Результат интеллектуальной деятельности: СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ
Вид РИД
Изобретение
Изобретение относится к гидрографии, в частности к способам и техническим средствам барометрической съемки рельефа дна путем определения глубин на заданной акватории с определением их геодезических координат.
Известен способ съемки рельефа дна акватории эхолотом (Коломийчук Н.Д. Гидрография. Л., ГУНиО МО СССР, 1988, с.240-277 [1]), включающий прохождение судном с установленным на нем эхолотом заданными галсами на акватории, излучение гидроакустических сигналов в сторону дна, прием отраженных от дна сигналов, измерение расстояний от приемоизлучающей антенны эхолота до отражающей поверхности (точек дна), определение географических координат судна, определение геодезических координат приемоизлучающей антенны эхолота, измерение параметров бортовой, килевой и вертикальной качки, истинного курса и скорости судна, определение истинных значений глубин и их геодезических координат с последующей их регистрацией и индикацией.
Известно также устройство для осуществления данного способа, представляющее собой эхолот (Hare R. Depth and position error budgets for multibeam echosounding // International Hydrographic Review. 1995, v.LXXII, №2, p.37-69 [2]), содержащий приемоизлучающую антенну, передающий блок, приемоизмерительный блок, блок управления, блок регистрации, обработки картирования рельефа дна, в котором выход приемоизлучающей антенны подключен к входу приемоизмерительного блока, выход передающего блока соединен с приемоизлучающей антенной, выходы приемоизлучающего блока подключены к входу блока регистрации, обработки и картирования рельефа дна, входы которого соединены с выходами судовых измерителей составляющих качки, курса, скорости и координат, а блок управления соединен с передающим блоком, приемоизмерительным блоком и блоком сбора информации, обработки и картирования рельефа дна.
Существенными недостатками известного способа и устройства являются сравнительно невысокая точность съемки рельефа дна акватории, которая не удовлетворяет предъявляемым требованиям к гидрографической съемки, а также существенная трудоемкость выполнения способа, что обусловлено необходимостью выполнения вычислений, связанных с определением поправок за отклонение действительной средней скорости звука в воде от используемых в вычислениях расчетных значений средней скорости звука в воде для конкретного эхолота, определяемой косвенным путем по измеренным значениям температуры, солености и плотности морской воды на принятых в практике стандартных горизонтах по глубине или путем непосредственного измерения скорости звука в равномерно распределенных точках по всей площади акватории.
Ввиду того что требуемая достоверность определения средней скорости звука, выполняемая расчетным путем, обеспечивается только в малой локальной пространственной области, в которой измеряется температура, соленость и плотность морской воды или непосредственно скорость распространения звука в воде для конкретного эхолота, то точность съемки рельефа дна в конечном итоге отягощается погрешностью, обусловленной влиянием мелкомасштабной и крупномасштабной изменчивости во времени ветрового перемещения и турбулентности внутренних волн, подводных течений. Эта погрешность может достигать 3% от измеряемой глубины (см., например: D.E. Dinn, B.D. Loncarevic et al. The effect of so und velocity errors on multibeam sonar depth accuracy // Proceedings of American Hydrograhic Symposium. 1995, p.1001-1009). В соответствии с требованиями стандарта Международной гидрографической организации (см., например: Записки по гидрографии. СПб., ГУНиО МО РФ, №248,1999, с.27-32) на акваториях с глубинами свыше 200 м, на которых выполняется съемка в интересах безопасности судоходства, средняя квадратическая погрешность (СКП) определения глубины не должна превышать 0,3%.
При использовании известного способа съемки рельефа и устройства для его осуществления СКП определения глубины составляет для глубин до 100 м от 0,7 до 3,5 м, а для глубин до 200 м от 2,3 до 11,0 м соответственно, что не удовлетворяет предъявляемым требованиям.
При картировании рельефа дна СКП построения рельефа дна не должна превышать 0,5 мм в масштабе планшета, что в сочетании с погрешностью определения глубины известным способом и устройством для его осуществления в большинстве случаев не позволяет обеспечить и это требование.
Кроме того, при производстве съемки рельефа дна с последующим картированием рельефа дна, особенно в прибрежной зоне моря и в узкостях, необходимо иметь картографическую информацию как по суше, так и по прилегающей к ней акватории. Использование для этих целей типографских топографических и навигационных карт достаточно затруднительно. Одной из причин этого являются разные картографические проекции. Топографические карты строятся в проекции Гаусса-Крюгера, а навигационные в проекции Меркатора. Эта же причина является основным препятствием для использования растровых образов типографских карт в электронных геоинформационных системах, каковыми являются средства отображения картированной информации при выполнении съемки рельефа дна.
Известен также способ съемки рельефа дна акватории и устройство для его осуществления (патент RU №2340916 [3]), в котором технический результат, заключающийся в повышении точности, решается за счет того, что в способе съемки рельефа дна акватории эхолотом, установленным на судне, включающем излучение гидроакустических сигналов в направлении дна, прием отраженных от поверхности дна сигналов, измерение расстояний от приемоизлучающей антенны до дна, определение координат судна по внешним источникам информации, измерение бортовой, килевой и вертикальной качки, истинного курса и скорости судна, привязку результатов измерений по времени, определение истинных значений глубин с определением поправки за отклонение действительной скорости звука в воде от расчетной, картирование полученной информации с определением геодезических координат измеренных глубин, в котором при определении истинных глубин поправку за отклонение действительной скорости звука в воде от расчетной определяют с учетом доплеровского сдвига частоты между излученным и отраженным гидроакустическими сигналами гидроакустического лага от морского дна, при картировании рельефа дна выполняют сопряжение топографических и навигационных растровых карт.
Данный способ благодаря тому, что при определении истинных глубин поправку за отклонение действительной скорости звука в воде от расчетной определяют с учетом средней скорости распространения звука в воде через значения доплеровского сдвига частоты между излученным и отраженным гидроакустическими сигналами гидроакустического лага от морского дна, позволяет достичь технического результата, заключающегося в повышении точности съемки рельефа дна акватории. Однако ввиду того что съемку осуществляют посредством измерительной аппаратуры, установленной на надводном судне, подверженном влиянию внешних условий, во время съемки присутствуют так называемые сбойные данные, которые при окончательной обработке измеренной информации бракуются. Наличие сбойных данных увеличивает время съемки, а соответственно и трудоемкость обработки.
Предусмотренный в аналогах ввод поправок в зависимости от текущих значений рыскания, крена и дифферента носителя измерительной аппаратуры также в неполной мере устраняет погрешности измерения глубин акватории как из-за большой инерционности датчиков, так и из-за неравномерной потери энергии не только на пути от вибратора до дна и на самом дне (благодаря неполному отражению), но и на обратном пути.
Еще более сложные условия возникают при излучении отраженных сигналов от какого-либо препятствия, находящегося в водной среде. Здесь приходится считаться с влиянием телесных углов, внутри которых распространяется поток энергии акустических волн: телесного угла, внутри которого вибратор посылает сигналы, и телесного угла, под которым площадь препятствия видна из центра датчика волн (см., например: Шулейкин В.В. Краткий курс физики моря. Л., Гидрометеоиздат, 1959, с.400-401). И если выполнение съемки известным способом обеспечивает необходимые требования для обеспечения судоходства, то при выполнении съемки в интересах поиска под слоем донного ила объектов и трубопроводов или определения параметров границ континентального шельфа требования по точности съемки не обеспечиваются. Гидроакустический поиск в таких условиях сопровождается большим количеством ложных тревог.
При выполнении съемки на акватории континентального шельфа для выполнения требований по точности необходимо исключить или уменьшить влияние погрешностей, которые носят систематический или медленно меняющийся характер, к которым относятся погрешности, вызванные пространственно-временной изменчивостью поля скорости звука в районе съемки; погрешности, вызванные отклонением мгновенного уровня от наблюдаемого на уровневом посту; погрешности, связанные с определением положения и ориентации приборной системы координат в судовую систему координат. При поиске подводных объектов и трубопроводов при малой толщине ила заиленным трубопроводом необходимо использование только высоконаправленных систем для получения высокого разрешения. При этом система должна быть низкочастотной для хорошего проникновения сигнала в толщу донных осадков. Проблема контроля трубопроводов и определения параметров границ континентального шельфа/возникает, как правило, на мелководье, что требует ограниченных габаритов антенн. С учетом сравнительно небольших размеров заиленных объектов необходимо использовать сканирование узкого параметрического луча.
В известном способе съемки рельефа дна (патент RU №2434246 [4], повышение точности съемки рельефа дна по сравнению с известным способом [3] достигается за счет того, что дополнительно выполняют гидролокационное зондирование дна параметрическим гидролокатором со сканирующей характеристикой направленности, установленным на отличных горизонтах глубины от судовых гидроакустических средств с возможностью их перемещения как в вертикальной, так и в горизонтальной плоскостях методом секторного обзора со сканированием характеристики направленности в режиме излучения параметрической антенны с приемом отраженных сигналов антенной таких же размеров, как антенна накачки параметрической антенны, при этом ширина характеристики направленности в режиме приема превышает величину сектора обзора, а плоскость сканирования антенны отклонена относительно положения вертикальной локации на угол 15 градусов в сторону движения судна.
Однако при решении прикладных задач, например, связанных со строительством подводных трубопроводов на больших глубинах, весьма важным является, чтобы все формы рельефа или искусственные подводные объекты были идентифицированы в ходе батиметрической инструментальной съемки по измеренным глубинам звуковыми сигналами, формируемыми, в частности, высокочастотными многолучевыми эхолотами для получения детальной картины рельефа дна.
При съемке рельефа дна многолучевыми эхолотами глубины в горизонтальной плоскости измеряются (формируются) с определенной дискретностью, которая связана с углом направления луча, способом формирования лучей, частотой многолучевого эхолота, разрешающей способностью формирования луча. Причем эта дискретность является в общем случае функцией глубины L=f(H).
Например, для высокочастотного многолучевого эхолота типа ЕМ 100, используемого при проведении батиметрической инструментальной съемки при проектных работах при прокладке подводных магистральных трубопроводов для транспортировки углеводородов, горизонтальная дискретность распределения глубин на равном расстоянии в мелководном режиме равна L=6,3%Н, где Н - глубина. При распределении глубин на равных углах это расстояние на боковых лучах увеличивается по сравнению с центральными лучами. Это приводит к тому, что при увеличении глубины съемки возможен пропуск опасной для трубопровода формы рельефа. С точки зрения проектирования параметров трубопровода пересечение трубопроводом такой опасной формы приводит к увеличению свободного пролета трубы и увеличению нагрузки в точке касания трубы с рельефом опасной формы. При проектировании параметров трубопровода основой является батиметрический профиль, и отсутствие фиксации на профиле опасной глубины в реальных условиях может приводить к превышению допустимых нагрузок на трубу и соответственно к ее повреждению, поэтому задача определения вероятности пропуска опасной формы рельефа при проведении батиметрической съемке является весьма актуальной. Известные также способы съемки рельефа дна (патент RU №2272303С1, 10.12.2006 [5], патент RU №2292062С2, 20.01.2007 [6], патент RU №2326408С1, 10.06.2006 [7], патент ЕР №1426787А1, 09.06.2004 [8]) данную проблему также не решают. Уникальное географическое положение бассейна Северного Ледовитого океана, недостаточный уровень гидрографической и геолого-геофизической изученности, неоднозначность в трактовке глубинного строения его недр, отсутствие четкой концепции формирования этого молодого океана обуславливает значительные сложности в определении внешних границ континентального шельфа для арктических государств в юридических рамках Конвенции ООН по морскому праву 1982 года. Способы определения положения внешней границы континентального шельфа связаны, в первую очередь, с необходимостью вычисления подножия континентального склона по батиметрическим данным. В соответствии с положениями Научно-технического руководства Комиссии ООН по границам континентального шельфа «подножие континентального склона определяется как точка максимального изменения уклона в его основании». Существующие алгоритмы определяют точки локальных максимумов, изменения уклона дна на континентальной окраине. Этих точек может быть большое количество в связи с осложнением рельефа самой континентальной окраины формами низших порядков. Согласно Конвенции максимальное изменение уклона дна (вторая производная рельефа), соответствующее подножью континентального склона (ПКС), должно быть в основании континентального склона (ОКС). Следовательно, важной задачей является определение положения ОКС, которое объективно может базироваться на батиметрической, геоморфологической и геолого-геофизической информации (Международная Конвенция по морскому праву от 1982 г. - М.: Военное изд-во МО СССР, 1985, - 224 с; Научно-техническое руководство комиссии по границам континентального шельфа. Нью-Йорк: Комиссия по границам континентального шельфа. 1999, - 92 с). Задачей предлагаемого технического решения является расширение функциональных возможностей с одновременным повышением достоверности и информативности при картировании рельефа дна акватории по измеренным глубинам посредством гидроакустических средств измерения.
Поставленная задача решается за счет того, что в способе съемки рельефа дна акватории([4] -прототип), включающем излучение гидроакустических сигналов в направлении дна, прием отраженных от поверхности дна сигналов, измерение расстояний от приемоизлучающей антенны до дна, определение координат судна по внешним источникам информации, измерение бортовой, килевой и вертикальной качки, истинного курса и скорости судна, привязку результатов измерений по времени, определение истинных значений глубин с определением поправки за отклонение действительной скорости звука в воде от расчетной, картирование полученной информации с определением геодезических координат измеренных глубин, в котором при картировании рельефа дна выполняют сопряжение топографических и навигационных растровых карт, дополнительно выполняют гидролокационное зондирование дна гидролокатором и/или промерным эхолотом, установленными на отличных горизонтах глубины от судовых гидроакустических средств с возможностью их перемещения как в вертикальной, так и в горизонтальной плоскостях методом секторного обзора со сканированием характеристики направленности в режиме излучения параметрической антенны с приемом отраженных сигналов антенной таких же размеров, как антенна накачки параметрической антенны, при этом ширина характеристики направленности в режиме приема превышает величину сектора обзора, а плоскость сканирования антенны отклонена относительно положения вертикальной локации на угол 15° в сторону движения судна, в котором в отличие от прототипа одновременно с излучением гидроакустических сигналов в направлении дна выполняют магнитную съемку посредством градиентометра, буксируемого на расстоянии 5 м от дна, сейсмоакустическое профилирование посредством профилографа с рабочей частотой 3,5 кГц, измеряют уровень моря, при обработке значений измеренных глубин дополнительно выполняют линейную интерполяцию полученной поверхности дна через триангуляции, при картировании полученной информации с определением геодезических координат измеренных глубин выполняют оценку степени пространственной однородности покрытия точками измерения района промера путем определения внешних границ (контура) области промера, а в устройство для съемки рельефа дна акватории, состоящее из приемоизлучающей антенны, передающего блока, приемоизмерительного блока, блока управления, блока определения средней скорости распространения звука в воде, блока сбора, обработки информации и картирования рельефа дна, многолучевого эхолота, модуля визуализации области рельефа, гидроакустического доплеровского лага, приемника спутниковой навигационной системы, курсовой системы, измерителей качки, дополнительно введены буксируемый градиентометр, профилограф и измеритель уровня моря, соединенные своими выходами с входами блока сбора, обработки информации и картирования рельефа дна.
Сущность изобретения поясняется чертежами (фиг.1-7).
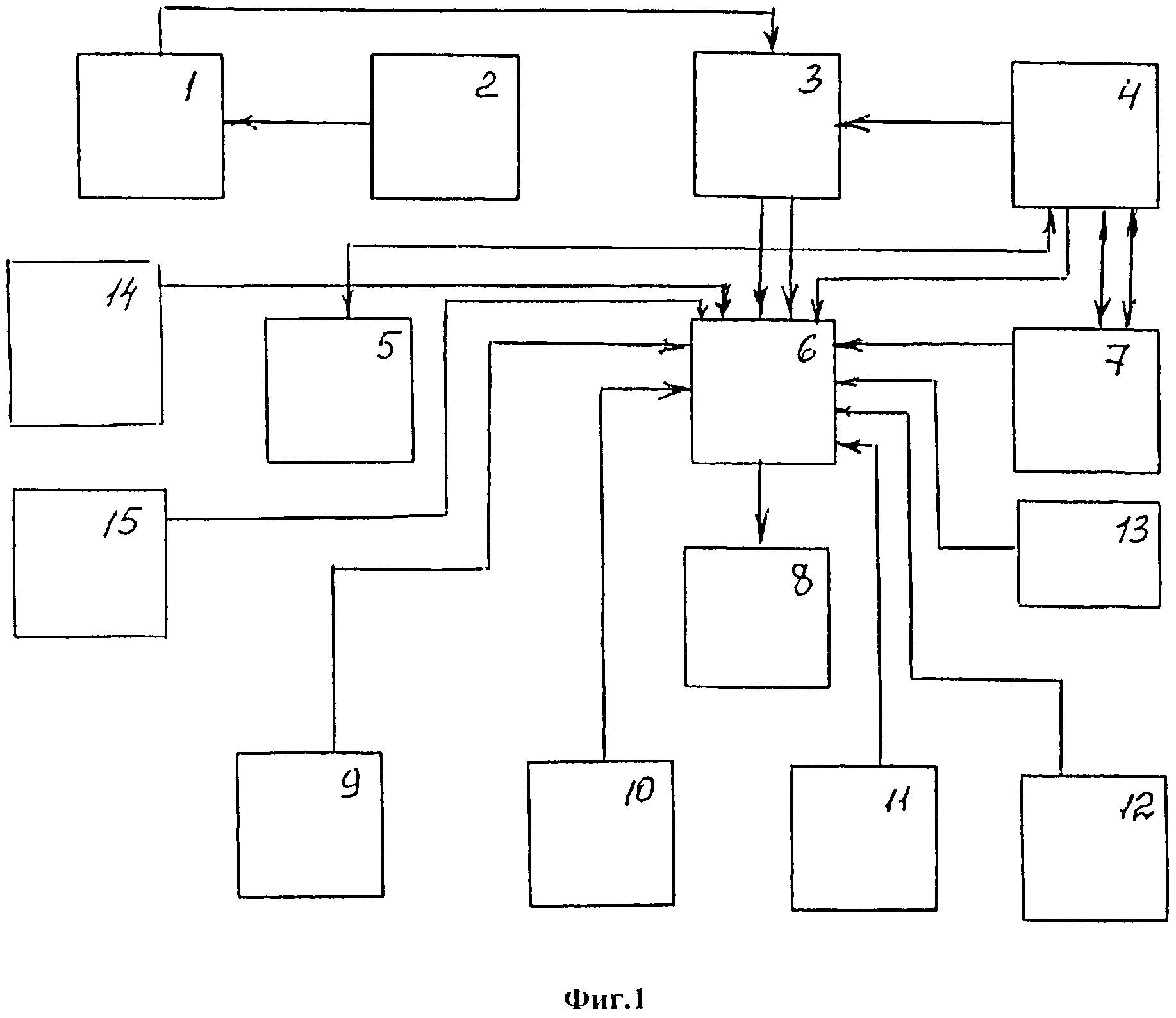
Фиг.1. Структурная блок-схема устройства. Устройство для съемки рельефа дна акватории состоит из приемоизлучающей антенны 1, передающего блока 2, приемоизмерительного блока 3, блока управления 4, блока определения средней скорости распространения звука в воде 5, блока сбора, обработки информации и картирования рельефа дна 6, многолучевого эхолота 7, модуля визуализации области рельефа 8, гидроакустического доплеровского лага 9, приемника 10 спутниковой навигационной системы, курсовой системы 11, измерителей качки 12, буксируемого градиентометра 13, профилографа 14, измерителя уровня моря 15.
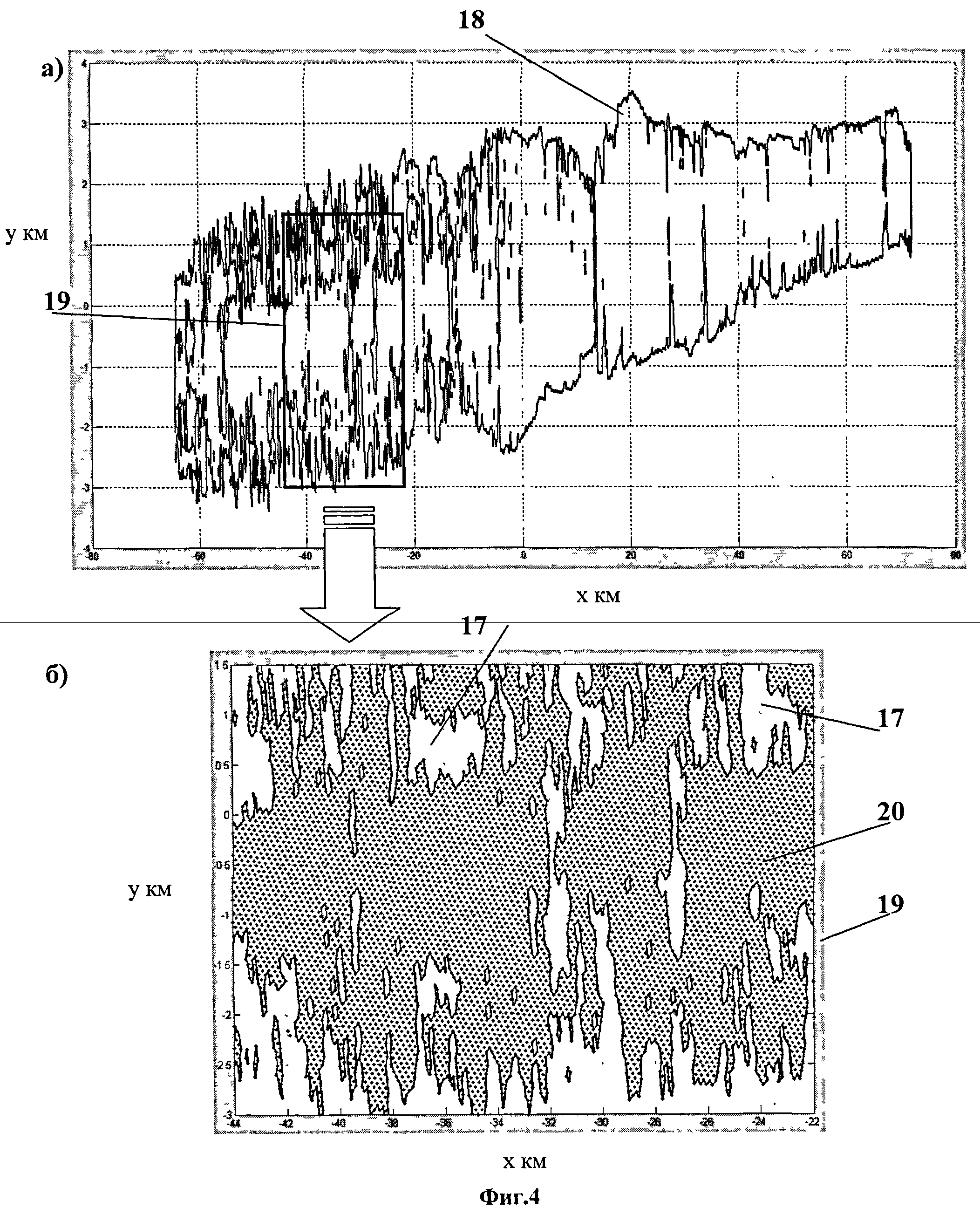
На чертежах (фиг.2-4) приведены иллюстрации применения алгоритма вычисления контура области съемки многолучевым эхолотом к конкретным измерениям, полученным многолучевым эхолотом.
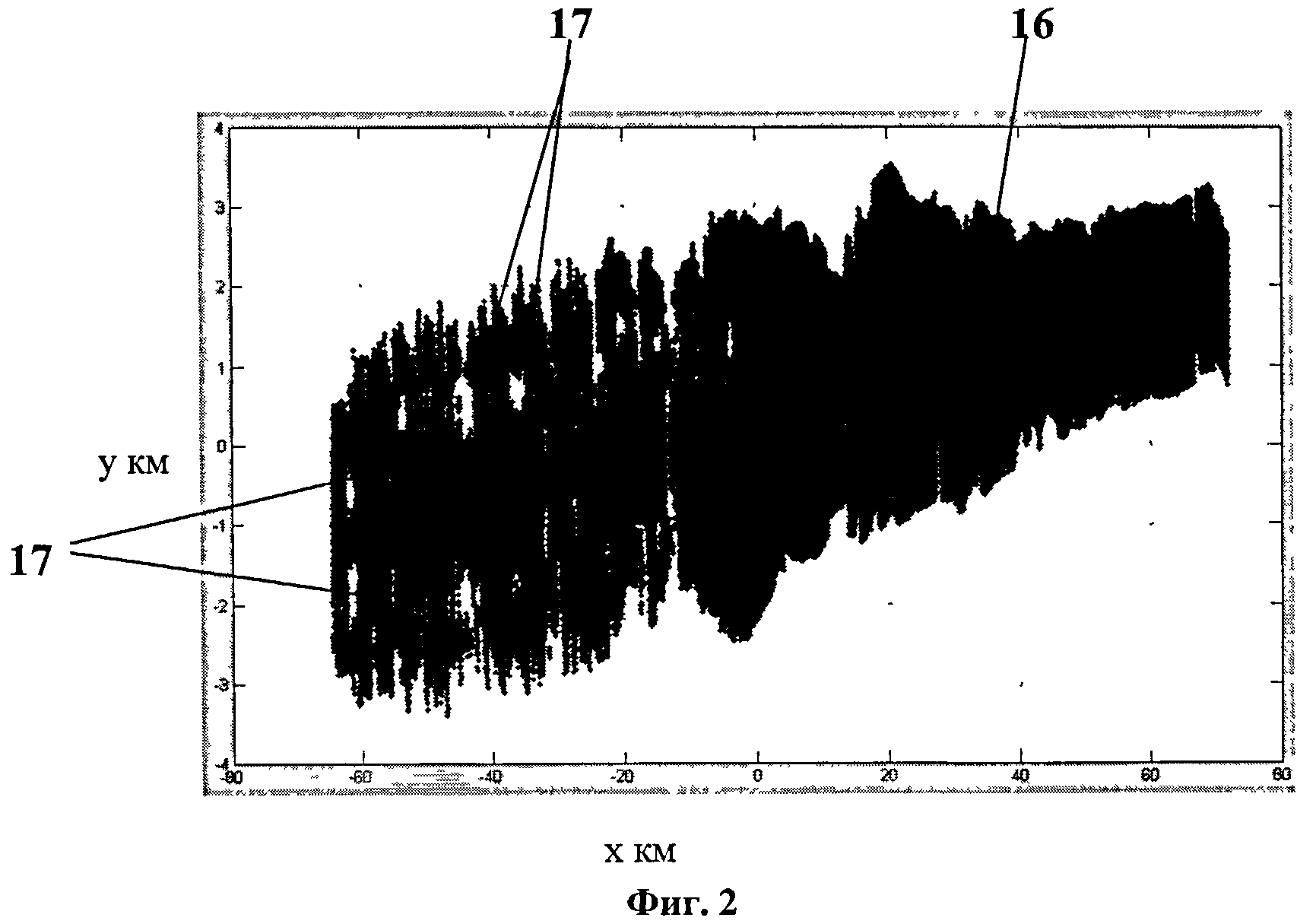
Фиг.2. Точки координат измерений многолучевым эхолотом - стереографическая проекция. Точки измерений 16, пропуски измерений 17.
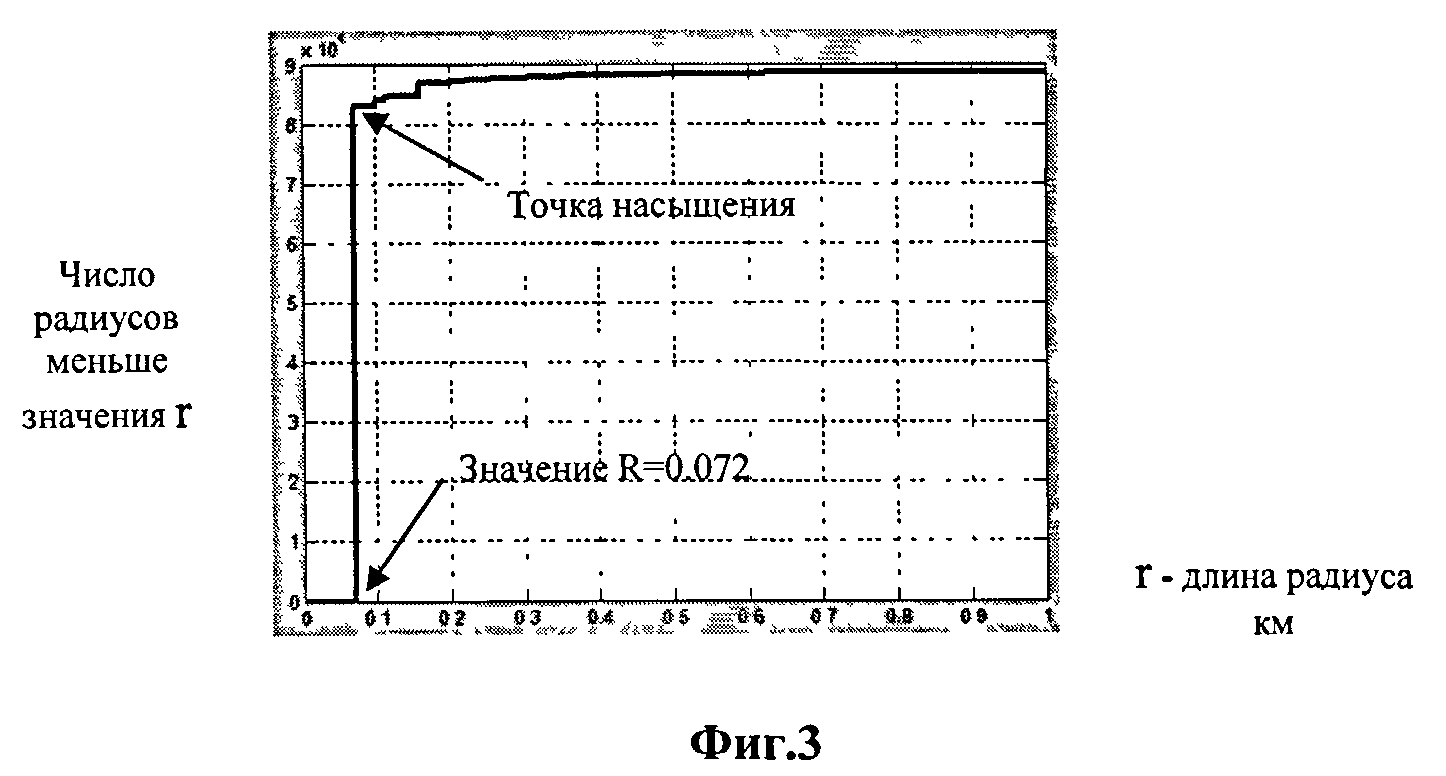
Фиг.3. График функции распределения радиусов окружностей, описанных вокруг треугольников.
Фиг.4. Контуры внешних границ и пропусков, вычисленные по алгоритму для съемки (стереографическая проекция, фиг.2). Фиг.4а - общая картина съемки. Фиг.4б - увеличенный выделенный участок. Контуры внешних границ 18 съемки, пропуски измерений 17, выделенный участок 19 съемки, координаты 20 измеренных глубин.
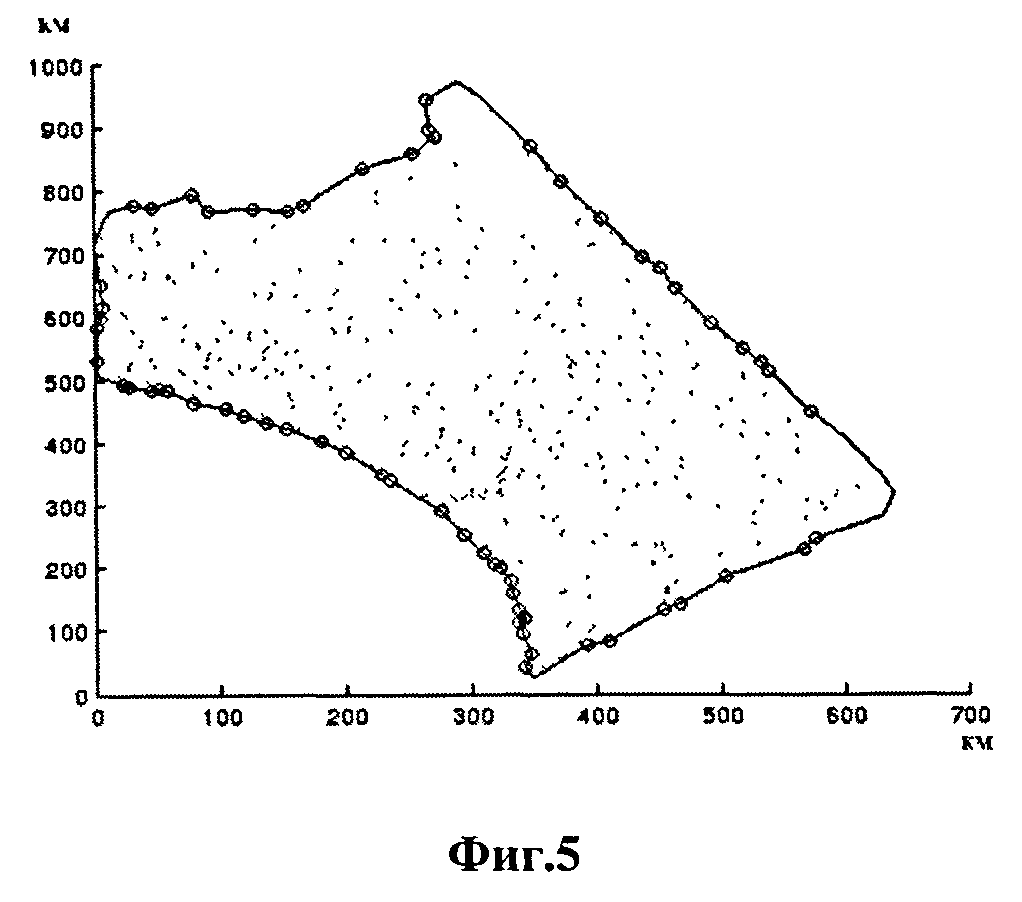
Фиг.5. Пример выполнения линейной интерполяция через триангуляции.
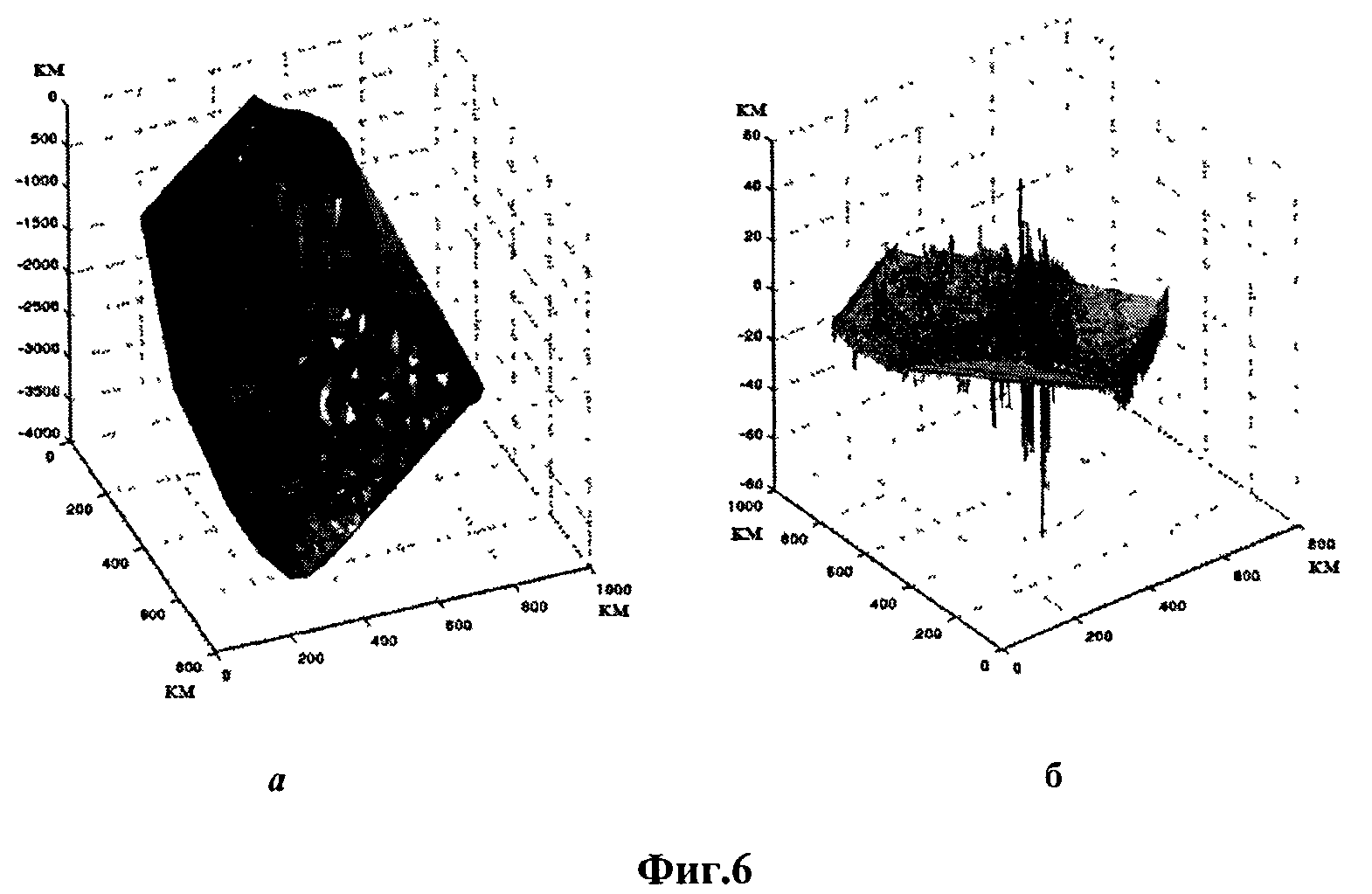
Фиг.6. Пример построения поверхности вторых производных в направлении градиента, соответствующей максимальному изменению уклона основания в данной точке, посредством алгоритма построения поверхности нормы матрицы второй производной от глубины. Фиг.6а - интерполяция поверхности по замерам глубин. Фиг. 6б - поверхность вторых производных в направлении градиента.
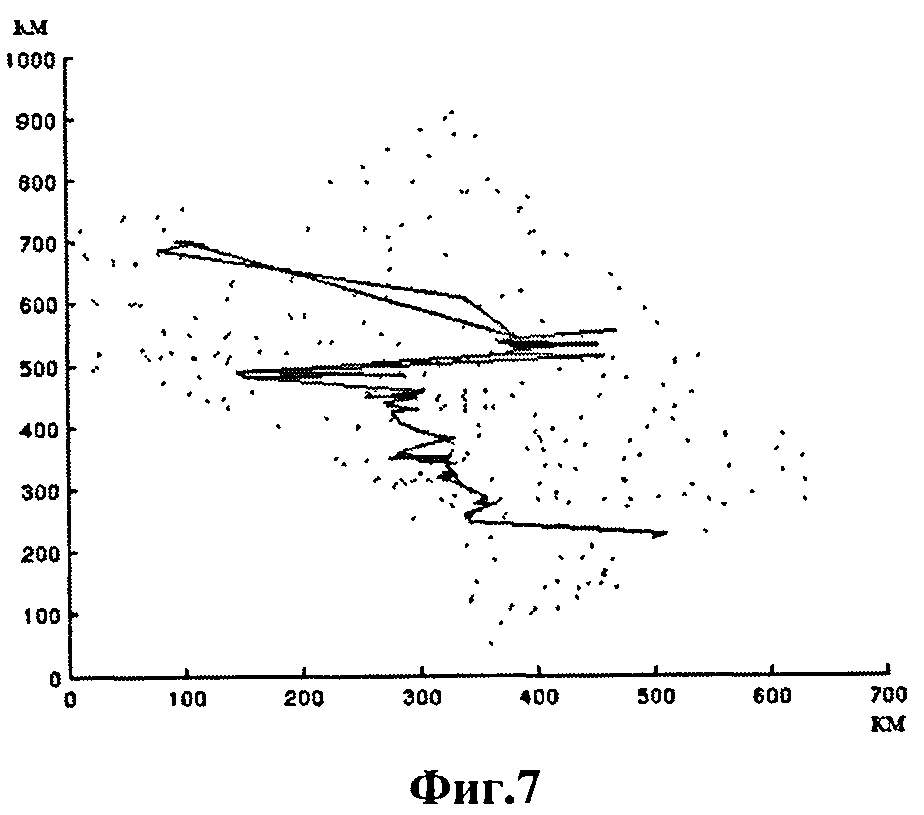
Фиг.7. Пример нахождения линии ПКС (аппроксимация линии ПКС).
Выход приемопередающей антенны 1 (фиг.1) подключен к входу приемоизмерительного блока 3, выход передающего блока 2 соединен с приемоизлучающей антенной 1, выходы приемоизмерительного блока 3 подключены к входу блока сбора, обработки информации и картирования рельефа дна акватории 6, входы которого соединены с выходами судовых измерителей составляющих качки, курса, скорости и координат, а блок управления 4 соединен с передающим блоком 2, приемоизмерительным блоком 3 и блоком сбора информации, обработки и картирования рельефа дна 6. Вход блока определения средней скорости распространения звука в воде 5 в направлении излучения гидроакустического сигнала через блок управления 4 соединен с выходом судового гидроакустического доплеровского лага 9 и выходом приемника спутниковой навигационной системы, а выход соединен с входом блока сбора, обработки информации и картирования рельефа дна 6 акватории, многолучевой эхолот 7 соединен своими входами-выходами с блоком управления 4 и входом блока сбора, обработки информации и картирования рельефа дна акватории 6, модуль визуализации области рельефа 8, соединен своим входом с выходом блока сбора, обработки и картирования рельефа дна акватории 6. Буксируемый градиентометр 13, профилограф 14 и измеритель уровня моря 15 соединены своими выходами с входами блока сбора, обработки информации и картирования рельефа дна 6. Устройство и принцип действия блоков 1-9 аналогичны устройствам и принципу действия блоков 1-6 прототипа [4]. При этом, как и в прототипе, приемоизлучающая антенна 1 собрана из пьезокерамических акустических преобразователей, размещенных в одном корпусе, которые используются как для излучения, так и приема отраженных от дна сигналов. В цикле излучения эти преобразователи соединены параллельно, а во время приема эхо-сигналов они работают независимо друг от друга.
Передающий блок 2 состоит из кварцевого генератора стабилизированного по частоте, формирователя периода следования излучаемых импульсов, устройства формирования длительности излучаемого импульса, синхронизатора, устройства квантования, усилителя мощности, преобразователя, коммутатора.
Генератор вырабатывает непрерывные колебания частотой 4,8 МГц, которая посредством синхронизатора снижается до 600 кГц, и формируется импульс излучения. Усилитель мощности усиливает импульс до величины, необходимой для возбуждения электроакустических преобразователей приемоизлучающей антенны 1. Посредством коммутатора преобразователи приемоизлучающей антенны 1 во время излучения подключаются к передающему блоку 2, а во время приема к приемоизмерительному блоку 3.
Приемоизмерительный блок 3 состоит из блока полосовых усилителей, антенного усилителя, основного усилителя, блока формирователей кодов управления, блока фильтров, амплитудного детектора, фильтра нижних частот, коммутатора, выходного усилителя и предназначен для приема, усиления и частотной селекции принятых сигналов.
Блок управления 4 состоит из ПЗУ микрокоманд, ПЗУ управления выбором адреса, БИС микропрограммного управления, двух микропроцессоров, ПЗУ, ОЗУ, схемы формирования переносов, трех буферных регистров и пяти магистралей: магистрали адреса, магистрали микрокоманд, магистрали D, магистрали М, магистрали L, и предназначен для выработки и трансляции команд и информационных файлов с принимаемой от внешних источников информации, а также информации, находящейся в ПЗУ.
Блок определения средней скорости распространения звука в воде 5 состоит из дешифратора микрокоманд, буферных каскадов, регистра адреса, арифметико-логического устройства, мультиплексоров, дешифратора, магистрали А, магистрали D, аккумулятора.
Блок сбора, обработки информации и картирования рельефа дна 6 состоит из приемных регистров, блока системной магистрали, усилителя, диспетчера памяти, операционного блока, блока управления потоком команд, блока микропрограммного управления, блока прерываний, выходных регистров.
Многолучевой эхолот 7 представляет собой многолучевой эхолот со сложным линейно-частотным модулированным сигналом и предназначен для измерения глубин от 20 до 6000 м. Развертка мощности принятых сигналов осуществляется по дальности и углу. Характер изменения мощности в луче с дальностью зависит от формы рельефа дна. Из 32 приемных каналов формируют 256 лучей, что позволяет получить квазинепрерывный профиль рельефа. Приемная антенна многолучевого эхолота 3 диапазона частот 30 кГц состоит из 32 элементов.
Буксируемый градиентометр 13 предназначен для магнитной съемки и представляет собой протонный градиентометр типа «Sea SPY» или «Marine Magnetic Explorer». Буксируемая гандола градиентометра 13 на глубоководных участках буксируется на расстоянии 5 м от дна. Для стабильного удержания буксируемого тела на заданном расстоянии от дна используется лебедка типа «DT VARINE 2005EHLWR» с дистанционным управлением. На мелководных участках буксируемая гандола градиентометра 13 буксируется на поверхности, его местоположение определяется по длине кабеля и расстоянию до антенны GPS спутниковой навигационной системы.
Для определения местоположения судна и датчиков информации с необходимой точностью используется аппаратура потребителей спутниковой навигационной системы GPS в дифференциальном режиме (DGPS), работающих по двум независимым контрольно-корректирующим станциям, а также геодезические контрольно-корректирующие станции для работы в режиме RTK или для приема поправок Starfix HP по спутниковому каналу.
Такая система координирования обеспечивает определение места со средней квадратической погрешностью не более 0,3 м в любой точке района при круглосуточной работе.
Для навигационного обеспечения также использованы базовая геодезическая станция типа «MS 750 Base», судовые приемники типа «Trimble 5700 RTK» и «Trimble DSM 2121», навигационный компьютер с программным обеспечением. Электронная навигационная информационная система (ECDIS), система ECS -1000 с программным обеспечением «dKart Navigator», ультракороткобазисная система подводной навигации типа «Simrad HRP 4 ЮР» для высокоточного определения положения гондолы градиентометра 13 с двумя маяками-ответчиками.
Профилограф 14 представляет собой придонный профилограф типа «SPB Klein 2275» (рабочая частота 3,5кГц, разрешение 75 см, предельная глубина буксировки 600 м).
Измерители качки 12 представляют собой датчики курса и динамических перемещений судна типа «Octans» с компенсацией динамических перемещений 0,01 град по курсу, вертикальным перемещением, бортовой и килевой качке с частотой данных 40 Гц.
В качестве измерителя уровня моря использован измеритель уровня моря 15 типа «ГМУ-2».
Блок определения средней скорости распространения звука в воде 5 представляет собой измеритель скорости звука типа «SVP 15» или типа «ОЛД-1».
Блок сбора, обработки информации и картирования рельефа дна 6 построен на основе программно-математического обеспечения «Trimble Geomatics Office» и геоинформационной системы типа «Mapinfo v.7». Работа устройства заключается в следующем.
По командным импульсам, вырабатываемым блоком управления, в передающем блоке 2 осуществляется формирование акустического импульса и излучение его приемоизлучающей антенной 1 в сторону дна, а также прием и преобразование в электрический сигнал отраженных дном акустических сигналов, трансляция этих сигналов на вход приемоизмерительного блока 3, в котором вырабатываются электрические сигналы, пропорциональные временным задержкам прихода отраженных от поверхности дна сигналов, по которым определяются расстояния от приемоизлучающей антенны 1 до точек отражения сигналов от морского дна. Одновременно по командным импульсам с блока управления 4 электрические сигналы, пропорциональные доплеровскому сдвигу частоты опорного гидроакустического сигнала от судового гидроакустического доплеровского измерителя скорости (лага) (аналогом которого является лаг, описанный в кн.: Абсолютные и относительные лаги / Виноградов К.А., Кошкарев В.И., Осюхин Б.А., Хребтов А.А. // Судостроение, Л., 1990, с.30), и электрические сигналы, пропорциональные геодезическим координатам x, y от судового приемника 10 спутниковой системы, поступают на вход блока определения средней скорости распространения звука в воде 5, в котором определяется средняя скорость распространения звука в воде по алгоритмам, приведенным в [4].
Далее по командным импульсам с блока управления 4 информация с блоков 3, 4 и 5 поступает на блок сбора, обработки информации и картирования рельефа дна 6, на который также поступает информации от судовых измерителей составляющих качки 12 и курса 11.
В блоке 6 определяется поправка к глубинам, измеренным многолучевым эхолотом 7. Информация с многолучевого эхолота 7 поступает на модуль визуализации области рельефа 8.
Картирование информации осуществляется нанесением геодезических координат точек отражения гидроакустических сигналов от морского дна на планшет, который строится путем сопряжения топографических и навигационных растровых карт в следующей последовательности:
- растр навигационной карты в проекции Меркатора подвергается векторизации береговой линии навигационной карты;
- выполняется выборка участка, соответствующего морской акватории, на которой производится съемка рельефа дна с учетом векторизации береговой линии навигационной карты;
- производится запись в итоговый растр навигационной карты;
- растр топографической карты в проекции Гаусса-Крюгера приводится к масштабу навигационной карты;
- выполняется преобразование координат проекции Гаусса-Крюгера в географические координаты;
- выполняется преобразование географических координат в координаты проекции Меркатора;
- производится выборка участка растра, соответствующего сухопутной (береговой) области;
- выполняется запись в итоговый растр топографической карты;
- по результатам записей в итоговые растры навигационной и топографической карты строится итоговая растровая карта совмещенной навигационной и топографической информации в Меркаторской проекции;
- на итоговой растровой карте, выводимой на устройство индикации, также отображается путь судна.
При визуализации зарегистрированной области рельефа дна данные для VRML интерпретатора формируются в оперативной памяти компьютера вычислительного устройства с последующей загрузкой в интерпретатор. Для чего в загрузочный VRML файл включен узел JavaScript, функции которого контролируют область видимого пространства. Программными инструментами для картографической визуализации служат структуры данных в формате SVG, который поддерживает векторные и растровые данные.
Отображение в браузере данных в формате SVG осуществляется интерпретатором декларативного языка SVG. Данные в структуре SVG формируются аналогично формированию данных в формате VRML. На основе данных в структуре XML (геопространственная информация), получаемых от базы данных по запросу, проводится конвертация в памяти браузера в структуру SVG с помощью XSLT-T. Для одновременного представления геопространственных данных в двумерном и трехмерном представлении осуществляется поддержка синхронизации навигации по той и другой сцене. На картографической сцене отображается прямоугольник, соответствующий текущей области пространства, данные о которой загружены в память интерпретатора VRML. Синхронизация со стороны SVG осуществляется на основе функций JavaScript, встроенных в SVG и HTML. Так как синхронизацию со стороны VRML осуществить сложнее, то в загрузочный файл VRML включен узел JavaScript с навигационными функциями, не позволяющими трехмерному изображению выходить за рамки окна зрения и постоянно отслеживающими координаты окна зрения. Эти координаты служат необходимой информацией для синхронизации с картографической сценой, которая возможна с использованием таймера HTML.
Система навигации построена с использованием альтернативного по отношению к известной технологии GA принципа организации точки наблюдения трехмерной сцены, в которой используется стандартный принцип - точка наблюдения расположена вне сцены и при навигации сцена неподвижна, а изменяются координаты точки наблюдения и угол наблюдения. При этом центр вращения явно не определяется, что и является одной из причин потери изображения при навигации. В предлагаемой технологии точка наблюдения находится постоянно в центре окна наблюдения и визуализируется небольшим трехгранником осей, а начало трехгранника всегда является центром вращения изображения и при навигации сцена перемещается относительно этого центра. Информация с блока 6 поступает на модуль визуализации области рельефа 8, посредством которого выполняют интерполяцию точек высот (глубин) методами двумерных сплайн-функций, а конкретно в виде двумерных нерегулярных рациональных фундаментальных сплайнов (NURBS) (см., например: Голованов Н.Н. Геометрическое моделирование. М., Физатлит, 2002. - 472 с), математические выражения которых не приводятся по причине отсутствия достаточного места. Преимуществом предлагаемого способа является выполнение интерполяции точек высот в виде двумерных рациональных двумерных сплайн-функций NURBS, что позволяет построить гладкую поверхность для любой формы рельефа, даже для обрывов с отрицательным углом наклона. Во-вторых, поверхность рельефа задается аналитической зависимостью, т.е. конечным набором параметров фиксированного набора функций (полиномиальных сплайнов). Аналитическая форма задания рельефа, т.е. в виде суперпозиции аналитических функций от двух переменных, позволяет использовать весь аппарат дифференциальной геометрии для описания морфометрических свойств рельефа, например, вычисления значения функции (высоту, глубину) или ее дифференциала (уклон) в любой точке (точках) области задания функции. В-третьих, NURBS обеспечивают возможность локального редактирования формы поверхности. Кроме того, для одной и той же области земли объем массива данных ЦМР при использовании NUBRS будет как минимум на порядок меньше, чем при традиционном точечном представлении. Следовательно, применение NURBS повышает эффективность автоматизированных геопространственных систем за счет уменьшения времени обработки и требуемого объема памяти. Применение NURBS в вычислительной технике - уже давно свершившийся факт - в графических пакетах всех операционных систем встроены алгоритмы обработки и визуализации NURBS, например в графических пакетах низкого уровня: DirectX и OpenGL для Windows. Однако при построении ЦМР возникают препятствия, связанные с эффектом возникновения в некоторых ситуациях нарушения монотонности в изменении поверхности - локальное появление ложных осцилляций. В заявляемом способе это препятствие устраняется либо путем добавления новых точек в массив для интерполяции, либо путем использования методов изогеометрической аппроксимации сплайнами. В первом случае разрешение проблемы связано с повышением значимости работы эксперта в итерационной процедуре построения NURBS, во втором - с существенным усложнением математических алгоритмов технологии.
В предлагаемом способе реализована технология построения ЦМР на основе NURBS в виде итерационной экспертной автоматизированной процедуры. В качестве языка программирования использован язык MatLab. В этой системе качество построения ЦМР определяется путем экспертного сравнения положения изолиний, вычисленных по NURBS, с положением соответствующих изогипс (изобат) на исходной карте. В конкретной реализации предлагаемого способа источником информации о рельефе служат растровые карты.
В общем случае при аппроксимации профиля рельефа одномерными сплайнами следует задавать значения двух первых производных в конечных точках разреза. Однако такая информация неизвестна, и получить ее на практике нельзя. Поэтому в качестве базового сплайна для аппроксимации профиля рельефа по разрезу использован простейший кубический сплайн с нулевыми граничными производными. Ввиду того что не существует никаких явно заданных двумерных сплайнов, так как нельзя построить бесконечную систему алгебраических уравнений для согласования двух первых производных по всем направлениям на смежных границах двух кусков сплайновой поверхности, построение двумерной сплайн-функции производится с использованием тензорного произведения одномерных сплайнов. Согласование первых двух дифференциалов ЦРМ для смежных прямоугольных участков карты обеспечивается перекрытием областей задания смежных NURBS.
Таким образом, технология построения ЦМР в аналитическом виде на основе NURBS позволяет исключить этап триангуляции и тем самым исключить недостатки существующих технологий. Предлагаемая реализация технологии может быть адаптирована к другим типам исходной информации, и в нее могут быть включены более сложные типы базовых сплайнов.
При использовании заявляемого способа и устройства для его осуществления, предназначенного для съемки рельефа дна акватории, выполняется требование к точности определения глубины при съемке рельефа дна акватории, установленное действующими нормативными документами, что обусловлено возможностью измерения доплеровского сдвига частоты опорного гидроакустического сигнала гидроакустического доплеровского лага, абсолютной скорости движения судна с эхолотом по внешним источникам информации (например, спутниковой навигационной системы типа GPS), по которым определяют среднюю вертикальную скорость распространения звука в водной среде. При съемке рельефа дна эхолотом средняя квадратическая погрешность определения вертикальной скорости распространения звука не должна превышать ±7,5 м/с. Выполнение данного требования может быть обеспечено, если скорость движения судна будет определяться со средней квадратической погрешностью, не превышающей ±0,037 м/с, что возможно выполнить при условии определения геодезических координат со средней квадратической погрешностью, не превышающей ±7,8 м.
Установленные на гидрографических судах навигационные системы, в частности совмещенные приемоиндикаторы спутниковых и радионавигационных систем берегового базирования, позволяют определять геодезические координаты с точностью ±6,0 м, а при их работе в дифференциальном режиме с точностью ±3,0 м.
При сопряжении топографических и навигационных растровых карт при картировании рельефа дна ошибки получаемой растровой карты составляют не более двух пикселей. Например, для масштаба карт 1:250000 с разрешением 400 dpi это составляет 30 м на поверхности земли, что не превышает ошибок самой растровой карты.
В процессе съемки из множества измеренных глубин отбираются информативные глубины, которые исправляются поправками за скорость звука и привязываются к рассчитанным вероятнейшим координатам для нанесения на рабочий планшет и оперативной оценки качества съемки.
Далее выполняют оценку степени пространственной однородности покрытия точками измерения района промера, а именно: точных внешних границ (контура) области промера, наличия разрывов, локальных пропусков (дыр) и их границ в соответствии с алгоритмом вычисления контура области съемки многолучевым эхолотом 7.
Результаты съемок многолучевым эхолотом представляют собой большие массивы (файлы) данных, включающих значения широты, долготы и глубины при прохождении промерного галса. По представленным результатам промера возникает проблема оценки степени пространственной однородности покрытия точками измерения района промера, а именно: точных внешних границ (контура) области промера, наличия разрывов, локальных пропусков (дыр) и их границ. В свою очередь, определение этих границ промера многолучевым эхолотом 7 позволит точно установить площадь выполненной съемки.
Учитывая большой объем измерений, получаемый с помощью многолучевого эхолота 7, решение задачи определения нахождение границ промера следует искать с помощью средств автоматизации вычислений на ЭВМ. Для построения автоматизированного алгоритма вычисления границ промера необходимо формализовать представление о пропуске между точками измерения глубины. Построение автоматизированного алгоритма основано на теории вычислительной топологии (см., например: Zomorodian А. Topology for Computing. - ser. Cambr. Mon. Appl. Сотр. Math. Cambr. Univ. Press, 2005, 259 p.).
Ядро алгоритма состоит в следующем. Для простоты полагаем, что координаты точек измерений заданы на евклидовой плоскости с естественной метрикой (расстоянием между точками). По существу множество координат точек {xi, yi} (i=[1, N]) измерения глубин многолучевым эхолотом 7 представляет собой неупорядоченное "облако" точек. Для упорядочивания множества координат точек необходимо задать некоторую упорядочивающую формальную структуру. Выберем в качестве такой структуры триангуляционную сеть. Тогда эта сеть задает массив наборов из трех точек {i1, i2, i3}, образующих треугольник в этой триангуляции. Собственно говоря, массив {i1, i2, i3} и задает упорядочивающую структуру на {xi, yi}.
Технология измерения многолучевым эхолотом 7 предполагает получение точек измерения, "равномерно" распределенных по пространству, то есть с почти одинаковыми расстояниями между соседними точками. Обозначим это расстояние символом R. С этой точки зрения структура, задаваемая множеством {i1, i2, i3}, избыточна. Действительно, по построению множество {i1, i2, i3} включает треугольники, длины сторон которых произвольны, то есть они определяются только общим процессом триангуляции. Следовательно, множество {i1, i2, i3} включает как треугольники с малыми длинами сторон, образованными близкими внутренними точками, так и треугольники с большими длинами сторон, образованными граничными треугольниками, стороны которых образуют выпуклую оболочку {xi, yi}. (Выпуклая оболочка {xi, yi} - это наименьшее выпуклое множество точек плоскости, содержащее {xi, yi}).
Исключим из множества {i1, i2, i3} треугольники, для которых длина какой-либо стороны превышает значение R. В результате получим множество {i1, i2, i3}≤R треугольников, у которых все стороны меньше или равны R. Тогда объединение множества треугольников {i1, i2, i3}≤R будет определять точную область, покрытую съемкой многолучевым эхолотом.
По построению триангуляции во множестве {i1, i2, i3} каждое ребро {i1, i2} триангуляции входит в состав сторон либо двух треугольников, либо одного. Очевидно, что границу этой области составляют только те стороны треугольников множества {i1, i2, i3}≤R, которые представлены в {i1, i2, i3}≤R в единственном экземпляре. Соответствующие этим сторонам треугольники является граничными. В то же время, если некоторая сторона треугольника представлена в {i1, i2, i3}≤R более чем одним экземпляром, то она лежит внутри области (за возможным исключением концевой (концевых) точки). Будем обозначать множество граничных сторон треугольников символом {i1i2,}≤R;Г.
Весь алгоритм вычисления контура области съемки многолучевым эхолотом 7 представляет собой простую линейную последовательность вычислений.
Вход: массив широт и долгот точек измерения многолучевым эхолотом - {φi, λi}.
Шаг 1. Для {φi, λi} вычисляют среднюю арифметическую долготу и широту - [φ0, λ0].
Шаг 2. Преобразовывают географические координаты {φi, λi} в стереографические координаты {xi, yi}. Полюсом стереографической проекции задают значения [φ0, λ0].
Шаг 3. Триангулируют {xi, yi} методом Делоне. Результат - {i1, i2, i3}.
Шаг 4. Вычисляют длины сторон треугольников {i1, i2, i3}. Результат - множество {l(i1i2)}.
Шаг 5. Вычисляют значение R: найти функцию распределения {l(i1i2)}, значение R равно значению длины, при котором достигается насыщение функции распределения {l(i1i2)} (см. фиг.3).
Шаг 6. Находят множество, {i1, i2, i3}≤R.
Шаг 7. Находят множество {i1i2}≤R;Г.
Шаг 8. Используя {i1, i2, i3}≤R и {i1i2}≤R;Г, определяют связную последовательность граничных сторон - множество {Pj} (j=[1, K]. Всего K многоугольников. Каждая связная последовательность образует простой многоугольник. Каждый многоугольник определяет либо внешнюю границу, либо внутреннюю (границу дыры).
Шаг 9. Используя {x1, y1} и {Pj}, определяют множество координат угловых точек границ многоугольников - {XYj}.
Шаг 10. Используя {XYj}, определяют множество {XYn}OL (n=[1, N], N≤K) наборов угловых точек многоугольников, образующих внешние границы. Критерий: многоугольники из множества попарно не пересекаются [XYn}OL (за исключением, может быть, касания одной точкой многоугольника границы другого).
Шаг 11. Исключив множество {XYn}OL из {XYj}, получают {XYm}H(m=[1, M], M=N-K) - множество наборов угловых точек многоугольников, составляющих внутренние границы (границы дыр). Если {XYm}H не пусто, то для каждого многоугольника из {XYn}OL найти индексы Inch тех многоугольников из {XYm}H, которые полностью в нем лежат.
Шаг 12. Преобразовывают стереографические координаты {XYm}OL и {XYm}H в географические координаты {φλn}OL и {φλm}H, учитывая, что в соответствии с шагом 2 полюсом стереографической проекции являлись значения [φ0, λ0].
Выход: Географические координаты угловых внешних {φλn}OL и внутренних {φλm}H многоугольников, множество индексов вложенности внутренних многоугольников во внешние многоугольники.
Преобразование географических координат в стереографические обусловлено необходимостью перехода от сферической к евклидовой метрике.
Использование метода Делоне определяется экстремальными свойствами триангуляции, получаемой этим методом (см., например: D'Azevedo Е.F., Simpson R.В. On optimal interpolation triangle incidences. // SIAM J. Sci. Statist. Comput., 1989. 10 (6). P. 1063-1075). В частности для триангуляции Делоне характеристическим свойством является то, что внутрь окружности, описанной вокруг каждого треугольника, попадают только точки, образующие этот треугольник. Треугольники триангуляции Делоне "стабильны" в том смысле, что они наиболее похожи на правильные и их размеры стремятся быть одинаковыми.
В качестве R можно использовать не только тривиальную евклидову метрику - длину ребра треугольника, но и другие изоморфные ей метрики, например, радиус описанной вокруг треугольника окружности. Последнее обусловлено тем, что триангуляция Делоне минимизирует максимальный радиус описанной окружности среди всех треугольников триангуляции.
Выходные данные алгоритма позволяют вычислить полную площадь, покрытую гидрографической съемкой многолучевым эхолотом 7. Однако, если в тех случаях, когда координаты контуров границ не важны, а нужно только оценить площадь съемки, то работу алгоритма можно завершить шагом 6. Затем, используя {φi, λi}, вычислить площадь каждого сферического треугольника из {i1, i2, i3}≤R и сложить, получив искомую общую площадь съемки.
На рисунках (фиг.2-4) приведены иллюстрации применения алгоритма к конкретным измерениям, полученным многолучевым эхолотом 7.
Определение этих границ промера многолучевым эхолотом 7 позволит точно установить площадь выполненной съемки.
Для определения подножия континентального склона (ПКС) разработаны алгоритмы, основанные на трехмерном определении подножия континентального склона, т.е. определение ПКС осуществляется по всей площади распределения измеренных глубин, в то время как в известных способах, алгоритмы разработаны на основе двухмерного определения ПКС, т.е. определение ПКС осуществляется по профилю глубин. Данные алгоритмы разработаны в пакете прикладных программ Math Lab.
Входными данными алгоритмов является база батиметрических данных, составленных на основе планшетов промеров глубин. Планшет представляет собой массив двумерных координат точек и глубин в этих точках. Погрешность промеров по глубине составляет 1% от абсолютной величины. Множество точек измерения, распределенных неравномерно, образуют многоугольник с невыпуклой границей и вершинами в «граничных» точках.
Ввиду вводимой рандомизации на выходе алгоритмов получается полоса, задаваемая двумя ограничивающими крайними ломаными линиями. Ломаные линии заданы как последовательность отрезков на планшете. Самые крайние из этих линий образуют полосу, внутри которой и лежит реальная линия ПКС. Ширина этой полосы в разных участках планшета меняется, отображая устойчивость данных в том или ином регионе карты. На основании этого можно указать конкретные регионы, в которых глубинная информация требует большего уточнения.
Во избежание погрешности, возникающей при интерполяции поверхности ввиду неравномерности распределения измерений, планшет был ограничен невыпуклым многоугольником для поиска линии ПКС внутри него. Алгоритм основан на построении выпуклой оболочки точек ({xi}, {yi}) методом Грэхема (Graham scan). Алгоритм использует LIFO - структуру (Last In - First Out), «Последний вошел - первый вышел») - стек S, в котором хранятся точки ({xi}, {yi}) - кандидаты на «граничные точки» выпуклой оболочки (в конце работы алгоритма в стеке будут находиться точки, образующие выпуклую оболочку в порядке обхода). Также используются две вспомогательные процедуры - Top(S) и Next_To_Top(S), возвращающие соответственно самую верхнюю и следующую (вторую сверху) за самой верхней точки в стеке. Push(xi, yi), S и Pop(S) - стандартные операции добавления точки в стек (наверх стека) и извлечение (удаление) самой верхней точки.
Псевдокод алгоритма Грэхема заключается в следующем.
Пусть (x0, y0) - точка из множества измерений с минимальной координатой у или самая левая из таких точек при наличии совпадений.
Пусть [(xi, yi,…,(xn, yn)] - остальные точки этого множества, отсортированные в порядке возрастания полярного угла, измеряемого против часовой стрелки относительно точки (x0, y0) (если полярные углы нескольких точек совпадают, то из множества удаляются все эти точки кроме одной, самой дальней от точки (x0, y0)):
Push(x0, y0),
S Push(x1, y1),
S Push(x2, y2), S
For i ← 3 to N do while (угол, образованный точками Top(S) и Next_To_Top(S) и (xi, yi), образует не левый поворот) do
Pop(S)
Push(xi, yi), S
Return S.
Далее, для уменьшения пустого места на границе планшета производится уточнение полученного многоугольника заменой длинных ребер на более короткие. В результате получаем невыпуклый многоугольник, ограничивающий область измерений.
При обработке результатов экспериментальных данных была выбрана линейная интерполяция через триангуляции, так как она обеспечивала наилучшую устойчивость при измерении линии ПКС под действием пробного возмущения (фиг.5).
На основе полученной алгоритмом интерполяции поверхности строится поверхность вторых производных в направлении градиента, соответствующая максимальному изменению уклона основания в данной точке (фиг.6) посредством алгоритма построения поверхности нормы матрицы второй производной от глубины.
На основе модели поверхности вторых производных вычисляется линия ПКС. По каждому планшету вычисляется величина барьера градиента, основанная на дисперсии градиента по всему планшету. Алгоритм начинает работу с точки, лежащей внутри границы планшета на некотором расстоянии от нее. После определения самой высокой точки на поле вторых производных для текущего профиля алгоритм переходит к следующему профилю и находит для него самую высокую точку в смещенной окрестности предыдущей. Выбранные точки, высота которых оказалась больше указанного барьера, образуют последовательность концов отрезков ломаной, задающей аппроксимацию линии ПКС (фиг.7).
Отличительные особенности:
- использование в качестве исходных данных массива двумерных координат точек и глубин в этих точках;
- возможность определения доверительной, в пределах которой с вероятностью 95% лежит подножие континентального шельфа.
Полученные результаты, полностью соответствующие требованиям Комиссии ООН и Научно-технического руководства по границам континентального шельфа, позволяют получить дополнительную информацию для экспертной оценки ПКС, а следовательно, использоваться для определения и обоснования внешней границы континентального шельфа Российской Федерации в СЛО.
Для уверенного обнаружения потенциально опасных объектов коридор шириной 60 м вдоль осевой линии трассы отрабатывается с расстоянием между профилями 10 м. Далее до ширины коридора 400 и 2000 м (участки расширения) шаг между профилями 50 м. Это позволяет уверенно отследить линейно вытянутые объекты - трубы, кабели и пр. Для контроля выполняют промеры по продольным галсам через 1 км.
Съемка рельефа дна проводится многолучевыми эхолотами без пропусков с перекрытием смежных полос. Для съемки рельефа дна применяются многолучевые эхолоты (Sea Beam 1180, Simrad ЕМ 3002). Сонарная съемка выполняется с использованием сонара с частотой 500 кГц. В состав комплекса площадной съемки входят измерители скорости звука и датчики вертикальной качки и крен-дифферента, которые обеспечивают корректуру данных площадной батиметрической и сонарной съемки.
Измеренные глубины в постобработке исправляются глубинами на уровень моря по данным, полученным с измерителя уровня моря 15. По результатам съемки составляются планшеты глубин в масштабе 1:2000.
Практическая реализация заявляемого способа технической сложности не представляет ввиду того, что для его реализации используются штатные измерительные средства, установленные на гидрографических судах, предназначенных для съемки рельефа дна.
Источники информации
1. Коломийчук Н.Д. Гидрография. Л., ГУНиО МО СССР, 1988, с.240-277.
2. Hare R. Depth and position error budgets for multibeam echosounding // International Hydrographic Review. 1995, v.LXXII, №2, p.37-69.
3. Патент RU №2340916.
4. Патент RU №2434246.
5. Патент RU №2272303C1, 10.12.2006.
6. Патент RU №2292062C2, 20.01.2007.
7. Патент RU №2326408C1, 10.06.2006.
8. Патент ЕР №1426787A1, 09.06.2004.
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения

