Результат интеллектуальной деятельности: АДАПТИВНОЕ РУЛЕВОЕ УПРАВЛЕНИЕ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Настоящее изобретение относится к адаптивной системе рулевого управления для транспортного средства.
Системы рулевого управления с усилителем были известны долгое время, в них крутящий момент, который водитель прикладывает к рулевому колесу, усиливается и передается к управляемым колесам, как правило, передним колесам транспортного средства, посредством исполнительного механизма, например, гидравлического цилиндра, электромотора или т.п. Хотя эти системы значительно снижают напряжение водителя при рулении, они все еще недостаточно удовлетворительны. При езде с высокой скоростью, например, по автомагистрали, водитель обычно использует только небольшие повороты рулевого колеса и имеет склонность к беспокойству, если он почти не ощущает обратного крутящего момента от рулевого колеса. Это накладывает верхнее ограничение на усиление крутящего момента в системе рулевого управления с усилителем, которое вызывает существенный обратный крутящий момент при маневрировании с низкой скоростью, где зачастую требуются большие углы рулевого управления. Совсем недавно были внедрены адаптивные системы рулевого управления с усилителем, в которых эта проблема решена посредством использования различных усилений крутящего момента при высоких и низких скоростях.
Однако, возникла новая проблема от таких адаптивных систем рулевого управления с усилителем, которая может быть чрезвычайно раздражающей для водителя: если транспортное средство внезапно тормозит при движении в повороте, и его скорость падает ниже порога переключения между разными коэффициентами усиления крутящего момента, обратный крутящий момент, ощущаемый водителем, внезапно уменьшается, передавая ему ощущение того, что транспортное средство потеряло сцепление с поверхностью. Так как внезапное торможение в большинстве случаев происходит в критических ситуациях, когда внимание водителя поглощено маневрами, необходимыми, чтобы избежать аварии, существует риск того, что он среагирует неадекватно при изменении обратного крутящего момента.
AFS (активное рулевое управление передними колесами) является технологией, которая позволяет изменять передаточное число системы рулевого управления в зависимости от скорости транспортного средства. Цель AFS аналогична целям адаптивных систем рулевого управления с усилителем, упомянутых выше: снизить напряжение водителя при рулении при маневрах в поворотах с малым радиусом на низкой скорости, в то же время сохранить хорошо ощутимый обратный крутящий момент при высокой скорости. Здесь, проблемы, вызванные переключением между разными передаточными числами, могут быть более серьезными, чем с адаптивным рулевым управлением с усилителем, так как угол между дорогой и передним колесом, связанный с данным углом поворота рулевого колеса, зависит от передаточного отношения.
Целью настоящего изобретения является создание адаптивной системы рулевого управления, которая не допускает любых операций управления, которые могут неожиданно подвергнуть риску водителя.
Эта цель достигается адаптивной системой рулевого управления для транспортного средства, содержащей датчик для определения текущего значения рабочего параметра рулевого колеса, исполнительный механизм для поворота управляемых колес и контроллер для выбора, согласно скорости транспортного средства, многомерной регулировочной характеристики, присваивающей определенному текущему значению рабочего параметра заданное значение рабочего параметра для исполнительного механизма, и для выдачи заданного сигнала исполнительному механизму, при этом контроллер выполнен с возможностью определения, находится ли транспортное средство в режиме движения, требующем повышенного уровня внимания от водителя, или нет, и препятствования переключению многомерной регулировочной характеристики, когда транспортное средство находится в режиме, требующем повышенного внимания.
Рабочим параметром может быть угол поворота рулевого колеса и управляемых колес или крутящий момент, приложенный к рулевому колесу и к управляемым колесам.
В принципе, многомерные регулировочные характеристики могут быть вполне произвольными монотонными непрерывными функциями, линейными или нелинейными. Предпочтительно, линейный член многомерной регулировочной характеристики, выбранной при низкой скорости транспортного средства, больше, чем линейный член многомерной регулировочной характеристики, выбранной при высокой скорости транспортного средства.
Различные критерии могут быть использованы для принятия решения о том, требует ли текущий режим движения транспортного средства повышенного уровня внимания от водителя или нет. Первым подходящим критерием является то, превышает ли поперечное ускорение заданное пороговое значение или нет. Предпочтительно, поперечное ускорение может быть непосредственно измерено датчиком поперечного ускорения, соединенным с контроллером. В качестве альтернативы, оно может быть оценено контроллером на основании данных об угле поворота рулевого колеса (или, эквивалентно, данными об угле поворота дороги, из которых может быть получен радиус изгиба пути транспортного средства) и продольной скорости транспортного средства.
Другим подходящим критерием является угловая скорость рыскания транспортного средства, которая может также быть получена от отдельного датчика, соединенного с контроллером.
В частности, предпочтительным критерием является скорость бокового скольжения транспортного средства. В то время как высокая угловая скорость рыскания или высокое поперечное ускорение могут быть результатом исключительно преднамеренного управления, мер водителя и могут хорошо предвидеться им, вероятно, что высокая скорость бокового скольжения не предвидится и будет провоцировать корректирующие меры от водителя, что поглощает целиком его внимание.
Для оценки скорости бокового скольжения контроллер будет предпочтительно использовать угловую скорость рыскания, измеренную вышеупомянутым датчиком угловой скорости рыскания, и поперечное ускорение, измеренное упомянутым датчиком поперечного ускорения.
Другим полезным критерием для принятия решения о том, находится ли транспортное средство в требующем повышенного внимания режиме, является продольное ускорение. Его высокое значение, будь оно положительным или отрицательным, является ясным указанием того, что водитель полностью внимателен.
Дополнительными важными критериями являются производные по времени от угла поворота рулевого колеса или угловой скорости рыскания. Точно также как и при значительном продольном ускорении, высокая производная по времени от угла поворота рулевого колеса может быть результатом только преднамеренного рулевого управления водителем. Чрезмерная производная по времени от угловой скорости рыскания может быть результатом рулевого управления водителем, или она может указывать ситуацию, в которой контроль над транспортным средством, по меньшей мере, частично утерян. В этой ситуации все более важным является то, что неожиданное переключение между многомерными регулировочными характеристиками системы рулевого управления не должно произойти.
Цель дополнительно достигается способом рулевого управления для транспортного средства, включающим повторяющиеся этапы, на которых:
a) определяют текущее значение рабочего параметра рулевого колеса,
b) выбирают многомерную регулировочную характеристику, присваивающую определенному текущему значению рабочего параметра заданное значение рабочего параметра,
c) выдают заданный сигнал исполнительному механизму управляемых колес, при этом
d) определяют, находится ли транспортное средство в режиме движения, требующем повышенного уровня внимания от водителя, или нет,
e) выбирают многомерную регулировочную характеристику на основании скорости транспортного средства, если определено, что транспортное средство не находится в режиме, требующем повышенного внимания, и
f) повторно выбирают многомерную регулировочную характеристику, выбранную в предыдущей итерации этапа e), если определено, что транспортное средство находится в режиме, требующем повышенного внимания.
Изобретение может быть дополнительно реализовано посредством программного продукта для процессора данных, содержащего носитель информации, на котором в машиночитаемой форме записаны программные инструкции, чтобы позволить процессору данных сформировать контроллер адаптивной системы рулевого управления, описанной выше, или выполнить вышеопределенный способ.
Дополнительные признаки и преимущества изобретения станут очевидны из последующего описания вариантов его осуществления, со ссылками на прилагаемые чертежи, на которых:
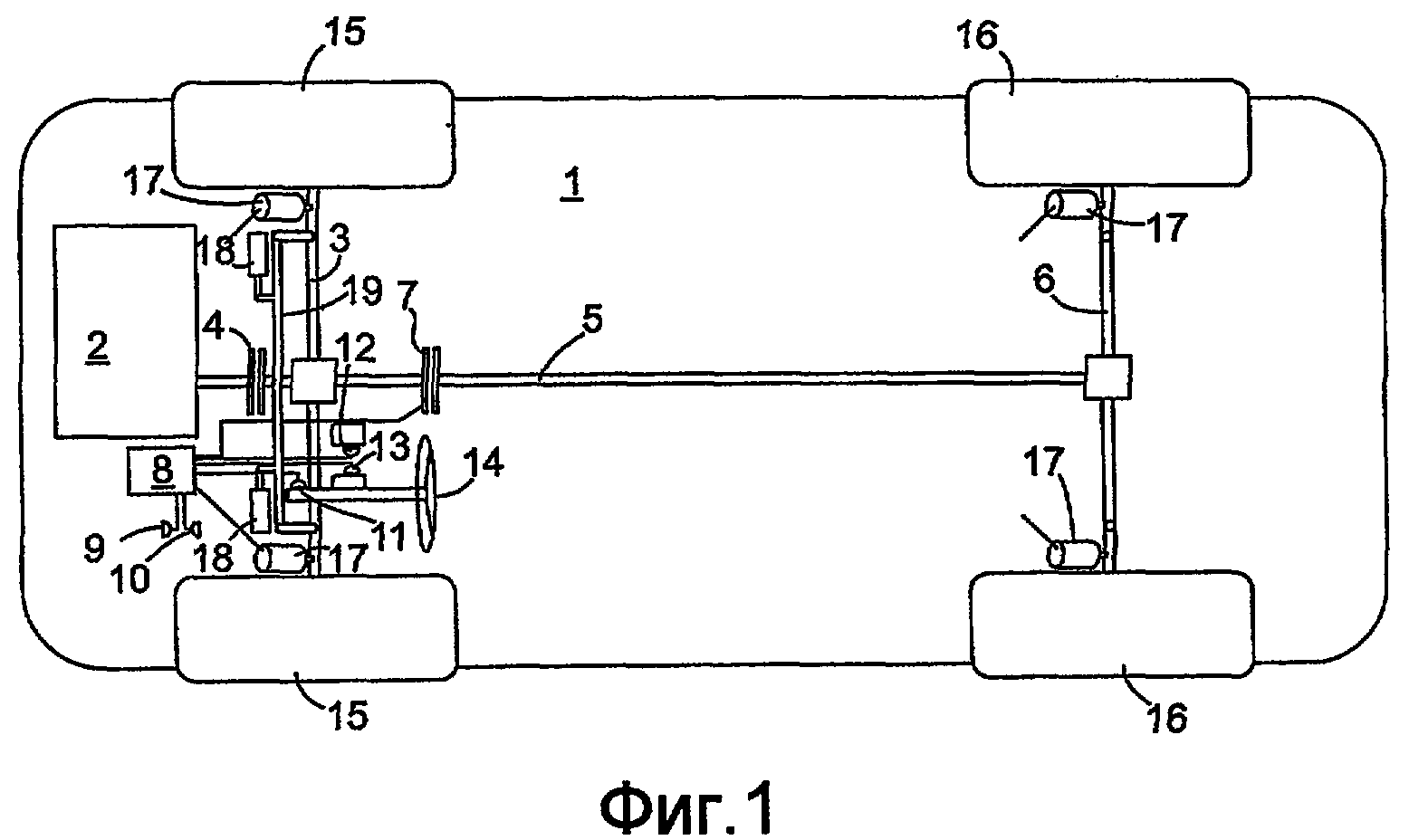
фиг.1 представляет собой блок-схему транспортного средства, оборудованного адаптивным управлением подвеской и адаптивной системой рулевого управления согласно изобретению;
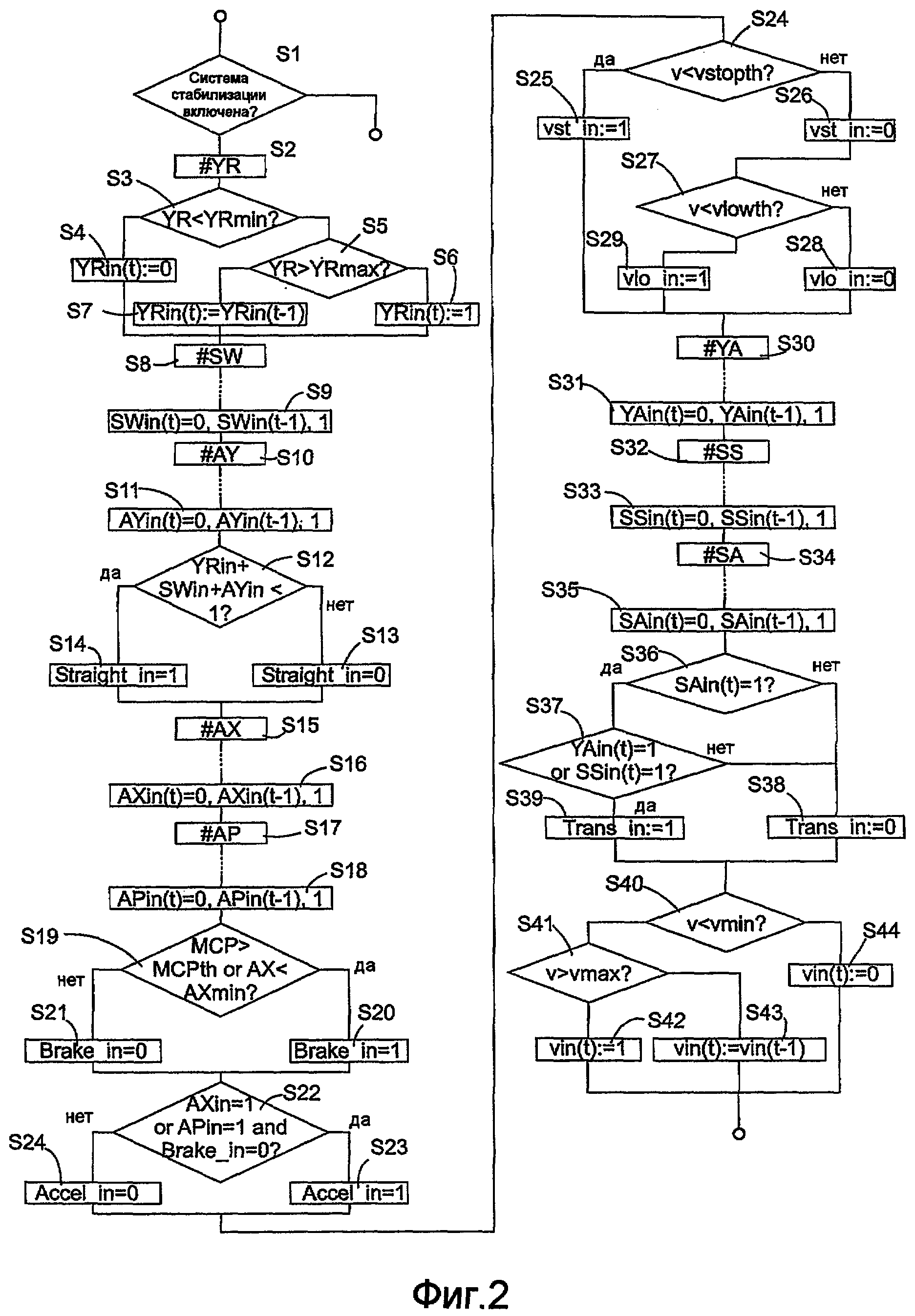
фиг.2 представляет собой блок-схему первой части процесса управления, реализуемого контроллером транспортного средства на фиг.1; и
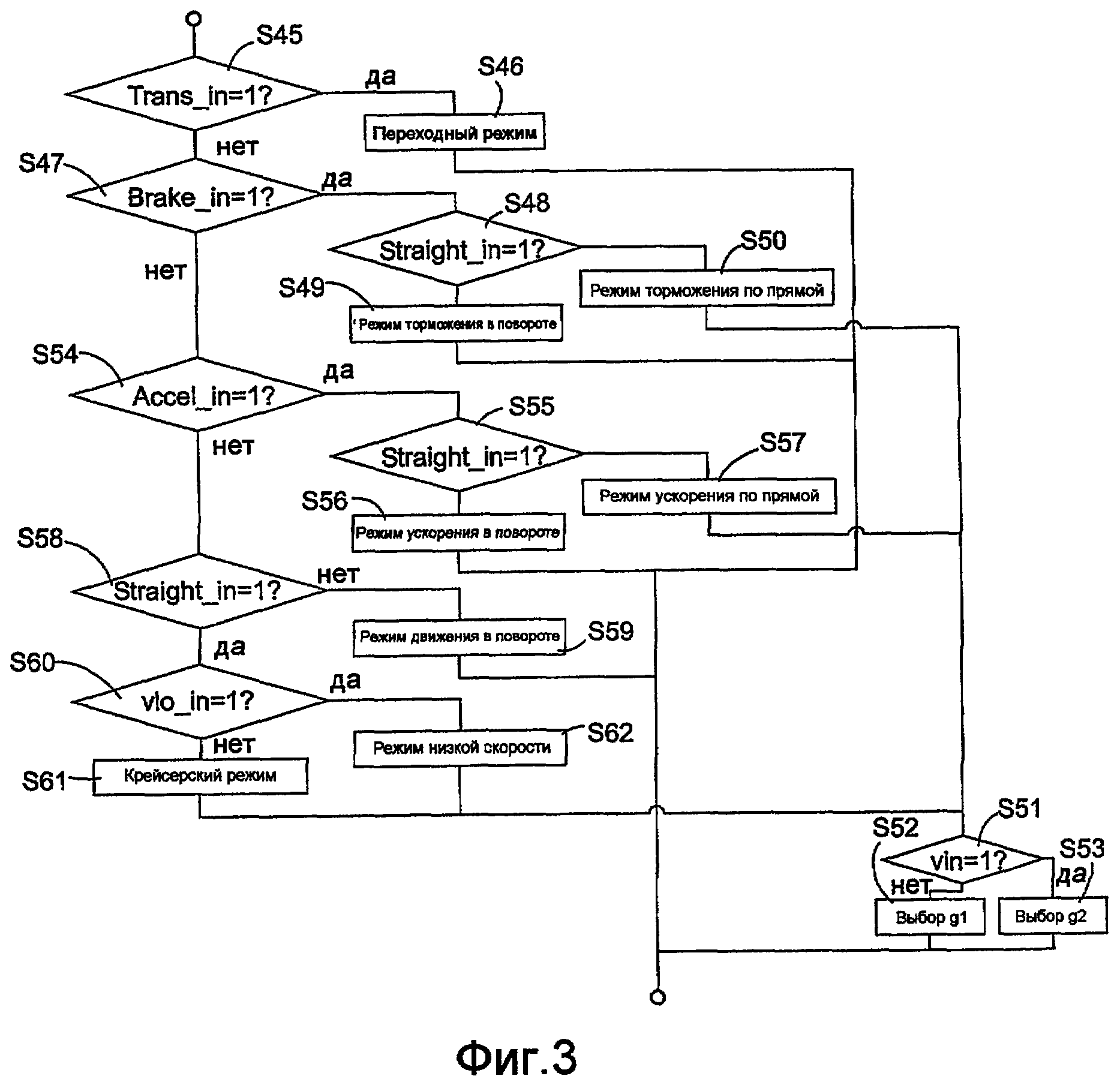
фиг.3 представляет собой блок-схему второй части процесса управления.
Фиг.1 является схематичной блок-схемой транспортного средства, воплощающего настоящее изобретение. Транспортное средство имеет двигатель 2 внутреннего сгорания, который приводит в действие колеса 15 передней оси 3 через первое сцепление 4. На ведущем валу 5 между передней осью 3 и задней осью 6 предусмотрено второе сцепление 7. Второе сцепление 7 находится под управлением схемы 8 микропроцессорного контролера. Если второе сцепление 7 разомкнуто, транспортное средство приводится только передними колесами 15; если оно сомкнуто, оно дополнительно приводится задними колесами 16. Соотношение между крутящим моментом, приложенным к передним колесам 15, и моментом, приложенным к задним колесам 16, может изменяться схемой 8 контроллера.
Амортизаторы 17 предусмотрены рядом с колесами 15, 16 на передней и задней осях 3, 6. Жесткость амортизаторов 17 изменяется под управлением схемы 8 контроллера.
Система рулевого управления с усилителем транспортного средства 1 является системой рулевого управления типа «управление по проводам», содержащей датчик 11 угла поворота рулевого колеса, расположенный рядом с осью рулевого колеса 14 и соединенный с контроллером 8, и гидравлические приводы 19 для перемещения рулевой рейки 18, в которые, под управлением контроллера 8, подается рабочая жидкость под давлением. Контроллер 8 хранит две многомерных регулировочных характеристики LA=g1(SW), LA=g2(SW) для присваивания угла LA колес относительно дороги определенному углу SW поворота рулевого колеса. Многомерная регулировочная характеристика g1 главным образом используется при низких скоростях, как будет описано более подробно ниже, тогда как g2 главным образом используется при высоких скоростях. Для любого угла поворота рулевого колеса выполняется g1(SW)≥g2(SW). Многомерные регулировочные характеристики могут быть линейными функциями, или они могут быть расширяемыми в ряд Тейлора, линейный член которого больше для g1, чем для g2.
В качестве альтернативы, система рулевого управления с усилителем может содержать датчик крутящего момента для определения крутящего момента ST, приложенного к рулевому колесу 14 водителем, и контроллер 8 хранит две многомерных регулировочных характеристики, указывающих крутящий момент FT, выполненный приводами 19 для вращения передних колес 15, как функцию крутящего момента рулевого колеса, используя выбранную одну из двух многомерных регулировочных характеристик FT=g1(ST), FT=g2(ST), g1(ST)≥g2(ST). В этом случае может быть предусмотрено механическое соединение между рулевым колесом, например, посредством обычной шестерни на оси рулевого колеса 14, которая зацепляет рейку 18.
Схема 8 контроллера имеет еще и другие датчики, соединенные с ней, такие как датчик 9 ускорения для определения продольного и поперечного ускорения транспортного средства 1, датчик 10 угловой скорости рыскания или датчик 12 педали акселератора. Датчик 12 педали акселератора может быть заменен датчиком заслонки всасываемого воздуха, не показан, или сигналом расхода подачи топлива от электронной системы управления двигателем, не показана, так как положение заслонки или расход топлива обычно непосредственно управляются на основании положения педали акселератора.
Кроме того, предусмотрен датчик 13 тормоза. Этот датчик может определять положение педали тормоза, или он может быть датчиком давления для определения давления тормозной жидкости, которая используется для приведения в действие колесных тормозов, не показаны, на колесах 15, 16 образом, хорошо знакомым специалисту в данной области техники.
Работа схемы 8 контроллера будет объяснена со ссылкой на блок-схемы на фиг.2 и 3. Эти чертежи иллюстрируют части процесса управления, который выполняется повторяющимся образом схемой 8 контроллера в постоянных временных интервалах или запускается посредством существенного изменения параметра, относящегося к движению транспортного средства, пока транспортное средство движется. Первая часть процесса управления, показанная на фиг.2, относится к автоматической классификации режима движения транспортного средства 1. Вторая часть, показанная на фиг.3, относится к управляющим мерам, предпринятым в ответ на режим движения, определенный в первой части процесса. Одновременно с процессом на фиг.2 и 3 схема контроллера непрерывно управляет работой гидравлических приводов 19 на основании входных данных от датчика 11 угла поворота рулевого колеса (или, в качестве альтернативы, на основании входных данных от датчика крутящего момента рулевого колеса) с помощью выбранной в настоящий момент одной из многомерных регулировочных характеристик g1, g2.
На первом этапе S1 схема 8 контроллера проверяет, взаимодействует ли активно любая электронная система стабилизации, которая может присутствовать в транспортном средстве 1, такая как традиционная ABS- или ESP-система, с устройствами управления транспортным средством. Если это так, процесс на фиг.2 прекращается, чтобы избежать какого-либо нежелательного взаимодействия с электронной системой стабилизации, и будет начат или запущен опять в более поздний момент или как только система стабилизации становится неактивной.
Процесс на фиг.2 измеряет множество параметров, связанных с движением транспортного средства, и преобразует их в двоичные индексы. Способ, которым это делается, похож для многих параметров и будет объяснен здесь только один раз со ссылкой на угловую скорость YR рыскания от датчика 10 угловой скорости рыскания, понятно, что похожий процесс выполняется при неизменности всех факторов для других параметров, которые будут упомянуты ниже в этом описании.
На этапе S2 схема 8 контроллера принимает текущее измеренное значение угловой скорости YR рыскания от датчика 10 угловой скорости рыскания. На этапе S3 это значение YR сравнивается с предварительно определенным нижним пороговым значением YRmin. Если определяется, что YR ниже этого порогового значения, этап S4 устанавливает текущее значение индекса YRin(t) угловой скорости рыскания равным нулю. Если YR выше первого порогового значения, она сравнивается со вторым, более высоким пороговым значением YRmax на этапе S5. Если YR превышает это второе пороговое значение, индекс YRin(t) устанавливается в 1 на этапе S6. Если YR ниже второго порогового значения YRmax, индекс YRin(t) сохраняется в значении YRin(t-1), которое он принял в предыдущей итерации процесса (S7).
Похожим способом угол SW поворота рулевого колеса получается от датчика 11 угла поворота рулевого колеса на этапе S8, и на основании сравнения с двумя пороговыми значениями настоящее значение индекса SWin(t) рулевого колеса устанавливается в 0, в 1 или остается идентичным своему предыдущему значению SWin(t-1) на этапе S9.
Тем же способом поперечное ускорение AY считывается из датчика 9 ускорения, и индекс AYin(t) поперечного ускорения устанавливается согласно этому считыванию на этапе S11.
Этап S12 проверяет, равен ли любой из индексов YRin, SWin, AYin, определенных выше, 1, указывающей, что транспортное средство проходит по закруглению дороги. Если так, индекс Straight_in движения по прямой устанавливается в 0 (S13), если нет, он устанавливается в 1 (S14).
На этапе S15 текущее продольное ускорение AX получается от датчика 9 ускорения, и из этого извлекается индекс AXin(t) продольного управления, как описано выше для YR (S16). Тем же способом индекс APin(t), указывающий, нажата ли педаль акселератора достаточно, чтобы ускорить транспортное средство, определяется на этапах S17, S18. Индекс, имеющий то же значение, может в качестве альтернативы быть получен из положения заслонки всасываемого воздуха или также из расхода подачи топлива в двигатель.
Этап S19 проверяет, находится ли транспортное средство в режиме торможения или нет, посредством либо сравнения продольного ускорения AX из этапа S15 с пороговым значением Axmin, или посредством сравнения давления MCP тормозной жидкости с пороговым значением MCPth. Если одно из этих пороговых значений превышено, индекс Brake_in торможения устанавливается в 1 (S20), иначе в 0 (S21).
Если либо AXin=1, указывающий существенное ускорение транспортного средства, либо APin=1, указывающий предстоящее ускорение, и Brake_in=0, то индекс Accel_in ускорения устанавливается в 1 (S23), иначе в 0 (S24).
На основании сравнения скорости v транспортного средства с очень низким пороговым значением vstopth индекс vst_in остановки устанавливается в 1 (S25), указывая, что транспортное средство движется, или в 0 (S26), указывая, что оно остается практически неподвижным. Если определено, что транспортное средство движется, его скорость v сравнивается с другим пороговым значением vlowth, доходящим до нескольких километров в час. Если пороговое значение превышено, указывая, что транспортное средство движется в обычном транспортном потоке, индекс vlo_in устанавливается в 0 (S28). Если v ниже vlowth, вероятно, что транспортное средство выполняет трудный маневр, как, например, движение в гараж или из него, и vlo_in устанавливается в 1 (S29).
На этапе S30 вычисляется угловое ускорение YA рыскания, т.е. производная по времени от угловой скорости YR рыскания, измеренной на этапе S2, и индекс YAin(t) углового ускорения рыскания получается на основании сравнения с двумя пороговыми значениями на этапе S31. Этап S32 вычисляет скорость SS бокового скольжения транспортного средства как следующую
SS=AY-YR*v
на основании поперечного ускорения AY и угловой скорости YR рыскания, измеренных на этапах S10 и S2, соответственно. Тем же способом, что и для других параметров, упомянутых выше, связанный индекс SSin(t) получается на этапе S33 посредством сравнения с двумя пороговыми значениями. Индекс SSin равен 0, если нет существенного бокового скольжения, и он равен 1, если есть.
Этап S34 вычисляет производную SA по времени от угла SW поворота рулевого колеса. На этапе S35 индекс SAin(t) скорости поворота рулевого колеса устанавливается в 0, если нет существенного перемещения рулевого колеса, и в 1, если есть.
Если SAin(t) равен 0 на этапе S36, т.е. если рулевое колесо поворачивается медленно или вообще не поворачивается, предполагается, что транспортное средство не находится в переходном режиме. Это отражено индексом Trans_in перехода, устанавливаемым в 0 на этапе S37. Если SAin(t) равно 1, этап S38 дополнительно проверяет, равен ли 1, по меньшей мере, один из индексов YAin(t) или SSin(t). Если это условие удовлетворяется, предполагается, что транспортное средство должно быть в переходном режиме, т.е. Trans_in устанавливается в 1 на этапе S39.
Наконец, двоичный индекс vin(t) скорости получается из продольной скорости v транспортного средства на этапах S40-S44. Как и в случае большинства ранее обсужденных индексов, vin(t) получается посредством сравнения с двумя пороговыми значениями, vmax и vmin, чтобы обеспечить гистерезис.
Режим движения транспортного средства, таким образом, был оценен, и контроллер переходит ко второй части процесса, показанной на фиг.3.
Если индекс Trans_in переходного режима определен равным 1 на этапе S45, жесткость амортизаторов 17 устанавливается в высокое значение, связанное с переходным режимом, на этапе S46. Так как переходный режим соответствует ситуации, где водитель полностью занят рулением, и всего, что может раздражать его, нужно избегать, процесс заканчивается непосредственно после этапа S46 без переключения между многомерными регулировочными характеристиками g1, g2, в связи с чем многомерная регулировочная характеристика g1 или g2, которая была выбрана в предыдущей итерации процесса, повторно выбирается эффективным образом.
Если определено, что транспортное средство не находится в переходном режиме, индекс Brake_in торможения проверяется на этапе S47. Если он равен 1, индекс Straight_in движения по прямой проверяется на этапе S48. Если он равен 1, делается заключение о том, что транспортное средство находится в режиме торможения при движении в повороте, т.е. оно тормозит при движении по кривой, на этапе S49, и значение жесткости, связанное с этим режимом, устанавливается в амортизаторах 17. В этом случае переключение между многомерными регулировочными характеристиками g1, g2 недоступно, и процесс также заканчивается.
Если Straight_in=0, транспортное средство должно быть в режиме торможения по прямой, и амортизаторы 17 устанавливаются соответствующим образом на этапе S50. В этом случае переключение между многомерными регулировочными характеристиками g1, g2 не имеет немедленного эффекта на характер поведения транспортного средства и может быть выполнено, если необходимо. Следовательно, способ переходит к этапу S51, где оценивается индекс vin(t) скорости. Если vin(t)=0, т.е. если транспортное средство находится в диапазоне низких скоростей, то g1 выбирается или повторно выбирается в качестве многомерной регулировочной характеристики, которая используется для управления исполнительным механизмом 18; если vin=1, указывая высокую скорость, то выбирается или повторно выбирается g2.
Если определено, что транспортное средство не находится в режиме торможения на этапе S47, способ проверяет режим ускорения на этапе S54. Если Accel_in=1, то индекс Straight_in движения по прямой проверяется на этапе S55, и согласно его значению определяется, что транспортное средство находится в режиме ускорения при движении в повороте (S56) или в режиме ускорения по прямой (S57). В режиме ускорения при движении в повороте переключение многомерных регулировочных характеристик g1, g2 является неуместным, и процесс заканчивается; в режиме ускорения по прямой процесс ответвляется к этапу S51, описанному выше.
Если транспортное средство не ускоряется, также Straight_in опять проверяется на этапе S58, и, если он равен 1, соответствующая жесткость амортизаторов 17 для режима движения в повороте устанавливается на этапе S59. Переключение многомерных регулировочных характеристик не происходит.
Если транспортное средство не движется в повороте, индекс vlo_in скорости ссылается на этап S60, чтобы решить, находится ли транспортное средство в крейсерском режиме S61 или в режиме низкой скорости S62. В обоих случаях может быть обеспечено переключение многомерной регулировочной характеристики, таким образом, процесс ответвляется к этапу S51.
В таблице 1 ниже приведены примеры многомерных регулировочных характеристик, посредством которых значения жесткости амортизаторов могут быть присвоены различным режимам движения транспортного средства, определенным выше. Их не следует путать с многомерными регулировочными характеристиками g1, g2 рулевого управления, упомянутыми выше. Многомерные регулировочные характеристики в таблице 1 сопоставляют дискретные режимы со значениями жесткости, тогда как g1, g2 сопоставляют непрерывные значения угла SW поворота рулевого колеса с углами LA относительно дороги передних колес 15 или непрерывные значения крутящего момента ST рулевого колеса с крутящим моментом привода 18. Числа в таблице 1 не являются количественными, предполагается, что четыре разных значения жесткости, называемые как «1»-«4», могут быть установлены в амортизаторах, и что жесткость увеличивается от «1» до «4». Многомерная регулировочная характеристика A является комфортно-ориентированной; в крейсерском режиме жесткость устанавливается в «1», т.е. очень мягкой. Низкая промежуточная жесткость «2» определяется для режимов низкой скорости и ускорения по прямой, тогда как все режимы движения в повороте, режимы торможения по прямой и переходные режимы имеют жесткость «3». Многомерная регулировочная характеристика B более подходит для спортивного стиля вождения, так как амортизаторы, как правило, установлены в более высокую жесткость, чем согласно многомерной регулировочной характеристике A. Опять же, самая низкая жесткость, «2», выбирается в крейсерском режиме, а наивысшая, «4», в переходном режиме, режимах движения в повороте и при ускоряющемся движении в повороте.
|
Если схема 8 контроллера имеет пользовательский интерфейс, где водитель может указать, предпочитает ли он комфортабельный или спортивный стиль вождения, разные многомерные регулировочные характеристики могут использоваться для связывания установок жесткости с различными режимами движения транспортного средства. Если водитель выбирает комфортабельный операционный режим, реализованный многомерной регулировочной характеристикой C1, амортизаторы устанавливаются мягкими в любом случае, т.е. жесткость «1» приспособлена для крейсерского режима и режима ускорения по прямой, тогда как всем другим режимам назначена жесткость «2». Если водитель хочет промежуточную установку, может быть использована многомерная регулировочная характеристиками C2, которая выбирает самую мягкую установку «1» для амортизаторов только в крейсерском режиме, а промежуточное значение «2» - во всех других. Амортизаторы управляются, чтобы быть в целом жестче, посредством использования многомерной регулировочной характеристики C3, которая устанавливает жесткость «2» для крейсерского режима, и «3» - для всех других.
Процесс, описанный относительно фиг.2 и 3, позволяет проводить различие между каждым из различных режимов, приведенных в таблице 1. В зависимости от того, как различные значения жесткости присвоены различным режимам, и от того, необходимы ли они для принятия решения о том, позволено или нет переключение между многомерными регулировочными характеристиками g1, g2 рулевого управления, могут быть пары режимов, между которыми нет необходимости проводить различие. В этом случае специалист в данной области техники легко узнает, какие из этапов способа на фиг.2 и 3 могут быть отброшены.
Согласно предпочтительному варианту осуществления контроллер 8 использует индексы, полученные в процессе на фиг.2 и 3 также для управления сцеплением 7. В то время как сцепление 7 разомкнуто в крейсерском режиме, оно может быть замкнуто в режиме движения в повороте, чтобы уменьшить чрезмерную или недостаточную поворачиваемость транспортного средства. Степень замыкания и, следовательно, коэффициент распределения крутящего момента двигателя на передние и задние колеса 15, 16 могут быть разными для режимов движения в повороте, ускорения при движении в повороте и торможения при движении в повороте. Кроме того, сцепление 7 может быть замкнуто в режиме ускорения по прямой, чтобы предотвратить буксование шин в случае высокого ускорения.
Автомобиль с выпуклой вперед передней стенкой
Автомобиль с поднимающимся капотом
Замок капота автомобиля
Устройство масляной ванны
Узел откидной крышки резервуара
Система подрамника для объединения заданного модуля крыши в кузове автомобиля
Усиливающий элемент для нижней зоны переднего бампера, а также передний бампер для автомобиля, имеющий такой усиливающий элемент
Усиливающий элемент для нижней зоны переднего бампера, а также передний бампер для автомобиля, оснащенный таким усиливающим элементом
Коробка передач, переключаемая под нагрузкой, и способ ее переключения
Способ эксплуатации системы дизельного двигателя и управляющее устройство
Устройство и способ защиты компрессора и охладителя воздуха турбонаддува в двигателе внутреннего сгорания, двигатель внутреннего сгорания и устройство управления
Способ диагностирования каталитического устройства системы дополнительной обработки выхлопных газов двигателя
Способ управления процессом переключения автоматической коробки передач
Система зарядки аккумуляторной батареи для гибридных транспортных средств
Способ и контроллер для управления давлением в системе подачи топлива, а также машиночитаемый носитель
Способ управления устройством сцепления и электронно-управляемое фрикционное сцепление

