Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ
Вид РИД
Изобретение
Способ определения глубин акватории гидролокатором бокового обзора и гидролокатор бокового обзора для его осуществления
Изобретение относится к области гидрографии, в частности к способам и техническим средствам определения глубин акватории фазовым гидролокатором бокового обзора, и может быть использовано для выполнения съемки рельефа дна акватории.
Известен способ определения глубин акватории фазовым гидролокатором бокового обзора (Судостроение за рубежом, Издание ЦНИИ Румб, 1987, с 76-80. [1]), включающий излучение гидроакустического сигнала в сторону дна и прием отраженных сигналов в двух точках, расположенных на расстоянии d по вертикали, измерение времени задержки tз отраженных сигналов и их фазового сдвига φ в этих точках, определение направления (а) приема отраженных сигналов по формуле

где f - частота гидроакустического сигнала;
С - скорость распространения звука в воде.
Измерение прибором угла β бортовой качки носителя антенн и вычисление глубин (Z) акватории производится по формуле
где  .
.
Однако данный способ имеет недостаточно высокую точность.
Это объясняется тем, что при его использовании имеет место существенная погрешность (mγ) определения направления (γ) прихода отраженных сигналов по измеренным значениям их фазового сдвига φ в точках приема.
Значение mγ, исходя из формулы (1), можно вычислить по формуле  ,
,
где mφ - погрешность измерения φ.
Так как достоверное определение направления у (без разрешения неоднозначности) возможно только лишь в случае малого разноса d антенн, не превышающего двух длин (λ) волн, то возможный диапазон изменения фазового сдвига φ при d=λ составит 0-2 π.
Погрешность mγ, как видно из формулы (3), изменяется нелинейно и при φ=0 mγ=-mφ, а при φ=2π достигает максимума и может составить 2 mφ.
Данное обстоятельство обуславливает существенную погрешность (mz) определения глубины акватории z при использовании известного способа.
Значение mz, исходя из формулы (2), можно вычислить по формуле  где
где  Например, когда С=1500 м/с, tз=0,7 с, γ=30°, cos φ=87, mγ=2, mφ=2·0,0017 (mφ у современных фазовых гидролокаторов бокового обзора не превышает 1°). Тогда mz составит 13 м или около 4% от величины. Допустимая погрешность определения глубины акватории в соответствии с нормативными документами по съемке рельефа дна составляет 1% от глубины Z.
Например, когда С=1500 м/с, tз=0,7 с, γ=30°, cos φ=87, mγ=2, mφ=2·0,0017 (mφ у современных фазовых гидролокаторов бокового обзора не превышает 1°). Тогда mz составит 13 м или около 4% от величины. Допустимая погрешность определения глубины акватории в соответствии с нормативными документами по съемке рельефа дна составляет 1% от глубины Z.
Известен также способ определения глубин акватории фазовым гидролокатором бокового обзора (Stubbs A.K: Telesounding a merhod of wide swathe a depth measurement International Hydrographic Review 1974, 51 Ns 1, p.p.23-59 [2]), включающий одновременное излучение в сторону дна основного и вспомогательного гидроакустических сигналов, отличающихся по частоте на малую величину, и прием отраженных основных и вспомогательных сигналов в двух точках, расположенных по вертикали на заданном расстоянии d, измерение времени tc задержки прихода синфазных основных и вспомогательных сигналов с помощью двух многоканальных двухчастотных приемоизмерительных блоков, измерение прибором угла бортовой качки носителя антенн, определение по полученным данным направлений прихода синфазных основных сигналов и искомых глубин акватории расчетным путем.
Известен также фазовый гидролокатор бокового обзора, который содержит первую и вторую двухчастотные антенны, расположенные по вертикали на заданном расстоянии (d), передающий блок, первый и второй двухчастотные многоканальные приемоизмерительные блоки, блок управления, вычислитель и регистратор, при этом выходы первой и второй двухчастотных антенн подключены соответственно к входам первого и второго двухчастотных многоканальных приемоизмерительных блоков, выход передающего блока соединен с излучающей антенной, выходы первого и второго двухчастотных многоканальных приемоизмерительных блоков подключены к выходу вычислителя, выход последнего подключен к регистратору.
Недостаток способа и устройства (фазового гидролокатора бокового обзора) заключается в том, что они сложны в использовании.
Это объясняется тем, что для повышения точности определения глубин акватории в данных технических решениях осуществляют прием отраженных гидроакустических сигналов в двух точках, расположенных по вертикали на большом по сравнению с аналогом расстоянии (d=n λ) в несколько длин волн, и измеряют время задержки сигналов, то есть сигналов, в которых фазовый сдвиг отсутствует или кратен целому числу 2π.
Выполнение данного действия обеспечивает высокую точность определения глубин акватории, так как при фазовом сдвиге φ=0, как видно из формулы (3), погрешность mγ будет минимальной и равной mφ.
Однако в этом случае возникает необходимость в решении сложной задачи - исключении многозначности в определении направлений прихода синфазных сигналов. Для решения этой задачи при использовании первого рассматриваемого известного способа необходимо, кроме основных, выполнить дополнительно следующие сложные действия: принимать в третьей точке, расположенной по вертикали на вспомогательной базе на заданном расстоянии от общей точки, отраженные гидроакустические сигналы; измерять в третьей и основных точках время задержки прихода синфазных сигналов.
Для осуществления данных действий необходимо фазовый гидролокатор бокового обзора снабдить приемной антенной и приемоизмерительным блоком, то есть существенно усложнить структурную схему и повысить массогабаритные характеристики фазового гидролокатора бокового обзора.
При использовании известного способа для решения этой же задачи необходимо выполнять, кроме основных, следующие дополнительные действия:
- излучать вспомогательный гидроакустический сигнал на заданной частоте, отличающейся от основной частоты;
- принимать отраженные вспомогательные сигналы (синфазные) в тех же случаях, где принимается основной синфазный сигнал;
- измерять время задержки прихода вспомогательных синфазных сигналов.
Для осуществления данных действий необходимо использовать вспомогательный фазовый гидролокатор бокового обзора. То есть для осуществления данного способа необходимо использовать практически два фазовых гидролокатора бокового обзора, работающих на разных частотах, что и обуславливает значительную сложность в использовании известных способов и устройств.
Известен также способ определения глубин акватории фазовым гидролокатором бокового обзора и фазовый гидролокатор бокового обзора для его осуществления (патент RU №1829019 А1, 23.07.1993 [3], в котором технический результат заключается в упрощении процесса определения глубины акватории фазовым гидролокатором бокового обзора.
При этом технический результат достигается тем, что в способе определения глубин акватории фазовым гидролокатором бокового обзора, включающем излучение гидроакустического сигнала в сторону дна и прием отраженных сигналов в двух точках, расположенных по вертикали на заданном расстоянии, измерение времени задержки прихода синфазных сигналов, угла бортовой качки носителя антенн и определение по полученным данным направлений θп прихода синфазных сигналов и искомых глубин акватории расчетным путем, измерение времени tз задержки прихода отраженного гидроакустического сигнала по вертикали, отделяют временные задержки (tp) прихода синфазных сигналов в случае их отражения от ровной поверхности дна по каждому расчетному (θр) направлению по формуле
где n=1,2,3…N;
N=d/λ - количество расчетных направлений θр;
ξ - генеральный угол наклона дна в полосе зондирования;
Затем определяют сходимость вычисленных tn и измеренных tp значений по критерию  вычисленному по формуле
вычисленному по формуле
где М - количество измеренных значений tc для каждого количества М расчетных направлений θр.
При этом последовательно изменяют начальное значение n от 1 до К=N-М, а за искомые направления прихода синфазных сигналов принимают М расчетных направлений θр, характеризующихся минимальным значением δ.
Известный гидролокатор бокового обзора для определения глубин акватории [3] содержит функционально соединенную первую и вторую антенны, одна из которых приемоизлучающая, передающий блок, первый и второй приемоизмерительные блоки, блок управления, блок определения времени задержки прихода отраженных от ровной поверхности дна синфазных сигналов по каждому расчетному направлению, вычислитель и регистратор, в котором выходы первой и второй антенн подключены соответственно к входам первого и второго приемоизмерительных блоков, выход передающего блока соединен с приемоизлучающей антенной, выходы первого и второго приемоизмерительных блоков подключены к входам вычислителя, выход последнего подключен к регистратору, а блок управления соединен с первым и вторым приемоизмерительными блоками, передающим блоком, вычислителем и регистратором, вход блока определения времени задержки прихода отраженных от ровной поверхности дна синфазных сигналов по каждому расчетному направлению, вход которого соединен с выходом блока управления, а выход подключен к входу вычислителя. Существенным недостатком данного устройства является то, что для достижения технического результата, заявленного в способе, блок управления и вычислитель должны быть выполнены в виде ЭВМ типа СМ-4 ввиду большего количества расчетных и вычислительных операций, что ограничивает его применение только при использовании для промерных работ крупнотоннажных носителей (судов), снабженных мощной ЭВМ.
Однако несмотря на достижение по упрощению известного способа он отягощен существенными расчетами и трудоемкими вычислительными операции.
Кроме того, выделение отраженных сигналов от ровной поверхности дна и их математическая обработка связаны с рядом допущений, что существенно снижает достоверность получения конечных результатов измерений.
Так, например, проведенные исследования искажения спектров линейных частотно модулированных (ЛЧМ) сигналов в морском грунте в зависимости от глубины проникновения в морской грунт показали, что первое отражение регистрируется в придонном слое на верхних частотах спектра. По мере увеличения глубины (ниже поверхности дна) спектр расширяется в сторону низких частот, низкочастотная часть спектра увеличивается и начинает превалировать, а при дальнейшем увеличении глубины и оставшаяся низкочастотная часть плавно уменьшается. Максимальное значение интенсивности достигается в низкочастотной части спектра. Для мощных придонных отложений, иногда наблюдаются особенности в характере изменения. Эти особенности заключаются в относительном возрастании в некотором диапазоне глубин высокочастотной части спектра и проявляются в появлении низкочастотного спектра между высокочастотными спектрами. При этом преобладание низкочастотной части в этом диапазоне для этого типа грунтов менее значительно. Происходит выравнивание формы спектра и только потом уменьшение высокочастотной части, и затухание низкочастотной части. Эта особенность связана со слоистой структурой осадков и слабым поглощением в отдельных слоях. Данное обстоятельство ограничивает применение известного способа [3], так как при его реализации необходимо выделение из общих рядов дискретных измерений, выделение рядов дискретных измерений с наличием ровной поверхности дна, свободной от придонных отложений.
К существенному недостатку устройства для реализации известного способа следует отнести то обстоятельство, что при расчетах временных задержек прихода отраженных волн учитывается только изменение углов бортовой качки, в то время как результаты измерений, также будут отягощены влиянием килевой качки.
Кроме того, одной из задач вторичной обработки зарегистрированных сигналов является задача выявления структуры зондирующего пространства. Для этого необходимо локализовать слои, отражающие или рассеивающие акустические волны, т.е. обнаружить и определить координаты этих слоев на каждом цикле «излучение-прием». Кроме того, необходимо синхронизировать результаты измерений в соседних дискретных циклах измерений для получения картографического материала по результатам батиметрической съемки акватории. Данное обстоятельство обусловлено тем, что углы в вертикальной плоскости излучения и вертикальные координаты точек «излучение-прием» изменяются во времени и при наличии волнения.
Компенсация этих изменений необходима при выявлении слоистой среды. А также при «сшивке» откликов сигналов, отличающихся частотными характеристиками. Эта ситуация возникает при невозможности излучения частотно-модулированного сигнала необходимой девиации. Одним из способов, позволяющих выполнить данную компенсацию, является известный способ [3], который требует знания с высокой точностью определения изменения углов излучения в вертикальной плоскости и вертикальных координат точек «излучение-прием». И если в условиях установки гидролокатора бокового обзора на гидрографическом судне, оснащенном соответствующей аппаратурой (приемником спутниковой навигационной системы, совмещенной с инерциальной навигационной системой), положительный результат в компенсации изменений углов в вертикальной плоскости излучения может быть достигнут, то в условиях установки гидролокатора бокового обзора на подводном аппарате, буксируемым судном, а тем более и учет изменения вертикальных координат точек «излучение-прием», которые изменяются во времени и при наличии волнения, достижение технического результата в прототипе, практически невозможно.
Кроме того, в вертикальном направлении морская водная среда представляет собой горизонтально неоднородную среду с переменной скоростью звука. При прохождении в вертикальном направлении от поверхности до дна излученный звуковой импульс будет частично отражаться на внутренних неоднородностях водной среды и эти сигналы, также как и сигналы, отраженные от дна, будут регистрироваться приемным устройством. В итоге после момента излучения звукового импульса до момента приема сигнала, отраженного от дна, будут регистрироваться сигналы, отраженные от дна и от внутренних неоднородностей водной среды. В результате устройством регистрируются временные ряды плотности звуковой энергии, отраженной от дна и от внутренних неоднородностей водной среды.
В известных способах и устройствах сигналы, принятые от внутренних неоднородностей водной среды, подвергают сложной обработке с целью уменьшения их влияния на конечные результаты измерений. Однако интенсивные звуковые волны в воде не распространяются независимо, а вследствие нелинейных эффектов взаимодействуют между собой. Обычно в акустике дисперсия практически отсутствует и волны близких частот в квадратичном приближении эффективно взаимодействуют лишь только при коллинеарном распространении, когда выполняется условие синхронизма (см., например, Аредов А.А., Дронов P.M., Охрименко Н.Н., Фурдуев А.В. Экспериментальные оценки стационарности подводных шумов океана. // Акустический журнал, 1994, т.40, №3, с.357-361. Курьянов Б.М., Моисеев А.А. Исследование глубинной зависимости низкочастотных шумов океана с помощью буя управляемой плавучести. // Акустический журнал. 1994, т.40, №3, с.487-488. Деревянкина П.И., Капиельсон Б.Г., Любченко А.Ю. Вертикальная структура интенсивности низкочастотного шумового поля мелкого моря. // Акустический журнал. 1994, т.40, №3, с.380-384). Однако при взаимодействии волн, существенно различающихся по частоте, например, если интенсивный высокочастотный звуковой пучок распространяется в среде, возмущенной низкочастотной волной, возможен эффект модуляции высокочастотного пучка, степень которого будет зависеть от величины нелинейного параметра водной среды и угла между векторами распространения волн. Задачей предлагаемого технического решения является расширение функциональных возможностей способа определения глубин акватории, с одновременным повышением достоверности съемки дна акватории.
Поставленная задача решается за счет того, что в способе определения глубин акватории гидролокатором бокового обзора, включающем излучение гидроакустического сигнала в сторону дна и прием отраженных сигналов в двух точках, расположенных по вертикали на заданном расстоянии, измерение времени задержки прихода синфазных сигналов, угла бортовой качки носителя антенн и определение по полученным данным направлений прихода синфазных сигналов и искомых глубин акватории, в отличие от прототипа дополнительно определяют координаты отражающих (или рассеивающих) слоев на каждом цикле «излучение-прием», результаты измерений в соседних циклах синхронизируют при приеме отраженных сигналов, отличающихся частотными характеристиками, при определении угла бортовой качки выполняют последовательную коррекцию угловых и вертикальных перемещений для каждого цикла измерений, а в гидролокаторе бокового обзора для определения глубин акватории, содержащем функционально соединенные первую и вторую антенны и функционально соединенные передающий блок, приемоизмерительный блок, блок управления, вычислитель и регистратор, в отличие от прототипа, в передающий блок введен формирователь сигналов накачки, в приемоизмерительный блок введен компенсатор, передающий блок выполнен в виде параметрического излучающего тракта с возможностью коррекции фаз амплитуд принятых сигналов.
Техническая реализация заявляемого изобретения поясняется чертежами.
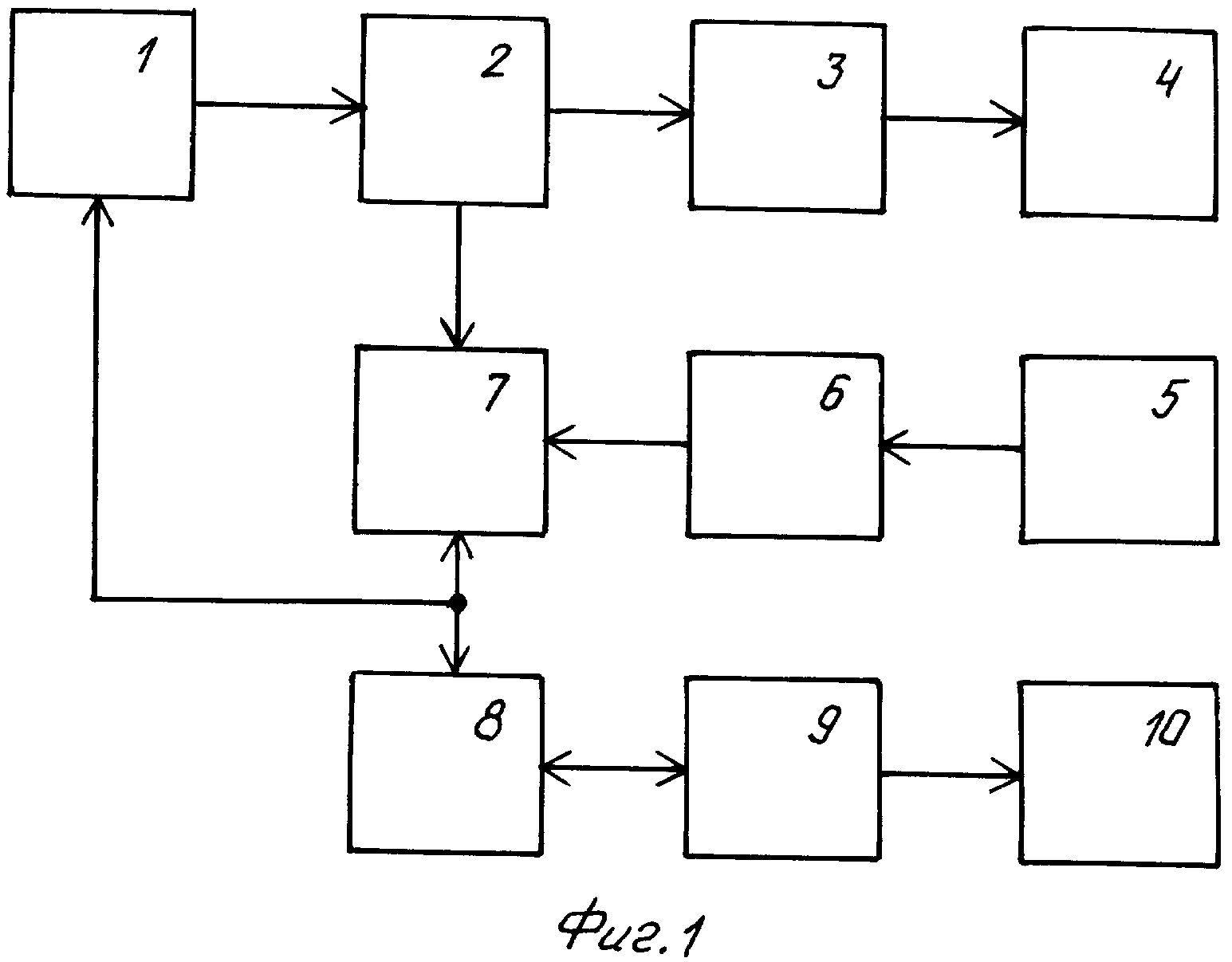
Фиг.1. Структурная блок-схема гидролокатора бокового обзора.
Гидролокатор бокового обзора включает формирователь сигналов накачки 1, предназначенный для формирования двухчастотных зондирующих сигналов накачки с заданной длительностью и заданной модуляцией, формирования импульсов синхронизации и сигналов стробирования приемного тракта, параметрический излучающий тракт 2, предназначенный для усиления сигналов накачки по обеим частотам до номинального уровня (при этом в отдельных каналах может осуществляться коррекция фаз амплитуд), излучающий преобразователь накачки 3, предназначенный для преобразования электрических сигналов в акустические сигналы необходимой характеристики направленности, излучающую антенну сигналов разностной частоты 4, предназначенную для формирования характеристики направленности, приемную антенну 5 для приема и преобразования акустических волн разностной частоты в электрические сигналы, приемный тракт 6, предназначенный для предварительной обработки принятых сигналов и усиления их до уровня, необходимого для регистрации принятых сигналов, компенсатор 7, блок управления 8, вычислитель 9 и регистратор 10.
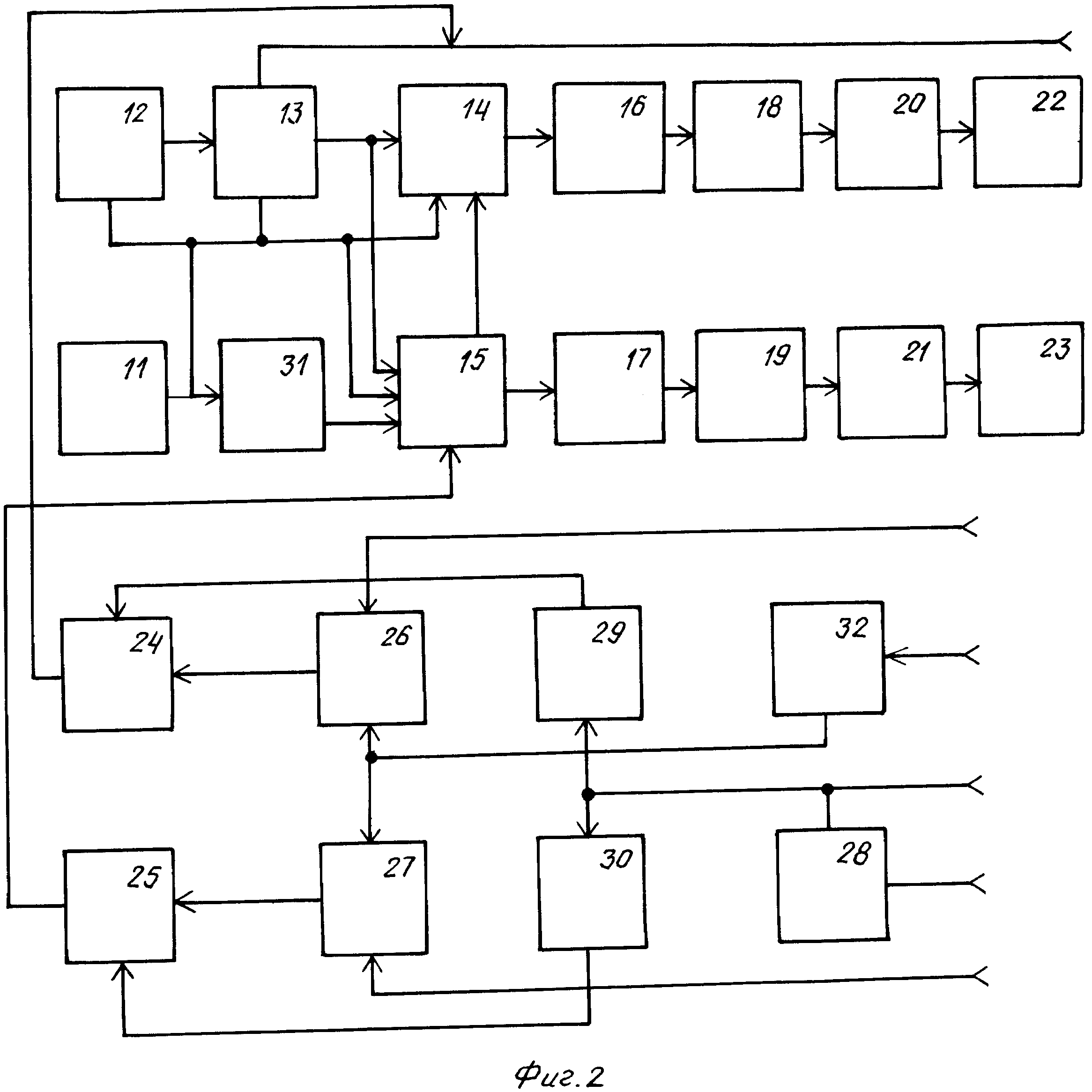
Фиг.2. Функциональная схема формирователя сигналов накачки. Формирователь сигналов накачки 1 состоит из кварцевого генератора 11 опорной частоты, формирователя 12 периода следования излучаемых импульсов накачки, устройства 13 формирования длительности излучаемого импульса, двух каналов формирования радиоимпульсов с частотами накачки, основу которых составляют фазовые накопители 14 и 15, представляющие собой накапливающие сумматоры и постоянные запоминающие устройства 16 и 17, цифроаналоговых преобразователей 18 и 19, усилителей мощности 20 и 21, фильтров 22 и 23 нижних частот, арифметико-логических устройств 24, 25, 26 и 27, счетчика 28, накапливающих сумматоров 29 и 30, генератора кодов фазы 31, аналого-цифрового преобразователя 32.
Усилители мощности 20, 21 состоят из четырех идентичных широкополосных блоков, включающих предварительные усилители и усилители мощности мощностью до 4000 Вт каждый, разбитых на две группы по два блока для усиления частот накачки f1 и f2. Перед усилителями установлены четыре фазокомпенсационных устройства. Выходной усилитель выполнен по двухконтактной схеме на мощных транзисторах ТК-152. Предварительный усилитель состоит из операционного усилителя и двух пар комплементарных среднемощных транзисторов.
Фиг.3. Блок-схема приемного тракта. Приемный тракт предназначен для приема, усиления и частотной селекции рассеянных сигналов волны разностной частоты в полосе частот 5-50 кГц. Чувствительность его по акустическому давлению составляет не менее 0,001 Па. Приемник выполнен по схеме прямого усиления. Приемник состоит из приемной антенны 5, предназначенной для преобразования акустических сигналов в электрические, полосовых фильтров 33 и 34, антенного усилителя 35, основного усилителя 36, формирователей 37, 38 кодов управления, блока фильтров 39, амплитудного детектора 40, фильтра 41 нижних частот, коммутатора 42, выходного усилителя 43.
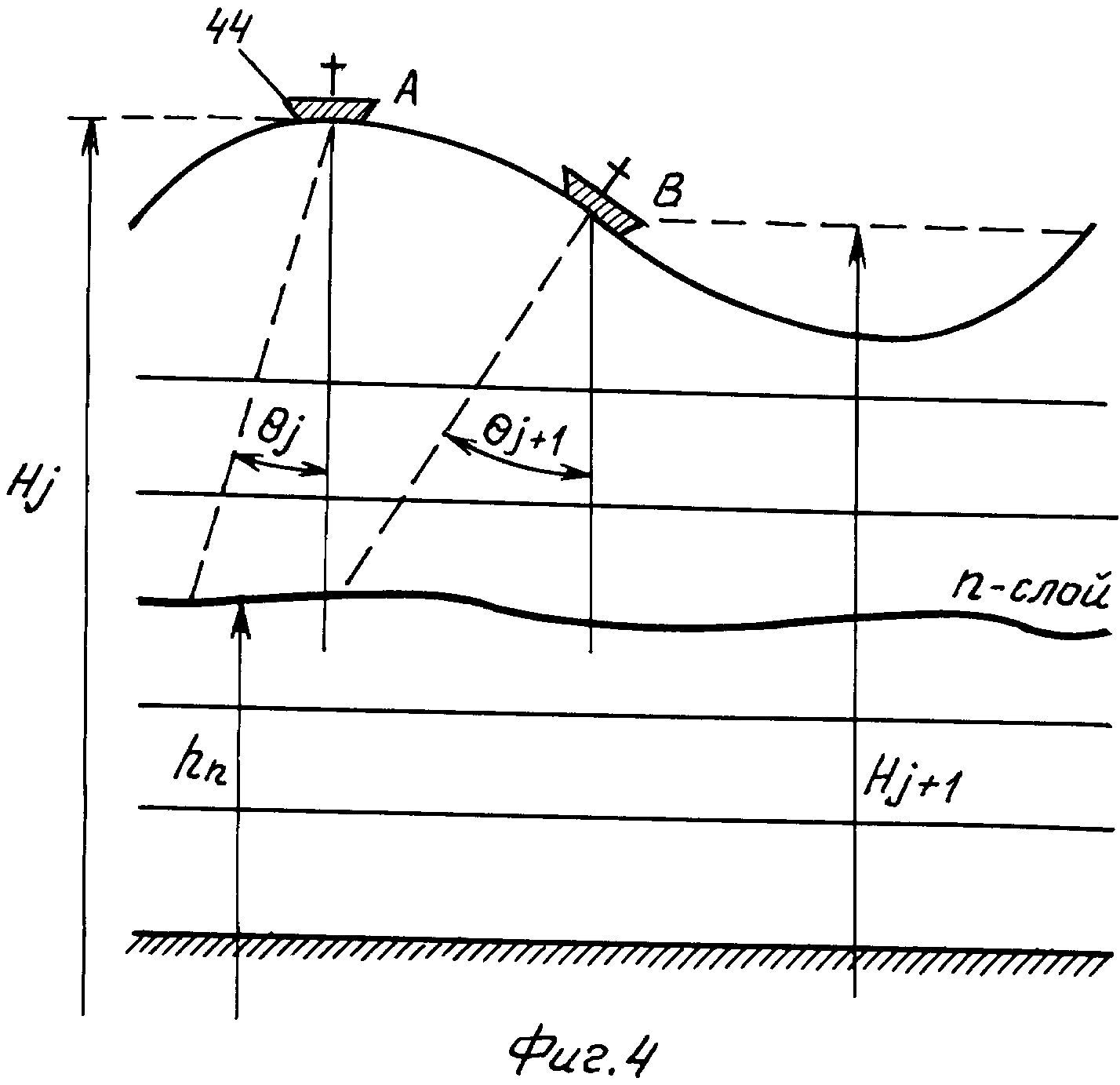
Фиг.4 Изменение координат точек излучения и приема сигналов. Судно 44, А,В - точки «излучение-прием» в j-м и j+1-м циклах соответственно, θj,θj+1 - углы в вертикальной плоскости, Hj Hj+1 - вертикальные координаты точек «излучение-прием», hn - вертикальная координата n - го слоя.
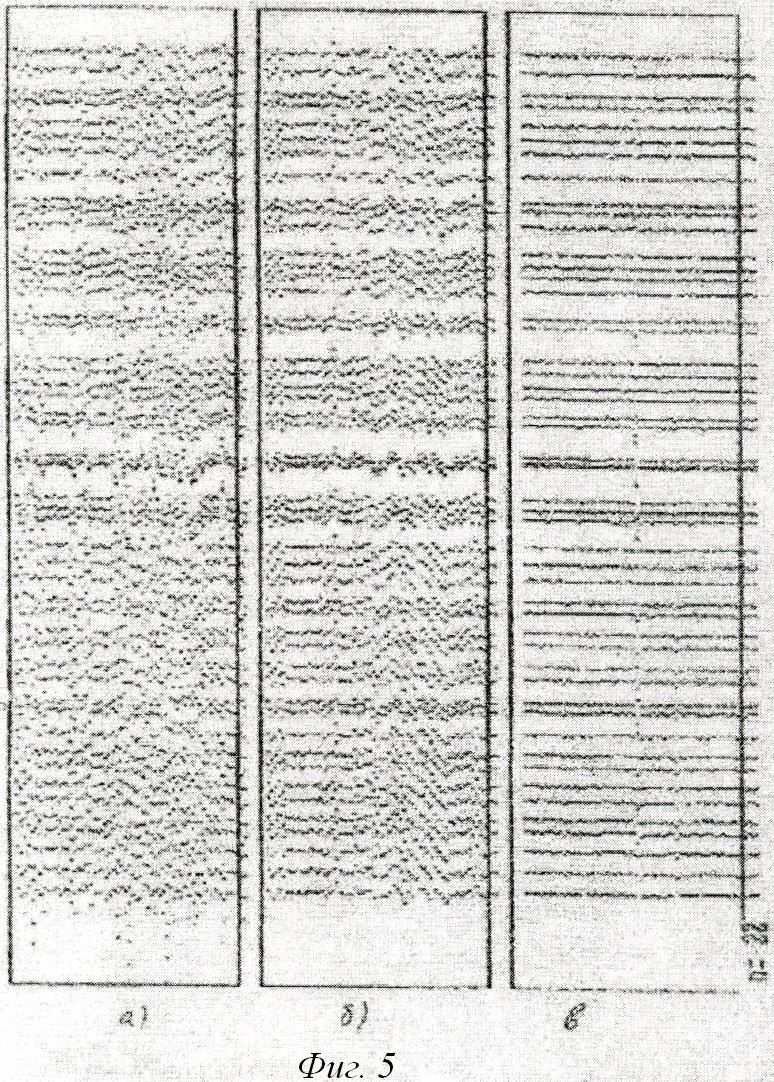
Фиг.5. Реализация алгоритма последовательной коррекции угловых и вертикальных перемещений. В графическом виде изображены:
- исходная последовательность {Sji}(фиг.5а);
- последовательность {Sji} после компенсации изменений угла (фиг.5б);
- окончательный результат (фиг.5в).
На фигурах точками обозначены максимумы, соответствующие отражающим слоям.
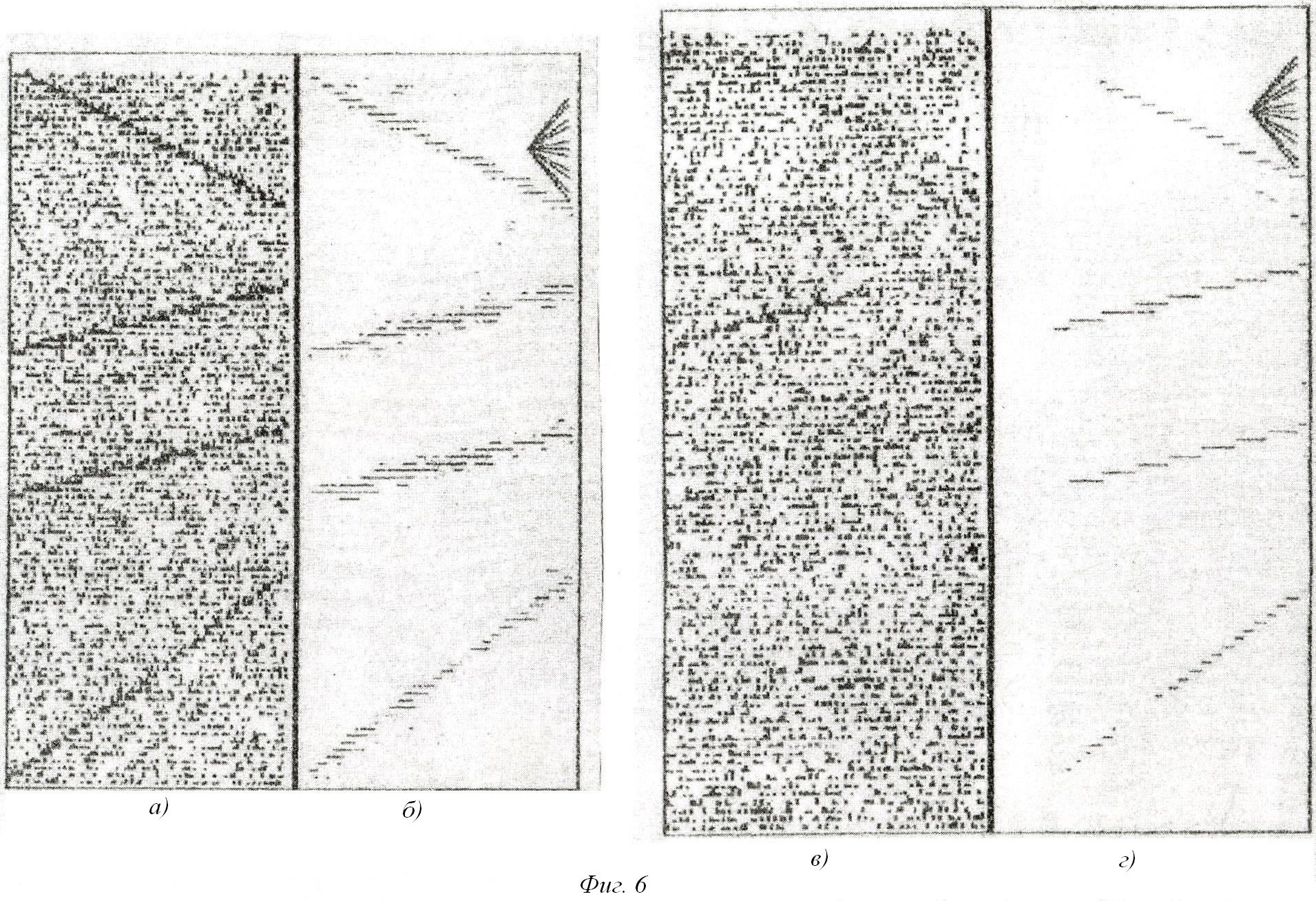
Фиг.6. Алгоритм обнаружения слабых сигналов (обнаружение слоев с малым коэффициентом отражения) на фоне помех. На фиг.6а в графическом виде отображена исходная последовательность {Sji}. На фиг.6б представлены координаты обнаруженных максимумов. На фиг.6в отношение сигнал/помеха равно 2, на фиг.6г отношение сигнал/помеха равно 0,8.
Формирователь сигналов накачки 1 (фиг.2) работает следующим образом. Кварцевый генератор 11 опорной частоты вырабатывает импульсы с частотой следования 2,04 МГц. Импульсы опорной частоты поступают на вход формирователя 12 периода следования излучаемых импульсов накачки, на входе которого формируются короткие импульсы с заданным периодом следования. Эти импульсы поступают на вход устройства 13 формирования длительности излучаемого импульса. С выхода устройства 13 снимаются прямоугольные импульсы, длительность которых может изменяться с помощью двоичных кодов, поступающих с блока управления 8.
Сформированные таким образом прямоугольные импульсы с заданными длительностью и частотой повторения поступают на два канала формирования радиоимпульсов с частотами накачки. Основу обоих каналов формирователя составляют фазовые накопители 14 и 15 и постоянные запоминающие устройства 16 и 17. Фазовые накопители управляются тактовыми импульсами генератора 11 опорной частоты и импульсами, поступающими с устройства 13. Восьмиразрядные коды с фазовых накопителей 14 и 15 поступают на адресные входы соответствующих постоянных запоминающих устройств 16 и 17, в которых записаны отсчеты периода синусоиды. Эти отсчеты выбираются в виде восьмиразрядных кодов, подаются на входы соответствующих цифроаналоговых преобразователей 18 и 19, с выходов которых через фильтры 20 и 21 нижних частот радиоимпульсы с прямоугольной огибающей и выбранными частотами заполнения, поступают на входы усилителей мощности 22 и 23.
Изменение частот накачки f1 и f2 производится с помощью двоичных кодов, подаваемых на входы фазовых накопителей 14 и 15 с арифметико-логических устройств 24 и 25 соответственно. Частота излучения может автоматически изменяться через каждый импульс излучения, через два, четыре, восемь или шестнадцать импульсов. Количество импульсов одной частоты задается счетчиком 28. Дискретность перестройки (62,5, 125, 200, 500 или 1000 Гц) выбирается блоком управления 8, устанавливающим соответствующий код на входах накапливающих сумматоров 29 и 30. Аналогово-цифровой преобразователь 32 своими выходными кодами, подаваемыми на нижние входы арифметико-логических устройств 26 и 27, определяет начальную разностную частоту. Изменение кодов осуществляется изменением опорного напряжения на входе аналого-цифрового преобразователя 18. На верхних входах устройств 26 и 27 постоянно заданы коды, определяемые резонансной частотой каждого из двух каналов антенны накачки. В формирователе сигналов накачки 1 имеется возможность формирования внутриимпульсной линейной частотной модуляции с фиксированными частотами. При этом сигнал формируется путем подачи кодов фазы на фазовые накопители 14 и 15 с генератора кодов фазы 31.
В приемном тракте 5 (фиг.3) полосовые фильтры 33 и 34 служат для подавления частот сигналов накачки, а также помех ниже частот рабочего диапазона. Они представляют собой пассивные фильтры верхних и нижних частот, включенных последовательно. Подавление сигналов частот накачки не хуже 60 дБ. Антенный усилитель 35 представляет собой широкополосный малошумящий предварительный усилитель. Для ослабления синфазной помехи последний каскад выполнен в дифференциальном включении. Коэффициент усиления составляет 26 дБ. Основной усилитель 36 трехкаскадный с ручной регулировкой усиления. Регулировка усиления осуществляется цифровыми кодами. Диапазон регулировки составляет 0-80 дБ. Блок фильтров 39 представляет собой набор фильтров нижних и верхних частот, которые с помощью коммутации объединены в полосовые фильтры с переменной полосой пропускания. Управление коммутаторами, а следовательно, и полосой пропускания осуществляется цифровыми кодами. Формирователи кодов 37 и 38 служат для формирования кодов управления коэффициентом усиления основного усилителя 36 и полосой пропускания блока фильтров 39. Линейный детектор состоит из амплитудного детектора 40 и фильтра нижних частот 41 и служит для выделения огибающей рассеянных сигналов волны разностной частоты в динамическом диапазоне 40 дБ. Коммутатор 42 предназначен для выбора отраженного сигнала или его огибающей. Выходной усилитель 43 служит для согласования приемника с внешними устройствами.
Вычислитель 9 включает контроллер, встроенный 8-канальный 16-разрядный АЦП типа AD 7715 с внешним входами для подключения приемного и излучающего каналов и внешних устройств, фильтр линейного предсказания, автономную систему контроля напряжения питания, внутренний температурный датчик на базе кремневого диодного р-n перехода, два компаратора с программируемым опорным напряжением, мультиплексор, последовательный интерфейс стандарта RS-232, три таймера, обеспечивающие измерение частоты относительно опорного кварцевого генератора, и представляет собой процессор с раздельными 14-битной шиной команд и 8-битной шиной данных. Двухступенчатый конвертор позволяет осуществлять выполнение до 35 команд в течение одного машинного цикла. Аналогом является микропроцессор типа PJC 14000.
Блок управления 8 включает центральный модуль, который осуществляет организацию режима измерения сигналов, обработку результатов измерений, формирование сигналов обмена с внешними устройствами и пакета данных в заданном формате, хранение в памяти для последующей обработки. Основными функциями, определяющими алгоритм работы, являются последовательное включение энергопитания и опрос выходных сигналов функциональных блоков в соответствии с заданной программой, осреднение результатов измерения по каждому каналу в соответствии с заданными временными интервалами, введение поправок в результаты измерений, учитывающие дрейф нуля АЦП, отклонение характеристик преобразования от исходной, температурную зависимость характеристик датчиков с представлением данных в виде условных кодов, приведение условных кодов измеренных величин к физическим значениям измеренных параметров в соответствии с алгоритмами обработки данных с учетом коэффициентов, запись и хранение полученных данных в буферной памяти микропроцессора, формирование сообщения установленного формата для передачи на внешние каналы связи. В состав программного обеспечения входят мощный микроассемблер, внутрисистемный и отладочный эмуляторы, универсальный программатор и компилятор. Графопостроитель 6 представляет собой плоттер.
Работа приемного тракта заключается в следующем. Отраженные акустические сигналы поступают на приемную антенну 5, которая преобразует акустическое давление в электрическое напряжение. Преобразованные антенной 5 сигналы поступают на полосовые фильтры 33 и 34, в которых осуществляется частотная селекция сигналов волны разностной частоты. С выходов фильтров 33 и 34 сигналы поступают на вход двуканального дифференциального антенного усилителя 35, в котором осуществляется предварительное усиление сигналов и подавление синфазной помехи и с выхода которого сигнал поступает на вход основного усилителя 36, коэффициент усиления которого зависит от кодов, поступающих на цифровые входы усилителя с формирователя кодов 37. Запирание основного усилителя на время посылки осуществляется инвертированным импульсом посылки с формирователя кодов 37. С выхода основного усилителя 36 усиленный сигнал поступает на вход блока фильтров 39 с регулируемой полосой пропускания. На цифровые входы блока фильтров 39 необходимый код поступает с формирователя кодов 41. С выхода блока фильтров 39 сигнал подается на вход амплитудного детектора 40, который выделяет модуль знакопеременного сигнала. Продетектированный сигнал с выхода амплитудного детектора 40 поступает на фильтр 41 нижних частот, в котором осуществляется выделение огибающей данного сигнала. Выделенная огибающая отраженного сигнала с амплитудного детектора 40 и отраженный сигнал с блока фильтров 39 поступают на вход коммутатора 42. Выбранный коммутатором 42 тип сигнала через согласующий выходной усилитель 43 подводится к внешним устройствам приемного тракта.
Параметрический излучающий тракт 2 включает антенну накачки, представляющую собой многоэлементную решетку, состоящую из двух двухчастотных каналов каждая. Элементы в каждой подрешетке расположены в порядке чередования типов с разной частотой и рассчитаны так, чтобы обеспечить наибольшую однородность акустического поля по обеим частотам. Активная часть двухчастотной мозаичной антенны выполнена из пьезокерамики стержневого типа. Разделение антенны на четыре канала позволяет добиться получения необходимой мощности и высокой надежности при работе транзисторных усилителей мощности. Антенна накачки имеет круглую форму диаметром активной поверхности 300 мм. Средняя рабочая частота накачки 180 кГц. Диапазон разностных частот 5-50 кГц. Расчетная ширина характеристики направленности на уровне 3 дБ составляет два градуса и постоянна в диапазоне рабочих частот.
Способ реализуется следующим образом. При движении носителя измерительной аппаратуры глубины, например судна 44, снабженного штатными средствами навигации: гидроакустическим лагом, измерителями курса, приемником спутниковых и радионавигационных систем, гидролокатором бокового обзора, выполняют определение глубин.
При этом одной из целей вторичной обработки сигнала является задача выявления слоистой структуры зондирующего пространства. Для этого следует локализовать слои, отражающие или рассеивающие акустические волны, т.е. обнаружить и определить координаты этих слоев на каждом цикле «излучение-прием». Кроме того, необходимо «связать» результаты измерений в соседних циклах для получения усредненный карты среды. На этом этапе обработки возникает ряд проблем.
Результатом первичной обработки (фильтрации) принятых сигналов являются последовательности вида

где Sji - значение члена j-й последовательности на выходе фильтра сжатия в момент i=E(t/Δt);
Δt - шаг дискретизации;
t - время от начала излучения;
N - число отражающих слоев;
Xn(i) - отсчеты отклика от n слоя на выходе фильтра с учетом отражающих свойств слоя;
lnj - временная координата n слоя в j последовательности;
ξ - значение шумовой помехи в момент i.
В результате совместной обработки значений приведенной последовательности следует определить координаты отражающих слоев и оценить их отражающие свойства. Решению этой задачи может помешать ряд факторов, сопутствующих натурным измерениям. К их числу относится работа на волнении, что приводит к случайному характеру значений координат lnj, наличие помех, «маскирующих» слои с небольшим коэффициентом отражения.
Рассмотрим особенности выявления слоистой структуры среды при работе в условиях волнения и при отсутствии пространственной стабилизации приемных и излучающих устройств (антенны 4,5). Пусть циклы «излучение-прием» происходят последовательно с периодом Т. В условиях волнения за период Т изменяются координаты точек излучения и приема сигналов (фиг.4).
Фиг.5. Изменение координат точек излучения и приема сигналов. Судно 47, А,В - точки «излучение-прием» в j-м и j+1-м циклах соответственно, θj,θj+1 - углы в вертикальной плоскости, Hj Hj+1 - вертикальные координаты точек «излучение-прием», Hn - вертикальная координата n-го слоя.
Для принятых обозначений  .
.
Величины Hj и θj являются случайными функциями времени (т.е. являются случайными последовательностями). Изменение временной координаты n-го слоя в соседних циклах описывается выражением  .
.
Компенсация этих изменений необходима при выявлении слоистой структуры среды, а также при «сшивке» откликов сигналов, отличающихся частотными характеристиками, Эта ситуация возникает при невозможности излучения частотно-модулированного сигнала необходимой девиации. Один из способов компенсации требует знания с высокой точностью θj,θj+1 и Hj Hj+1, т.е. необходимы датчики, измеряющие эти величины, что не всегда возможно, особенно при размещение гидролокатора бокового обзора на буксируемых подводных аппаратах, и что также требует пересчета координат пространственного местоположения буксируемого аппарата относительно судна.
При использовании известных способов обработки принятых последовательностей отраженных гидроакустических сигналов, отсутствуют операции, позволяющие компенсировать искажения координат слоев, не требующих дополнительной информации об изменении θ и Н. Что объясняется трудностями, возникающими при создании подобных алгоритмов, обусловленными невозможностью разделения Δlnn,j,j+1 на две частные составляющие, одна из которых обусловлена изменением угла, а другая - высоты, т.е. невозможностью представления Δlnn,j,j+1 в виде произведения или суммы частных ошибок.
При некоторых предположениях о характеристике среды и условиях проведения измерений возможен учет этих перемещений.
Пусть за время между соседними циклами «прием-излучение» вертикальные координаты Hn не изменяются резко. При сделанных предположениях рассмотрим следующую разность
 .
.
Приведенное выражение представляет собой произведение двух сомножителей 1/cosθj и hn+1-hn/С, первое из которых зависит только от угла θj, второе - от разности координат соседних слоев. Это обстоятельство позволяет предложить алгоритм обработки последовательностей {Sji}, с помощью которого можно отслеживать изменение θ и Н в соседних циклах «изучение-прием». Суть алгоритма в последовательной коррекции угловых и вертикальных перемещений. Для этого из исходной последовательности {Sji} определяют координаты максимумов lnj и вычисляют оценку математического ожидания разностей Δlnn,j,j+1

С учетом выражения для 

В полученном выражении Δhj является формальной оценкой математического ожидания расстояний между слоями в j-м цикле измерений.
Если Δhj и Δhj+1 близки, то можно образовать следующее соотношение
 или
или  .
.
Полученное значение С позволяет компенсировать изменение угла в соседних циклах измерений. Для этого координаты последовательностей {Sji} в j+1-м цикле изменяют в С-1 раз, образуя при этом новую последовательность {Sji}. Во вновь образованной последовательности координаты слоев имеют следующие значения
 .
.
Можно заметить, что на данном этапе произошла компенсация изменения угла θ.
Действительно  .
.
Вторая часть алгоритма позволяет компенсировать случайное изменение вертикальной координаты точки «излучение-прием». Для этого достаточно ввести в последовательность {Sj+1,j} такое смещение координат, чтобы минимизировать разность

т.е. δj+1→min pj+1.
Для проверки работоспособности описанного алгоритма была создана программа, реализующая предложенный алгоритм и программа-имитатор, генерирующая последовательности {Sji}.
Результаты данного алгоритма приведены на фиг.5, на котором в графическом виде изображены:
- исходная последовательность {Sji}(фиг.5а);
- последовательность {Sji} после компенсации изменений угла (фиг.5б);
- окончательный результат (фиг.5в).
На фиг.5 точками обозначены максимумы, соответствующие отражающим слоям. Условия изображенного эксперимента следующие: число реализаций - 60, число отсчетов в реализации - 600, шаг дискретизации - 1 мс, число обнаруженных слоев -50, средняя квадратичная ошибка изменений вертикального угла - 0,175 рад, средняя квадратичная ошибка изменений вертикальной координаты - 2 м.
Второй алгоритм предназначен для обнаружения слабых сигналов (обнаружение слоев с малым коэффициентом отражения) на фоне помех. Обнаружение происходит за счет увеличения отношения сигнал/помеха слабого сигнала в выходной последовательности.
Для этого производится временное накопление откликов, принадлежащих отдельным слоям. Основная трудность при организации накопления вызвана изменчивостью координат слоя. Если эти изменения происходят достаточно медленно, то можно считать, что на интервале усреднения изменение координат слоев происходит по линейному закону. Это позволяет достаточно просто реализовать алгоритм накопления.
На фиг.6 представлены результаты работы подобного алгоритма. На фиг.6а в графическом виде отображена исходная последовательность {Sji}. На фиг.6б представлены координаты обнаруженных максимумов. На фиг.6в - отношение сигнал/помеха равно 2, на фиг.6г - 0,8.
Данные операции выполняются на компенсаторе 7.
Блок управления 8 построен на основе процессора Intel Core2Duo.
Регистратор 10 представляет собой аппаратно-программный блок и состоит из процессора, графических ускорителей, объектно-графического движка типа OGRE, программных модулей типа PhysX, Hydrax, Skyx и ANSYS AQWA. В качестве графического движка возможно также применение коммерческих движков типа CRY ENGINE, VALVE или аналогичных.
Вычислитель 9 выполнен на основе вычислительной платформы в виде системы на кристалле типа System on Chip (SoC) и состоит из процессора общего назначения, функции которого заключаются в решении навигационных уравнений для обеспечения движения судна на промерных галсах во время батиметрической съемки морского дна и обслуживанием интерфейсов, и двух процессоров с векторно-матричными сопроцессорами, которые предназначены для полной программной обработки в реальном времени зарегистрированных сигналов.
Существенным преимуществом заявляемого способа определения глубин акватории гидролокатором бокового обзора и гидролокатора бокового обзора для его осуществления является возможность точного измерения координат рассеивающих слоев, что при применение в вычислителе 9 алгоритмов известного метода деконволюции при обработке временных рядов позволяет также получить оценки коэффициентов авторегрессионной модели с минимальной дисперсией ошибок, а использование алгоритма Левинсона для решения задачи деконволюции наблюдаемого временного ряда дает возможность при минимальных вычислительных затратах определить искомые параметры модели сложно-неоднородной среды. Процедура определения параметров сложно-неоднородной среды реализована с помощью фильтра линейного предсказания, выполненного в виде оптимального решетчатого фильтра.
Современная тенденция строительства подводных трубопроводов на больших глубинах вызывает необходимость использования дистанционно-управляемых подводных аппаратов с установленными на них, в том числе, и гидролокаторов бокового обзора для получения детальной картины дна. С учетом ограниченной грузоподъемности дистанционно-управляемых подводных аппаратов, предлагаемый способ определения глубин акватории гидролокатором бокового обзора и гидролокатор бокового обзора, позволяют с требуемой точностью выполнить батиметрическую съемку на глубоководных акваториях.
Реализация заявляемого способа технической трудности не представляет, так как для его осуществления используются штатные измерительные устройства (измеритель скорости, приемоиндикатор спутниковой или радионавигационной системы), установленные на носителе (судне) измерительной аппаратуры, а устройство для осуществления способа реализуется на доступной элементной базе, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "промышленная применимость".
Источники информации.
1. Судостроение за рубежом, Издание ЦНИИ Румб, 1987, с 76-80.
2. Stubbs A.К. Telesounding a merhod of wide swathe a depth measurement International Hydrographic Review 1974, 51 Ns 1, p.p.23-59.
3. Патент RU №1829019 А1, 23.07.1993.
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения
Способ геохимической разведки
Подвижный морской аппарат для подводных исследований
Способ подъема затонувшего судна и комплекс для подъема и транспортирования затонувших подводных лодок и других судов
Способ определения ускорения силы тяжести на движущемся объекте и устройство для определения ускорения силы тяжести на движущемся объекте
Способ определения местоположения измеренных глубин звуковыми сигналами
Навигационный комплекс
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических маяков-ответчиков
Интегрированный комплекс навигации и управления движением для автономных необитаемых подводных аппаратов
Способ регистрации сейсмических сигналов на акватории моря при поиске подводных залежей углеводородов
Способ определения предвестника землетрясения

