Результат интеллектуальной деятельности: Способ автономной навигации для объекта космического назначения
Вид РИД
Изобретение
Изобретение относится к ракетно-космической технике, а именно к способам автономной навигации для объектов космического назначения: ракет-носителей (РН), разгонных блоков (РБ) и космических аппаратов (КА). Под автономной навигацией понимается определение координат объекта, компонент вектора скорости, а также углов ориентации и угловых скоростей по результатам независимых от внешних источников информации измерений и вычислений на борту объекта. Предлагаемый способ может быть реализован в платформенной инерциальной навигационной системе (ИНС) с трехосной гиростабилизированной платформой (ГСП) карданного (рамочного) типа.
Известен способ автономного измерения векторов скорости и ускорения движущегося объекта по излучениям трех звезд (см. патент на изобретение RU 2331890 С2), который предусматривает в процессе полета автосопровождение звезд с помощью оптических устройств, принимающих излучения от выбранных звезд. Недостатком этого способа является зависимость возможности его применения от погодных условий, времени суток, состояния атмосферы и т.п. Кроме того, указанный способ не позволяет определить параметры углового движения объекта (углы ориентации и угловые скорости).
Наиболее близким к предлагаемому изобретению по своей технической сущности является выбранный в качестве прототипа способ автономной навигации для баллистических ракет, использующий платформенную инерциальную навигационную систему, основным элементом инерциального измерительного блока которой является трехосная гиростабилизированная платформа (см. Г.Н. Разоренов, Э.А. Бахрамов, Ю.Ф. Титов. Системы управления летательными аппаратами (баллистическими ракетами и их головными частями). М., «Машиностроение», 2003 г., стр. 189-193, 206-214). Этот способ заключается в периодическом измерении компонент вектора кажущегося ускорения  ракеты с помощью установленных на трехосной ГСП акселерометров, периодическом измерении углов поворота ГСП в осях подвеса внутренней, промежуточной и наружной рамок γ, ψ, ϑ соответственно, периодическом вычислении компонент вектора гравитационного ускорения
ракеты с помощью установленных на трехосной ГСП акселерометров, периодическом измерении углов поворота ГСП в осях подвеса внутренней, промежуточной и наружной рамок γ, ψ, ϑ соответственно, периодическом вычислении компонент вектора гравитационного ускорения  с использованием математической модели гравитационного поля Земли и вычислении компонент вектора скорости движения центра масс ракеты
с использованием математической модели гравитационного поля Земли и вычислении компонент вектора скорости движения центра масс ракеты  и компонент радиус-вектора центра масс
и компонент радиус-вектора центра масс  путем соответственно одинарного и двойного интегрирования по времени компонент вектора полного ускорения
путем соответственно одинарного и двойного интегрирования по времени компонент вектора полного ускорения  ракеты, равного сумме векторов кажущегося и гравитационного ускорения, с заранее определенными на момент старта ракеты t0 начальными условиями.
ракеты, равного сумме векторов кажущегося и гравитационного ускорения, с заранее определенными на момент старта ракеты t0 начальными условиями.
Недостатком известного способа является потеря точности получаемой информации при выполнении объектом угловых маневров, при которых промежуточная и наружная рамки ГСП оказываются существенно неперпендикулярными (т.н. явление «складывания» рамок). Обычно максимальный по абсолютной величине допустимый угол между промежуточной рамкой и нормалью к наружной рамке ГСП составляет |ψ|=40°…45°. Это ограничение на угол между рамками реализовано в ГСП конструктивно, при его достижении ГСП перестает поддерживать зафиксированную на момент старта РН инерциальную начальную стартовую систему координат (НССК). На участках работы двигателей II и III ступеней, когда угол тангажа ракеты не превышает 20°…25°, указанное ограничение на угол между рамками ГСП фактически является ограничением на угол крена РН. В то же время ряд нерасчетных внешних возмущений (дополнительные угловые скорости приобретаемые при разделении ступеней, при остановке роторов турбонасосных агрегатов, упругие деформации конструкции при выключении двигателей и др.) приводят к «накоплению» нежелательного угла крена, который устраняется системой управления (СУ). При неблагоприятном совместном действии возмущающих факторов возможно достижение абсолютной величиной угла ψ между промежуточной рамкой и нормалью к наружной рамке ГСП предельно-допустимого значения. В этом случае система стабилизации ГСП будет после некоторого переходного процесса сохранять неизменной ориентацию осей чувствительности акселерометров в инерциальной системе координат (ИСК), но эта новая инерциальная система координат в общем случае не будет совпадать с исходной НССК, которую «поддерживала» ГСП до момента достижения ограничения. Акселерометры начнут выдавать компоненты вектора кажущегося ускорения в новой ИСК. Вычисленные после одинарного и двойного интегрирования компоненты вектора скорости и радиус-вектора центра масс объекта в НССК будут ошибочными. В практике космической деятельности известен случай, когда из-за «сложения» рамок ГСП и получения вследствие этого системой управления (СУ) РБ «Бриз-М» неверной навигационно-измерительной информации был фактически утрачен космический аппарат «Экспресс-АМ4», который был выведен на нерасчетную орбиту (Новости космонавтики, №10 (345), 2011 г., стр. 39). Запасов топлива на этом КА было недостаточно для перевода его на заданную орбиту.
В настоящее время существует большое количество объектов ракетно-космической техники, использующих в качестве основного измерительного блока гиростабилизированную платформу, для которых получение точной информации системой управления в процессе выполнения угловых маневров является актуальным.
Задачей предлагаемого изобретения является разработка способа автономной навигации для СУ движением объекта, обеспечивающего коррекцию ошибок ИНС при достижении абсолютной величиной угла ψ между промежуточной рамкой и нормалью к наружной рамке ГСП предельно-допустимого (соответствующего явлению «складывания»
рамок) значения из-за действия нерасчетных возмущений.
Техническим результатом предлагаемого изобретения является повышение «живучести» объекта, т.е. повышение вероятности успешного завершения полета при возникновении описанной выше нештатной ситуации.
Указанный технический результат достигается тем, что в способе автономной навигации для объекта космического назначения, заключающемся в периодическом измерении компонент вектора кажущегося ускорения  объекта с помощью установленных на трехосной гиростабилизированной платформе акселерометров, периодическом измерении углов поворота гиростабилизированной платформы в осях подвеса ее внутренней, промежуточной и наружной рамок γ, ψ, ϑ соответственно, периодическом вычислении компонент вектора гравитационного ускорения
объекта с помощью установленных на трехосной гиростабилизированной платформе акселерометров, периодическом измерении углов поворота гиростабилизированной платформы в осях подвеса ее внутренней, промежуточной и наружной рамок γ, ψ, ϑ соответственно, периодическом вычислении компонент вектора гравитационного ускорения  с использованием математической модели гравитационного поля Земли и вычислении компонент вектора скорости движения центра масс объекта
с использованием математической модели гравитационного поля Земли и вычислении компонент вектора скорости движения центра масс объекта  и компонент радиус-вектора центра масс
и компонент радиус-вектора центра масс  путем соответственно одинарного и двойного интегрирования по времени компонент вектора полного ускорения
путем соответственно одинарного и двойного интегрирования по времени компонент вектора полного ускорения  объекта с заранее определенными на момент старта РН t0 начальными условиями, в соответствии с изобретением, дополнительно периодически измеряют компоненты вектора угловой скорости объекта
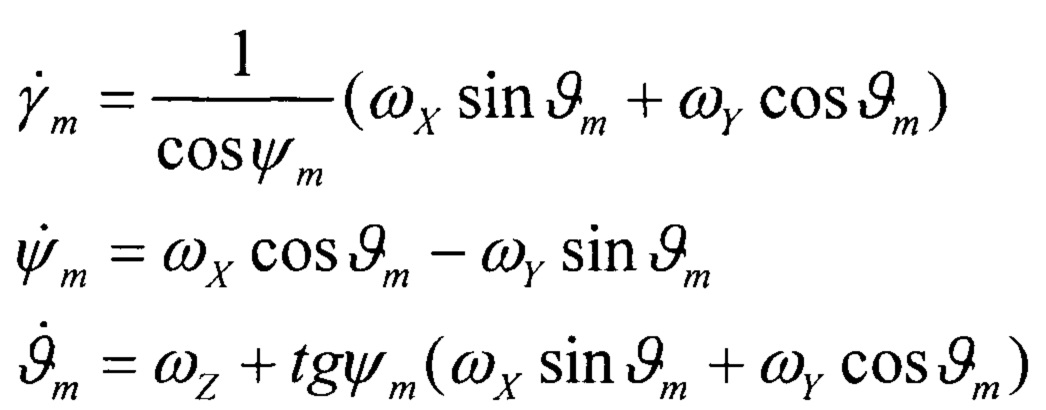
объекта с заранее определенными на момент старта РН t0 начальными условиями, в соответствии с изобретением, дополнительно периодически измеряют компоненты вектора угловой скорости объекта  с помощью датчиков угловых скоростей, периодически сравнивают абсолютную величину измеренного угла поворота гиростабилизированной платформы в оси поворота ее промежуточной рамки |ψ| с предельно-допустимым, соответствующим явлению «складывания» рамок, значением, и в случае достижения величиной |ψ| предельно-допустимого значения в момент времени t1, начиная с этого момента времени, численно интегрируют систему кинематических уравнений углового движения объекта
с помощью датчиков угловых скоростей, периодически сравнивают абсолютную величину измеренного угла поворота гиростабилизированной платформы в оси поворота ее промежуточной рамки |ψ| с предельно-допустимым, соответствующим явлению «складывания» рамок, значением, и в случае достижения величиной |ψ| предельно-допустимого значения в момент времени t1, начиная с этого момента времени, численно интегрируют систему кинематических уравнений углового движения объекта

с начальными условиями
ад)
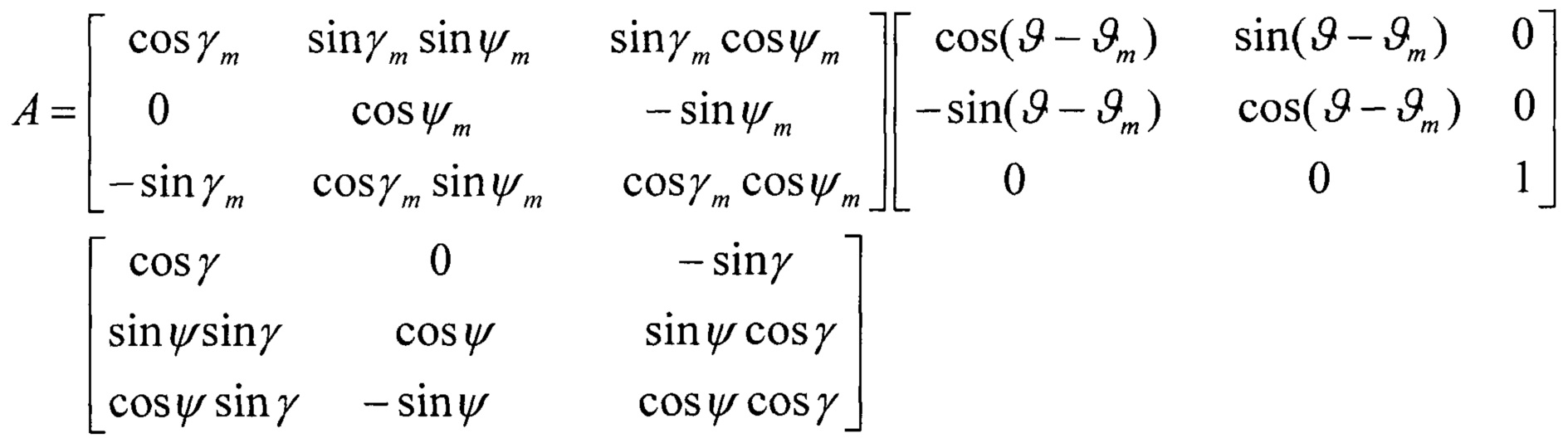
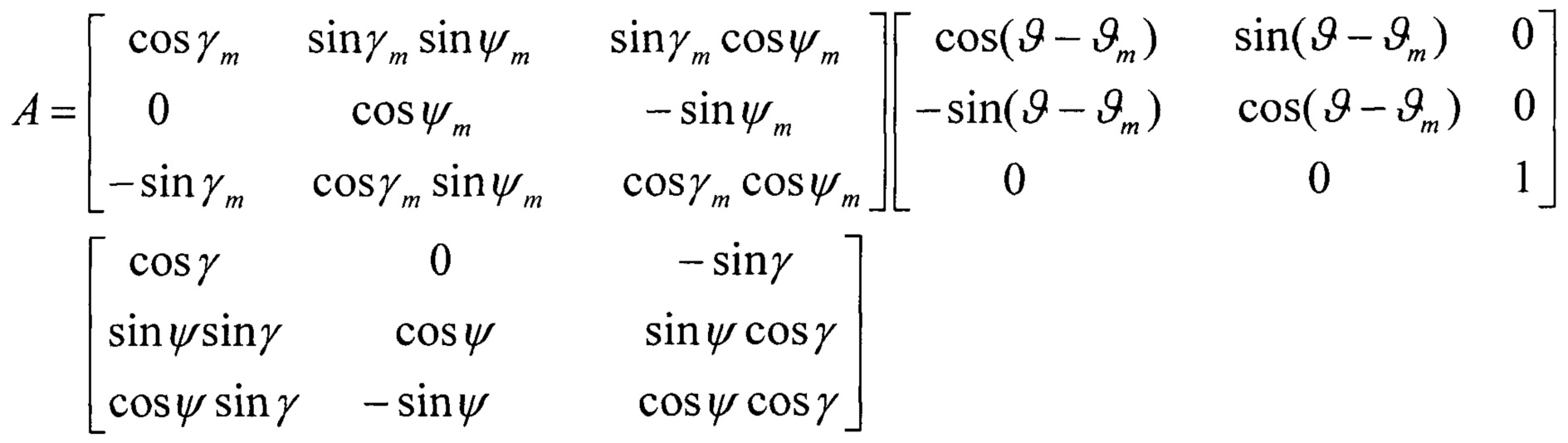
а вектор полного ускорения вычисляют по формуле
 , где А - матрица, имеющая вид
, где А - матрица, имеющая вид

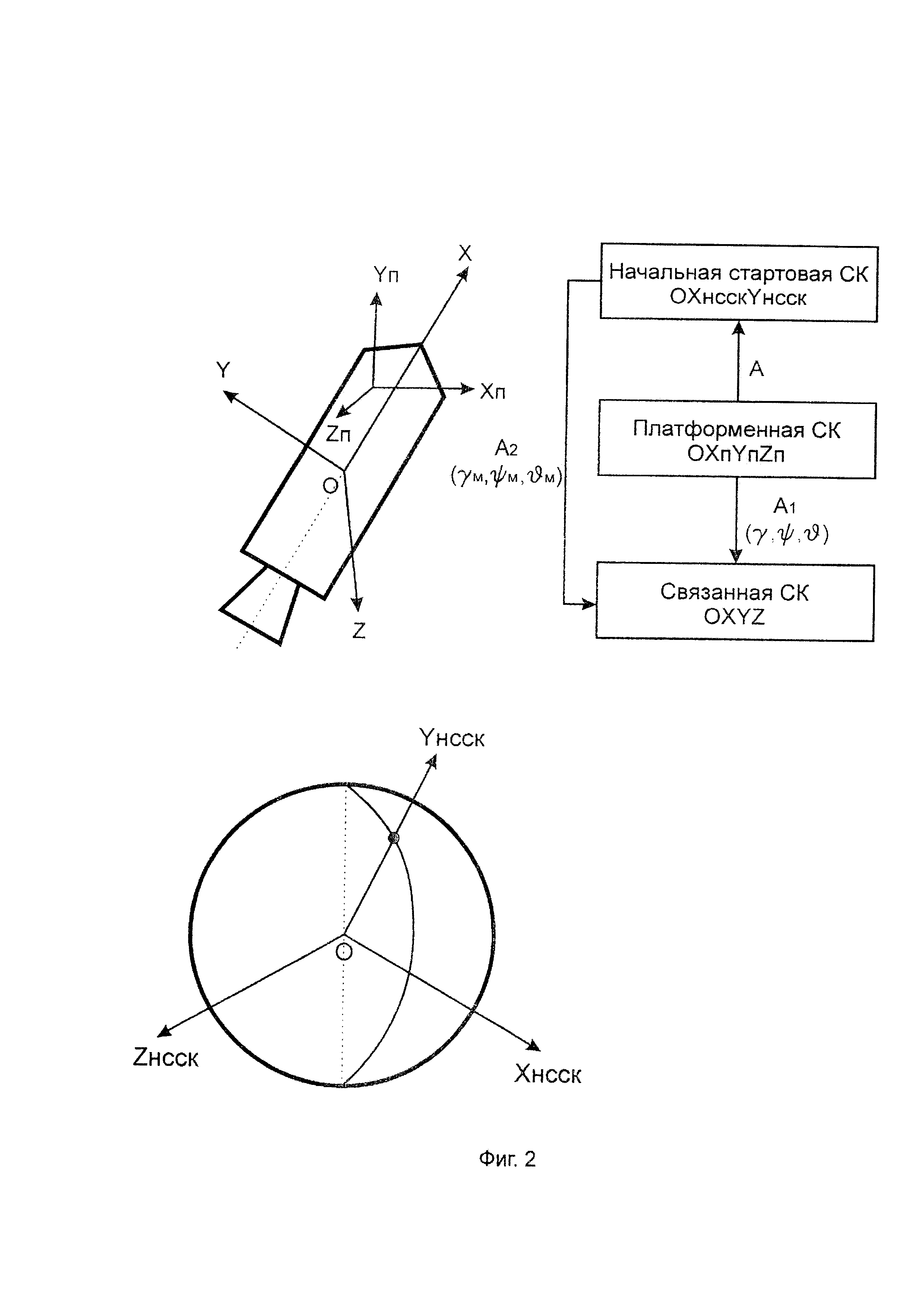
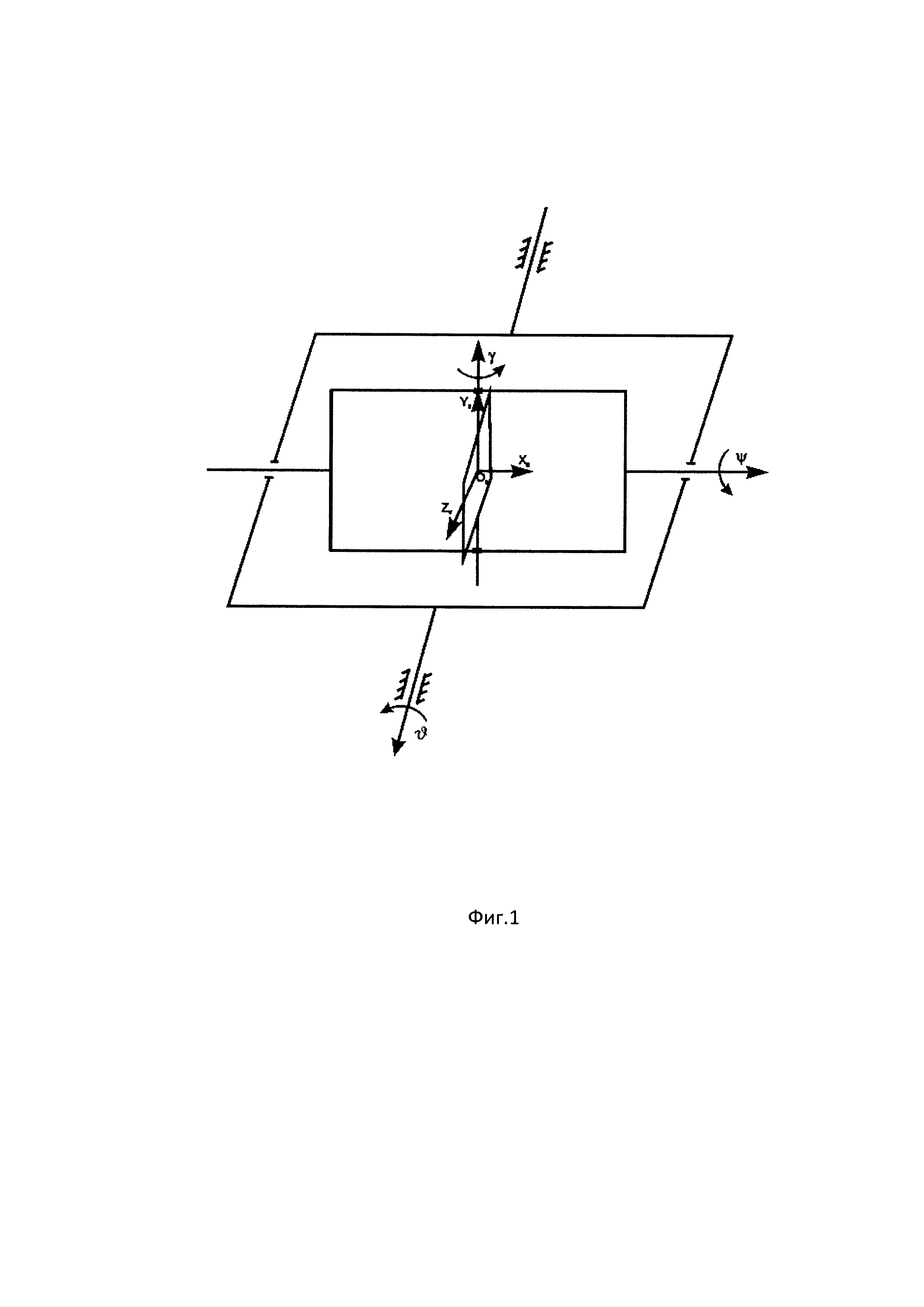
Сущность предлагаемого изобретения иллюстрируется фиг.1, 2.
Фиг. 1. Схема расположения рамок ГСП.
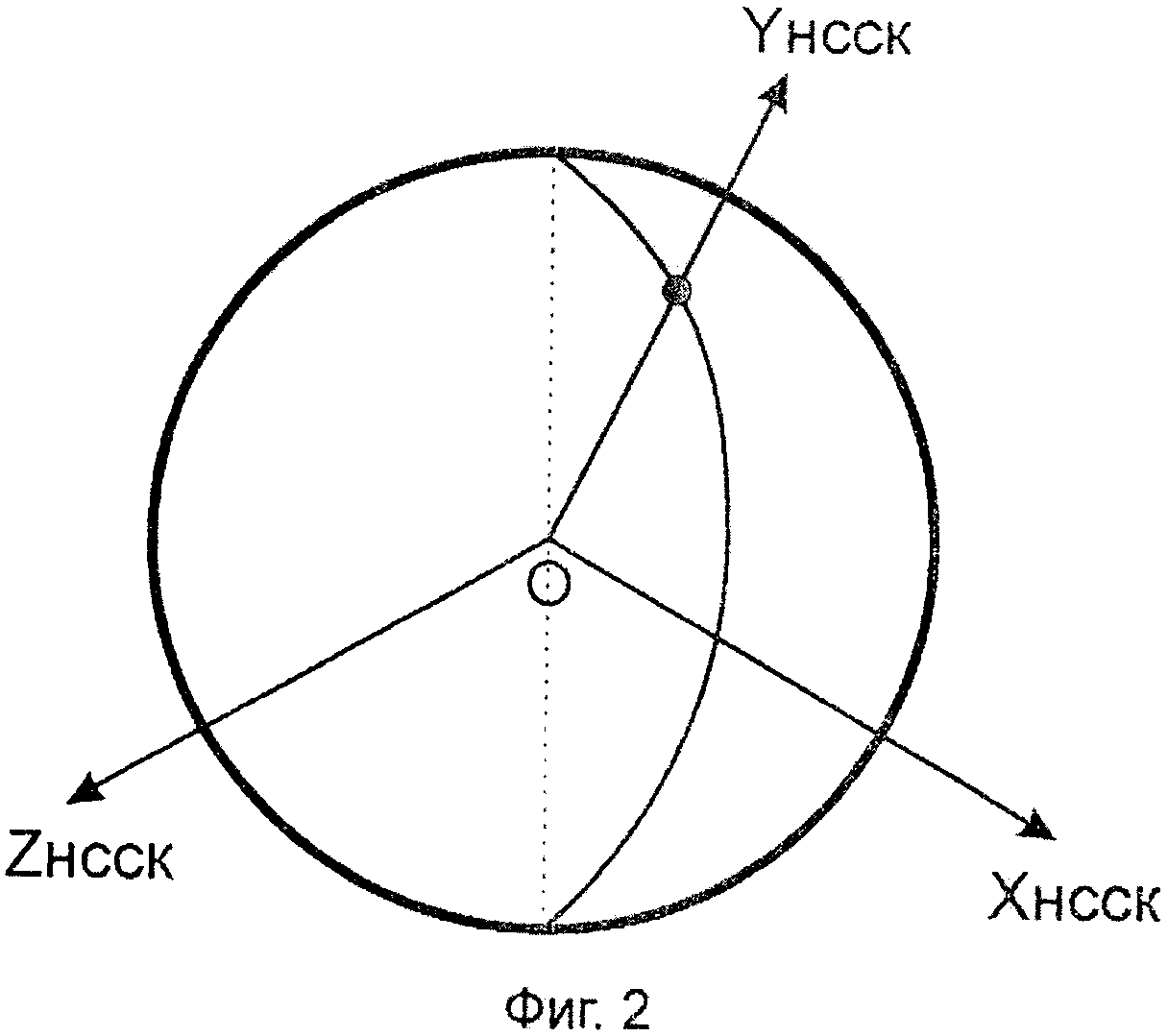
Фиг. 2. Схема связи между системами координат. Способ осуществляется следующим образом.
В случае штатной работы ГСП угол между промежуточной рамкой и нормалью к внешней рамке не превосходит по абсолютной величине
максимально - допустимое значение: |ψ|<ψmax. При этом СУ периодически получает от ГСП измеренные значения трех углов поворота ГСП в осях подвеса рамок γ, ψ, ϑ. Здесь γ - угол поворота внутренней рамки с установленными на ней акселерометрами относительно плоскости промежуточной рамки, ψ - угол между промежуточной рамкой и нормалью к наружной рамке ГСП, ϑ - угол между плоскостью наружной рамки и продольной осью объекта. Свяжем с внутренней рамкой ГСП платформенную систему координат (СК) - OXnYnZn (см. фиг. 1.) Перед стартом РН оси платформенной СК выставляют параллельно соответствующим осям НССК. Так как при нормальной работе ГСП внутренняя рамка сохраняет неизменное положение в инерциальном пространстве, то в течение дальнейшего полета направления соответствующих осей НССК и платформенной СК совпадают.
Углы γ, ψ, ϑ в случае штатной работы ГСП характеризуют ориентацию объекта относительно платформенной СК (а также НССК). При этом матрица преобразования платформенной СК (а также НССК) в связанную с объектом СК имеет вид:

а углы γ, ψ, ϑ подчиняются системе уравнений Эйлера

с начальными условиями на момент старта РН
γ(0)=γ0; ψ(0)=0; ϑ(0)=90°, где ωХ, ωY, ωZ - проекции вектора угловой скорости ракеты на оси связанной СК, γ0 - угол установки РН на стартовом столе по отношению к плоскости пуска РН.
В случае штатной работы ГСП установленные на ней акселерометры измеряют проекции вектора кажущегося ускорения  на оси НССК. СУ с использованием математической модели гравитационного поля Земли периодически вычисляет проекции вектора гравитационного ускорения
на оси НССК. СУ с использованием математической модели гравитационного поля Земли периодически вычисляет проекции вектора гравитационного ускорения  на оси НССК и проекции вектора полного ускорения, равного сумме векторов
на оси НССК и проекции вектора полного ускорения, равного сумме векторов  Компоненты вектора скорости объекта
Компоненты вектора скорости объекта  вычисляются системой управления путем однократного интегрирования по времени соответствующих компонент вектора полного ускорения, а координаты РН (компоненты радиус-вектора центра масс) в НССК - путем двойного интегрирования. Начальные условия для интегрирования на момент времени старта t0 определяются и вводятся в СУ заранее.
вычисляются системой управления путем однократного интегрирования по времени соответствующих компонент вектора полного ускорения, а координаты РН (компоненты радиус-вектора центра масс) в НССК - путем двойного интегрирования. Начальные условия для интегрирования на момент времени старта t0 определяются и вводятся в СУ заранее.
Кроме измерения углов γ, ψ, ϑ с помощью ГСП и компонент вектора кажущегося ускорения  с помощью акселерометров, на борту объекта дополнительно периодически измеряются компоненты вектора угловой скорости
с помощью акселерометров, на борту объекта дополнительно периодически измеряются компоненты вектора угловой скорости  в связанной СК с помощью имеющихся на объекте датчиков угловых скоростей.
в связанной СК с помощью имеющихся на объекте датчиков угловых скоростей.
В случае наступления нештатной ситуации, когда из-за действия
нерасчетных возмущений в некоторый момент времени t1 абсолютная величина угла |ψ| достигнет значения ψmax, что соответствует явлению «складывания» рамок, СУ начинает процесс численного интегрирования в реальном времени системы дифференциальных кинематических уравнений углового движения ракеты, которые имеют вид (1). В этой системе уравнений параметрами, характеризующими угловое движение объекта, являются «модельные» значения углов γm, ψm, ϑm, которые имеют такой же физический смысл, как и углы γ, ψ, ϑ. Начальными условиями при численном интегрировании для углов γm, ψm, ϑm являются соответственно значения углов γm, ψm, ϑm в момент времени t1, когда |ψ| достигнет значения ψmax. Начиная с этого момента времени, углы γm, ψm, ϑm, которые теперь описывают ориентацию объекта относительно НССК, будут использоваться СУ для управления угловым движением объекта вместо соответственно углов γ, ψ, ϑ, которые по-прежнему описывают ориентацию объекта относительно платформенной СК, однако направления осей платформенной СК теперь уже, вообще говоря, не совпадают с направлением соответствующих осей НССК. Установленные на внутренней рамке ГСП акселерометры измеряют компоненты вектора кажущегося ускорения в платформенной СК. Для нормальной работы системы управления вычисляются компоненты этого вектора в НССК. Связь между компонентами вектора
в платформенной СК. Для нормальной работы системы управления вычисляются компоненты этого вектора в НССК. Связь между компонентами вектора  в платформенной СК
в платформенной СК  выражается формулой
выражается формулой  где матрица
где матрица  (см. фиг. 2), А1 - матрица преобразования платформенной СК в связанную, имеющая вид (3), А2 - матрица преобразования НССК в связанную, имеющая вид
(см. фиг. 2), А1 - матрица преобразования платформенной СК в связанную, имеющая вид (3), А2 - матрица преобразования НССК в связанную, имеющая вид

Подставляя выражения (3) и (5) в формулу для вычисления матрицы А, получим выражение (2). При этом вектор полного ускорения  равен
равен 
В предлагаемом способе автономной навигации поступающая с ГСП, акселерометров и датчиков угловых скоростей информация обрабатывается бортовой центральной вычислительной машиной (БЦВМ) объекта программным путем по алгоритмам, описанным выше.
Отметим, что используемые в данном способе датчики угловых скоростей имеются в составе систем управления большинства отечественных объектов космического назначения (например, РН «Протон» и РН семейства «Ангара»).
Таким образом, при использовании предлагаемого способа автономной навигации достигается технический результат: повышение «живучести» объекта космического назначения в случае возникновения нештатной ситуации с ГСП путем коррекции ошибок ИНС, что позволяет продолжить процесс выведения объекта на целевую орбиту.













Состав для получения теплозащитного покрытия
Способ наполнения емкостей сжатым газом до требуемого давления и устройство для его реализации
Способ снижения погрешности измерения температуры электрическим мостом
Устройство для создания пульсирующего давления
Устройство для создания пульсирующего давления
Способ измерения температуры
Способ подавления упругих колебаний конструкции ракеты пакетной схемы
Способ управления угловым движением ракеты космического назначения
Способ бортового контроля для аварийного прекращения полета ракеты
Способ выведения на орбиту ракеты космического назначения пакетной схемы на участке полета до отделения боковых блоков
Ракета-носитель
Многоразовый возвращаемый ракетный блок
Способ управления движением ракеты-носителя на начальном участке полета
Способ защиты от аварии многоканальных систем управления ракет
Способ управления запуском жидкостных реактивных двигателей ракеты космического назначения
Способ управления программным разворотом разгонного блока

