Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ
Вид РИД
Изобретение
Изобретение относится к области использования навигационных и промерных эхолотов и может быть применено для их тарировки.
Известен способ тарировки навигационного эхолота (И.И. Федоров. Эхолоты и другие гидроакустические средства. Курс кораблевождения, т.5, книга 4. - Л.: Управление начальника Гидрографической службы ВМФ, 1960. - 332 с. [1]), включающий контрольную доску, представляющую собой хорошо отражающую ультразвуковые колебания площадку шириной в несколько десятков сантиметров и достаточной длины для того, чтобы ее можно было расположить горизонтально и одновременно под вибратором-излучателем и под вибратором-приемником. Доска опускается под вибраторы на тросах, разбитых марками для отсчета глубин. Проверка производится при отсутствии хода судна и спокойном состоянии моря, желательно при отсутствии течения. Контрольная доска подводится под вибраторы, а затем постепенно через определенные интервалы глубины опускается до максимально возможной глубины. На каждой глубине производится определение общей поправки эхолота путем сопоставления фактической глубины погружения доски (которая отсчитывается по маркам на тросах) и показаний эхолота (с учетом углубления вибраторов). Общая поправка эхолота определяется по следующей формуле

где Нд - глубина погружения контрольной доски;
Нвибр - углубление вибраторов;
Нэ - глубина, измеренная эхолотом.
В свою очередь, точность измерения глубины эхолотом Нэ зависит от конструктивных его особенностей и может быть повышена за счет введения поправок в измеренную глубину. К таким поправкам относятся (Судовые эхолоты. / Хребтов А.А. и др. - Л.: Судостроение, 1982, с.178-179 [2]):
ΔНс - поправка на отклонение скорости ультразвука в морской воде от предусмотренной конструкцией эхолота;
ΔНп - поправка на отклонение скорости вращения (числа оборотов) электродвигателя от предусмотренной конструкцией эхолота;
ΔHL - поправка на базу или расстояние между излучателем и приемником эхолота;
ΔНМО - поправка на место нуля отсчета;
ΔНα - поправка на угол α наклона дна в точке измерения глубин.
Эти поправки суммируются и вводятся в глубину Нэ, снимаемую с эхолота.
Контрольная доска обычно опускается на глубину не свыше 30 м, так как на больших глубинах затруднительно получить хорошо фиксированное положение контрольной доски под вибраторами, особенно при наличии течения или качки.
При определении общей поправки эхолота на контрольной доске автоматически учитываются погрешности разбивки шкалы, погрешность на базу и другие систематические погрешности.
Недостатком рассмотренного способа является то, что тарировка может производиться только до незначительных глубин и достаточно трудоемка.
Известен способ тарировки навигационного эхолота (И.И. Федоров. Эхолоты и другие гидроакустические средства. Курс кораблевождения, т.5, книга 4. - Л.: Управление начальника Гидрографической службы ВМФ, 1960. - 333 с. [3]), включающий контрольный вибратор, который представляет собой вибратор-приемник в кардановом подвесе и опускаемый на тросе с борта судна так, чтобы его рабочая поверхность была бы обращена вверх и оставалась горизонтальной. Трос разбивается марками для отсчета глубины погружения вибратора; разбивка марок производится от рабочей поверхности вибратора-приемника. К контрольному вибратору-приемнику присоединяются провода, которыми он подключается на вход усилителя вместо штатного вибратора-приемника. В остальном эхолот работает по своей нормальной схеме. Горизонтальное расстояние между штатным вибратором-излучателем и тросом контрольного вибратора-приемника должно быть возможно меньшим.
Общая поправка эхолота при определении ее по контрольному вибратору определяется из выражения

где НВП - глубина погружения контрольного вибратора-приемника;
НВИ - углубление судового вибратора-излучателя;
l - горизонтальное расстояние между судовым вибратором-излучателем и тросом контрольного вибратора-приемника.
При определении поправки эхолота с помощью контрольного вибратора не учитывается поправка на базу между судовым вибратором эхолота. Поэтому при измерении малых глубин к общей поправке эхолота, полученной по контрольному вибратору, в соответствии с формулой (2) должна быть еще добавлена поправка на базу между штатными вибраторами, которая может быть рассчитана по формуле (3)
где l - база между вибраторами.
Определение поправки эхолота с помощью контрольного вибратора практически может производиться при глубинах погружения этого вибратора до 150. Провода, идущие к контрольному вибратору-приемнику, должны быть хорошо экранированы во избежание помех.
Недостатком этого способа является сложность его реализации из-за необходимости подключения дополнительного вибратора-приемника, размещенного в кардановом подвесе, к усилителю эхо-сигналов взамен штатного приемника, а также осуществления тарировки без хода судна в районе без течений.
Известно также устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории, содержащее передатчик и измерительный приемный блок, подключенные соответственно к излучающей и приемной антеннам, регистратор и блок управления, соединенный с измерительным приемным блоком, базу с положительной и отрицательной плавучестью, с возможностью спуска ее на заданный горизонт тарирования и подъема до поверхности воды в вертикальном положении, на верхнем конце которой закреплены воспринимающие контакты реле, исполняющие контакты которого соединены с блоком управления, совместно с излучающей антенной, приемной антенной и датчиками гидростатического давления и температуры на нижнем конце базы и датчиками гидростатического давления и температуры на верхнем конце базы, выходы которых через блок управления соединены с входом блока определения поправок к глубинам, с возможностью излучения гидроакустического сигнала до поверхности по вертикали и приема отраженного от нее сигнала блоком определения поправок к глубинам, измеренным эхолотом, вход которого через блок управления соединен с выходом приемоизмерительного блока, а выход соединен с входом регистратора - на верхнем конце базы установлена антенна приемника спутниковой радионавигационной системы, на нижнем конце базы размещены излучающая и приемная антенны с излучением гидроакустических сигналов по нескольким лучам до поверхности дна акватории по вертикали и приема отраженных от нее сигналов по центральному и наклонным лучам, датчики горизонтальных и вертикальных перемещений удерживаемой базы и датчик измерения скорости звука, измеритель относительной скорости, магнитный компас и гироазимутгоризонткомпас, установленные в карданом подвесе, каналы спутниковой радионавигационной и гидроакустической связи, подключенные к блоку управления, а отрицательная плавучесть выполнена в виде бетонного секционного балласта, который сочленен с вертикальной базой по ее радиусу посредством ступенчатых строп с электрохимическими размыкателями (патент RU №2461021 С2, 10.09.2012 [4], аналогами которого являются патенты RU №2292062 С2, 20.01.2007 [5], RU №2272303 C1, 20.03.2006 [6], RU №2340916 C1, 10.12.2008 [7], RU №2326408 C1, 10.06.2008 [8], JP №10325871 A, 08.12.1998 [9], JP №4372890 A, 25.12.1992 [10]).
В известных способах для определения поправки эхолота [5-10], связанной с пространственной неоднородностью скорости звука в воде на глубинах до 30 м (согласно нормативным документам по съемке рельефа дна), необходимо производить сложное и трудоемкое действие - тарирование эхолота специальным тарирующим устройством. Причем данная операция должна осуществляться не менее двух раз в сутки (в начале и в конце съемки) с целью определения поправки эхолота. На акваториях с глубинами свыше 30 м должно осуществляться измерение на гидрологических станциях температуры, солености и давления воды или скорости распространения звука в воде специальным измерителем для определения поправки на отклонение действительной скорости звука в воде от расчетной и на рефракцию акустического луча эхолота.
При тарировании эхолота необходимо прекращать съемку и переходить на участок акватории съемки с наибольшими глубинами, где при нахождении судна на якоре или в дрейфе осуществлять погружение (подъем) с борта судна контрольной доски (диска) или приемного вибратора тарирующего устройства в рабочую зону излучающего вибратора эхолота на 10 фиксированных горизонтах тарирования. Погрешность определения поправок эхолота данным методом вследствие неучета изгиба троса под воздействием на погружаемый вибратор или тарирующую доску (диск) течения и дрейфа судна и глазомерного определения глубины горизонта тарирования по меткам на тросе может составлять 1-4% (Волков А.Е., Галошин А.И. и др. Руководство по использованию гидроакустических навигационных систем для определения места судна и подводных технических средств при выполнении морских геологоразведочных работ // СГФУ НПП по морским геологоразведочным работам. СПб, 1998 [11]).
Для определения с требуемой точностью поправок на изменения осадки судна на мелководье (на проседание судна) необходимо выполнить сравнительно большое число пробегов судна-носителя эхолота на разных глубинах, при различных скоростях и при различной осадке судна с целью получения данных для составления таблиц или номограмм.
Кроме того, необходимо определить группу инструментальных поправок к измеренным эхолотом расстояниям до дна, определение которых также характеризуется большой сложностью и трудоемкостью. Тарирование измеренных эхолотом наклонных расстояний выполняют путем сравнения значений глубин, измеренных центральным и боковыми лучами эхолота в идентичных точках в зоне полос обследования пересекающихся галсов (Дадашев А.А. Тарирование многолучевого эхолота на пересекающихся галсах // Записки по гидрографии. - 2000. - №251, с.42-46 [12]).
Так как расстояния, измеренные центральным зондирующим лучом, содержат большинство из перечисленных погрешностей, а точное совпадение точек отражения на дне, до которых измерены расстояния центральным и боковыми лучами, практически невозможно, то не обеспечивается достижение требуемого уровня точности съемки рельефа дна.
На глубинах акватории свыше 30 м поправка эхолота вычисляется как сумма частных поправок, получаемых в результате учета отдельных погрешностей: поправки на отклонение действительной скорости звука в воде от расчетной, поправки на рефракцию, поправки на отклонение частоты вращения электродвигателя от номинальной, поправки на место нуля эхолота, поправки на углубление вибраторов, поправки на наклон дна.
В устройстве для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории [4], техническим результатом изобретения является повышение достоверности определения поправок, что достигается тем, что известное устройство содержит многолучевой эхолот, регистратор, блок управления, блок определения поправок, измерительный приемный блок с антенной, передатчик с антенной, датчики измерения скорости звука, измерительный приемный блок с антенной, передатчик с антенной, датчики температуры воды, датчики гидростатического давления, реле, канал связи спутниковой радионавигационной системы, датчики горизонтальных и вертикальных перемещений, магнитный компас, гироазимутгоризонткомпас, гидроакустический канал связи, измеритель относительной скорости, что выгодно отличает его от аналогов.
Сущность работы известного устройства заключается в следующем.
Перед съемкой рельефа дна на акватории выбирают места для выполнения тарирования эхолота, в которых судно устанавливают на якорь или оставляют в дрейфе.
Посредством судового спускоподъемного устройства вертикальную базу опускают за борт в воду с учетом того, чтобы приемопередающая антенна спутникового радионавигационного канала связи оставалась над поверхностью воды. По сигналам с судового измерительного комплекса запускают в работу блок управления и канал связи спутниковой радионавигационной системы, по которой определяют начальные координаты вертикальной базы. После этого продолжают спуск вертикальной базы и в момент соприкосновения с водой воспринимающих контактов реле исполнительные контакты реле замыкают в блоке управления электрические цепи формирования импульсов запуска передатчиков и многолучевого эхолота. Одновременно по сигналам с судового измерительного комплекса по гидроакустическому каналу связи подаются сигналы на блок управления для запуска в работу остальных средств измерения. Посредством механизмов судового спускоподъемного устройства вертикальную базу опускают на заранее установленные глубины и выполняют измерения регистрацию сигналов на 3-5 горизонтах по глубине. Затем освобождают вертикальную базу от удерживающего ее троса, и она под действием отрицательной плавучести начинает погружаться в сторону дна. В процессе погружения вертикальной базы производится измерение скорости распространения звука, расстояний до дна и поверхности акватории, относительной скорости и угла дрейфа при погружении и всплытии вертикальной базы, курса, крена и дифферента, линейных и угловых скоростей и ускорений, температуры воды и давления. Измеренные величины по каналу гидроакустической связи транслируются в судовой измерительный комплекс, с которого при достижении дна вертикальной базой на блок управления подается сигнал на всплытие. При этом с блока управления подается сигнал на электрохимические размыкатели. При этом на размыкатели подается электрический сигнал, под действием которого электрохимические размыкатели растворяются в морской воде, освобождая при этом стропы, которые, в свою очередь, освобождают пластины. Пластины освобождаются от строп постепенно, что позволяет замедлить всплытие вертикальной базы. При всплытии вертикальной базы на поверхность посредством спутниковой радионавигационной системы определяют ее координаты. В процессе всплытия также осуществляются измерения.
По полученным массивам измерений, выполненных при погружении вертикальной базы до дна, при нахождении ее на дне и при ее всплытии на поверхность определяют поправки тарирования.
Посредством приемника спутниковой радионавигационной системы типа GPS или "Глонасс" в моменты погружения и всплытия вертикальной базы определяют геодезические координаты x0n, y0n и x0b, y0b соответственно. При обработке сигналов, полученных посредством гироазимутгоризонткомпаса, магнитного компаса, измерителя относительной скорости, датчиков линейных и угловых скоростей и ускорений, определяют текущие геодезические счислимые координаты, крен, дифферент, азимут направления полосы зондирования гидроакустических сигналов до поверхности акватории приемоизлучающей антенной многолучевого эхолота, скорость распространения звука в воде в районе распространения данной антенны. Определяют на i горизонте по каждому j лучу глубину погружения приемоизлучающей антенны и его геодезические координаты, акустическим путем, а затем вычисляются искомые значения поправок к глубинам и к их геодезическим координатам для i-х горизонтов в полосе зондирования многолучевого эхолота по формулам.
Известное устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории [4], наряду с его достоинствами обладает и существенным недостатками, заключающимися в повышенных трудозатратах при проведении тарировки эхолота, выполнении многочисленных вычислений, а также ограничениями, обусловленными гидрологическими условиями.
Задачей предлагаемого технического решения является повышение точности тарирования эхолотов и снижение трудозатрат на ее проведение.
Поставленная задача достигается тем, что для тарировки эхолота предлагается использовать лазерное тарирующее устройство (ЛТУ), работающее в сине-зеленом диапазоне частотного спектра излучения. Лазерный импульс в этом диапазоне способен проникать сквозь водную среду и, отразившись от дна, приниматься фотоприемным устройством. Зная скорость прохождения лазерного излучения через воду и время прохождения прямого и отраженного сигнала, представляется возможным определить глубину места под судном с более высокой точностью, чем навигационным эхолотом.
Дело в том, что:
- скорость света в воде более чем в 150000 раз выше скорости звука и по этой причине на ее распространение практически не влияют течения и различия в водных слоях по глубине в районе тарировки;
- нет необходимости использования тарировочного устройства или вибратора-приемника в кардановом подвесе, глубина погружения которых определяется достаточно приближенно;
- диаграмма направленности лазерного излучения (1-2 угл. с) во много раз уже диаграммы направленности эхолота (20-40 град) и по этой причине поправка на наклон дна в месте излучения может не учитываться, что существенно повышает точность измерения глубины ЛТУ. В этом случае ЛТУ является эталоном.
ЛТУ может быть установлено в днище судна или вынесено с помощью внешней штанги за борт судна. Лазерное тарирующее устройство, состоящее из источника лазерного излучения и приемника, должно находиться под водой на уровне вибраторов эхолота. В этом случае гарантировано отсутствие преломления лазерного луча при переходе из одной среды его распространения в другую. Лазерный импульс направляется перпендикулярно водной поверхности, как и эхо-импульс эхолота.
Установлено, что затухания излучения лазеров в морской воде в значительной степени зависят от ее состава и наличия в ней взвешенных частиц, а также от длины волны лазерного излучения λ. Минимальные значения показателя ослабления χ лазерного излучения находятся примерно в области λ=0,5 мкм. При этом в воде без взвесей, ослабление почти полностью определяется поглощением, которое примерно одинаково для всех водных бассейнов и имеет характерную зависимость от λ. Интенсивность же рассеянного излучения практически не зависит от λ (Климков Ю.М. Основы расчета оптико-электронных приборов с лазерами. - М.: Советское радио, 1978. - 264 с.).
Из-за большой величины показателя ослабления дальность действия ЛТУ слабо зависит от мощности излучателя и шумов приемника. Расчет дальности действия ЛТУ можно осуществить по формуле:
где Р, Рш - соответственно мощность излучателя и шума приемника;
q - заданная величина отношения сигнал/шум.
Сигнал на частоте 0,532 мкм мощностью от 2 до 8 мДж проходит через водную толщу под килем судна и отражается дном. Отраженные лазерные импульсы дном попадают на вход оптической системы приемника, фиксирующей отраженный свет на светочувствительный элемент системы. Все отраженные импульсы регистрируются приемной аппаратурой для последующей обработки и интерпретации возможных помех в принимаемых сигналах. Наиболее существенным ограничением системы является прозрачность воды, которая определяет максимальную измеряемую глубину. Помимо этого наибольшая измеряемая глубина зависит от мощности измеряемого импульса, ширины полосы пропускания оптической системы приемника, его апертуры, поля зрения и оптической эффективности системы, уровня шума приемных цепей и отражательных характеристик дна. Значение глубины может быть рассчитано по формуле:
где с - скорость света;
t - время распространения сигнала в воде;
n -коэффициент рефракции;
θ - угол падения лазерного луча.
Максимальная измеряемая глубина определяется прозрачностью воды и при съемке днем составляет 4/k, а при съемке ночью - 5/k. Здесь k - показатель вертикального ослабления света, который для типовых прибрежных вод составляет 0,1-0,3 м-1.
Расчет потенциальных характеристик (дальности действия) ЛТУ может быть выполнен по формулам для оценочных расчетов энергетических характеристик, определяющих дальность действия ЛТУ, работающего в режиме односторонней передачи импульсов и в режиме локационного зондирования дна моря с подводной части судна.
Вариант 1 ЛТУ: лазерный излучатель установлен на судне, а приемник лазерных излучений опускается на заданную глубину.
В этом случае энергия излучения ЛТУ может быть рассчитана по формуле:
 .
.
Вариант 2 ЛТУ: лазерный излучатель и приемник установлен на судне и используется отражение лазерного сигнала от дна.
В этом случае энергия излучения ЛТУ может быть рассчитана по формуле:

где Еизл - требуемая энергия излучения передатчика (Еизл=τ·Ризл, τ - длительность импульса, Р - импульсная мощность).
Для существующих твердотельных лазеров на аллюмоиттриевом гранате, стекле и т.п.
Еизл=(0,1÷10) Дж, для оценки можно брать Еизл≈1 Дж; τ=1÷20 нс;
Emin - чувствительность приемника (Emin=τ·Pmin, τпр≥τ; Emin≥4·10-19 Дж;
Pmin=(10-10÷10-8) Вт);
θ - расходимость излучения лазерного передатчика (в радианах), для работы по дну можно принять θ≈10-5.
В случае односторонних измерений θ определяется точностью взаимного наведения σθ, т.е. θ≈(3÷5)σθ(θ≈(1÷3)10-3) можно принять θ≈10-3.
ηпр - квантовая эффективность приемника;
ηопт - пропускание оптики;
ηпр·ηопт=(0,05÷0,1) (можно принять ≈ 0,07);
l - глубина в метрах;
ξ - интегральное ослабление излучения в воде (1/м).
Для океанской воды - ξ=(0,007÷0,10) м-1.
Для шельфов - ξ=(0,01÷0,2) м-1; (можно считать ≈ 0,1);
ρ - интегральный коэффициент отражения от дна
ρ=(0,2÷0,8) (можно считать ρ≈0,5);
Sпр - эффективная площадь приемного объектива Sпр≤πR2,
где R - радиус иллюминатора R=(0,1÷0,25) м.
При работе по дну без наведения R≈0,15 м.
Если нужно перенацеливаться через неподвижный относительно судна иллюминатор R≤0,1 м.
При использовании опорно-поворотного устройства, в котором кожух и иллюминатор вращаются вместе с приемо-передатчиком, радиус иллюминатора равен R=(0,1÷0,15) м. Предельную глубину измерений с точностью (10-15) % можно рассчитать, исходя из следующих соображений.
В реальных системах - Emin=10-15÷10-17 Еизл, т.е. можно считать допустимым потерю 16-ти порядков излученного сигнала. Эти потери определяются двумя факторами:
- потерей плотности излучения из-за расходимости пучка;
- рассеянием и поглощением света в воде.
При малых дальностях (сотнях метров, вариант 1) в случае одностороннего связного режима расходимость мало влияет на потери излученного сигнала, например, если l=100 м, то пучок расширяется на величину θ·100≤0,1 м, т.е. при идеальном наведении весь пучок можно перехватить приемным объективом, однако на всякий случай следует скидывать один порядок на проблемы с наведением.
Ослабление в воде характеризуется экспонентой е-ξl, почти всегда можно считать, что ξ≤0,1, т.е. на каждых 10 м интенсивность излучения уменьшается примерно в 3 раза, а на 20 м - на порядок, соответственно на 40 м - на два порядка, на 100 м - на пять порядков. Таким образом «запас» в шестнадцать порядков будет исчерпан на глубине 20·15=300 м (множитель 15, а не 16, т.к. один порядок, т.е. 90% излучения составляет запас на неточность наведения). В двустороннем (локационном) режиме, отраженный дном сигнал рассеивается в полусферу. В случае перехвата объективом 0,1 м2 потока (диаметр приемной оптики около 30 см) потери отраженного сигнала на 100 м составят 4π·l2·Sпр=4π·104·10-1≈106 (т.е. шесть порядков).
При l=200 м, соответственно в  больше и т.д. Таким образом, если l=100 м, то в двустороннем режиме 10 порядков теряются за счет двустороннего распространения в воде, 6 порядков за счет расходимости отраженного сигнала. Предполагаются также дополнительные потери при отражении от дна, для компенсации которых следует увеличить диаметр приемного объектива, и таким образом можно спроектировать подводный лазерный дальномер с дальностью 100 м в относительно прозрачной и прибрежной воде.
больше и т.д. Таким образом, если l=100 м, то в двустороннем режиме 10 порядков теряются за счет двустороннего распространения в воде, 6 порядков за счет расходимости отраженного сигнала. Предполагаются также дополнительные потери при отражении от дна, для компенсации которых следует увеличить диаметр приемного объектива, и таким образом можно спроектировать подводный лазерный дальномер с дальностью 100 м в относительно прозрачной и прибрежной воде.
Для океана можно принять ξ≈0,01 м-1 и в этом случае связная дальность увеличивается почти в десять раз (max l≈3 км), а локационная дальность может быть доведена до нескольких сотен метров (например, если l=800 м, потери за счет ослабления в воде могут составить 8 порядков, за счет расходимости отраженного сигнала в 6,4·107 раз при 30-сантиметровом объективе и около 2·107 раз при полупроводником лазере).
Сущность предлагаемого технического решения поясняется чертежом.
Фиг.1. Блок-схема устройства, где позициями обозначены: 1 - судно, 2 - передатчик, 3 - измерительный приемный блок, 4 - излучающая антенна, 5 - приемная антенна отраженного от морского дна эхо-сигнала, 6 - регистратор, 7 - блок управления, 8 - блок определения поправок к глубинам, 9 - измеритель относительной скорости, 10 - магнитный компас, 11 - гироазимутгоризонткомпас, 12 - штанга, 13 - передающая система, 14 - фотоприемная антенна, 15 - блок управления и запуска, 16 - блок вторичной обработки отраженного лазерного сигнала, 17 - блок первичной обработки отраженного лазерного сигнала, 18 - процессор, 19 - защитный кожух, 20 - иллюминатор, 21 - датчик гидростатического давления, 22 - датчик температуры, 23 - водная поверхность, 24 - морское дно, 25 - приемоиндикатор спутниковой навигационной системы, 26 - измеритель скорости распространения звука в воде, hэ - глубина измеренная эхолотом, hл - глубина измеренная ЛТУ.
Устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории, содержит передатчик и измерительный приемный блок, подключенные соответственно к излучающей и приемной антеннам, регистратор и блок управления, соединенный с измерительным приемным блоком, базу с датчиками гидростатического давления и температуры, выходы которых через блок управления соединены с входом блока определения поправок к глубинам, измеренным эхолотом, вход которого через блок управления соединен с выходом приемоизмерительного блока, а выход соединен с входом регистратора 6, датчики горизонтальных и вертикальных перемещений, датчик измерения скорости распространения звука в воде, измеритель относительной скорости, магнитный компас и гироазимутгоризонткомпас, приемоиндикатор спутниковой навигационной системы, в котором, в отличие от прототипа, база установлена на выносной штанге параллельно днищу судна и жестко сочленена с корпусом судна, приемопередающий блок, установленный на базе, выполнен в виде лазерного излучателя и оптического приемника.
Устройства 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 21, 22, 25 и 26 и их принцип действия аналогичны устройствам прототипа.
ЛТУ работает следующим образом. Для достижения синхронизации блок управления тарируемого эхолота одновременно запускает и блок управления и запуска 15 лазерного излучателя. Лазерный импульс на частоте 0,532 мкм посредством передающей системы 13 направляется по фиксируемому направлению перпендикулярно дну моря 24. Для учета временного расширения луча и освещаемой на дне площади необходимо знание гидрооптических характеристик воды в районе тарирования эхолота. Для их оценки предполагается использовать информацию об объемном рассеянии воды, которую содержит отраженный лазерный импульс. С этой целью ЛТУ может решать и такую задачу.
Отраженные лазерные импульсы морским дном 24 принимаются фотоприемной антенной 14. Все отраженные импульсы регистрируются для последующего усиления в усилителях лазерных отраженных сигналов, их обработки и интерпретации возможных помех в принимаемых лазерных сигналах. После обработки лазерные сигналы поступают на вход процессора 18, где происходит их дальнейшая обработка и расчет измеренной глубины. Расстояние от ЛТУ до дна вычисляется по измеренному времени между моментами прихода отраженных импульсов и известной скорости света в воде с учетом задержек сигналов в электронных цепях, прозрачности воды и рассеяния света на взвешенных частицах вещества в водной толще.
Предлагаемый способ обеспечивает увеличение глубины тарирования и получение глубины тарирования с нормированными метрологическими характеристиками. Промышленная применимость предлагаемого способа и устройства для его осуществления технической трудности не представляет, так как при их реализации могут быть использованы серийно освоенные измерительные и программные средства.
Источники информации
1. И.И. Федоров. Эхолоты и другие гидроакустические средства. Курс кораблевождения, Т.5, книга 4. - Л.: Управление начальника Гидрографической службы ВМФ, 1960. - 368 с.
2. Судовые эхолоты. / Хребтов А.А. и др. - Л.: Судостроение, 1982, с.178-179.
3. И.И. Федоров. Эхолоты и другие гидроакустические средства. Курс кораблевождения, т.5, книга 4. - Л.: Управление начальника Гидрографической службы ВМФ, 1960. - 368 с.
4. Патент RU №2461021 С2, 10.09.2012.
5. Патент RU №2292062 C2, 20.01.2007.
6. Патент RU №2272303 C1, 20.03.2006.
7. Патент RU №2340916 C1, 10.12.2008.
8. Патент RU №2326408 C1, 10.06.2008.
9. Патент JP №10325871 A, 08.12.1998.
10. Патент JP №4372890 A, 25.12.1992.
11. Волков А.Е., Галошин А.И. и др. Руководство по использованию гидроакустических навигационных систем для определения места судна и подводных технических средств при выполнении морских геологоразведочных работ // СГФУ НПП по морским геологоразведочным работам. СПб, 1998.
12. Дадашев А.А. Тарирование многолучевого эхолота на пересекающихся галсах. // Записки по гидрографии. - 2000. - №251, с.42-46.
Устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории, содержащее передатчик и измерительный приемный блок, подключенные соответственно к излучающей и приемной антеннам, регистратор и блок управления, соединенный с измерительным приемным блоком, базу с датчиками гидростатического давления и температуры, выходы которых через блок управления соединены с входом блока определения поправок к глубинам, измеренным эхолотом, вход которого, через блок управления соединен с выходом приемоизмерительного блока, а выход соединен с входом регистратора, датчики горизонтальных и вертикальных перемещений, датчик измерения скорости распространения звука в воде, измеритель относительной скорости, магнитный компас и гироазимутгоризонткомпас, приемоиндикатор спутниковой навигационной системы, отличающееся тем, что база установлена на выносной штанге параллельно днищу судна и жестко сочленена с корпусом судна, приемопередающий блок, установленный на базе, выполнен в виде лазерного излучателя и оптического приемника.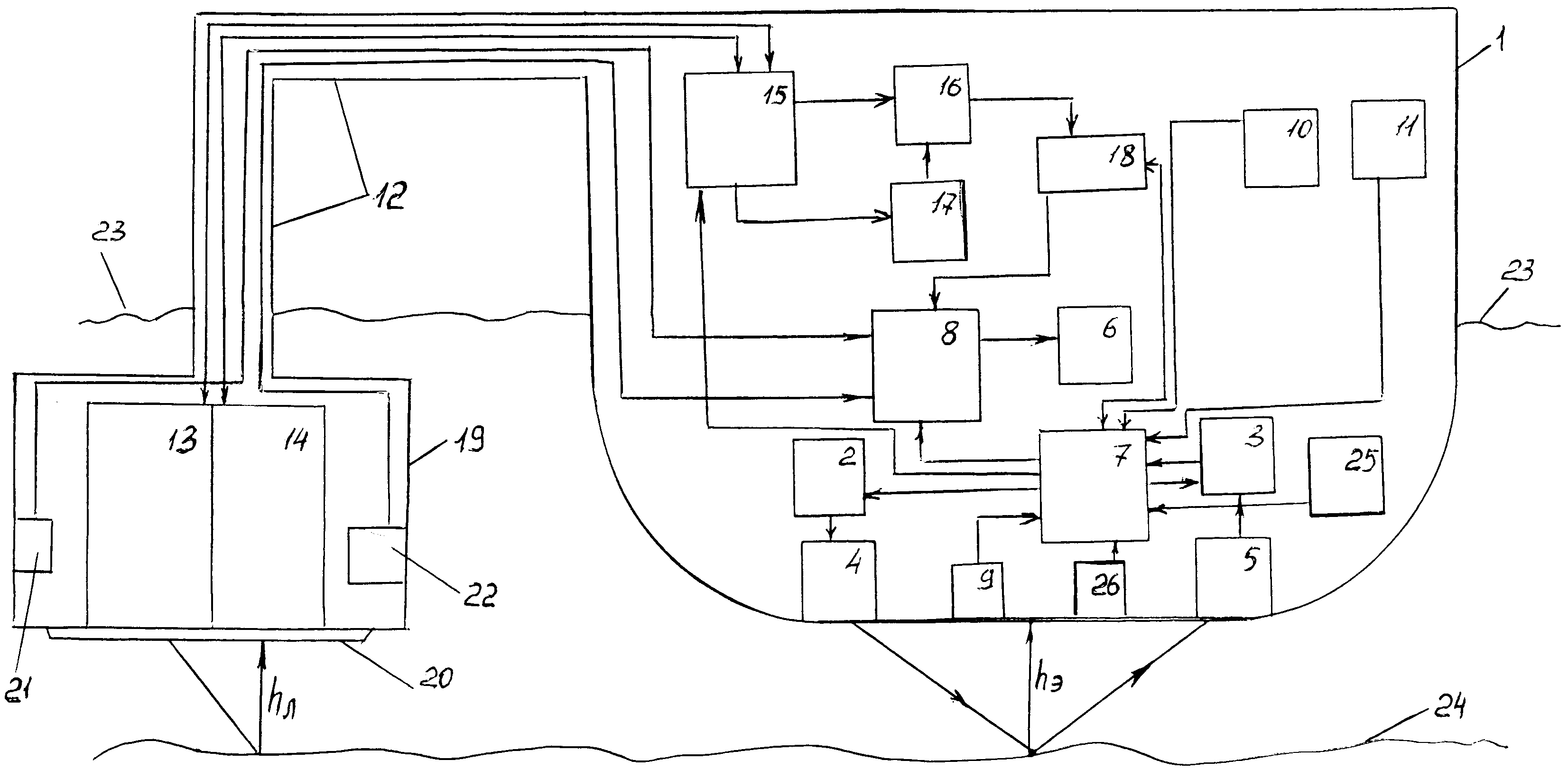
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ активной борьбы с айсберговой опасностью и устройство для активной борьбы с айсберговой опасностью
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ активной борьбы с айсберговой опасностью и устройство для активной борьбы с айсберговой опасностью

