Результат интеллектуальной деятельности: Способ синхронизации корабельных гидроакустических станций
Вид РИД
Изобретение
Изобретение относится к области гидроакустики, в частности гидролокации, и может быть использовано при построении систем обнаружения подводных целей, например, подводных лодок (ПЛ) или автономных подводных аппаратов (АПА), группой надводных кораблей (НК) - поисково-ударной группой (ПУГ).
В теории поиска известен способ поиска объекта, содержащий излучение в рабочую среду - воздух в радиолокации и воду в гидроакустике - зондирующего сигнала и прием отраженного от объекта поиска сигнала - электромагнитного в радиолокации и акустического в гидроакустике [1].
Известен способ поиска объекта группой наблюдателей [2]. Организация процесса поиска зависит от возможностей обнаружения радиолокационных или гидроакустических станций (РЛС или ГАС) объекта, скоростей наблюдателя и цели, а также числа наблюдателей и расстояния между ними.
В гидроакустике обычно расстояние между судами-носителями ГАС выбирается с перекрытием зон обнаружения ГАС соседних судов, т.е. Дк≤2 До, где Дк - расстояние между судами, До - прогнозируемая (ожидаемая) средняя дальность действия ГАС в конкретных гидролого-акустических условиях.
Увеличение расстояния между наблюдателями приводит к увеличению ширины полосы поиска на величину более До и, соответственно, к росту вероятности неуклонения объекта. Однако при этом появляются «разрывы» в полосе поиска и повышается успешность маневра прорыва объекта между наблюдателями. Ввиду этого, выбор величины Дк осуществляется на основе обеспечения заданной эффективности поиска и с учетом случайного характера процесса обнаружения в конкретных условиях наблюдения.
Необходимо отметить, что расстояние между судами-носителями ГАС-может выбираться также с учетом соображений, не связанных с эффективностью поиска, например, по мерам безопасности совместного плавания, для устойчивости связи и управления, вследствие возможности возникновения террористических угроз, возможности атак с воздуха и др.
При совместной работе в группе радиоэлектронных средств (РЭС) - РЛС или ГАС - возникают взаимные (непреднамеренные, в отличие от преднамеренно выставляемых противником [3]) помехи, существенно снижающие эффективность обнаружения целей.
Непреднамеренные помехи, обусловленные излучением соседних РЭС, поступают в тракт приема соседней РЛС или ГАС через время Тк после излучения мешающей станции с периодичностью Тц

где Д - расстояние между объектами-носителями, с - скорость распространения волн в среде.
При произвольно выбранном расстоянии между объектами непреднамеренные помехи могут появляться на участках шкалы по дальности там, где находится цель и, таким образом, маскировать последнюю.
Возможности по снижению помех такими мерами, как частотный разнос, в гидроакустике ограничены по сравнению, например, с радиолокацией, по причине узкополосности излучающих антенн ГАС и необходимости использования сложных широкополосных сигналов (для борьбы с реверберационной помехой).
Снижение мощности излучения и введение секторного режима работы значительно снижают поисковую производительность, т.е. обесценивают поисковые усилия корабельной группы. Применение сложных ортогональных сигналов в одинаковой для всех ГАС полосе частот не улучшает помеховой обстановки в группе, так как это неэффективно при помехах блокирующего типа, приводящих к перегрузке входных трактов ГАС (а именно такие помехи вызывают сигналы соседних ГАС).
Одним из эффективных методов является временная синхронизация, поскольку позволяет преобразовать непреднамеренные помехи к синхронным помехам, поддающимся в ряде случаев полному подавлению.
Известны способы синхронизации радиолокационных и гидроакустических станций, предназначенные для снижения уровня взаимных помех при совместном использовании таких средств, а также устройства для их реализации.
В способе синхронизации синхронную работу РЭС устанавливают и поддерживают путем периодического согласования временных шкал опорного и ведомых формирователей сигналов синхронизации, при этом сигналы синхронизации передают по радиоканалу. Шкала синхронизации вводится для группы судов. Формирователь шкалы синхронизации реализуется во внешнем относительно других носителей источнике или непосредственно на носителях [4].
Известен способ синхронизации однотипных РЭС, в том числе и ГАС, содержащий формирование зондирующих импульсов на ведущей станции, назначаемой заблаговременно, по которым запускаются синхронизирующие сигналы (пилот-сигналы), передачу синхронизирующих сигналов на ведомые станции по радиоканалу, излучение ведомыми станциями при поступлении на них синхронизирующих сигналов зондирующих импульсов, период следования зондирующих сигналов ведомых станций подстраивают под период зондирования ведущей станции с учетом времени прохождения зондирующих импульсов в среде распространения, при этом время запаздывания сигнала в среде распространения рассчитывают по формуле (1) [5].
Для выделения потока импульсов ведущей станции предусмотрены алгоритм и схема временной селекции. При этом обеспечивается подавление непреднамеренных помех на ведомых станциях путем подстройки их периодов обзора под величину Тц и смещения помеховых зон (участки шкалы по дальности, соответствующие мешающим сигналам) на участок обратного хода развертки индикаторов.
На экране индикатора ведущей станции наблюдаются помеховые зоны от ведомых станций, расположенные вблизи от центра индикатора (в области мертвой зоны станции).
При такой организации совместной работы, например, ГАС 2-х соседних судов, обеспечивается совпадение в каждом цикле обзора моментов излучения и моментов прихода непреднамеренных помех, если суда разнесены на расстояние ровно 2Дш, где Дш - шкала дистанции ГАС.
Принципиальный недостаток данного способа заключается в устранении помех ведомого РЭС от излучения только того РЭС, которое выбрано в качестве ведущего; мешающие сигналы от других РЭС группы на индикаторе ведомой станции не подавляются.
Второй недостаток состоит в принципиальной невозможности устранить помехи от излучения ведомых станций на индикаторе ведущей станции.
Ограничение применения данного способа для корабельных ГАС состоит в том, что из-за небольшой скорости распространения звука в водной среде аналогичный пораженный взаимными помехами участок, соответствующий расстояниям между ГАС, будет перекрывать шкалу дистанции ГАС Дш, связанную с периодом обзора пространства Тц соотношением

Известен способ синхронизации корабельных ГАС, содержащий формирование зондирующих импульсов на ведущей станции, назначаемой заблаговременно, по которым запускаются синхронизирующие сигналы (пилот-сигналы), передачу синхронизирующих сигналов на ведомые станции по радиоканалу, излучение ведомыми станциями при поступлении на них синхронизирующих сигналов зондирующих импульсов, период следования зондирующих сигналов ведомых станций подстраивают под период зондирования ведущей станции с учетом времени прохождения зондирующих импульсов в среде распространения, при этом время запаздывания сигнала в среде распространения рассчитывают по формуле (1), при этом ведущая ГАС излучает зондирующие импульсы в соответствии с единым расписанием моментов излучения всех НК группы, передачу по радиоканалу синхронизирующих сигналов на ведомые ГАС осуществляют в виде цифрового кода моментов излучения ГАС, при этом период следования зондирующих импульсов ведущей ГАС рассчитывают из условия укладывания четырех периодов на интервале удвоенной длительности времени прохождения t зондирующего сигнала в водной среде от ведущей до ведомой ГАС, которое рассчитывается по формуле
где Д - расстояние между ГАС, с - скорость распространения сигнала в водной среде [6].
По известным дистанциям между носителями ГАС на флагманском корабле группы вычисляют время прохождения зондирующего сигнала до ведомых ГАС, которое используют при формировании расписания излучения ГАС. Цифровые коды рассчитанных моментов излучения по штатной радиолинии передают на остальные корабли группы, где с наступлением этих моментов ведомые ГАС излучают свои посылки. Этим обеспечивают отсутствие помех от ведущей ГАС на индикаторах ведомых ГАС. Для исключения помех от ведомых ГАС на индикаторе ведущей ГАС период излучения ведущей ГАС выбирают так, чтобы на интервале удвоенной длительности времени прохождения зондирующего сигнала от ведущей до ведомых ГАС укладывалось четыре периода излучения.
В интересах синхронизации ГАС для исключения помех ведущей ГАС от ведомых предлагается период следования зондирующих сигналов выбирать:

где n-целое число.
Для оптимального соотношения между шкалой дистанции и дальностью действия ГАС числом п авторами предлагается выбирать равным 4. Если n меньше 4, то дальность действия ГАС будет меньше шкалы дистанции, т.е. период следования зондирующих сигналов будет велик и часть шкалы будет просматриваться оператором впустую, так как обнаружение цели на этом участке шкалы невозможно.
С другой стороны, если выбрать n больше 4, то шкала дистанции, наоборот, становится меньше дальности действия ГАС, и возможности станции по обнаружению цели снижаются. Если n равно 4, то шкала дистанции равна дальности действия ГАС, т.е. создаются условия для отсутствия информационных потерь в процессе наблюдения.
Расписание излучения ГАС представляет собой последовательность кодов моментов излучения для каждой ГАС, рассчитанных с учетом вычисленного по формуле (1) времени распространения сигнала от ведущей до ведомой ГАС, вычисленного по формуле (2) периода следования зондирующих импульсов и заданного времени начала поиска.
В изобретении предлагается по радиоканалу передавать не сами синхронизирующие импульсы, а цифровой код момента их излучения, совпадающий с требуемым моментом излучения конкретной ГАС (из этих кодов и состоит расписание излучения ГАС). Это позволит устранить погрешности синхронизации, обусловленные случайным характером времени прохождения сигнала по радиоканалу (вызванным случайным временем ожидания в очереди запросов на передачу). В прототипе данная временная погрешность равна точности системы единого времени (СЕВ), которая не хуже тысячной доли секунды.
Описанный способ наиболее близок к предлагаемому по технической сущности и количеству общих признаков.
Недостатками его является ограниченная область применения и низкая надежность в условиях постановки противником радиопомех, что объясняется:
 невозможностью обеспечения беспомеховой работы в условиях воздействия непреднамеренных помех при расстоянии между судами, большем удвоенной средней дальности действия;
невозможностью обеспечения беспомеховой работы в условиях воздействия непреднамеренных помех при расстоянии между судами, большем удвоенной средней дальности действия;
 значением шкалы по дистанции строго равным Дш=До, что не учитывает вероятностный характер обнаружения цели в пределах зоны обзора и снижает эффективность поиска;
значением шкалы по дистанции строго равным Дш=До, что не учитывает вероятностный характер обнаружения цели в пределах зоны обзора и снижает эффективность поиска;
 невозможностью обеспечения синхронизации при низкой эффективности передачи данных по радиолинии (например, при расстоянии между НК, превышающем дальность радиосвязи, или в условиях постановки противником радиопомех [3]).
невозможностью обеспечения синхронизации при низкой эффективности передачи данных по радиолинии (например, при расстоянии между НК, превышающем дальность радиосвязи, или в условиях постановки противником радиопомех [3]).
Первый недостаток существенно ограничивает эффективность группы НК, т.к., как указывалось выше, оптимальное расстояние между судами определяется по тактическим соображениям, а также с учетом условий наблюдения.
Второй недостаток связан с тем, что авторами используется так называемый закон определенной дальности обнаружения, т.е. когда вероятность обнаружения Р равна 1 при дистанции до цели менее До и нулю, если дистанция до цели больше До [7]. Закон определенной дальности является весьма грубым приближением.
На самом деле дальность действия является случайной величиной, зависящей от условий наблюдения [8].
Дальность действия радиолокационных и гидроакустических средств, как правило, подчиняется нормальному закону в пределах зоны вероятного обнаружения целей (ЗВО).
Ширина ЗВО определяется, как [9]:
где Дmах=До+3σД - максимальная дальность действия;
Дmin=До-3σД - минимальная дальность действия;
σД - среднеквадратическое значение дальности действия, определяемое по данным испытаний и опыта эксплуатации ГАС.
Кроме того, необходимо учитывать мертвую зону Dмз, определяемую, как:

где Тс - длительность зондирующего сигнала.
В гидроакустике необходимо учитывать также реверберационную помеху, являющуюся нестационарной и маскирующую полезный сигнал. На определенных дистанциях после излучения зондирующего сигнала прием последнего невозможен вследствие малого отношения сигнал/помеха [10].
Задачей изобретения является расширение области применения и повышение надежности способа синхронизации корабельных гидроакустических станций.
Технический результат заключается в обеспечении уверенной синхронизации ГАС при любых расстояниях между судами, а также при постановке противником радиопомех.
Для решения поставленной задачи в известный способ синхронизации корабельных гидроакустических станций, при котором формируют зондирующие импульсы ведущей станцией, назначаемой заблаговременно, по которым запускают синхронизирующие сигналы (пилот-сигналы), передают синхронизирующие сигналы на ведомые станции по радиоканалу, излучают ведомыми станциями при поступлении на них синхронизирующих сигналов зондирующие импульсы, период следования зондирующих сигналов ведомых станций подстраивают под период зондирования ведущей станции с учетом времени прохождения зондирующих импульсов в среде распространения, при этом время запаздывания сигнала зондирующего импульса в среде распространения рассчитывают по формуле

где Д - расстояние между объектами-носителями, с - скорость распространения волн в среде, излучают ведущей ГАС зондирующие импульсы в соответствии с единым расписанием моментов излучения всех надводных кораблей группы, передачу по радиоканалу синхронизирующих сигналов на ведомые ГАС осуществляют в виде цифрового кода моментов излучения ГАС, введены новые операции, а именно: вводят регулируемую задержку момента излучения зондирующего импульса ведомой ГАС относительно момента излучения зондирующего импульса ведущей ГАС и регулируемый период обзора станций, величины которых определяются по дистанции между судами, а также заранее рассчитанными зоной вероятного обнаружения цели и реверберационной зоной
Для обеспечения комфортности работы оператора ГАС и снижения влияния непреднамеренных помех, появление которых вне ЗВО могут отвлекать его внимание, предлагается реализовать процедуру бланкирования мешающих сигналов на экране индикатора ведущей ГАС.
Под бланкированием понимается отключение приемника на время работы передатчика, не подлежащего пеленгованию, или на время действия импульсной мешающей помехи [11].
Наилучший результат получается, если передачу цифровых кодов моментов излучения зондирующих импульсов ГАС дополнительно осуществляют по гидроакустическому каналу.
Технический результат достигается за счет того, что при введении регулируемой задержки излучения зондирующих импульсов ведомыми ГАС относительно момента прихода мешающего сигнала от ведущей ГАС и регулируемого периода цикла обзора ГАС удается приводить помеху на участок экрана, не совпадающий с ЗВО. В результате, минимизируется информационный ущерб на индикаторе ведущей ГАС, а непреднамеренные помехи с высокой долей вероятности (не менее 97%) практически не окажут мешающего влияния на процесс наблюдения за целью.
Таким образом, в прототип вводятся новые процедуры:
 Оценка протяженности ЗВО.
Оценка протяженности ЗВО.
 Оценка протяженности реверберационной зоны.
Оценка протяженности реверберационной зоны.
 Введение регулируемой задержки в излучении ведомой ГАС относительно ведущей ГАС.
Введение регулируемой задержки в излучении ведомой ГАС относительно ведущей ГАС.
 Управление (при необходимости) величиной цикла обзора.
Управление (при необходимости) величиной цикла обзора.
 Бланкирование тракта приема ведущей ГАС.
Бланкирование тракта приема ведущей ГАС.
 Введение дополнительно гидроакустического канала для обмена данными между судами.
Введение дополнительно гидроакустического канала для обмена данными между судами.
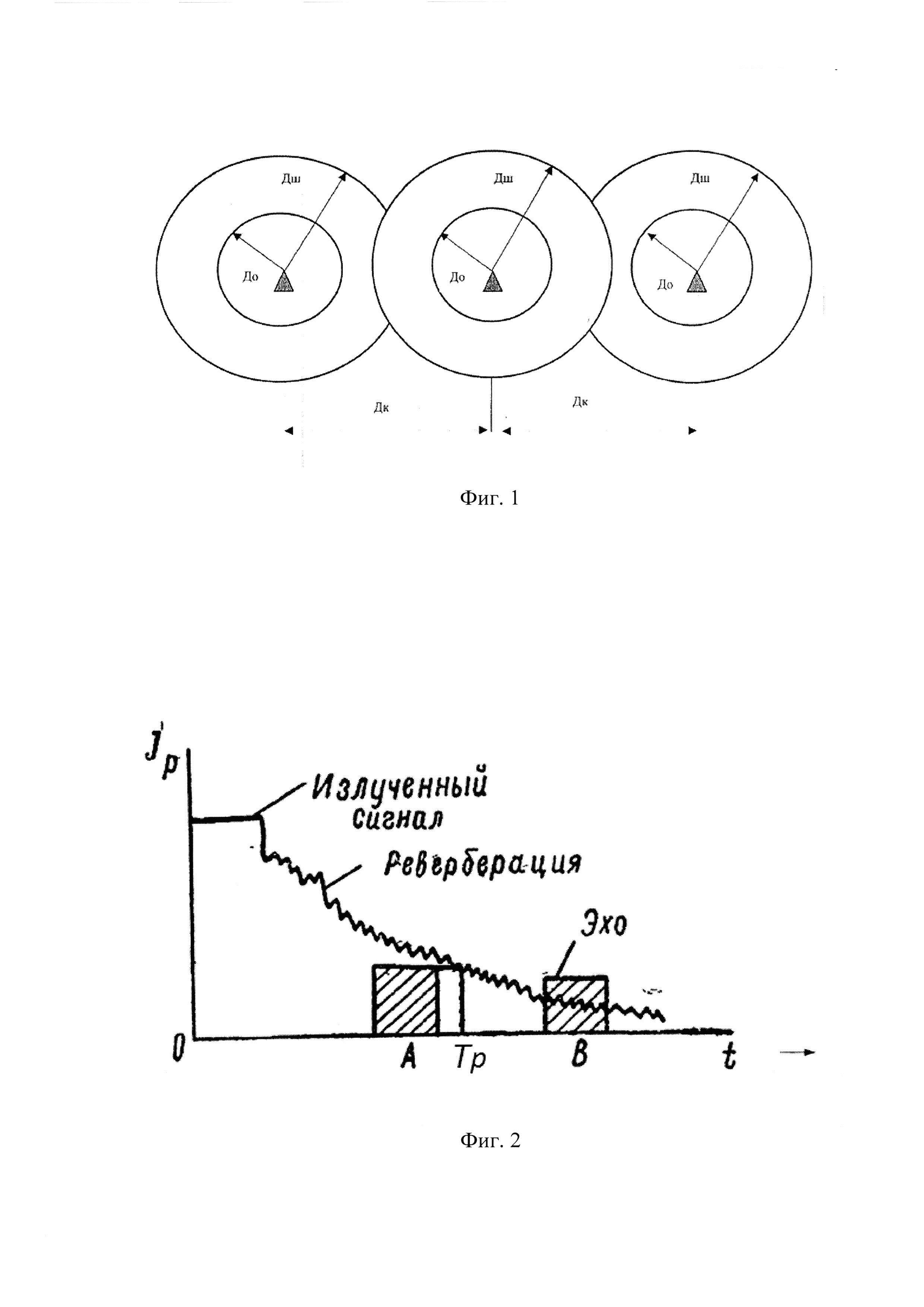
Сущность предлагаемого способа поясняется Фиг. 1 - Фиг. 4.
На Фиг. 1 изображено построение группы НК при поиске подводной цели, где Дк - расстояние между судами, До - прогнозируемая (ожидаемая) дальность действия ГАС, Дш - шкала дистанции ГАС, при этом ведущей ГАС может быть назначена любая станция.
На Фиг. 2 показан пример влияния реверберации на процесс обнаружения, где Jp - интенсивность реверберационной помехи, А и В - участки появления эхо-сигнала от цели, Тр - "реверберационная зона», в которой полностью маскируется полезный сигнал, и которой соответствует расстояние Δ Dp
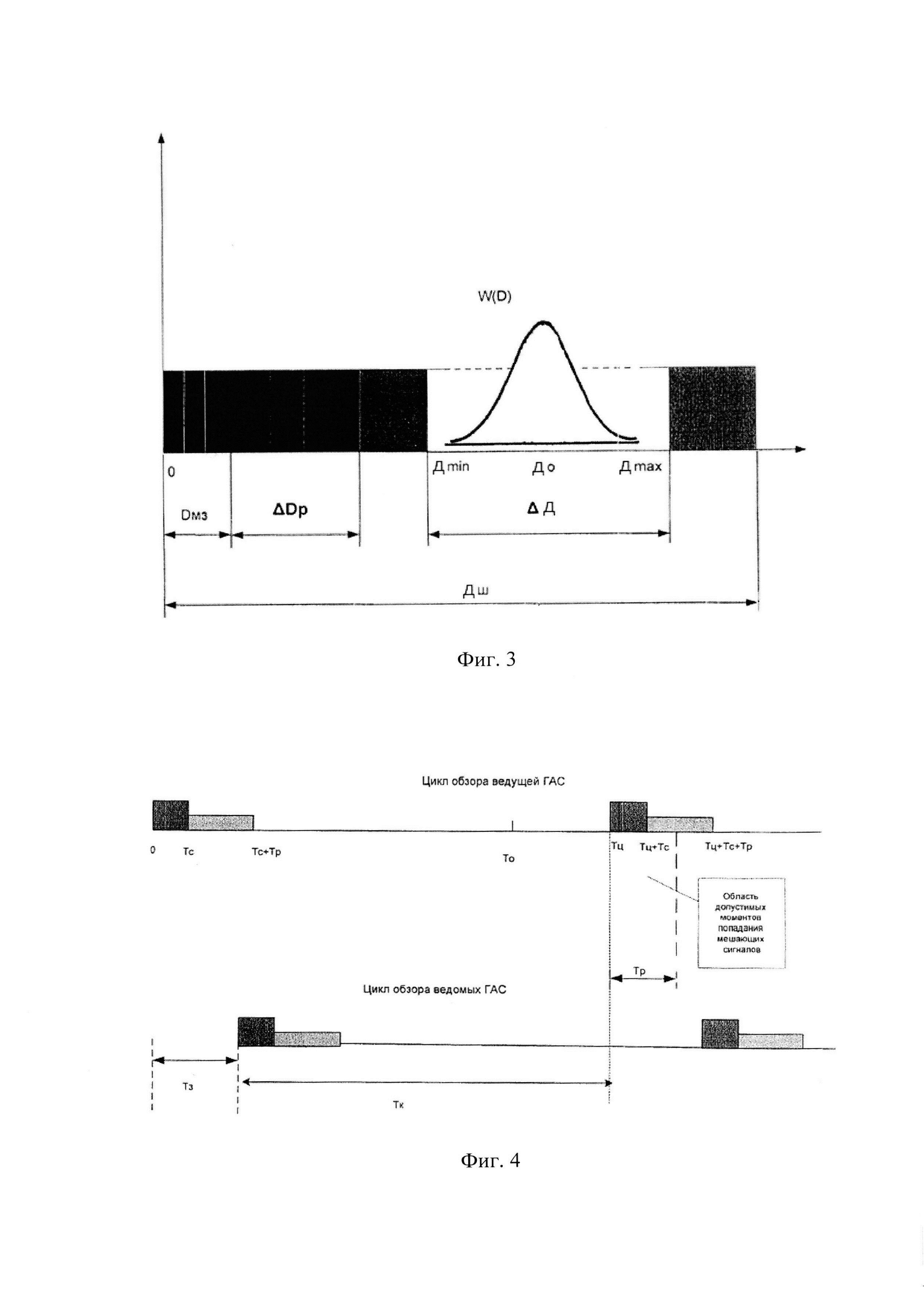
На Фиг. 3 показаны типовые участки зоны обзора ведущей ГАС, где Dмз - мертвая зона; Δ Dp - зона реверберации, в которой реверберация
маскирует как эхосигнал, так и непреднамеренную помеху; Δ Д - ширина зоны вероятного обнаружения цели; Дmin и Дmах - минимальная и максимальная дальность обнаружения цели; До - ожидаемая дальность действия ГАС; Дш - шкала дистанции; W(D) - закон распределения дальности (предполагаем нормальным).
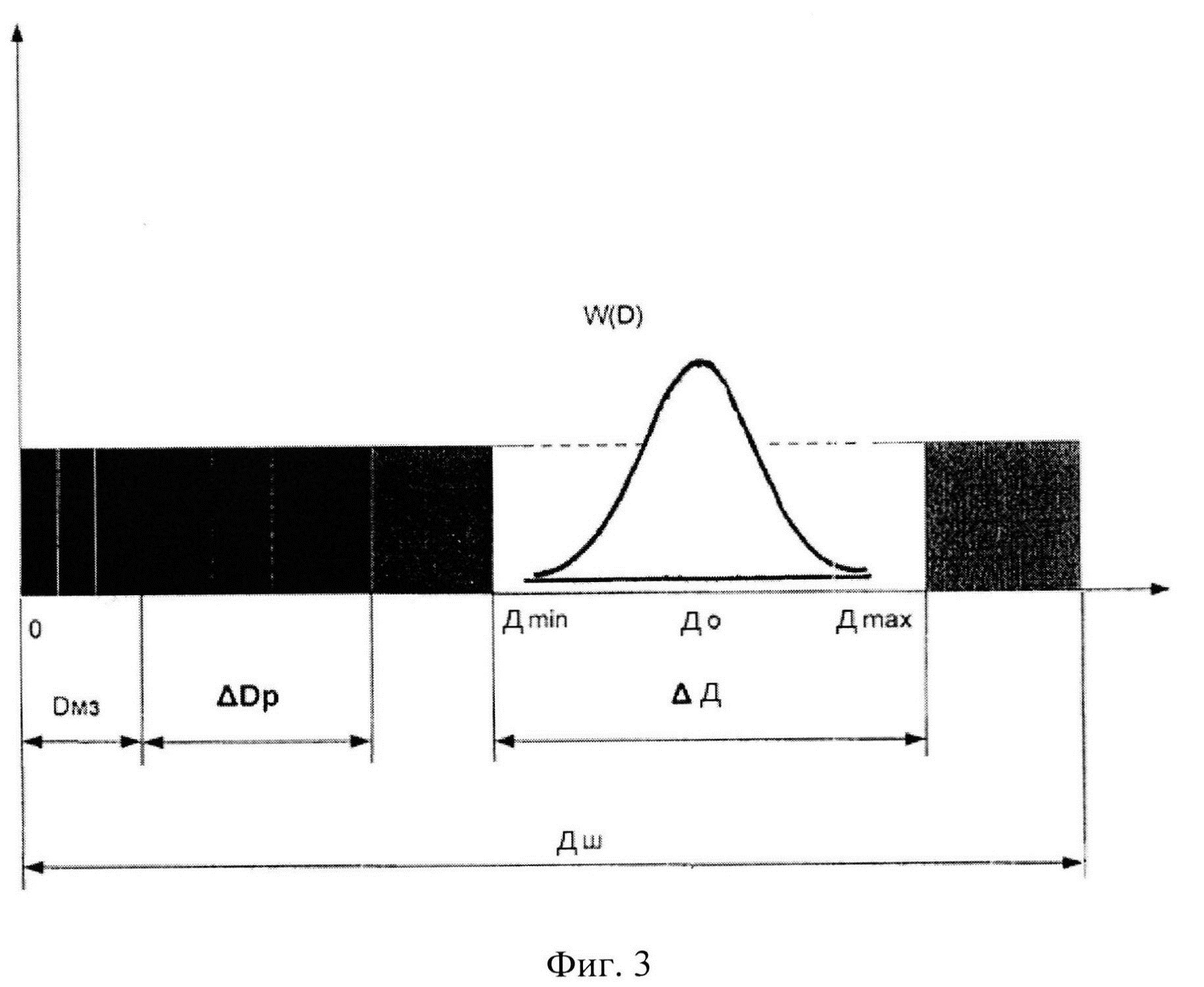
На Фиг. 4 показан пример поступления непреднамеренных помех от ведомой ГАС на временную шкалу ведущей ГАС при правильном выборе времени задержки в излучении ведомых ГАС для случая Дк≤mах.
На Фиг. 4 обозначено: Тс - длительность зондирующего сигнала; Тр - длительность реверберационной зоны; Тц - период обзора пространства; Тк - время запаздывания зондирующего импульса в водной среде; Тз - время задержки; То - время прихода эхо-сигнала с дистанции До на ведущую ГАС.
Предложенный способ реализуется следующим образом. После прибытия группы НК в район поиска подводной цели (Фиг. 1) операторы ГАС по конкретным гидролого-акустическим условиям - вертикальному разрезу скорости звука (зависимости скорости звука от глубины), собственных шумов НК и т.д. определяют шкалу дистанции Дш.
Далее производится оценка протяженности реверберационной зоны, в пределах которой обнаружение цели невозможно из-за малого отношения сигнал/помеха (Фиг. 2).
Рассчитывается ЗВО ГАС (Фиг. 3), после чего оператор рассчитывает и вводит в ведомую ГАС регулируемую задержку (Фиг. 4).
Условие выбора параметров синхронизации:

Величину цикла обзора для оптимизации обследования пространства целесообразно выбирать из условия

где Tmax=Дmах/с, (8).
В случае, если Дк>Дmах, целесообразно принять Тз=0, а величину цикла обзора из условия:

Однако предлагаемый способ синхронизации имеет ограничение, а именно, условие

При необходимости осуществляется регулировка шкалы дальности (цикла обзора), а также бланкирование тракта приема ведущей ГАС.
Синхронизация (передача синхронизирующих сигналов на ведомые ГАС) по радиоканалу дублируется передачей по гидроакустическому каналу.
Таким образом, при введении регулируемой задержки излучения зондирующих импульсов ведомыми ГАС относительно момента прихода мешающего сигнала от ведущей ГАС и регулируемого периода цикла обзора ГАС удается приводить помеху на участок экрана, не совпадающий с ЗВО, и, следовательно, достигается заявленный технический результат.
Источники информации
1. Абчук В.В., Суздаль В.Г. Поиск объектов. М.: Сов радио, 1977, С. 6-8.
2. Абчук В.В., Суздаль В.Г. Поиск объектов. М.: Сов радио, 1977, С. 201-205, 224-229.
3. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радиотехнической разведки. М., «Советское радио» 1968, С. 238-258.
4. Построение судового радиооборудования /под ред. В.И. Винокурова. - Л.: Судостроение, 1982, С. 171-172.
5. Электромагнитная совместимость радиоэлектронных средств и систем / под ред. Н.М. Царькова. - М.: Радио и связь, 1985, С 228-231.
6. Патент РФ №2225677 от 26.04.2001, МПК 7 Н04В 15/00. - Троскин А.Б., Ханин Л.Б.
7. Афанасьев А.А., Горбунов В.А. Эффективность обнаружения целей радиотехническими средствами наблюдения. - М.: Воениздат, 1964, С. 22-23.
8. Афанасьев А.А., Горбунов В.А. Эффективность обнаружения целей радиотехническими средствами наблюдения. - М.: Воениздат, 1964, С. 82.
9. Афанасьев А.А., Горбунов В.А. Эффективность обнаружения целей радиотехническими средствами наблюдения. - М.: Воениздат, 1964, С. 85-87.
10. Сташкевич А.П. Акустика моря. - Л.: Судостроение, 1966, С. 160-161.
11. ГОСТ 23288-78. Радиопеленгаторы. Термины и определения. С. 2.

Гидролокатор с трактом прослушивания эхо-сигналов
Гидроакустический способ управления торпедой
Концентратомер подвижных инфузорий в жидких средах
Гидролокационный способ классификации подводных объектов в контролируемой акватории
Способ определения параметров цели гидролокатором
Гидроакустический модуль сейсмокосы и способ его изготовления
Способ определения скорости звука гидролокатором по трассе распространения сигнала до цели
Устройство получения информации о шумящем в море объекте
Устройство и способ энергосбережения автономного приемопередатчика морского радиогидроакустического буя
Способ определения текущих координат цели в бистатическом режиме гидролокации
Гидроакустическая станция для надводного корабля
Бистатический способ обнаружения подводной цели и бистатический гидролокатор
Интегрированная система боевого управления нижней полусферы надводного корабля

