Результат интеллектуальной деятельности: СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ
Вид РИД
Изобретение
Изобретение относится к области военной техники и может быть использовано для наведения управляемых ракет.
Известны ручные системы наведения управляемых ракет (см. например, книгу А.Н. Латухина "Противотанковое вооружение", М., Воениздат, МО СССР, 1974, С.192-218). Они содержат привод управления, пусковую установку, прицел, блоки выработки управляющих сигналов и команд, линию передачи команд, выход которой соединен с аппаратурой управления управляемой ракетой.
Данная система наведения обладает следующими недостатками: маршевая скорость управляемой ракеты не превышает 80-100 м/сек, что приводит к большому времени полета (20-25 сек), малая скорострельность, наличие непоражаемой зоны перед огневой позицией глубиной 300-600 м.
Кроме того, обучение личного состава правилам стрельбы и практическим навыкам слишком дорого и сложно, так как ручное управление требует строгого отбора и тщательного обучения операторов.
Известна система наведения управляемых ракет (см. например, А.Н. Латухин. "Противотанковое вооружение". М., Воениздат, МО СССР, 1974, с.208-235). Эта система содержит привод управления, пусковую установку и прицел, входы которых соединены с выходом привода управления, а также последовательно соединенные координатор управляемой ракеты, вход которого оптически сопряжен с полем зрения прицела, блок выработки управляющих сигналов и блок выработки управляющих команд, выход которого через линию передачи команд соединен с аппаратурой управления управляемой ракетой.
Данная система наведения обладает следующим недостатками: не учитывается воздействие на ракету внешних возмущений, например, силы поперечного (вертикального и горизонтального) ветра и др., наведение происходит с ошибками, что существенно снижает его точность.
Компенсация силы поперечного ветра ни в современных, ни в перспективных системах наведения не предусмотрена. Вместе с тем известно, что на равнинной и пустынной местности точность стрельбы всеми типами снарядов (в том числе и управляемыми ракетами) может существенно изменяться. Это объясняется тем, что в указанных районах возникают мощные воздушные потоки, отклоняющие управляемую ракету в полете по высоте и направлению от точки прицеливания. Это отклонение может быть определено по выражению (см. например, Ф.К. Неупокоев "Стрельба зенитными ракетами", М., Воениздат, 1970, С.200-202):
 ,
,
где αcosθ - нормальная к траектории составляющая ускорения силы воздушного потока, k0 - коэффициент усиления разомкнутого контура управления.
В результате действия потоков воздуха отклонение ракеты может быть существенным, а вероятность попадания уменьшаться на 10-15%.
Наиболее близким к изобретению является система наведения управляемых ракет (см. например, Анцев Г.В., Турнецкий Л.С., патент РФ на изобретение №2267318 от 27.12.2005 г,), которая содержит привод управления, пусковую установку и прицел, систему наведения управляемых ракет, содержащую привод управления пусковую установку и прицел, входы которых соединены с выходом привода управления, и последовательно соединенные координатор управляемой ракеты, вход которого оптически сопряжен с полем зрения прицела, блок выработки управляющих сигналов и блок выработки управляющих команд выход, которого через линию передачи команд соединен с аппаратурой управления управляемой ракетой, сумматор, включенный между блоком выработки управляющих сигналов и блоком выработки управляющих команд, последовательно соединенные ключ, вход которого подключен ко второму выходу координатора, датчик скорости воздушного потока, кинематически связанный с пусковой установкой, квадратор, масштабирующий блок и инвертор, выход которого соединен с третьим входом сумматора, а также блок стабилизации траектории управляемой ракеты, вход которого соединен с третьим выходом координатора, а выход - со вторым входом сумматора.
Недостатком данной системы наведения управляемых ракет, является отсутствие возможности наблюдения за динамикой изменения скорости воздушного потока и соответственно внесение корректирующего сигнала в процесс управления ракетой.
В зависимости от погодных условий возможны резкие порывы ветра, при этом не учет динамической составляющей ветра приведет к увеличению ошибки наведения ракет.
Целью настоящего изобретения является повышение эффективности стрельбы управляемыми ракетами путем повышения точности их наведения на цель, за счет учета направления и знака изменений направлений движений воздушного потока.
Указанная цель достигается тем, что в систему наведения управляемых ракет, содержащую привод управления пусковую установку и прицел, входы которых соединены с выходом привода управления, и последовательно соединенные координатор управляемой ракеты, вход которого оптически сопряжен с полем зрения прицела, блок выработки управляющих сигналов и блок выработки управляющих команд, выход которого через линию передачи команд соединен с аппаратурой управления управляемой ракетой, сумматор, включенный между блоком выработки управляющих сигналов и блоком выработки управляющих команд, последовательно соединенные ключ, вход которого подключен ко второму выходу координатора, датчик скорости воздушного потока, кинематически связанный с пусковой установкой, квадратор, масштабирующий блок и инвертор, выход которого соединен с третьим входом сумматора, а также блок стабилизации траектории управляемой ракеты, вход которого соединен с третьим выходом координатора, а выход - со вторым входом сумматора, отличающееся тем, что введены датчик углового положения, блок определения углового положения воздушного потока, блок определения знака направления движения воздушного потока, причем датчик углового положения выполнен в виде флюгера, чувствительные элементы датчика выполнены в виде элементов фотоприемников которые равномерно размещены на основании флюгера, на вращающей части флюгера размещена стрелка, которая является указателем положения флюгера относительно основания выполненного в виде круга, выходы датчика углового положения соединены с входами блока определения углового положения воздушного потока, выход которого соединен с четвертым входом сумматора, кроме того вход блока определения знака направления движения воздушного потока бесконтактно соединен с флюгером датчика углового положения, выход которого соединен с пятым входом сумматора, блок определения углового положения воздушного потока, содержит n-элементов НЕ, n-дешифраторов, элемент ИЛИ, причем входами блока определения углового положения воздушного потока являются входы n-элементов НЕ, выходы которых соединены с входами n-дешифраторов, выходы которых соединены с входами элемента ИЛИ, выход которого является выходом блока определения углового положения воздушного потока.
Кроме того, блок определения знака направления движения потока воздуха содержит последовательно соединенные приемно-передающую антенну, переключатель приемо-передачи, первый смеситель, усилитель промежуточной частоты и детектор, задающий генератор, первый выход которого соединен с первым входом усилителя мощности, второй вход которого соединен с выходом импульсного модулятора, а выход соединен со вторым входом переключателя приемо-передачи, второй выход задающего генератора через второй смеситель соединен со вторым входом первого смесителя, генератор промежуточной частоты, первый выход которого соединен со вторым входом второго смесителя, индикатор, последовательно соединенные генератор модуляции промежуточной частоты и модулятор промежуточной частоты, второй вход которого подключен ко второму выходу генератора промежуточной частоты, а выход подключен ко второму входу детектора, последовательно соединенные фильтр доплеровских частот, вход которого соединен с выходом детектора, частотный демодулятор, определитель временного изменения частоты сигнала и коррелятор изменения частоты сигнала, второй вход которого подключен к выходу генератора модуляции промежуточной частоты, а выход подключен к индикатору.
Введение новых элементов и связей позволяет получить новую информацию об условиях стрельбы (направление и знак изменения воздушного потока), определить и ввести необходимые компенсирующие поправки, что обеспечивает повышение точности наведения управляемой ракеты.
На фиг.1 приведена структурная схема системы наведения управляемых ракет, где 1 - цель (Ц), 2 - привод управления (ПУ), 3 - прицел (Пр), 4 - управляемая ракета (УР), 5 - пусковая установка (ПУс), 6 - линия передачи команд (ЛПК), 7 - координатор (К), 8 - блок выработки управляющих сигналов (БВС), 9 - сумматор ("+"), 10 - блок выработки управляющих команд (БВК), 11 - ключ (Кл), 12 - блок стабилизации траектории управляемой ракеты (БСТ), 13 - датчик скорости воздушного потока (ДВП), 14 - квадратор (KB), 15 - масштабирующий блок (МБ), 16 - инвертор (Ив), 17 - датчик углового положения воздушного потока, 18 элементы фотоприемников, 19 - блок определения углового положения воздушного потока, 20 - блок определения знака направления движения воздушного потока.
На фиг.2 приведен общий вид датчика углового положения воздушного потока.
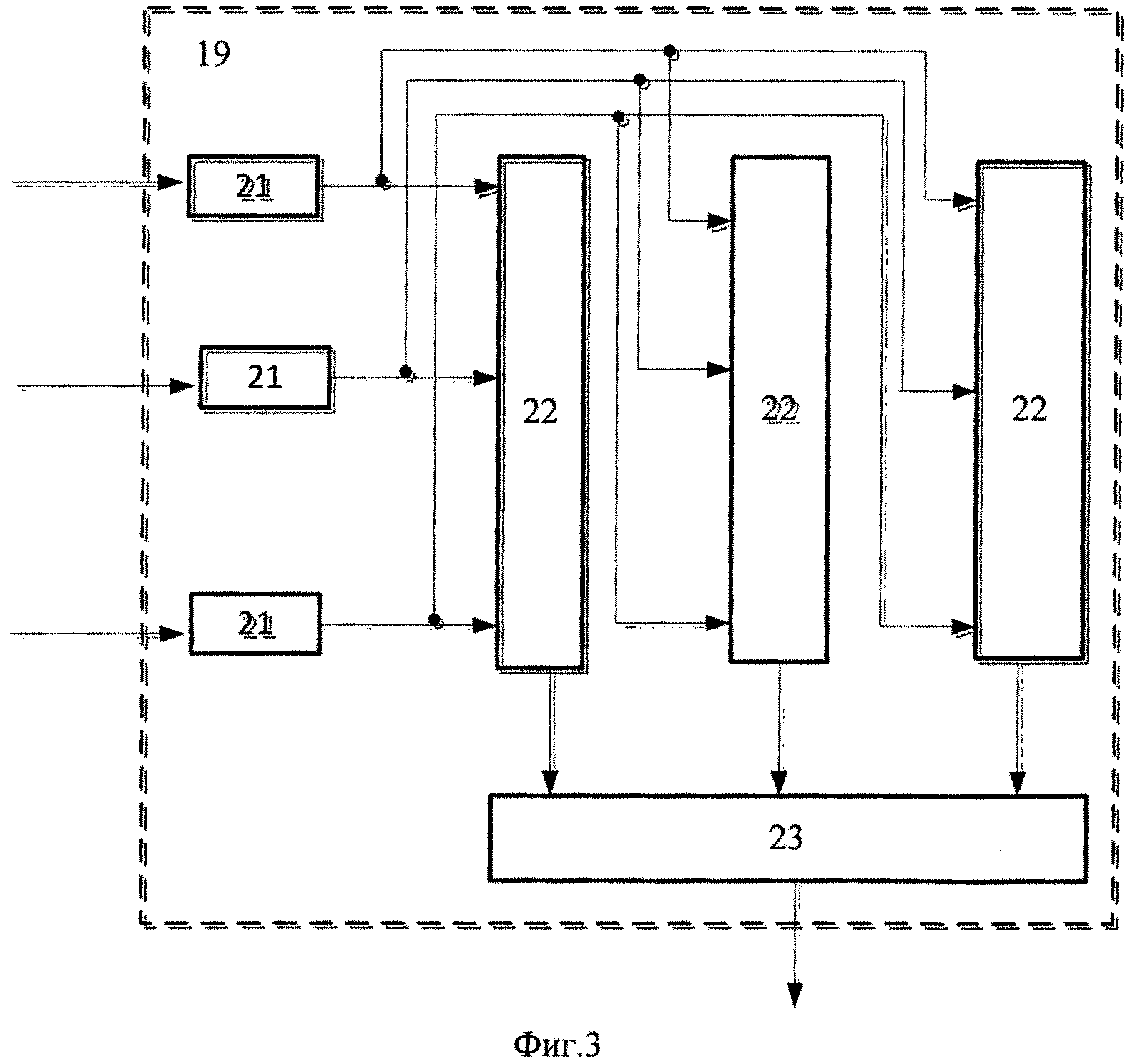
На фиг.3 - структурная схема блока 19 определения углового положения воздушного потока, где 21 - элементы НЕ, 22 - n-дешифраторы, 23 - элемент ИЛИ.
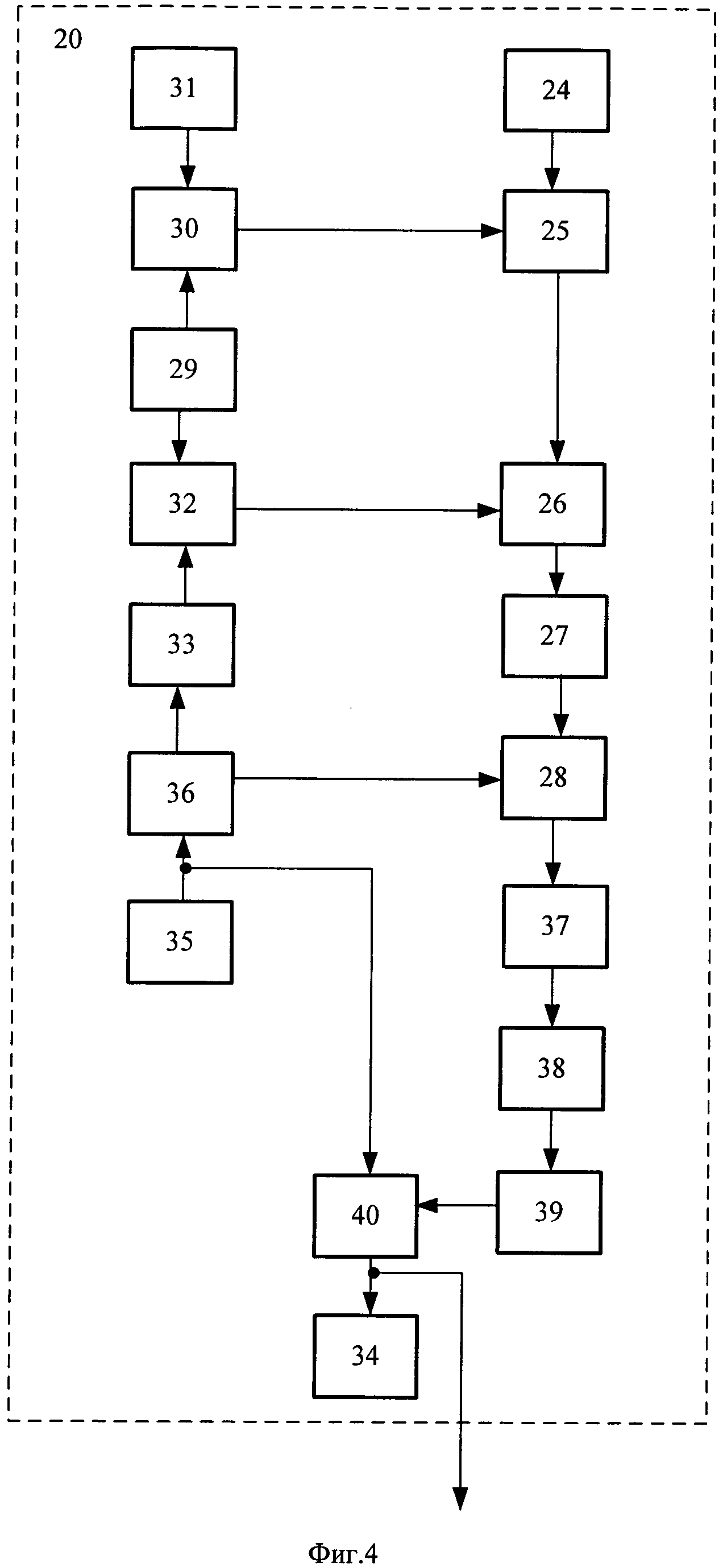
На фиг.4 - структурная схема блока определения знака направления движения воздушного потока, где 24 - приемно-передающая антенна, 25 - переключатель приемо-передачи, 26 - первый смеситель, 27 - усилитель промежуточной частоты, 28 - детектор, 29 - задающий генератор, 30 - усилитель мощности, 31 - импульсный модулятор, 32 - второй смеситель, 33 - генератор промежуточной частоты, 34 - индикатор, 35 - генератор модуляции промежуточной частоты, 36 - модулятор промежуточной частоты, 37 - фильтр доплеровских частот, 38 - частотный демодулятор, 39 - определитель временного изменения частоты сигнала, 40 - коррелятор изменения частоты сигнала.
На фиг.5 представлены спектры сигналов, действующих в устройстве, поясняющие процесс определения знака направления движения для приближающего воздушного потока, где:
а - огибающая спектра излученного сигнала на промежуточной частоте;
б - огибающая спектра сигнала, принятого от приближающего воздушного потока, на промежуточной частоте;
в - амплитудно-частотная характеристика фильтра доплеровских частот 37;
г - временная зависимость частоты первой гармоники сигнала равномерно приближающего воздушного потока;
д - временная зависимость частоты опорного сигнала на втором входе детектора 28, поступающего с выхода модулятора промежуточной частоты 36;
е - временная зависимость разностной частоты первой гармоники сигнала равномерно приближающейся цели и промодулированной промежуточной частоты на выходе фильтра доплеровских частот 37.
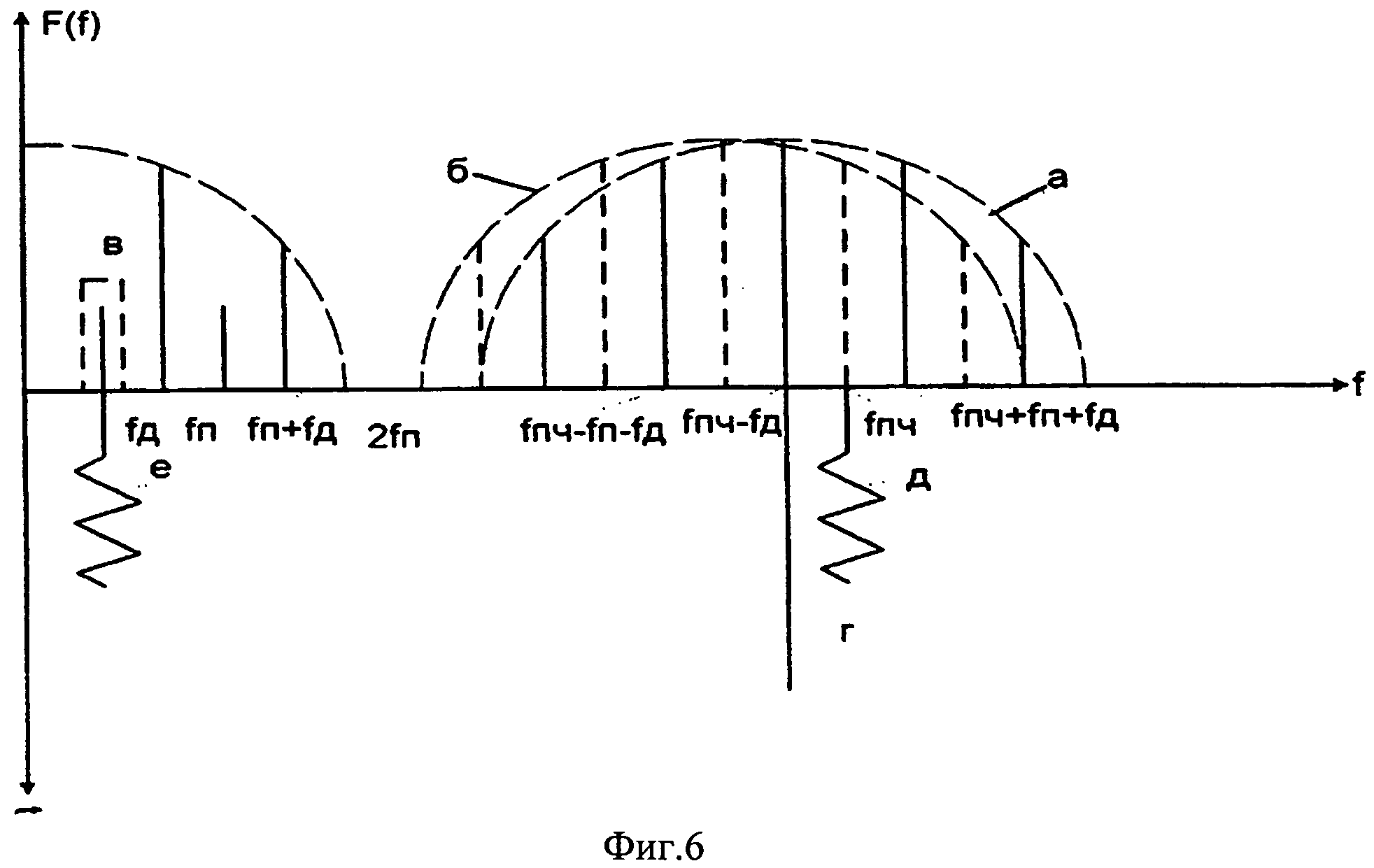
На фиг.6 представлены спектры сигналов, действующих в устройстве, поясняющие процесс определения знака направления движения для удаляющейся воздушного потока, где:
а - огибающая спектра излученного сигнала на промежуточной частоте;
б - огибающая спектра сигнала, принятого от удаляющего воздушного потока, на промежуточной частоте;
в - амплитудно-частотная характеристика фильтра доплеровских частот 37;
г - временная зависимость частоты первой гармоники сигнала равномерно удаляющего воздушного потока;
д - временная зависимость частоты опорного сигнала на втором входе детектора 28, поступающего с выхода модулятора промежуточной частоты 36;
е - временная зависимость разностной частоты первой гармоники сигнала равномерно удаляющего воздушного потока и промодулированной промежуточной частоты на выходе фильтра доплеровских частот 37.
Ключ 11 обеспечивает включение датчика скорости воздушного потока 13, который обычно состоит из крыльчатки, частота вращения которой пропорциональна скорости воздушного потока, и преобразователя вращения крыльчатки в электрический сигнал (см., например, В.В. Корнеев и др. «Основы автоматики и танковые автоматические системы», М., ВА БТВ, 1976, с.159-161). Блок 13 кинематически связан с пусковой установкой 5 так, чтобы измерительная ось прибора была перпендикулярна траектории полета управляемой ракеты. Блок стабилизации траектории управляемой ракеты 12 обеспечивает уменьшение колебательности управляемой ракеты относительно среднего значения ее траектории. Он содержит блок разрешения, срабатывающий при значительном увеличении сигнала на выходе блока 7, и блок формирования сигнала дополнительной коррекции (не показаны). Квадратор 14 обеспечивает возведение поданного на него сигнала с блока 13 (т.е. скорости воздушного потока) во вторую степень и его подачу на вход блока 15. Масштабирующий блок 15 обеспечивает получение сигнала, соответствующего аэродинамической силе, действующей на управляемую ракету в результате действия воздушного потока. Его значение определяется выражением (см., например, Неупокоев Ф.К. «Стрельба зенитными ракетами». М., Воениздат, 1970, с.99-121):

где k - коэффициент пропорциональности, определяющий уровень сигнала на выходе блока 15 от действующей силы, Cy - коэффициент сопротивления управляемой ракеты воздушному потоку в поперечной плоскости, ρ - плотность воздуха, S - характерная площадь управляемой ракеты.
Инвертор 16 обеспечивает изменение полярности сигнала с блока 15.
В качестве блока 20 определения знака направления движения воздушного потока может быть использовано, например, устройство определения знака направления движения цели (Анцев Г.В., Турнецкий А.С., патент на изобретение №2267138, МПК7 G01S 13/62).
Система наведения управляемых ракет, содержит привод 2 управления (ПУ), прицел (Пр)3, управляемую ракету (УР)4, пусковую установку (ПУс)5, линию 6 передачи команд (ЛПК), координатор (К) 7, блок 8 выработки управляющих сигналов (БВС), сумматор ("+") 9, блок 10 выработки управляющих команд (БВК), ключ (Кл) 11, блок 12 стабилизации траектории управляемой ракеты (БСТ), датчик 13 скорости воздушного потока (ДВП), квадратор (KB) 14, масштабирующий блок (МБ) 15, инвертор (Ив) 16, датчик 17 углового положения воздушного потока, который состоит из n - чувствительных элементов фотоприемников 18, блок 19 определения направления движения воздушного потока, блок 20 определения знака направления движения воздушного потока.
Блок 19 определения углового положения воздушного потока содержит n-элементов НЕ 21, n-дешифраторов 22, элемент ИЛИ 23, причем входами блока 19 определения углового положения воздушного потока являются входы n-элементов НЕ 21, выходы которых соединены с входами n-дешифраторов 22, выходы которых соединены с входами элемента ИЛИ 23, выход которого является выходом блока 19 определения направления движения воздушного потока.
Блок 20 определения знака направления движения потока воздуха содержит приемно-передающую антенну 24, переключатель приемо-передачи 25, первый 26 смеситель, усилитель 27 промежуточной частоты, детектор 28, задающий генератор 29, усилитель 30 мощности, импульсный модулятор 31, второй 32 смеситель, генератор 33 промежуточной частоты, индикатор 34, генератор 35 модуляции промежуточной частоты, модулятор 36 промежуточной частоты, фильтр 37 доплеровских частот, частотный демодулятор 38, определитель 39 временного изменения частоты сигнала цели и коррелятор 40 изменения частоты сигнала цели.
Работает предлагаемая система наведения управляемой ракеты следующим образом.
Совместив с помощью привода управления 2 прицельную марку прицела 3 с целью 1 и задав соответствующее положение пусковой установке 5 с управляемой ракетой 4, наводчик-оператор производит пуск управляемой ракеты 4. После пуска управляемая ракета 4 попадает в поле зрения прицела 3 и съюстированное с ним поле зрения координатора 7. Координатор 7 обеспечивает выработку сигнала, соответствующего отклонению управляемой ракеты от линии прицеливания, и подает его на вход блока 8 выработки сигнала управления, который производит усиление и корректировку сигнала управления и подает его через сумматор 9 на блок 10 выработки управляющих команд, где преобразуется, шифруется и в виде управляющей команды подается через линию передачи команд 6 на аппаратуру управления управляемой ракетой 4, которая под действием полученной команды перемещается к линии прицеливания, чем и устраняется рассогласование между ней и линией прицеливания (фиг.1).
При стрельбе в условиях равнин, степей, пустынь и др. включается блок 11 (при наличии сигнала на втором выходе координатора 7) и начинает работать блок 13 (датчик скорости воздушного потока), который вырабатывает сигнал, пропорциональный скорости воздушного потока. В блоке 14 этот сигнал возводится во вторую степень, а в блоке 15 окончательно преобразуется в соответствии с выражением (1), инвертируется в блоке 16, а затем подается на второй вход сумматора 9 в качестве сигнала компенсации силы воздушного потока. В сумматоре 9 сигнал компенсации корректирует управляющий сигнал в соответствии с действующими на управляемую ракету внешними возмущениями, вызванными воздушными потоками. При резких порывах ветра или на максимальных дальностях управления, когда отклонения управляемой ракеты от линии прицеливания и уровень сигнала на выходе координатора 7 становятся чрезмерными, срабатывает блок разрешения блока 12, благодаря чему блоком формирования сигнала дополнительной коррекции (в блоке 12) вырабатывается сигнал дополнительной коррекции, который подается на третий вход сумматора и обеспечивает дополнительное увеличение управляющего сигнала.
Определения углового положения воздушного потока происходит следующим образом.
Воздушный поток воздействует на датчик 17 углового положения, выполненный в виде флюгера, который меняет свое положение под действием воздушного потока (фиг.2).
В зависимости от углового положения воздушного потока стрелка закрывает определенные чувствительные элементы фотоприемников 18, при этом сигнал с выхода одного из датчиков 17 углового положения поступает на определенный вход блока 19 определения углового положения воздушного потока.
Сигнал, соответствующий угловому положению воздушного потока, поступает через один из n-первых 21 элементов НЕ, n-дешифраторов 22, на один из входов элемента ИЛИ 23 (фиг.3).
Определение знака направления движения воздушного потока определяется следующим образом.
Приемно-передающая антенна 24 излучает зондирующие импульсы, поступающие через переключатель приемо-передачи 25 от передатчика, построенного по многокаскадному принципу, в котором колебания задающего генератора 29 усиливаются в усилителе мощности 30, в котором одновременно происходит импульсная модуляция сигнала с частотой повторения Fп, задаваемой импульсным модулятором 31. Отраженные от флюгера импульсы принимаются антенной 24 и через переключатель приемо-передачи 25 поступают на первый вход первого смесителя 26 (фиг.4). На второй вход первого смесителя 26 с выхода второго смесителя 32 поступает гетеродинный сигнал, сформированный из колебаний задающего генератора 29 и колебаний генератора промежуточной частоты 33. Преобразованные в первом смесителе 26 в колебания на промежуточной частоте fпч сигналы от флюгера усиливаются до необходимого уровня в усилителе промежуточной частоты 27 и поступают на детектор 28. На второй вход детектора 28 с модулятора промежуточной частоты 36 поступает опорное колебание, частота которого отличается от частоты генератора промежуточной частоты 33 на величину, определяемую величиной управляющего напряжения, поступающего с выхода генератора модуляции промежуточной частоты 35, который вырабатывает периодически изменяющийся сигнал с частотой Fм, например, по пилообразному закону (или меандр, или синусоидальный). При изменении управляющего напряжения линейно-связанно изменяется и частота опорного колебания детектора 28 относительно fпч (фиг.5, д и фиг.6, д). На выходе детектора 28 образуются биения между сигналом цели и опорным колебанием детектора 28, которые с учетом импульсного характера зондирования образуют последовательность видеоимпульсов, модулированных по амплитуде доплеровской частотой fд в соответствии со скоростью движения флюгера.
Предлагаемое устройство осуществляет однозначное определение знака направления движения флюгера при скоростях цели, когда доплеровская поправка частоты |fд|≤Fп/2, что выполняется в том числе для целей, перемещающихся с малыми радиальными скоростями. Максимальная частота Fм спектра модулирующего напряжения генератора модуляции промежуточной частоты 35 выбирается меньше минимальной доплеровской поправки частоты сигнала флюгера fд min, соответствующей минимально заданной радиальной скорости движения флюгера, но больше максимальной частоты ширины (Δfц) спектра сигнала отфлюгера, т.е. Δfц<Fм<fg min. В связи с этим частота первой гармоники биений (фиг.5, е и фиг.6, е) изменяется во времени в незначительных пределах в соответствии с изменением модулирующего напряжения генератора модуляции промежуточной частоты 35. Первая гармоника биений фильтруется фильтром доплеровских частот 37, частотная характеристика которого (фиг.5, в и фиг.6, в) равномерна в полосе частот fд min<f≤Fп/2. При этом центральная частота сигнала цели изменяется периодически в соответствии с законом, определяемым генератором модуляции промежуточной частоты 35. Отфильтрованная первая гармоника биений поступает на частотный демодулятор 38, имеющий линейный диапазон демодуляции в полосе частот соответствующих полосе пропускания фильтра доплеровских частот 37. Выходное напряжение частотного демодулятора 38 содержит постоянную составляющую, определяемую доплеровской поправкой частоты относительно излученных колебаний, и переменную составляющую с частотой Fм, вызванную частотной модуляцией опорного напряжения детектора 28 (фиг.5, д и фиг.6, д), поступающих с модулятора промежуточной частоты 36, управляемого от генератора модуляции промежуточной частоты 35.
Для задачи, решаемой предлагаемым устройством, полезную информацию несет только переменная составляющая выходного напряжения частотного демодулятора 38 с частотой Fм, которая выделяется определителем временного изменения частоты сигнала 39. Выделенная переменная составляющая подается на сигнальный вход коррелятора изменения частоты сигнала цели 40, опорный (второй) вход которого подключен к выходу генератора модуляции промежуточной частоты 35.
В предлагаемом устройстве в модуляторе промежуточной частоты 36 с линейной характеристикой для конкретности принято, что осуществляется частотная модуляция прямо пропорционально с модулирующим напряжением генератора модуляции промежуточной частоты 35, хотя может быть выбрана и обратно пропорциональная зависимость.
Для приближающейся цели (фиг.5) характерна обратно пропорциональная зависимость между изменением опорной частоты детектора 28, поступающего с выхода модулятора промежуточной частоты 36 (фиг.5, д), и изменением частоты отфильтрованной в фильтре доплеровских частот 37 первой гармоники биений на выходе детектора 28 сигнала цели и модулированной опорной частоты детектора 28 (фиг.5, е). Коррелятор изменения частоты сигнала цели 40 определяет коэффициент корреляции между поданными на его входы напряжениями, равный минус 1, т.е. выдает, например, фиксированный отрицательный потенциал, который соответствует приближающейся цели.
Для удаляющейся цели (фиг.6) характерна прямо пропорциональная зависимость между изменением опорной частоты детектора 28 и изменением частоты отфильтрованной в фильтре доплеровских частот 37 первой гармоники биений на выходе детектора 28 сигнала цели и модулированной опорной частоты детектора 28 (фиг.6, е). Коррелятор 40 определяет коэффициент корреляции плюс 1, т.е. выдает, например, фиксированный положительный потенциал, который соответствует удаляющейся воздушному потоку относительно приемо-передающего антенны 24 блока 20.
Выходное напряжение коррелятора 40 изменения частоты сигнала используется для формирования соответствующей метки знака направления движения воздушного потока на экране индикатора 34, а также подается на пятый вход сумматора 9.
Введенная совокупность признаков обеспечивает измерение внешнего вредного возмущения направления и знака направления воздушного потока, определение и формирование необходимой компенсирующей поправки, которая уменьшает (вплоть до устранения) отклонение управляемой ракеты от линии прицеливания, что повышает точность ее наведения.
Способ распознавания цели и устройство для его осуществления
Способ определения параметров колебаний лопаток турбомашин и устройство для его осуществления
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ определения характеристик осколочного поля снаряда и устройство для его осуществления
Способ распознавания цели и устройство для его осуществления
Способ управления характеристиками поля поражения осколочно-фугасной боевой части ракеты и устройство для его осуществления
Способ испытания боеприпасов на аэроудар и устройство для его осуществления
Способ определения параметров колебаний лопаток турбомашин и устройство для его осуществления
Способ распознавания групповой цели и устройство для его осуществления
Способ определения параметров колебаний лопаток турбомашин и устройство для его осуществления
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ определения характеристик осколочного поля снаряда и устройство для его осуществления
Способ распознавания цели и устройство для его осуществления
Способ испытания боеприпасов на аэроудар и устройство для его осуществления
Способ определения параметров колебаний лопаток турбомашин и устройство для его осуществления
Способ распознавания групповой цели и устройство для его осуществления
Автомобильная бортовая информационная система
Способ определения эффективности фугасного воздействия равных по массе сосредоточенного и дробного рассредоточенного зарядов взрывчатого вещества

