Результат интеллектуальной деятельности: СПОСОБ ОБЕСПЕЧЕНИЯ НАВИГАЦИИ АВТОНОМНОГО ПОДВОДНОГО РОБОТА
Вид РИД
Изобретение
Изобретение относится к средствам подводной навигации и может быть использовано для навигационного обеспечения автономных подводных роботов (АПР) с неограниченным и произвольным районом работы.
Известен способ навигационного обеспечения автономного подводного робота, совершающего протяженную миссию с контролем его положения на борту обеспечивающего судна. В этом способе на борту автономного подводного робота устанавливают координаты его стартовой точки, затем счисляют траекторию его движения по данным датчиков скорости, курса и глубины, после чего принимают навигационные сигналы, излучаемые гидроакустическим маяком с известными координатами, затем определяют собственные координаты автономного подводного робота относительно гидроакустического маяка путем измерения дальности до него и его углового положения. Полученные координатные данные комплексно обрабатывают, получают оценку координат автономного подводного робота на его борту и передают ее по гидроакустическому каналу на борт обеспечивающего судна, где отображают траекторию движения автономного подводного робота. Данный способ навигационного обеспечения основан на использовании сети внешних опорных стационарных гидроакустических маяков, излучающих навигационные сигналы при наличии бортовой системы измерения дальности маяков, специальной системы гидроакустической связи между обеспечивающим судном и автономным подводным роботом. Каждый из этих маяков по очереди является опорным в своем районе трассы работ. Положение автономного подводного робота определяется путем измерения дальности и углового положения гидроакустического маяка, координаты которого предварительно установлены на автономном подводном роботе. Рассчитанные на борту автономного подводного робота комплектованные навигационные данные по гидроакустической системе связи передаются на борт обеспечивающего судна, позволяя контролировать его положение в ходе работ в реальном времени. Для коррекции системы счисления применяют только один гидроакустический маяк с известными координатами, а для увеличения оперативности на борту автономного подводного робота дополнительно устанавливают измеритель углового положения гидроакустического маяка (Satoshi Tsukioka, Taro Aoki, Takashi Murashima. Experimental Results of an Autonomous Underwater Vehicle «Urashima» - Oceans-2003, p.940-945).
Недостатком этого способа навигационного обеспечения АПР, контролируемого с борта обеспечивающего судна (ОС), при его реализации в навигационных системах для АПР с большой дальностью действия является необходимость предварительной установки большого числа стационарных опорных гидроакустических маяков вдоль трассы движения АПР и их точного координирования. Указанный недостаток в целом значительно увеличивает время проведения работ и их стоимость.
Известен также способ навигационного обеспечения автономного подводного робота, контролируемого с борта обеспечивающего судна, при котором на борту автономного подводного робота устанавливают координаты его стартовой точки, счисляют траекторию его движения по данным датчиков скорости, курса и глубины, принимают навигационные сигналы, излучаемые опорным гидроакустическим маяком с известными координатами, определяют собственные координаты автономного подводного робота относительно опорного гидроакустического маяка путем измерения его дальности и углового положения, полученные координатные данные комплексно обрабатывают, получают оценку координат автономного подводного робота на его борту, передают ее по гидроакустическому каналу на борт обеспечивающего судна и отображают на борту судна траекторию движения автономного подводного робота, обеспечивающее судно перемещают в соответствии с движением автономного подводного робота вдоль его трассы, опорный гидроакустический маяк выполняют буксируемым, дополнительно на нем устанавливают приемник навигационных сигналов, соединяют кабельной линией связи с обеспечивающим судном и выставляют посредством буксирующего устройства за борт обеспечивающего судна, совмещают его движение с движением обеспечивающего судна, а на борту автономного подводного робота дополнительно устанавливают передатчик навигационных сигналов, при этом координаты стартовой точки автономного подводного робота и текущие координаты опорного гидроакустического маяка определяют средствами судовой навигации и передают по кабельной линии связи на опорный гидроакустический маяк и далее по гидроакустическому каналу на борт автономного подводного робота в составе навигационных сигналов, излучаемых опорным гидроакустическим маяком, а полученные на борту автономного подводного робота данные комплексной обработки информации, содержащие оценку его координат, в составе обратного навигационного сигнала по гидроакустическому каналу передают на опорный гидроакустический маяк, а затем по кабельной линии связи на борт обеспечивающего судна (Патент РФ №2344435. Бюл. №2, 2009).
Недостаток этого способа, являющегося наиболее близким к предлагаемому способу и принятого за прототип, заключается в том, что он не обеспечивает точную навигацию АПР с помощью только одного мобильного гидроакустического маяка (ГМ), так как пеленг от АПР на ГМ, определяемый в прототипе с помощью гидроакустической навигационной системы с ультракороткой базой (ГАНС УКБ), измеряется неточно.
Задачей, на решение которой направлено предлагаемое техническое решение, является повышение точности определения текущего местоположения АПР в пространстве без использования ГАНС УКБ, которая не обеспечивает необходимую точность определения пеленга на ГМ (направление в пространстве от АПР на ГМ) и, соответственно, требуемую точность определения местоположения АПР.
Технический результат, получаемый при решении поставленной задачи, выражается в повышении точности определения текущего местоположения АПР в пространстве за счет того, что обеспечивающее судно маневрирует по водной поверхности относительно траектории движения автономного подводного робота, пересекая ее проекцию на водную поверхность и перемещаясь в конкретную точку водной поверхности, при этом для определения координат этой точки используют информацию о текущих расстояниях между гидроакустическим маяком и автономным подводным роботом, а также оценку ошибки определения местоположения автономного подводного робота, поступающую на борт обеспечивающего судна от автономного подводного робота в составе обратного навигационного сигнала.
Поставленная задача решается тем, что способ обеспечения навигации автономного подводного робота, положение которого контролируется с борта обеспечивающего судна, при котором на борту автономного подводного робота счисляют траекторию его движения по данным датчиков скорости, курса и глубины, принимают навигационные сигналы, излучаемые гидроакустическим маяком с известными координатами, измеряют время распространения акустического сигнала между автономным подводным роботом и обеспечивающим судном, а на его основе и расстояние между автономным подводным роботом и гидроакустическим маяком и используют величину этого расстояния для получения текущих пространственных координат автономного подводного робота, при этом текущие координаты гидроакустического маяка определяют средствами судовой навигации и передают их по гидроакустическому каналу связи на борт автономного подводного робота в составе навигационных сигналов, излучаемых гидроакустическим маяком, а полученные на борту автономного подводного робота данные обработки информации, содержащие оценку его координат, в составе обратного навигационного сигнала по гидроакустическому каналу передают на обеспечивающее судно, отличается тем, что обеспечивающее судно маневрирует по водной поверхности относительно траектории движения автономного подводного робота, пересекая ее проекцию на водную поверхность и перемещаясь в конкретную точку водной поверхности, при этом для определения координат этой точки используют информацию о текущих расстояниях между гидроакустическим маяком и автономным подводным роботом, а также оценку ошибки определения местоположения автономного подводного робота, поступающую на борт обеспечивающего судна от автономного подводного робота в составе обратного навигационного сигнала.
Сопоставительный анализ признаков заявленного решения с признаками прототипа и аналога свидетельствует о соответствии заявленного решения критерию "новизна".
Признаки отличительной части формулы изобретения обеспечивают решение следующих функциональных задач.
Признак «…обеспечивающее судно маневрирует по водной поверхности относительно траектории движения автономного подводного робота, пересекая ее проекцию на водную поверхность и перемещаясь в конкретную точку водной поверхности...» позволяет переместить ГМ в ту точку водной поверхности, из которой очередное измерение расстояния между ГМ и АПР позволит уточнить реальное местоположение АПР в пространстве, уменьшая область погрешности исчисления пространственного положения АПР, которое осуществляется на борту АПР с использованием информации, поступающей от его датчиков скорости, курса и глубины.
Признак, указывающий на то, что «для определения координат точки», в которую должно переместиться обеспечивающее судно, «используют информацию о текущих расстояниях между гидроакустическим маяком и автономным подводным роботом, а также оценку ошибки определения местоположения автономного подводного робота, поступающую на борт обеспечивающего судна от автономного подводного робота в составе обратного навигационного сигнала», обеспечивает реализуемость способа, поскольку несложно определить это расстояние на основе измерения времени распространения акустического сигнала между АПР и ГМ и передать сообщение об исчисленном очередном местоположении ОС с борта АПР на это ОС по типовому гидроакустическому каналу связи. В вертикальной плоскости положение АПР, измеряемое датчиком глубины, определяется достаточно точно.
Заявленное изобретение иллюстрируется фиг.1, где показана схема, реализующая заявленный способ навигации АПР.
На чертеже показаны: проекция 1 текущего положение АПР на горизонтальную плоскость, расположенную на водной поверхности; текущее положение 2 ОС с ГМ в указанной плоскости; проекция 3 на эту плоскость линии, определяющей расстояние между АПР и ГМ; эллипсообразная проекция 4 на указанную плоскость области вероятного нахождения АПР, построенной с учетом погрешностей счисления его положения, которое осуществляется на борту АПР; эллипсообразная проекция 5 на эту же плоскость области уточненного вероятного нахождения АПР, скорректированной на основе измерения расстояния между АПР и ГМ; проекция 6 на указанную горизонтальную плоскость большой оси эллипсообразной проекции 4, перпендикулярная проекции 3; точка 7 желаемого нахождения ОС с ГМ во время следующего определении расстояния между АПР и ГМ; проекция 8 на указанную горизонтальную плоскость следующего реального положения АПР в момент очередного измерения расстояния между АПР и ГМ; эллипсообразная проекция 9 на эту же плоскость области текущего вероятного нахождения АПР с учетом новых добавившихся погрешностей счисления его очередного положения; проекция 10 на указанную горизонтальную плоскость линии, определяющей расстояние между очередным положением АПР и ГМ, находящимся вместе с ОС в точке 7; эллипсоидальная проекция 11 на рассматриваемую горизонтальную плоскость области очередного уточненного вероятного нахождения АПР, скорректированной на основе очередных измерений расстояний между АПР и ГМ; проекция 12 на рассматриваемую горизонтальную плоскость большой оси элипсообразной проекции 9; проекция 13 на эту горизонтальную плоскость большой оси элипсообразной проекции 11, перпендикулярная проекции 10; реальная траектория 14 движения АПР.
Все устройства, устанавливаемые на бортах АПР и ОС, известны.
Заявленный способ реализуется следующим образом.
После начала движения АПР из исходной точки его бортовой компьютер с погрешностью, определяемой характеристиками используемых датчиков и внешними факторами, воздействующими на этот АПР, начинает счислять траекторию его движения, определяя текущее положение АПР в пространстве. С учетом указанных погрешностей реальное положение 1 АПР в пространстве (см. фиг.1) в текущий момент времени будет располагаться внутри некоторого эллипсоида, проекция которого на фиг.1 обозначена цифрой 4. В текущий момент определения расстояния между АПР и ГМ обеспечивающее судно располагается в позиции 2. Поскольку это расстояние определяется с малой погрешностью, то область 5 уточненного вероятного нахождения АПР, скорректированная на основе измерения дальностей, существенно уменьшается по сравнению с проекцией 4, и текущее пространственное положение АПР уточняется. Положение точки 7 на оси 6 определяется таким образом, чтобы очередное измерение расстояния между АПР и ГМ имело минимальную погрешность. При этом для обеспечения большей точности определения очередного положения АПР точка 7 должна находиться по другую сторону относительно траектории 14 от точки 2. Промежуток времени между очередными измерениями расстояния между АПР и ГМ должно быть таким, чтобы ОСуспело переместиться из точки 2 в точку 7. При этом указанное время должно быть малым, чтобы расстояние между точками 1 и 8 тоже было малым, а направление оси 12 мало отличалось от направления оси 6. Это возможно в случаях, когда скорость ОС существенно выше скорости АПР.
Очевидно, что по прошествии указанного короткого времени площадь эллипсообразной проекции 9 за счет накопления новых ошибок исчисления положения АПР увеличивается незначительно по сравнению с площадью проекции 5. Поэтому при очередном измерении расстояния между АПР и ГМ ОС по линии, проекция которой на горизонтальную плоскость определяется линией 10, происходит еще большее уточнение текущего положения АПР в пространстве, которое начинает определяться уже эллипсообразной проекцией 11 на рассматриваемой горизонтальной плоскости, большая ось 13 которой перпендикулярна проекции 10. Очевидно, что площадь проекции 11 много меньше площади проекций 9 и 5.
Указанная последовательность описанных действий непрерывно продолжается и повторяется в процессе перемещения АПР по некоторой пространственной траектории 14. При этом происходит непрерывное уточнение текущего положения АПР в пространстве, несмотря на непрерывно накапливающуюся погрешность исчисления его положения, производимого на его бортовой ЭМВ.
Способ обеспечения навигации автономного подводного робота, положение которого контролируется с борта обеспечивающего судна, при котором на борту автономного подводного робота счисляют траекторию его движения по данным датчиков скорости, курса и глубины, принимают навигационные сигналы, излучаемые гидроакустическим маяком с известными координатами, измеряют время распространения акустического сигнала между автономным подводным роботом и обеспечивающим судном, а на его основе и расстояние между автономным подводным роботом и гидроакустическим маяком и используют величину этого расстояния для получения текущих пространственных координат автономного подводного робота, при этом текущие координаты гидроакустического маяка определяют средствами судовой навигации и передают их по гидроакустическому каналу связи на борт автономного подводного робота в составе навигационных сигналов, излучаемых гидроакустическим маяком, а полученные на борту автономного подводного робота данные обработки информации, содержащие оценку его координат, в составе обратного навигационного сигнала по гидроакустическому каналу передают на обеспечивающее судно, отличающийся тем, что обеспечивающее судно маневрирует по водной поверхности относительно траектории движения автономного подводного робота, пересекая ее проекцию на водную поверхность и перемещаясь в конкретную точку водной поверхности, при этом для определения координат этой точки используют информацию о текущих расстояниях между гидроакустическим маяком и автономным подводным роботом, а также оценку ошибки определения местоположения автономного подводного робота, поступающую на борт обеспечивающего судна от автономного подводного робота в составе обратного навигационного сигнала.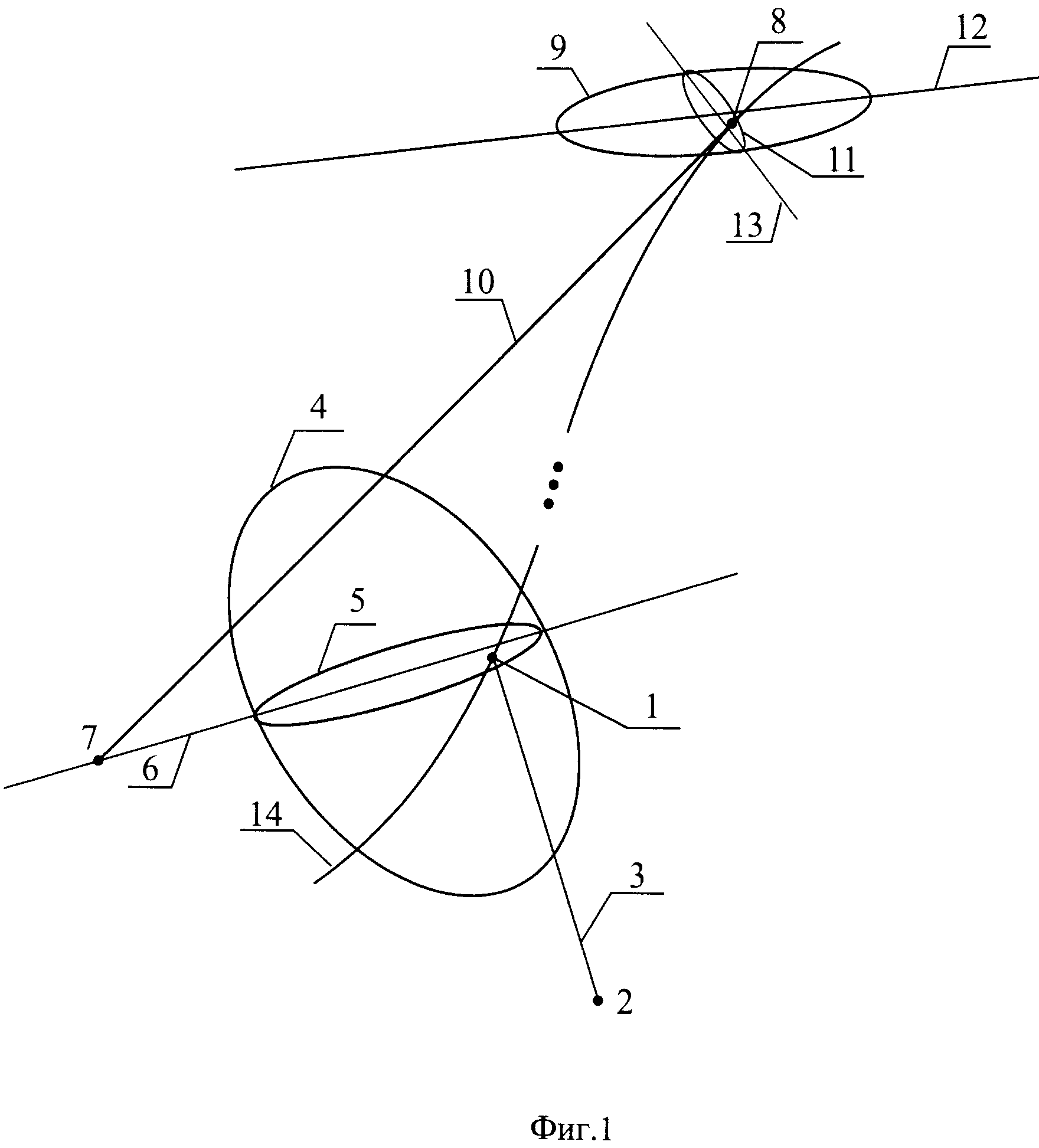
Сухая смесь для приготовления напитка
Соевый соус
Сухая смесь для приготовления спортивного напитка
Электромашина
Радиальный магнитный подшипниковый узел
Способ получения антифрикционной композиции
Способ производства йогурта
Ротор электромашины
Способ струйной обработки материалов
Ротор электромашины
Способ культивирования опухолевых стволовых клеток глиобластомы
Способ получения октагалактуронида
Ротор электромашины
Торцевое разъемное соединение оболочек прочного корпуса подводного аппарата
Опорный подшипниковый узел
Способ подводного массажа
Способ производства йогурта
Самонастраивающийся электропривод манипулятора
Способ работы системы теплоснабжения
Котел водогрейный прямоугольного поперечного сечения

