Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧЕК ПОВЕРХНОСТИ В ТРЕХМЕРНОЙ СИСТЕМЕ КООРДИНАТ
Вид РИД
Изобретение
Изобретение относится к технике определения координат точек поверхности в трехмерной системе координат относительно плоскости отсчета и может быть использовано в различных областях машиностроения для контроля параметров крупногабаритных изделий, отладки и контроля стабильности и точности технологических процессов механической обработки, а также для определения отклонений формы и расположения деталей военных гусеничных машин (ВГМ), подвергшимся внешним воздействиям, в полевых условиях, например определения величины прогиба бортового листа или крыши корпуса ВГМ.
Известен способ определения координат точек поверхности в трехмерной системе координат по ГОСТ 26433.1 для измерения геометрических параметров деталей (изделий, конструкций), таких как: линейные и угловые размеры, отклонения формы и взаимного положения поверхностей, например, отклонения от прямолинейности, плоскостности, прогиб, выпуклость или вогнутость поверхности, с использованием струны на опорах равной высоты для задания линии отсчета и измерительной линейки для снятия отсчетов, либо разновидность этого же способа, предполагающая использование измерительной линейки (или контрольной рейки) на опорах равной высоты, задающих линию отсчета, и измерительной линейки, индикатора или щупа для снятия отсчетов, причем измерения выполняют в размеченных на поверхности точках, количество которых выбирают в зависимости от размеров детали (изделия, конструкции).
К недостаткам известного способа следует отнести необходимость изготовления или установки с выверкой опор равной высоты для каждого конкретного измерения, в каждом из контролируемых сечений детали (изделия, конструкции), и ограничения, накладываемые размерами измерительной линейки и прогибом струны от собственного веса. Кроме того, данный способ труднореализуем для измерения отклонений формы деталей внутри корпуса любой ВГМ.
Известен способ определения координат точек поверхности в трехмерной системе координат по ГОСТ 26433.1 для измерения геометрических параметров деталей, изделий, конструкций, таких как: линейные и угловые размеры, отклонения формы и взаимного положения поверхностей, например отклонения от прямолинейности, плоскостности, прогиб, выпуклость или вогнутость поверхности, по ГОСТ 26877 с использованием стандартизованных средств измерений, например измерительной линейки или штангенрейсмаса, при котором определяют координаты точек поверхности в трехмерной системе координат относительно плоскости отсчета, выбранный в качестве прототипа. В способе-прототипе прилегающая плоскость, служащая плоскостью отсчета, формируется жесткой стальной линейкой (поверочной линейкой) или натянутой стальной струной, прилегающей к верхней поверхности металлопродукции (например, листового проката), а измерения выполняются с помощью измерительной линейки, расположенной перпендикулярно прилегающей плоскости.
К недостаткам известного способа следует отнести ограничения, накладываемые размерами жесткой стальной линейки (поверочной линейки), возможностью установки стальной струны, с обеспечением прилегания к контролируемой поверхности, прогибом стальной струны от собственного веса, и необходимостью удержания измерительной линейки в положении, перпендикулярном прилегающей плоскости, для обеспечения точности отсчета. Кроме того, данный способ труднореализуем для измерения отклонений формы деталей внутри корпуса ВГМ и не рассматривает возможности измерения отклонений формы поверхностей расположенных вертикально.
Технической задачей, на решение которой направлено настоящее изобретение, является создание способа определения координат точек поверхности в трехмерной системе координат лишенного указанных недостатков.
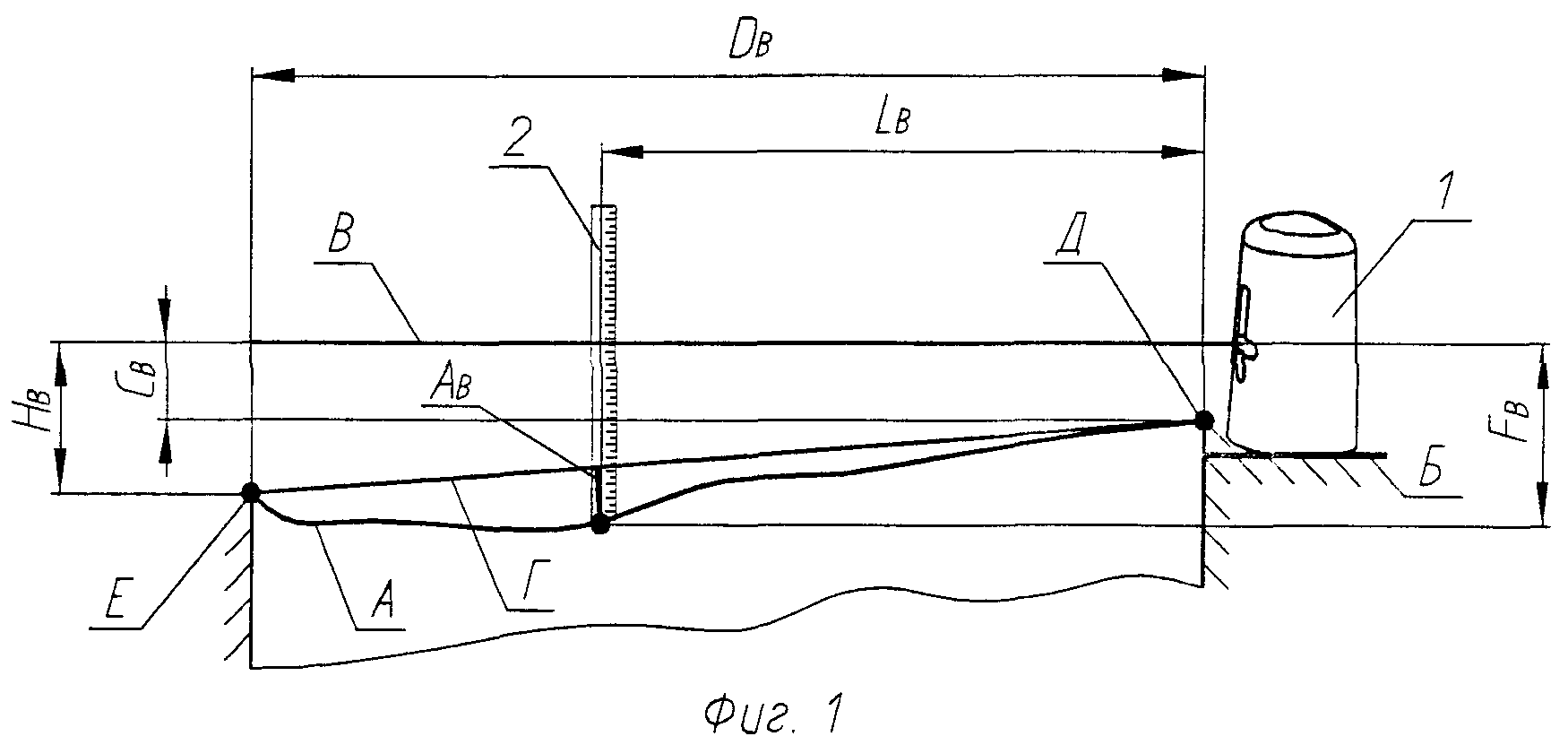
Указанная задача решается тем, что в способе определения координат точек поверхности в трехмерной системе координат для измерения геометрических параметров деталей, изделий, конструкций с использованием стандартизованных средств измерений, например измерительной линейки или штангенрейсмаса, при котором определяют координаты точек поверхности в трехмерной системе координат относительно плоскости отсчета, согласно изобретению, в качестве плоскости отсчета используют горизонтальную или вертикальную плоскости, каждая из которых построена лазерным лучом построителя плоскостей с устройством автоматического горизонтирования лазерного луча, причем построитель плоскостей устанавливают непосредственно на измеряемую или любую другую поверхность, угол наклона которой по отношению к истинному горизонту не превышает угол наклона устройства автоматического горизонтирования лазерного луча построителя плоскостей, при этом каждую координату Ав в вертикальной плоскости сечения любой точки поверхности относительно плоскости, проходящей через измеряемые начальную и конечную точки этой поверхности и перпендикулярной к вертикальной плоскости сечения определяют по формуле:
Ав={[(Fв-Cв)·Dв-Lв·(Hв-Cв)]/(Hв-Cв)}·sin[arctg(Hв-Cв)/Dв], где:
Св - координата наиболее приближенной к горизонтальной плоскости отсчета точки поверхности в вертикальной плоскости, проходящей через измеряемые начальную и конечные точки, мм;
Dв - расстояние между проекциями начальной и конечной точек в горизонтальной плоскости отсчета, мм;
Fв - расстояние от измеряемой точки до горизонтальной плоскости отсчета в вертикальной плоскости, мм;
Нв - координата конечной точки поверхности, наиболее удаленной в горизонтальной плоскости отсчета от начальной точки поверхности в вертикальной плоскости, проходящей через измеряемую конечную точку, мм;
Lв - расстояние от измеряемой точки до начальной точки в горизонтальной плоскости отсчета, мм,
а каждую координату Аг в горизонтальной плоскости сечения любой точки поверхности относительно плоскости, проходящей через измеряемые начальную и конечную точки этой поверхности и перпендикулярной к горизонтальной плоскости сечения, определяют по формуле:
Аг={[(Fг-Cг)·Dг-Lг·(Hг-Cг)]/(Hг-Cг)}·sin[arctg(Hг-Cг)/Dг], где:
Сг - координата наиболее приближенной к вертикальной плоскости отсчета точки поверхности в горизонтальной плоскости, проходящей через измеряемую начальную и конечную точки, мм;
Dг - расстояние между проекциями начальной и конечной точек в вертикальной плоскости отсчета, мм;
Нг - координата конечной точки поверхности, наиболее удаленной в вертикальной плоскости отсчета от начальной точки поверхности в горизонтальной плоскости, проходящей через измеряемые начальную и конечную точки, мм;
Fг - расстояние от измеряемой точки до вертикальной плоскости отсчета в горизонтальной плоскости, мм;
Lг - расстояние от измеряемой точки до начальной точки в вертикальной плоскости отсчета, мм.
Сравнение заявляемого способа определения координат точек поверхности в трехмерной системе координат с прототипом позволило установить, что в предлагаемом способе измерительная плоскость формируется источником лазерного излучения, что снимает ограничения, связанные с длиной жесткой стальной линейки (поверочной линейки) или струны, и исключает ограничения, связанные с прогибом струны.
Устройство автоматического горизонтирования лазерного луча построителя плоскостей снижает требования к точности взаимного расположения построителя плоскостей и измеряемой (контролируемой) поверхности металлопродукции.
Применяемый лазерный построитель плоскостей формирует не линию, как в прототипе, а сразу плоскость, что позволяет выполнять измерения в любом сечении измеряемой (контролируемой) поверхности, а не в одном, определенном направлением струны или жесткой стальной линейки (поверочной линейки).
Использование в качестве отсчетного устройства стандартизованных универсальных средств измерения (измерительной линейки, штангенрейсмаса и т.п.) упрощает подготовку и выполнение измерений.
Изобретение поясняется рисунками, где: на фиг.1 показан вариант применения способа для определения координаты в вертикальной плоскости сечения любой точки поверхности; на фиг.2 показан вариант применения способа для определения координаты в горизонтальной плоскости сечения любой точки поверхности.
Способ осуществляют следующим образом.
Определяют размеры Dв или Dг поверхности А, на которых будут выполнять измерения геометрических параметров поверхности А.
Определяют размеры Св, Нв или Сг, Нг от начальной Д и конечной Е точек до плоскости В отсчета.
Построитель 1 плоскостей устанавливают непосредственно на измеряемую поверхность А или предварительно выполненную контрольную площадку Б.
Лазерным лучом построителя 1 плоскостей формируют горизонтальную или вертикальную плоскости В отсчета.
Затем, последовательно устанавливая в необходимые точки средство 2 измерения, например измерительную линейку или штангенрейсмас, измеряют размеры Fв, Lв или Fг, Lг до точек поверхности А относительно плоскости отсчета В.
После выполнения измерений определяют геометрические параметры Ав или Аг элементов поверхности А относительно плоскости Г, проходящей через измеряемые начальную Д и конечную Е точки измерений.
Способ определения координат точек поверхности в трехмерной системе координат для измерения геометрических параметров металлопродукции с использованием стандартизованных средств измерений, например измерительной линейки или штангенрейсмаса, при котором определяют координаты точек поверхности в трехмерной системе координат относительно плоскости отсчета, отличающийся тем, что в качестве плоскости отсчета используют горизонтальную или вертикальную плоскости, каждая из которых построена лазерным лучом построителя плоскостей с устройством автоматического горизонтирования лазерного луча, причем построитель плоскостей устанавливают непосредственно на измеряемую или любую другую поверхность, угол наклона которой по отношению к истинному горизонту не превышает угол наклона устройства автоматического горизонтирования лазерного луча построителя плоскостей, при этом каждую координату А в вертикальной плоскости сечения любой точки поверхности относительно плоскости, проходящей через измеряемые начальную и конечную точки и перпендикулярной к вертикальной плоскости сечения, определяют по формуле:А={[(F-C)·D-L·(H-C)]/(H-C)}·sin[arctg(H-C)/D], где:С - координата наиболее приближенной к горизонтальной плоскости отсчета точки поверхности в вертикальной плоскости, проходящей через измеряемые начальную и конечные точки, мм;D - расстояние между проекциями начальной и конечной точек в горизонтальной плоскости отсчета, мм;F - расстояние от измеряемой точки до горизонтальной плоскости отсчета в вертикальной плоскости, мм;Н - координата конечной точки поверхности, наиболее удаленной в горизонтальной плоскости отсчета от начальной точки поверхности в вертикальной плоскости, проходящей через измеряемую конечную точку, мм;L - расстояние от измеряемой точки до начальной точки в горизонтальной плоскости отсчета, мм,а каждую координату А в горизонтальной плоскости сечения любой точки поверхности относительно плоскости, проходящей через измеряемые начальную и конечную точки и перпендикулярной к горизонтальной плоскости сечения, определяют по формуле:А={[(F-C)·D-L·(H-C)]/(H-C)}·sin[arctg(H-C)/D], где:С - координата наиболее приближенной к вертикальной плоскости отсчета точки поверхности в горизонтальной плоскости, проходящей через измеряемую начальную и конечную точки, мм;D - расстояние между проекциями начальной и конечной точек в вертикальной плоскости отсчета, мм;Н - координата конечной точки поверхности, наиболее удаленной в вертикальной плоскости отсчета от начальной точки поверхности в горизонтальной плоскости, проходящей через измеряемые начальную и конечную точки, мм;F - расстояние от измеряемой точки до вертикальной плоскости отсчета в горизонтальной плоскости, мм;L - расстояние от измеряемой точки до начальной точки в вертикальной плоскости отсчета, мм.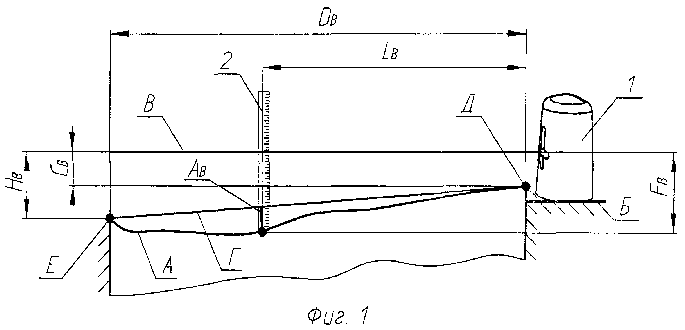
Бронированная машина
Способ изготовления беговой дорожки в погоне с загрузочным окном для тел качения опорно-поворотного устройства башни танка
Узел фланцевого соединения
Шасси бронированной машины
Устройство для крепления вращающейся части боевой машины к неподвижной
Привод вентилятора системы охлаждения транспортного средства (варианты)
Ударозащитный амортизатор
Устройство для самовытаскивания транспортного средства
Гидравлическая система бронированной ремонтно-эвакуационной машины
Броневая защита
Механизм перезарядки автоматического гранатомета
Устройство для крепления вращающейся части боевой машины к неподвижной
Защита от возгорания и взрыва боекомплекта в установленном на днище танка вращающемся транспортёре автомата заряжания
Унифицированный боевой модуль танка

