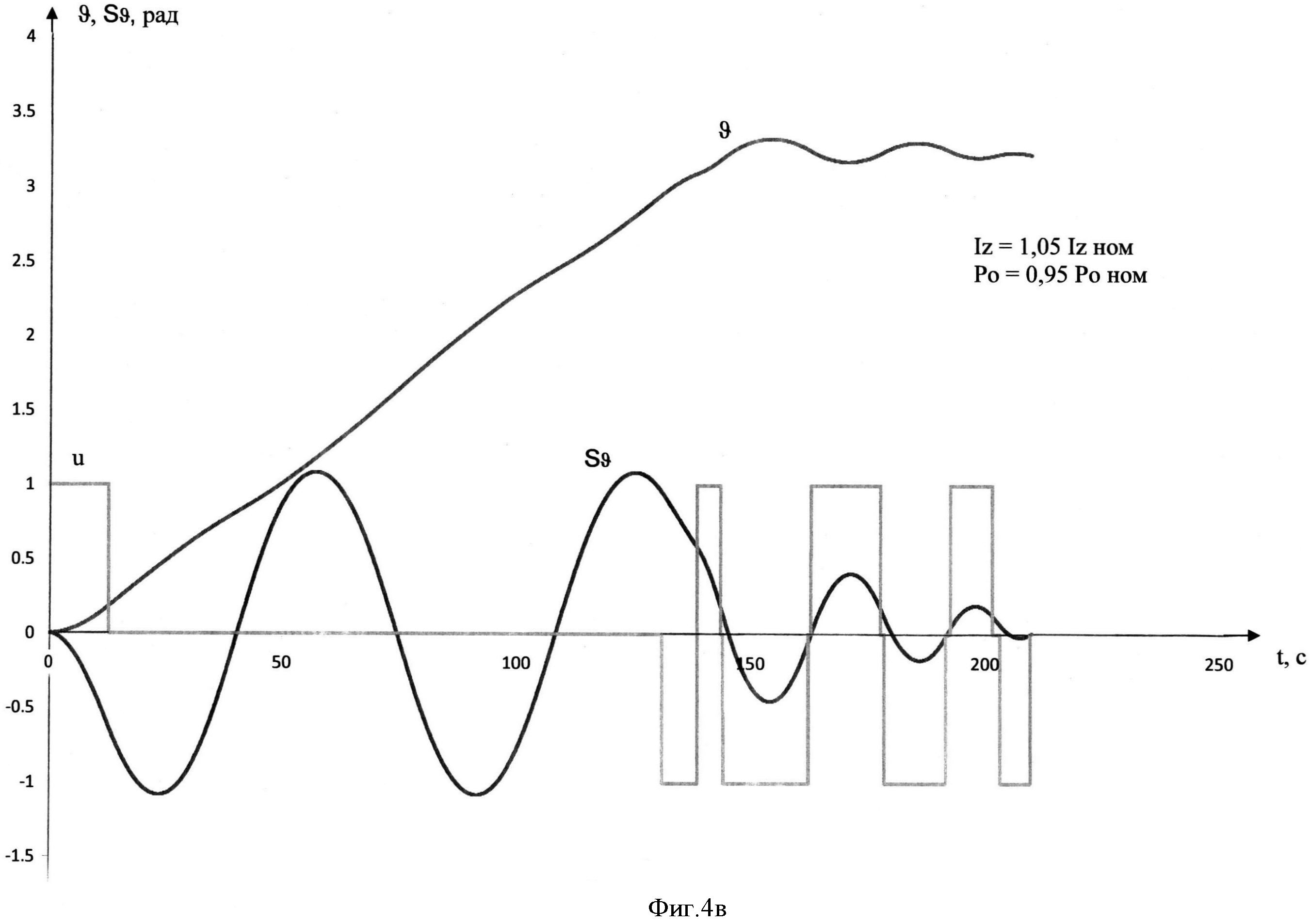
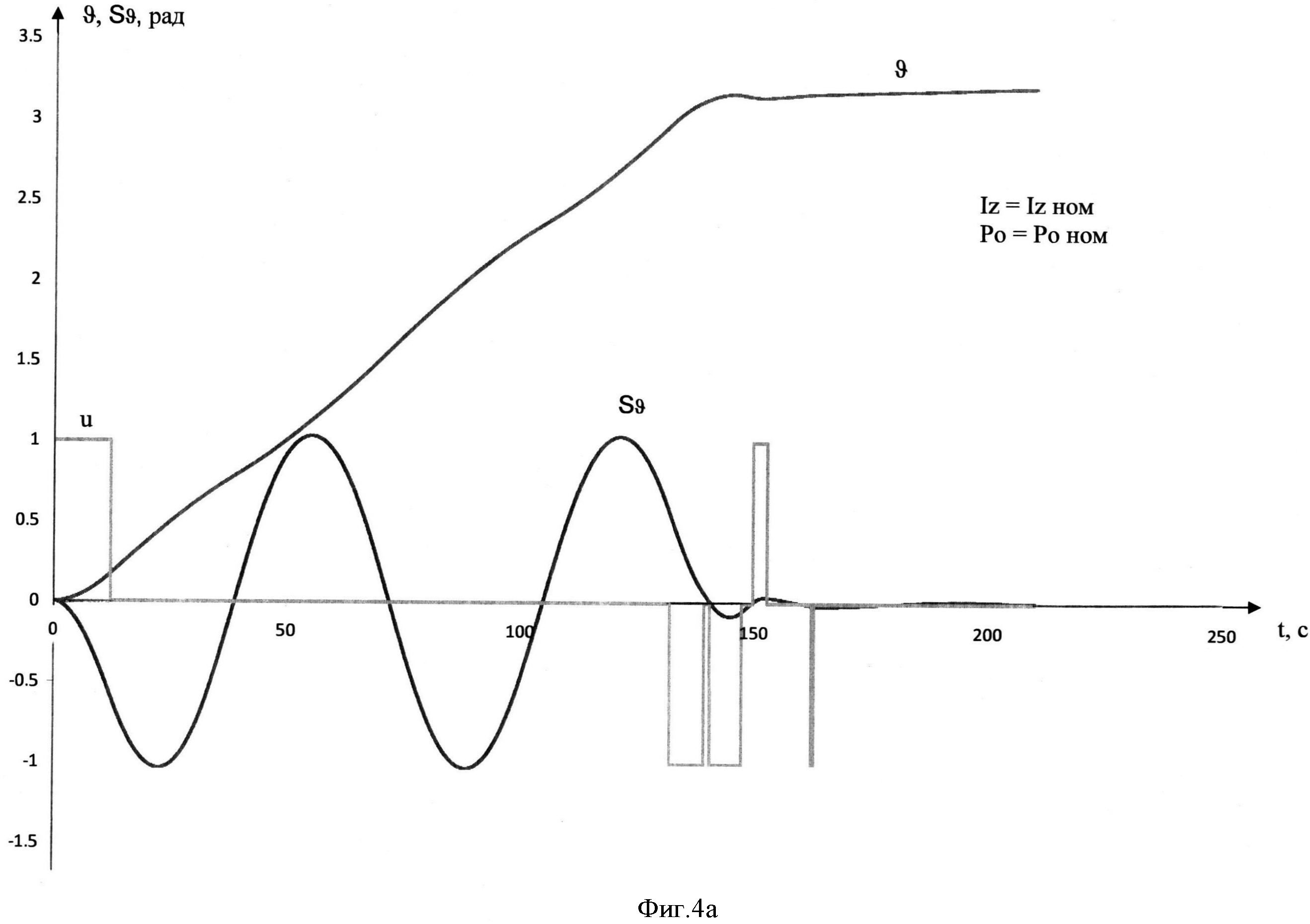
Фиг.4 - Типовые переходные процессы при реализации программного разворота в соответствии с предлагаемым способом управления.
Для управления программным разворотом, совмещенным по времени с работой двигателей поджатия, в математической модели объекта управления необходимо учесть колебания жидких компонентов топлива. В качестве примера рассмотрим математическую модель плоского разворота РБ по тангажу с использованием маятниковой модели, описывающей колебания окислителя в баке. Уравнения пространственного движения РБ как твердого тела с n математическими маятниками выведены в работе [2]. В рассматриваемом случае плоского разворота с одним маятником эти уравнения имеют вид (в предположении малости угла отклонения маятника от положения равновесия)


где
ϑ - угол тангажа РБ;
sϑ - угол отклонения маятника от продольной оси РБ, равный углу отклонения нормали к поверхности окислителя от продольной оси бака;
u - команда на включение управляющих двигателей РБ, принимающая значения - 1, 0, 1;


Здесь (см. фиг.1)
m0 - масса РБ без учета массы колеблющегося окислителя (масса твердого тела);
IZ - момент инерции твердого тела;
m - масса материальной точки математического маятника, равная массе колеблющегося окислителя;
P0 - тяга двигателей поджатия, направленная вдоль продольной оси РБ;
P - тяга одного двигателя ориентации, перпендикулярная продольной оси РБ;
d - расстояние от точки подвеса маятника до центра масс твердого тела;
l - длина нити математического маятника;
xT - продольная координата центра масс твердого тела в базовой системе координат;
xD - продольная координата точек приложения сил тяги управляющих двигателей в базовой системе координат.
Система уравнений (1)-(2) имеет следующие начальные и конечные условия


где ϑ0, ϑK - соответственно заданные начальное и конечное значения угла тангажа;
tK - время окончания разворота.
Перейдем к безразмерным переменным



где 
Систему уравнений (1)-(2) и граничные условия (5)-(6) можно представить в виде



где символы ' и “ означают соответственно первую и вторую производные по безразмерному времени τ, а 2Т - безразмерное время разворота.
Сохраняя известную по способу-прототипу последовательность операций при выполнении программного разворота (разгон, движение по инерции, торможение), выберем временную программу управления в виде, показанном на фиг.2. При этом система (14) за безразмерное время 2Т перейдет из начальных условий (11) в конечные условия, определяемые формулами

где σ=signx0. Чтобы обеспечить выполнение конечных условий (16), достаточно выбрать в качестве безразмерного времени Т одно из значений последовательности
где i=1, 2, 3,…, при этом
Минимальное безразмерное время разворота обеспечивается при  , где квадратные скобки обозначают целую часть числа. Однако при i=i* амплитуда переходного процесса по углу отклонения маятника, моделирующего колебания жидкости в баке, может достигнуть недопустимой величины. Для характерных значений параметров рассматриваемого в примере разгонного блока целесообразно выбрать значение i=2.
, где квадратные скобки обозначают целую часть числа. Однако при i=i* амплитуда переходного процесса по углу отклонения маятника, моделирующего колебания жидкости в баке, может достигнуть недопустимой величины. Для характерных значений параметров рассматриваемого в примере разгонного блока целесообразно выбрать значение i=2.
Полученные значения параметров T и ξ позволяют реализовать управление программным разворотом, показанное на фиг.2, как функцию времени. Однако для технической реализации целесообразно представить это же управление как функцию переменных состояния x и x', т.е. осуществить синтез управления с обратной связью. Наличие обратной связи, как известно, позволяет компенсировать влияние возмущений, связанных с влиянием внешних факторов, неточным знанием параметров объекта управления и регулятора, неучетом в математической модели второстепенных факторов и др. В предлагаемом способе управления программным разворотом разгонного блока как раз и используется принцип обратной связи. С этой целью были получены уравнения линий переключения в фазовой плоскости (x, x'). При этом отключение двигателя ориентации в конце участка разгона и включение противоположного двигателя ориентации в начале участка торможения осуществляются при достижении параметром x на фазовой плоскости соответственно первой и второй линий переключения (см. фиг.3). Уравнение первой линии переключения имеет вид (для характерных для рассматриваемого РБ значений безразмерного начального условия  )
)
 ,
,
а уравнение второй линии переключения
 .
.
Для реализации такого управления заранее перед полетом РБ вычисляют зависимости коэффициентов (13) линейных функций (8) и (9) от уровня h окислителя в баке. Для этого вначале расчетным путем или экспериментально определяют зависимости от h безразмерных параметров маятниковой модели поведения жидкости: квадрата безразмерной частоты колебаний маятника  , безразмерной массы материальной точки маятника
, безразмерной массы материальной точки маятника  , безразмерного расстояния от нижнего полюса бака до точки подвеса маятника
, безразмерного расстояния от нижнего полюса бака до точки подвеса маятника  [3]. По этим данным определяют длину нити маятника
[3]. По этим данным определяют длину нити маятника  , массу материальной точки маятника
, массу материальной точки маятника  и расстояние от точки подвеса маятника до центра масс твердого тела
и расстояние от точки подвеса маятника до центра масс твердого тела  , где R - характерный размер бака, ρ - плотность окислителя, xT-х0 - расстояние от центра масс твердого тела до нижнего полюса бака окислителя. Наконец, по формулам (3), (4), (13) определяют зависимости коэффициентов k, k1, k2 от уровня h окислителя в баке. Эти заранее рассчитанные зависимости используются в полете для определения значений коэффициентов. Для этого перед осуществлением программного разворота в соответствии с предлагаемым способом измеряют уровень h окислителя в баке.
, где R - характерный размер бака, ρ - плотность окислителя, xT-х0 - расстояние от центра масс твердого тела до нижнего полюса бака окислителя. Наконец, по формулам (3), (4), (13) определяют зависимости коэффициентов k, k1, k2 от уровня h окислителя в баке. Эти заранее рассчитанные зависимости используются в полете для определения значений коэффициентов. Для этого перед осуществлением программного разворота в соответствии с предлагаемым способом измеряют уровень h окислителя в баке.
Во время выполнения программного разворота периодически измеряют угол ϑ и угловую скорость  разворота разгонного блока, а также угол sϑ и угловую скорость
разворота разгонного блока, а также угол sϑ и угловую скорость  отклонения поверхности окислителя в баке от продольной оси разгонного блока, которые по формулам (8)-(10) пересчитываются в параметры управления x и x'. Измерение углов отклонения поверхности окислителя в баке в двух плоскостях можно осуществить, например, с использованием трех радиоволновых уровнемеров, расположенных на боковой стенке внутри цилиндрического бака под углами в 120°. В частности, могут использоваться уровнемеры «Микрорадар-216Н» [4], имеющие массу не более 3 кг и обеспечивающие измерение уровня жидкости в пределах от 0,5 м до 4 м с точностью ±2,5 мм и частотой выдачи измеренных значений уровня не менее 10 1/с. Угловая скорость отклонения поверхности окислителя в баке от продольной оси разгонного блока может быть получена численным дифференцированием измеренного угла отклонения.
отклонения поверхности окислителя в баке от продольной оси разгонного блока, которые по формулам (8)-(10) пересчитываются в параметры управления x и x'. Измерение углов отклонения поверхности окислителя в баке в двух плоскостях можно осуществить, например, с использованием трех радиоволновых уровнемеров, расположенных на боковой стенке внутри цилиндрического бака под углами в 120°. В частности, могут использоваться уровнемеры «Микрорадар-216Н» [4], имеющие массу не более 3 кг и обеспечивающие измерение уровня жидкости в пределах от 0,5 м до 4 м с точностью ±2,5 мм и частотой выдачи измеренных значений уровня не менее 10 1/с. Угловая скорость отклонения поверхности окислителя в баке от продольной оси разгонного блока может быть получена численным дифференцированием измеренного угла отклонения.
Результаты математического моделирования процесса управления программным разворотом с использованием предлагаемого способа, представленные на фиг.4 (а, б, в) показывают хорошее качество управления как при номинальных значениях характеристик разгонного блока (а), так и при 5%-ных разбросах на значения моментов инерции РБ и тяги двигателей поджатия (б, в).
Таким образом, благодаря реализации предложенного в изобретении технического решения, решается задача управления программным разворотом разгонного блока, обеспечивающего на участке работы двигателей поджатая выполнение разворота РБ на заданный угол без перерегулирования с одновременным гашением колебаний компонентов топлива в баках.
Источники информации
1. Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией космических аппаратов. М., «Наука», 1974 г., стр.191-194.
2. А.Ш. Альтшулер, В.А. Лобанов. Математические модели пространственных колебаний жидких компонентов топлива в баках ракеты космического назначения на активных участках полета. Авиакосмическая техника и технология. 2010 г., №2, стр.39-46.
3. К.С. Колесников. Динамика ракет. М. «Машиностроение», 2003 г.
4. Уровнемер радиоволновой «Микрорадар-21611» ТУ BY 190460725.003-2009. Руководство по эксплуатации РЭ216Н.000-06. http://www.microradartest.com, , market@microradar.com.
Способ управления программным разворотом разгонного блока с помощью неподвижных двигателей ориентации постоянной тяги, заключающийся в выполнении набора угловой скорости - разгоне, движении по инерции, уменьшении угловой скорости до нуля - торможении и импульсном включении двигателей ориентации при уменьшении угловой скорости ниже заданного уровня, отличающийся тем, что в случае осуществления программного разворота, совмещенного по времени с работой двигателей поджатия, перед разворотом измеряют уровень h наиболее влияющего на динамику разворота компонента топлива в баке, а в процессе разворота периодически измеряют рассогласование по углу Δϑ и угловую скорость разворота разгонного блока, угол s и угловую скорость отклонения поверхности указанного компонента топлива в баке от продольной оси разгонного блока, при этом выключение двигателей ориентации в конце участка разгона осуществляют при достижении параметром x значения ƒ(x'), включение двигателей ориентации в начале участка торможения осуществляют при достижении параметром x значения ƒ(x'), где ; функции переключения, а параметры x и x' задают в виде линейных функций измеренных углов и угловых скоростей x=k(kΔϑ+ks), с коэффициентами k, k, k, определяемыми по заранее рассчитанным зависимостям от уровня h компонента топлива в баке.

Переносной герметичный контейнер
Устройство для сварки трением с перемешиванием полых трубчатых изделий
Сопловой аппарат активной турбины
Способ получения восстановительного газа
Способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей
Способ управления программным разворотом разгонного блока
Способ автономной навигации для объекта космического назначения

