Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПАРКОВКОЙ ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ
Вид РИД
Изобретение
Область техники
[0001] Настоящее раскрытие относится к способу управления автоматической парковкой и устройству управления автоматической парковкой для транспортного средства, которое автоматически включает парковочную (стояночную) блокировку (park lock), когда автоматическая парковка завершается в целевом положении остановки.
Уровень техники
[0002] Из уровня техники известно автоматическое устройство помощи при парковке, которое автоматически включает парковочную блокировку, когда автоматическая парковка завершается в целевом положении остановки (например, см. Патентный документ 1).
Документы уровня техники
Патентные документы
[0003] Патентный документ 1: Выложенная заявка на патент Японии № 2015-120403
Сущность изобретения
Проблема, решаемая изобретением
[0004] Документ предшествующего уровня техники, описанный выше, раскрывает технологию, в которой после завершения автоматической парковки транспортного средства, как только водитель вышел из транспортного средства, источник питания транспортного средства выключается в состояние, в котором электрические компоненты не могут использоваться, и в которой, если водитель не вышел из транспортного средства, электрические компоненты могут использоваться. Однако вышеописанный документ предшествующего уровня техники не раскрывает отказоустойчивое управление в отношении возникновения системной неисправности системы парковочной блокировки, используемой в управлении автоматической парковкой; таким образом, есть место для анализа.
[0005] Ввиду проблемы, описанной выше, задачей настоящего изобретения является предотвращение прерывания управления автоматической парковкой до его завершения из-за неисправности, когда определяется возникновение неисправности системы до того, как начато управление автоматической парковкой.
Средство для решения проблемы
[0006] Для решения задачи, описанной выше, в настоящем раскрытии изобретения предусмотрена система управления парковкой по проводам (park-by-wire), в которой автоматически включается парковочная блокировка, когда автоматическая парковка завершается в целевом положении остановки с использованием управления автоматической парковкой.
В этом способе управления автоматической парковкой для транспортного средства определяется, будет ли возникать системная неисправность, при которой система управления парковкой по проводам не работает нормально во время управления автоматической парковкой.
При определении, до начала управления автоматической парковкой, того, что произойдет отказ системы, запуск управления автоматической парковкой будет запрещен.
Эффекты изобретения
[0007] Путем осуществления отказоустойчивого управления в отношении управления автоматической парковкой на основе определения возникновения неисправности системы таким образом, можно предотвратить прерывание управления автоматической парковкой до его завершения из-за неисправности, когда возникновение неисправности системы определяется до начала управления автоматической парковкой.
Краткое описание чертежей
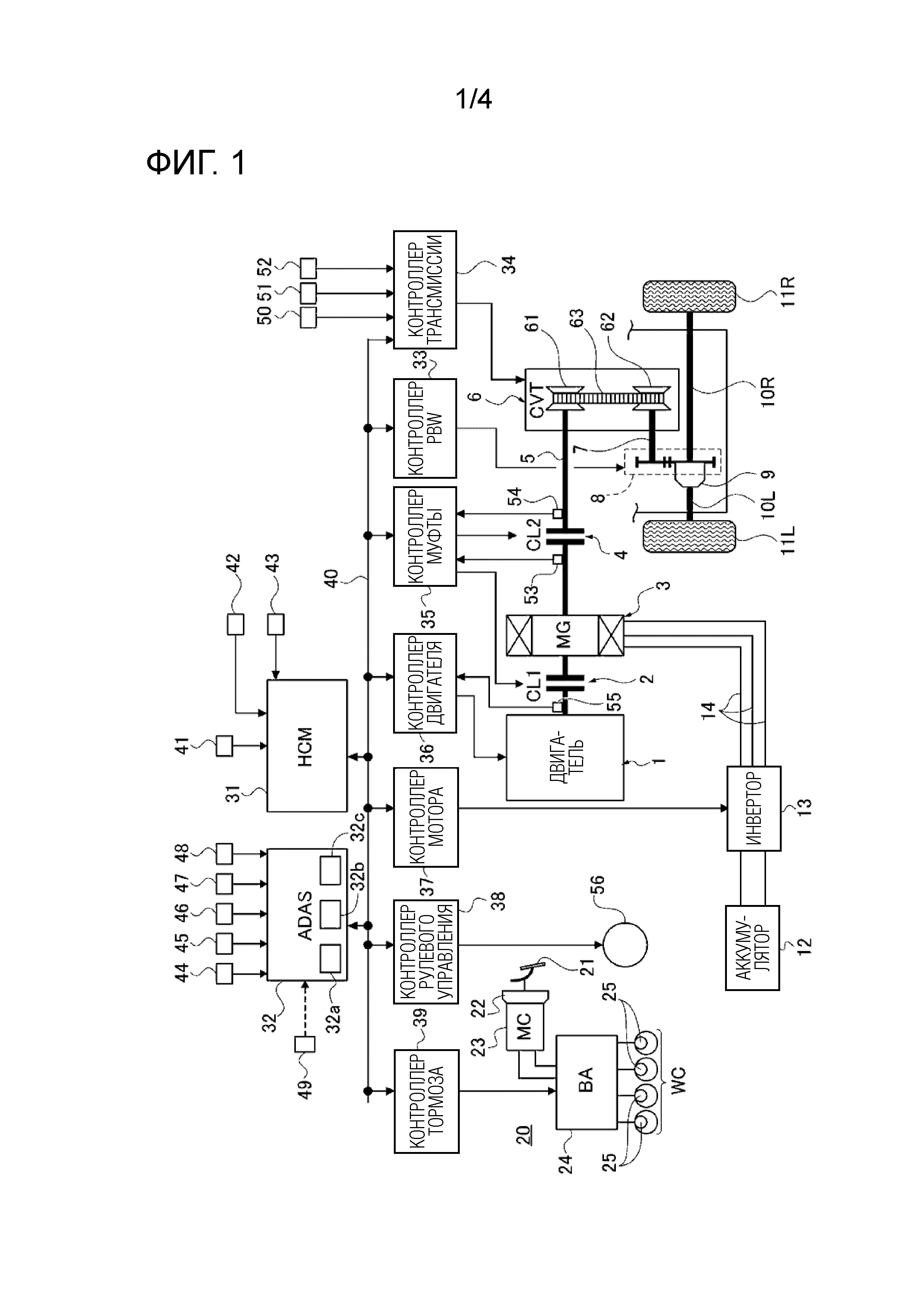
[0008] [Фиг. 1] представляет собой общий вид системы, иллюстрирующий гибридное транспортное средство FF (один пример транспортного средства), к которому применяется способ управления автоматической парковкой и устройство управления автоматической парковкой в соответствии с первым вариантом осуществления.
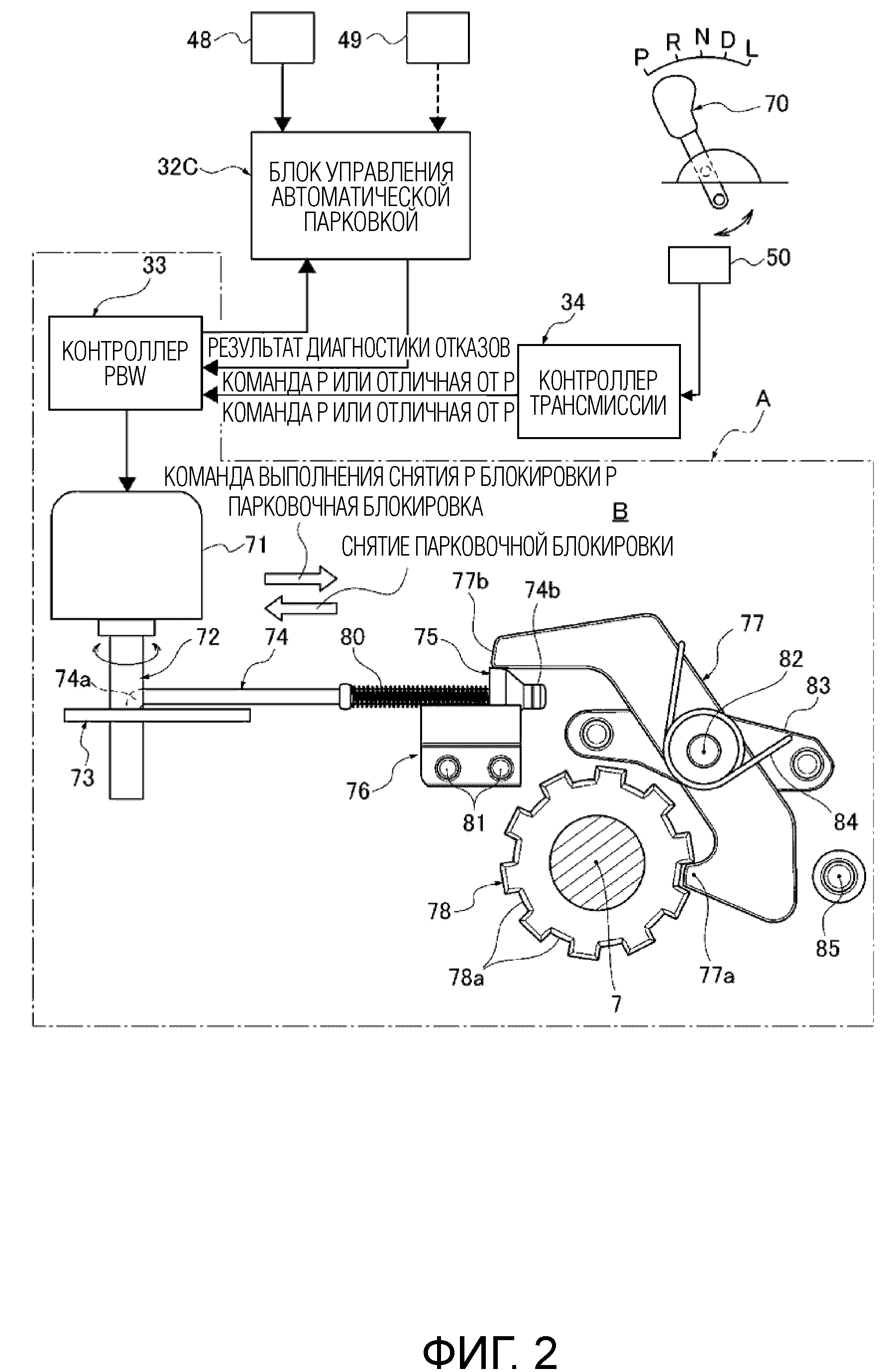
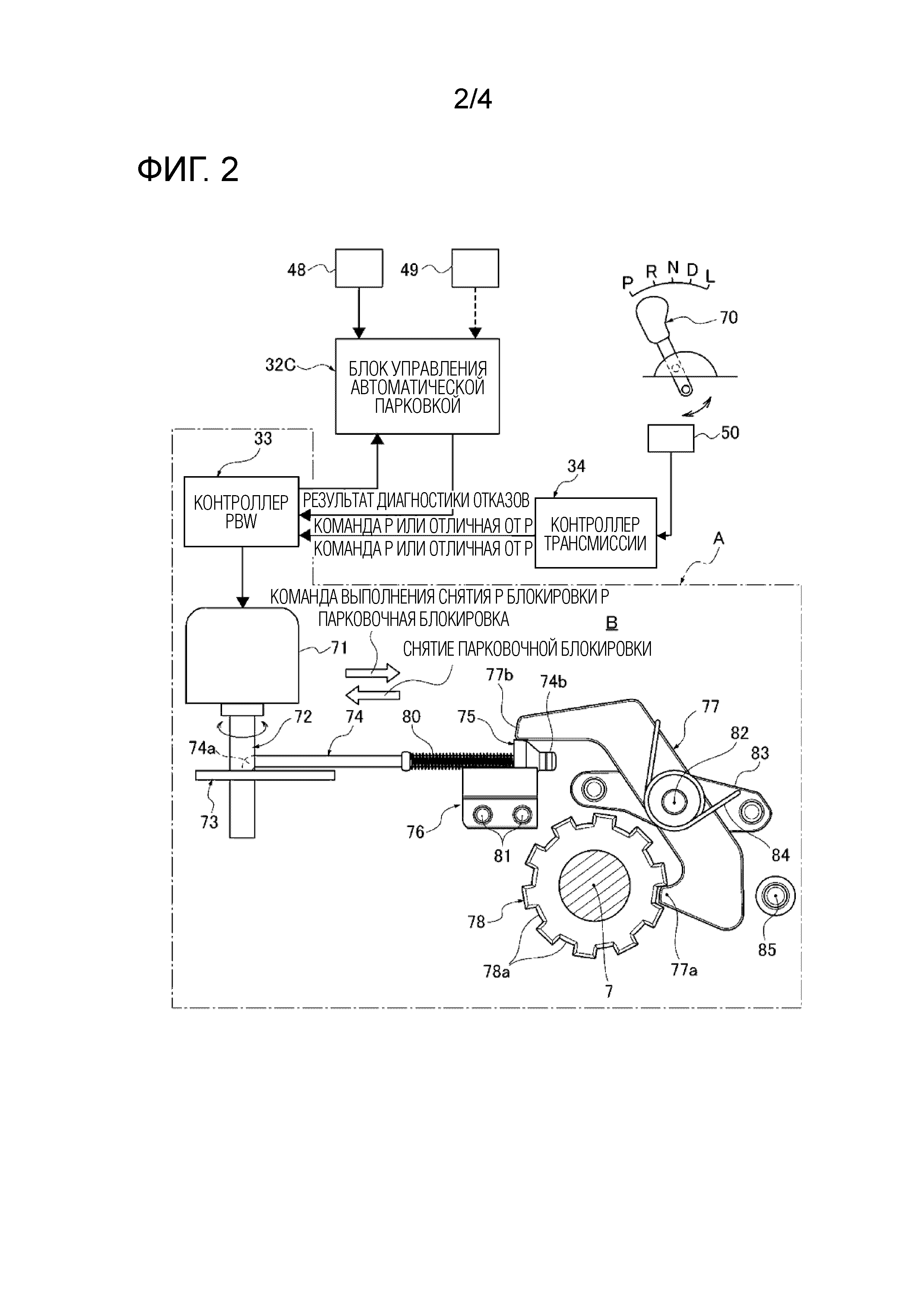
[Фиг. 2] является блок-схемой системы управления парковкой, иллюстрирующей систему управления парковкой, снабженную системой управления парковкой по проводам, которая автоматически включает парковочную блокировку, когда автоматическая парковка завершается при управлении автоматической парковкой.
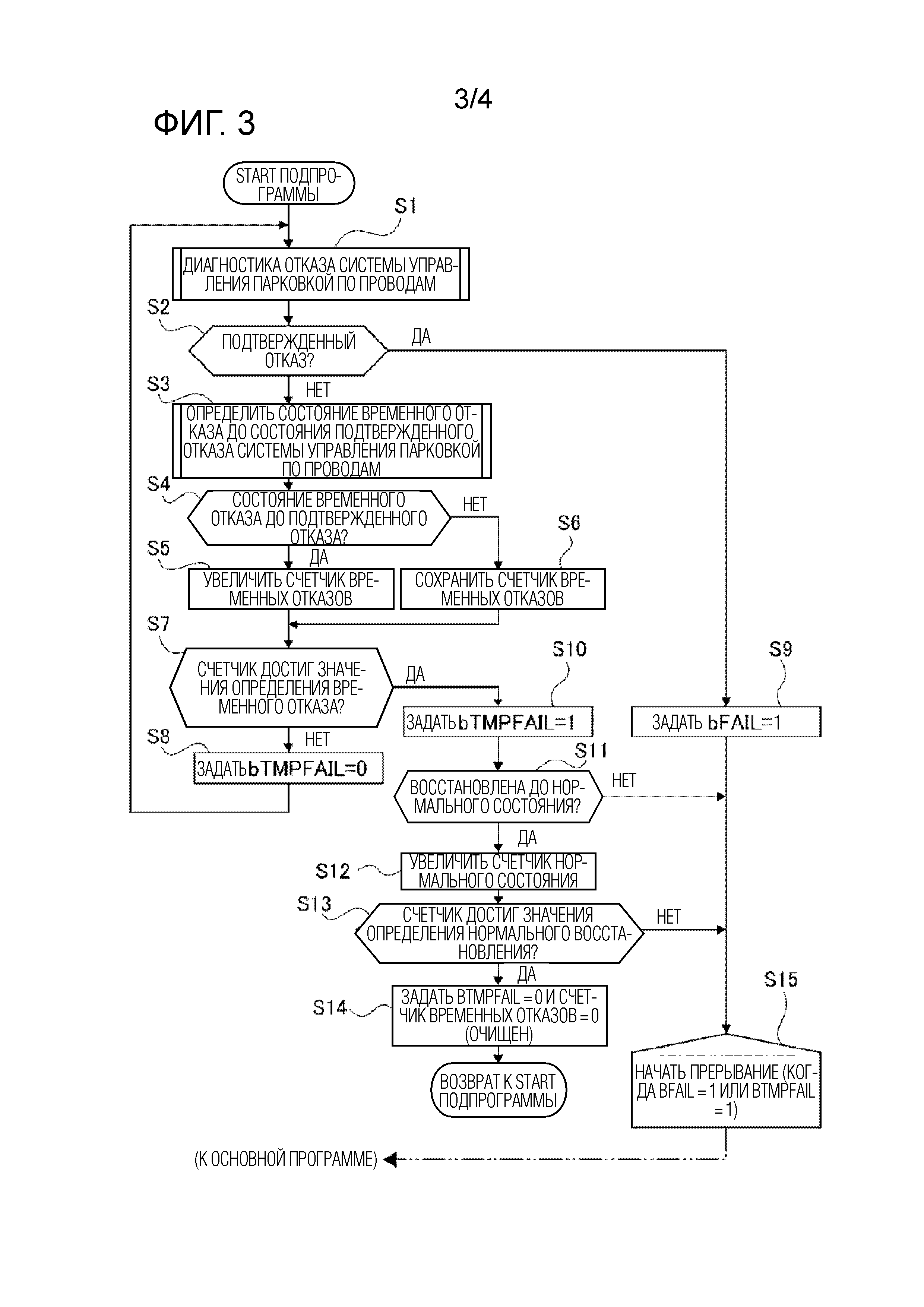
[Фиг. 3] является блок-схемой последовательности операций подпрограммы, иллюстрирующей последовательность процесса диагностики отказов системы управления парковкой по проводам, выполняемого контроллером PBW согласно первому варианту осуществления.
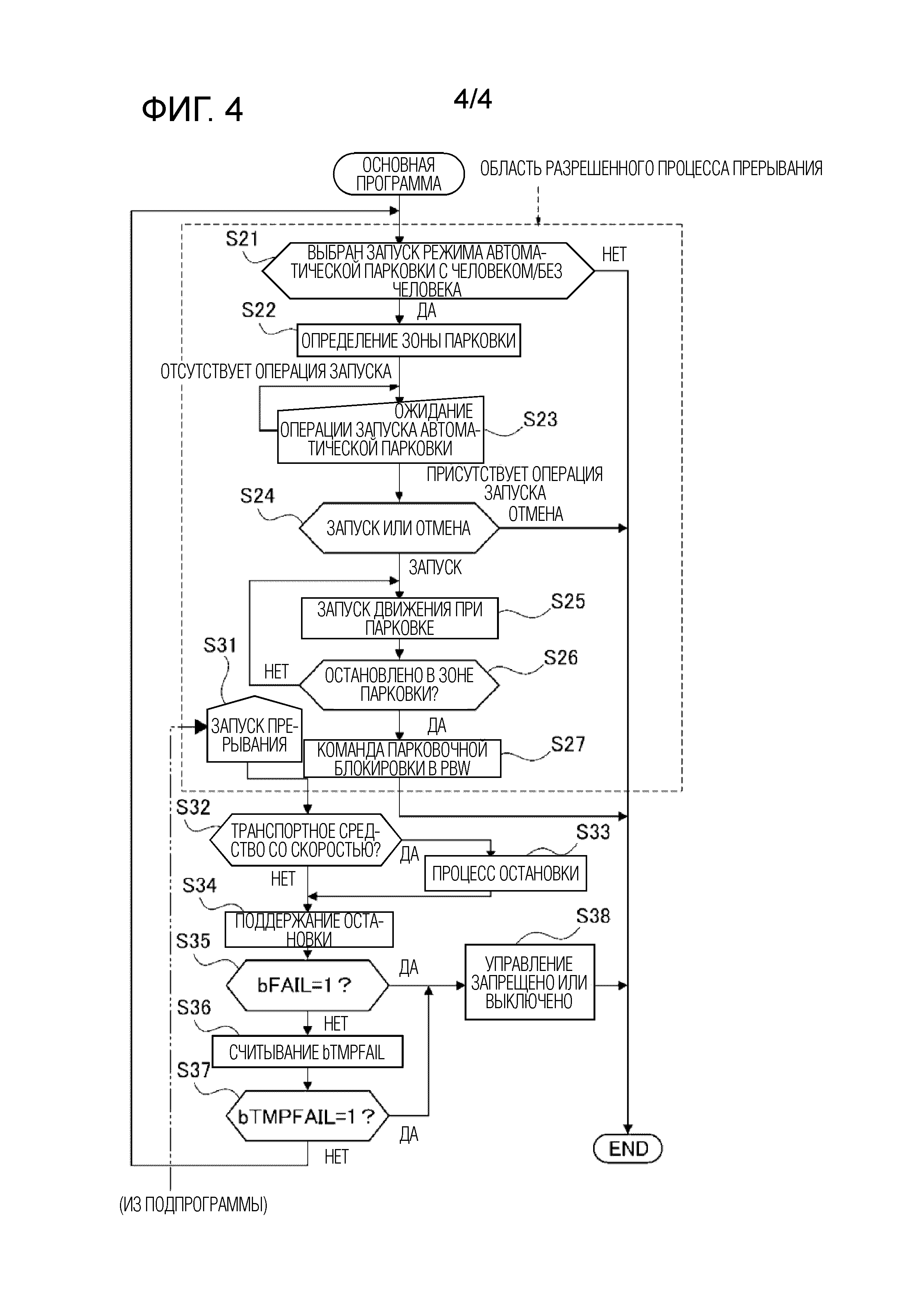
[Фиг. 4] является блок-схемой последовательности операций основной процедуры, иллюстрирующей последовательность операций процесса управления автоматической парковкой с использованием отказоустойчивого управления прерыванием, которое выполняется блоком управления автоматической парковкой в соответствии с первым вариантом осуществления.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0009] Предпочтительный вариант осуществления для реализации способа управления автоматической парковкой и устройства управления автоматической парковкой для транспортного средства согласно настоящему раскрытию будет описан ниже на основе первого варианта осуществления, проиллюстрированного на чертежах.
Первый вариант осуществления
[0010] Сначала описана конфигурация.
Способ управления автоматической парковкой и устройство управления автоматической парковкой в соответствии с первым вариантом осуществления применяются к гибридному транспортному средству FF (один пример транспортного средства), снабженному блоком управления автоматической парковкой в качестве одного средства управления содействием при вождении. «Общая конфигурация системы», «конфигурация системы управления парковкой по проводам», «конфигурация процесса диагностики отказа системы управления парковкой по проводам» и «конфигурация процесса управления автоматической парковкой, включая отказоустойчивое управление» будут отдельно описаны ниже, относительно конфигурации первого варианта осуществления.
[0011] [Общая конфигурация системы]
Фиг. 1 иллюстрирует общую систему гибридного транспортного средства FF, к которому применяется способ управления автоматической парковкой и устройство управления автоматической парковкой в соответствии с первым вариантом осуществления. Общая конфигурация системы гибридного транспортного средства FF будет описана ниже со ссылкой на фиг. 1.
[0012] Как показано на фиг.1, система привода гибридного транспортного средства FF содержит двигатель 1 (Eng), первую муфту 2 (CL1), мотор-генератор (двигатель-генератор) 3 (MG), вторую муфту 4 (CL2), входной вал 5 трансмиссии и бесступенчатую трансмиссию 6 ременного типа (сокращенно «CVT»). Выходной вал 7 трансмиссии бесступенчатой трансмиссии 6 ременного типа соединен с возможностью приведения в действие с правым и левым передними колесами 11R, 11L с помощью передачи 8 последней понижающей ступени, передней дифференциальной передачи 9 и приводных валов 10R, 10L правого и левого передних колес.
[0013] Первая муфта 2 представляет собой нормально разомкнутую сухую многодисковую муфту с гидравлическим приводом, которая расположена между двигателем 1 и мотор-генератором 3, в которой полное сцепление/скользящее сцепление/расцепление управляются посредством гидравлического давления первой муфты.
[0014] Мотор-генератор 3 представляет собой трехфазный синхронный двигатель переменного тока с постоянными магнитами, который соединен с двигателем 1 через первую муфту 2. Мотор-генератор 3 использует в качестве источника энергии аккумуляторную батарею 12 большой мощности, и к катушке статора через жгут 14 переменного тока подключен инвертор 13, который преобразует постоянный ток в трехфазный переменный ток во время подачи питания и трехфазный переменный ток в постоянный ток во время рекуперации.
[0015] Вторая муфта 4 представляет собой мокрую многодисковую фрикционную муфту с гидравлическим приводом, которая установлена между мотор-генератором 3 и правыми и левыми передними колесами 11R, 11L, которые являются ведущими колесами, в которых полное сцепление/скользящее сцепление/расцепление управляются с помощью гидравлического давления второй муфты. Вторая муфта 4 по первому варианту осуществления сконфигурирована с использованием передней муфты и заднего тормоза, предусмотренных в механизме переключения прямого/обратного хода бесступенчатой трансмиссии 6 ременного типа с использованием планетарных передач. То есть передняя муфта используется в качестве второй муфты 4 (CL2) во время движения вперед, а задний тормоз используется в качестве второй муфты 4 (CL2) во время движения назад.
[0016] Бесступенчатая трансмиссия 6 ременного типа состоит из первичного шкива 61, вторичного шкива 62 и ремня 63, который намотан вокруг обоих шкивов 61, 62. Бесступенчатая трансмиссия ременного типа реализует бесступенчатое передаточное число путем изменения диаметра намотки ремня путем смещения гидравлического давления, приложенного к первичной масляной камере ремня и вторичной масляной камере.
[0017] Первая муфта 2, мотор-генератор 3 и вторая муфта 4 составляют систему привода с одним мотором и двумя муфтами, и «режим EV» и «режим HEV» предусмотрены в качестве основных режимов привода этой системы привода. «Режим EV» представляет собой режим электрического транспортного средства, имеющего только мотор-генератор 3 в качестве источника привода, в котором первая муфта 2 отключена, а вторая муфта 4 включена, и движение посредством «режима EV» называется «движением EV». «Режим HEV» представляет собой режим гибридного транспортного средства, имеющего двигатель 1 и мотор-генератор 3 в качестве источников привода, в котором задействованы обе муфты 2, 4, и движение посредством этого «режима HEV» называется «движением HEV».
[0018] Теперь будет описана гидравлическая тормозная система. Гидравлическая тормозная система 20 включает в себя педаль 21 тормоза, усилитель 22 отрицательного давления, главный цилиндр 23, привод 24 давления тормозной жидкости и колесный цилиндр 25. Когда выполняется операция торможения, давления в колесных цилиндрах четырех колес независимо управляются на основе давления в главном цилиндре. С другой стороны, когда нет операции торможения, давления в колесных цилиндрах четырех колес независимо управляются на основе давления насоса от электрического масляного насоса, который работает в соответствии с командой внешнего управления. Привод 24 давления тормозной жидкости состоит из электрического масляного насоса и соленоидов снижения давления и повышения давления, установленных на каждом из четырех колес. Колесный цилиндр 25 предусмотрен в каждой позиции шин правого и левого передних колес 11R, 11L и правого и левого задних колес и не показан.
[0019] Во время операции торможения гидравлическая тормозная система 20 выполняет совместное управление торможением посредством величины рекуперации/величины давления жидкости, так что величина, полученная вычитанием величины рекуперации при движении накатом и величины совместной рекуперации тормозов, из целевой приводной силы замедления водителя, которая основана на величине нажатия педали, распределяется на гидравлическое тормозное усилие (механический тормоз). В дополнение к вышесказанному, гидравлическая тормозная система имеет различные функции, требующие управления давлением тормозной жидкости, такие как функция ABS, функция TCS, функция VDC, функция автоматического торможения, функция торможения в режиме круиз-контроля, функция торможения при управлении автоматической парковкой и т.д.
[0020] Как показано на фиг.1, система управления гибридным транспортным средством FF включает в себя гибридный модуль 31 управления (HCM) и блок 32 управления содействием при вождении (ADAS). В дополнение к этим устройствам управления предусмотрены контроллер 33 PBW, контроллер 34 трансмиссии, контроллер 35 муфты, контроллер 36 двигателя, контроллер 37 мотора, контроллер 38 рулевого управления и контроллер 39 тормоза. Эти управляющие устройства, включая гибридный модуль 31 управления, соединены посредством линии 40 связи CAN (CAN является аббревиатурой от «сети зоны контроллера» («Controller Area Network»)), чтобы иметь возможность двунаправленного обмена информацией.
[0021] Гибридный модуль 31 управления (HCM: сокращение от «Hybrid Control Module») является интегрированным устройством управления, имеющим функцию надлежащего управления потреблением энергии всего транспортного средства. Гибридный модуль 31 управления вводит информацию от переключателя 41 выбора режима рекуперации, датчика 42 степени открытия акселератора, датчика 43 скорости транспортного средства и т.п. Различные элементы управления затем выполняются на основе входной информации, такой как управление переходом режима между «режимом EV» и «режимом HEV», и управление выбором режима рекуперации.
[0022] Блок 32 управления содействием при вождении (ADAS: аббревиатура для «усовершенствованной системы помощи водителю») является устройством управления для содействия водителю в операции вождения. Этот блок 32 управления содействием при вождении вводит информацию от бортовой камеры 44, бортового радара 45, переключателя 46 выбора круизного хода, переключателя 47 выбора автоматического торможения, переключателя 48 выбора режима автоматической парковки с человеком, переключателя 49 выбора режима автоматического парковки без человека, и тому подобное. Бортовая камера 44 и бортовой радар 45 являются датчиками распознавания для распознавания окружающей среды рассматриваемого транспортного средства, такой как удещее впереди транспортное средство, едущее сзади транспортное средство и препятствие на дороге. Переключатель 47 выбора автоматического торможения, переключатель 46 выбора круизного движения и переключатель 48 выбора режима автоматической парковки с человеком являются переключателями, предусмотренными внутри салона и управляемыми водителем в транспортном средстве. Переключатель 49 выбора режима автоматической парковки без человека является переключателем, предусмотренным на беспроводном портативном терминале, и управляется водителем, который вышел и находится вдали от транспортного средства.
[0023] Блок 32 управления содействием при вождении включает в себя в качестве контроллеров, которые демонстрируют функцию управления содействием при вождении, блок 32a круиз-контроля, блок 32b управления экстренным тормозом и блок 32c управления автоматической парковкой.
[0024] Когда переключатель 46 выбора круизного хода включен во время движения, модуль 32a круиз-контроля поддерживает заданную скорость транспортного средства, если нет едущего впереди транспортного средства, когда переключатель включен, и поддерживает соответствующее расстояние между транспортными средствами, если есть едущее впереди транспортное средство, выполняя управление следованием за едущим впереди транспортным средством для следования за едущим впереди транспортным средством посредством замедления или ускорения.
[0025] Если переключатель 47 выбора автоматического торможения остается включенным, блок 32b управления аварийным тормозом обнаруживает пешеходов и транспортные средства, которые находятся впереди, и выполняет аварийное управление с использованием аварийного сигнала или автоматического торможения (медленный тормоз, аварийный тормоз), когда есть риск столкновения.
[0026] Когда водитель включает переключатель 48 выбора режима автоматической парковки с человеком, блок 32c управления автоматической парковкой выполняет управление автоматической парковкой в зоне парковки, в котором движение с человеком выполняется вдоль пути парковки в целевой зоне парковки от текущего положения до целевого положения остановки, и парковочная блокировка автоматически включается, когда автоматическая парковка завершается в целевом положении остановки. Кроме того, если переключатель 49 выбора режима автоматической парковки без человека включен для парковки в зоне парковки у въезда на парковку и т.д., выполняется управление автоматической парковкой в зоне парковки, в котором осуществляется движение без человека вдоль пути парковки в целевой зоне парковки от текущего положения до целевого положения остановки, и парковочная блокировка автоматически включается, когда автоматическая парковка завершается в целевом положении остановки. Если переключатель 49 выбора режима автоматической парковки без человека включается для выезда из зоны парковки, выполняется автоматическое управление выездом из зоны парковки, в котором припаркованное транспортное средство вызывается в целевое положение остановки вдоль пути выезда из целевой зоны парковки, и парковочная блокировка автоматически включается, когда автоматическая парковка завершается в целевом положении остановки. Блок 32c управления автоматической парковкой принимает в результате диагностики неисправности системы A управления парковкой по проводам от контроллера 33 PBW в качестве информации безотказного управления в управлении автоматической парковкой.
[0027] Контроллер 33 PBW вводит команду парковочной блокировки и команду снятия парковочной блокировки из блока 32c управления автоматической парковкой или из контроллера 34 трансмиссии. Затем контроллер вычисляет команду выполнения парковочной блокировки и команду выполнения снятия парковочной блокировки для привода 71 парковки (см. Фиг. 2) системы А управления парковкой по проводам. Контроллер 33 PBW выполняет функцию диагностики отказов системы А управления парковкой по проводам.
[0028] Контроллер 34 трансмиссии вводит информацию от переключателя 50 ингибитора, датчика 51 скорости вращения входного вала трансмиссии, датчика 52 скорости вращения выходного вала трансмиссии и т.п., и выполняет управление гидравлическим давлением переключения бесступенчатой трансмиссии 6 ременного типа и тому подобное. Когда сигнал положения диапазона P вводится от переключателя 50 ингибитора, который обнаруживает выбранное положение диапазона, контроллер 34 трансмиссии выводит команду парковочной блокировки в контроллер 33 PBW. Когда сигнал положения диапазона, отличный от сигнала положения диапазона P, вводится с переключателя 50 ингибитора, команда снятия парковочной блокировки выводится на контроллер 33 PBW.
[0029] Контроллер 35 муфты вводит информацию от гибридного модуля 31 управления, датчика 53 скорости вращения на входе второй муфты, датчика 54 скорости вращения на выходе второй муфты и т.п., и осуществляет управление гидравлическим давлением зацепления первой муфты 2 (CL1) и второй муфты 4 (CL2).
[0030] Контроллер 36 двигателя вводит информацию из гибридного модуля 31 управления, датчика 55 скорости вращения двигателя и т.п. и выполняет управление впрыском топлива, управление зажиганием, управление отсечкой топлива и т.п. двигателя 1.
[0031] Контроллер 37 мотора осуществляет управление питанием, рекуперативное управление и т.д. мотор-генератором 3 посредством инвертора 13 на основе команды от гибридного модуля 31 управления.
[0032] Когда управление автоматической парковкой в зоне парковки или управление автоматическим выездом из зоны парковки выбирается в блоке 32c управления автоматической парковкой, контроллер 38 рулевого управления вычисляет команду управления исполнительным механизмом на основе требуемого угла поворота от блока 32c управления автоматической парковкой. Затем команда управления исполнительным механизмом выводится из контроллера 38 рулевого управления в исполнительный механизм 56 рулевого управления для автоматического управления углом поворота рулевого колеса.
[0033] Контроллер 39 тормоза выводит управляющую команду на привод 24 давления тормозной жидкости, чтобы установить требуемое гидравлическое давление на основе требуемого давления тормозной жидкости от гибридного модуля 31 управления и блока 32 управления содействием при вождении.
[0034] [Конфигурация системы управления парковкой]
На фиг.2 показана система управления парковкой, снабженная системой А управления парковкой по проводам, которая автоматически включает парковочную блокировку, когда автоматическая парковка завершается при управлении автоматической парковкой. Конфигурация системы управления парковкой будет описана ниже со ссылкой на фиг. 2.
[0035] Как показано на фиг.2, система управления парковкой включает в себя блок 32c управления автоматической парковкой, переключатель 48 выбора режима автоматической парковки с человеком, переключатель 49 выбора режима автоматической парковки без человека, рычаг 70 выбора, переключатель 50 ингибитора, контроллер 34 трансмиссии и систему А управления парковкой по проводам. Система А управления парковкой по проводам состоит из контроллера 33 PBW, привода 71 парковки и механизма B парковочной блокировки. То есть система проводов A управления парковкой по проводам представляет собой систему, в которой рычаг 70 выбора и механизм B парковочной блокировки не связаны механически, а механизм B парковочной блокировки приводится в действие посредством привода 71 парковки.
[0036] Блок 32c управления автоматической парковкой вводит результат диагностики отказа от контроллера 33 PBW. Затем, во время управления автоматической парковкой с включенным переключателем 48 выбора режима автоматической парковки с человеком или переключателем 49 выбора режима автоматической парковки без человека, команда снятия (разблокировки) парковочной блокировки выводится на контроллер 33 PBW до тех пор, пока автоматическая парковка в целевом положении остановки не будет завершена. Затем, когда автоматическая парковка в целевом положении остановки завершена, команда парковочной блокировки выводится на контроллер 33 PBW.
[0037] Когда управление автоматической парковкой выключено, контроллер 34 трансмиссии выводит команду снятия парковочной блокировки в контроллер 33 PBW, в то время как положение диапазона, отличное от положения диапазона P, выбирается с помощью рычага 70 выбора. Затем, когда водитель управляет рычагом 70 выбора, чтобы выбрать положение диапазона Р, команда парковочной блокировки выводится на контроллер 33 PBW.
[0038] Когда команда парковочной блокировки вводится из блока 32c управления автоматической парковкой или из контроллера 34 трансмиссии, контроллер 33 PBW выводит команду выполнения парковочной блокировки в привод 71 парковки. Затем, когда команда снятия парковочной блокировки вводится из блока 32c управления автоматической парковкой или контроллера 34 трансмиссии, команда выполнения снятия парковочной блокировки выводится в привод 71 парковки. Кроме того, контроллер 33 PBW выполняет диагностику отказов, при которой отслеживаются условия работы двигателя и рабочее состояние мотора для электромотора привода 71 парковки, и определяется, произошел ли отказ в системе управления парковкой по проводам.
[0039] Привод 71 парковки использует электромотор, который вращается в одном направлении, когда принимается команда выполнения парковочной блокировки от контроллера 33 PBW, и вращается в обратном направлении, когда принимается команда выполнения снятия парковочной блокировки от контроллера 33 PBW.
[0040] Механизм B парковочной блокировки включает в себя вал 72 мотора привода 71 парковки, упорную пластину 73, парковочную тягу 74, клин 75, опорный элемент 76, парковочную стойку 77 и парковочную шестерню 78.
[0041] Парковочная тяга 74 представляет собой стержневой элемент, в котором одна концевая часть 74а соединена с упорной пластиной 73, которая прикреплена к валу 72 мотора, а другая концевая часть 74b проходит в направлении парковочной стойки 77. Одна концевая часть 74a парковочной тяги 74 вставлена в отверстие, образованное в упорной пластине 73, чтобы она могла вращаться, а другая концевая часть 74b выполнена в виде части большого диаметра, чтобы демонстрировать функцию стопора для ограничения движение клина 75.
[0042] Клин 75 является элементом функции ожидания, который прикреплен к внутреннему положению другой концевой части 74b парковочной тяги 74, чтобы быть подвижным. Этот клин 75 снабжен сквозным отверстием, образованным в положении центральной оси, и выполнен с возможностью перемещения посредством вставки парковочной тяги 74 в сквозное отверстие. Кроме того, спиральная пружина 80 прикладывает усилие смещения к клину 75 в направлении, в котором клин входит в контакт с другим концевым участком 74b парковочной тяги 74. Затем во время зацепления парковочной блокировки зацепление между парковочной стойкой 77 и парковочной шестерней 78 поддерживается путем приведения другого концевого участка 77b парковочной стойки 77 в контакт с клином 75 и поддерживается посредством клина 75.
[0043] Опорный элемент 76 закреплен в положении, в котором клин 75 расположен, направляет и поддерживает поверхность клина 75 на противоположной стороне поверхности, с которой другой концевой участок 77b парковочной стойки 77 входит в контакт, чтобы быть линейно подвижным. Этот опорный элемент 76 прикреплен к элементу корпуса с помощью болта 81.
[0044] Парковочная стойка 77 выполнена с возможностью поворота относительно элемента корпуса через штифт 82 стойки. Одна концевая часть парковочной стойки 77 имеет установочную собачку 77a, которая входит в зацепление с углублениями 78a зуба парковочной шестерни 78. Другая концевая часть 77b парковочной стойки 77 имеет дугообразную форму поверхности для контакта с клином 75. Пружина 84, сила смещения которой действует в направлении увеличения силы контакта между клином 75 и другой концевой частью 77b парковочной стойки 77, предусмотрена между парковочной стойкой 77 и опорным кронштейном 83 для штифта. Стопорный штифт 85, который ограничивает максимальный угол смещения в состоянии, в котором сцепление парковочной стойки 77 с парковочной шестерней 78 отпущено, закреплен на элементе корпуса во внешнем периферийном положении одного конца парковочной стойки 77. Парковочная шестерня 78 предусмотрена, например, на зубчатом валу выходного вала 7 трансмиссии или на передаче 8 последней понижающей ступени.
[0045] Механизм B парковочной блокировки работает следующим образом. Когда привод 71 парковки вращается в одном направлении, когда принимается команда выполнения парковочной блокировки от контроллера 33 PBW, парковочная тяга 74 перемещается вправо на фиг.2, и парковочная стойка 77 входит в зацепление с парковочной шестерней 78, входя в состояние парковочной блокировки. Когда привод 71 парковки вращается в обратном направлении, когда принимается команда выполнения снятия парковочной блокировки от контроллера 33 PBW, парковочная тяга 74 перемещается влево на фиг.2, и парковочная стойка 77 отсоединяется от парковочной шестерни 78, входя в состояние снятия парковочной блокировки.
[0046] [Конфигурация процесса диагностики отказа системы управления парковкой по проводам]
Фиг. 3 - блок-схема последовательности операций подпрограммы, иллюстрирующая последовательность операций процесса диагностики отказов системы А управления парковкой по проводам, выполняемого контроллером 22 PBW согласно первому варианту осуществления. Каждый из этапов на фиг. 3, которые представляют конфигурацию процесса диагностики отказов системы А управления парковкой по проводам будет описан ниже. Блок-схема на фиг. 3 постоянно выполняется от включения зажигания до выключения.
[0047] На этапе S1, после START или установки bTMPFAIL=0 на этапе S8, выполняется процесс диагностики отказа системы А управления парковкой по проводам для определения отказа, при котором система A управления парковкой по проводам становится неспособной задействовать парковочную блокировку, и процесс переходит к этапу S2.
[0048] Здесь, в обработке диагностики отказа системы А управления парковкой по проводам, типы диагностируемых отказов, при которых система А управления парковкой по проводам становится неспособной задействовать парковочную блокировку, включают в себя такие неисправности (подтвержденный отказ), которые не устранятся с течением времени, например, механические неисправности или отказы при отключении/коротком замыкании привода 71 парковки. Кроме того, напряжение мотора/ток мотора и т.д., которые могут быть приложены к мотору, контролируются на основе температуры мотора и емкости/температуры аккумулятора, и диагностируются временные отказы, которые могут быть устранены с течением времени. Когда диагностируется временный отказ, порог определения напряжения мотора/порог определения тока мотора для временного отказа может предоставляться как фиксированное значение или как переменное значение в соответствии с сопротивлением нагрузки, которое прикладывается к приводу 71 парковки из-за градиента дорожного покрытия или тому подобного.
[0049] На этапе S2, после диагностики отказа системы управления парковкой по проводам на этапе S1, определяется, подтвержден ли отказ системы А управления парковкой по проводам. Если ДА (подтвержденный отказ), процесс переходит к этапу S9, а если НЕТ (неподтвержденный отказ), процесс переходит к этапу S3. Здесь, в случае ненормальной неисправности, которая не будет устранена с течением времени, такой как механические неисправности или неисправности отключения/короткого замыкания привода 71 парковки, отказ подтверждается, и процесс переходит к этапу S9; в противном случае процесс переходит к этапу S3.
[0050] На этапе S3, после определения, что отказ не подтвержден на этапе S2, определяется состояние временного отказа до подтвержденного отказа системы A управления парковкой по проводам, и процесс переходит к этапу S4. Здесь состояние временного отказа до подтвержденного отказа - это отказ, который будет устранен с течением времени из числа отказов, в которых система А управления парковкой по проводам становится неспособной задействовать парковочную блокировку.
[0051] На этапе S4, после определения состояния временного отказа до подтвержденного отказа системы А управления парковкой по проводам на этапе S3, определяется, является ли это состояние состоянием временного отказа до подтвержденного отказа. Если ДА (состояние временного отказа), процесс переходит к этапу S5, а если НЕТ (нормальное состояние), процесс переходит к этапу S6.
[0052] На этапе S5, после определения того, что это состояние временного отказа на этапе S4, значение счетчика временных отказов увеличивается, и процесс переходит к этапу S7.
[0053] На этапе S6 после определения того, что это нормальное состояние на этапе S4, значение счетчика временных отказов сохраняется, и процесс переходит к этапу S7.
[0054] На этапе S7 после увеличения значения счетчика временных отказов на этапе S5 или сохранения значения счетчика временных отказов на этапе S6 определяется, достигло ли значение счетчика временных отказов порога определения отказов. Если ДА (значение счетчика временных отказов ≥ порога определения отказов), процесс переходит к этапу S10, и если НЕТ (значение счетчика временных отказов < порога определения отказов), процесс переходит к этапу S8.
[0055] На этапе S8 после определения того, что значение счетчика временных отказов < порога определения отказов на этапе S7, флаг определения временных отказов (bTMPFAIL) установлен в bTMPFAIL=0, и процесс возвращается к этапу S1.
[0056] На этапе S9 после определения того, что это подтвержденный отказ на этапе S2, флаг подтвержденного отказа (bFAIL) системы A управления парковкой по проводам устанавливается равным bFAIL=1, и процесс переходит к этапу S15.
[0057] На этапе S10, после определения того, что значение счетчика временных отказов ≥ порога определения отказов на этапе S7, флаг определения временных отказов (bTMPFAIL) устанавливается в bTMPFAIL=1, и процесс переходит к этапу S11.
[0058] На этапе S11, после установки bTMPFAIL=1 на этапе S10, определяется, восстановилась ли система А управления парковкой по проводам до нормального состояния. Если ДА (восстановлена до нормального состояния), процесс переходит к этапу S12, а если НЕТ (состояние временного отказа), процесс переходит к этапу S15.
[0059] На этапе S12, после определения восстановления до нормального состояния на этапе S11 значение счетчика восстановления нормального состояния увеличивается, и процесс переходит к этапу S13.
[0060] На этапе S13 после увеличения значения счетчика восстановления нормального состояния на этапе S12 определяется, достигло ли значение счетчика восстановления нормального состояния порогового значения определения нормального восстановления. Если ДА (значение счетчика восстановления нормального состояния ≥ порога определения нормального восстановления), процесс переходит к этапу S14, и если НЕТ (значение счетчика восстановления нормального состояния < порога определения нормального восстановления), процесс переходит к этапу S15.
[0061] На этапе S14 после определения, что значение счетчика восстановления нормального состояния ≥ порога определения нормального восстановления на этапе S13, флаг определения временного отказа (bTMPFAIL) устанавливают в bTMPFAIL=0, значение счетчика временных отказов очищается, и процесс переходит в ВОЗВРАТ.
[0062] На этапе S15, после установки b=1 на этапе S9, определения, что это состояние временного отказа на этапе S11, или определения, что значение счетчика восстановления нормального состояния < порога определения нормального восстановления на этапе S13, инициируется прерывание основной блок-схемы, показанной на фиг. 4. То есть, когда установлен флаг подтвержденного отказа bFAIL=1 или установлен флаг определения временного отказа bTMPFAIL=1 в процессе диагностики отказов системы А управления парковкой по проводам на фиг. 3, инициируется прерывание основной процедуры, показанное на фиг. 4.
[0063] [Конфигурация процесса управления автоматической парковкой с использованием отказоустойчивого управления прерываниями]
Фиг. 4 иллюстрирует последовательность операций процесса управления автоматической парковкой посредством управления отказоустойчивым прерыванием, выполняемого блоком 32c управления автоматической парковкой в соответствии с первым вариантом осуществления. Каждый из этапов на фиг. 4, которые представляют конфигурацию процесса управления автоматической парковкой посредством отказоустойчивого управления прерыванием, будет описан ниже. Блок-схема последовательности операций на фиг.4 выполняется, когда выполняется условие запуска (выбран запуск режима автоматической парковки).
[0064] На этапе S21 после START или определения, что bTMPFAIL=0 на этапе S37, определяется, был ли выбран запуск режима автоматической парковки с человеком/без человека с помощью операции переключателя 48 выбора режима автоматической парковки с человеком или переключателя 49 выбора режима автоматической парковки без человека. Если ДА (выбран запуск режима автоматической парковки), процесс переходит к этапу S22, а если НЕТ (запуск режима автоматической парковки не выбран), процесс переходит к концу (END). Здесь запуск режима автоматической парковки с человеком означает запуск управления автоматической парковкой в зоне парковки или автоматического выезда из зоны парковки с водителем в транспортном средстве с помощью операции переключателя 48 выбора режима автоматической парковки с человеком. Запуск режима автоматической парковки без человека означает запуск управления автоматической парковкой в зоне парковки или управления автоматическим выездом из зоны парковки, когда водитель выходит из автомобиля с помощью переключателя 49 выбора режима автоматической парковки без человека.
[0065] На этапе S22, после определения того, что на этапе S21 был выбран запуск режима автоматической парковки, определяется зона парковки, и процесс переходит к этапу S23. Здесь определение зоны парковки означает определение зоны парковки, в которой запланирована парковка рассматриваемого транспортного средства в случае управления автоматической парковкой в зоне парковки, и определение зоны, в которой рассматриваемое транспортное средство временно остановлено после того, как рассматриваемое транспортное средство выехало из положения парковки в случае автоматического выезда из зоны парковки.
[0066] На этапе S23, после определения зоны парковки на этапе S22, ожидается операция запуска для автоматической парковки, и когда операция запуска происходит, процесс переходит к этапу S24. Здесь появление операции запуска для автоматической парковки означает, что условия для запуска движения с человеком/без человека в направлении зоны парковки удовлетворены.
[0067] На этапе S24 после определения, что на этапе S23 существует операция запуска для автоматической парковки, определяется, запускать или отменять автоматическую парковку. Если автоматическая парковка должна быть запущена, процесс переходит к этапу S25, и если автоматическая парковка должна быть отменена, процесс переходит к END.
[0068] На этапе S25, после определения запуска автоматической парковки на этапе S24 или определения, что транспортное средство не остановлено в зоне парковки на этапе S26, начинается движение при парковке, и процесс переходит к этапу S26.
[0069] На этапе S26, после начала движения при парковке на этапе S25, определяется, остановлено ли транспортное средство в зоне парковки. Если ДА (транспортное средство остановлено в зоне парковки), процесс переходит к этапу S27, и если НЕТ (транспортное средство не остановлено в зоне парковки), процесс возвращается к этапу S25.
[0070] На этапе S27, после определения, что транспортное средство припарковано в зоне парковки на этапе S26, команда парковочной блокировки выводится на контроллер 33 PBW, и процесс переходит к END.
[0071] На этапе S31 период времени до определения, что запуск режима автоматической парковки с человеком/без человека был выбран на этапе S21, до тех пор, пока на этапе S27 не выводится команда парковочной блокировки, задается как область разрешенного процесса прерывания, прерывание запускается, и процесс переходит к этапу S32.
[0072] На этапе S32, после начала прерывания на этапе S31, определяется, имеет ли рассматриваемое транспортное средство скорость транспортного средства. Если ДА (скорость транспортного средства), процесс переходит к этапу S33, и если НЕТ (нет скорости транспортного средства), процесс переходит к этапу S34.
[0073] На этапе S33, после определения скорости транспортного средства на этапе S32, выполняется процесс остановки для приведения в действие гидравлического тормоза, и процесс переходит к этапу S34.
[0074] На этапе S34, после определения отсутствия скорости транспортного средства на этапе S32 или после процесса остановки на этапе S33, состояние остановки основного транспортного средства сохраняется, и процесс переходит к этапу S35. В итоге, когда флаг bFAIL подтвержденного отказа или флаг bTMPFAIL определения временного отказа установлен в 1 во время прерывания, если рассматриваемое транспортное средство находится в состоянии остановки, состояние остановки сохраняется, и если рассматриваемое транспортное средство находится в состоянии движения автомобиль останавливается с помощью автоматического торможения.
[0075] На этапе S35 после поддержания состояния остановки на этапе S34 определяется, удовлетворяет ли флаг bFAIL подтвержденного отказа выражению bFAIL=1. Если ДА (bFAIL=1), процесс переходит к этапу S38, а если НЕТ (bFAIL=0), процесс переходит к этапу S36.
[0076] На этапе S36, после определения, что bFAIL=0 на этапе S35, считывается флаг bTMPFAIL определения временного отказа, и процесс переходит к этапу S37.
[0077] На этапе S37, после считывания флага bTMPFAIL определения временного отказа на этапе S36, определяется, удовлетворяет ли флаг bTMPFAIL определения временного отказа выражению bTMPFAIL=1. Если ДА (bTMPFAIL=1), процесс переходит к этапу S38, а если НЕТ (bTMPFAIL=0), процесс возвращается к этапу S21.
[0078] На этапе S38, после определения, что bFAIL=1 на этапе S35, или определения, что bTMPFAIL=1 на этапе S37, управление автоматической парковкой запрещается или отключается, и процесс переходит к END. Таким образом, запуск управления автоматической парковкой с человеком/без человека запрещен до выбора запуска режима автоматической парковки с человеком/без человека. После того, как выбран запуск режима автоматической парковки с человеком/без человека, но до выдачи команды парковочной блокировки, управление автоматической парковкой с человеком/без человека отключается.
[0079] Действия описаны ниже. «Действие процесса диагностики отказов», «действие процесса управления автоматической парковкой», «действие управления автоматической парковкой» и «характерное действие управления автоматической парковкой» будут описаны отдельно в отношении действий первого варианта осуществления.
[0080] [Действие процесса диагностики отказов]
Сначала будет описано действие процесса диагностики отказов системы А управления парковкой по проводам на основе блок-схемы последовательности операций на фиг.3.
[0081] Если система А управления парковкой по проводам находится в нормальном состоянии, последовательность операций, которая переходит с этапа S1 → этап S2 → этап S3 → этап S4 → этап S6 → этап S7 → этап S8 в блок-схеме последовательности операций на фиг.3 повторяется. Таким образом, флаг bFAIL подтвержденного отказа и флаг bTMPFAIL определения временного отказа остаются равными 0.
[0082] Если диагностируется, что привод 71 парковки имеет неисправность, которая не может быть устранена с течением времени (подтвержденный отказ), такую как механическая неисправность или отказ отключения/короткого замыкания, процесс переходит от этапа S1 → этап S2 → этап S9 → этап S15 в блок-схеме последовательности операций на фиг. 3. На этапе S9 флаг подтвержденного отказа (bFAIL) системы А управления парковкой по проводам устанавливается на bFAIL=1. На этапе S15, основываясь на том факте, что bFAIL=1 установлен на этапе S9, запускается прерывание блок-схемы основной последовательности операций, показанной на фиг.4.
[0083] Следовательно, если система А управления парковкой по проводам диагностирована как имеющая неисправность, которая не будет устранена с течением времени (подтвержденный отказ), устанавливается bFAIL=1. По этой причине меры по отказоустойчивости предпринимаются немедленно, запрещая управление автоматической парковкой или отключая управление посредством прерывания к основной процедуре, показанной на фиг. 4.
[0084] Будет описана последовательность действий для диагностики неисправности, которая будет устранена с течением времени (временный отказ) из-за повышения температуры мотора или температуры аккумулятора привода 71 парковки или тому подобного. Если диагностируется временный отказ, в то время как определяется, что значение счетчика временных отказов < порог определения отказов, последовательность операций переходит с этапа S1 → этап S2 → этап S3 → этап S4 → этап S5 → этап S7 → этап S8 в блок-схеме на фиг. 3 повторяется. То есть флаг bTMPFAIL определения временного отказа остается равным 0.
[0085] Затем, если определяется на этапе S7, что значение счетчика временных отказов ≥ порога определения отказов, с течением времени от начала диагностики временного отказа, процесс переходит от этапа S7 к этапу S10, а на этапе S10 - флаг определения временного отказа (bTMPFAIL) установлен в bTMPFAIL=1. После этого, если нормальное состояние не восстанавливается, процесс переходит с этапа S11 на этап S15. На этапе S15, на основании того факта, что bTMPFAIL=1 установлен на этапе S10, инициируется прерывание блок-схемы основной последовательности операций, показанной на фиг. 4.
[0086] Следовательно, если система A управления парковкой по проводам диагностирована с временным отказом, и временный отказ поддерживается в течение предписанного периода времени, устанавливается bTMPFAIL=1. Следовательно, управление автоматической парковкой разрешено для системы A управления парковкой по проводам, в которой диагностирован временный отказ, до истечения установленного периода времени. Однако по истечении установленного периода времени для системы A управления парковкой по проводам, у которой диагностирован временный отказ, предпринимаются отказоустойчивые меры, запрещающие управление автоматической парковкой или выключение управления посредством прерывания основной программы, показанной на фиг. 4.
[0087] Затем, даже когда нормальное состояние восстанавливается после того, как установлено bTMPFAIL=1, в то время как определяется, что значение счетчика восстановления нормального состояния < порога определения нормального восстановления, процесс переходит с этапа S10 на этап S11 → этап S12 → этап S13 → этап S15. По этой причине отказоустойчивые меры предпринимаются посредством прерывания основной процедуры, показанной на фиг. 4.
[0088] С другой стороны, когда нормальное состояние восстанавливается после того, как установлено bTMPFAIL=1, и определяется, что значение счетчика восстановления нормального состояния ≥ порога определения нормального восстановления, процесс переходит с этапа S10 на этап S11 → этап S12 → этап S13 → этап S14 → ВОЗВРАТ. Таким образом, на этапе S14 значение счетчика временных отказов очищается, и исходное состояние восстанавливается с помощью флага определения временного отказа (bTMPFAIL), переписываемого с bTMPFAIL=1 в bTMPFAIL=0.
[0089] Поэтому, даже если система A управления парковкой по проводам диагностируется как временный отказ и устанавливается bTMPFAIL=1, когда подтверждается, что система A управления парковкой по проводам восстановлена в нормальное состояние, bTMPFAIL=1 перезаписывается на bTMPFAIL=0. По этой причине управление автоматической парковкой, которое было запрещено или отключено, восстанавливается до обычного управления автоматической парковкой посредством прерывания основной процедуры, показанной на фиг. 4.
[0090] [Действие процесса управления автоматической парковкой]
Действие процесса управления автоматической парковкой посредством управления отказоустойчивым прерыванием будет теперь описано на основе блок-схемы последовательности операций на фиг. 4.
[0091] Когда выбран режим автоматической парковки с человеком/без человека, и в подпрограмме отсутствует процесс прерывания, процесс переходит от этапа S21 → этап S22 → этап S23 в блок-схеме последовательности операций на фиг.4. На этапе S22 определяется зона парковки, и на следующем этапе S23 ожидается операция запуска для автоматической парковки. Затем, когда условия для начала движения с человеком/без человека в направлении парковочной зоны удовлетворяются и начинается управление автоматической парковкой, процесс переходит с этапа S23 на этап S24 → этап S25 → этап S26. На этапе S25 начинается движение при парковке, и на этапе S26 определяется, остановлено ли транспортное средство в зоне парковки. Если транспортное средство не остановлено в зоне парковки, последовательность операций, которая переходит от этапа S25 → этап S26, повторяется, и если определяется, что транспортное средство остановлено в зоне парковки, процесс переходит к этапу S27. На этапе S27 команда парковочной блокировки выводится на контроллер 33 PBW.
[0092] Следовательно, когда движение при парковке начинается с помощью управления автоматической парковкой, а рассматриваемое транспортное средство останавливается в зоне парковки посредством движения при парковке, команда парковочной блокировки выводится из блока 32c управления автоматической парковкой в контроллер 33 PBW. В контроллере 33 PBW путем выдачи команды выполнения парковочной блокировки на основе команды парковочной блокировки на привод 71 парковки парковочная стойка 77 зацепляется с парковочной шестерней 78, тем самым входя в состояние парковочной блокировки.
[0093] Когда флаг bFAIL подтвержденного отказа или флаг bTMPFAIL определения временного отказа установлен на «1» в процессе диагностики отказов системы А управления парковкой по проводам, показанном на фиг.3, запускается отказоустойчивое управление посредством прерывания. В это время разрешенная область обработки прерывания устанавливается равной периоду во время управления автоматической парковкой с момента, предшествующего определению, что запуск режима автоматической парковки с человеком/без человека был выбран на этапе S21, до тех пор, пока не будет выведена команда парковочной блокировки на этапе S27.
[0094] Если bFAIL=1 установлено, и прерывание запускается во время движения, процесс переходит от этапа S31 к этапу S32 → этап S33 → этап S34 → этап S35 → этап S38 → END. Если установлено bFAIL=1 и прерывание запускается, когда транспортное средство остановлено, процесс переходит от этапа S31 к этапу S32 → этап S34 → этап S35 → этап S38 → END.
[0095] Следовательно, если имеется прерывание из-за установки bFAIL=1 перед началом управления в режиме автоматической парковки с человеком/без человека, запуск управления автоматической парковкой с человеком/без человека запрещается. С другой стороны, если имеется прерывание из-за установки bFAIL=1 после начала управления в режиме управления автоматической парковкой с человеком/без человека , но до выдачи команды парковочной блокировки, состояние управления для управления автоматической парковкой с человеком/без человека, пока автомобиль остановлен, выключается.
[0096] Если bTMPFAIL=1 установлено, и прерывание запускается во время движения, процесс переходит от этапа S31 к этапу S32 → этап S33 → этап S34 → этап S35 → этап S36 → этап S37 → этап S38 → END. Если bTMPFAIL=1 установлено, и прерывание запускается, когда транспортное средство остановлено, процесс переходит от этапа S31 к этапу S32 → этап S34 → этап S35 → этап S36 → этап S37 → этап S38 → END.
[0097] Следовательно, если имеется прерывание из-за установки bTMPFAIL=1 перед началом управления в режиме автоматической парковки с человеком/без человека, запуск управления автоматической парковкой с человеком/без человека запрещается. С другой стороны, если имеется прерывание из-за установки bTMPFAIL=1 после начала управления в режиме автоматической парковки с человеком/без человека, но перед выводом команды парковочной блокировки, состояние управления для управления автоматической парковкой с человеком/без человека, пока автомобиль остановлен, выключается.
[0098] [Действие управления автоматической парковкой]
Сначала будет описан предшествующий уровень техники управления автоматической парковкой в транспортных средствах, оборудованных системой управления парковкой по проводам, которая автоматически включает парковочную блокировку после завершения автоматической парковки в целевом положении остановки.
[0099] При выполнении управления для остановки транспортного средства в целевом положении остановки посредством управления автоматической парковкой водитель понимает, что парковочная блокировка будет автоматически задействована после завершения автоматической парковки. Тот факт, что водитель понимает, что парковочная блокировка автоматически включается, вследствие предубеждения водителя таким образом, имеет первостепенное значение. Из-за осознания водителем, если автоматическая парковка завершена в состоянии, в котором имеется неисправность или отказ функции автоматического включения парковочной блокировки, водитель не замечает состояние, в котором парковочная блокировка не включена, даже если парковочная блокировка не была включена автоматически. Следовательно, если водитель внезапно коснется педали акселератора или если водитель выходит из транспортного средства в наклонной зоне парковки, транспортное средство может начать движение.
[0100] Ситуация, в которой транспортное средство перемещается в целевое положение остановки, и парковочная блокировка не может быть задействована из-за состояния отказа, в котором парковочная блокировка не может быть задействована после завершения автоматической парковки, является такой же, как и в функции полностью автоматической парковки, которая вызывает припаркованное транспортное средство посредством операции без человека. Таким образом, существует вероятность того, что транспортное средство вызывается посредством вождения без человека, даже если парковочная блокировка не может быть задействована в конечном целевом положении остановки.
[0101] Напротив, в первом варианте осуществления отказы, при которых парковочная блокировка не может быть задействована, постоянно отслеживаются во время процесса диагностики отказов системы А управления парковкой по проводам, показанной на фиг.3. В процессе управления автоматической парковкой, показанном на фиг. 4, прерывание разрешается из любой позиции обработки в пунктирной рамке на фиг. 4. По этой причине достигается следующее отказоустойчивое управление.
[0102] (A) Если подтвержденный отказ, при котором парковочная блокировка не может быть включена, диагностируется (bFAIL=1), или диагностируется, что существует вероятность возникновения отказа, при котором парковочная блокировка не может быть включена (bTMPFAIL=1) до запуска управления автоматической парковкой, управление автоматической парковкой запрещено.
[0103] (B) Если диагностируется подтвержденный отказ, при котором парковочная блокировка не может быть включена (bFAIL=1), или диагностируется, что существует вероятность возникновения отказа, при котором парковочная блокировка не может быть включена (bTMPFAIL=1), во время управления автоматической, парковкой транспортное средство тормозится и останавливается, и управление автоматической парковкой останавливается. В это время также возможно установить в положение N диапазона, чтобы избежать передачи мощности привода. Кроме того, в системе с функцией автоматического стояночного тормоза также можно автоматически тянуть стояночный тормоз.
[0104] (C) Аналогично, во время управления автоматической парковкой без человека в зоне парковки или управления автоматическим выездом из зоны парквоки (управление вызовом транспортного средства из зоны парковки), если существует вероятность того, что транспортное средство в конечном итоге не может быть остановлено и передано водителю в состоянии парковочной блокировки, управление автоматической парковкой не запускается.
[0105] Посредством принятия такой конфигурации отказоустойчивого управления можно решить проблему, которая возникает, когда управление автоматической парковкой отменяется в середине управления автоматической парковкой в состоянии, в котором парковочная блокировка не может быть включена. Таким образом, можно предотвратить возникновение ситуации, в которой, даже если парковочная блокировка не включена, водитель предполагает, что включение парковочной блокировки было завершено, и касается педали акселератора, тем самым внезапно запуская транспортное средство. Что касается движения транспортного средства от целевого положения остановки, возможны случаи, в которых целевая зона парковки/остановки наклонена. То есть, когда транспортное средство остановлено в целевом положении остановки на наклонной дороге без включенной парковочной блокировки и оставлено для работы водителем, если водитель выходит из транспортного средства или водитель не находится на борту, существует возможность что транспортное средство начнет движение по наклонной дороге. Если отказоустойчивое управление сконфигурировано в качестве меры последующего действия после того, как обнаружен отказ, из-за которого парковочная блокировка не может быть включена после достижения целевого положения остановки, транспортное средство будет иметь возможность начать движение после достижения целевого положения остановки до выполнения меры последующего действия.
[0106] [Характерное действие управления автоматической парковкой]
В первом варианте осуществления определяется, будет ли возникать неисправность системы, в которой система А управления парковкой по проводам не работает нормально во время управления автоматической парковкой. Если до запуска управления автоматической парковкой определено, что может возникнуть неисправность системы, запуск управления автоматической парковкой не разрешается.
[0107] Таким образом, выполняется отказоустойчивое управление, при котором запуск управления автоматической парковкой не разрешается на основании определения возникновения неисправности системы. Таким образом, когда возникновение неисправности системы определяется до того, как начато управление автоматической парковкой, управление автоматической парковкой может быть предотвращено от прерывания до его завершения из-за неисправности.
[0108] В первом варианте осуществления, если неисправность системы является временным отказом, который будет разрешен с течением времени, запуск управления автоматической парковкой разрешается после устранения временного отказа.
[0109] То есть временные отказы, которые будут устранены с течением времени, рассматриваются отдельно от подтвержденных отказов, которые не будут устранены с течением времени, и, в случае временных отказов, остается способ восстановления системы в нормальное состояние, когда временный отказ устранен. Соответственно, если неисправность системы является временным отказом, который будет устранен с течением времени, становится возможным перезапустить управление автоматической парковкой, даже если управление автоматической парковкой временно переводится в режим ожидания.
[0110] В первом варианте осуществления неисправность системы представляет собой отказ, при котором система А управления парковкой по проводам не может задействовать парковочную блокировку. Если возник отказ, при котором парковочная блокировка не может быть включена, до того, как будет запущено управление включена парковкой, запуск управления автоматической парковкой запрещается.
[0111] Например, если управление автоматической парковкой запускается во время отказа, при котором парковочная блокировка не может быть включена, водитель предполагает, что парковочная блокировка была автоматически включена во время завершения управления автоматической парковкой. В результате, если водитель непреднамеренно касается педали акселератора в целевом положении остановки или заданное целевое положение остановки находится на уклоне, транспортное средство может начать движение из целевого положения остановки. Напротив, если определено возникновение отказа, при котором парковочная блокировка не может быть включена, запуск самого управления автоматической парковкой запрещен. Таким образом, когда происходит отказ, при котором парковочная блокировка не может быть включена, можно предотвратить начало движения транспортного средства из целевого положения остановки.
[0112] В первом варианте осуществления, если возникновение отказа определяется после того, как управление автоматической парковкой запущено, и до того, как автоматическая парковка была завершена, состояние удержания остановки посредством тормозной остановки подтверждается, после чего управление автоматической парковкой выключается.
[0113] Например, если возникновение отказа определяется во время управления автоматической парковкой, транспортное средство может двигаться из положения, в котором возникновение отказа определяется, из-за наката, если управление автоматической парковкой немедленно отключается. Напротив, в настоящем варианте осуществления состояние удержания остановки посредством тормозной остановки подтверждается, после чего управление автоматической парковкой выключается. Таким образом, если возникновение отказа определяется во время управления автоматической парковкой, управление автоматической парковкой отключается в безопасном состоянии, в котором транспортное средство останавливается в положении, где определяется возникновение отказа.
[0114] В первом варианте осуществления управление автоматической парковкой имеет функцию управления для выполнения управления автоматической парковкой посредством движения без человека и для автоматического включения парковочной блокировки, когда автоматическая парковка была завершена в целевом положении остановки. Если возникновение неисправности, при которой парковочная блокировка не может быть включена, определяется до того, как будет начато управление автоматической парковкой посредством движения без человека, запуск управления автоматической парковкой посредством движения без человека запрещается.
[0115] Таким образом, даже когда выполняется управление автоматической парковкой посредством движения без человека, водитель предполагает, что парковочная блокировка был автоматически включена во время завершения управления автоматической парковкой. Следовательно, если целевое положение остановки находится на уклоне, существует вероятность того, что транспортное средство без человека, для которого невозможно ожидать быстрого торможения, начнет случайно двигаться. В отличие от этого, если определено возникновение отказа, при котором парковочная блокировка не может быть включена, запуск управления автоматической парковкой посредством движения без человека запрещается. Соответственно, когда происходит отказ, при котором парковочная блокировка не может быть включена, можно предотвратить начало движения транспортного средства из целевого положения остановки в управлении автоматической парковкой посредством движения без человека.
[0116] Эффекты описаны далее. Следующие эффекты могут быть получены с помощью способа управления автоматической парковкой и устройства управления автоматической парковкой для гибридного транспортного средства FF согласно первому варианту осуществления.
[0117] (1) Предусмотрена система А управления парковкой по проводам, в которой парковочная блокировка автоматически включается, когда автоматическая парковка была завершена в целевом положении остановки с помощью управления автоматической парковкой. В этом способе управления автоматической парковкой для транспортного средства (гибридное транспортное средство FF) определяется, возникнет ли неисправность системы, при которой система А управления парковкой по проводам не работает нормально во время управления автоматической парковкой. Если до запуска управления автоматической парковкой определено, что может произойти неисправность системы, запуск управления автоматической парковкой не разрешается (фиг. 4). Следовательно, можно обеспечить способ управления автоматической парковкой для транспортного средства (гибридное транспортное средство FF), который предотвращает прерывание управления автоматической парковкой до его завершения из-за неисправности, когда до начала управления автоматической парковкой определяется возникновение неисправности системы.
[0118] (2) Если неисправность системы является временным отказом, который будет разрешен с течением времени, запуск управления автоматической парковкой разрешается после устранения временного отказа (этап S14 на фиг.3). Следовательно, в дополнение к эффекту (1), если неисправность системы является временным отказом, который будет устранен с течением времени, становится возможным перезапустить управление автоматической парковкой, даже если управление автоматической парковкой временно переводится в режим ожидания.
[0119] (3) Неисправность системы - это неисправность, при которой система А управления парковкой по проводам не может включать парковочную блокировку. Если возникла неисправность, при которой парковочная блокировка не может быть включена, до того, как будет запущено управление автоматической парковкой, запуск управления автоматической парковкой запрещается (фиг. 4). Следовательно, в дополнение к эффекту (1) или (2), когда происходит отказ, при котором не может быть включена парковочная блокировка, можно предотвратить начало движения транспортного средства из целевого положения остановки.
[0120] (4) Если возникновение отказа определяется после запуска управления автоматической парковкой и до того, как автоматическая парковка была завершена, состояние удержания остановки посредством тормозной остановки подтверждается, после чего управление автоматической парковкой выключается (фиг. 4). Следовательно, в дополнение к эффекту (3), если возникновение отказа определяется во время управления автоматической парковкой, управление автоматической парковкой отключается в безопасном состоянии, в котором транспортное средство останавливается в положении, в котором определяется возникновение ошибки.
[0121] (5) Управление автоматической парковкой имеет функцию управления для выполнения управления автоматической парковкой посредством движения без человека и для автоматического включения парковочной блокировки, когда автоматическая парковка была завершена в целевом положении остановки. Если возникновение неисправности, при которой парковочная блокировка не может быть включена, определяется до того, как будет начато управление автоматической парковкой посредством движения без человека, запуск управления автоматической парковкой посредством движения без человека запрещается (фиг. 4). Следовательно, в дополнение к эффектам (1) - (4), когда происходит отказ, при котором не может быть включена парковочная блокировка, можно предотвратить начало движения транспортного средства из целевого положения остановки при управлении автоматической парковкой посредством движения без человека.
[0122] (6) Обеспечены контроллер автоматической парковки (блок 33c управления автоматической парковкой), который выполняет управление автоматической парковкой, и контроллер управления парковкой по проводам (контроллер 33 PBW), который включен в систему A управления парковкой по проводам, в которой парковочная блокировка автоматически включается, когда автоматическая парковка завершена в целевом положении остановки с помощью управления автоматической парковкой. В устройстве управления автоматической парковкой для транспортного средства (гибридное транспортное средство FF) контроллер управления парковкой по проводам (контроллер 33 PBW) имеет блок обработки диагностики отказов (фиг. 3), который определяет, будет ли возникать неисправность системы, при которой система A управления парковкой по проводам не работает нормально во время управления автоматической парковкой. Контроллер автоматической парковки (блок 33c управления автоматической парковкой) имеет блок обработки отказоустойчивого управления (S31-S38 на фиг. 4), который не позволяет запускать управление автоматической парковкой, если до того, как управление автоматической парковкой запускается, определено, что может возникнуть неисправность системы. Следовательно, возможно предоставить устройство управления автоматической парковкой для транспортного средства (гибридное транспортное средство FF), в котором, когда возникновение неисправности системы определяется до того, как начато управление автоматической парковкой, управление автоматической парковкой может быть предотвращено от прерывания из-за неисправности до его завершения.
[0123] Способ управления автоматической парковкой и устройство управления автоматической парковкой согласно настоящему раскрытию были описаны выше на основе первого варианта осуществления. Тем не менее, конкретные конфигурации не ограничиваются этим первым вариантом осуществления, и различные модификации и дополнения к конструкции могут быть сделаны без отклонения от объема изобретения согласно каждому пункту формулы изобретения.
[0124] В первом варианте осуществления был представлен пример, в котором контроллер 33 PBW имеет блок обработки управления отказоустойчивого управления, а блок 33c управления автоматической парковкой имеет блок обработки управления автоматической парковкой, включающий в себя отказоустойчивое управление. Однако блок обработки отказоустойчивого управления и блок обработки управления автоматической парковкой, включающий в себя отказоустойчивое управление, могут быть назначены одному контроллеру автоматической парковки.
[0125] В первом варианте осуществления был представлен пример, в котором управление автоматической парковкой посредством движения с человеком и управление автоматической парковкой посредством движения без человека осуществляется блоком 33c управления автоматической парковкой. Однако блок управления автоматической парковкой может осуществлять только управление автоматической парковкой в зоне парковки посредством движения с человеком или может осуществлять управление автоматической парковкой в зоне парковки и управление автоматическим выездом из зоны парковки посредством движения без человека.
[0126] В первом варианте осуществления был представлен пример, в котором способ управления автоматической парковкой и устройство управления автоматической парковкой согласно настоящему раскрытию применяются к гибридному транспортному средству FF, снабженному блоком управления автоматической парковкой в качестве одного средства управления содействием при вождении. Однако способ управления автоматической парковкой и устройство управления автоматической парковкой согласно настоящему раскрытию не ограничиваются гибридным транспортным средством FF и могут применяться к гибридному транспортному средству, электрическому транспортному средству или транспортному средству с двигателем, имеющим различные режимы вождения. Вкратце, настоящее изобретение может быть применено к любому транспортному средству, оборудованному системой управления парковкой по проводам, в которой автоматически включается парковочная блокировка, как только автоматическая парковка завершается в целевом положении остановки посредством управления автоматической парковкой.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Способ оценки собственного положения и устройство оценки собственного положения
Способ дистанционного управления транспортным средством и устройство дистанционного управления транспортным средством

