Результат интеллектуальной деятельности: СПОСОБ ЗАЩИТЫ ОТ АВАРИИ МНОГОКАНАЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ
Вид РИД
Изобретение
Изобретение относится к ракетно-космической технике и может быть использовано в автоматах стабилизации ракет, управление угловым движением которых осуществляется путем поворота нескольких камер сгорания двигателей с помощью рулевых приводов.
Наиболее близким по технической сущности к предлагаемому изобретению является выбранный в качестве прототипа способ защиты от аварии многоканальных систем управления ракет [1]. Этот способ включает формирование в каждом канале, соответствующем определенной камере сгорания, информативного сигнала в виде разности командного сигнала и сигнала обратной связи, сравнение значения длительности этого информативного сигнала с допустимым значением, большим времени перемещения камеры сгорания с максимальной угловой скоростью, обеспечиваемой рулевым приводом этого канала, из крайнего положения в среднее и меньшим времени выхода ракеты на предельные углы отклонения по тангажу, рысканию и крену, формирование сигнала отключения соответствующего канала системы управления при превышении длительности информативного сигнала допустимого значения в виде сигнала установки штока рулевого привода этого же канала в среднее положение, при этом командные сигналы остальных каналов формируют с амплитудой, превышающей ее номинальное значение.
Одним из недостатков данного способа защиты от аварии многоканальных систем управления ракет является недостаточная надежность в идентификации отказавшего канала системы управления. Это связано с тем, что в соответствии с известным способом при определении факта отказа канала учитывается только длительность информативного сигнала, которая сравнивается с допустимым значением длительности. Это может привести, с одной стороны, к ложному срабатыванию системы управления - отключению исправного канала (в случае, например, наличия достаточно длительного участка нарастания командного сигнала при прохождении слоя атмосферы со сдвигом ветра, когда сигнал обратной связи отстает от командного сигнала на очень небольшой угол, обусловленный динамикой рулевого привода). С другой стороны, при быстром развитии аварийной ситуации, когда командный сигнал и сигнал обратной связи интенсивно нарастают по абсолютной величине, но имеют разные знаки, решение об отключении неисправного канала, принятое на основании только длительности информативного сигнала, может оказаться запоздавшим, при этом ракета потеряет управляемость.
Другим недостатком известного способа защиты от аварии многоканальных систем управления ракет является то, что при применении этого способа не полностью реализуются возможности системы управления по парированию влияния отказавшего канала на динамику движения ракеты. Известный способ предусматривает при обнаружении отказа одного из каналов увеличение амплитуды командных сигналов остальных каналов, что достигается увеличением коэффициентов усиления остальных каналов. Однако в известном способе управляющие сигналы по тангажу, рысканию и крену не перераспределяются оптимальным образом между исправными каналами, что не позволяет при использовании известного способа реализовать желаемые управляющие сигналы по тангажу, рысканию и крену. Кроме того, при отказе рулевого привода одного из каналов, но сохранении тяги двигателя этого канала, возможно неуправляемое угловое движение камеры этого двигателя, создающее значительные возмущающие моменты по тангажу, рысканию и (или) крену. При этом может оказаться невозможной установка штока рулевого привода отказавшего канала в среднее положение. В известном способе в выработке командных сигналов исправных каналов не используется сигнал обратной связи отказавшего канала, камера двигателя которого совершает неуправляемое движение, что также не дает возможности при использовании известного способа реализовать желаемые управляющие сигналы по тангажу, рысканию и крену. В то же время, как будет показано ниже, при наличии четырех или более каналов системы управления, в случае отказа одного из каналов, в линейной зоне возможна практически точная реализация желаемых управляющих сигналов по тангажу, рысканию и крену даже при неуправляемом угловом движении камеры двигателя отказавшего канала. Наконец, предусмотренное способом-прототипом увеличение коэффициентов усиления остальных (неотказавших) каналов может быть нежелательным с точки зрения обеспечения устойчивости углового движения ракеты с учетом колебаний компонентов жидкого топлива в баках и упругих колебаний конструкции.
Задачей предложенного изобретения является разработка способа защиты от аварии многоканальных систем управления ракет, повышающего надежность идентификации в полете отказа канала системы управления, а также качество управления угловым движением ракеты с помощью остальных (исправных) каналов системы управления.
Техническим результатом предлагаемого изобретения является повышение вероятности успешного продолжения полета при отказе рулевого привода одного из каналов системы управления.
Указанный технический результат достигается тем, что в способе защиты от аварии многоканальных систем управления ракет, включающем формирование в каждом канале, соответствующем определенной камере сгорания, информативного сигнала в виде разности командного сигнала и сигнала обратной связи, формирование сигнала отключения соответствующего канала системы управления в виде сигнала установки штока рулевого привода этого же канала в среднее положение, в соответствии с изобретением сигнал отключения канала формируют в случае превышения вычисленным на временном промежутке определенной длительности интегралом от модуля информативного сигнала заранее выбранного порогового значения, при этом командные сигналы остальных каналов формируют в виде сумм или разностей управляющих сигналов по тангажу, рысканию и крену и сигнала обратной связи отключенного канала с коэффициентами, зависящими от номера отключенного канала, таким образом, чтобы обеспечить создание требуемых суммарных управляющих моментов по тангажу, рысканию и крену.
Сущность предлагаемого изобретения иллюстрируется фиг.1-4.
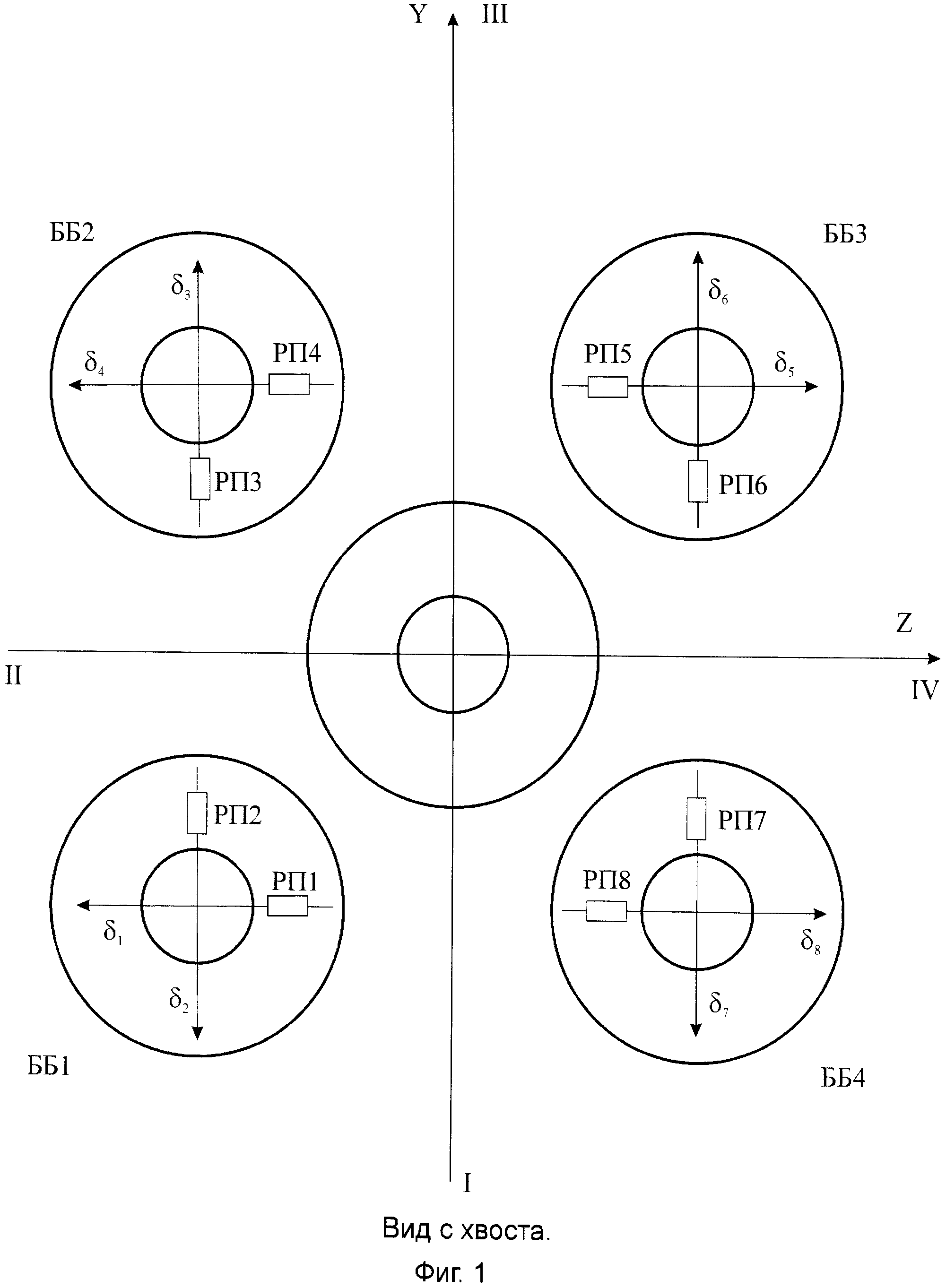
Фиг.1 - Схема расположения сопел двигателя и рулевых приводов для примера 1.
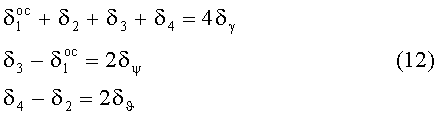
Фиг.2 - Результаты математического моделирования отказа рулевого привода для примера 1.
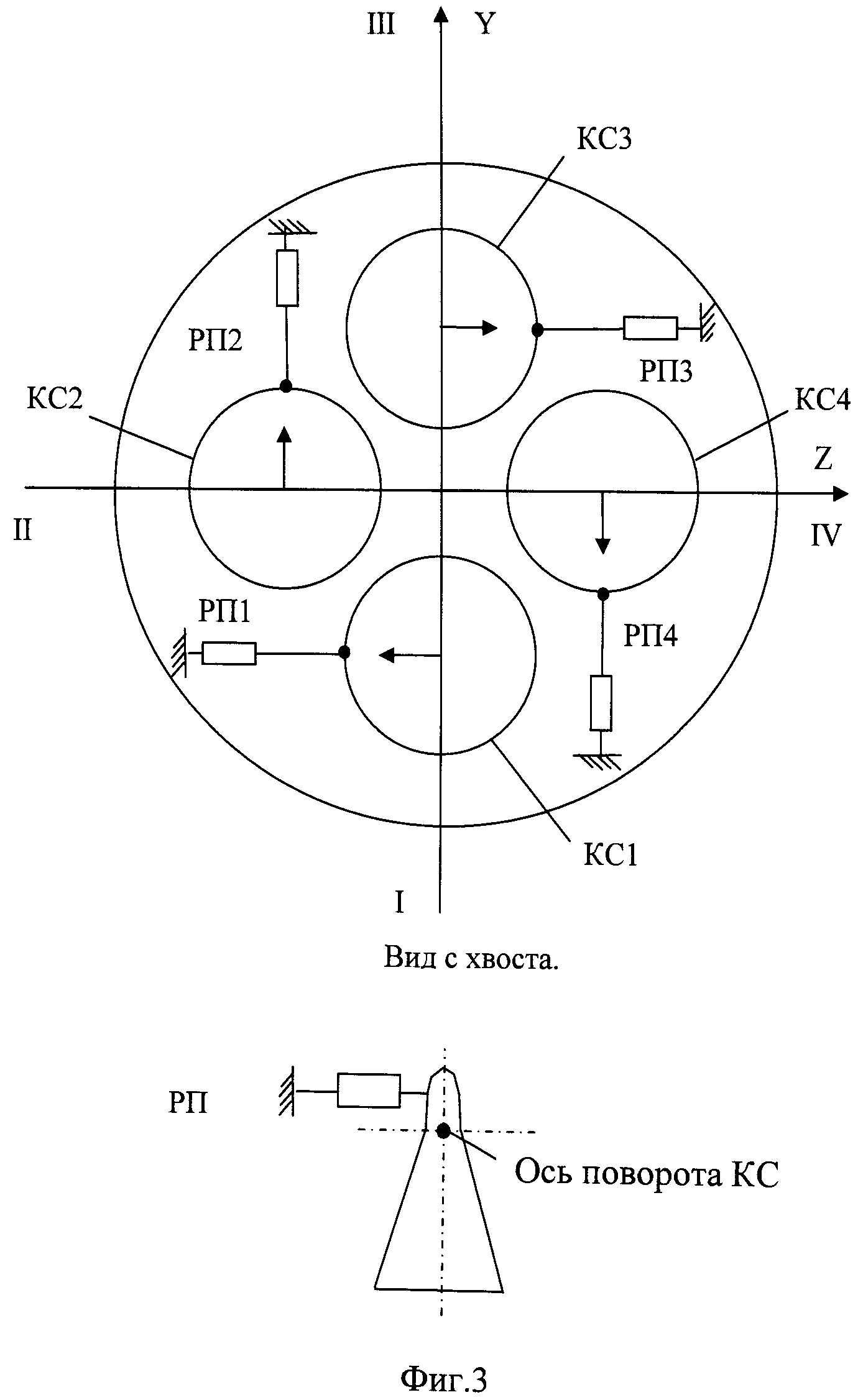
Фиг.3 - Схема расположения сопел двигателя и рулевых приводов для примера 2.
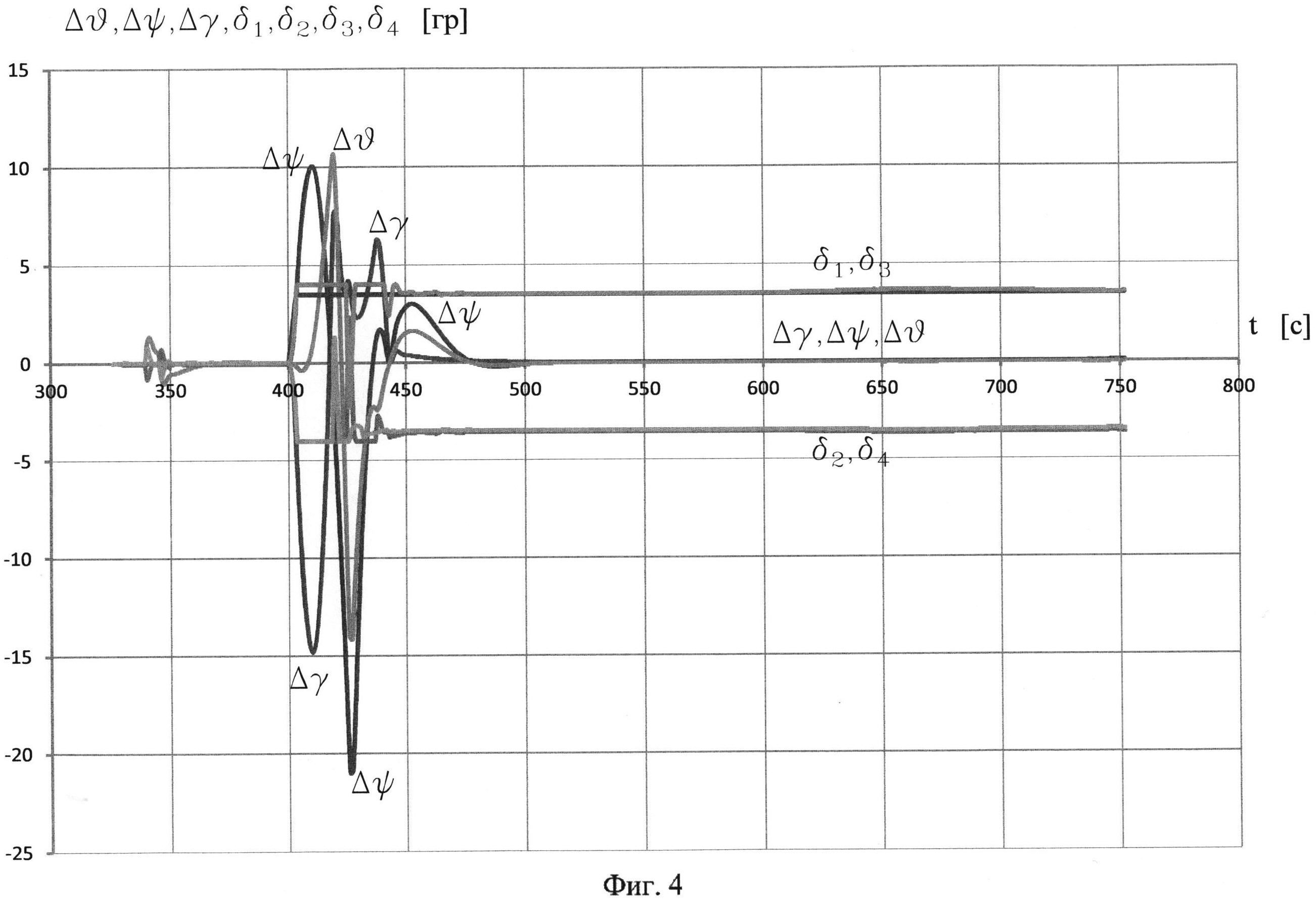
Фиг.4 - Результаты математического моделирования отказа рулевого привода для примера 2.
Рассмотрим два примера реализации предлагаемого способа защиты от аварии многоканальных систем управления ракет.
Пример 1
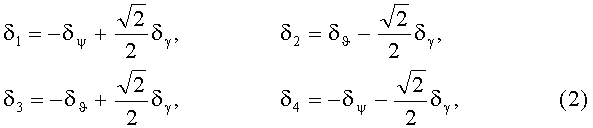
Система управления создаваемой в ГКНПЦ им. М.В.Хруничева ракеты космического назначения (РКН) «Ангара-А5» на участке работы двигателей I ступени может рассматриваться как 8-канальная. Ракета состоит из 4-х боковых блоков (ББ), являющихся 1-ой ступенью, и центрального блока, включающего II и III ступени, а также космическую головную часть. Камера сгорания (КС) каждого из 4 двигателей ББ, установленных в карданных подвесах, может отклоняться в двух взаимно перпендикулярных направлениях с помощью двух рулевых приводов (РП), при этом продольная ось камеры каждого двигателя может занимать любое положение внутри конуса, вершиной которого является центр качания камеры, а угол между образующей конуса и его осью равен максимально возможному углу отклонения камеры (≈8°). Схема расположения сопел двигателей и рулевых приводов показана на фиг.1. Стрелками показаны направления положительных отклонений δ1, …, δ8 (положительным считается отклонение камеры при выдвижении штока соответствующего РП). Система управления движением ракеты периодически (с тактом БЦВМ, равным 0,032768 с) вырабатывает управляющие сигналы по тангажу δϑ, рысканию δψ и крену δγ:

где Δϑ, Δψ, Δγ - рассогласования по углам тангажа, рыскания и крена соответственно.
Сигналы δϑ, δψ, δγ можно рассматривать как желаемые углы отклонения некоторых «обобщенных» органов управления. При безотказной работе рулевых приводов для реализации управляющего сигнала δϑ используются РП 2, 3, 6 и 7, перемещения штоков которых создают момент тангажа. Аналогично, для реализации управляющего сигнала рыскания 8 используются РП 1, 4, 5 и 8. Управляющий сигнал по крену 5 отрабатывается всеми 8 рулевыми приводами, при этом для минимизации углов отклонения камер плечи управляющих сил выбираются максимальными. В результате законы формирования командных сигналов для 8 каналов системы управления при безотказной работе всех каналов имеют вид:
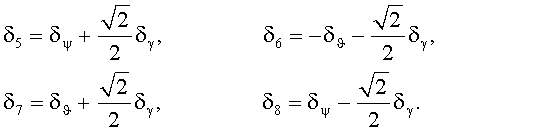
При этом управляющие моменты, создаваемые двигателями, равны (в предположении малости углов):
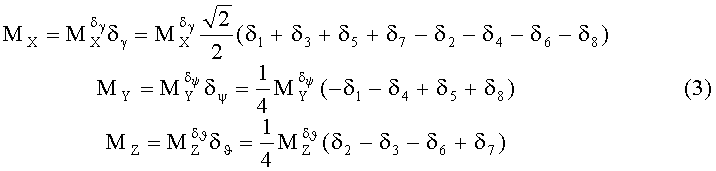
В соответствии с предлагаемым способом защиты в каждом из 8 каналов с тактом работы БЦВМ формируется информативный сигнал  , где δi - командный сигнал, а
, где δi - командный сигнал, а  - сигнал обратной связи i-го канала (i=1,…,8). На заданном интервале времени (для рассматриваемой РКН на участке работы двигателя I ступени длительность этого интервала выбрана равной Δt=1с) вычисляется интеграл
- сигнал обратной связи i-го канала (i=1,…,8). На заданном интервале времени (для рассматриваемой РКН на участке работы двигателя I ступени длительность этого интервала выбрана равной Δt=1с) вычисляется интеграл

где t - текущий момент времени. Интеграл (4) сравнивается с пороговым значением σ0 (для рассматриваемого примера σ0 выбрано равным 3 гр·с). В случае превышения интегралом от модуля информативного сигнала σi(t) порогового значения σ0 в соответствии с изобретением формируется сигнал отключения i-го канала. Этот сигнал отключения формируется в виде нулевого командного сигнала на рулевой привод i-го канала, что соответствует приведению штока РП в среднее положение. В зависимости от вида отказа рулевого привода (заклинивание золотника гидроусилителя, отказ электромеханического преобразователя на входе гидроусилителя, обрыв электрической обратной связи и др.) РП либо отработает подаваемый на него нулевой командный сигнал (при этом камера двигателя займет неотклоненное положение), либо шток рулевого привода и жестко связанная с ним камера двигателя будут совершать неуправляемое движение. Предположим, для определенности, что отказал РП 1-го канала, при этом известен сигнал обратной связи этого канала  . Для создания желаемых управляющих моментов (3) требуется выполнение условий
. Для создания желаемых управляющих моментов (3) требуется выполнение условий
Отказ РП 1-го канала не влияет на реализацию управляющего сигнала по тангажу, поэтому в каналах 2, 3, 6 и 7 можно сохранить законы управления (2):
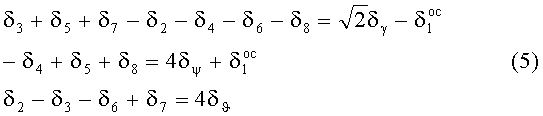
В этом случае из системы уравнений (5) получим:


При дополнительном требовании минимизации суммы  будем иметь:
будем иметь:

Соотношения (6), (7), (9) являются законами формирования командных сигналов для остальных (неотключенных) каналов системы управления. Они представляют собой суммы или разности управляющих сигналов по тангажу, рысканию и крену и сигнала обратной связи отключенного канала, в данном случае канала номер 1. Аналогичные соотношения можно получить для любого другого номера отказавшего канала. При этом, как уже указывалось, числовые коэффициенты при управляющих сигналах δϑ, δψ, и δγ, а также при сигнале обратной связи отключенного канала, зависят от номера отключенного канала.
На фиг.2 представлены результаты математического моделирования движения рассматриваемой РКН при возникновении отказа рулевого привода канала 1 на 80 с полета (время от момента окончания точного приведения). Отказ заключается в самопроизвольном перемещении штока РП в крайнее положение (при этом соответствующая камера отклоняется на предельный угол δ1=8°). Из фиг.2 видно, что после переходного процесса рассогласования по углам тангажа, рыскания и крена устанавливаются близкими к 0. На фиг.2 показан также угол отклонения камеры в наиболее нагруженном канале 8 - он составляет после отказа около 7° и не выходит на ограничение.
Пример 2
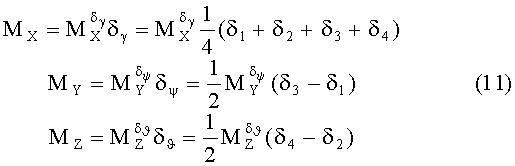
Система управления РКН «Ангара-А5» на участке работы двигателя III ступени может рассматриваться как 4-канальная. Ракета имеет 4-х камерный двигатель, каждая КС которого отклоняется в тангенциальном направлении с помощью своего РП. Диапазон углов отклонения каждой камеры - от -4° до 4°. На фиг.3 стрелками показаны направления положительных отклонений камер δ1, …, δ4 (положительным считается отклонение КС при выдвижении штока соответствующего рулевого привода). Система управления движением ракеты периодически (с тактом БЦВМ, равным 0,032768 с) вырабатывает управляющие сигналы по тангажу δϑ, рысканию 6ψ и крену δγ в соответствии с законами управления (1). При безотказной работе рулевых приводов для реализации управляющего сигнала δϑ используются КС 2 и 4, отклонение которых создает момент тангажа. Аналогично, для реализации управляющего сигнала рыскания δψ используются КС 1 и 3. Управляющий сигнал по крену δγ отрабатывается всеми 4 камерами. В результате законы формирования командных сигналов для 4 каналов системы управления при безотказной работе всех каналов имеют вид:
При этом управляющие моменты, создаваемые всеми КС двигателя, равны (в предположении малости углов):
В соответствии с предлагаемым способом защиты для каждого из 4 каналов с тактом работы БЦВМ формируется информативный сигнал  , где δi - командный сигнал, а
, где δi - командный сигнал, а  - сигнал обратной связи i-го канала (i=1, …, 4). На заданном интервале времени (для рассматриваемой РКН на участке работы двигателя III ступени длительность этого интервала выбрана равной Δt=1 с) вычисляется интеграл (4), который сравнивается с пороговым значением σ0 (для рассматриваемого примера σ0 выбрано равным 2 гр·с). В случае превышения интегралом σi(t) значения σ0 в соответствии с изобретением формируется сигнал отключения i-го канала. Этот сигнал отключения формируется в виде нулевого командного сигнала на РП i-го канала, что соответствует приведению штока рулевого привода в среднее положение. В зависимости от вида отказа РП либо отработает подаваемый на него нулевой командный сигнал (при этом КС займет неотклоненное положение), либо шток РП и связанная с ним КС сгорания будут совершать неуправляемое движение. Предположим, для определенности, что отказал рулевой привод i-го канала, при этом известен сигнал обратной связи этого канала
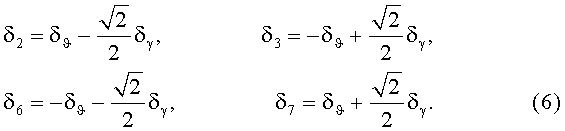
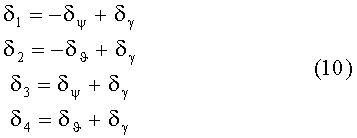
- сигнал обратной связи i-го канала (i=1, …, 4). На заданном интервале времени (для рассматриваемой РКН на участке работы двигателя III ступени длительность этого интервала выбрана равной Δt=1 с) вычисляется интеграл (4), который сравнивается с пороговым значением σ0 (для рассматриваемого примера σ0 выбрано равным 2 гр·с). В случае превышения интегралом σi(t) значения σ0 в соответствии с изобретением формируется сигнал отключения i-го канала. Этот сигнал отключения формируется в виде нулевого командного сигнала на РП i-го канала, что соответствует приведению штока рулевого привода в среднее положение. В зависимости от вида отказа РП либо отработает подаваемый на него нулевой командный сигнал (при этом КС займет неотклоненное положение), либо шток РП и связанная с ним КС сгорания будут совершать неуправляемое движение. Предположим, для определенности, что отказал рулевой привод i-го канала, при этом известен сигнал обратной связи этого канала  . Для создания желаемых управляющих моментов (11) требуется выполнение условий
. Для создания желаемых управляющих моментов (11) требуется выполнение условий
откуда
Соотношения (13) являются законами формирования командных сигналов для остальных (неотключенных) каналов системы управления. Они представляют собой суммы или разности управляющих сигналов по тангажу, рысканию и крену и сигнала обратной связи отключенного канала, в данном случае канала номер 1. Аналогичные соотношения можно получить для любого другого номера отказавшего канала. При этом числовые коэффициенты при управляющих сигналах δϑ, δψ и δγ, а также при сигнале обратной связи отключенного канала, зависят от номера отключенного канала.
На фиг.4 представлены результаты математического моделирования движения рассматриваемой РКН при возникновении отказа рулевого привода канала 1 на 400 с полета (время от команды «Контакт подъема). Отказ заключается в самопроизвольном движении штока РП этого канала, приведшего к повороту КС с угловой скоростью 1 гр/с и выходу ее на угол отклонения, равный 3,5°. После этого камера остается в достигнутом ею положении и не реагирует на командный сигнал. При использовании предлагаемого способа управляющие сигналы по тангажу, рысканию и крену перераспределяются так, что оставшиеся каналы системы управления парируют моментные возмущения, создаваемые КС отказавшего канала, даже несмотря на то, что не удается установить шток РП этого канала в среднее положение. РКП при этом продолжает полет по заданной траектории.
Следует отметить, что предлагаемый способ защиты от аварии сохраняет после отказа РП неизменными коэффициенты усиления законов управления (1), выбранные разработчиком системы управления для штатного полета из условия обеспечения устойчивости движения РКП с учетом колебаний жидкости в баках и упругих колебаний конструкции.
Таким образом, благодаря реализации предложенного в изобретении технического решения решается задача разработки способа защиты от аварии многоканальных систем управления ракет, повышающего надежность идентификации в полете отказа канала системы управления, а также качество управления угловым движением ракеты с помощью остальных (исправных) каналов системы управления, и достигается технический результат - повышение вероятности успешного продолжения полета при отказе рулевого привода одного из каналов системы управления.
Источник информации
1. Полухин Д.А., Цуриков Ю.А., Владимиров А.В. Способ защиты от аварии многоканальных систем управления ракет. Патент на изобретение № RU 2058918 С1, кл. B64G 1/24 от 14.11.1983 г.
Способ защиты от аварии многоканальных систем управления ракет, включающий формирование в каждом канале, соответствующем определенной камере сгорания, информативного сигнала в виде разности командного сигнала и сигнала обратной связи, формирование сигнала отключения соответствующего канала системы управления в виде сигнала установки штока рулевого привода этого же канала в среднее положение, отличающийся тем, что сигнал отключения канала формируют в случае превышения вычисленным на временном промежутке определенной длительности интегралом от модуля информативного сигнала заранее выбранного порогового значения, при этом командные сигналы остальных каналов формируют в виде сумм или разностей управляющих сигналов по тангажу, рысканию и крену и сигнала обратной связи отключенного канала с коэффициентами, зависящими от номера отключенного канала, таким образом, чтобы обеспечить создание требуемых суммарных управляющих моментов по тангажу, рысканию и крену.
Вакуумный стенд для огневых испытаний жидкостного ракетного двигателя космического назначения
Турбонасосный агрегат
Входной патрубок газовой турбины
Способ управления угловым движением ракеты космического назначения
Способ сварки трением с перемешиванием и устройство для его осуществления
Центробежная турбина
Жидкостный ракетный двигатель малой тяги
Лабиринтное уплотнение-демпфер газовой турбины
Способ дросселирования тяги жидкостного ракетного двигателя
Жидкостная ракетная двигательная установка космического аппарата
Вакуумный стенд для огневых испытаний жидкостного ракетного двигателя космического назначения
Турбонасосный агрегат
Входной патрубок газовой турбины
Способ управления угловым движением ракеты космического назначения
Способ сварки трением с перемешиванием и устройство для его осуществления
Центробежная турбина
Жидкостный ракетный двигатель малой тяги
Топливный бак
Способ защиты стартовых сооружений от газодинамического воздействия струй двигателей ракеты
Следящая система автоматического управления нестационарным динамическим объектом

