Результат интеллектуальной деятельности: СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНЫХ ОБЪЕКТОВ ПРИ ФОТОСЪЁМКЕ С БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА
Вид РИД
Изобретение
Изобретение относится к способам обработки аэрофотоснимков для координатной привязки обнаруживаемых наземных объектов.
Известен способ чтения аэроснимков при наличии топографической карты для определения военных объектов по их расположению относительно местных предметов и рельефа местности [1]. Способ предусматривает ручное определение и нанесение на карту границ участка, на котором изображены обнаруженные объекты. Недостатками способа являются отсутствие автоматизации и низкая точность координатной привязки.
Известен способ получения фотоосновы высокого разрешения для создания топографических карт и планов по данным беспилотных летательных аппаратов (БЛА) [2]. Способ требует использования дорогостоящих фотокамер, а также специальных алгоритмов и программ постобработки материалов фотосъемки. Недостатками способа являются низкая оперативность обработки и отсутствие функции координатной привязки обнаруженных наземных объектов в реальном (близком к реальному) масштабе времени.
Известен способ определения координат фотографируемых с космического аппарата наземных объектов [3]. Способ заключается в регистрации на снимке с помощью ручных фотосъемочных средств не менее четырех характерных, ранее идентифицированных объектов и обнаруженного (опознаваемого) объекта с последующим построением веера лучей направлений из характерных объектов на обнаруженный. Координаты последнего находятся как среднеарифметическое координат точек пересечения лучей. По своей сути способ представляет собой трудоемкую процедуру ручного приведения оператором снимка земной поверхности в центральной проекции к фотоплану в ортогональной проекции (ортофотоплану) с одновременным масштабированием и ориентированием снимка по системе координат ортофотоплана. Подобная процедура автоматически выполняется стандартными программными средствами современных геоинформационных систем (ГИС). Указанный недостаток, а также низкая точность способа делают его непригодным для применения в составе комплексов БЛА.
Наиболее близким к заявляемому изобретению является способ, реализованный в системе определения координат точек местности на видеоизображении при съемке с борта БЛА [4]. Для решения указанной задачи определения координат предлагается использовать следующие бортовые модули (системы по терминологии прототипа [4]): спутниковой навигации, инерциальной навигации (ориентации), передачи данных, синхронизации, а также видеокамеру в режиме стоп-кадра (по сути фотокамеру). Привлекаются также наземные вычислительный модуль (система) и модуль приема данных. Передаваемые данные (телеметрическая информация) содержат синхронизированные изображение с камеры, координаты и высоту с модуля спутниковой навигации. Очевидно, по умолчанию предполагается также передача путевого угла, поскольку это предусмотрено практически во всех существующих комплексах БЛА. Описание сущности реализованного способа ограничивается в [4] указанием, что наземная вычислительная система производит трансформацию системы координат снимка, а также изложением желаемого эффекта: «Пользователь на экране монитора в реальном времени видит картинку и, кликнув мышкой на любой объект, может определить его координаты». Недостатком способа прототипа [4] является то, что в нем лишь декларируется принципиальная возможность оперативного, высокоточного определения координат наземных объектов при фотосъемке с БЛА без математического обоснования практических аспектов реализации. По сути [4] представляет собой краткую словесную формулировку желаемого конечного результата, полезность которого очевидна.
Цель заявляемого изобретения состоит в создании простого в реализации, математически обоснованного способа, обеспечивающего оперативную, высокоточную координатную привязку наземных объектов при фотосъемке с БЛА.
Для достижения указанной цели в способе определения координат наземных объектов при фотосъемке с беспилотного летательного аппарата (далее аппарата), заключающемся в том, что на аппарате устанавливают бортовую систему в составе модуля спутниковой навигации, инерциального модуля угловой ориентации, цифровой фотокамеры, модуля передачи данных и модуля синхронизации, совместно с бортовой системой используют наземную систему в составе модуля приема данных и вычислительного модуля, с помощью бортовой системы формируют передаваемые данные в составе синхронизированных фотоснимков и определяемых модулем спутниковой навигации координат, путевого угла и высоты аппарата, при фотосъемке с помощью инерциального модуля угловой ориентации обеспечивают совмещение центра прямоугольного фотоснимка и направления его вертикальных (боковых) сторон соответственно с координатами и продольной осью аппарата, с помощью вычислительного модуля по значениям высоты аппарата и углового поля зрения фотокамеры определяют длину диагонали фотографируемого прямоугольного участка местности, по значениям длины диагонали и отношения длин горизонтальной и вертикальной сторон фотоснимка в пикселах вычисляют длины соответствующих сторон участка, по значениям вычисленных длин сторон участка определяют угол между диагональю участка и продольной осью аппарата, по значениям координат и путевого угла аппарата, длины диагонали участка и угла между диагональю участка и продольной осью аппарата вычисляют координаты вершин фотографируемого участка, по значениям вычисленных координат вершин выполняют совмещение фотоснимка с соответствующим участком встроенной в вычислительный модуль цифровой карты местности, при этом координаты наземных объектов определяют путем считывания с цифровой карты координат центров их изображений на совмещенном с картой фотоснимке.
Технический результат заключается в обеспечении оперативного и высокоточного определения координат наземных объектов при фотосъемке с БЛА.
Заявляемый способ заключается в следующем.
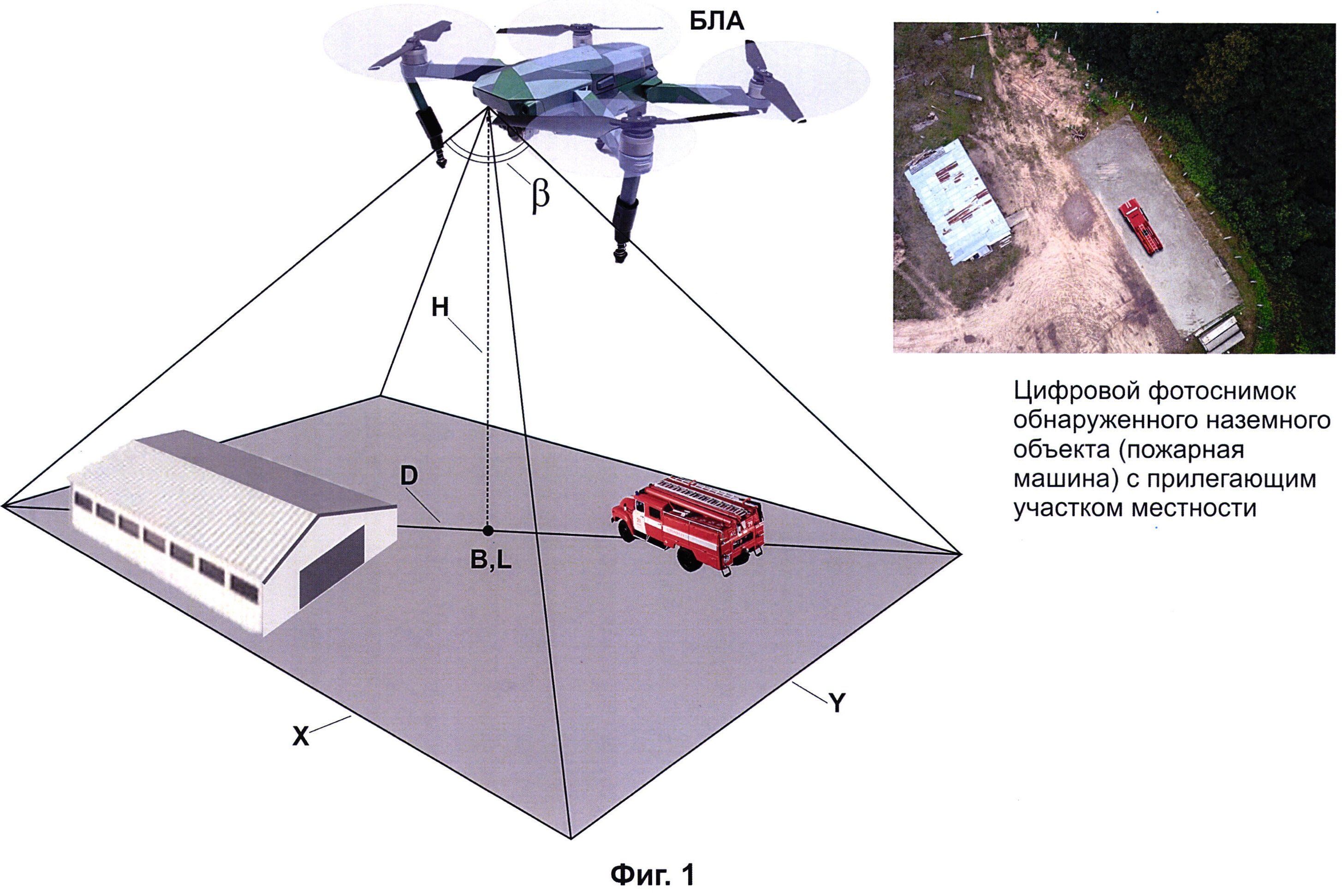
При совмещении центра прямоугольного фотоснимка и направления его вертикальных сторон соответственно с географическими координатами В, L (широта, долгота) и продольной осью аппарата (фотокамера в положении надира) длина диагонали фотографируемого участка местности D определяется по формуле (см. далее Фиг. 1):

где Н - высота аппарата, β - угловое поле зрения фотокамеры.
По значениям диагонали D и отношения длин горизонтальной Хпикс и вертикальной Yпикс сторон фотоснимка в пикселах, известных из технических характеристик фотокамеры, вычисляют длины соответствующих сторон участка:

По значениям сторон X, Y определяют угол γ между диагональю участка и продольной осью аппарата:

Далее выполняют определение азимутов Ai, i=1, 4 направлений из центра на вершины фотографируемого участка (см. Фиг. 2):

где α - путевой угол аппарата, по значениям которых, а также величинам диагонали D и координат аппарата B,L вычисляют координаты B1, L1 вершин фотографируемого участка местности:

где λ - длина дуги в 1 градус, λ=6378136π/180. Здесь 6378136 м - экваториальный радиус общеземного эллипсоида ПЗ-90.11.
По значениям координат Bi, Li выполняют совмещение фотоснимка с соответствующим участком цифровой карты (см. Фиг. 3), с которого в итоге считывают координаты центров изображений наземных объектов (см. Фиг. 4). Считывание выполняется в реальном времени автоматически. Возможен вариант считывания координат оператором БЛА вручную.
Существенные отличительные признаки заявляемого способа по сравнению с прототипом заключаются в следующем:
1. Математический аппарат, представленный короткой последовательностью несложных вычислительных операций (1)-(5), обеспечивает простоту реализации и оперативность применения заявляемого способа.
В прототипе математический аппарат расчета отсутствует.
2. По значениям вычисленных координат вершин фотографируемого участка выполняют совмещение фотоснимка с соответствующим участком встроенной в вычислительный модуль цифровой карты местности. Этим обеспечивается совместная обработка материалов фотосъемки и имеющейся геодезической основы - цифровой карты или ортофотоплана.
В прототипе задача совмещения фотоснимка и цифровой карты не рассматривается.
3. Координаты наземных объектов определяют путем считывания с цифровой карты координат центров их изображений на совмещенном с картой фотоснимке. Точность считывания определяется точностью используемой геодезической основы. Поскольку современные цифровые карты и ортофотопланы являются высокоточными, этим обеспечивается высокая итоговая точность координатной привязки объектов.
В прототипе рассмотрение этой задачи ограничивается общей фразой: «Пользователь …, кликнув мышкой на любой объект, может определить его координаты». Вопрос о точности привязки не обсуждается.
Заявляемое изобретение иллюстрируют следующие графические материалы.
Фиг. 1. Общая схема определения координат наземного объекта при фотосъемке с БЛА.
Фиг. 2. Азимуты вершин фотографируемого участка местности (Фиг. 2а - при нулевом путевом угле α=0, Фиг. 2б - при отличном от нуля угле α).
Фиг. 3. Фазы совместной обработки фотоснимка и участка цифровой карты местности (Фиг. 3а - наложение фотоснимка на участок карты, Фиг. 3б - совмещение фотоснимка с участком карты с автоматизированным масштабированием, сдвигом и поворотом).
Фиг. 4. Программная координатная привязка путем считывания координат с карты наложением перекрестия на центр изображения наземного объекта.
Техническая реализация заявляемого способа не вызывает сложности, поскольку необходимые аппаратурные и программные компоненты бортовой и наземной систем имеются в составе практически всех существующих комплексов БЛА, как самолетного, так и мультикоптерного типа.
Все дополнительные средства могут быть реализованы в виде специального программного блока взаимодействия со штатной ГИС, встроенного в состав программного обеспечения наземного вычислительного модуля.
Таким образом, заявляемый способ может быть реализован и обеспечивает оперативность и высокую точность определения координат наземных объектов при фотосъемке с БЛА.
Источники информации:
1. miltop.narod.ru/Snapshot/scheduled.htm
2. gisinfo.ru/techno/photoscan.htm
3. Патент RU 2587539.
4. Мамутин A.M. Система определения координат точек местности на видеоизображении при съемке с борта беспилотного летательного аппарата / Сборник статей по материалам международного научного конгресса «Интерэкспо Гео-Сибирь», 2010, том 4. - Изд.: ФГБОУВО «Сибирский государственный университет геосистем и технологий».
Способ определения координат наземных объектов при фотосъемке с беспилотного летательного аппарата, заключающийся в том, что на аппарате устанавливают бортовую систему в составе модуля спутниковой навигации, инерциального модуля угловой ориентации, цифровой фотокамеры, модуля передачи данных и модуля синхронизации, совместно с бортовой системой используют наземную систему в составе модуля приема данных и вычислительного модуля, с помощью бортовой системы формируют передаваемые данные в составе синхронизированных фотоснимков и определяемых модулем спутниковой навигации координат, путевого угла и высоты аппарата, отличающийся тем, что при фотосъемке с помощью инерциального модуля угловой ориентации обеспечивают совмещение центра прямоугольного фотоснимка и направления его вертикальных (боковых) сторон соответственно с координатами и продольной осью аппарата, с помощью вычислительного модуля по значениям высоты аппарата и углового поля зрения фотокамеры определяют длину диагонали фотографируемого прямоугольного участка местности, по значениям длины диагонали и отношения длин горизонтальной и вертикальной сторон фотоснимка в пикселах вычисляют длины соответствующих сторон участка, по значениям вычисленных длин сторон участка определяют угол между диагональю участка и продольной осью аппарата, по значениям координат и путевого угла аппарата, длины диагонали участка и угла между диагональю участка и продольной осью аппарата вычисляют координаты вершин фотографируемого участка, по значениям вычисленных координат вершин выполняют совмещение фотоснимка с соответствующим участком встроенной в вычислительный модуль цифровой карты местности, при этом координаты наземных объектов определяют путем считывания с цифровой карты координат центров их изображений на совмещенном с картой фотоснимке.



Способ измерения магнитного курса подвижного объекта
Устройство магнитной дефектоскопии рельсов
Способ ультразвукового контроля подошвы рельсов
Измеритель магнитного дефектоскопа протяженного изделия сложной формы
Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний
Способ определения истинного курса подвижного объекта
Способ полевой калибровки магнитного компаса
Модульная информационная система парашютиста
Способ оценки дефекта в головке рельса
Способ оценки коррозионного повреждения подошвы рельса
Способ определения местоположения наземного подвижного объекта
Способ определения зоны досягаемости парашютистом целевой точки приземления
Система портативных комплектов для автоматизированного целеуказания на поле боя
Переносный робототехнический комплекс огневой поддержки и боевого обеспечения
Способ корректировки огня артиллерии с использованием мультикоптера

