Результат интеллектуальной деятельности: ТРАНСПОРТНОЕ СРЕДСТВО, ИМЕЮЩЕЕ ПЕРЕКЛЮЧАЕМЫЙ ПРИВОД НА ЧЕТЫРЕ КОЛЕСА
Вид РИД
Изобретение
Настоящее изобретение относится к транспортному средству, в котором крутящий момент от двигателя транспортного средства выборочно прикладывается к передним или задним колесам. Обычно, транспортные средства этого типа имеют систему сцеплений, сформированную, по меньшей мере, из двух сцеплений, по меньшей мере, одно из которых может размыкаться и смыкаться водителем, чтобы переключаться между режимом привода на передние колеса (или режимом привода на задние колеса) и режимом привода на четыре колеса.
Хотя первоначально задумывалось для вождения вне дорог, обнаружилось, что привод на четыре колеса может быть полезным также и для движения по дороге, поскольку автомобиль становится менее чувствительным к проблемам вроде избыточной поворачиваемости или недостаточной поворачиваемости в зависимости от скорости, которые являются обычными для транспортных средств с приводом на передние или задние колеса. Однако преимущества улучшенной управляемости транспортных средств с приводом на четыре колеса порой перевешиваются их расходом топлива, который, как правило, выше, чем расход похожего транспортного средства с приводом на два колеса, из-за возросшей массы вращающихся элементов и возросших потерь на трение. Водитель, которому требуется повышенная управляемость привода на четыре колеса, таким образом, постоянно наказывается высоким расходом топлива, тогда как водитель, который практикует экономичный стиль вождения, должен соглашаться с риском недостаточно оптимальной управляемости.
Целью настоящего изобретения является создание транспортного средства, способа управления системой сцеплений в транспортном средстве и программного продукта для процессора данных, которые позволяют объединять улучшенную управляемость привода на четыре колеса с экономичной работой привода на передние или задние колеса.
Эта цель достигается, согласно первому аспекту изобретения, созданием транспортного средства, имеющего двигатель, передние и задние колеса и систему сцеплений для выборочного распределения крутящего момента двигателя на передние и задние колеса с контроллером для определения в реальном времени режима движения транспортного средства и управления распределением крутящего момента посредством системы сцеплений в соответствии с определяемым режимом.
На основании этого определения распределение крутящего момента на передние и задние оси непрерывно адаптируется к текущим условиям движения, и использование привода на четыре колеса может быть ограничено ситуациями, где оно является действительно полезным.
Управление распределением крутящего момента предпочтительно выполняется контроллером, выбирающим один из множества заданных дискретных коэффициентов распределения. В этом способе, если существуют другие параметры ходовой части транспортного средства помимо распределения крутящего момента, которые также адаптируются в соответствии с определяемым режимом движения, число возможных комбинаций значений распределения крутящего момента и упомянутого другого параметра(ов) является конечным, и каждая комбинация может быть проверена на безопасность в эксплуатации, и выбор опасной комбинации параметров может быть легко предотвращен.
Контроллер должен быть выполнен с возможностью определения различий, по меньшей мере, между режимом с высоким ускорением и режимом с низким ускорением.
В режиме с высоким ускорением, являющимся более чувствительным к избыточной или недостаточной поворачиваемости, крутящий момент, передаваемый системой сцеплений, должен распределяться более равномерно между передними и задними колесами, т.е. должен быть скорее приводом на четыре колеса, чем в режиме низкого ускорения.
Чтобы предотвратить пробуксовку колес транспортного средства, в частности, в случае высокого продольного ускорения, контроллер предпочтительно выполнен с возможностью приложения большей части крутящего момента к задним колесам в режиме с высоким ускорением, чем в режиме с низким ускорением.
Вообще говоря, режим с высоким ускорением может быть определен как существующий, если удовлетворяется, по меньшей мере, одно из следующих условий:
- поперечное ускорение транспортного средства превышает заданное пороговое значение;
- продольное ускорение транспортного средства превышает заданное пороговое значение;
- скорость бокового скольжения транспортного средства превышает заданное пороговое значение;
- скорость изменения угла поворота рулевого колеса превышает заданное пороговое значение;
- скорость изменения положения педали акселератора или положения дросселя или скорость расхода топлива превышают заданное пороговое значение;
- транспортное средство находится в режиме торможения двигателем.
По меньшей мере, в последних трех случаях величина ускорения в момент определения может быть все еще небольшой, но специалисту ясно, что реальное ускорение, вероятно, должно вскоре произойти, если быстро поворачивается рулевое колесо или быстро отпускается педаль акселератора. В режиме торможения двигателем должно ожидаться ускорение с отрицательным знаком.
Кроме того, контроллер предпочтительно выполнен с возможностью определения различий между режимом движения с высокой скоростью и режимом движения с низкой скоростью и распределения крутящий момент, передаваемого системой сцеплений, между передними и задними колесами более равномерно в режиме движения с низкой скоростью, чем в режиме движения с высокой скоростью. Прикладывая вращающий момент к передним и задним колесам, пока транспортное средство движется медленно или остается неподвижным, начало движения и ускорение транспортного средства на скользкой поверхности облегчается.
Согласно второму аспекту изобретения цель достигается способом управления системой сцеплений в транспортном средстве для выборочного распределения крутящего момента двигателя на передние и задние колеса транспортного средства, в котором определяют в реальном времени режим движения транспортного средства и управляют в соответствии с определяемым режимом распределением крутящего момента посредством системы сцеплений.
Изобретение может быть осуществлено посредством программного продукта для процессора данных, содержащего носитель данных, на котором записаны в машиночитаемой форме программные инструкции, позволяющие процессору данных сформировать описанный выше контроллер или выполнить вышеупомянутый способ.
Дополнительные признаки и преимущества изобретения станут очевидны из последующего описания вариантов его осуществления со ссылкой на прилагаемые чертежи.
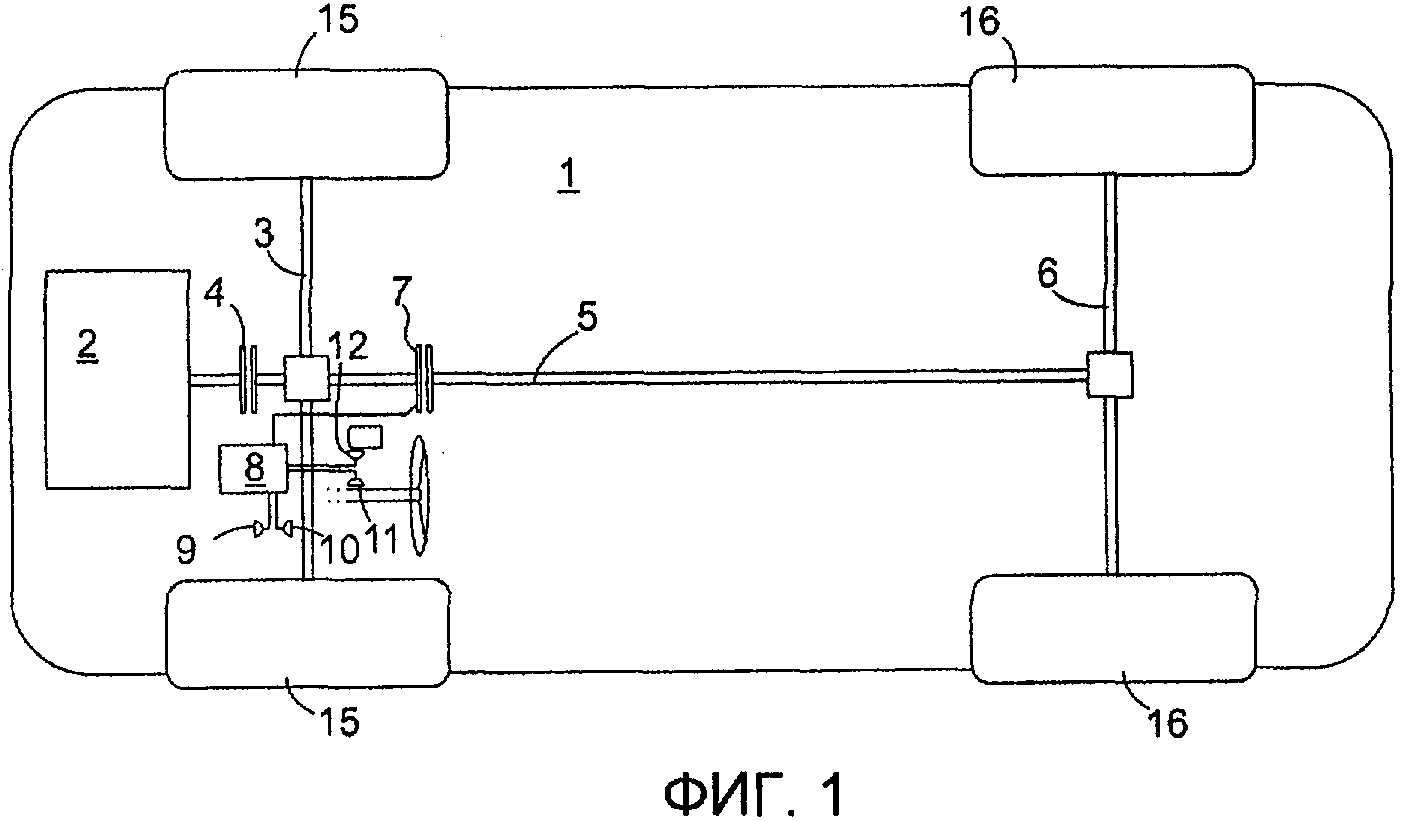
Фиг. 1 представляет собой блок-схему транспортного средства согласно первому варианту осуществления изобретения;
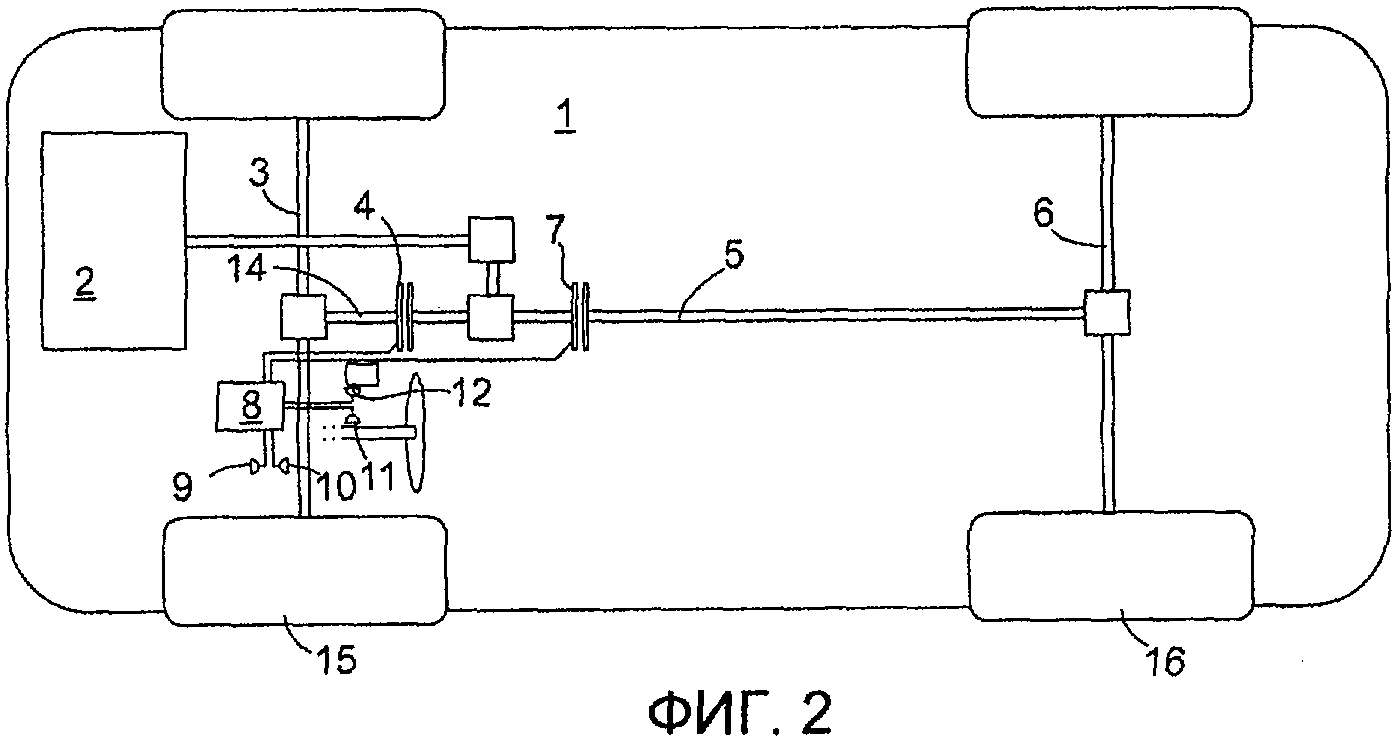
Фиг. 2 представляет собой блок-схему транспортного средства согласно второму варианту осуществления изобретения;
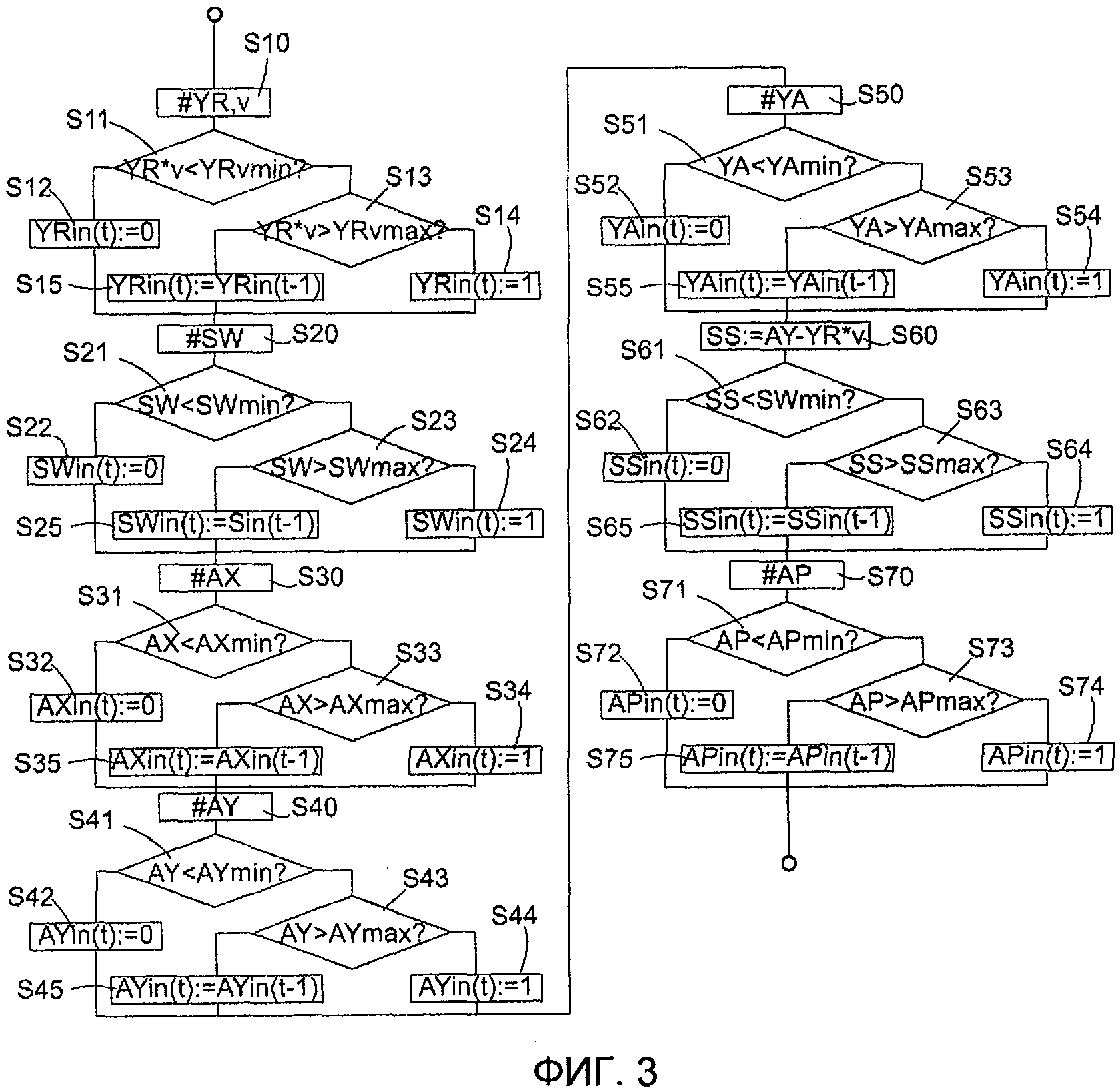
Фиг. 3 представляет собой блок-схему первой части процесса управления, выполненного контроллером транспортного средства, показанного на фиг. 1 или 2;
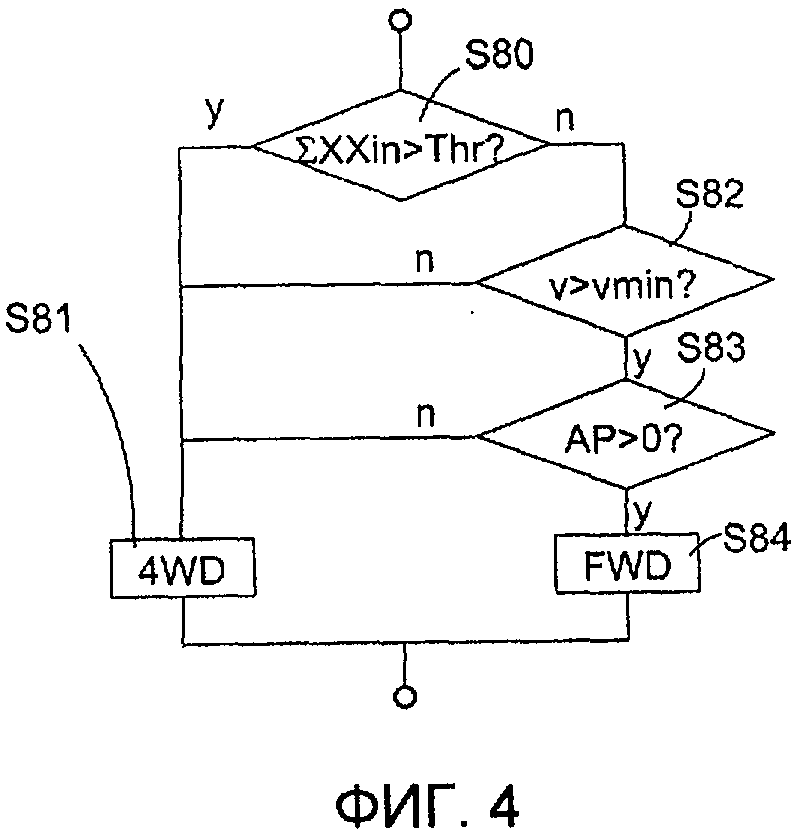
Фиг. 4 представляет собой блок-схему второй части процесса согласно первому альтернативному варианту; и
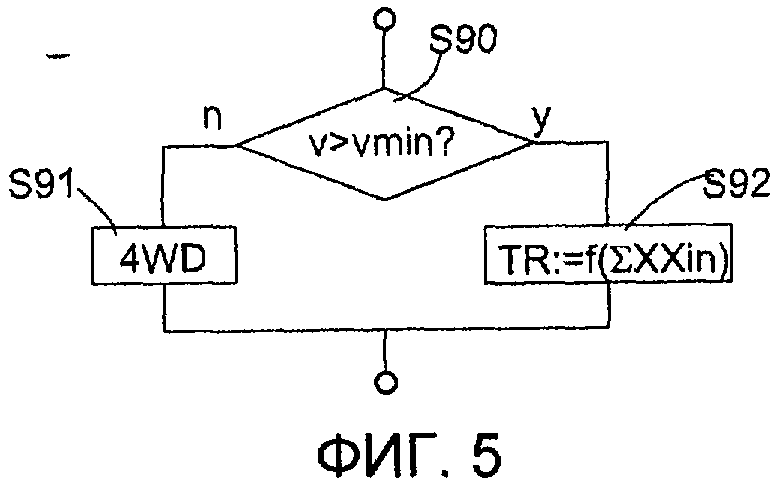
Фиг. 5 представляет собой блок-схему второй части процесса согласно второму альтернативному варианту.
В блок-схеме на фиг. 1 двигатель 2 внутреннего сгорания транспортного средства 1 приводит в движение колеса 15 передней оси 3 через первое сцепление 4. На ведущем валу 5 между передней осью 3 и задней осью 6 предусмотрено второе сцепление 7. Если второе сцепление 7 разомкнуто, транспортное средство приводится только передними колесами 15; если оно замкнуто, дополнительно приводятся задние колеса 16. Соотношение между крутящим моментом, прикладываемым к передним колесам 15, и моментом, прикладываемым к задним колесам 16, зависит от силы смыкания, приложенной к сцеплению 7. В то время как сцепление 4 может находиться исключительно под управлением водителя, сцепление 7 управляется электронным блоком 8 управления на основании сигналов от множества датчиков, таких как датчик 9 ускорения, датчик 10 угловой скорости рыскания, датчик 11 угла поворота рулевого колеса или датчик 12 педали акселератора. Датчик 12 педали акселератора может быть заменен датчиком заслонки всасываемого воздуха, не показан, или сигналом расхода подачи топлива от электронного контроллера двигателя, не показан, так как положение заслонки или расход топлива обычно непосредственно управляются на основании положения педали акселератора.
Схема трансмиссии на фиг. 2 отличается от показанной на фиг. 1 в том, что двигатель приводит два ведущих вала 5, 14 через межосевой дифференциал 13. Передний ведущий вал 14 содержит сцепление 4, задний ведущий вал 5 содержит сцепление 7. В зависимости от состояния замыкания сцеплений 4, 7, задаваемого схемой 8 управления, возможно приложить крутящий момент двигателя только к передней оси 3, только к задней оси 6 или установить любой произвольный коэффициент распределения крутящего момента между двумя осями 3, 6.
Процедура управления, выполняемая электронным блоком 8 управления, аналогична для двух схем трансмиссии на фиг. 1 и 2 и будет описана подробно со ссылкой на фиг. 3-5.
Фиг. 3 имеет отношение к первой части процесса управления, в которой определяют текущий режим движения транспортного средства 1. Эта первая часть процесса может быть подразделена на ряд стадий, каждая из которых связана с конкретным параметром движения транспортного средства 1.
В схеме на фиг. 3 первая стадия связана с угловой скоростью рыскания YR. Ее определяют посредством датчика 10 на этапе S10. Этап S11 вычисляет произведение угловой скорости рыскания YR и текущую продольную скорость v транспортного средства и сравнивает его с первым пороговым значением YRvmin. YR*v является показателем поперечного ускорения, которому транспортное средство подвержено, если оно едет по изгибу дороги с угловой скоростью рыскания YR и скоростью v и не имеет избыточную или недостаточную поворачиваемость. Если YR*v найдено меньшим, чем первое пороговое значение YRvmin, указывающее, что транспортное средство движется в повороте медленно, и не существует риска избыточной или недостаточной поворачиваемости, показатель YRin(t) в настоящий момент t устанавливается на нуль на этапе S12. Иначе, YR*v сравнивается со вторым, более высоким пороговым значением YRvmax на этапе S13. Если это пороговое значение превышено, показатель YRin(t) устанавливается в один на этапе S14, а если нет, он сохраняется в значении YRin(t-1), которое он принял в предыдущей итерации процесса на этапе S15.
Вторая стадия, включающая этапы S20 по S25, оперирует с производной SW по времени угла поворота рулевого колеса, определенного датчиком 11. Если величина производной SW определена более низкой, чем первое пороговое значение SWmin, на этапе S21, поперечные силы, действующие на транспортное средство, не рассматриваются как существенно изменяющиеся, и показатель SWin(t) рулевого колеса устанавливается в ноль на этапе S22. Если нет, производная SW сравнивается со вторым, более высоким пороговым значением SWmax на этапе S23, и, если пороговое значение превышено, этап S24 устанавливает показатель SWin(t) в один. Иначе, показатель остается неизменным (этап S25).
Как можно легко увидеть из фиг. 3, этапы S30 по S35, S40 по S45, S50 по S55, S60 по S65 и S70 по S75 все аналогичны этапам S20 по S25, разница только в параметре движения, который измеряется или вычисляется и затем определяется на различных стадиях. На этапах S30 по S35 им является продольное ускорение AX, которое измеряется датчиком 9 ускорения или получается как производная по времени сигнала от спидометра; на этапах S40 по S45 им является поперечное ускорение AY, определенное датчиком 9 ускорения, на этапах S50 по S55 им является угловое ускорение рыскания YA, т.е., производная по времени от YR, на этапах S60 по S65 им является скорость SS бокового скольжения, вычисленная на этапе S60 формированием разницы поперечного ускорения AY и YR*v, а на этапах S70 по S75 им является производная AP по времени положения педали акселератора, определенного датчиком 12.
Специалисту будет понятно, что порядок стадий на фиг. 3 является произвольным, и что необязательно определять все показатели, показанные на фиг. 3, и что в упрощенном варианте осуществления способа любой поднабор этих показателей может оказаться достаточным.
Во второй части процесса, согласно блок-схеме на фиг. 4, показатели оцениваются на этапе S80. Оценка на этапе S80 записывается, как правило, как ΣXXin>Thr, где XX - параметры YR, SW, AX, AY, YA, AP движения, описанные в отношении фиг. 3, а Σ - сумма показателей, полученных в первой части процесса. Установка Thr=1 эквивалентна логическому сложению показателей: если только один из показателей равен 1, условие этапа S80 удовлетворяется, и блок 8 управления управляет сцеплениями, чтобы установить режим привода на четыре колеса на этапе S81. Если пороговое значение Thr не превышено, процесс ответвляется к этапу S82, на котором текущая продольная скорость v сравнивается с нижним пороговым значением vmin, которое может быть в диапазоне 10 км/ч или даже меньше. Если скорость v ниже этого порогового значения, транспортное средство расценивается как находящееся в состоянии начала движения. Здесь существует определенный риск того, что колеса транспортного средства буксуют, если транспортное средство начинает движение на скользкой, например, рыхлой или замерзшей, поверхности, так что процесс также входит в режим привода на четыре колеса на этапе S81. Только если скорость v выше порогового значения vmin, процесс переходит к этапу S83, на котором проверяется положение AP педали акселератора. Если она отпущена, так же как и педаль сцепления отпущена, блок 8 управления делает вывод о том, что транспортное средство находится в режиме торможения двигателем, и ответвляется к этапу S81, так что все четыре колеса 15, 16 могут содействовать эффекту торможения. Иначе, осуществляется вход в режим привода на два колеса, который может быть режимом привода на передние колеса в случае транспортного средства 1 на фиг. 1 или любым из режимов привода на передние и задние колеса в случае транспортного средства 1 на фиг. 2.
Следует отметить, что режим, в который осуществлен вход на этапе S83, может не быть чистым режимом привода на передние колеса, а может также быть режимом привода на четыре колеса, в котором часть крутящего момента двигателя, передаваемого к задним колесам, меньше, чем в режиме привода на четыре колеса на этапе S81.
Если пороговое значение Thr этапа S80 установлено равным числу показателей, определенных в первой части способа, т.е., равным 7 в случае способа, показанного на фиг. 3, решение этапа S80 составляет логическое произведение различных показателей. Конечно, пороговое значение может также быть установлено в промежуточное значение i между 1 и итоговым числом=7 показателей, так что этап S80 означает проверку того, равны ли 1, по меньшей мере, i показателей.
Как будет очевидно специалисту, сумма этапа S80 может быть взвешенной суммой, в которой показателю, который сильно коррелируется с тенденцией транспортного средства к избыточной или недостаточной поворачиваемости, присваивается более высокий весовой коэффициент, чем показателю, который коррелируется менее сильно.
Вместо использования только ряда показателей, равняющихся 1, в качестве критериев для двоичного выбора, выбирающего между режимами привода на четыре колеса и привода на два колеса, как показано на фиг. 4, возможно выбирать между различными режимами движения вперед, имеющими различные коэффициенты распределения крутящего момента между передней и задней осями, как показано на фиг. 5. Здесь, этап S90 проверяет скорость транспортного средства и входит в режим привода на четыре колеса, имеющий фиксированный коэффициент распределения, равный, например, 50 на 50 (этап S90), если скорость транспортного средства ниже порогового значения vmin. Иначе, процентное соотношение TR крутящего момента, передаваемого к задним колесам, может быть функцией f(ΣXXin) вероятностно взвешенной суммы показателей. В то время как f(0) может быть нулем или 100% (соответствуя чистому приводу на передние колеса или чистому приводу на задние колеса, соответственно) в случае, когда все показатели равняются нулю, и транспортное средство является совершенно устойчивым, TR будет монотонно увеличиваться с ΣXXin до тех пор, пока оно не достигнет значения, обычно находящегося в диапазоне от 30% до 70%, в котором склонность транспортного средства к избыточной или недостаточной поворачиваемости в значительной степени уменьшается. Хотя не показано, этап проверки торможения двигателем может также быть предусмотрен в процессе на фиг. 5.
Полный процесс на фиг. 3 и 4 или фиг. 3 и 5 повторяется снова и снова, пока транспортное средство 1 движется. Итерация процесса может запускаться с постоянными временными интервалами или посредством любого существенного изменения в любом из параметров движения, которые оцениваются в первой части процесса.
Автомобиль с выпуклой вперед передней стенкой
Автомобиль с поднимающимся капотом
Замок капота автомобиля
Устройство масляной ванны
Узел откидной крышки резервуара
Система подрамника для объединения заданного модуля крыши в кузове автомобиля
Усиливающий элемент для нижней зоны переднего бампера, а также передний бампер для автомобиля, имеющий такой усиливающий элемент
Усиливающий элемент для нижней зоны переднего бампера, а также передний бампер для автомобиля, оснащенный таким усиливающим элементом
Коробка передач, переключаемая под нагрузкой, и способ ее переключения
Способ эксплуатации системы дизельного двигателя и управляющее устройство
Устройство и способ защиты компрессора и охладителя воздуха турбонаддува в двигателе внутреннего сгорания, двигатель внутреннего сгорания и устройство управления
Способ диагностирования каталитического устройства системы дополнительной обработки выхлопных газов двигателя
Способ управления процессом переключения автоматической коробки передач
Система зарядки аккумуляторной батареи для гибридных транспортных средств
Способ и контроллер для управления давлением в системе подачи топлива, а также машиночитаемый носитель
Способ управления устройством сцепления и электронно-управляемое фрикционное сцепление

