Результат интеллектуальной деятельности: ЭЛЕКТРООБОРУДОВАНИЕ АВТОМОБИЛЯ ИЛИ АВТОПОЕЗДА ИЗ ТЯГАЧА И, ПО МЕНЬШЕЙ МЕРЕ, ОДНОГО ПРИЦЕПА
Вид РИД
Изобретение
Изобретение относится к электрооборудованию автомобиля или автопоезда из тягача и, по меньшей мере, одного прицепа, согласно ограничительной части п. 1 формулы.
Электрооборудование автомобиля известно из документа ЕР 0999117 А2. При этом предусмотрено, что в случае неисправности компонента системы управления, в частности рулевого рычага, отдельные колеса целенаправленно притормаживаются для поддержания управляемости автомобиля. Благодаря этому отказоустойчивость при выходе из строя компонента системы рулевого управления повышается за счет того, что предпринимается попытка, по меньшей мере, частичной замены вышедшего из строя управляющего действия данного компонента системы рулевого управления путем создания момента рыскания посредством целенаправленного торможения отдельных колес. Чтобы повысить отказоустойчивость, резервным является электропитание комбинированного тормозного и рулевого устройства в виде дополнительной аккумуляторной батареи. Кроме того, также колесные модули, в которых размещены тормозные и рулевые актуаторы, располагают соответственно собственным энергоаккумулятором. При этом электронные блоки управления рулевым управлением и торможением, а также источник энергии выполнены полностью резервными, т.е. все электронные системные компоненты и источник энергии представлены соответственно, по меньшей мере, вдвое. За счет этого выхода из строя одного электронного системного компонента или источника энергии соответственно еще исправный системный компонент или источник энергии полностью выполняет требуемую функцию.
Недостаток этого известного выполнения системы заключается в относительно сложном монтаже и высоких затратах на компоненты и всю систему. Из-за этого такие концепции подходят для серийного производства лишь условно. Кроме того, при этом необходимо гарантировать, чтобы в резервных системах одновременно не возникало никаких неисправностей. Данные для электрического устройства рулевого управления и торможения вводятся водителем.
С другой стороны, с давнего времени частично существуют системы помощи водителю, такие как противобуксовочная система (ASR), система автономного экстренного торможения (AEBS), система адаптивного круиз-контроля (ACC) и система динамической стабилизации (ESP), с помощью которых тормозные вмешательства могут происходить автоматически и независимо от водителя, чтобы обеспечить предписания безопасности, например, определенное минимальное расстояние до впереди идущего автомобиля, определенное минимальное тормозное действие, а также определенную минимальную устойчивость при движении.
Кроме того, для будущего движения автомобилей запланированы концепции, которые позволят им перемещаться в системе общественного транспорта также полностью без участия водителя («автопилот»). При этом несколько автомобилей должны с автоматическим управлением двигаться друг за другом на определенном расстоянии, которое меньше заданного безопасного расстояния («платунинг»). Это возможно лишь в том случае, если за счет подходящей коммуникации между автомобилями они могут тормозить все одновременно и с одинаковым замедлением.
Поэтому в рамках таких (частично) автономных концепций необходимо, чтобы электрическое тормозное устройство могло электронным путем получать и реализовывать команды торможения, а именно даже тогда, когда в электронных устройствах управления или в электрике возникла неисправность. Поэтому требуется отказоустойчивое управление тормозным устройством, так что при возникновении неисправностей в тормозной системе основная функция «торможение» может быть гарантирована, по меньшей мере, в течение определенного времени даже без (участия) водителя, пока не будет достигнуто надежное состояние системы, например, по меньшей мере, остановка автомобиля или состояние парковки с длительно затянутыми тормозами.
У изготовленных до сих пор серийно электронных тормозных систем или тормозных систем с электронным регулированием тормозного давления (EBS) их электронное устройство управления торможением при возникновении неисправности в электрическом рабочем тормозном контуре (например, при выходе из строя источника электроэнергии или самого электронного устройства управления торможением) отключается и переключается на чисто резервное пневмоуправление посредством, по меньшей мере, одного пневматического рабочего тормозного контура, с помощью которого, однако, только водитель может затормозить автомобиль за счет срабатывания рабочего тормозного исполнительного органа. Такая система не подходит для описанного выше (частично) автономного или автоматизированного движения (автопилот), поскольку при возникновении такой неисправности больше невозможны никакие автоматизированно управляемые тормозные вмешательства.
Родовое электрооборудование известно из DE 102014013756 В3, причем оно включает в себя рабочее тормозное устройство, управляемое электронным устройством управления торможением и приводимое в действие средой под давлением, и систему помощи водителю или автопилотное устройство, которая/которое автоматически управляет рабочим тормозным устройством или регулирует его независимо от водителя в соответствии с предписанием тормозного действия, причем в электронное устройство управления торможением интегрировано, по меньшей мере, одно устройство регулирования буксования при торможении, причем электронное устройство управления торможением снабжается электроэнергией от первого источника электроэнергии, причем предусмотрено, по меньшей мере, одно дополнительное к электронному устройству управления торможением электронное устройство управления, которое снабжается электроэнергией от второго источника электроэнергии, независимого от первого источника электроэнергии электронного устройства управления торможением и которое управляет электромагнитным клапанным устройством, с чьей помощью можно подавать тормозное давление в колесные тормозные актуаторы, причем при обнаружении неисправности или выхода из строя первого источника электроэнергии и/или электронного устройства управления торможением дополнительное электронное устройство управления управляется системой помощи водителю или автопилотным устройством в соответствии с заданным тормозным действием, чтобы осуществить резервное торможение находящегося в движении автомобиля или автопоезда за счет подачи тормозного давления в колесные тормозные актуаторы. Однако это резервное торможение происходит без регулирования буксования (ABS), в результате чего, прежде всего, на проезжих частях с небольшим коэффициентом трения возникает относительно длинный тормозной путь.
Задачей изобретения является усовершенствование описанного выше электрооборудования автомобиля таким образом, чтобы резервное торможение могло происходить с как можно меньшим тормозным путем, однако без необходимых для этого больших затрат. Кроме того, должен быть создан также автомобиль с таким электрооборудованием.
Эта задача решается посредством технического решения, охарактеризованного признаками пунктов 1 и 20 формулы изобретения.
Изобретение относится к электрооборудованию автомобиля или автопоезда из тягача и, по меньшей мере, одного прицепа, причем электрооборудование включает в себя рабочее тормозное устройство, электрически управляемое электронным устройством управления торможением и приводимое в действие средой под давлением, и систему помощи водителю или автопилотное устройство, которая/которое автоматически управляет рабочим тормозным устройством или регулирует его независимо от водителя в соответствии с предписанием тормозного действия, причем в электронное устройство управления торможением интегрировано, по меньшей мере, одно устройство регулирования буксования при торможении, причем электронное устройство управления торможением снабжается электроэнергией из первого источника электроэнергии, причем предусмотрено, по меньшей мере, одно дополнительное к электронному устройству управления торможением электронное устройство управления, которое снабжается электроэнергией из второго источника электроэнергии, независимого от первого источника электроэнергии электронного устройства управления торможением, и которое управляет электромагнитным клапанным устройством, с чьей помощью в колесные тормозные актуаторы подается тормозное давление, причем, по меньшей мере, при обнаружении неисправности или выхода из строя первого источника электроэнергии и/или электронного устройства управления торможением дополнительное электронное устройство управления управляется системой помощи водителю или автопилотным устройством в соответствии с предписанием тормозного действия, чтобы осуществить резервное торможение находящегося в движении автомобиля или автопоезда за счет подачи тормозного давления в колесные тормозные актуаторы.
При этом дополнительное электронное устройство управления представляет собой «дополнительное» электронное устройство управления по отношению к электронному устройству управления торможением, поскольку оно имеется отдельно и дополнительно по отношению к нему. С другой стороны, дополнительное электронное устройство управления не является дополнительным устройством управления в рабочем тормозном клапанном устройстве, поскольку оно имеется в нем только один раз.
Под автопилотным устройством далее следует понимать устройство, которое управляет тормозным устройством автомобиля или регулирует его без участия водителя, в частности в зависимости от условий режима движения. То же относится к системе помощи водителю, например, к АСС (Adaptive Cruise Control – адаптивный круиз-контроль), посредством которой поддерживается постоянным расстояние до впереди идущего автомобиля или постоянной его относительная скорость, ассистенту экстренного торможения (AEBS) или системе динамической стабилизации (ESP), с помощью которых, по меньшей мере, тормозные вмешательства происходят автоматически и независимо от водителя, чтобы обеспечить предписания безопасности, например, определенное минимальное расстояние до впереди идущего автомобиля, определенное минимальное тормозное действие, а также определенную минимальную устойчивость при движении.
Под предписанием тормозного действия системой помощи водителю или автопилотным устройством следует понимать предписание любого заданного параметра, например, предписание тормозного давления, предписание тормозной силы или предписание тормозного момента.
Вызванное дополнительным электронным устройством управления в ответ на предписание тормозного действия системой помощи водителю или автопилотным устройством торможение автомобиля, например, за счет впуска воздуха в колесные тормозные пневмоцилиндры, является резервным торможением в том смысле, что оно не может быть больше инициировано электрическим рабочим тормозным контуром или электронным устройством управления торможением, поскольку там имеет место выход из строя или неисправность.
При выходе из строя или неисправности первого источника энергии и/или электронного устройства управления торможением, помимо регулирующих алгоритмов ABS, как правило, выходят из строя также датчики ABS, с помощью которых обычно работает регулирование буксования при торможении, так что тогда резервному торможению пришлось бы обойтись, собственно, без такого регулирования буксования. Однако, согласно изобретению, найдена возможность, обеспечивающая даже при таком резервном торможении небольшой тормозной путь с небольшими затратами на резервирование.
Согласно изобретению, прежде всего, предусмотрено снабжаемое электроэнергией из второго источника электроэнергии сенсорное устройство, с помощью которого во время резервного торможения может быть обнаружено чрезмерное буксование и которое отличается также от обычной сенсорики ABS, которая из-за неисправности или выхода из строя больше не работоспособна. Это сенсорное устройство включает в себя датчики, которые, как правило, уже имеются в современных автомобилях и потому больше не должны быть дополнительно предусмотрены, и имеет различные варианты.
Сенсорное устройство подключено предпочтительно к шине данных, к которой подключены также дополнительное электронное устройство управления и электронное устройство управления торможением, с тем, чтобы данные датчиков сенсорного устройства, описанные ниже более подробно, можно было подавать в дополнительное электронное устройство управления.
Согласно первому варианту, сенсорное устройство содержит, по меньшей мере, один первый датчик, который подает в дополнительное электронное устройство управления первое значение, представляющее продольное ускорение или продольное замедление автомобиля или автопоезда, и, по меньшей мере, один второй датчик, который подает в дополнительное электронное устройство управления второе значение, представляющее тормозное давление, причем дополнительное электронное устройство управления выполнено таким образом, что во время резервного торможения оно обнаруживает чрезмерное буксование при наличии превышающего допустимое или заданное отклонение отклонения отношения, соотношения или связи между первым и вторым значениями от ожидаемого или заданного отношения, ожидаемого или заданного соотношения или ожидаемой или заданной связи между первым и вторым значениями. При этом, например, первый датчик может включать в себя, например, датчик продольного ускорения, а второй датчик – датчик давления.
Поэтому в первом варианте используется имеющаяся корреляция между введенным в колесные тормозные актуаторы тормозным давлением и результирующим из этого продольным ускорением автомобиля, чтобы обнаружить недопустимую блокировку колес при торможении. При этом физическая основа в том, что при незаблокированных колесах параметры тормозное давление и продольное замедление автомобиля почти пропорциональны, а при заблокированных при торможении колесах – нет, поскольку тогда, несмотря на возрастающее тормозное давление, продольное замедление автомобиля остается постоянным или даже немного уменьшается. Корреляция или коэффициент пропорциональности между обоими параметрами возникает, по меньшей мере, за счет массы автомобиля или автопоезда.
Согласно второму варианту, сенсорное устройство содержит, по меньшей мере, один третий датчик, который подает в дополнительное электронное устройство управления третье значение, представляющее фактическую угловую скорость автомобиля или автопоезда, а также, по меньшей мере, один четвертый датчик, который подает в дополнительное электронное устройство управления четвертое значение, представляющее заданную угловую скорость автомобиля или автопоезда, причем дополнительное электронное устройство управления выполнено таким образом, что во время резервного торможения оно обнаруживает чрезмерное буксование при превышении заданного порога за счет разности между третьим и четвертым значениями. При этом третий датчик может включать в себя датчик угловой скорости, а четвертый датчик – датчик угла поворота рулевого колеса.
Поэтому во втором варианте чрезмерное превышение заданной угловой скорости, которая, например, зависит от угла поворота рулевого колеса, за счет фактической угловой скорости, которая определяется, например, датчиком угловой скорости, является доказательством наличия чрезмерной блокировки при возможном движении по кривой во время резервного торможения, поскольку она ведет к уменьшению сил бокового увода, которые, в свою очередь, вызывают увеличение угловой скорости.
Согласно третьему варианту, сенсорное устройство содержит, по меньшей мере, один пятый датчик, который подает в дополнительное электронное устройство управления пятое значение, представляющее фактическую частоту вращения выходного вала коробки передач автомобиля или автопоезда, и, по меньшей мере, один шестой датчик, который подает в дополнительное электронное устройство управления шестое значение, представляющее частоту вращения, по меньшей мере, одного из ведомых колес автомобиля или автопоезда, причем дополнительное электронное устройство управления выполнено таким образом, что во время резервного торможения оно обнаруживает чрезмерное буксование при наличии превышающего допустимое или заданное отклонение отклонения отношения, соотношения или связи между пятым и шестым значениями от ожидаемого или заданного отношения, ожидаемого или заданного соотношения или ожидаемой или заданной связи между пятым и шестым значениями.
Поэтому в третьем варианте использована обычная, т.е. постоянная при отсутствии блокировки или при лишь очень малой блокировке, связь между частотой вращения выходного вала коробки передач, который приводит тогда ведущие и заторможенные колеса автомобиля или тягача автопоезда, и частотой вращения, по меньшей мере, одного из ведомых, однако заторможенных колес автомобиля или автопоезда. Если же, например, возникает чрезмерная блокировка ведущего моста, то частота вращения выходного вала коробки передач падает, тогда как частота вращения колес на ведомом мосту не уменьшается, например, из-за локально более высокого там коэффициента трения. Следовательно, значимое изменение обычной связи или обычного отношения обоих параметров является доказательством наличия блокировки заднего моста. По сравнению с блокировкой ведомого переднего моста блокировка ведущего заднего моста является более неблагоприятным случаем, поскольку тогда автомобиль склонен к излишней поворачиваемости.
Согласно четвертому варианту, сенсорное устройство содержит, по меньшей мере, один седьмой датчик, который подает в дополнительное электронное устройство управления седьмое значение, представляющее продольную качку автомобиля или автопоезда при торможении, а также восьмой датчик, который подает в дополнительное электронное устройство управления восьмое значение, представляющее продольное ускорение или продольное замедление автомобиля или автопоезда, причем дополнительное электронное устройство управления выполнено таким образом, что во время резервного торможения оно обнаруживает чрезмерное буксование при наличии превышающего допустимое или заданное отклонение отклонения отношения, соотношения или связи между седьмым и восьмым значениями от ожидаемого или заданного отношения, ожидаемого или заданного соотношения или ожидаемой или заданной связи между седьмым и восьмым значениями. При этом седьмой датчик может включать в себя, например, непосредственно или косвенно регистрирующий прогиб рессор автомобиля или автопоезда датчик, в частности датчик-радар или датчик-камеру, который может обнаруживать продольную качку автомобиля по отношению к окружающему пространству в качестве эталона, поскольку оно не движется в вертикальном направлении. Восьмой датчик может включать в себя, например, датчик продольного ускорения.
В основе четвертого варианта лежит идея, заключающаяся в том, что при чрезмерной блокировке при торможении эффекты продольной качки автомобиля менее выражены благодаря меньшим тогда тормозным силам, чем при небольшой блокировке или ее отсутствии.
Согласно пятому варианту, сенсорное устройство содержит, по меньшей мере, один девятый датчик, который подает в дополнительное электронное устройство управления девятое значение, представляющее фактическое боковое движение автомобиля или автопоезда, а также, по меньшей мере, один десятый датчик, который подает в дополнительное электронное устройство управления десятое значение, представляющее заданное боковое движение автомобиля или автопоезда, причем дополнительное электронное устройство управления выполнено таким образом, что во время резервного торможения оно обнаруживает чрезмерное буксование при превышении заданного порога за счет разности между девятым и десятым значениями. При этом девятый датчик может включать в себя датчик-камеру и/или датчик-радар, а десятый датчик – датчик скорости и датчик угла поворота рулевого колеса. С помощью такого датчика-камеры и/или датчика-радара можно обнаружить тогда боковое движение автомобиля или автопоезда по отношению к окружающему пространству в качестве эталона.
В основе пятого варианта лежит идея, заключающаяся в том, что при чрезмерной блокировке боковые движения автомобиля при возможном движении по кривой во время резервного торможения, которые характеризуются тогда, например, определенным углом бокового увода и/или углом рыскания, лежат выше порога, поскольку тогда силы бокового увода заторможенных колес относительно малы, и вследствие этого возникают также бóльшие боковые движения. С помощью, например, датчика угла поворота рулевого колеса регистрируется по сравнению с этим заданное боковое движение.
Согласно шестому варианту, сенсорное устройство содержит, по меньшей мере, один одиннадцатый датчик, который подает в дополнительное электронное устройство управления (FBM-ECU) одиннадцатое значение, представляющее частоту вращения, по меньшей мере, одного из заторможенных колес автомобиля или автопоезда, и, по меньшей мере, один двенадцатый датчик, который подает в дополнительное электронное устройство управления (FBM-ECU) двенадцатое значение, представляющее продольное ускорение или продольное замедление автомобиля или автопоезда, причем дополнительное электронное устройство управления (FBM-ECU) выполнено таким образом, что оно формирует основанную на одиннадцатом и двенадцатом значениях эталонную скорость автомобиля, которая, в частности, во время резервного торможения опирается на двенадцатое значение, или чья достоверность подтверждается, и обнаруживает чрезмерное буксование при наличии превышающего допустимое отклонение отклонения отношения, соотношения или связи между одиннадцатым значением и эталонной скоростью автомобиля.
С помощью одного или нескольких описанных выше вариантов сенсорных устройств, не затронутых выходом из строя или неисправностью первого источника электроэнергии или электронного устройства управления торможением, чрезмерное буксование во время резервного торможения обнаруживается поэтому дополнительным электронным устройством управления, которое также не затронуто выходом из строя или неисправностью первого источника электроэнергии или электронного устройства управления торможением.
Согласно изобретению, дополнительное электронное устройство управления выполнено далее таким образом, что после того, как во время резервного торможения оно обнаружило чрезмерное буксование, оно за счет управления электромагнитным клапанным устройством подает в колесные тормозные актуаторы тормозное давление, соответствующее тормозному действию, которое меньше предписания тормозного действия системой помощи водителю или автопилотным устройством. В частности, поэтому в случае чрезмерного буксования во время резервного торможения в колесные тормозные актуаторы подается тормозное давление, которое меньше тормозного давления, соответствующего предписанию тормозного действия, и, в частности, предписанию тормозного действия системой помощи водителю или автопилотным устройством.
Благодаря этой мере чрезмерное буксование устраняется аналогично традиционной, однако больше не работоспособной ABS, а при возможном во время резервного торможения движении по кривой повышаются силы бокового увода.
Благодаря независимому от первого источника электроэнергии второму источнику электроэнергии не в последнюю очередь возникает высокая отказоустойчивость рабочего тормозного устройства.
Зависимые пункты формулы раскрывают предпочтительные варианты осуществления изобретения.
Особенно предпочтительно уменьшение тормозного действия включает в себя по сравнению с предписанием тормозного действия смену между понижением и повышением тормозного давления за счет управления электромагнитным клапанным устройством посредством дополнительного электронного устройства управления. Другими словами, аналогично традиционной системе ABS происходит модуляция тормозного давления, например, за счет периодических повышения и понижения тормозного давления, причем в среднем по времени по сравнению с предписанием тормозного действия возникает меньшее тормозное давление.
Согласно одному варианту, дополнительное электронное устройство управления выполнено таким образом, что в рамках первого режима обнаружения оно записывает в память первое значение тормозного давления, при котором впервые возникло чрезмерное буксование в пределах первого режима обнаружения, в качестве первого обнаруженного критического значения тормозного давления, а затем за счет управления электромагнитным клапанным устройством периодически повышает тормозное давление только до первого обнаруженного критического значения тормозного давления, после чего снова понижает. Следовательно, дополнительное электронное устройство управления в рамках повышения тормозного давления «запоминает» «угловое» тормозное давление, при котором тогда впервые возникла чрезмерная блокировка. Кроме того, это первое значение тормозного давления меньше тормозного давления, которое соответствует предписанию тормозного действия системой помощи водителю или автопилотным устройством. Это первое значение тормозного давления представляет собой тогда также меру имеющегося в данный момент коэффициента трения поверхности проезжей части. С помощью хранящегося в памяти первого значения тормозного давления можно повысить тогда скорость адаптации тормозного давления, используя это первое значение тормозного давления в качестве нового предписания тормозного давления.
Согласно одному варианту этой меры, дополнительное электронное устройство управления выполнено таким образом, что оно по времени после первого режима обнаружения осуществляет, по меньшей мере, один второй режим обнаружения, чтобы записать в память второе значение тормозного давления, при котором впервые возникло чрезмерное буксование в пределах второго режима обнаружения, в качестве второго обнаруженного критического значения тормозного давления, а затем за счет управления электромагнитным клапанным устройством периодически повышать тормозное давление только до этого второго обнаруженного критического значения тормозного давления, после чего снова понижать. Это предпочтительно, в частности, тогда, когда еще во время резервного торможения коэффициент трения проезжей части через некоторое время изменяется, причем это изменение коэффициента трения представлено тогда вторым значением тормозного давления.
Предпочтительно дополнительное электронное устройство управления может быть выполнено таким образом, что в том случае, если оно во время резервного торможения обнаруживает чрезмерное буксование за счет наличия превышающего допустимое или заданное отклонение отклонения отношения, соотношения или связи между первым и вторым значениями от ожидаемого или заданного отношения, ожидаемого или заданного соотношения или ожидаемой или заданной связи между первым и вторым значениями, оно за счет управления электромагнитным клапанным устройством периодически сначала повышает тормозное давление до максимально соответствующего предписанию тормозного действия системой помощи водителю до тех пор, пока замедление автомобиля больше не будет возрастать и не примет максимальное значение, а затем снова понижает тормозное давление, пока замедление автомобиля снова не уменьшится. Тогда тормозное давление, при котором замедление автомобиля больше не возрастает и принимает максимальное значение, представляет собой предел давления или устойчивости, при котором продольное замедление «насыщено».
Далее дополнительное электронное устройство управления может быть выполнено таким образом, что во время резервного торможения оно обнаруживает чрезмерное буксование также на основе данных, которые еще до возникновения неисправности или выхода из строя переданы на дополнительное электронное устройство управления и записаны в память. Такая передача может происходить, например, посредством шины данных, к которой подключены дополнительное электронное устройство управления, а также датчики и/или электронные устройства управления.
При этом данные могут включать в себя, по меньшей мере, одни из следующих данных: массу автомобиля или автопоезда, осевые нагрузки и/или распределение осевых нагрузок автомобиля или автопоезда, коэффициент трения проезжаемой автомобилем или автопоездом проезжей части. В частности, дополнительное электронное устройство управления может быть тогда выполнено таким образом, что во время резервного торможения оно согласует по мостам тормозное давление в зависимости от осевых нагрузок.
Предпочтительно дополнительное электронное устройство управления может быть также выполнено таким образом, что оно обнаруживает наличие собственного регулирования буксования в присоединенном к тягачу автопоезда прицепе и в этом случае во время резервного торможения привлекает регулирование буксования прицепа также для торможения автопоезда с регулированием буксования. Тогда блок управления торможением вместе с интегрированным регулированием буксования электроэнергией предпочтительно также из второго источника электроэнергии. В этом случае во время резервного торможения, например, часть общей тормозной силы может взять на себя тормозная система прицепа. Благодаря этой мере предпочтительно дополнительно уменьшается тормозной путь.
Согласно одному варианту, дополнительное электронное устройство управления может быть выполнено таким образом, что во время резервного торможения оно дополнительно осуществляет активирование ретардера и/или снижение приводной мощности приводного двигателя автомобиля или тягача автопоезда. Также эта мера приводит к предпочтительно дополнительному уменьшению тормозного пути.
Согласно другой мере, электронное устройство управления торможением может быть выполнено таким образом, что за счет собственного контроля оно обнаруживает возникновение затрагивающей его самого неисправности или затрагивающего его самого выхода из строя и/или возникновение неисправности или выхода из строя первого источника электроэнергии и сообщает об этом дополнительному электронному устройству управления, или дополнительное электронное устройство управления может быть выполнено таким образом, что оно обнаруживает возникновение неисправности или выхода из строя первого источника электроэнергии и/или электронного устройства управления торможением, или также дополнительная электроника, отличная от электронного устройства управления торможением и от дополнительного электронного устройства управления, может быть выполнена таким образом, что она обнаруживает неисправность или выход из строя первого источника электроэнергии и/или электронного устройства управления торможением и сообщает об этом дополнительному электронному устройству управления. На основе этого сообщения дополнительное электронное устройство управления инициирует тогда резервное торможение.
Особенно предпочтительно в качестве рабочего тормозного устройства предусмотрено электропневматическое рабочее тормозное устройство, в частности электронная тормозная система или тормозная система с электронным регулированием тормозного давления, которая включает в себя электропневматическое рабочее тормозное клапанное устройство, электронное устройство управления торможением, электропневматические модуляторы и пневматические колесные тормозные актуаторы, причем электронное устройство управления торможением электрически управляет электропневматическими модуляторами, чтобы индивидуально для каждого колеса, каждого моста или каждой стороны вырабатывать пневматические тормозные давления или тормозные управляющие давления для пневматических колесных тормозных актуаторов, и, причем электропневматическое рабочее тормозное клапанное устройство содержит рабочий тормозной исполнительный орган и внутри, по меньшей мере, одного электрического рабочего тормозного контура, по меньшей мере, один электрический канал, по меньшей мере, с одним приводимым в действие рабочим тормозным исполнительным органом электрическим датчиком тормозных значений для зависимой от срабатывания рабочего тормозного исполнительного органа выдачи исполнительных сигналов, а также принимающее исполнительные сигналы дополнительное электронное устройство управления, которое в зависимости от исполнительных сигналов подает в электронное устройство управления торможением сигналы запроса на торможение, а также внутри, по меньшей мере, одного пневматического рабочего тормозного контура, по меньшей мере, один пневматический канал, в котором за счет срабатывания рабочего тормозного исполнительного органа вследствие запроса на торможение водителем, по меньшей мере, один управляющий поршень рабочего тормозного клапанного устройства нагружается первым исполнительным усилием и непосредственно или косвенно управляет содержащим впускное и выпускное седла двухседельным клапаном рабочего тормозного клапанного устройства, чтобы вырабатывать пневматические тормозные давления или тормозные управляющие давления для пневматических колесных тормозных актуаторов, и причем предусмотрены включающие в себя дополнительное электронное устройство управления электропневматического рабочего тормозного клапанного устройства средства для создания второго исполнительного усилия независимо от запроса на торможение водителем, которое при наличии независимого от желания водителя запроса на торможение действует, по меньшей мере, на один управляющий поршень по отношению к первому исполнительному усилию равно- или встречно-направленно.
Поэтому в качестве предпочтительного варианта осуществления изобретения предложено модифицировать всегда имеющееся в электропневматическом рабочем тормозном устройстве пневматическое или электропневматическое рабочее тормозное клапанное устройство или так и так имеющийся там ножной тормозной модуль так, чтобы оно/он, во-первых, обеспечивало/обеспечивал определение положения педали тормоза, а, во-вторых, могло/мог модифицировать выданное, по меньшей мере, одним пневматическим каналом рабочего тормозного клапанного устройства тормозное давление независимо от нажатия педали тормоза.
Такое тогда «активное» пневматическое или электропневматическое рабочее тормозное клапанное устройство или такой «активный» ножной тормозной модуль как синоним раскрыто/раскрыт в публикации DE 102014112014.0 заявителя, причем ее раскрытое в этом отношении содержание полностью включено в данную заявку.
Пневматическая часть этого «активного» ножного тормозного модуля функционирует, как рабочий тормозной клапан пневматического рабочего тормозного устройства и в ответ на нажатие педали тормоза вырабатывает одно- или многоконтурно пневматические тормозные давления или тормозные управляющие давления, по меньшей мере, в одном пневматическом рабочем тормозном контуре электропневматического рабочего тормозного устройства. По меньшей мере, если электропневматическим рабочим тормозным устройством является тормозная система с электронным регулированием или электронным регулированием тормозного давления (EBS), активный ножной тормозной модуль содержит сенсорику для определения запроса на торможение водителем в виде электрического датчика тормозных значений. Эта сенсорика является составной частью электрического канала «активного» ножного тормозного модуля или электрического рабочего тормозного контура электропневматического рабочего тормозного устройства и передает ему в исправном режиме запрос водителя на рабочее торможение, который подает его через педаль рабочего тормоза.
Чтобы даже в случае неисправности в электрическом канале рабочего тормозного клапанного устройства или в электрическом рабочем тормозном контуре электропневматического рабочего тормозного устройства реализовать запрос водителя на торможение, в электронно регулируемой тормозной системе (EBS) введенные, по меньшей мере, в один пневматический рабочий тормозной контур тормозные давления или тормозные управляющие давления используются в качестве резерва.
«Активный» ножной тормозной модуль содержит, кроме того, электрический канал и электронное устройство управления давлением или регулирования давления, с помощью которого модуль, по меньшей мере, в одном пневматическом рабочем тормозном контуре может модифицировать, в частности повышать или без участия водителя вырабатывать тормозные давления или тормозные управляющие давления. Таким образом, модуль способен реализовывать запросы на торможение системы помощи водителю или автопилотного устройства.
Чтобы сделать, в целом, отказоустойчивым выполнение выработанного автопилотным устройством или системой помощи водителю запрос на торможение, электронное устройство управления торможением электропневматического рабочего тормозного устройства снабжается электроэнергией из первого источника электроэнергии, а дополнительное электронное устройство управления «активного» ножного тормозного модуля – из второго источника электроэнергии.
Сигналы запроса на торможение от автопилотного устройства подаются, в частности, например, по общей шине данных не только в электронное устройство управления торможением электропневматического рабочего тормозного устройства, но и в дополнительное электронное устройство управления «активного» ножного тормозного модуля или «активным» ножным тормозным модулем, например, на шине данных, к которой подключены оба устройства, и «считываются» дополнительным электронным устройством управления.
В случае выхода из строя или неисправности первого источника электроэнергии или электрического рабочего тормозного контура электропневматического рабочего тормозного устройства «активный» ножной тормозной модуль (FBM) обнаруживает это, например, за счет отсутствия сообщений от электропневматического рабочего тормозного устройства на шине данных или за счет явного сообщения о неисправности от электронного устройства управления торможением электропневматического рабочего тормозного устройства. Возможно также, чтобы электропневматическое рабочее тормозное устройство или его электронное устройство управления торможением контролировалось другим блоком управления и сообщало затем «активному» ножному тормозному модулю о неисправности или выходе из строя. Этот другой блок управления может быть также частью автопилотного устройства или системы помощи водителю.
Тогда «активный» ножной тормозной модуль вместо электропневматического рабочего тормозного устройства может реализовать предписания торможения автопилотным устройством или системой помощи водителю.
Поскольку такой ножной тормозной модуль или такое рабочее тормозное клапанное устройство может выдавать переменное давление между минимальным и максимальным давлениями, которое соответствует давлению в ресивере сжатого воздуха, обеспечивается также то, что тормозное действие в случае неисправности оказывается не меньше, чем в нормальном случае, поскольку в нормальном случае может быть запрошено также тормозное давление, максимально соответствующее давлению в ресивере сжатого воздуха.
Как уже было указано, предпочтительно, по меньшей мере, один управляющий поршень рабочего тормозного клапанного устройства нагружается не только первым исполнительным усилием при наличии независимого от желания водителя запроса на торможение, но и дополнительно вторым исполнительным усилием или вместо первого исполнительного усилия – вторым исполнительным усилием, которое по отношению к первому исполнительному усилию действует, по меньшей мере, на один управляющий поршень параллельно и равно- или встречно-направленно и вырабатывается независимо от запроса на торможение водителем на основе выданных дополнительным электронным устройством управления рабочего тормозного клапанного устройства электрических сигналов.
Другими словами, первое, зависимое от запроса на торможение водителем исполнительное усилие и/или при наличии независимого от желания водителя запроса на торможение второе исполнительное усилие действуют параллельно, причем второе исполнительное усилие создается на основе выданных дополнительным электронным устройством управления рабочего тормозного клапанного устройства электрических сигналов. Следовательно, либо оба исполнительных усилия (первое и второе) сообща, либо каждое исполнительное усилие по отдельности само по себе без наличия соответственно другого исполнительного усилия способны приводить в действие управляющий поршень и, тем самым, также двухседельный клапан. При этом оба исполнительных усилия могут действовать на управляющий поршень как равно-направленно, т.е. в том же направлении, так и встречно-направленно, т.е. в противоположном направлении.
Первое, созданное в зависимости от запроса на торможение водителем исполнительное усилие действует, по меньшей мере, на один управляющий поршень всегда в одном направлении, что обусловлено направлением срабатывания тормозного исполнительного органа в направлении открывания выпускного седла двухседельного клапана для впуска воздуха, по меньшей мере, в один рабочий тормозной контур, так что термины «равно-направленно» и «встречно-направленно» четко определены по отношению к направлению действия первого исполнительного усилия. При этом ясно, что в случае отсутствующего ввиду запроса на торможение водителем первого исполнительного усилия направление его действия, по меньшей мере, на один управляющий поршень является лишь воображаемым, чтобы можно было указать эталон для параллельного тогда ему направления действия второго исполнительного усилия.
Таким образом, возникают новые возможности управления электропневматическим рабочим тормозным устройством за счет того, что, по меньшей мере, один пневматический рабочий тормозной контур, помимо приведения в действие водителем, может автоматически приводиться в действие также электрически или электронно и, тем самым, без участия водителя при наличии запроса на торможение. Управление, по меньшей мере, одним пневматическим рабочим тормозным контуром электропневматического рабочего тормозного устройства или его регулирование дополнительным электронным устройством управления рабочего тормозного клапанного устройства может происходить тогда посредством любых электрических управляющих сигналов любой системы автомобиля или любого «авторитета», которая/который может генерировать запрос на торможение, в частности посредством системы помощи водителю или автопилотного устройства.
Достигаемые за счет этого преимущества заключаются, в принципе, в том, что внутри собственно пневматического канала электропневматического рабочего тормозного клапанного устройства или ножного тормозного модуля независимо от запроса на торможение водителем могут автоматически вырабатываться тормозные давления или тормозные управляющие давления для пневматических рабочих тормозных контуров.
Таким образом, в частности, еще в рабочем тормозном клапанном устройстве, т.е. в центральном месте и для всех подключенных к рабочему тормозному клапанному устройству пневматических рабочих тормозных контуров, соответствующие тормозные давления могут вырабатываться без участия или вмешательства водителя, в частности, тогда, когда была обнаружена неисправность или был обнаружен выход из строя электрического рабочего тормозного контура электропневматического рабочего тормозного устройства, в частности его первого источника электроэнергии, электронного устройства управления торможением или электропневматических модуляторов. За счет этого даже в случае неисправности или выхода из строя электрического рабочего тормозного контура в распоряжении имеется другой электрический рабочий тормозной контур, которым тогда управляет дополнительное электронное устройство управления рабочего тормозного клапанного устройства.
Таким образом, создана предпосылка того, чтобы за счет незначительных изменений электропневматического рабочего тормозного клапанного устройства из уровня техники расширить его функциональность предпочтительно в смысле автоматического, без участия водителя управления тормозами за счет дополнения его электронного устройства управления алгоритмами управления или регулирования, посредством которых тогда второе исполнительное усилие может создаваться с помощью преимущественно дополнительно предусматриваемого электрогидравлического или электропневматического актуатора, управляемого электронным устройством управления ножного тормозного модуля.
Снабженное таким рабочим тормозным клапанным устройством рабочее тормозное устройство реагирует тогда при автоматическом (постороннем) приведении в действие, как при запросе на торможение водителем, например, в отношении распределения тормозных сил или управления тормозами прицепа. Рабочее тормозное клапанное устройство подходит тогда, в частности, для описанного выше (частично) автономного движения автомобиля в колонне, поскольку при возникновении неисправности в электрическом рабочем тормозном контуре автоматическое управляемое торможение еще возможно за счет, по меньшей мере, одного пневматического рабочего тормозного контура.
Также выполняется допуск на неисправности, законодательно требуемый в отношении автомобильных тормозов. Поскольку, кроме того, создается дополнительный, по меньшей мере, частично электрический рабочий тормозной контур, электрическая часть которого простирается до актуатора, создающего второе исполнительное усилие, присутствуют тормозные контуры, выполненные иначе по сравнению, по меньшей мере, с одним пневматическим рабочим тормозным контуром, причем тогда уменьшается опасность того, что оба тормозных контура выйдут из строя из-за идентичной или аналогичной неисправности. Следовательно, с помощью дополнительного (частично) электрического рабочего тормозного контура можно выдавать максимальную, имеющуюся в распоряжении тормозную мощность, поскольку, по меньшей мере, один пневматический рабочий тормозной контур может использовать полное давление из ресивера сжатого воздуха. Не в последнюю очередь имеющиеся электропневматические рабочие тормозные устройства могут быть оснащены просто путем замены рабочего тормозного клапанного устройства без необходимости изменения кабельной разводки или пневморазводки труб в автомобиле.
Важно также, что водитель может в любое время перемодулировать вызванный вторым исполнительным усилием запрос на торможение за счет приведения в действие тормозного исполнительного органа рабочего тормозного клапанного устройства, поскольку тогда параллельно второму исполнительному усилию, по меньшей мере, к одному управляющему поршню прикладывается основанное на запросе на торможение водителем первое исполнительное усилие, которое при определенных обстоятельствах больше второго исполнительного усилия и также направлено навстречу ему.
В некоторых случаях может быть желательно или необходимо, чтобы пожелание водителя на торможение, представленное первым, действующим на управляющий поршень исполнительным усилием, перемодулировать за счет создания соответственно большого и встречно действующего второго исполнительного усилия, например, тогда, когда водителю при описанном выше движении в колонне на небольшом расстоянии до впереди и позади идущих автомобилей внезапно захотелось бы совершить полное торможение, в результате чего возникла бы опасность наезда.
Особенно предпочтительно такое второе исполнительное усилие создается также в том случае, если была обнаружена неисправность или был обнаружен выход из строя электрического рабочего тормозного контура электропневматического рабочего тормозного устройства и если имеет место запрос на торможение. Такой неисправностью или таким выходом из строя может быть затронуто, в частности, электронное устройство управления торможением, по меньшей мере, один электропневматический модулятор моста или же электрический канал электропневматического рабочего тормозного клапана. Возможен также выход из строя первого источника электроэнергии электрического рабочего тормозного контура.
Понятно, что в случае нескольких пневматических каналов рабочего тормозного клапанного устройства вторым исполнительным усилием могут нагружаться больше, чем единственный, управляющих поршней или также только единственный управляющий поршень, который тогда передает второе исполнительное усилие на дополнительный исполнительный поршень.
Предпочтительно средства для создания второго исполнительного усилия включают в себя, по меньшей мере, один электрический, электрогидравлический или электропневматический актуатор. При этом возможны также варианты, в которых второе исполнительное усилие создается с помощью электропневматического, электрогидравлического или электромеханического актуатора, например, электромагнитного клапана, электродвигателя и т.д., который тогда непосредственно или косвенно воздействует, по меньшей мере, на один управляющий поршень рабочего тормозного клапанного устройства.
В частности, средства для создания второго исполнительного усилия могут включать в себя, по меньшей мере, одно электропневматическое электромагнитное клапанное устройство, которое под управлением дополнительным электронным устройством управления выдает для генерирования второго исполнительного усилия, по меньшей мере, одно пневматическое управляющее давление, от которого зависит второе исполнительное усилие. По сигналу дополнительного электронного устройства управления рабочего тормозного клапанного устройства выдается, поэтому управляющее давление, которое непосредственно или косвенно действует, по меньшей мере, на один управляющий поршень. Это управляющее давление создает тогда, по меньшей мере, на одном управляющем поршне второе исполнительное усилие. Особенно предпочтительно второе исполнительное усилие создается, поэтому электропневматически с наиболее оптимальным использованием уже имеющихся условий на рабочем тормозном клапанном устройстве.
Также выданное, по меньшей мере, одним электромагнитным клапанным устройством управляющее давление может быть измерено посредством сенсорики и за счет сравнения с заданным значением отрегулировано в дополнительном электронном устройстве управления, причем сенсорика и электромагнитное клапанное устройство вместе с дополнительным электронным устройством управления образуют регулятор для регулирования пневматического управляющего давления. С помощью опционального здесь регулирования второго исполнительного усилия или одного из связанных с ним описанных параметров можно повысить точность настройки тормозного давления.
Для реализации такой функции регулирования могут быть предусмотрены сенсорные средства, с помощью которых измеряется действующее, по меньшей мере, на один управляющий поршень второе исполнительное усилие, происходящий от второго исполнительного усилия исполнительный путь, по меньшей мере, одного управляющего поршня и/или создающий второе исполнительное усилие параметр в качестве фактического параметра, а также регулировочные и исполнительные средства, с помощью которых фактический параметр сравнивается с заданным параметром с целью регулирования.
При этом пневматическое управляющее давление может подаваться, по меньшей мере, в одну управляющую камеру электропневматического рабочего тормозного клапанного устройства, которая ограничена, по меньшей мере, одним управляющим поршнем, причем управляющая камера расположена таким образом, что она при впуске воздуха вызывает, по меньшей мере, на одном управляющем поршне равно- или встречно-направленное по отношению к первому исполнительному усилию второе исполнительное усилие.
Согласно одному варианту, также автопилотное устройство или система помощи водителю может без участия водителя подавать предписание тормозного действия непосредственно или косвенно в дополнительное электронное устройство управления, причем предписание тормозного действия создается в зависимости от условий движения. Как уже сказано выше, для этого, по меньшей мере, электронное устройство управления торможением и дополнительное электронное устройство управления могут быть подключены к шине данных.
Под такими условиями движения следует понимать все мыслимые условия и обстоятельства, которые возникают в режиме движения автомобиля или автопоезда, например, рыскание, качение и/или продольная качка, торможение или ускорение, расстояние до впереди идущего автомобиля и/или скорость относительно него, а также поведение в состоянии стоянки или парковки.
В частности, пневматическое управляющее давление может подаваться, по меньшей мере, в одну управляющую камеру электропневматического рабочего тормозного клапанного устройства, ограниченную, по меньшей мере, одним управляющий поршнем, причем управляющая камера расположена таким образом, что она при впуске воздуха вызывает, по меньшей мере, на одном управляющем поршне равно- или встречно-направленное по отношению к первому исполнительному усилию второе исполнительное усилие.
Для максимально простой реализации такой функциональности первая управляющая камера может быть расположена по отношению, по меньшей мере, к одному управляющему поршню таким образом, что за счет впуска воздуха в первую управляющую камеру создается равнонаправленное по отношению к первому исполнительному усилию второе, действующее, по меньшей мере, на один управляющий поршень исполнительное усилие. Дополнительно вторая управляющая камера располагается таким образом, что за счет впуска в нее воздуха создается равнонаправленное по отношению к первому исполнительному усилию второе, действующее, по меньшей мере, на один управляющий поршень исполнительное усилие.
При этом может быть предпочтительно предусмотрено, что первая управляющая камера посредством первого электромагнитного клапанного устройства или посредством первого регулятора управляющего давления и вторая управляющая камера независимо от этого выполнены с возможностью впуска или выпуска воздуха посредством второго электромагнитного клапанного устройства или посредством второго регулятора управляющего давления.
Не в последнюю очередь, по меньшей мере, одним управляющим поршнем может быть двойной поршень из двух соединенных поршневым штоком поршней, из которых первый поршень ограничивает первую управляющую камеру, а второй поршень – вторую управляющую камеру, причем первая и вторая управляющие камеры на направленных друг от друга поверхностях ограничивают внутреннюю стенку рабочего тормозного клапанного устройства, через которую герметично проходит поршневой шток.
Изобретение относится также к автомобилю с описанным выше электрооборудованием.
Предпочтительные варианты осуществления изобретения следуют из формулы, описания и чертежей. Названные в преамбуле описания преимущества признаков и комбинаций нескольких признаков приведены лишь в качестве примера и могут оказывать альтернативное или кумулятивное действие без необходимости достижения преимуществ обязательно предложенных вариантов. Другие признаки могут быть взяты из чертежей, в частности изображенных геометрических форм и габаритов нескольких конструктивных элементов по отношению друг к другу, а также их относительного расположения и взаимодействия. Комбинация признаков разных вариантов осуществления изобретения или признаков разных пунктов формулы может также отличаться от выбранной подчиненности пунктов формулы. Это касается также признаков, которые изображены на отдельных чертежах или упоминаются при их описании. Эти признаки могут комбинироваться также с признаками разных пунктов формулы. Точно так же приведенные в формуле признаки могут отпасть для других вариантов осуществления изобретения.
Ниже примеры осуществления изобретения изображены на чертежах и более подробно поясняются в нижеследующем описании. На чертежах представлено следующее:
- фиг. 1: схематичное сечение рабочего тормозного клапанного устройства электропневматического рабочего тормозного устройства автомобиля в соответствии с предпочтительным вариантом осуществления изобретения в положении «движение»;
- фиг. 2: блок-схема предпочтительного варианта электрооборудования автомобиля, включающего в себя электропневматическое рабочее тормозное устройство с рабочим тормозным клапанным устройством из фиг. 1, автопилотное устройство и рулевое управление;
- фиг. 3: упрощенная блок-схема электрооборудования из фиг. 2;
- фиг. 4: рулевое управление в ситуации, когда управляет водитель;
- фиг. 5: рулевое управление в ситуации, когда управляет водитель;
- фиг. 6: рулевое управление в ситуации, когда управляет автопилотное устройство;
- фиг. 7: рулевое управление в ситуации, когда управляют водитель и автопилотное устройство;
- фиг. 8а-8с: варианты электромагнитного клапанного устройства для управления рабочим тормозным клапанным устройством;
- фиг. 9а: диаграмма, на которой в зависимости от времени t нанесено продольное ускорение ах;
- фиг. 9b: соответствующая по времени диаграмме из фиг. 9а диаграмма, на которой в зависимости от времени t нанесено тормозное давление р.
На фиг. 1 изображено схематичное сечение рабочего тормозного клапанного устройства 1 электропневматического рабочего тормозного устройства электрооборудования автомобиля в соответствии с предпочтительным вариантом осуществления изобретения в положении «движение». Под электрооборудованием следует понимать любое автомобильное оборудование, содержащее электрические детали или компоненты.
Для наглядности рабочее тормозное клапанное устройство 1 содержит лишь один пневматический рабочий тормозной контур 132 или пневматический канал 134, однако в действительности – предпочтительно два пневматических рабочих тормозных контура 132 или два пневматических канала 134 (фиг. 2). Дополнительно к пневматическим рабочим тормозным контурам 132 или пневматическим каналам 134 предусмотрен электрический рабочий тормозной контур или электрический канал 130, например, с бесконтактным здесь датчиком перемещений или датчиком 67 тормозных значений для измерения пути срабатывания рабочего тормозного исполнительного органа 10. В случае такого электропневматического рабочего тормозного клапанного устройства 1 говорят также о так называемом ножном тормозном модуле.
Рабочее тормозное клапанное устройство 1 используется предпочтительно в электропневматическом рабочем тормозном устройстве 124 на фиг. 2, которое представляет собой электронную тормозную систему (EBS) с регулированием тормозного давления, чтобы, с одной стороны, в двух последующих пневматических (резервных) рабочих тормозных контурах подавать соответственно пневматическое (резервное) тормозное управляющее давление, а, с другой стороны, в предшествующем электрическом рабочем тормозном контуре зависимый от запроса на торможение электрический сигнал в электронный рабочий тормозной блок управления (EBS/ABS-ECU), а оттуда с возможным согласованием или возможной корректировкой – в подчиненные электропневматические модули 114, 116 регулирования давления, которые в зависимости от этих электрических, представляющих заданные тормозные давления сигналов выдают соответствующее фактическое тормозное давление в колесных тормозных цилиндрах 118, 120 соответствующего моста (передний мости, задний мост).
Такие электропневматические модули 114, 116 регулирования давления достаточно известны и включают в себя наряду с резервным электромагнитным клапаном, который удерживает соответствующее резервное тормозное управляющее давление при исправном электропневматическом тормозном контуре, комбинацию впускного и выпускного электромагнитных клапанов, которая на выходной стороне соединена с релейным клапаном. Дополнительно в такой модуль 114, 116 регулирования давления интегрированы локальный электронный блок управления и датчик давления для измерения выданного релейным клапаном фактического тормозного давления. Измеренное датчиком давления фактическое тормозное давление сравнивается затем с заданным тормозным давлением, которое представлено сигналом, поданным электрическим каналом рабочего тормозного клапанного устройства в модуль 114, 116 регулирования давления, в смысле регулирования давления.
Таким образом, предусмотрено рабочее тормозное клапанное устройство 1 для управления, во-первых, электрическим рабочим тормозным контуром и, по меньшей мере, одним пневматическим рабочим тормозным контуром (резервный тормозной контур) такой электронной тормозной системы (EBS).
Рабочее тормозное клапанное устройство 1 содержит корпус 2, в котором аксиально подвижно установлен толкающий поршень 4 с проходящим через отверстие в крышке корпуса гнездом 6. В гнездо 6 сверху входит толкатель 8, который соединен с рабочим тормозным исполнительным органом 10 в виде ножной тормозной пластины. При нажатии водителем ножной тормозной пластины 10 толкатель 8 вдавливается в гнездо 6, а толкающий поршень 4 движется за счет исполнительного усилия вниз.
Толкающий поршень 4 передает исполнительное усилие, преимущественно через свою пружину сжатия 14, на установленный аксиально подвижно также в корпусе 2 управляющий поршень 12. Последний опирается на внутреннюю стенку 66 посредством своей пружины сжатия 46.
Управляющий поршень 12 через шток 5 толкающего поршня 4 находится в механическом взаимодействии с последним, причем шток 5 соединен с толкающим поршнем 4 и может аксиально упираться в выполненный в виде чашеобразной втулки верхний шток 7 управляющего поршня 12, когда шток 5 достигает дна втулкообразного штока 7 при движении, например, толкающего поршня 4 к управляющему поршню 12 вследствие приведения в действие рабочего тормозного исполнительного органа. С другой стороны, шток 5 может скользить в штоке 7 при движении толкающего поршня 4 от управляющего поршня 12.
На другой стороне управляющего поршня 12 на его нижнем штоке 16 выполнено выпускное седло 32 двухседельного клапана 34, которое герметично прилегает к аксиально подвижно установленному в корпусе 2, чашеобразному и полому затвору 36 двухседельного клапана 34 или приподнимается от него, открывая проходное сечение между рабочей камерой 38 и головным сквозным отверстием в затворе 36, которое ведет к присоединению 40 для выпуска воздуха. Эта ситуация показана на фиг. 1.
Рабочая камера 38 связана с присоединением 42 для пневматического рабочего тормозного контура, к которому подключена ведущая к электропневматическому модулю 114, 116 регулирования давления моста (переднего моста, заднего моста) напорная магистраль 44 и 45 соответственно (фиг. 2). В такой модуль 114, 116 регулирования давления интегрирован резервный электромагнитный клапан, который блокирует направляемое по напорной магистрали 44, 45 давление при исправном электрическом рабочем тормозном контуре относительно подключенного к модулю 114, 116 регулирования давления колесному тормозному цилиндру 118, 120, а при неисправном электрическом рабочем тормозном контуре пропускает его. Для этого он выполнен, например, в виде 2/2-электромагнитного распределителя с обесточенным подпружиненным открытым и запитанным запертым положениями.
Между толкающим поршнем 4 и направленной к нему поверхностью управляющего поршня 12 выполнена управляющая камера 22. При этом в нее впадает присоединение 48 на корпусе 2.
К присоединению 48 подключено выходное присоединение 50 электромагнитного клапанного устройства 52, которое на своем входном присоединении 54 связано с подключенной к ресиверу сжатого воздуха магистралью 56 для давления в ресивере. Далее на рабочем тормозном клапанном устройстве 1 имеется присоединение 58 для ресивера, к которому также подключена магистраль 56 для давления в ресивере, связанная с накопительной камерой 60.
Затвор 36 посредством своей пружины сжатия 62, опирающейся на дно корпуса 2 и внутри затвора 36, прижат к впускному седлу 64 двухседельного клапана 34, которое выполнено на радиально внутреннем краю центрального сквозного отверстия другой внутренней стенки 66 корпуса 2. В приподнятом от впускного седла 64 против действия пружины сжатия 62 состоянии затвора 36 открывается проходное сечение между присоединением 58 для ресивера или накопительной камерой 60 и рабочей камерой 38, которое обеспечивает течение находящегося под давлением сжатого воздуха в присоединение 42 для рабочего тормозного контура, т.е. в магистраль для рабочего давления, чтобы впустить воздух в колесные тормозные цилиндры соответствующего моста или соответствующего тормозного контура.
Как уже было указано, на фиг. 1 показано положение «движение» рабочего тормозного клапанного устройства 1, в котором выпускное седло 32 приподнято от затвора 36, а присоединение 42 для рабочего тормозного контура и, тем самым, также его колесные тормозные цилиндры соединены с присоединением 40 для выпуска воздуха. За счет этого из активных пневматических колесных тормозных цилиндров выпущен воздух, и колеса, тем самым, ослаблены.
Электромагнитное клапанное устройство 52, некоторые варианты которого изображены на фиг. 8а-8с, обеспечивает впуск воздуха в первую управляющую камеру 22 и его выпуск из нее и управляется дополнительным электронным устройством управления FBM-ECU, более подробно описанным ниже.
В корпусе 2 в осевой части толкающего поршня 4 преимущественно аксиально друг за другом расположены два резервных, предпочтительно бесконтактных датчика 67 перемещения в виде датчиков тормозных значений для изменения его пути срабатывания или степени срабатывания, который/которая пропорционален/пропорциональна пути срабатывания или степени срабатывания рабочего тормозного исполнительного органа 10. Сигналы этих датчиков 67 перемещения используются, например, в электрическом канале рабочего тормозного клапанного устройства 1 и подаются в дополнительное электронное устройство управления FBM-ECU, которое обрабатывает эти сигналы, делает их за счет этого способными для передачи по шине данных и через интерфейс 13 подает в коммуникационную линию 122, например, шину данных, к которой подключен электронный рабочий тормозной блок управления EBS/ABS-ECU. Следовательно, дополнительное электронное устройство управления FBM-ECU представляет собой (также) электронное устройство обработки сигналов датчиков 67 перемещения.
Дополнительное электронное устройство управления FBM-ECU, первое электромагнитное клапанное устройство 52 и соответствующая кабельная разводка или пневматическая трубная разводка или пневмагистрали образуют вместе с расположенными в корпусе 2 элементами рабочего тормозного клапанного устройства 1 преимущественно конструктивный узел, причем дополнительное электронное устройство управления FBM-ECU, первое электромагнитное клапанное устройство 52 и соответствующая кабельная разводка или пневматическая трубная разводка или пневмагистрали могут быть размещены также в собственном корпусе, который тогда прифланцован, например, к корпусу 2.
Когда водитель нажимает рабочий тормозной исполнительный орган 10 рабочего тормозного клапанного устройства 1, что соответствует запросу на торможение водителем, толкающий поршень 4 перемещается вниз, причем его шток 5 прижимается к дну чашеобразной втулки 7, а управляющий поршень 12 также перемещается вниз, пока выпускное седло 32 герметично не прижмется к затвору 36 и, тем самым, не перекроет соединение между присоединением 42 для рабочего тормозного контура и присоединением 40 для выпуска воздуха, так что больше не может происходить дальнейший выпуск воздуха из соответствующих колесных тормозных цилиндров 118, 120.
При дальнейшем нажатии рабочего тормозного исполнительного органа 10 на запрос на торможение водителем затвор 36 с прилегающим к нему выпускным седлом 32 перемещается вниз, отделяясь от впускного седла 34. За счет этого сжатый воздух под давлением в ресивере поступает из накопительной камеры 60 в рабочую камеру 38, а оттуда – в присоединение 42 для рабочего тормозного контура и в соответствующие колесные тормозные цилиндры, чтобы впустить в них воздух и, тем самым, зажать колеса. При этом речь идет о чисто торможении водителем, при котором вследствие исполнительного усилия, прикладываемого водителем к рабочему тормозному исполнительному органу 10 в зависимости от запроса на торможение, к управляющему поршню 12 через пружину сжатия 14 толкающего поршня прикладывается первое исполнительное усилие, которое приводит управляющий поршень 12 в его положение впуска воздуха.
При таком торможении, инициированном чисто за счет запроса на торможение водителем, первое электромагнитное клапанное устройство 52 посредством дополнительного электронного устройства управления FBM-ECU приводится в положение выпуска воздуха, в котором первая управляющая камера 22 сообщена с атмосферой, во избежание эффектов давления, возникающих вследствие расширения первой управляющей камеры 22.
В зависимости от модуляции поданного в управляющую камеру 22 пневматического управляющего давления посредством электромагнитного клапанного устройства 52 можно тогда установить на втором управляющем поршне 12 определенное второе исполнительное усилие, что выражается, в свою очередь, в соответствующей тормозной силе, так что возможно установление любой тормозной силы между нулевым значением и результирующей из давления ресивера в магистралях 56, 57 максимальной тормозной силой. В данном случае второе исполнительное усилие действует, например, равно-направленно и параллельно первому исполнительному усилию. Однако возможно также встречное направление действия второго исполнительного усилия.
Когда в варианте на фиг. 1 без данного запроса на торможение водителем первое электромагнитное клапанное устройство 52 посредством дополнительного электронного устройства управления FBM-ECU приводится в положение впуска воздуха, в первую управляющую камеру 22 подается пневматическое управляющее давление, создающее, в свою очередь, направленное вниз второе исполнительное усилие, которое тогда приводит его, как при описанном приведении в действие водителем, в его положение впуска воздуха.
Кроме того, господствующее в первой управляющей камере 22 управляющее давление воздействует также на толкающий поршень 4 и, тем самым, на рабочий тормозной исполнительный орган 10, что водитель может ощутить по своей ноге, когда она касается рабочего тормозного исполнительного органа 10 (обратное действие педали). Таким образом, водитель может ощутить по своей ноге инициирование автоматического торможения.
Наряду с рабочим торможением, инициированным водителем, и рабочим торможением, инициированным без участия водителя на основе автоматически генерированных сигналов запроса на рабочее торможение, возможно также комбинированное рабочее торможение, которое осуществляется с помощью рабочего тормозного клапанного устройства 1 как по запросу на торможение водителем, так и по автоматически генерированному запросу на торможение. Тогда на управляющий поршень 12, здесь, например, равно-направленно и параллельно, действуют первое исполнительное усилие от запроса на рабочее торможение водителем и второе исполнительное усилие от автоматически генерированного запроса на торможение, в результате чего значения обоих исполнительных усилий на управляющем поршне 12, например, суммируются.
Выданное первым электромагнитным клапанным устройством 52 управляющее давление для первой управляющей камеры 22 может быть подвергнуто регулированию. В этом случае фактическое управляющее давление на выходном присоединении 50 измеряется датчиком давления и посредством дополнительного электронного устройства управления FBM-ECU сравнивается с заданным управляющим давлением путем соответствующего управления первым электромагнитным клапанным устройством 52. Последнее образует тогда вместе с датчиком давления и электронным устройством управления ECU регулятор управляющего давления в управляющей камере 22.
На фиг. 8а-8с изображены примеры электромагнитных клапанных устройств 52а, 52b, 52c или регуляторов 52а, 52b, 52c управляющего давления, как они в предыдущих примерах управляют пневматическим управляющим давлением для управляющей камеры 22 или регулируют его. Для простоты указаны лишь использованные на фиг. 1 ссылочные позиции.
Этим примерам присуще то, что они управляются электронным устройством управления ECU, имеют входное присоединение 54а, 54b, 54с, которое через магистраль 56 для давления в ресивере соединено с ресивером сжатого воздуха, а также выходное присоединение 50а, 50b, 50с, которое находится в соединении или приводится в соединение соответственно с первой 22 или второй 24 управляющей камерой. Далее во всех выполнениях имеются выпуск 100а, 100b, 100с воздуха и датчик 102а, 102b, 102с давления для измерения фактического управляющего давления на выходном присоединении 50а, 50b, 50с, так что в сочетании с соответствующими алгоритмами в электронном устройстве управления ECU, которое сообщает о приложенном к выходному присоединению 50а, 50b, 50с сигнале фактического управляющего давления, возможно или также осуществляется регулирование выданного управляющего давления.
В выполнении на фиг. 8а пропорциональный клапан 104а обеспечивает (пропорционально) выданное в соответствии с электрическим управляющим сигналом управляющее давление на выходном присоединении 50а, причем возможны также впуск и выпуск воздуха. В выполнении на фиг. 8b предусмотрена комбинация впускного и выпускного клапанов из двух электромагнитных 2/2-распределителей 106b, 108b, причем непосредственно соединенный с входным присоединением 54b впускной клапан 106b в обесточенном состоянии замкнут, а в запитанном состоянии разомнут, а выпускной клапан 108b в обесточенном состоянии разомкнут, а в запитанном состоянии замкнут. На фиг. 8с в качестве электромагнитного клапанного устройства 52с используется электромагнитный 3/2-распределитель 110с в качестве воздуховпускного и воздуховыпускного клапана с воздуховпускным и воздуховыпускным положениями в комбинации с электромагнитным 2/2-распределителем 112с в качестве удерживающего клапана, который в своем запертом положении удерживает давление на выходном присоединении 50с.
Такое электромагнитное клапанное устройство 52а, 52b, 52с может использоваться в любом из описанных выше вариантов в комбинации с датчиком 102 давления в качестве регулятора управляющего давления, который включает в себя дополнительно электронное устройство управления FBM-ECU для регулирования приложенного к выходу 50а, 50b, 50с управляющего давления.
На фиг. 2 изображена блок-схема предпочтительного варианта электропневматического рабочего тормозного устройства 124 подходящего для сцепления прицепа тягача с описанным выше рабочим тормозным клапанным устройством 1. Последнее используется там лишь в качестве примера, причем там имеются, например, один электрический и два пневматических рабочих тормозных контура.
Электропневматическое рабочее тормозное устройство 124 и его электронное устройство EBS/ABS-ECU управления торможением снабжается электроэнергией из первого источника 126 электроэнергии, которое является составной частью электрического рабочего тормозного контура и независимым от второго источника 128 электроэнергии, снабжающего электроэнергией, например, рабочее тормозное клапанное устройство 1 и, в частности, его электронное устройство управления FBM-ECU.
В рабочем тормозном клапанном устройстве 1 видны электрический канал 130 для электрического рабочего тормозного контура, пневматический канал 132 переднего моста для его пневматического рабочего тормозного контура и пневматический канал 134 заднего моста для его пневматического рабочего тормозного контура. Видны также напорные магистрали 44, 45, которые подводят господствующее в канале 132 переднего и канале 134 заднего мостов давление к соответствующему модулю 114, 116 регулирования давления, где это давление посредством интегрированного резервного электромагнитного клапана сначала блокируется относительно колесных тормозных цилиндров 118, 120. Приданным заднему мосту модулем 116 регулирования давления является, например, 2-канальный модуль регулирования давления, а переднему мосту придан 1-канальный модуль 114 регулирования давления, который через магистрали для тормозного давления, в которые интегрированы клапаны 138 управления давлением ABS, соединен с колесными тормозными цилиндрами 118 на переднем мосту. В случае недопустимого буксования клапаны управления давлением ABS известным образом управляются электронным устройством EBS/ABS-ECU управления торможением, чтобы согласовать буксование колес переднего моста с допустимым буксованием. Регулирование буксования колес заднего моста происходит посредством тамошнего 2-канального модуля 116 регулирования давления, который через магистрали 137 для тормозного давления соединен с соответствующими колесными тормозными цилиндрами. Для измерения буксования колес на каждом колесе установлены датчики 24 частоты вращения. В электронное устройство EBS/ABS-ECU управления торможением имплементированы стандартные регулирующие программы систем ESP, ASR и ABS.
Преимущественно для обоих рабочих тормозных контуров (передний и задний мосты) предусмотрено по одному собственному ресиверу 140, 142 сжатого воздуха, которые через магистрали 144, 146 для давления в ресивере подключены одной стороной к пневмоканалам 132, 134 рабочего тормозного клапана, а другой стороной – к модулям 114, 116 регулирования давления. Последние включают в себя комбинацию впускного и выпускного клапанов, а также пневматически управляемый ею релейный клапан, причем соответственно в зависимости от управления посредством электронного устройства EBS/ABS-ECU управления торможением из давления в ресивере модулируется тормозное давление, которое подается в магистрали 136, 137 для тормозного давления. Далее в модули 114, 116 регулирования давления и в модуль ТСМ управления прицепа интегрировано по одному датчику давления, который измеряет господствующее фактическое тормозное давление в магистралях 136, 137 и соединительной головке «тормоз» и возвращает в локальные электронные устройства управления, интегрированные в модули 114, 116 регулирования давления и в модуль ТСМ управления прицепа, чтобы можно было известным образом осуществлять регулирование тормозного давления путем сравнения с заданным тормозным давлением.
Через приданную пневматическому тормозному контуру переднего моста напорную магистраль 44 резервно пневматически управляется достаточно известный модуль ТСМ управления прицепа, который приоритетно электрически управляется также электронным устройством EBS/ABS-ECU управления торможением. Кроме того, модуль ТСМ управления прицепа снабжается сжатым воздухом из одного из ресиверов 140 или 142 по магистрали 144 или 146 (на фиг. 2 не показано). С выходной стороны модуль ТСМ управления прицепа соединен с соединительной головкой «тормоз» 148 и соединительной головкой «ресивер» 150 для управления тормозами прицепа известным образом.
Понятно, что модули 114, 116 регулирования давления, модуль ТСМ управления прицепа и клапаны 138 управления давлением ABS соответственно посредством электрической управляющей линии 152 соединены с электронным устройством EBS/ABS-ECU управления торможением.
Кроме того, видны также дополнительное электронное устройство управления FBM-ECU, интегрированное в выполненное на фиг. 1 рабочее тормозное клапанное устройство 1, и первое электромагнитное клапанное устройство 52b, содержащее на фиг. 8b комбинацию 106b, 108b впускного и выпускного клапанов и датчик 102b давления. В данном примере эти компоненты размещены, например, в собственном корпусе, прифланцованном к корпусу рабочего тормозного клапанного устройства 1. Также видны резервные датчики 67 тормозных значений. Дополнительное электронное устройство управления FBM-ECU включает в себя, например, резервные, контролирующие друг друга микропроцессоры 154а, 154b. Таким же образом также электронное устройство EBS/ABS-ECU управления торможением располагает двумя резервными микропроцессорами 156а, 156b. Датчики 24 частоты вращения колес сообщают о соответствующей частоте вращения колеса локальным блокам управления в модулях 114, 116 регулирования давления, которые направляют ее дальше на электронный блок EBS/ABS-ECU управления торможением.
Электрооборудование включает в себя далее электромеханическое рулевое устройство 26, например, со сплошным механическим соединением между рулевым колесом 28 и рулевым механизмом 30 (фиг. 4). Электронный блок управления рулевого устройства 26 связан с шиной 68 данных автомобиля, к которой подключены также электронный блок EBS/ABS-ECU управления торможением, дополнительное электронное устройство управления FBM-ECU и автопилотное устройство 70. Последнее выполнено таким образом, что оно, в том числе, без участия водителя управляет рулевым устройством 26, электропневматическим рабочим тормозным устройством 124 и рабочим тормозным клапанным устройством 1 и его блоками управления и представляет собой, тем самым, также систему помощи водителю. Таким образом, реализованы, по меньшей мере, частично автоматическое управление тормозами и вождением автомобиля, предпочтительно в зависимости от условий движения, например, скорости автомобиля, расстояния до впереди идущего автомобиля и/или скорости относительно него, устойчивости автомобиля, в частности также вместе с прицепом, и т.д. Для этого автопилотное устройство 70 принимает с помощью датчиков (не показаны) касающиеся условия движения данные.
Рулевое устройство 26 снабжается электроэнергией из второго источника 128 электроэнергии, как и, например, автопилотное устройство 70. Модуль ТСМ управления прицепа, электрически управляемый электронным блоком EBS/ABS-ECU управления торможением, соединен одной стороной с соединительной головкой «тормоз» 148, а другой стороной – с соединительной головкой «ресивер» 150, причем к этим соединительным головкам разъемно подключены соответствующие, ведущие к прицепу тормозные магистрали и магистрали ресивера.
Электромеханическое рулевое устройство 26 подробно изображено на фиг. 4. Приложенный водителем через рулевое колесо 28 рулевой момент 76 вводится через рулевой вал 68 в электрический рулевой актуатор 72, образованный, например, электродвигателем. На рулевом валу 68 установлен, кроме того, датчик 74 момента рулевого колеса, который регистрирует приложенный водителем через рулевое колесо 28 рулевой момент и в качестве сигнала момента рулевого колеса подает в неэлектронный здесь рулевой блок управления, подключенный к шине 122 данных (фиг. 2).
Рулевой блок управления может, в принципе, управлять рулевым актуатором 72 в зависимости от зарегистрированного на рулевом колесе 28 рулевого момента 76 для создания на рулевой колонке 68 дополнительного к приложенному водителем рулевому моменту 76 перекрывающего момента. Поэтому рулевое устройство представляет собой здесь, например, так называемое перекрывающее рулевое управление с перекрывающим рулевым моментом. Вместо рулевого момента 76 можно регистрировать посредством датчика угла поворота рулевого колеса также соответствующий угол α поворота рулевого колеса, так что тогда имело бы место перекрывающее рулевое управление с перекрытием угла поворота рулевого колеса.
Однако рулевой актуатор 72 также без участия водителя, т.е. без поворота рулевого колеса 28, может создавать на рулевом валу 68 рулевой момент 82 (фиг. 5). В случае на фиг. 4 рулевой актуатор 72 не подает рулевой момент 82 в рулевой вал 68, так что усилия на ободе рулевого колеса происходят только от созданного водителем рулевого момента 76. На фиг. 4 изображена ситуация, в которой запрос на рулевое управление исходит исключительно от водителя, который соответствующим образом поворачивает рулевое колесо 28.
Рулевой механизм 30 включает в себя здесь предпочтительно гидравлическую сервоподдержку и усиливает рулевой момент 76. Рулевой механизм 30 управляет тогда через рулевую тягу 78 поворотными кулаками 80а, 80b левого и правого передних колес ведущего переднего моста VA, чтобы установить там их углы поворота b1, b2. Задний мост НА здесь преимущественно ведомый.
На фиг. 5 изображена ситуация, в которой действующий на рулевой вал 68 рулевой момент 82 создается исключительно рулевым актуатором 72 на основе его управления электронным рулевым блоком управления. Это управление происходит, например, посредством выданного автопилотным устройством 70 рулевого запроса, который передается по шине 122 данных.
На фиг. 6 изображена ситуация, в которой за счет целенаправленного затормаживания здесь, например, левых колес переднего VA и заднего НА мостов создается момент MBrems,Gier рыскания, который побуждает автомобиль следовать здесь, например, левой криволинейной траектории. Решающими для момента MBrems,Gier рыскания является радиус RLenkroll качения левого переднего колеса, который в комбинации с действующей там тормозной силой FBrems,VA создает тормозной момент FBrems,VA·RLenkroll, а также половина а длины моста, которая в комбинации с тормозной силой FBrems,НA создает тормозной момент FBrems,НA·а. Запрос на рулевое торможение инициируется здесь автопилотным устройством 70 и передается по шине 122 данных на электронный блок EBS/ABS-ECU управления торможением, который вызывает в ответ на это затормаживание обоих колес.
На фиг. 7 изображена ситуация, в которой на приложенный водителем через рулевое колесо 28 к рулевому валу 68 рулевой момент 76 накладывается приложенный рулевым актуатором 72 рулевой момент 82. Кроме того, действует также момента MBrems,Gier рыскания вследствие рулевого торможения. Поэтому здесь показан случай, когда друг на друга наложены изображенные на фиг. 4-6 возможности рулевого управления автомобилем.
На фиг. 3 схематично изображены различные варианты электроснабжения электрических и электронных компонентов электрооборудования автомобиля.
Согласно первому варианту, рулевое устройство 26, а также рабочее тормозное клапанное устройство 1 или его электронное устройство управления FBM-ECU питаются током из второго источника 128 электроэнергии, а электропневматическое рабочее тормозное устройство 124 или его блок EBS/ABS-ECU управления торможением – из первого источника 126 электроэнергии. Соответствующие провода 84, 86 источников энергии обозначены на фиг. 3 сплошными линиями с треугольными стрелками. В качестве опции здесь датчик 67 тормозных значений рабочего тормозного клапанного устройства 1 питается током также из второго источника 128 электроэнергии, как это обозначено штриховой линией 92.
При этом электронное устройство 1 управления торможением электропневматического рабочего тормозного устройства 124 или его электронное устройство управления FBM-ECU выполнено таким образом, что оно обнаруживает выход из строя или неисправность содержащего второй источник 128 электроэнергии второго электрического контура или рулевого устройства 26, причем тогда электронное устройство 1 управления торможением или его электронное устройство управления FBM-ECU управляет электропневматическим рабочим тормозным устройством 124, чтобы оно преобразовывало возможные выданные автопилотным устройством 70 сигналы запроса на рулевое управление в виде индивидуальных для каждого колеса или индивидуальных для каждой стороны тормозных вмешательств в колесные тормозные актуаторы.
Согласно второму варианту, предусмотрен, по меньшей мере, один, снабжаемый электроэнергией из первого источника 126 электроэнергии или из первого электрического контура по обозначенному штриховой линией проводу 94 и приводимый в действие рабочим исполнительным органом 10 датчик 88 электрических сигналов, который при нажатии рабочего исполнительного органа 10 по обозначенному на фиг. 3 штриховой линией сигнальному проводу 90 подает в электронное устройство EBS/ABS-ECU управления торможением электрический исполнительный сигнал. При этом датчик 88 электрических сигналов может быть интегрирован в электропневматическое рабочее тормозное клапанное устройство 1 и образован, в частности, электрическим выключателем.
Согласно третьему варианту, может быть предусмотрен, по меньшей мере, один, снабжаемый электроэнергией из первого источника 126 электроэнергии или из первого электрического контура и приводимый в действие пневматическим тормозным давлением или тормозным управляющим давлением в одном или обоих рабочих пневматических тормозных управляющих контурах датчик 88 электрических сигналов, который при нажатии рабочего исполнительного органа 10 подает в электрический исполнительный сигнал. При этом датчик 88 электрических сигналов может быть интегрирован в электропневматическое рабочее тормозное клапанное устройство 1 и образовано, в частности, электрическим датчиком давления. Это измеренное датчиком 88 тормозное давление или тормозное управляющее давление имеется в напорных магистралях 44, 45 обоих пневматических рабочих тормозных контуров (фиг. 2). В третьем варианте датчик 67 тормозных значений рабочего тормозного клапанного устройства 1 питается током, например, из первого источника 126 электроэнергии по обозначенному штриховой линией проводу 96.
Во втором и третьем вариантах электронное устройство EBS/ABS-ECU управления торможением выполнено, в частности, таким образом, что оно обнаруживает выход из строя или неисправность содержащего второй источник 128 электроэнергии второго электрического контура или рулевого устройства 26 и при обнаружении такой неисправности и при наличии генерированного датчиком 86 исполнительного сигнала игнорирует и не реализует возможные выданные автопилотным устройством 70 сигналы запроса на рулевое управление.
Поэтому предусмотрен предпочтительно дополнительный к электрическому датчику 67 тормозных значений датчик 88 сигналов, который по отношению к электропневматическому рабочему тормозному устройству 124 снабжается электроэнергией из того же первого электрического питающего контура 126 и обнаруживает желание водителя затормозить. В этом случае даже при обнаружении неисправности в рулевом устройстве 26 не происходит никакого рулевого тормозного вмешательства, поскольку водитель очевидным образом на месте и может осуществлять контроль. Торможение происходит тогда только посредством пневматических рабочих тормозных контуров электропневматического рабочего тормозного устройства 124.
Согласно четвертому варианту, электропневматическое рабочее тормозное устройство 124 или его блок EBS/ABS-ECU управления торможением снабжается электроэнергией дополнительно из первого, содержащего первый источник 126 электроэнергии электрического контура. При этом датчик 67 тормозных значений рабочего тормозного клапанного устройства 1 снабжается электроэнергией из второго источника 128 электроэнергии по проводу 92.
В третьем и четвертом вариантах электрический рабочий тормозной контур электропневматического рабочего тормозного устройства 124 даже при выходе из строя первого электрического питающего контура или первого источника 126 электроэнергии получает запрос на торможение водителем и может реализовать его. За счет этого можно соответственно модифицировать тормозные давления в колесных тормозных актуаторах 118, 120 для рулевого торможения и, тем самым, одновременно реализовать как запрос на торможение водителем, так и запрос на рулевое управление. Поэтому эти варианты подходят также, чтобы представлять резервирование сервоподдержки в рулевом механизме 30 рулевого устройства 26.
Согласно другому варианту, электронное устройство управления FBM-ЕCU рабочего тормозного клапанного устройства 1 выполнено таким образом, что оно обнаруживает выход из строя или неисправность содержащего первый источник 126 электроэнергии первого электрического контура или электрического рабочего тормозного контура электропневматического рабочего тормозного устройства 124, причем тогда устройство управления FBM-ЕCU управляет рабочим тормозным клапанным устройством 1, чтобы оно реализовало возможные выданные автопилотным устройством 70 сигналы запроса на торможение в виде тормозных вмешательств в колесные тормозные актуаторы 118, 120.
Принцип действия электропневматического рабочего тормозного устройства 124 следующий. При исправном приоритетном электрическом рабочем тормозном контуре электропневматического рабочего тормозного устройства 124 при запросе на торможение водителем за счет нажатия рабочего тормозного исполнительного органа 10 в рабочем тормозном клапанном устройстве 1 посредством датчика 67 тормозных значений генерируется электрический сигнал запроса на торможение, который подается в дополнительное электронное устройство управления FBM-ЕCU рабочего тормозного клапанного устройства 1, где эти сигналы обрабатываются и подаются по шине 122 данных в электронное устройство EBS/ABS-ECU управления торможением. Там сигналы корректируются за счет более высоких функций, таких как зависимое от нагрузки регулирование тормозной силы (ALB), дифференциальное регулирование буксования и т.д., а затем оттуда соответственно представляющий заданное тормозное давление сигнал подается на модули 114, 116, ТСМ, где за счет соответствующего приведения в действие соответственно имеющихся там комбинаций впускного и выпускного клапанов из давления в ресивере модулируется соответствующее тормозное давление, подаваемое в колесные тормозные цилиндры 118, 120, чтобы соответственно зажать колеса. Посредством интегрированных в модули 114, 116, ТСМ датчиков давления измеряется фактическое тормозное давление и путем сравнения с заданным тормозным давлением, имеющимся в виде представляющего его сигнала в локальных блоках управления, адаптируется в смысле регулирования тормозного давления. Эти процессы протекают, поэтому в приоритетном электрическом рабочем тормозном контуре.
Параллельно этому за счет нажатия рабочего тормозного исполнительного органа 10 в обоих пневматических каналах 132, 134, а затем также в подключенных к ним напорных магистралях 44, 45 описанным выше образом вырабатывается тормозное давление, которое, однако, удерживается включенными в запертое положение, будучи под током, резервными электромагнитными клапанами в модулях 114, 116, ТСМ.
При возникновении неисправности в приоритетном электрическом рабочем тормозном контуре, будь то выход из строя первого источника 126 энергии, электронного устройства EBS/ABS-ECU управления торможением или одного из локальных блоков управления в модулях 114, 116, ТСМ, интегрированные в эти модули резервные электромагнитные клапаны обесточенными переключаются в свое положение пропускания, в результате чего имеющиеся в напорных магистралях 44, 5 тормозные давления направляются через модули 114, 116, ТСМ к колесным тормозным цилиндрам 118, 120 или к соединительной головке «тормоз», чтобы зажать колесные тормоза тягача или прицепа. Таким образом, при дефекте в электрическом рабочем тормозном контуре до сих пор тормоза могут приводиться в действие только водителем, а затем только чисто пневматически.
Кроме того, электронное устройство управления FBM-ЕCU электропневматического рабочего тормозного клапанного устройства 1 выполнено таким образом, что в случае обнаружения неисправности или выхода из строя приоритетного электрического рабочего тормозного контура электропневматического рабочего тормозного устройства и в случае наличия запроса на торможение оно управляет первым электромагнитным клапанным устройством 52b, чтобы, как описано выше, создать второе исполнительное усилие на управляющем поршне 12, которое даже без запроса на торможение водителем способно отвести затвор 36 от впускного седла 64 для заполнения ведущих к модулям 114, 116, ТСМ напорных магистралей 44, 45 образованным в соответствии со вторым исполнительным усилием тормозным давлением. Поскольку резервные электромагнитные клапаны обесточенными переключены в свое положение пропускания, это тормозное давление поступает тогда в колесные тормозные цилиндры 118, 120 и в соединительную головку «тормоз».
Выход из строя или неисправность электрического рабочего тормозного контура устанавливается, в частности, в рамках самоконтроля самим электронным устройством EBS/ABS-ECU управления торможением электропневматического рабочего тормозного устройства 124 или в рамках дистанционного контроля – электронным устройством управления FBM-ЕCU электропневматического рабочего тормозного клапанного устройства 1. Однако возможен также дистанционный контроль электронным устройством управления любой третьей системы. При этом коммуникация происходит предпочтительно через шину 122 данных. Поскольку электронное устройство управления FBM-ЕCU рабочего тормозного клапанного устройства 1 питается током из независимого от первого источника 126 энергии второго источника 128 энергии, эта функциональность не нарушается выходом из строя первого источника первого источника 126 энергии.
Второй источник электроэнергии может быть представлен, например, отдельной аккумуляторной батареей, (двухслойными) конденсаторами, дополнительным аккумулятором энергии или же собственным блоком вырабатывания тока (например, пневмогенератором). Второй источник энергии контролируется предпочтительно на зарядную емкость и функциональную способность (SOC: State Of Charge – состояние заряда, SOH: State Of Health – состояние работоспособности, регулярная зарядка/разрядка). Это может осуществляться, например, посредством электронного устройства EBS/ABS-ECU управления торможением электропневматического рабочего тормозного устройства 124, электронного устройства управления FBM-ЕCU рабочего тормозного клапанного устройства 1 или другой системой, например, посредством контроля аккумуляторной батареи системы управления гибридным приводом автомобиля.
При этом запрос на торможение может происходить от любой системы автомобиля, здесь, в частности, от автопилотного устройства 70 или, например, также от системы адаптивного круиз-контроля АСС, посредством которой поддерживается постоянным расстояние до впереди идущего автомобиля или скорость относительно него. Тогда функциональность такой системы АСС может поддерживаться даже тогда, когда электрический рабочий тормозной контур рабочего тормозного устройства 124 вышел из строя.
Автоматически генерированный запрос на торможение или автоматически генерированный сигнал запроса на торможение подается затем в виде электрического сигнала через интерфейс 13 в устройство управления FBM-ЕCU рабочего тормозного клапанного устройства 1, чтобы генерировать второе исполнительное усилие на управляющем поршне 12. Поскольку этот интерфейс 13 подключен предпочтительно к шине 122 данных, по которой происходит коммуникация не только с электронным устройством EBS/ABS-ECU управления торможением электропневматического рабочего тормозного устройства 124, но и с электронными устройствами управления нескольких дополнительных электронных систем автомобиля, включающих в себя, в частности, по меньшей мере, одну систему помощи водителю, такую как АСС, сигнал запроса на торможение может автоматически генерироваться любой системой тягача.
Как уже сказано, по меньшей мере, при обнаружении неисправности или выхода из строя первого источника 126 электроэнергии и/или электронного устройства EBS/ABS-ECU управления торможением дополнительное электронное устройство управления FBM-ЕCU управляется автопилотным устройством 70 в соответствии с его предписанием тормозного действия, например, в рамках оказывающегося необходимым экстренного торможения, чтобы осуществить резервное торможение находящегося в движении автомобиля за счет подачи тормозного давления в колесные тормозные актуаторы 118, 120.
Как следует из фиг. 1, из второго источника 128 электроэнергии ею снабжается также сенсорное устройство 139, с помощью которого во время резервного торможения обнаруживается чрезмерное буксование и которое отличается также от обычной сенсорики ABS, которая вследствие неисправности или выхода из строя первого источника 126 электроэнергии и/или электронного устройства EBS/ABS-ECU управления торможением больше не работоспособна. Это сенсорное устройство включает в себя датчики, которые, как правило, уже имеются в современных автомобилях и потому больше не должны быть дополнительно предусмотрены, и может иметь различные варианты.
Сенсорное устройство 139 подключено предпочтительно к шине 122 данных, к которой подключены также дополнительное электронное устройство управления FBM-ЕCU и электронное устройство EBS/ABS-ECU управления торможением, с тем, чтобы данные датчиков сенсорного устройства 139, описанные ниже более подробно, можно было подавать в дополнительное электронное устройство управления FBM-ЕCU.
Согласно первому варианту (не показан), сенсорное устройство 139 содержит, по меньшей мере, один датчик продольного ускорения, который подает в дополнительное электронное устройство управления FBM-ЕCU первое значение, представляющее продольное ускорение или продольное замедление автомобиля, и, по меньшей мере, один датчик тормозного давления, который, например, уже имеется в модулях 114, 116 регулирования давления и подает в дополнительное электронное устройство управления FBM-ЕCU второе значение, представляющее тормозное давление. Во время резервного торможения дополнительное электронное устройство управления FBM-ЕCU может обнаружить чрезмерное буксование при наличии превышающего допустимое или заданное отклонение отклонения отношения, соотношения или связи между первым и вторым значениями от ожидаемого или заданного отношения, ожидаемого или заданного соотношения или ожидаемой или заданной связи между первым и вторым значениями.
Поэтому в первом варианте используется имеющаяся корреляция между введенным в колесные тормозные актуаторы 118, 120 тормозным давлением и результирующим из этого продольным ускорением автомобиля, чтобы обнаружить недопустимую блокировку колес при торможении. При этом физическая основа в том, что при незаблокированных колесах параметры тормозное давление и продольное замедление автомобиля почти пропорциональны, а при заблокированных при торможении колесах – нет, поскольку тогда, несмотря на возрастающее тормозное давление, продольное замедление автомобиля остается постоянным или даже немного уменьшается. Корреляция или коэффициент пропорциональности между обоими параметрами возникает, по меньшей мере, за счет массы автомобиля.
Согласно второму варианту (также не показан), сенсорное устройство содержит датчик угловой скорости, который подает в дополнительное электронное устройство управления FBM-ЕCU третье значение, представляющее фактическую угловую скорость автомобиля, а также датчик угла поворота рулевого колеса, который подает в дополнительное электронное устройство управления FBM-ЕCU четвертое значение, представляющее заданную угловую скорость автомобиля. Во время резервного торможения дополнительное электронное устройство управления FBM-ЕCU может обнаружить чрезмерное буксование при превышении заданного порога за счет разности между третьим и четвертым значениями.
Поэтому во втором варианте чрезмерное превышение заданной угловой скорости, которая зависит здесь от угла поворота рулевого колеса, за счет фактической угловой скорости, которая определяется, например, датчиком угловой скорости, является доказательством наличия чрезмерной блокировки при возможном движении по кривой во время резервного торможения, поскольку она ведет к уменьшению сил бокового увода, которые, в свою очередь, вызывают увеличение угловой скорости.
Согласно третьему варианту (также на показан), сенсорное устройство 139 содержит датчик частоты вращения, который подает в дополнительное электронное устройство управления FBM-ЕCU пятое значение, представляющее фактическую частоту вращения выходного вала коробки передач автомобиля, и датчик частоты вращения колеса, который подает в дополнительное электронное устройство управления FBM-ЕCU шестое значение, представляющее частоту вращения, по меньшей мере, одного из ведомых колес автомобиля. Во время резервного торможения дополнительное электронное устройство управления FBM-ЕCU может обнаружить чрезмерное буксование при наличии превышающего допустимое или заданное отклонение отклонения отношения, соотношения или связи между пятым и шестым значениями от ожидаемого или заданного отношения, ожидаемого или заданного соотношения или ожидаемой или заданной связи между пятым и шестым значениями.
Поэтому в третьем варианте использована обычная, т.е. постоянная при отсутствии блокировки или при лишь очень малой блокировке, связь между частотой вращения выходного вала коробки передач, который приводит тогда ведущие и заторможенные колеса автомобиля, и частотой вращения, по меньшей мере, одного из ведомых, однако заторможенных колес автомобиля или автопоезда. Если же, например, возникает чрезмерная блокировка ведущего моста, то частота вращения выходного вала коробки передач падает, тогда как частота вращения колес на ведомом мосту не уменьшается, например, из-за локально более высокого там коэффициента трения. Следовательно, изменение обычной связи обоих параметров является доказательством наличия блокировки заднего моста.
Согласно четвертому варианту (также не показан), сенсорное устройство 139 содержит датчик, который подает в дополнительное электронное устройство управления FBM-ЕCU седьмое значение, представляющее продольную качку автомобиля или автопоезда при торможении, причем этот датчик может непосредственно или косвенно регистрировать продольную качку при торможении и представляет собой, в частности, датчик-радар или датчик-камеру, который может обнаружить продольную качку автомобиля по отношению к окружающему пространству в качестве эталона, поскольку оно не движется в вертикальном направлении. Кроме того, сенсорное устройство 139 содержит в четвертом варианте датчик продольного ускорения, который подает в дополнительное электронное устройство управления FBM-ЕCU восьмое значение, представляющее продольное ускорение или продольное замедление автомобиля.
Во время резервного торможения дополнительное электронное устройство управления может обнаружить чрезмерное буксование при наличии превышающего допустимое отклонение отклонения отношения, соотношения или связи между седьмым и восьмым значениями от ожидаемого или заданного отношения, ожидаемого или заданного соотношения или ожидаемой или заданной связи между седьмым и восьмым значениями.
В основе четвертого варианта лежит идея, заключающаяся в том, что при чрезмерной блокировке при торможении эффекты продольной качки автомобиля менее выражены благодаря меньшим тогда тормозным силам, чем при небольшой блокировке или ее отсутствии.
Согласно пятому варианту (также не показан), сенсорное устройство 139 содержит, по меньшей мере, один датчик, который подает в дополнительное электронное устройство управления девятое значение, представляющее фактическое боковое движение автомобиля или автопоезда. У такого датчика речь идет предпочтительно о датчике-камере и/или датчике-радаре, который может обнаружить боковое движение автомобиля по отношению к окружающему пространству в качестве неподвижного эталона. Кроме того, сенсорное устройство 139 содержит, по меньшей мере, один датчик, который подает в дополнительное электронное устройство управления десятое значение, представляющее заданное боковое движение автомобиля, причем этот, по меньшей мере, один датчик регистрирует, например, угол поворота рулевого колеса, а также скорость. Тогда во время резервного торможения дополнительное электронное устройство управления FBM-ЕCU обнаруживает чрезмерное буксование при превышении заданного порога за счет разности между девятым и десятым значениями.
В основе пятого варианта лежит идея, заключающаяся в том, что при чрезмерной блокировке боковые движения автомобиля при возможном движении по кривой во время резервного торможения, которые характеризуются тогда, например, определенным углом бокового увода и/или углом рыскания, лежат выше порога, поскольку тогда силы бокового увода заторможенных колес относительно малы, и вследствие этого возникают также бóльшие боковые движения. С помощью, например, датчика угла поворота рулевого колеса регистрируется по сравнению с этим заданное боковое движение.
С помощью одного или нескольких описанных выше вариантов сенсорных устройств 139, не затронутых выходом из строя или неисправностью первого источника 126 электроэнергии или электронного устройства EBS/ABS-ECU управления торможением, чрезмерное буксование во время резервного торможения обнаруживается поэтому дополнительным электронным устройством управления FBM-ECU, которое также не затронуто выходом из строя или неисправностью первого источника 126 электроэнергии или электронного устройства EBS/ABS-ECU управления торможением. Как показано на фиг. 1, сенсорное устройство 139, шина 122 данных и дополнительное электронное устройство управления FBM-ECU снабжаются электроэнергией из второго источника 128 электроэнергии. Отдельные датчики сенсорного устройства 139 в зависимости от своего назначения, как правило, распределены в автомобиле.
Как сказано выше, в случае неисправности или выхода из строя электрического тормозного контура автопилотное устройство 70 может управлять дополнительным электронным устройством управления FBM-ECU посредством электрического сигнала, представляющего предписание тормозного действия и здесь, в частности, предписание тормозного давления, чтобы за счет подачи давления в колесные тормозные актуаторы 118, 120 достичь резервного торможения.
При этом дополнительное электронное устройство управления FBM-ECU выполнено таким образом, что после того, как во время резервного торможения оно обнаружило чрезмерное буксование в одном или нескольких описанных выше вариантах, оно за счет управления электромагнитным клапанным устройством 52 подает описанным образом в колесные тормозные актуаторы 118, 120 тормозное давление, соответствующее тормозному действию, которое меньше предписания тормозного действия автопилотным устройством 70. В частности, поэтому в случае чрезмерного буксования во время резервного торможения в колесные тормозные актуаторы 118, 120 подается тормозное давление, которое меньше тормозного давления, соответствующего предписанию тормозного действия и, в частности, предписания тормозного давления автопилотным устройством 70. Благодаря этой мере устраняется чрезмерная блокировка при торможении аналогично традиционной, однако из-за выхода из строя или неисправности электрического тормозного контура больше не работоспособной системы ABS, и при возможном во время резервного торможения движении по кривой повышаются силы бокового увода.
Особенно предпочтительно уменьшение тормозного действия включает в себя по сравнению с предписанием тормозного действия смену между понижением и повышением тормозного давления в колесных тормозных актуаторах 118, 120 за счет управления электромагнитным клапанным устройством 52 посредством дополнительного электронного устройства управления FBM-ECU. Другими словами, аналогично традиционной системе ABS происходит модуляция тормозного давления, например, за счет периодических повышения и понижения тормозного давления, причем в среднем по времени по сравнению с предписанием тормозного действия возникает меньшее тормозное давление.
Предпочтительно электронное устройство управления FBM-ECU выполнено таким образом, что в рамках первого режима обнаружения оно сохраняет в памяти, например, во встроенной памяти, первое значение тормозного давления, при котором впервые возникло чрезмерное буксование в пределах первого режима обнаружения, в качестве первого обнаруженного критического значения тормозного давления, а затем за счет управления электромагнитным клапанным устройством 52 периодически повышает тормозное давление только до первого обнаруженного критического значения тормозного давления, после чего снова понижает. Следовательно, дополнительное электронное устройство управления FBM-ECU в рамках повышения тормозного давления «запоминает» «угловое» тормозное давление, при котором тогда впервые возникла чрезмерная блокировка. Кроме того, это первое значение тормозного давления меньше тормозного давления, которое соответствует предписанию тормозного действия автопилотным устройством 70. Это первое значение тормозного давления представляет собой тогда также меру имеющегося в данный момент коэффициента трения поверхности проезжей части. С помощью хранящегося в памяти первого значения тормозного давления можно повысить тогда скорость адаптации тормозного давления, используя это первое значение тормозного давления в качестве нового предписания тормозного давления.
Далее дополнительное электронное устройство управления FBM-ECU может быть выполнено таким образом, что оно по времени после первого режима обнаружения осуществляет, по меньшей мере, один второй режим обнаружения, чтобы записать в память второе значение тормозного давления, при котором впервые возникло чрезмерное буксование в пределах второго режима обнаружения, в качестве второго обнаруженного критического значения тормозного давления, а затем за счет управления электромагнитным клапанным устройством периодически повышать тормозное давление только до этого второго обнаруженного критического значения тормозного давления, после чего снова понижать. Это предпочтительно, в частности, тогда, когда еще во время резервного торможения коэффициент трения проезжей части через некоторое время изменяется, причем это изменение коэффициента трения представлено тогда вторым значением тормозного давления.
Фиг. 9а, 9b относятся к описанному выше первому варианту сенсорного устройства 139. При этом дополнительное электронное устройство управления FBM-ECU в том случае, если оно во время резервного торможения обнаруживает чрезмерное буксование за счет наличия превышающего допустимое или заданное отклонение отклонения отношения, соотношения или связи между продольным ускорением ах автомобиля (фиг 9а) и тормозным давлением р в колесных тормозных актуаторах 118, 120 (фиг. 9b) от ожидаемого или заданного отношения, ожидаемого или заданного соотношения или ожидаемой или заданной связи между продольным замедлением ах и тормозным давлением р, оно за счет управления электромагнитным клапанным устройством 52 может периодически сначала повышать тормозное давление до максимально соответствующего предписанию тормозного действия автопилотным устройством 70 до тех пор, пока продольное замедление ах автомобиля больше не будет возрастать и не примет максимальное значение, а затем снова понижать тормозное давление, пока замедление ах автомобиля снова не уменьшится.
Во временнóй последовательности после инициирования резервного торможения тормозное давление р повышается до тех пор, пока продольное замедление ах больше не будет возрастать и примет максимальное значение аmax. При этом на фиг. 9а tL обозначена продолжительность, которая требуется стандартным программам в дополнительном электронном устройстве управления FBM-ECU, чтобы при данном коэффициенте трения проезжей части обнаружить это максимально возможное продольное замедление аmax. Тогда тормозное давление pstabil-max, при котором продольное замедление ах больше не возрастает и принимает максимальное значение аmax, представляет собой предел давления или устойчивости, при котором продольное замедление ах «насыщено». Затем тормозное давление р снова понижается, пока продольное замедление ах снова не уменьшится, например, до минимального значения аmin. При последующем повышении тормозного давления р оно снова повышается до тех пор, пока продольное ускорение ах больше не будет возрастать. Таким образом, устанавливается смена между повышением и понижением тормозного давления р.
Далее дополнительное электронное устройство управления FBM-ECU выполнено предпочтительно таким образом, что во время резервного торможения оно обнаруживает чрезмерное буксование также на основе данных, которые еще до возникновения неисправности или выхода из строя переданы на дополнительное электронное устройство управления FBM-ECU и записаны в память. Такая передача может происходить, например, посредством шины 122 данных, к которой подключены дополнительное электронное устройство управления FBM-ECU, а электронное устройство EBS/ABS-TCU управления торможением, а также другие устройства управления, снабжаемые данными от различных датчиков.
При этом данные могут включать в себя, по меньшей мере, одни из следующих данных: массу автомобиля, осевые нагрузки и/или распределение осевых нагрузок автомобиля, коэффициент трения проезжаемой автомобилем проезжей части. В частности, дополнительное электронное устройство управления FBM-ECU может быть тогда выполнено таким образом, что во время резервного торможения оно согласует по мостам тормозное давление в зависимости от осевых нагрузок.
Предпочтительно дополнительное электронное устройство управления FBM-ECU может выполнено также таким образом, что во время резервного торможения оно дополнительно осуществляет активирование ретардера и/или снижение приводной мощности приводного двигателя автомобиля.
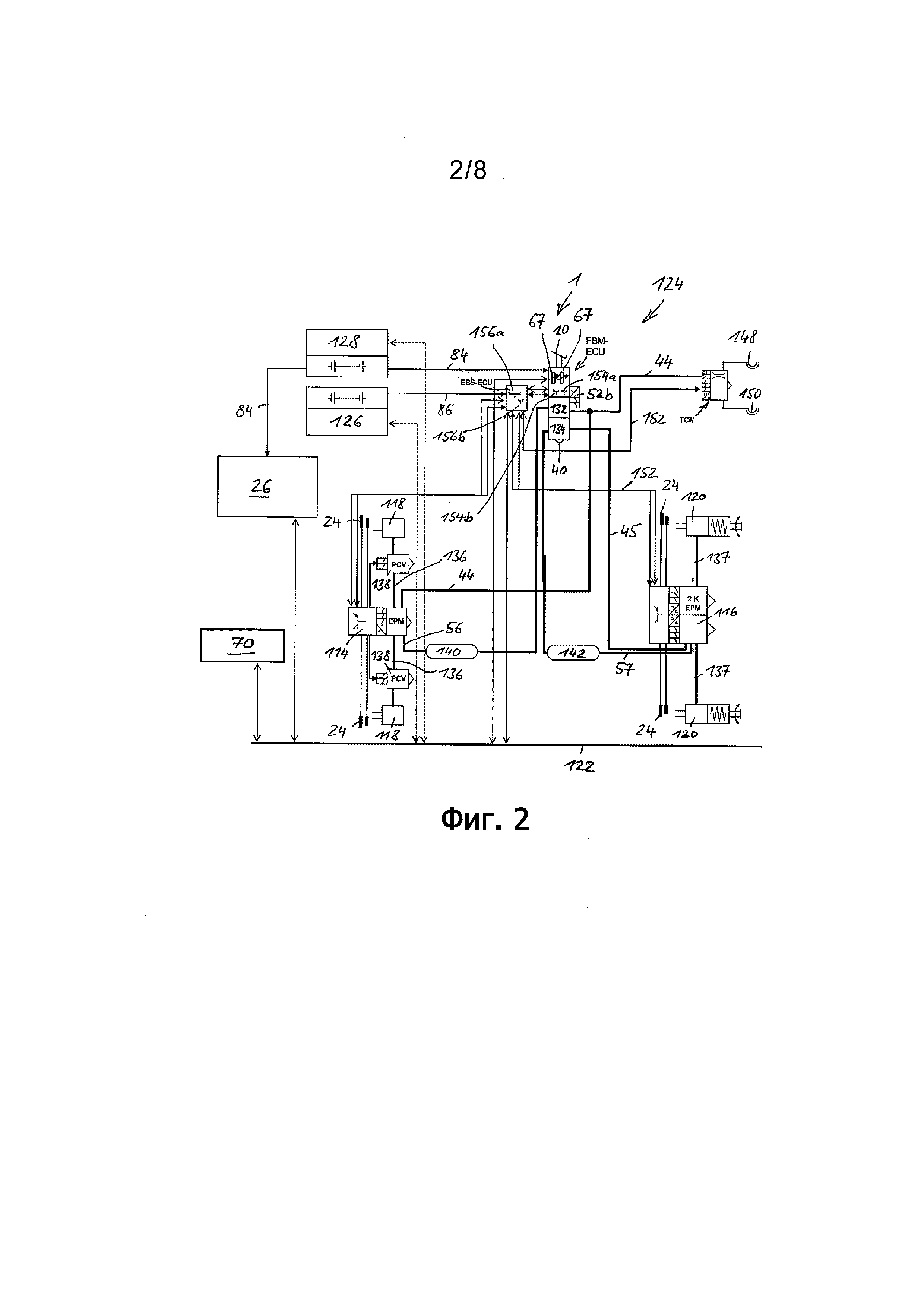
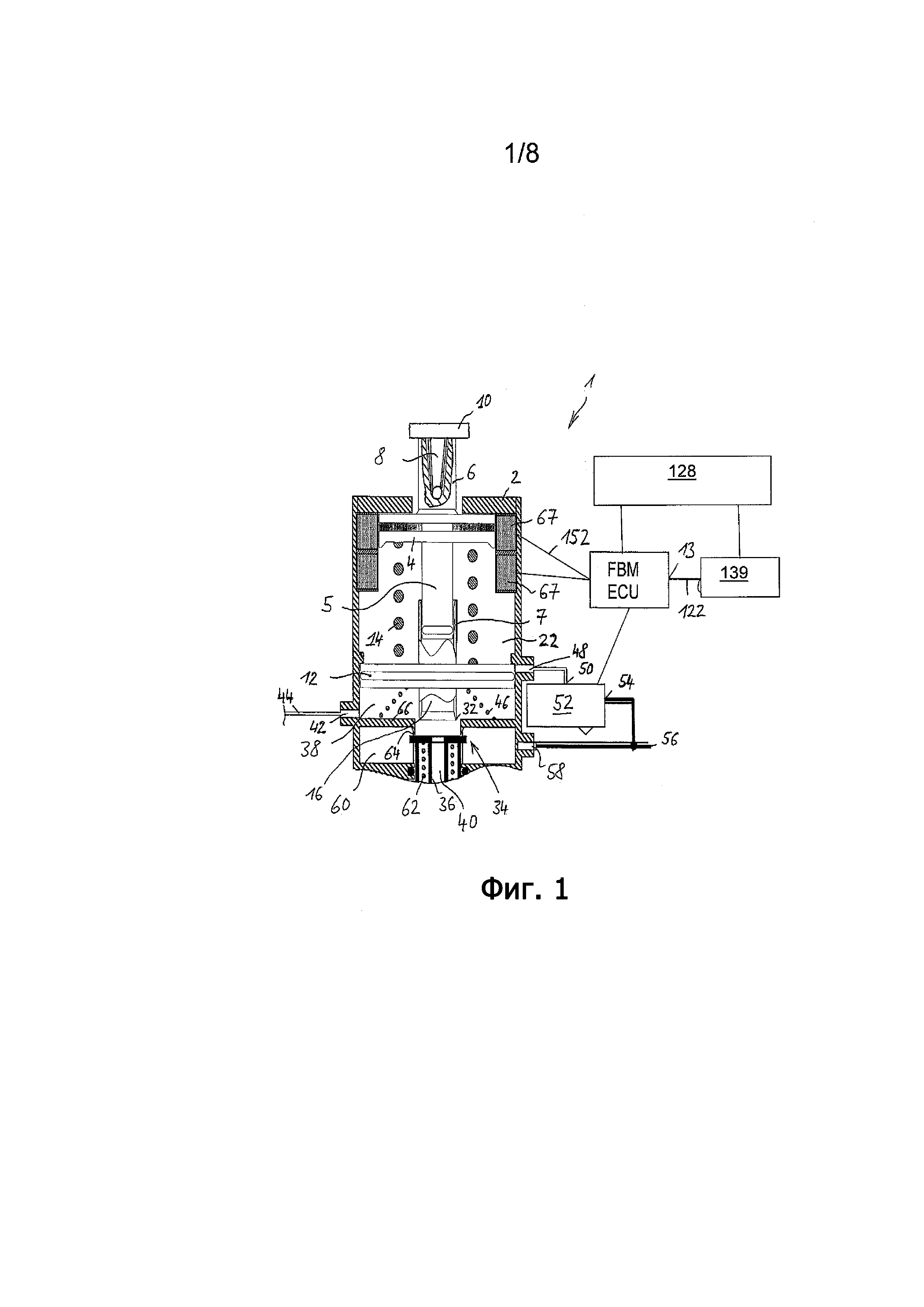
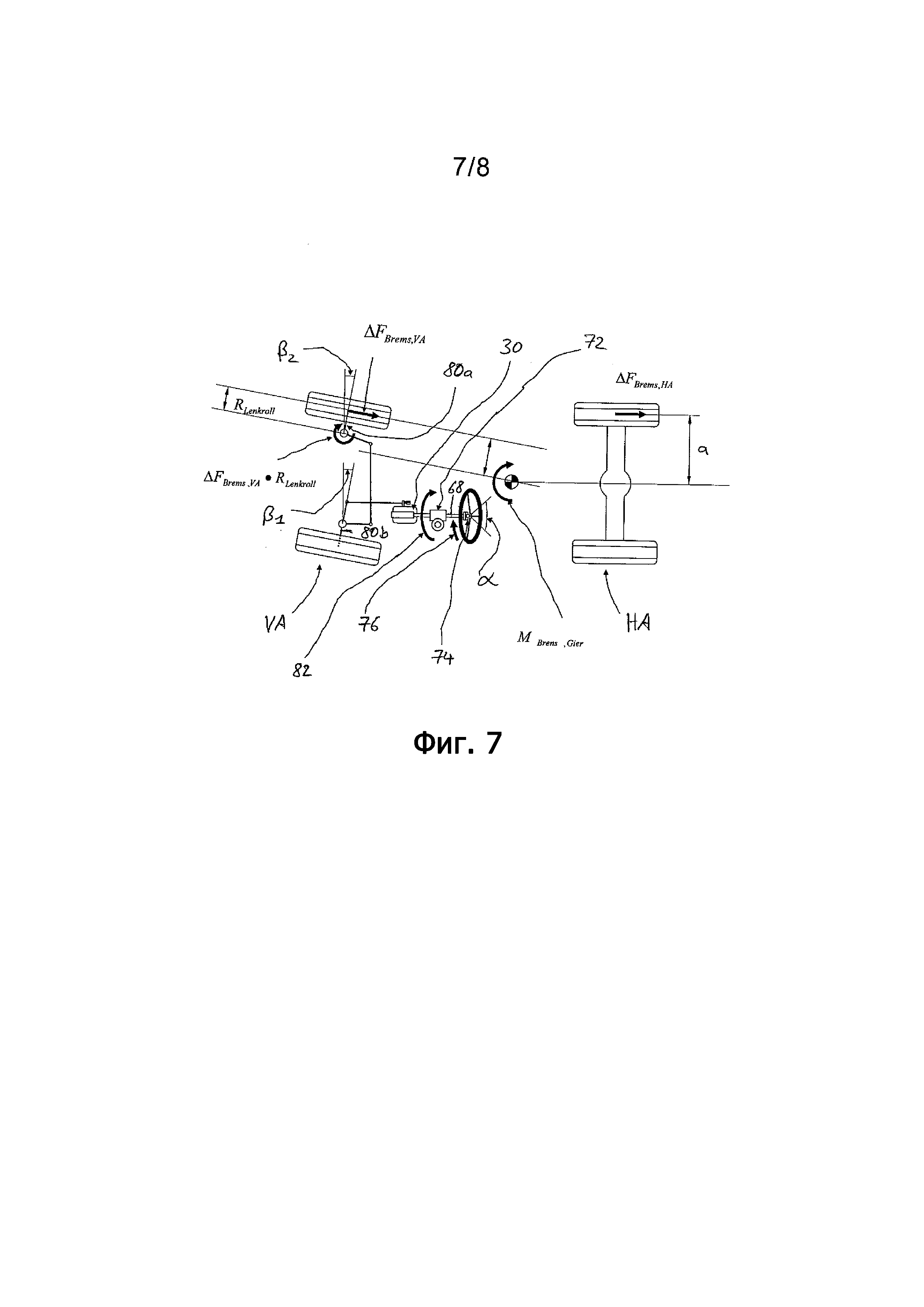
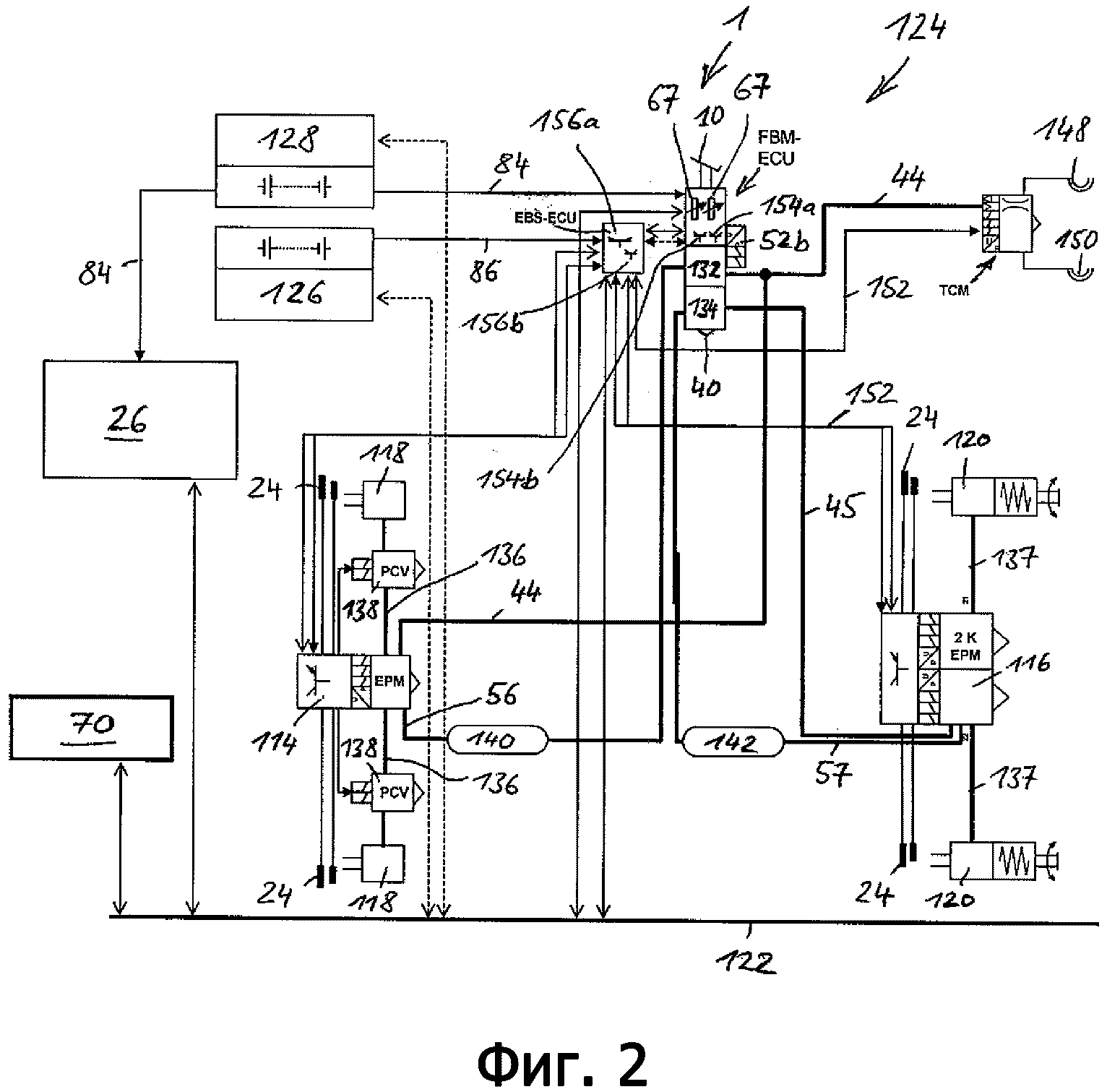
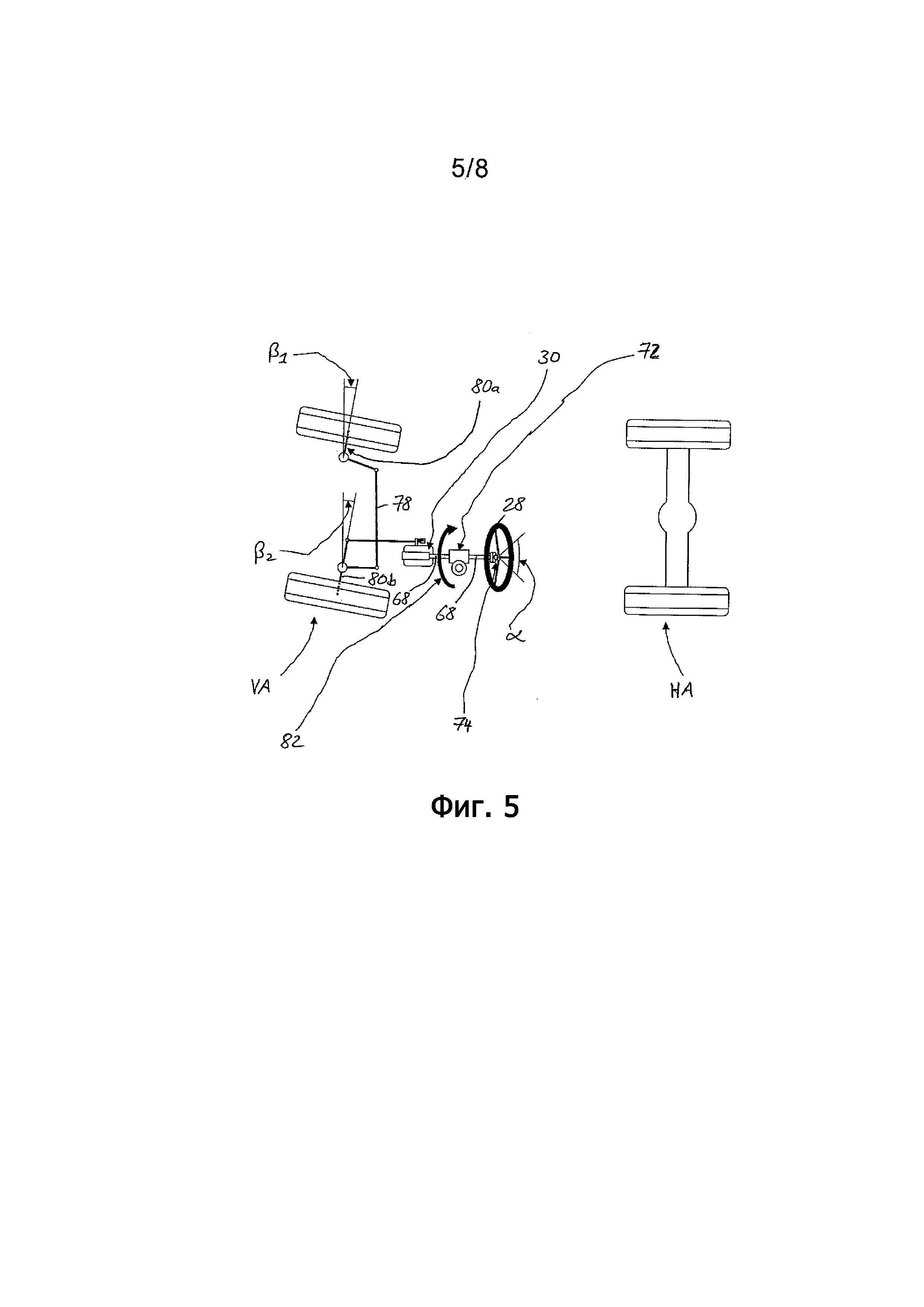
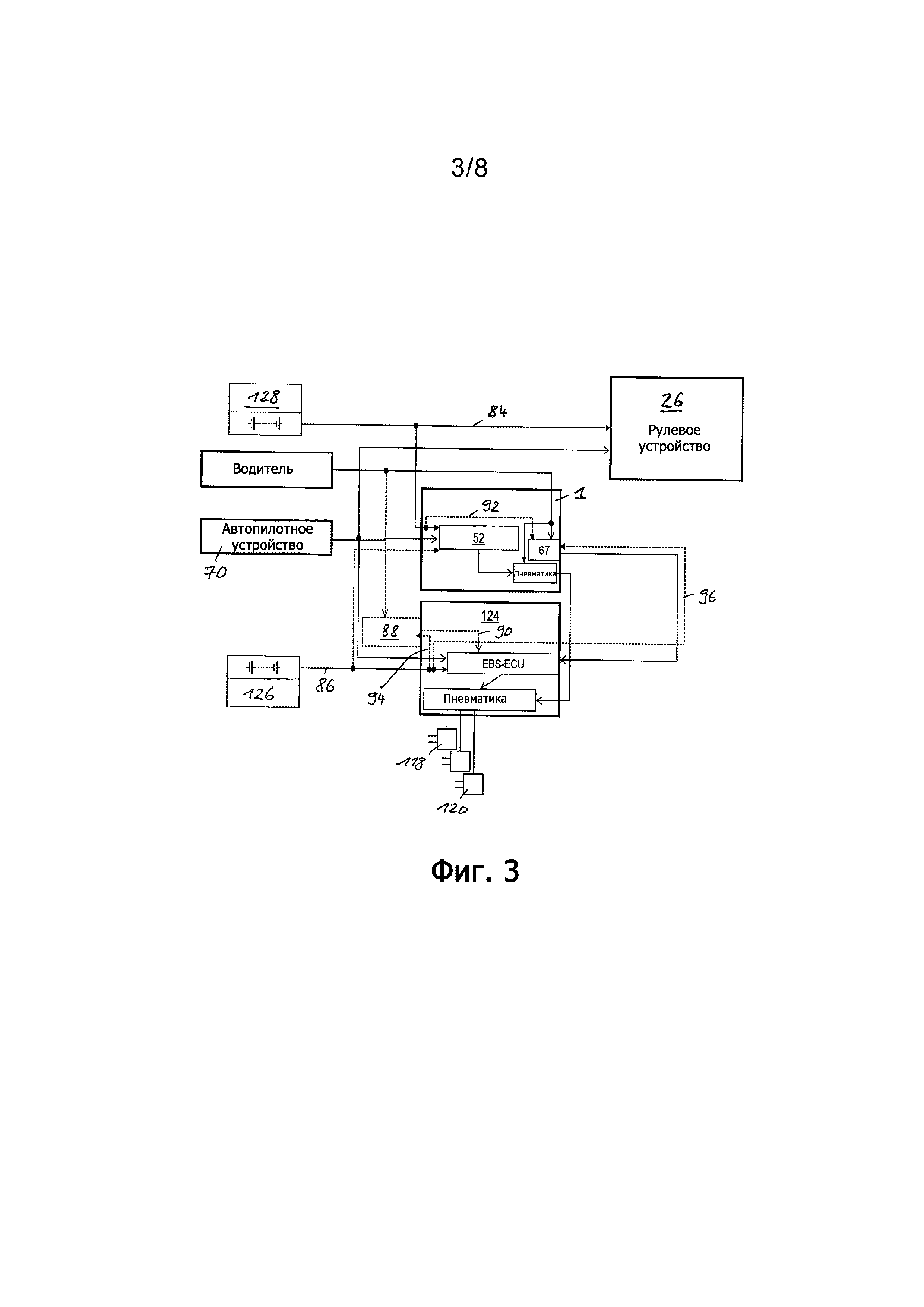
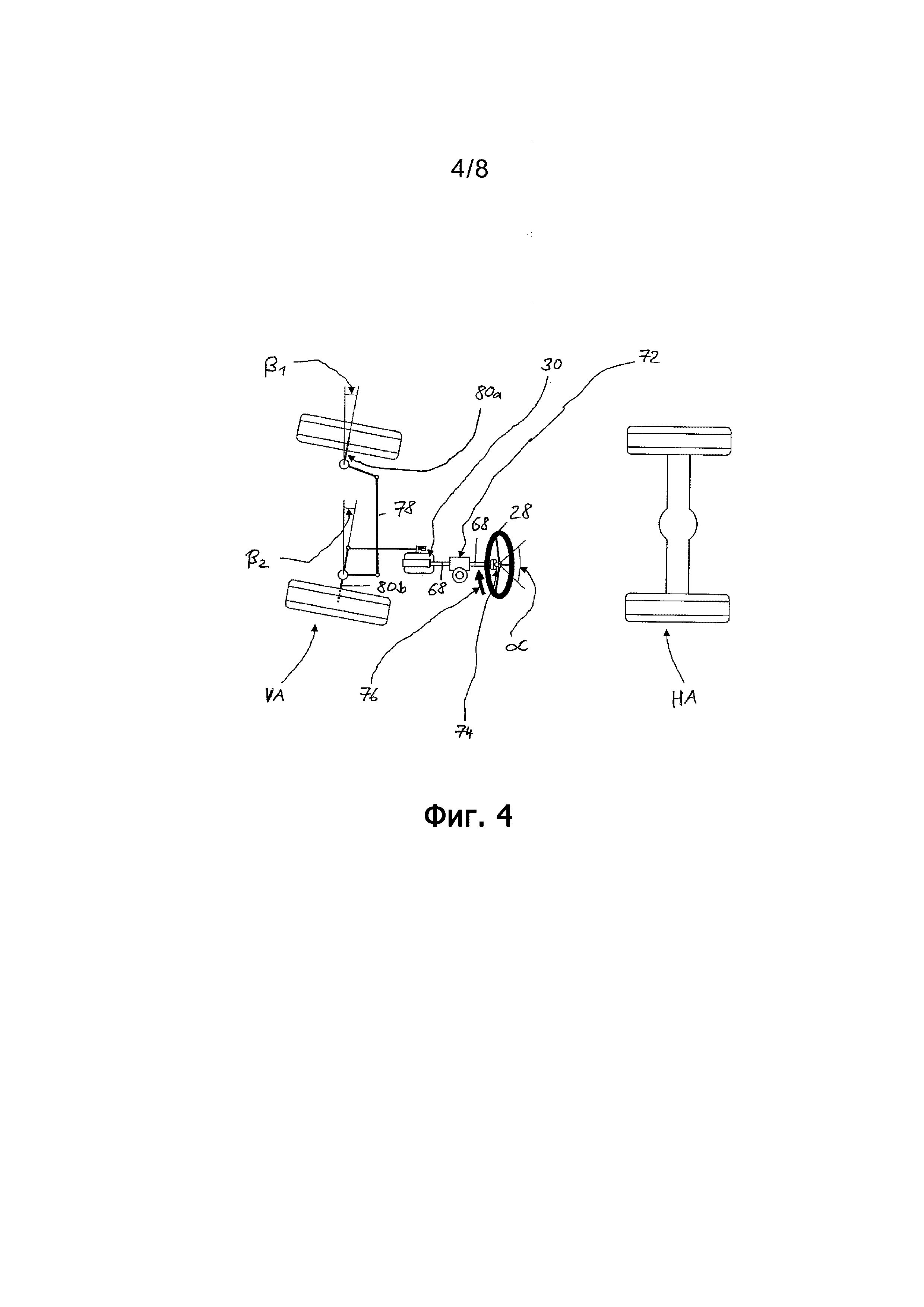
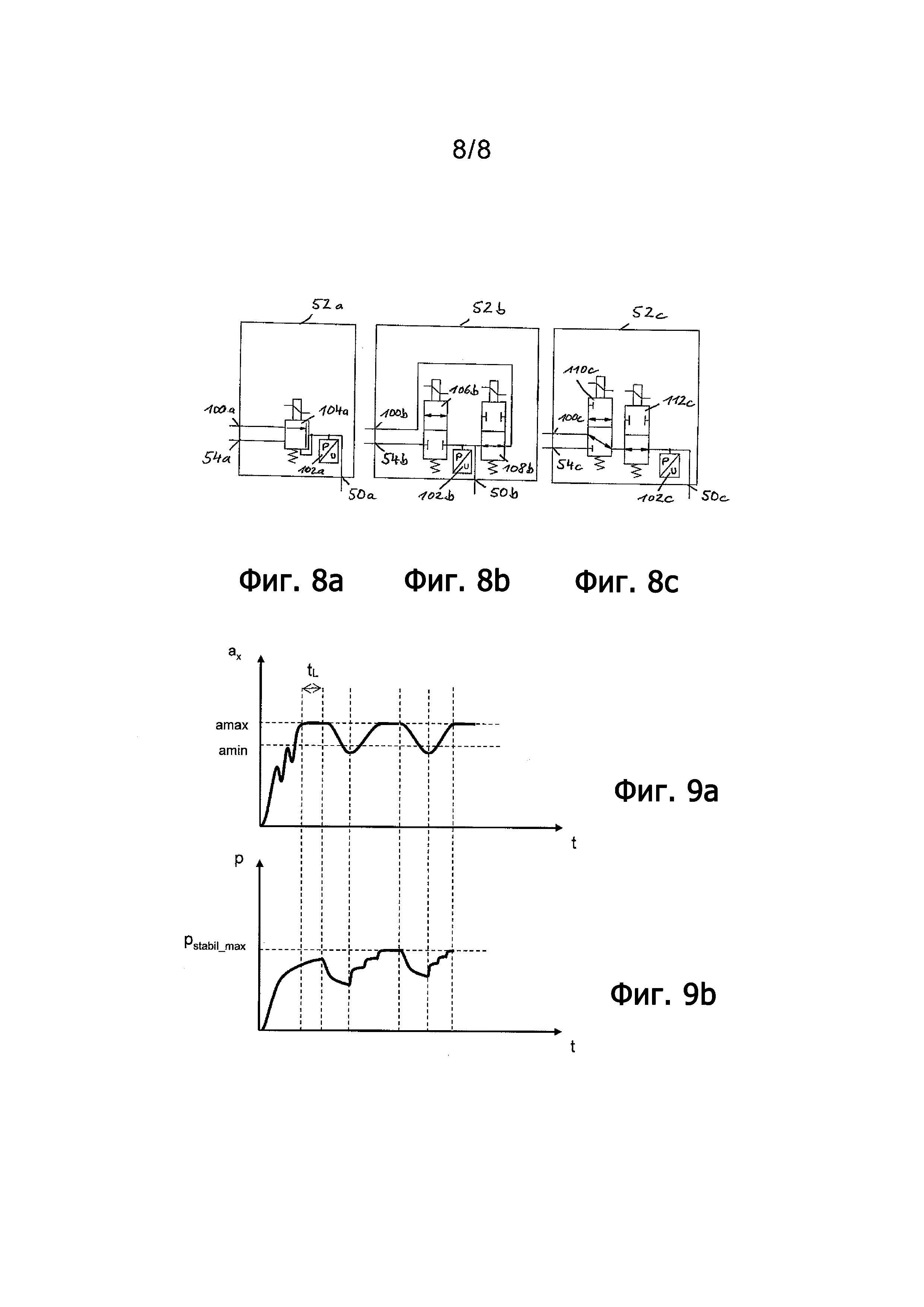
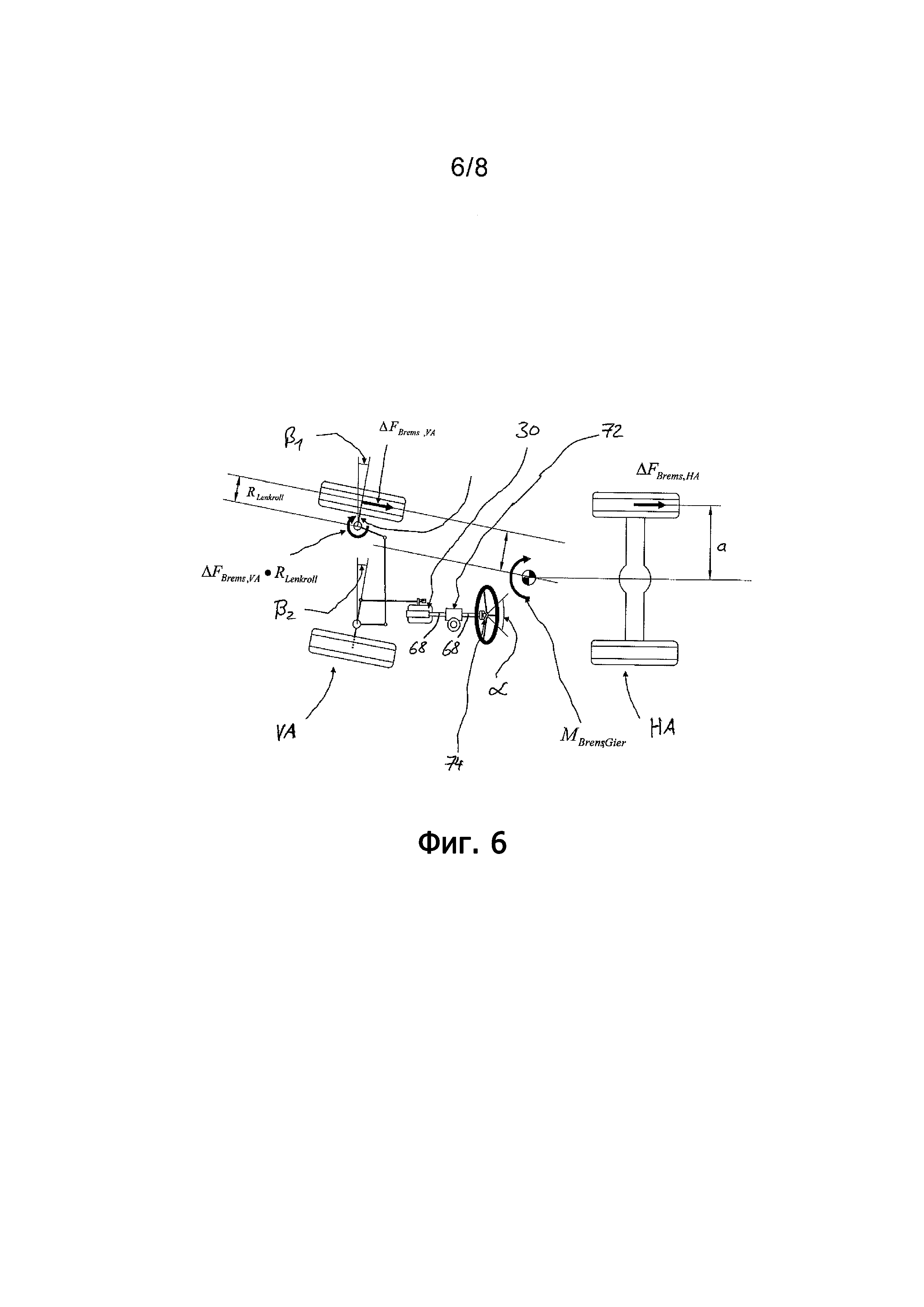
Глушитель шума
Тормозная накладка дискового тормоза
Компрессорная система и способ ее эксплуатации
Накладка тормозной колодки для дискового тормоза
Система регулирования отработавшего газа и способ регулирования отработавшего газа
Регулировочное приспособление для дискового тормоза
Регулировочное устройство для дискового тормоза
Способ установки регулировочного устройства на дисковом тормозном механизме
Компрессор с гидравлическим насосом и способ изготовления компрессора с гидравлическим насосом
Устройство снабжения свежей горючей смесью для двигателей внутреннего сгорания с газотурбинным нагнетателем и способ его управления
Способ электронного регулирования распределения тормозного усилия в тормозном устройстве, приводимом в действие рабочей средой под давлением, транспортного средства с указанным регулированием
Гидравлический переходник, гидравлическая сопрягаемая деталь для быстроразъемного замка, быстроразъемный замок и грузовое транспортное средство
Способ и устройство для управления движением транспортного средства и система управления движением транспортного средства

