Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ХАРАКТЕРИСТИКАМИ ПОЛЯ ПОРАЖЕНИЯ ОСКОЛОЧНО-ФУГАСНОЙ БОЕВОЙ ЧАСТИ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Изобретение относится к оборонной технике и может быть использовано для информационного обеспечения боевого снаряжения, в частности высокоточных управляемых снарядов или управляемых ракет.
Наиболее близким к изобретению является способ управления характеристиками поля поражения осколочно-фугасной боевой части ракеты, включающий излучение двумя действующими в разных диапазонах электромагнитного спектра неконтактными датчиками цели, фиксацию цели и определение стороны ее пролета на больших промахах, фиксацию цели и определение стороны ее пролета на малых промахах, формирование времени задержки на подрыв боевой части ракеты, определение положения цели относительно оси ракеты на основе сравнения полярности сигналов от датчиков азимута и угла места головки самонаведения ракеты, сравнение положения цели, определяемой, с одной стороны, головкой самонаведения ракеты, а с другой стороны - радиолокационным датчиком цели и оптическим датчиком цели и при совпадении положений цели установление факта отсутствия помехи, определение значений угловой скорости и ускорения перемещений цели на основе сравнения угловых координат цели с заданными значениями, определение динамики углового перемещения цели на основе анализа значений угловой скорости и ускорения движения цели, определение прогнозируемого углового положения цели на основе учета динамики ее углового перемещения и формирование поле поражения боевой части ракеты в направлении пролета цели с учетом ее прогнозируемого углового перемещения (патент РФ на изобретение №2398183, кл. F42B 15/01, от 27.08.2010 г.).
Наиболее близким к изобретению является устройство управления характеристиками поля поражения осколочно-фугасной боевой части ракеты, которая содержит контактный датчик цели, радиометрический неконтактный датчик цели для фиксации цели и определения стороны пролета на больших промахах, оптический неконтактный датчик цели, предназначенный для фиксации цели и определения стороны ее пролета на малых промахах, а также электронный блок расчета времени задержки подрыва с устройством, обеспечивающий подачу команды на срабатывание предохранительно-исполнительного механизма, датчик азимута и угла наклона головки самонаведения ракеты, блок селекции цели, блок коррекции углового положения цели, при этом первый, второй, третий, четвертый и пятый входы блока селекции цели соединены соответственно с входами приемных антенн радиометрического неконтактного датчика цели, входами передающих и приемных антенн оптического неконтактного датчика цели, датчика азимута и угла наклона головки самонаведения ракеты, первый, второй, третий, четвертый, пятый и шестой выходы блока селекции цели соединены с первым и вторым входами электронного блока, третьим, четвертым, пятым и шестым входами блока коррекции углового положения цели, первый и второй входы которого соединены с входами датчика азимута и угла места, первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой выходы блока коррекции углового положения цели соединены соответственно с третьим, четвертым, пятым, шестым, седьмым, восьмым, девятым и десятым входами электронного блока.
Блок селекции цели состоит из первого, второго, третьего и четвертого диода, первого, второго, третьего и четвертого элементов И, первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого ключей, первого и второго элементов ИЛИ, при этом первые, вторые, третий и четвертый входы блока селекции цели соединены с первыми входами пятого, шестого, седьмого, восьмого, первого, второго, третьего, четвертого ключей, одновременно с входами первого и второго диодов, одновременно с входами третьего и четвертого диодов, первый и третий диоды подключены по схеме обратного включения, второй и четвертый включены по схеме прямого включения, выходы первого, второго, третьего и четвертого диодов соединены соответственно с первыми входами второго и третьего, первого и четвертого, вторыми входами третьего, четвертого, второго и первого элементов И, выходы первого, второго, третьего и четвертого элементов И соединены со вторыми входами соответственно первого и пятого, второго и шестого, третьего и седьмого, четвертого и восьмого ключей, выходы первого, второго, третьего и четвертого ключей соединены с входами первого элемента ИЛИ, выходы пятого, шестого, седьмого и восьмого ключей соединены со входами второго элемента ИЛИ, выходы второго и первого элементов ИЛИ, первого, второго, третьего и четвертого элементов И являются соответственно первым, вторым, третьим, четвертым, пятым и шестым выходами блока селекции цели.
Блок коррекции углового положения цели содержит канал коррекции углового положения цели по азимуту, канал коррекции углового положения цели по углу места, первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой ключи, причем первый и второй входы блока коррекции углового положения цели являются входами канала коррекции углового положения цели по азимуту, канала коррекции углового положения цели по углу места, выходы которых соединены соответственно с первыми входами первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого ключей, вторые входы первого и пятого, второго и шестого, третьего и седьмого, четвертого и восьмого ключей соединены соответственно с третьим, четвертым, пятым и шестым входами блока селекции цели.
Каждый из каналов коррекции углового положения цели по азимуту или углу места содержит n пороговых устройств, задатчик сигналов, дифференцирующую цепь, элемент ИЛИ, сдвиговой регистр, первый и второй элементы И, первый и второй элементы НЕ, генератор импульсов, первый и второй счетчики, вычитающее устройство, первый и второй интеграторы, сумматор, при этом вход канала коррекции углового положения цели соединен одновременно с входом дифференцирующей цепи и с первыми входами n-пороговых устройств, вторые входы которых соединены с выходами задатчика сигналов, выходы пороговых устройств, через элемент ИЛИ, соединен с первым входом сдвигового регистра, второй и третий входы которого соединены соответственно с выходом дифференцирующей цепи и генератором импульсов, первый, второй, третий и четвертый выходы сдвигового регистра соединены соответственно с первыми входами первых элементов И, НЕ и вторых элементов И, НЕ, вторые входы первого и второго элементов И соединены с выходом генератора импульсов, а третьи выходы - с выходами соответственно первого и второго элементов НЕ, выходы первого и второго элементов И соединены соответственно с первыми входами первого и второго счетчиков, вторые входы которых соединены с выходом дифференцирующей цепи, выход первого и второго счетчиков соединены соответственно с первым и вторым входами вычитающего устройства, выход первого счетчика соединен с входом первого интегратора, выход которого соединен со вторым входом сумматора, выход вычитающего устройства через второй интегратор соединен с первым входом суммирующего устройства, выход которого является выходом канала коррекции углового положения цели по азимуту или углу места (патент РФ на изобретение №2398183, кл. F42B 15/01, от 27.08.2010 г.).
Недостатком данных способа и устройства является низкая эффективность боевого применения ракеты, обусловленная неиспользованием информации об условиях встречи ракеты с целью согласования поверхности срабатывания взрывателя с зоной опасных разрывов.
Зона опасных разрывов определяется областью в плоскости сближения ракеты с целью между прямыми линиями, проведенными из крайних точек цели параллельно границам сектора разлета осколков боевой части ракеты (А.Н.Дорофеев, А.П.Морозов, Р.С.Саркисян. Авиационные боеприпасы, изд. ВВИА им. проф. Н.Е.Жуковского, 1978 г.).
Технической задачей изобретения является повышение эффективности боевого применения за счет подрыва боевой части ракеты в зоне опасных разрывов.
Решение технической задачи достигается тем, что в способе управления характеристиками поля поражения осколочно-фугасной боевой части ракеты, включающем излучение двумя действующими в разных диапазонах электромагнитного спектра неконтактными датчиками цели, фиксацию цели и определение стороны ее пролета на больших промахах, фиксацию цели и определение стороны ее пролета на малых промахах, определение положения цели относительно оси ракеты на основе сравнения полярности сигналов от датчиков азимута и угла места головки самонаведения ракеты, сравнение положения цели, определяемой, с одной стороны, головкой самонаведения ракеты, а с другой стороны - радиолокационным датчиком цели и оптическим датчиком цели и при совпадении положений цели установление факта отсутствия помехи и определение значения угловой скорости и ускорения перемещений цели на основе сравнения угловых координат цели с заданными значениями, определение динамики углового перемещения цели на основе значений угловой скорости и ускорения движения цели, определение прогнозируемого углового положения цели на основе учета динамики ее углового перемещения и формирование поля поражения боевой части ракеты в направлении пролета цели с учетом ее прогнозируемого углового перемещения, дополнительно определяют условия подхода ракеты к цели, определяют класс цели и определяют время задержки на подрыв боевой части ракеты на основе информации об условиях подхода ракеты к цели, классе цели и конструктивных особенностях взрывателя и боевой части ракеты, при этом в качестве параметров условий подхода ракеты к цели определяют промах ракеты относительно цели и скорость сближения ракеты с целью, класс цели определяют на основе анализа величины ширины диаграммы направленности антенны.
Заявляемый способ реализуется в устройстве управления характеристиками поля поражения осколочно-фугасной боевой части ракеты направленно-кругового действия с разрывным зарядом и взрывательным устройством, включающим предохранительно-исполнительные механизмы, конечные узлы которых радиально смещены относительно оси заряда, содержащем контактный датчик цели, радиометрический неконтактный датчик цели, предназначенный для фиксации цели и определения стороны ее пролета на больших промахах, оптический неконтактный датчик цели, предназначенный для фиксации цели и определения стороны ее пролета на малых промахах, а также электронный блок расчета времени задержки подрыва с устройством, обеспечивающим подачу команды на срабатывание предохранительно-исполнительного механизма, датчиком азимута и угла наклона головки самонаведения ракеты, блоком селекции цели, блоком коррекции углового положения цели, при этом первый, второй, третий и четвертый входы блока селекции цели соединены соответственно с выходами приемных антенн радиометрического неконтактного датчика цели, выходами приемных антенн оптического неконтактного датчика цели, датчика азимута и угла наклона головки самонаведения ракеты, первый, второй, третий, четвертый, пятый и шестой выходы блока селекции цели соединены с четвертым и пятыми входами электронного блока, третьим, четвертым, пятым и шестым входами блока коррекции углового положения цели, первый и второй входы которого соединены с выходами датчика азимута и угла места, а первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой выходы блока коррекции углового положения цели соединены соответственно с шестым, седьмым, восьмым, девятым, десятым, одиннадцатым, двенадцатым и тринадцатым входами электронного блока, первый, вторые, третий и четвертый выходы которого соединены соответственно с входом передающей антенны, с входами приемных антенн, с первым и вторым входами предохранительно-исполнительных механизмов, дополнительно снабжено блоком определения условий подхода ракеты к цели, причем выходы датчика угла места, передатчика, приемника, источника питания головки самонаведения и выходы приемных антенн радиометрического неконтактного датчика цели соединены соответственно с первым, вторым, третьим, четвертым и пятыми входами блока определения условий подхода ракеты к цели, выход которого соединен с четырнадцатым входом электронного блока расчета времени задержки.
Кроме того, блок селекции цели состоит из первого, второго, третьего и четвертого диода, первого, второго, третьего и четвертого элементов И, первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого ключей, первого и второго элементов ИЛИ, при этом первые, вторые, третий и четвертый входы блока селекции цели соединены с первыми входами пятого, шестого, седьмого, восьмого, первого, второго, третьего, четвертого ключей, одновременно с входами первого и второго диодов, одновременно с входами третьего и четвертого диодов, первый и третий диоды подключены по схеме обратного включения, второй и четвертый включены по схеме прямого включения, выходы первого, второго, третьего и четвертого диодов соединены соответственно с первыми входами второго и третьего, первого и четвертого, вторыми входами третьего, четвертого, второго и первого элементов И, выходы первого, второго, третьего и четвертого элементов И соединены со вторыми входами соответственно первого и пятого, второго и шестого, третьего и седьмого, четвертого и восьмого ключей, выходы первого, второго, третьего и четвертого ключей соединены с входами первого элемента ИЛИ, выходы пятого, шестого, седьмого и восьмого ключей соединены со входами второго элемента ИЛИ, выходы второго и первого элементов ИЛИ, первого, второго, третьего и четвертого элементов И являются соответственно первым, вторым, третьим, четвертым, пятым и шестым выходами блока селекции цели.
Кроме того, блок коррекции углового положения цели содержит канал коррекции углового положения цели по азимуту, канал коррекции углового положения цели по углу места, первый, второй, третий, четвертый, пятый, шестой, седьмой и восьмой ключи, причем первый и второй входы блока коррекции углового положения цели являются входами канала коррекции углового положения цели по азимуту, канала коррекции углового положения цели по углу места, выходы которых соединены соответственно с первыми входами первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого ключей, вторые входы первого и пятого, второго и шестого, третьего и седьмого, четвертого и восьмого ключей соединены соответственно с третьим, четвертым, пятым и шестым входами блока селекции цели.
Кроме того, каждый из каналов коррекции углового положения цели по азимуту или углу места содержит n-пороговых устройств, задатчик сигналов, дифференцирующую цепь, элемент ИЛИ, сдвиговой регистр, первый и второй элементы И, первый и второй элементы НЕ, генератор импульсов, первый и второй счетчики, вычитающее устройство, первый и второй интеграторы, сумматор, при этом вход канала коррекции углового положения цели соединен одновременно с входом дифференцирующей цепи и с первыми входами n-пороговых устройств, вторые входы которых соединены с выходами задатчика сигналов, выходы пороговых устройств, через элемент ИЛИ, соединен с первым входом сдвигового регистра, второй и третий входы которого соединены соответственно с выходом дифференцирующей цепи и генератором импульсов, первый, второй, третий и четвертый выходы сдвигового регистра соединены соответственно с первыми входами первых элементов И, НЕ и вторых элементов И, НЕ, вторые входы первого и второго элементов И соединены с выходом генератора импульсов, а третьи выходы - с выходами соответственно первого и второго элементов НЕ, выходы первого и второго элементов И соединены соответственно с первыми входами первого и второго счетчиков, вторые входы которых соединены с выходом дифференцирующей цепи, выходы первого и второго счетчиков соединены соответственно с первым и вторым входами вычитающего устройства, выход первого счетчика соединен с входом первого интегратора, выход которого соединен со вторым входом сумматора, выход вычитающего устройства через второй интегратор соединен с первым входом суммирующего устройства, выход которого является выходом канала коррекции углового положения цели по азимуту или углу места.
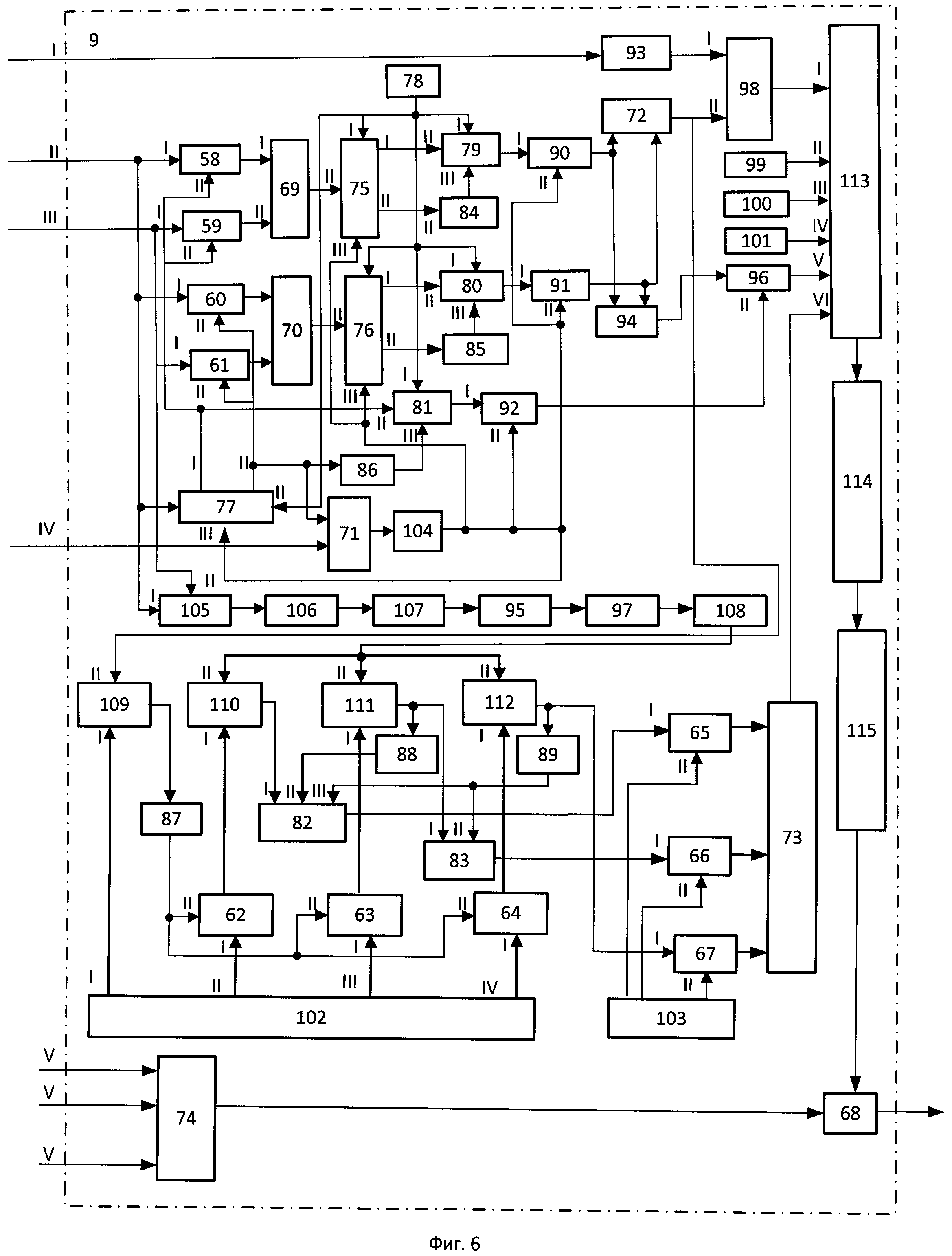
Блок определения условий встречи ракеты с целью содержит первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый и одиннадцатый ключи, первый, второй, третий, четвертый, пятый и шестой элементы ИЛИ, первый, второй и третий сдвиговые регистры, генератор импульсов, первый, второй, третий, четвертый и пятый элементы И, первый, второй, третий, четвертый, пятый и шестой элементы НЕ, первый, второй и третий счетчики, функциональный преобразователь, первое и второе вычитающие устройства, первый и второй делители, умножитель, первый, второй, третий, четвертый и пятый задатчики сигналов, дифференцирующую цепь, смеситель, усилитель промежуточной частоты, измеритель ширины диаграммы направленности, первое, второе, третье, четвертое и пятое пороговые устройства, аналого-цифровой преобразователь, вычислитель времени задержки, цифро-аналоговый преобразователь, при этом первый, второй, третий, четвертые и пятые входы блока определения условий подхода ракеты к цели являются соответственно входом функционального преобразователя, первыми входами первого, третьего ключей и одновременно первыми входами третьего сдвигового регистра и смесителя, первыми входами второго и четвертого ключей и одновременно вторым входом смесителя, вторым входом третьего элемента ИЛИ, и входами шестого элементами ИЛИ, выходы первого и второго ключей соединены с первым и вторым входами первого элемента ИЛИ, выход которого соединен со вторым входом первого сдвигового регистра, выходы третьего и четвертого ключей соединены с первым и вторым входами второго элемента ИЛИ, выход которого соединен со вторым входом второго сдвигового регистра, первые и вторые выходы первого, второго и третьего сдвиговых регистров соединены соответственно со вторыми входами первого, второго и третьего элементов И и входами первого, второго и третьего элементов НЕ, выход генератора импульсов соединен с первыми входами первого, второго и третьего сдвиговых регистров, первыми входами первого, второго и третьего элементов И, выход дифференцирующей цепи соединен с третьими входами первого, второго и третьего сдвиговых регистров, вторыми входами первого, второго и третьего счетчиков, выходы первого, второго и третьего элементов НЕ соединены соответственно с третьими входами первого, второго и третьего элементов И, выходы которых соединены с первыми входами первого, второго и третьего счетчиков, выходы которых соединены соответственно с первыми и вторыми входами четвертого элемента ИЛИ и первого вычитающего устройства и вторым входом первого делителя, выход четвертого элемента ИЛИ соединен со вторым входом умножителя, первый вход которого соединен с выходом функционального преобразователя, выход первого вычитающего устройства соединен с первым входом первого делителя, выходы умножителя, первого, второго и третьего задающих устройств, первого делителя и пятого элемента ИЛИ соединены соответственно с первым, вторым, третьим, четвертым, пятым и шестым входами аналого-цифрового преобразователя, выход смесителя через усилитель промежуточной частоты, измеритель ширины диаграммы направленности, второе вычитающее устройство, второй делитель, первое пороговое устройства соединен со вторыми входами третьего, четвертого и пятого пороговых устройств, выход четвертого элемента ИЛИ соединен со вторым входом второго порогового устройства, первый вход которого соединен с первым выходом четвертого задающего устройства, а выход через четвертый элемент НЕ соединен со вторыми входами пятого, шестого и седьмого ключей, первые входы которых соединены соответственно со вторым, третьим и четвертым выходами четвертого задатчика постоянных сигналов, а выходы - с первыми входами третьего, четвертого и пятого пороговых устройств, выход третьего порогового устройства соединен с первым входом четвертого элемента И, второй и третий входы которого соединены через пятый и шестой элементы НЕ с выходами четвертого и пятого пороговых устройств, выход четвертого порогового устройства соединен с первым входом пятого элемента И, второй вход которого через шестой элемент НЕ соединен с выходом пятого порогового устройства, выходы четвертого, пятого элементов И, выход пятого порогового устройства соединены соответственно с первыми входами восьмого, девятого и десятого ключей, вторые входы которых соединены с выходами пятого задатчика сигналов, а выходы - соответственно с первым, вторым и третьим входами пятого элемента ИЛИ, выход аналого-цифрового преобразователя соединен с входом вычислителя времени задержки, выход которого через цифроаналоговый преобразователь соединен со вторым входом одиннадцатого ключа, первый вход которого соединен с выходом шестого элемента ИЛИ, выход одиннадцатого ключа является выходом блока определения условий встречи ракеты с целью.
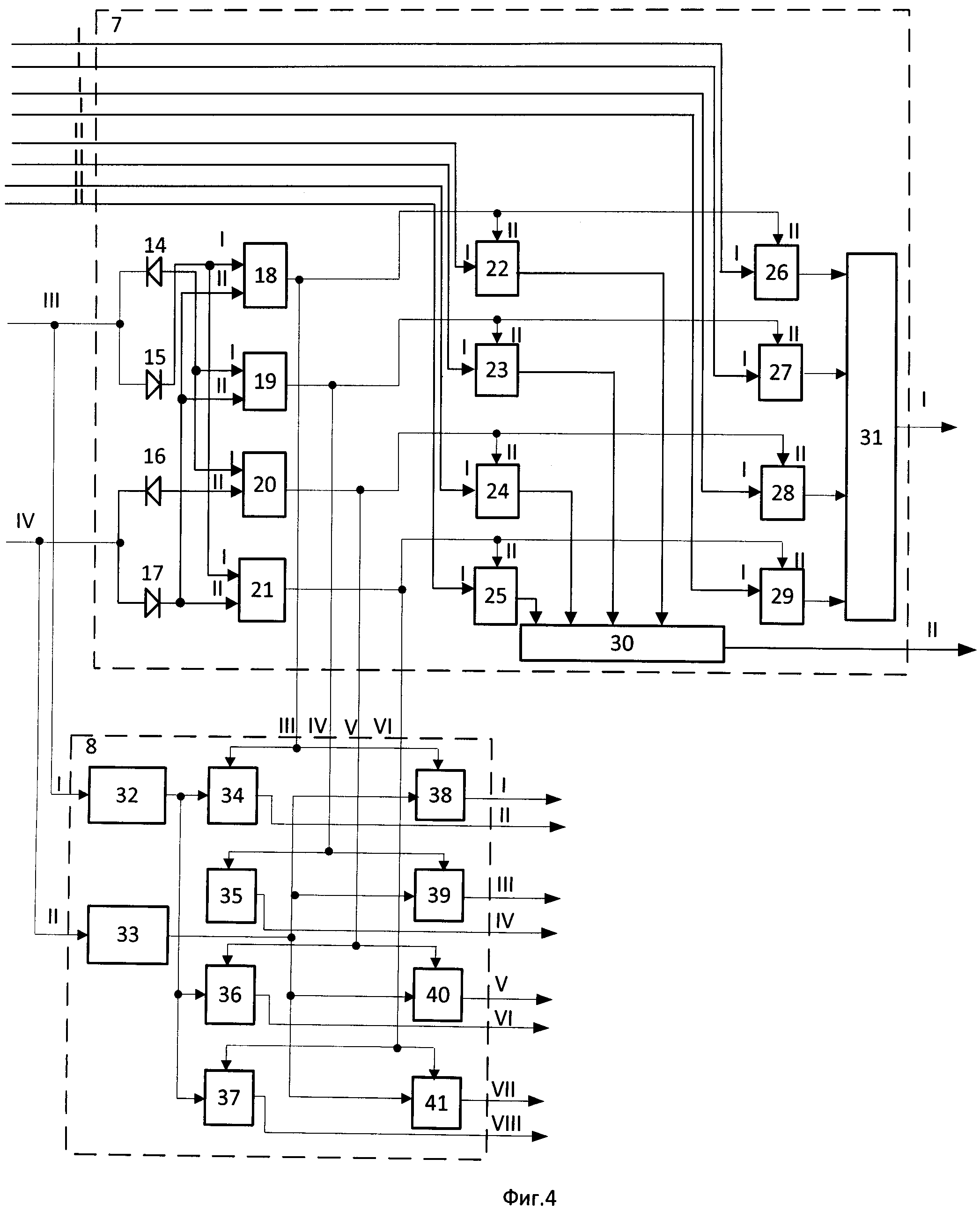
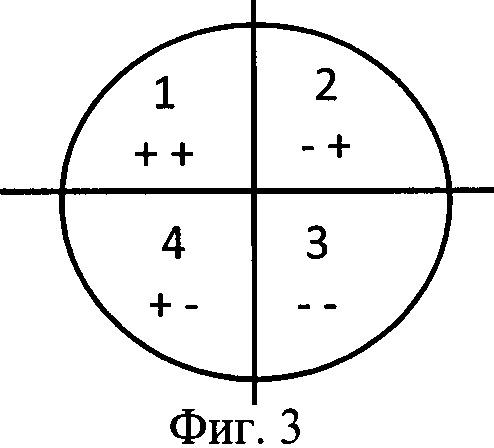
На фиг.1 изображена конструктивная схема устройства управления характеристиками поля поражения осколочно-фугасной боевой части ракеты, на фиг.2 - структурная схема устройства управления характеристиками поля поражения осколочно-фугасной боевой части ракеты, на фиг.3 - схема определения сектора нахождения цели относительно продольной оси ракеты, на фиг.4 - структурная схема блока селекции цели, на фиг.5 - структурная схема блока коррекции углового положения цели, на фиг.6 - структурная схема блока определения условий подхода ракеты к цели.
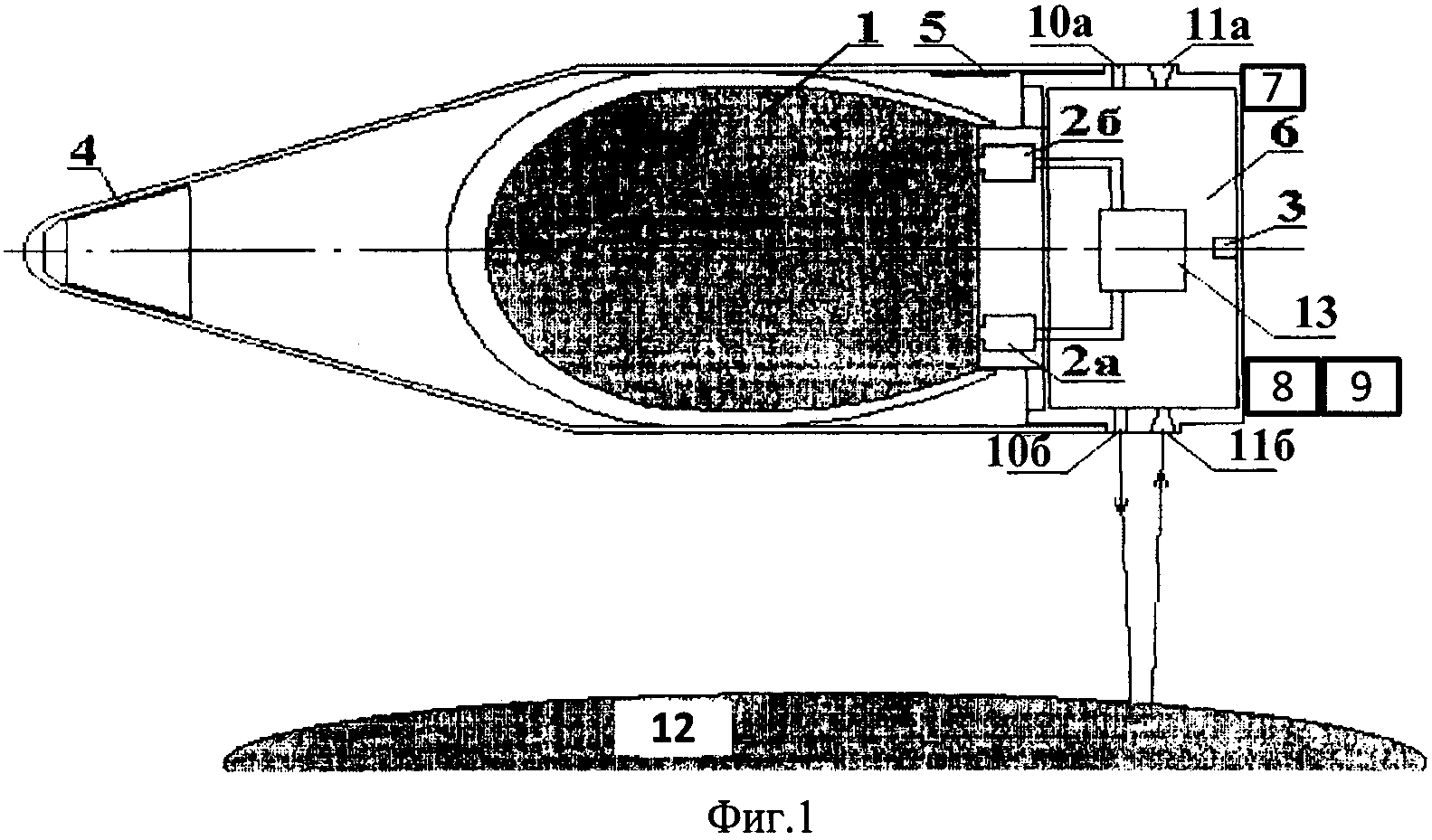
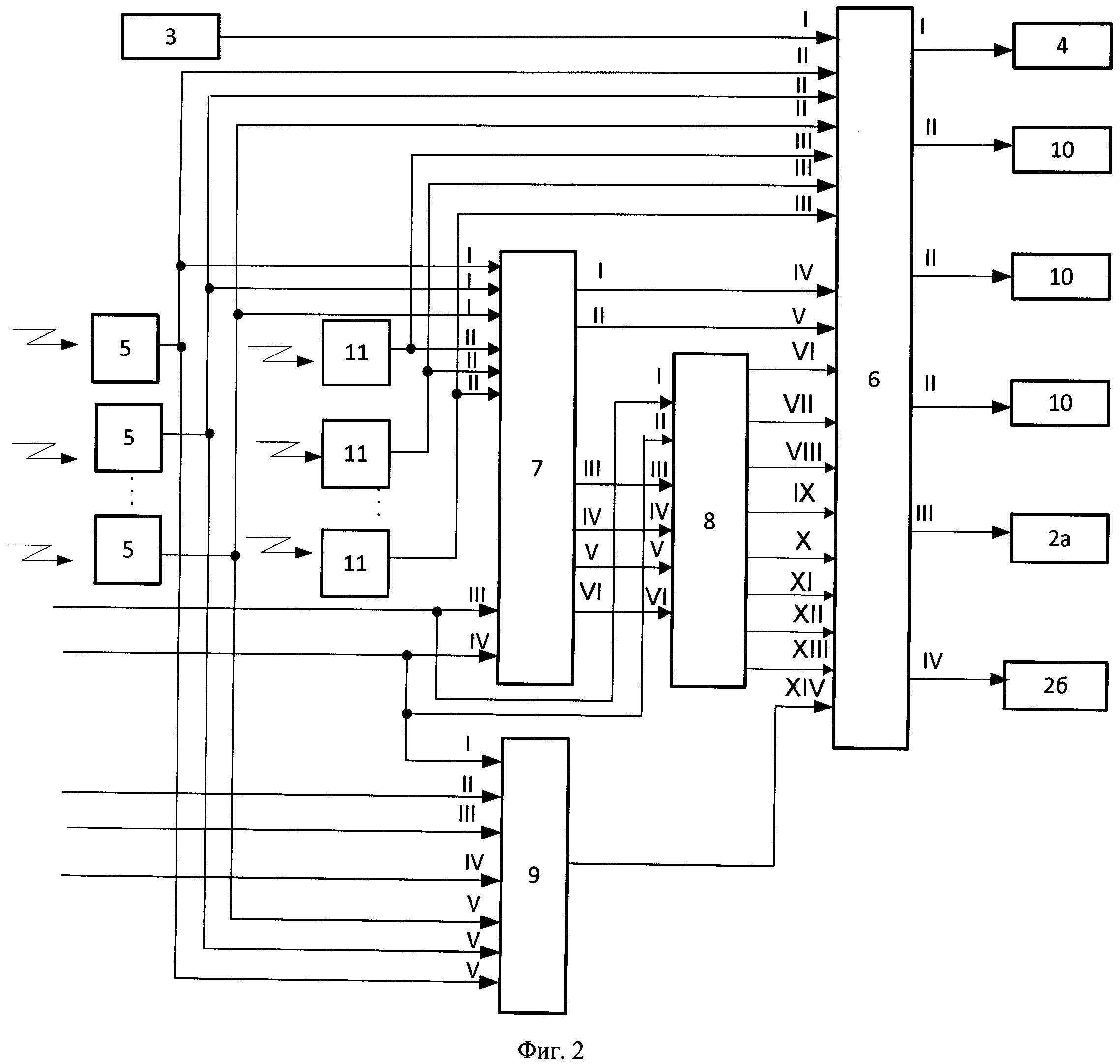
Устройство управления характеристиками поля поражения осколочно-фугасной боевой части ракеты (фиг.1) содержит разрывной заряд 1 и взрывательное устройство, включающее предохранительно-исполнительные механизмы 2а и 2б, контактный датчик 3 цели, радиометрический неконтактный датчик цели, содержащий излучающую 4 и принимающую 5 антенны, предназначенный для фиксации цели и определения стороны пролета на больших промахах, электронный блок 6 расчета времени задержки подрыва, блок 7 селекции цели, блок 8 коррекции углового положения цели, блок 9 определения условий встречи ракеты с целью.
Взрывательное устройство снабжено многоканальным оптическим неконтактным датчиком цели, содержащим излучающие 10а и 10б и принимающие 11а и 11б каналы, предназначенные для определения стороны пролета цели 12 на малых промахах, при этом электронный блок 6 расчета времени задержки подрыва снабжен устройством 13, обеспечивающим подачу сигнала на срабатывание предохранительно-исполнительного механизма 2а или 26, конечный узел которого радиально смещен относительно оси заряда в сторону, противоположную стороне пролета.
Блок 7 селекции цели состоит из первого 14, второго 15, третьего 16 и четвертого 17 диодов, первого 18, второго 19, третьего 20 и четвертого 21 элементов И, первого 22, второго 23, третьего 24, четвертого 25, пятого 26, шестого 27, седьмого 28 и восьмого 29 ключей, первого 30 и второго 31 элементов ИЛИ.
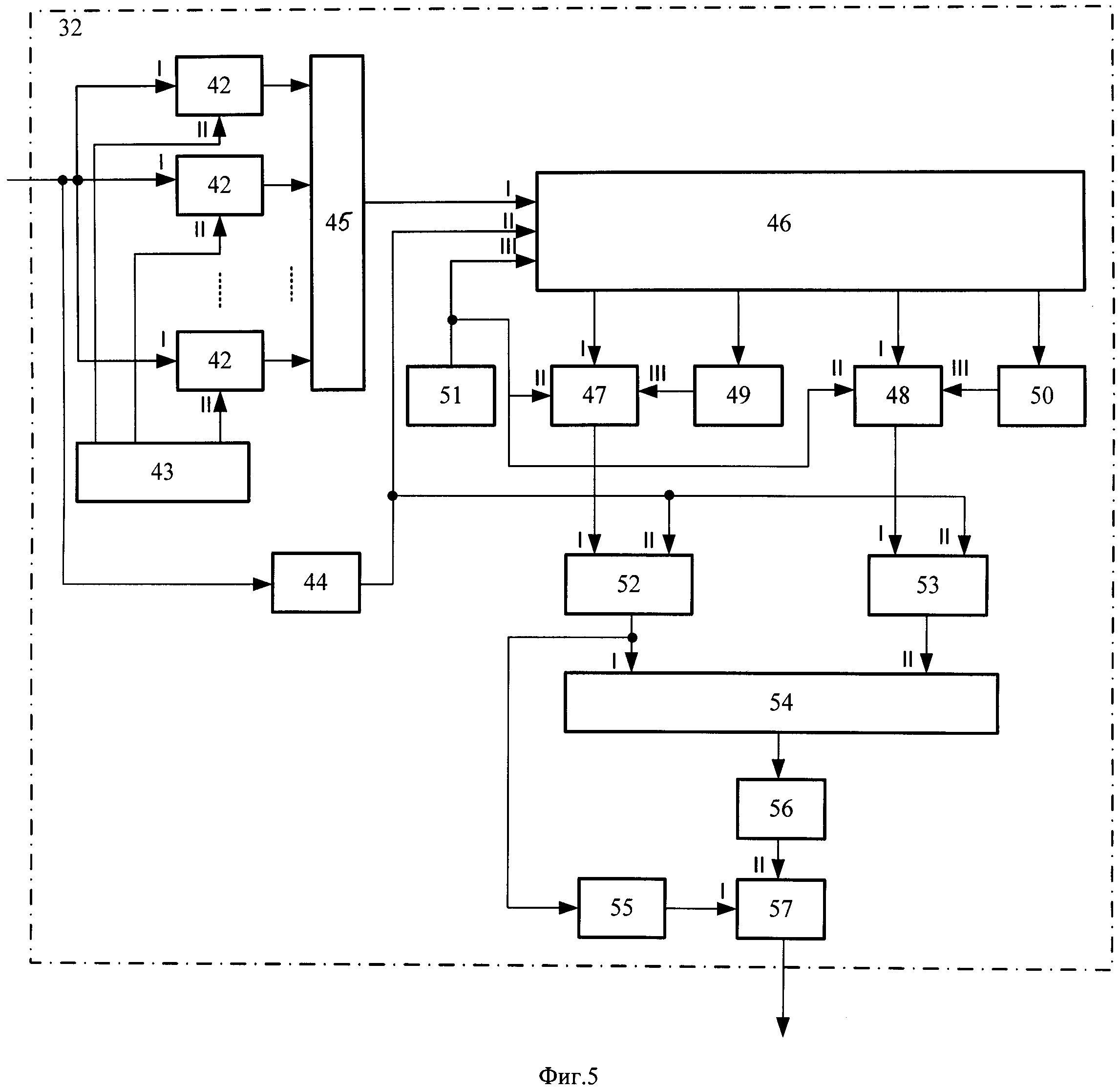
Блок 8 коррекции углового положения цели содержит канал 32 коррекции углового положения цели по азимуту, канал 33 коррекции углового положения цели по углу места, первый 34, второй 35, третий 36, четвертый 37, пятый 38, шестой 39, седьмой 40 и восьмой 41 ключи.
Каждый из каналов (32, 33) коррекции углового положения цели содержит n-пороговые устройства 42, задатчик 43 сигналов, дифференцирующую цепь 44, элемент ИЛИ 45, сдвиговой регистр 46, первый 47 и второй 48 элементы И, первый 49 и второй 50 элементы НЕ, генератор 51 импульсов, первый 52 и второй 53 счетчики, вычитающее устройство 54, первый 55 и второй 56 интеграторы, сумматор 57.
Блок 9 определения условий встречи ракеты с целью содержит первый 58, второй 59, третий 60, четвертый 61, пятый 62, шестой 63, седьмой 64, восьмой 65, девятый 66, десятый 67 и одиннадцатый 68 ключи, первый 69, второй 70, третий 71, четвертый 72, пятый 73 и шестой 74 элементы ИЛИ, первый 75, второй 76 и третий 77 сдвиговые регистры, генератор 78 импульсов, первый 79, второй 80, третий 81, четвертый 82 и пятый 83 элементы И, первый 84, второй 85, третий 86, четвертый 87, пятый 88 и шестой 89 элементы НЕ, первый 90, второй 91 и третий 92 счетчики, функциональный преобразователь 93, первое 94 и второе 95 вычитающие устройства, первый 96 и второй 97делители, умножитель 98, первый 99, второй 100, третий 101, четвертый 102 и пятый 103 задатчики сигналов, дифференцирующую цепь 104, смеситель 105, усилитель 106 промежуточной частоты, измеритель 107 ширины диаграммы направленности, первое 108, второе 109, третье 110, четвертое 111 и пятое 112 пороговые устройства, аналого-цифровой преобразователь 113, вычислитель 114 времени задержки, цифро-аналоговый преобразователь 115.
Предлагаемое устройство работает следующим образом.
В процессе полета ракеты к цели, на этапе самонаведения головка самонаведения обеспечивает захват и автосопровождение цели, при этом информация об угловом положении цели от датчика азимута и угла места поступает на третий и четвертый входы блока 7 селекции цели.
Кроме того, сигналы с выходов датчика угла места, передатчика, приемника, источника питания головки самонаведения (ГСН) ракеты и выходов приемных антенн 5 радиометрического неконтактного датчика цели поступают соответственно на первый, второй, третий, четвертый и пятый входы блока 9 определения условий встречи ракеты с целью (фиг.2).
С выхода датчика угла места сигнал, соответствующий углу места цели, поступает на первый вход блока 9 определения условий встречи ракеты с целью и соответственно на вход функционального преобразователя 93, с выхода которого сигнал, соответствующий значению sinφ, поступает на первый вход умножителя 98, на второй вход которого поступает сигнал с выхода четвертого 72 элемента ИЛИ, соответствующий дальности до цели. С выхода умножителя 98 сигнал, соответствующий мгновенному промаху ракеты относительно цели r=Дsinφ, поступает на первый вход АЦП 113 (фиг.6).
Дальность до цели определяется следующим образом.
В момент излучения электромагнитной энергии (ЭМЭ) в направлении на цель сигнал с выхода передатчика ГСН ракеты поступает на второй вход третьего 77 сдвигового регистра, с первого выхода которого сигнал поступает на вторые входы первого 58 и второго 59 ключей, тем самым открывая их. При этом обеспечивается прохождение сигнала с выхода передатчика через первый вход первого 58 ключа, первый вход первого 69 элемента ИЛИ, на второй вход первого 75 сдвигового регистра, с первого выхода которого сигнал поступает на второй вход первого 79 элемента И, на третий вход которого поступает сигнал с выхода первого 84 элемента НЕ, обеспечивая тем самым прохождение сигнала с выхода генератора 78 импульсов на первый вход первого 90 счетчика.
В момент приема отраженного излучения ЭМЭ от цели антенной ГСН ракеты сигнал с ее выхода поступает на вход приемника ГСН ракеты, с выхода которого через первый вход второго 59 ключа, второй вход первого 69 элемента ИЛИ сигнал поступает на второй вход первого 75 сдвигового регистра, обеспечивая тем самым поступление сигнала с его второго выхода на вход первого 84 элемента НЕ, снимая тем самым сигнал с третьего входа первого 79 элемента И и прекращая подсчет сигналов первым 90 счетчиком.
Таким образом подсчитывается временной интервал между моментом излучения и приема электромагнитной энергии, отраженной от цели, который позволяет определить дальность до цели за счет учета скорости распространения электромагнитной энергии.
Новый цикл измерения дальности осуществляется в момент следующего излучения ЭМЭ передатчиком ГСН, при этом сигнал с его выхода поступает на второй вход третьего 77 сдвигового регистра, обеспечивая выдачу сигнала с его второго выхода на вторые входы третьего 60 и четвертого 61 ключей, тем самым открывая их. При этом сигнал с выхода передатчика ГСН через первый вход третьего 60 ключа, первый вход второго 70 элемента ИЛИ поступает на второй вход второго 76 сдвигового регистра, с первого выхода которого сигнал поступает на второй вход второго 80 элемента И, на третий вход которого поступает сигнал с выхода второго 85 элемента НЕ, обеспечивая тем самым поступление сигналов с выхода генератора 78 импульсов на первый вход второго 91 счетчика (фиг 6).
В момент получения отраженного излучения ЭМЭ от цели сигнал с выхода приемника ГСН поступает через первый вход четвертого 61 ключа, второй вход второго 70 элемента ИЛИ на второй вход второго 76 сдвигового регистра, со второго выхода которого сигнал поступает на вход второго 85 элемента НЕ, снимая тем самым сигнал с третьего входа второго 80 элемента И и прекращая подсчет сигналов вторым 91 счетчиком.
Таким образом определяется дальность при втором цикле измерений, следующий цикл измерений осуществляется аналогично с первым циклом измерений.
Для определения скорости сближения ракеты с целью значения о дальности до цели, измеренные в различные циклы (промежутки времени), поступают на первый и второй входы первого 94 вычитающего устройства, с выхода которого поступает на первый вход первого 96 делителя на второй вход которого поступает сигнал с выхода третьего 92 счетчика. Причем на выходе счетчика 92 формируется временной интервал между началами первого и второго циклов измерений, который определяется аналогично с рассмотренными выше измерениями временных интервалов.
Сигнал с выхода первого 96 делителя, соответствующий скорости сближения ракеты с целью, поступает на пятый вход аналого-цифрового преобразователя 113.
Класс цели может быть определен, например, на основе анализа величины ширины диаграммы направленности антенны.
Это достигается следующим образом: на первый и второй вход смесителя 105 поступает излучаемый передатчиком и принятый приемником отраженный от цели сигнал, с выхода смесителя 105 сигнал, соответствующий промежуточной частоте, поступает на вход усилителя 106 промежуточной частоты, с выхода которого поступает на вход измерителя 107 ширины диаграммы направленности, на выходе которого формируется сигнал, соответствующий значению θц, который поступает на второе 95 вычитающее устройство, на выходе которого формируется сигнал Δθ=θц-θА. Значение ширины диаграммы направленности антенны 0А введено в вычитающее устройство в качестве константы. С выхода второго 95 вычитающего устройства сигнал поступает на вход второго 97 делителя, на выходе которого формируется сигнал вида β=Δθц/θА. Значение ширины диаграммы направленности антенны θA введено в делитель в качестве константы. Сигнал с выхода делителя 97 поступает на вход первого 108 порогового устройства, где сравнивается с порогом, равным 0,01. Значение порога введено в первое 108 пороговое устройство в качестве константы, с выхода которого при превышение уровня порога выдается сигнал «протяженная цель» на вторые входы третьего 110, четвертого 111 и пятого 112 пороговых устройства.
При дальнейшем сближении ракеты с целью на определенной дальности от цели происходит срабатывание второго 102 порогового устройства, с выхода которого снимается сигнал, обеспечивая тем самым подачу сигналов через четвертый 87 элемент НЕ на вторые входы пятого 62, шестого 63, седьмого 64 ключей.
Со второго, третьего и четвертого выходов четвертого 102 задатчика сигналов сигналы, соответствующие различным уровням, через первые входы пятого 62, шестого 63, седьмого 64 ключей поступают на первые входы третьего 110, четвертого 111 и пятого 112 пороговых устройств.
В случае если текущее значение сигнала β соответствует неравенству β>β1 и β≤β2, то принимается решение о принадлежности цели классу «малая цель», при этом происходит срабатывание третьего 110 порогового устройства, с выхода которого сигнал поступает на первый вход четвертого 82 элемента И, на второй и третий входы которого поступают сигналы с выхода пятого 88 и шестого 89 элементов НЕ.
С выхода четвертого 82 элемента И сигнал, соответствующей классу «малая цель», поступает на первый вход восьмого 65 ключа, на второй вход которого поступает сигнал со второго выхода пятого 103 задатчика сигналов. С выхода восьмого 65 ключа сигнал через первый вход пятого 73 элемента ИЛИ поступает на шестой вход АЦП 113.
В случае если текущее значение β соответствует неравенству β>β2, β≥β3, то принимается решение о принадлежности цели классу «средняя цель», при этом происходит срабатывание четвертого 111 порогового устройства, с выхода которого сигнал поступает на первый вход пятого 88 элемента И, на второй вход которого поступает сигнал с выхода шестого 89 элемента НЕ. С выхода пятого 88 элемента И сигнал поступает на первый вход девятого 66 ключа, на второй вход которого поступает сигнал с второго выхода пятого 103 задатчика сигналов. С выхода девятого 66 ключа сигнал через второй вход пятого 73 элемента ИЛИ поступает на шестой вход АЦП 113.
В случае если текущее значение сигнала β соответствует неравенству β>β3, то принимается решение о принадлежности цели классу «большая цель», при этом происходит срабатывание пятого 112 порогового устройства, с выхода которого сигнал поступает на первый вход десятого 67 ключа, на второй вход которого поступает сигнал с третьего выхода пятого 103 задатчика сигналов. С выхода десятого 67 ключа сигнал через третий вход пятого элемента ИЛИ поступает на шестой вход АЦП 113.
С выходов первого 99, второго 100, третьего 101 задатчиков сигналов на второй, третий, четвертый входы аналого-цифрового преобразователя поступают сигналы, соответствующие φ0 - угловому положению диаграммы направленности антенной системы неконтактного радиометрического датчика цели,  - среднему направлению разлета осколков боевой части ракеты в статике, ϑ0 - начальной скорости разлета осколков при взрыве в статике.
- среднему направлению разлета осколков боевой части ракеты в статике, ϑ0 - начальной скорости разлета осколков при взрыве в статике.
Вычислитель времени задержки на подрыв боевой части ракеты обеспечивает согласование взрывателя с зоной опасных разрывов боевой части ракеты за счет вычисления величины задержки в срабатывании боевой части ракеты, в соответствии с условиями подхода ракеты к цели.
Величина показателя эффективности стрельбы по воздушным целям ракетами с радиовзрывателями существенно зависит от положения области срабатывания взрывателя (А.Н.Дорофеев, А.П.Морозов, Р.С.Саркисян. Авиационные боеприпасы, изд. ВВИА Н.Е.Жуковского).
Величина задержки, обеспечивающая оптимальное для условий сближения ракеты с целью (r, ϑ1ц) положение точки срабатывания радиометрического неконтактного датчика цели, определяется в соответствии с выражением:
 .
.
где r - промах ракеты относительно цели,  - среднее направление разлета осколков в динамике.
- среднее направление разлета осколков в динамике.
Среднее направление разлета осколков в динамике определяется в соответствии с выражением:
 ,
,
где  - среднее направление разлета осколков в статике.
- среднее направление разлета осколков в статике.
С выхода вычислителя времени задержки 114 сигнал поступает на цифро-аналоговый преобразователь, с выхода которого поступает на второй вход одиннадцатого 68 ключа, на первый вход которого поступает сигнал с выхода шестого 74 элемента ИЛИ.
В дальнейшем, при сближении ракеты с целью входящий в состав взрывательного устройства радиометрический неконтактный датчик цели осуществляет фиксацию углового положения цели и, в случае реализации промаха, величина которого превышает расстояние между излучающей 4 и приемной 5 антеннами, определяет сторону пролета с дискретностью по экваториальному углу, определяемую количеством пар излучающих и принимающих антенн.
В дальнейшем, при сближении ракеты с целью оптический неконтактный датчик цели осуществляет зондирование окружающего пространства на глубину, определяемую его чувствительностью. В случае реализации промаха, величина которого меньше предельного для оптического неконтактного датчика цели (НДЦ), оптический сигнал, посланный его излучающим каналом 106, отраженный от поверхности цели 12 и полученный принимающим каналом 11б, воспринимается принимающим блоком оптического НДЦ. Это также обеспечивает определение стороны пролета с дискретностью по экваториальному углу, определяемому количеством пар излучающих и принимающих блоков (фиг.1, фиг.2).
Сигналы с выходов приемных антенн 5, 11 радиометрического и оптического датчиков поступают на первую и вторую группы блока 11 селекции цели (фиг.2). В случае совпадения по пространственному положению цели, определяемой, с одной стороны, блоком селекции цели, а с другой стороны - одним из выходов приемных антенн 5, 11 радиометрического и оптического датчиков, происходит последовательная выдача сигналов на первый и второй входы электронного блока 6 расчета времени задержки подрыва (фиг.2).
Кроме того, сигналы с выходов датчика азимута и угла наклона поступают на первый и второй входы блока 8 коррекции углового положения цели, на третий, четвертый, пятый, шестой входы которого поступают сигналы с третьего, четвертого, пятого и шестого выходов блока 7 селекции цели.
В зависимости от сектора нахождения цели сигналы с двух выходов блока 8 коррекции углового положения цели, соответствующие прогнозируемому угловому положению цели по азимуту и углу места, поступают на третий и четвертый, или пятый и шестой, или седьмой и восьмой, или на девятый и десятый входы электронного блока 6 расчета времени задержки подрыва.
Электронный блок 6 расчета времени задержки подрыва обеспечивает формирование поля поражения в зависимости от сектора нахождения цели и прогнозируемого углового положения цели в данном секторе (фиг.2).
Осуществление пространственной селекции цели осуществляется следующим образом.
Сигналы с датчиков азимута и угла места головки самонаведения ракеты поступают на третий и четвертый входы блока 7 селекции цели и соответственно на входы первого 14 и одновременно второго 15 диодов, третьего 16 и одновременно четвертого 17 диодов, с выходов которых в зависимости от полярности сигналов поступают на первые входы соответственно второго 19 и третьего 20 элементов И, первого 18 и четвертого 21 элементов И, вторые входы третьего 20 элементов И, четвертого 21, второго 19 и первого 18 элементов И.
С одной стороны, в зависимости от сектора нахождения цели (фиг.3) сигнал с выхода одного из элементов И (первого 18, второго 19, третьего 20 и четвертого 21) поступает на вторые входы соответственно первого 22 и пятого 26, или второго 23 и шестого 27, или третьего 24 и седьмого 28, или четвертого 25 и восьмого 29 ключей, с другой стороны - на первые входы одного из ключей (пятого 26, шестого 27, седьмого 28 и восьмого 29), в зависимости от стороны пролета цели сигнал поступает с одного из выходов приемной антенны 5 радиометрического датчика, кроме того, сигнал поступает на первые входы одного из ключей (первого 22, второго 23, третьего 24, четвертого 25), в зависимости от стороны пролета цели сигнал поступает от одной из приемной антенны 11 оптического датчика цели (фиг.4).
В случае совпадения сектора и направления стороны пролета цели, определяемого радиометрическим датчиком, сигнал с выхода одного из ключей (пятого 26, шестого 27, седьмого 28 и восьмого 29) поступает на один из входов второго 31 элемента ИЛИ.
В случае совпадения сектора и направления стороны пролета цели, определяемого оптическим датчиком, сигнал с выхода одного из ключей (первого 22, второго 23, третьего 24 и четвертого 25) поступает на один из входов первого 30 элемента ИЛИ.
Сигналы с выходов второго 31 и первого 30 элементов ИЛИ последовательно поступают на первый и второй входы электронного блока 6 расчета времени задержки подрыва.
Каждый из каналов (32, 33) коррекции углового положения цели обеспечивает учет динамики изменения углового положения цели на основе анализа значений угловой скорости и ускорения цели. Так как каждый канал работает идентично, рассмотрим работу одного из каналов (фиг.5).
С выхода датчика азимута сигнал поступает на вход канала 32 коррекции углового положения цели и соответственно, одновременно, на вход дифференцирующей цепи 44 и на первые входы n пороговых устройств 42, на вторые входы которых поступает сигнал с выхода задатчика 43 сигналов.
С выхода дифференцирующей цепи 44 сигнал поступает на вторые входы сдвигового регистра 46, первого 52 и второго 53 счетчиков, обеспечивая тем самым их обнуление.
В процессе сближения ракеты с целью уровень сигнала, соответствующий угловому положению цели, превышает одно из заданных значений, обеспечивая тем самым срабатывания одного из пороговых устройств 42, с выхода которого сигнал через элемент ИЛИ 45 поступает на первый вход сдвигового регистра 46, с первого, второго, третьего и четвертого выхода которого в зависимости от динамики изменения величины сигнала происходит последовательная выдача сигналов соответственно на первый вход первого 47 элемента И, первого 49 элемента НЕ, первый вход второго 48 элемента И, вход второго 50 элемента НЕ.
При этом между моментами поступления сигналов с первого и второго, третьего и четвертого выходов сдвигового регистра обеспечивается поступления сигналов с выхода генератора 51 импульсов через вторые входы первого 47 и второго 48 элементов И на входы соответственно первого 52 и второго 53 счетчиков.
С выходов первого 52 и второго 53 счетчиков сигналы поступают соответственно на первый и второй входы вычитающего устройства 54, кроме того, с выхода первого 52 счетчика сигнал поступает на вход первого 55 интегратора, с выхода которого сигнал поступает на второй вход сумматора 57, на первый вход которого сигнал поступает с выхода вычитающего устройства 54 через второй интегратор 56.
С выхода сумматора 57 сигнал поступает на первые входы первого 34, второго 35, третьего 36 и четвертого 37 ключей, на вторые входы одного из которых в зависимости от сектора нахождения цели относительно продольной оси ракеты поступают сигналы с одного из элементов И (18, 19, 20, 21).
С выходов одного из данных ключей (34, 35, 36, 37) сигнал поступает на один из входов электронного блока 6.
Таким образом, наряду с сектором нахождения цели определяется ее угловое положение в данном секторе, что в дальнейшем позволит электронному блоку 6 обеспечить концентрацию поля поражения боевой части в направлении на цель.
Блок 9 определения условий встречи ракеты с целью на основе информации об относительной скорости сближения ракеты с целью, классе цели, промахе ракеты относительно цели, углового положении диаграммы направленности антенной системы неконтактного радиометрического датчика цели, среднего направлении разлета осколков боевой части ракеты в статике, начальной скорости разлета осколков при взрыве в статике производит расчет задержки времени подрыва и при получении сигналов с одного из выходов приемных антенн 5 радиометрического неконтактного датчика выдает команду на подрыв боевой части ракеты в соответствии с вычисленным значением времени задержки.
С выхода блока определения условий встречи ракеты с целью сигнал поступает на четырнадцатый вход электронного блока 6, который выдает на устройство 13 команду на срабатывание предохранительно-исполнительного механизма 2б, радиально смещенного относительно оси заряда в сторону, противоположную стороне пролета цели, соответствующую экваториальному направлению передающего и приемного каналов 9б и 10б оптического многоканального датчика.
При этом обеспечивается совмещение поверхности срабатывания взрывателя с зоной опасных разрывов боевой части ракеты.
Таким образом, применение предлагаемого устройства позволит повысить эффективность боевого применения ракеты.
Способ распознавания цели и устройство для его осуществления
Способ определения параметров колебаний лопаток турбомашин и устройство для его осуществления
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ испытаний осколочных боеприпасов и стенд для его реализации
Способ определения характеристик осколочного поля снаряда и устройство для его осуществления
Способ распознавания цели и устройство для его осуществления
Способ испытания боеприпасов на аэроудар и устройство для его осуществления
Способ определения параметров колебаний лопаток турбомашин и устройство для его осуществления
Способ распознавания групповой цели и устройство для его осуществления
Автомобильная бортовая информационная система
Приемник простого импульсного сигнала
Способ оценки информационной эффективности системы связи
Способ распознавания цели и устройство для его осуществления
Способ распознавания импульсных радиосигналов в условиях мешающих радиоимпульсов на фоне белого шума
Способ фазовой модуляции и демодуляции высокочастотных сигналов и устройство его реализации
Способ амплитудной и фазовой модуляции, частотной и амплитудной демодуляции высокочастотных сигналов и многофункциональное устройство его реализации
Устройство для буксировки самолетов
Устройство выравнивания платформы подъемных механизмов
Устройство для измерения эффективной площади рассеяния крупногабаритных объектов
Аэродромный энергомодуль на топливных элементах

