Результат интеллектуальной деятельности: АВТОНОМНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ПОДДЕРЖКОЙ НАПРАВЛЕНИЯ
Вид РИД
Изобретение
РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка испрашивает приоритет заявки на патент США №14/711506, поданной 13 мая 2015 года под названием "АВТОНОМНОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ПОДДЕРЖКОЙ НАПРАВЛЕНИЯ СО СТОРОНЫ ТРАНСПОРТНЫХ СРЕДСТВ, УПРАВЛЯЕМЫХ ЧЕЛОВЕКОМ", заявки на патент США №14/711602, поданной 13 мая 2015 года под названием "ВЫБОР ТИПА ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ТРАНСПОРТИРОВКИ", и заявки на патент США №14/711570, поданной 13 мая 2015 года под названием "ПРЕДОСТАВЛЕНИЕ УДАЛЁННОЙ ПОДДЕРЖКИ АВТОНОМНОМУ ТРАНСПОРТНОМУ СРЕДСТВУ"; вышеупомянутые заявки включены в настоящее описание посредством ссылки во всей их полноте.
УРОВЕНЬ ТЕХНИКИ
[0002] Автономные транспортные средства в настоящее время существуют как экспериментальные модели или как прототипы. На этих транспортных средствах вместо человека-водителя действуют датчики и компьютеризированные системы искусственного интеллекта. В соответствии с известной технологией автономные транспортные средства могут легко справляться с управлением различными транспортными средствами на таких дорогах, как автострады. Однако городские условия могут создавать проблемы для автономных транспортных средств, отчасти потому, что в условиях скученности могут возникать ошибки в интерпретации информации от датчиков.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0003] ФИГ. 1 показывает различные примеры гибридных сервисов, которые используют автономные транспортные средства совместно с людьми-операторами в соответствии с вариантами осуществления изобретения.
[0004] ФИГ. 2 показывает пример системы для реализации транспортного средства, управляемого человеком и осуществляющего поддержку направления для автономного транспортного средства.
[0005] ФИГ. 3 показывает пример системы предоставления транспортировки, которая целесообразно выбирает, предоставлять для выполнения запроса на транспортировку транспортное средство, управляемое человеком, или автономное транспортное средство.
[0006] ФИГ. 4 показывает пример системы, использующей людей-операторов для поддержки автономных транспортных средств при обработке и/или интерпретации событий или состояний на дороге.
[0007] ФИГ. 5 показывает интерфейсную систему транспортного средства, управляемого человеком, для использования с примерами, как описано здесь.
[0008] ФИГ. 6 показывает пример компьютерной системы, на которой могут быть реализованы один или несколько примеров.
[0009] ФИГ. 7 показывает пример способа, который может быть реализован на автономном транспортном средстве с целью получения направления, осуществляемого человеком.
[0010] ФИГ. 8 показывает пример способа, который может быть реализован в сервисе для сопряжения автономного транспортного средства с транспортным средством, управляемым человеком, с целью получения направления, осуществляемого человеком.
[0011] ФИГ. 9 показывает пример способа выдачи команд человеком-оператором для управления транспортным средством с целью поддержки автономного транспортного средства.
[0012] ФИГ. 10 показывает пример реализации гибридной транспортной услуги, при которой направление автономного транспортного средства осуществляет транспортное средство, управляемое человеком.
[0013] ФИГ. 11А-11C показывают примеры интерфейсов для отдачи команд ведения транспортному средству человеком-оператором при направлении автономного транспортного средства.
[0014] ФИГ. 12 показывает пример способа рационального выбора типа транспортного средства для транспортной услуги.
[0015] ФИГ. 13 показывает пример способа работы автономного транспортного средства для получения поддержки от удалённого человека-оператора.
[0016] ФИГ. 14 показывает пример способа работы удалённого сервиса для реагирования на предупреждения от автономного транспортного средства.
[0017] ФИГ. 15 показывает пример пользовательского интерфейса, обеспечивающего человеку-оператору быстрый ввод для облегчения работы автономного транспортного средства, когда обнаружено событие или состояние, влияющее на степень надёжности применительно к безопасности.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0018] Согласно некоторым примерам автономное транспортное средство работает при поддержке направления этого средства со стороны транспортного средства, управляемого человеком. В одном аспекте поддержку направления обеспечивает транспортное средство, управляемое человеком, при обнаружении того, что автономное транспортное средство не может более безопасно продвигаться по своему маршруту. Например, автономное транспортное средство может столкнуться с проведением строительных работ, публичного мероприятия или с ситуацией, которая не определяется должным образом датчиками или которую бортовая система искусственного интеллекта этого транспортного средства не может надлежащим образом интерпретировать. В таких ситуациях некоторые описанные примеры предусматривают, что автономное транспортное средство должно быть связано с транспортным средством, управляемым человеком, чтобы пройти через участок, который автономное транспортное средство не интерпретирует надлежащим образом.
[0019] В некоторых примерах определяют степень надёжности для автономного транспортного средства, которая указывает на способность автономного транспортного средства безопасно продвигаться по запланированному или текущему маршруту к месту назначения. Если полученная степень надёжности ниже порогового значения, то выбирают транспортное средство, управляемое человеком, чтобы провести автономное транспортное средство, по меньшей мере, по части запланированного или текущего маршрута. Автономным транспортным средством можно управлять так, чтобы оно отслеживало второе транспортное средство при прохождении через часть запланированного или текущего маршрута.
[0020] Кроме того, в некоторых примерах транспортные средства, управляемые людьми, могут быть выбраны для оказания помощи автономным транспортным средствам путём сбора информации о дорожном полотне и дорожных условиях, которые в противном случае могли бы помешать безопасному прохождению автономных транспортных средств. В соответствии с одним аспектом транспортное средство, управляемое человеком, может быть оснащено набором датчиков, которые могут получать информацию от датчиков на определённых дорогах. Информация от датчиков с транспортного средства, управляемого человеком, может быть использована для выявления участков дороги с дорожными условиями, имеющими достаточно высокую вероятность ухудшения безопасности перемещения автономного транспортного средства по одному или нескольким участкам дороги. Информация может быть получена из информации датчиков для оказания помощи автономным транспортным средствам при их прохождении участков дороги, которые, как было определено, имеют выявленные дорожные условия. Эта информация может содержать, например, команды по навигации для автономного транспортного средства или команды, позволяющие автономному транспортному средству интерпретировать информацию от датчиков.
[0021] Другие примеры включают в себя систему по предоставлению транспортных услуг для пользователя, принимающей целесообразное решение относительно того, должно ли транспортное средство для обеспечения транспортировки быть управляемым человеком или автономным. В одном аспекте работает система предоставления транспортировки, предназначенная для получения от пользователя запроса на транспортировку и выбора типа транспортного средства для пользователя, основываясь, по меньшей мере, частично на наборе критериев, связанных с запросом на транспортировку или с информацией о пользователе. Например, определение того, должно ли быть предоставлено автономное транспортное средство, может быть основано, по меньшей мере, частично, на пункте назначения, указанном в запросе на транспортировку.
[0022] Наряду с достоинствами некоторые примеры, описанные здесь, предусматривают, что дороги в целом и городские магистрали, в частности, представляют собой проблему для автономных транспортных средств, связанную с неизвестным состоянием или событием. Среди преимуществ и технических достоинств, показываемых в описанных примерах, сервис может связывать автономное транспортное средство с транспортным средством, управляемым человеком, чтобы облегчить навигацию автономного транспортного средства на дороге, которая является относительно неизвестной или сложной. Таким образом, автономное транспортное средство может упростить свои собственные операции, просто отслеживая другое транспортное средство вместо того, чтобы пытаться сориентироваться в неизвестной или сложной ситуации.
[0023] Согласно другому примеру система предоставляет поддержку автономным транспортным средствам со стороны человека. Согласно одному аспекту обнаружено некоторое событие, которое снижает степень надёжности автономного транспортного средства, двигающегося по маршруту. В ответ на обнаружение этого события автономное транспортное средство передаёт информацию о нём в удалённый центр направления. Автономное транспортное средство может получить команды от удалённого центра направления на обработку данного события. Затем автономное транспортное средство может реализовать команды по обработке события по мере его проявления.
[0024] Согласно некоторым вариантам сервис со стороны людей-операторов может быть реализован в виде удалённого центра направления для транспортного средства. Для терминала оператора может быть создан пользовательский интерфейс, чтобы отображать информацию, имеющую отношение к событию, обнаруженному транспортным средством. В некоторых вариантах пользовательский интерфейс может отображать предварительно заданные опции, из которых оператор может сделать выбор, и выбранная опция затем может быть преобразована в команды для автономного транспортного средства при его обработке события.
[0025] Как используется здесь, клиентское, водительское и/или компьютерное устройство являются устройствами, соответствующими настольным компьютерам, сотовым устройствам или смартфонам, персональным цифровым помощникам (PDA), портативным компьютерам, планшетным и телевизионным устройствам (IP-телевидение) и т.д., которые могут обеспечить сетевое подключение и ресурсы обработки для связи с системой по сети. Водительским устройством может быть также клиентское аппаратное обеспечение, встроенные в автомобиль приборы или бортовые компьютеры и т.п. Клиентское и/или водительское устройство может также управлять назначенным приложением, сконфигурированным для связи с системой предоставления услуг.
[0026] Хотя некоторые примеры, описанные здесь, относятся к транспортным услугам, система предоставления услуг может включать в себя другие сервисы "по запросу" на основе определения местоположения (например, услуга автокухни, служба доставки, развлекательные услуги), которые должны быть организованы между отдельными лицами и поставщиками услуг. Например, любой пользователь может запросить сервис "по запросу", такой как служба доставки (например, доставка еды, курьерское обслуживание, услуга автокухни или доставка товаров) или развлекательная услуга (например, группа уличных музыкантов, струнный квартет) с использованием этой системы, и система может выбрать поставщика услуг, например, водителя или транспортное средство, поставщика продуктов питания, группу музыкантов и т.д., чтобы предоставить услугу "по запросу" этому пользователю.
[0027] Один или несколько вариантов осуществления, описанных здесь, предусматривают, что способы, методы и действия, выполняемые компьютерным устройством, выполняются программно или как способ, реализуемый компьютером. Используемый термин "программно" здесь означает использование кода или исполняемых компьютером команд. Эти команды могут храниться в одном или нескольких запоминающих устройствах компьютера. Программно выполненный шаг может быть автоматическим или неавтоматическим.
[0028] Один или несколько вариантов осуществления, описанных здесь, могут быть реализованы с использованием программных модулей, процессоров или компонентов. Программный модуль, процессор или компонент могут включать в себя программу, подпрограмму, часть программы или компонент программного обеспечения или компонент аппаратного обеспечения, способный выполнять одну или несколько заявленных задач или функций. Как использовано здесь, некоторый модуль или компонент может существовать на компоненте аппаратного обеспечения независимо от других модулей или компонентов. Альтернативно некоторый модуль или компонент может быть совместно используемым элементом или процессом других модулей, программ или машин.
[0029] Некоторые описанные здесь варианты осуществления обычно могут требовать использования компьютерных устройств, включая ресурсы обработки и памяти. Например, один или несколько вариантов осуществления, описанные здесь, могут быть реализованы полностью или частично на компьютерных устройствах, таких как серверы, настольные компьютеры, сотовые телефоны или смартфоны, персональные цифровые помощники (например, карманные компьютеры), портативные компьютеры, принтеры, рамки для цифровых изображений, сетевое оборудование (например, маршрутизаторы) и планшетные устройства. Все ресурсы памяти, обработки и сети могут быть использованы в связи с установлением, использованием или выполнением любого описанного здесь варианта осуществления (в том числе с выполнением любого способа или с внедрением любой системы).
[0030] Кроме того, один или несколько вариантов осуществления, описанных здесь, могут быть реализованы посредством использования команд, исполняемых одним или несколькими процессорами. Эти команды могут быть размещены на машиночитаемом носителе. Машины, показанные или описанные на рисунках далее, содержат примеры машиночитаемых носителей и ресурсов обработки, на которых можно переносить и/или выполнять команды для реализации вариантов осуществления данного изобретения. В частности, многочисленные машины, показанные с вариантами осуществления изобретения, включают в себя процессор(ы) и различные формы памяти для хранения данных и команд. Примеры машиночитаемых носителей включают в себя постоянные запоминающие устройства, такие как жёсткие диски на персональных компьютерах или серверах. Другие примеры компьютерных носителей данных включают в себя портативные запоминающие устройства, такие как компакт- или ДВД-диски, флэш-память (например, такую, которая имеется на смартфонах, многофункциональных устройствах или на планшетах), и магнитную память. Все компьютеры, терминалы, устройства с поддержкой сети (например, мобильные устройства, такие как сотовые телефоны) являются примерами машин и устройств, которые используют процессоры, память и команды, хранящиеся на машиночитаемых носителях. Кроме того, варианты осуществления могут быть реализованы в форме компьютерных программ или используемого на компьютере носителя, способного переносить такую программу.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0031] ФИГ. 1 показывает различные примеры гибридных сервисов, которые используют автономные транспортные средства вместе с людьми-операторами в соответствии с вариантами осуществления изобретения. В примере на фиг. 1 система автономного транспортного средства ("САТС 100") включает в себя компьютер или систему обработки, предназначенные для обработки информации от датчиков на транспортном средстве с целью обеспечения взаимодействия с автономным транспортным средством 101 и управления им. Дополнительно САТС 100 может содержать другие функции, в том числе возможности беспроводной связи, чтобы отправлять беспроводные сообщения на один или несколько удалённых центров и/или принимать сообщения от такого центра или таких центров, например, предоставляемых удалёнными сервисами 50 согласно фиг. 1. При управлении автономным транспортным средством 101 САТС 100 может выдавать команды и данные, которые программно управляют различными электромеханическими интерфейсами транспортного средства, чтобы контролировать различные аспекты движения транспортного средства, такие как ускорение, торможение, рулевое управление и вспомогательное оборудование (например, включение осветительных приборов).
[0032] В примере на фиг. 1 САТС 100 связывается с любым из нескольких возможных удалённых сервисов 50, чтобы обеспечить гибридный сервис или функциональность, которая объединяет использование или работу автономного транспортного средства 101 с ресурсами, управляемыми человеком. Результирующий гибридный сервис или функция автономного транспортного средства 101 имеет многие недостатки автономных транспортных средств в целом, особенно когда такие транспортные средства используются в контексте транспортных услуг.
[0033] В частности, некоторые варианты осуществления, как описано, предполагают, что автономные транспортные средства, если они пойдут в производство в их нынешнем виде, будут относительно неудобными для транспортировки людей (по сравнению с транспортными устройствами, управляемыми человеком) при повседневном использовании в городах. А именно: некоторые варианты осуществления предусматривают, что автономные транспортные средства имеют тенденцию или необходимость часто останавливаться или замедляться, чтобы обрабатывать информацию о своём окружении и распознавать объекты, события или состояния. Торможение и движение с меняющейся скоростью у таких транспортных средств вызывает ощущение дискомфорта у пассажиров.
[0034] Кроме того, городские условия вождения создают серьёзные проблемы для автономных транспортных средств. В городских условиях такие события, как дорожное строительство, общественные мероприятия, дорожные препятствия и чрезвычайные ситуации, постоянно требуют внимания водителя и анализа окружающей среды. Приведённые здесь примеры предусматривают, что эффективность автономных транспортных средств в городских условиях может быть ограничена возможностью этих средств распознавать и адекватно оценивать то, как обрабатывать многочисленные ежедневные события насыщенного явлениями окружения.
[0035] В примере на фиг. 1 удалённые сервисы 50 могут включать в себя услуги, доступные для автономного транспортного средства 101 в одной или нескольких сетях, таких как сотовые и/или интернет. Удалённые сервисы 50 используют человеческие ресурсы для устранения недостатков автономных транспортных средств, как это показано в вариантах осуществления, описанных здесь, когда такие транспортные средства используются с транспортными услугами. В примере на фиг. 1 удалённые сервисы 50 включают в себя сервис 10 предоставления транспортировки, сервис 20 поддержки в управлении со стороны транспортного средства, управляемого человеком, и удалённый сервис 30 поддержки со стороны человека-оператора. Каждый из сервисов - сервис 10 предоставления транспортировки, сервис 20 поддержки в управлении со стороны транспортного средства, управляемого человеком, или удалённый сервис 30 поддержки со стороны человека-оператора - или другой сетевой сервис может включать в себя или иным образом использовать соответствующий интерфейс 90 человека-оператора. Как описано в различных примерах, интерфейс 90 человека-оператора каждого удалённого сервиса 50 может получить доступ к общему фонду 92 человеческих ресурсов и использовать его для гибридизации услуги, предоставляемой автономному транспортному средству 101. Среди других функций интерфейс 90 человека-оператора может координировать и иным образом использовать человеческие ресурсы для облегчения работы и применения автономного транспортного средства 101.
[0036] Согласно некоторым примерам автономное транспортное средство 101 включает в себя САТС 100, а также набор датчиков, позволяющих САТС воспринимать окружающую её среду и условия работы. Датчики автономного транспортного средства 101 взаимодействуют с САТС 100 для обеспечения компьютеризированного восприятия пространства и окружающей среды, окружающих автономное транспортное средство 101. Аналогично САТС 100 может работать на автономном транспортном средстве 101 для приёма данных от датчиков из комплекта датчиков и для управления различными электромеханическими интерфейсами для управления транспортным средством на дорогах.
[0037] В соответствии с одним аспектом САТС 100 включает в себя один или несколько компонентов 105 интерфейса датчиков, компонент 110 анализа датчиков, подсистему 130 интерфейса (или управления) транспортного средства и контроллер 144. Компонент 110 анализа датчиков включает в себя программу 120 определения события для обнаружения событий и состояний на дороге, по которой двигается автономное транспортное средство 101.
[0038] Множество датчиков 102, 104, 106, 108 работает для совместного получения полного обзора от датчиков транспортного средства, а также для получения информации о том, что находится в ближайшем окружении транспортного средства и вблизи или далее впереди по пути его движения. Например, множество датчиков 102, 104, 106, 108 включает в себя множество наборов датчиков 102 камер (видеокамера, стереоскопические пары камер или камеры восприятия глубины, камеры дальнего действия), датчики дистанционного обнаружения, такие как представленные радиолокатором или лидаром 104, датчики 106 приближения или касания и/или ультразвуковые датчики 108. Кроме того, автономное транспортное средство 101 может также включать в себя ресурсы 107 обнаружения местоположения для определения (периодически) текущего местоположения автономного транспортного средства 101. В качестве примера механизм (механизмы) 107 обнаружения местоположения, имеющийся на автономном транспортном средстве 101, может включать в себя беспроводные приёмопередатчики и/или обработку беспроводного сигнала, ресурсы системы глобального позиционирования (GPS) или другие приёмники спутникового позиционирования. В некоторых вариантах интерфейс 105 датчиков может включать в себя программы для осуществления обработки сигналов или датчиков с целью получения информации о местоположении, например, посредством визуальной одометрии, распознавания ориентиров и/или обработки и отображения движения датчика.
[0039] Интерфейс 105 датчиков получает исходные данные 99 датчиков от различных датчиков 102, 104, 106, 108. Исходные данные 99 датчиков могут в совокупности представлять некоторый выходной сигнал или сообщение от множества датчиков, которые обеспечивает САТС 100. Интерфейс 105 датчиков может обработать исходные данные 99 датчиков, чтобы сформировать набор 95 профиля датчика. На наборе 95 профиля датчика может быть проведён один или несколько процессов компонента 110 анализа датчиков. Процессы компонента 110 анализа датчиков действуют, создавая данные 111 датчиков, которые могут быть далее обработаны как, например, параметрический или командный вход для других компонентов САТС 100. Данные 111 датчиков могут быть переданы на контроллер 144 для управления различными интерфейсами автономного транспортного средства 101.
[0040] Более подробно: подсистема 130 интерфейса транспортного средства может включать в себя несколько интерфейсов транспортного средства или управлять ими, в т.ч. интерфейс 132 ускорения, интерфейс 134 рулевого управления, интерфейс 136 торможения, интерфейс 138 световых приборов и/или вспомогательного оборудования и/или другие интерфейсы для работы транспортного средства. Контроллер 144 может одновременно передавать сигналы 149 управления транспортным средством на несколько интерфейсов транспортного средства, чтобы управлять тягой, рулевой системой, торможением и другим оборудованием автономного транспортного средства 101 при его следовании по маршруту. Таким образом, в то время как автономное транспортное средство 101 следует по маршруту, контроллер 144 может непрерывно регулировать и изменять его движение в ответ на приём данных 111 от датчиков. При отсутствии событий или состояний, которые воздействуют на степень надёжности транспортного средства безопасно продвигаться по маршруту, контроллер 144 может обрабатывать информацию 111 от датчиков, чтобы вырабатывать различные сигналы 149 управления транспортным средством для различных интерфейсов подсистемы 130 интерфейса транспортного средства.
[0041] Автономное транспортное средство 101 может быть использовано с различными удалёнными сервисами 50, которые также используют или включают в себя человеческие ресурсы. Например, автономное транспортное средство 101 может быть использовано как часть парка транспортных средств, обеспечивающих транспортные услуги. В таком контексте удалённые сервисы 50 могут включать в себя сервис 10 предоставления транспортировки, который предоставляет транспортировку по запросам пользователей или клиентов. Когда автономное транспортное средство 101 работает на обеспечение транспортировки, то сервис 10 предоставления транспортировки может принять информацию 133 о местоположении от автономного транспортного средства 101 (например, с помощью GPS-приёмника) и далее сообщить информацию 141 о маршруте в САТС 100. Информация 141 о маршруте может быть принята САТС 100 через сервисный интерфейс 140. Контроллер 144 может обрабатывать информацию 141 о маршруте, чтобы управлять интерфейсной системой 130 транспортного средства через рулевую систему или иным образом, перемещая транспортное средство в соответствии с маршрутом, указанным в информации 141 о маршруте. Таким образом, автономное транспортное средство 101 может совершить поездку, чтобы выполнить запрос на транспортировку, сделанный через сервис 10 предоставления транспортировки. Например, автономное транспортное средство 101 может совершить поездку, например, от места загрузки или оказания услуги к месту выгрузки или оказания другой услуги с использованием информации 141 о маршруте, предоставленной сервисом 10 предоставления транспортировки. Более подробный пример сервиса 10 предоставления транспортировки представлен на фиг. 3.
[0042] Программа 120 определения события может действовать, выявляя события или состояния, которые понижают степень надёжности применительно к интерпретации ситуации транспортным средством. В одной из реализаций программа 120 определения события может вырабатывать некоторое значение степени надёжности для отдельных событий или состояний, обнаруживаемых при обработке информации 111, получаемой от датчиков. Это значение уровня надёжности может быть индикацией того, насколько безопасно и надёжно САТС 100 может обработать рассматриваемое событие или состояние. Например, если событием является начавшийся дождь или обнаружение большой выбоины на дороге, то значение уровня надёжности, выданное программой 120 определения события, может быть относительно высоким, означая, что САТС 100 имеет хорошее понимание того, что представляет собой данное событие или состояние и как реагировать на него (например, игнорировать это событие, сменить полосу движения, если это возможно, и т.д.). Программа 120 определения события может показать, что какое-то событие или состояние даёт значение уровня надёжности ниже некоторого порогового значения. Этот порог может быть выбран в ходе ввода в эксплуатацию или при разработке системы, чтобы задать значение, при котором можно считать, что интерпретация со стороны САТС 100 события или состояния и/или, соответственно, действия, которое должно быть предпринято автономным транспортным средством 101, является недостаточной.
[0043] Программа 120 определения события может выдать запрос 121 о событии в ответ на определение того, что некоторое событие или состояние (в том числе, как транспортное средство должно реагировать на это событие или состояние) недостаточно понято. Дополнительно программа 120 определения события может выдать запрос 121 о событии, если эта программа 120 определит, что запланированное или вероятное действие для некоторого события или состояния имеет относительно низкую степень надёжности. Например, автономное транспортное средство может спланировать перемещение влево для обеспечения безопасности, но информация 111 от датчиков может означать нахождение там рыхлой грязи на открытом пространстве, давая неопределённость относительно того, является ли запланированный или вероятный манёвр безопасным.
[0044] САТС 100 может передать запрос 121 о событии одному или нескольким удалённым сервисам 50, таким как (i) сервис 20 поддержки в управлении со стороны транспортного средства, управляемого человеком, или (ii) удалённый сервис 30 поддержки со стороны человека-оператора. Сервис 20 поддержки в управлении со стороны транспортного средства, управляемого человеком, или удалённый сервис 30 поддержки со стороны человека-оператора может обеспечить различные формы помощи со стороны человека из общего фонда 92 человеческих ресурсов, чтобы облегчить автономному транспортному средству 101 интерпретацию события или состояния.
[0045] В соответствии с одной реализацией запрос 121 о событии может быть передан в сервис 20 поддержки направления со стороны транспортного средства, управляемого человеком, который, в свою очередь, может инициировать интерфейс 90 человека-оператора, чтобы выбрать транспортное средство, управляемое человеком. Интерфейс 90 человека-оператора может, например, соответствовать системе диспетчеризации для транспортной услуги, использующей транспортные средства, управляемые человеком. Примеры предусматривают, что транспортные средства, управляемые человеком, являются предпочтительными по многим причинам, в том числе потому, что известны как поставщики транспорта, так и маршрут, текущее и/или будущее местоположение таких транспортных средств. Например, интерфейс 90 человека-оператора может работать как часть транспортной услуги, которая отправляет транспортные средства, управляемые человеком, в места оказания услуги, например, чтобы забрать пассажиров и грузы и перевезти пассажиров или грузы в места выгрузки или оказания услуги. Таким образом, маршрут транспортного средства, управляемого человеком, может быть известен в данный момент времени.
[0046] Как описано в примере на фиг. 2, сервис 20 поддержки направления со стороны транспортного средства, управляемого человеком, может использовать интерфейс 90 человека-оператора, чтобы идентифицировать людей-операторов, которые управляют транспортными средствами в ходе активных поездок, для выполнения запросов на транспортировку, а также людей-операторов, которые доступны для текущих запросов на транспортировку. Как описано в примере на фиг. 2, сервис 20 поддержки направления со стороны транспортного средства, управляемого человеком, может связать транспортное средство, управляемое человеком, с автономным транспортным средством 101, когда, например, программа 120 определения события выявляет относительно низкую степень надёжности (например, значение степени надёжности ниже приемлемого порога) того, как безопасно обработать некоторое событие или состояние. Когда такое связывание выполнено, автономное транспортное средство 101 может принимать информацию 141 о маршруте и/или команды 151 для (i) соответствия транспортному средству, управляемому человеком, которое должно служить в качестве ведущего, и (ii) отслеживания транспортного средства, управляемого человеком, на участке дороги, который является проблематичным для автономного транспортного средства 101. Информация 141 о маршруте и/или команды 151 могут быть использованы контроллером 144 как вход 147 управления маршрутом и/или вход 149 управления транспортным средством. Например, подсистема 130 интерфейса транспортного средства может создать вход 147 управления маршрутом и/или вход 149 управления транспортным средством для ускорения, поворота колёс и торможения транспортного средства (например, для соответствия транспортному средству, управляемому человеком, и для следования за таким транспортным средством). Таким образом, САТС 100 может принимать информацию 141 о маршруте и/или команды 151 и действовать, выдавая соответствующие управляющие сигналы для подсистемы 130 интерфейса транспортного средства, чтобы заставить автономное транспортное средство 101 отслеживать транспортное средство, управляемое человеком, которое выбрано сервисом 20 поддержки направления со стороны транспортного средства, управляемого человеком, в качестве ведущего.
[0047] Как дополнение или альтернатива сервис 20 поддержки направления со стороны транспортного средства, управляемого человеком, может получать информацию о маршруте от сервиса 10 предоставления транспортировки о том, что автономное транспортное средство 101 должно взять. Основываясь на информации о трудностях определённых участков маршрута, сервис 20 поддержки направления со стороны транспортного средства, управляемого человеком, может связать транспортное средство, управляемое человеком, с автономным транспортным средством 101. Используя данные о местоположении, полученные от транспортных средств, сервис 20 поддержки направления со стороны транспортного средства, управляемого человеком, может определить, какое транспортное средство, управляемое человеком, будет перемещаться по тем же самым трудным участкам маршрута, благодаря чему транспортное средство, управляемое человеком, может быть использовано в качестве ведущего для автономного транспортного средства 101 и предоставлять информацию 141 о маршруте и/или команды 151 этому автономному транспортному средству.
[0048] В вариантах запрос 121 о событии может быть передан в удалённый сервис 30 поддержки со стороны человека-оператора. Удалённый сервис 30 поддержки со стороны человека-оператора связывается с одним или несколькими удалёнными людьми-операторами, облегчающими дистанционное направление для автономного транспортного средства 101, выдавая этому транспортному средству 101 команды в режиме реального времени для обработки событий или состояний, которые, как предполагается, относятся к безопасности (например, те события, для которых программа 120 определения события выявляет значение степени надёжности, относящееся к безопасности, ниже порогового). Как альтернатива или дополнение дистанционное направление может выдавать команды в режиме реального времени автономному транспортному средству 101, чтобы облегчить этому средству 101 выполнение оптимальных или надлежащих действий, таких как (i) идентификация места для выгрузки пассажира, (ii) полоса движения, которую следует занять для оптимизации времени поездки (или оптимизации безопасности, комфорта и т.д.), или (iii) действие, результат которого неизвестен автономному транспортному средству, например, приближение к электронным воротам, которые будут открыты автоматически, как только транспортное средство окажется в непосредственной близости от них.
[0049] В описанных примерах удалённый сервис 30 поддержки со стороны человека-оператора может быть предоставлен для событий или состояний, которые требуют немедленного ввода от удалённого человека-оператора. Как показано в примере на фиг. 4, удалённый человек-оператор может выполнить ввод, принимаемый САТС 100 как команды. Ввод, выполненный удалённым человеком-оператором, может быть получен как информация 141 о маршруте или как команды 151. Контроллер 144 может использовать этот ввод для управления подсистемой 130 интерфейса транспортного средства и её различными интерфейсами, чтобы обработать событие или состояние с минимальным прерыванием.
[0050] Как показано в примере на фиг. 4, примеры предусматривают, что автономные транспортные средства могут быть неудобными для пассажиров, поскольку они тормозят и останавливаются значительно чаще, чем транспортные средства, управляемые людьми. Автономные транспортные средства, в общем случае, используют секунды, например, для обработки и оценки дорожного состояния или события. В соответствии с примерами внедрение и использование удалённого сервиса 30 поддержки со стороны человека-оператора даёт решение, направленное на неотъемлемое свойство автономных транспортных средств - осторожный и неудобный для пассажиров характер движения (частое торможение, медленное продвижение), тогда как происходящие события и встречающиеся состояния, в общем, знакомы. Удалённый сервис 30 поддержки со стороны человека-оператора облегчает автономному транспортному средству 101 продвижение благодаря уменьшению потребности у этого средства в торможении, замедлении или остановке при возникновении каких-то событий или состояний.
СИСТЕМА ПОДДЕРЖКИ НАПРАВЛЕНИЯ СО СТОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА, УПРАВЛЯЕМОГО ЧЕЛОВЕКОМ
[0051] ФИГ. 2 показывает пример системы для реализации транспортного средства, управляемого человеком и осуществляющего поддержку направления для автономного транспортного средства. Система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может реализовать соответствующий сервис, такой как описанный сервис 20 поддержки направления со стороны ТСУЧ (транспортного средства, управляемого человеком), фиг. 1. В примере на фиг. 2 система 200 поддержки направления со стороны транспортного средства, управляемого человеком, включает в себя интерфейс автономного транспортного средства ("ATC-интерфейс 204" (ATC - автономное транспортное средство")), анализ 208 события, компонент 210 анализа маршрута, компонент выбора транспортного средства, управляемого человеком, ("Компонент 220 выбора ТСУЧ " (ТСУЧ - транспортное средство, управляемое человеком)), компонент определения команды выбора транспортного средства, управляемого человеком, ("Компонент 230 определения команды выбора ТСУЧ"), интерфейс транспортного средства, управляемого человеком, ("ТСУЧ-интерфейс 240") и трекер транспортного средства, управляемого человеком, ("ТСУЧ-трекер 244"). ATC-интерфейс 204 обменивается данными с САТС 100 автономного транспортного средства 101, как показано в примере на фиг. 1. АТС-интерфейс 204 принимает запрос 121 о событии, показывающий, что САТС 100 обнаружила событие или состояние, как обращаться с которым САТС 100 не знает (с достаточной надёжностью). Запрос 121 о событии может содержать данные об автономном транспортном средстве ("ATC-данные 201"), которые включают в себя различные типы данных, полученных от САТС 100. В частности, ATC-данные 201 могут включать в себя текущее местоположение автономного транспортного средства 101 ("ATC ТМ 203"), запланированное место выгрузки или оказания услуги (например, пункт остановки) автономного транспортного средства ("ATC Выгр. 205"), запланированный маршрут для автономного транспортного средства 101 ("Информация 207 о маршруте"), а также различные виды информации от датчиков (собирательно "Информация 209 от датчиков"). Картографический сервис 199 может быть встроен в различные компоненты системы 200 или обеспечен в них иным образом. Например, картографический сервис 199 может быть встроен или иначе введён в компонент 208 анализа события, компонент 210 анализа маршрута, компонент 220 выбора ТСУЧ, компонент 230 определения команды ТСУЧ и/или в ТСУЧ-трекер 244.
[0052] Компонент 208 анализа события может работать, чтобы выдать интерпретацию события или состояния, которое вызвало запрос 121 о событии. Так, например, анализ 208 события может обрабатывать информацию 209 датчиков в контексте информации о местоположении автономного транспортного средства 101. Анализ 208 события может опираться на информацию о местоположении автономного транспортного средства 101 в противоположность картографическому сервису 199, чтобы определить контекст запроса 121 о событии. В некоторых примерах источник 217 специфической для региона информации может записывать информацию о регионе, привязанную к местоположению, а комбинация информации 209 от датчиков и информации о местоположении автономного транспортного средства 101 (например, как это обеспечивает ATC ТМ 203) может быть внесена в контекстную информацию о событии ("информация 215 - контекстуальная или событийная"). Например, контекстная информация 215 может включать в себя метки или дескрипторы или числовые эквиваленты или взаимосвязи параметров, которые указывают на одно или несколько из следующих явлений: строительство дорог, движение пешеходов, аварийная ситуация, чрезвычайный трафик и т.д.
[0053] Компонент 210 анализа маршрута может работать, чтобы определить, как автономное транспортное средство 101 должно действовать до того, как будет обеспечено ведущее транспортное средство, управляемое человеком, которое может быть предоставлено этому автономному транспортному средству 101. Например, компонент 210 анализа маршрута может определить, что автономное транспортное средство 101 должно оставаться на текущем месте (ATC ТМ 203) или - альтернативно - найти первую попавшуюся уличную парковкуА или другое место, где это автономное транспортное средство 101 может ждать прибытия ведущего транспортного средства, управляемого человеком. Примеры предусматривают, однако, что в городских условиях, особенно когда, вероятно, будут вырабатываться запросы 121 о событии, возможность автономного транспортного средства 101 оставаться на курсе или в его текущем местоположении в ожидании помощи не всегда возможна или оправдана. Компонент 210 анализа маршрута может включать в себя компонент 212 отклонения маршрута (или поддержки), который задаёт такое место встречи ("MB 213"), где автономное транспортное средство 101 может безопасно ждать, а затем следовать за ведущим транспортным средством, управляемым человеком, или иным образом отслеживать его. Компонент 212 отклонения маршрута может включать в себя программу, которая запрашивает у картографического сервиса 199 информацию о парковке, находящейся в непосредственной близости от текущего местоположения автономного транспортного средства (ATC ТМ 203). Компонент 210 анализа маршрута может определить маршрут от ATC ТМ 203 до места 213 встречи.
[0054] В некоторых вариантах компонент 210 анализа маршрута и/или компонент 212 отклонения маршрута могут также использовать контекстную информацию 215, чтобы определить подходящее или оптимальное место 213 встречи. Например, контекстная информация 215 может показать, может ли текущее местоположение автономного транспортного средства 101 быть местом 213 встречи. Альтернативно контекстная информация 215 может дать расстояние до места встречи или направление движения к нему для автономного транспортного средства 101. Например, контекстная информация 215 может показать, что имеется событие - большое количество пешеходов (например, закончился бейсбольный матч); это событие повлияет на доступность парковки на целой квадратной миле.
[0055] Компонент 210 анализа маршрута может обмениваться данными о месте 213 встречи с компонентом 220 выбора транспортного средства, управляемого человеком. Компонент 220 выбора транспортного средства, управляемого человеком, может работать, чтобы выбрать транспортное средство, управляемое человеком, в качестве ведущего для автономного транспортного средства 101. Процесс, с помощью которого компонент 220 выбора транспортного средства, управляемого человеком, выбирает такое устройство, чтобы вести автономное транспортное средство 101, может различаться в зависимости от реализации и разработки. Компонент 220 выбора транспортного средства, управляемого человеком, может запросить одно или несколько хранилищ данных, содержащих информацию о потенциальных транспортных средствах, управляемых людьми, которые также могут послужить в качестве ведущих для автономного транспортного средства 101. В частности, компонент 220 выбора транспортного средства, управляемого человеком, может запросить хранилище 232 данных об активных поездках, которое регистрирует транспортные средства, управляемые человеком, на активных транспортных маршрутах, для выполнения запросов на транспортировку. Соответственно, хранилище 232 данных об активных поездках может включать в себя текущее местоположение потенциальных транспортных средств, управляемых человеком, а также маршрут, который такие транспортные средства используют (например, в настоящий момент двигаются или только планируют двинуться). Как дополнение или альтернатива компонент 220 выбора транспортного средства, управляемого человеком, может также получить доступ к открытому хранилищу 234 данных водителей, идентифицирующее управляемые людьми транспортные средства, которые доступны для нового запроса на транспортировку, но которые при этом в данный момент времени не относятся ни к категории активной поездки, ни к категории выполнения запроса на транспортировку. Как альтернатива или вариант компонент 220 выбора ТСУЧ может запросить транспортную библиотеку 236, идентифицирующую транспортные средства, для которых текущее местоположение известно или предполагается и для которых известен текущий маршрут. Например, транспортная библиотека 236 может идентифицировать городские автобусы.
[0056] Компонент 220 выбора ТСУЧ может создать критерии 227 ТСУЧ для выбора из одного или нескольких хранилищ 232 данных об активных поездках, из открытого хранилища 234 данных водителей 234 или из транспортной библиотеки 236. Критерии 227 ТСУЧ могут включать в себя данные, которые могут быть использованы для выбора транспортного средства, управляемого человеком, чтобы вести автономное транспортное средство 101.
[0057] Критерии 227 ТСУЧ могут быть основаны главным образом или частично на месте 213 встречи. Так, например, автономному транспортному средству 101 может быть дано указание двигаться к месту 213 встречи, которое может быть выбрано на основе близости к текущему местоположению автономного транспортного средства 101. Место 213 встречи может стать основой для идентификации транспортного средства, управляемого человеком, предназначенного для ведения автономного транспортного средства 101. В вариантах критерии 227 ТСУЧ включают в себя или заменяют текущее местоположение автономного транспортного средства 101 и/или другие факторы, такие как участок маршрута, для прохождения которого автономному транспортному средству 101 требуется помощь.
[0058] Компонент 220 выбора ТСУЧ может получить набор 231 кандидатов из транспортных средств, управляемых человеком, ("набор 231 кандидатов (из транспортных средств, управляемых человеком)"), удовлетворяющих критериям 227 ТСУЧ (например, транспортные средства, управляемые человеком, находящиеся не далее соответствующего расстояния от места 213 встречи). Набор 231 кандидатов из транспортных средств, управляемых человеком, может представлять собой предварительный набор результатов, из которого должен быть сделан окончательный выбор. Каждое транспортное средство из набора 231 кандидатов может быть связано с одним или несколькими текущими местоположениями 233 транспортного средства, управляемого человеком, местом 235 разгрузки транспортного средства, управляемого человеком, или маршрутом 237 транспортного средства, управляемого человеком.
[0059] В одном аспекте компонент 220 выбора ТСУЧ включает в себя компонент 222 определения отклонения маршрута транспортного средства, управляемого человеком, (также "компонент 222 ТСУЧ ООМ"), программу 224 расчёта времени и правила 226 выбора. Для каждого транспортного средства, идентифицированного набором 231 кандидатов из транспортных средств, управляемых человеком, компонент 222 определения отклонения маршрута определяет один или несколько маршрутов к месту 213 встречи (i) из текущего местоположения 233 транспортного средства, управляемого человеком, (например, изменение маршрута транспортного средства, когда выполняется поездка с активным заказом), (ii) из места 235 разгрузки транспортного средства, управляемого человеком, (например, транспортное средство, управляемое человеком, двигается к месту 213 встречи после завершения активного заказа) и/или (iii) определяет маршрут 237 транспортного средства, управляемого человеком, (например, изменение маршрута транспортного средства, когда выполняется поездка с активным заказом). Программа 224 расчёта времени может рассчитать примерное время прибытия ("PB") для каждого транспортного средства, управляемого человеком, из набора 231 кандидатов на основании определённых маршрутов для данного транспортного средства. Программа 224 расчёта времени может рассчитать для каждого транспортного средства из набора 231 кандидатов его примерное время прибытия (i) на место 213 встречи, где его ожидает автономное транспортное средство 101, и/или (ii) на запланированное место разгрузки 235 транспортного средства, управляемого человеком, для того транспортного средства, которое находится в активной поездке. В последнем случае программа 224 расчёта времени может определить, сколько времени должно быть добавлено к активной поездке, если данное транспортное средство выбрать для ведения автономного транспортного средства 101. В некоторых вариантах программа 224 расчёта времени может также рассчитать время для выбранного транспортного средства из набора 231 рассматриваемых транспортных средств, управляемых человеком, для направления автономного транспортного средства 101 от места 213 встречи по участку дороги, где имеет место быть соответствующее событие или состояние.
[0060] Правила 226 выбора могут реализовать программу принятия решения на основе правил для выбора одного средства из набора 231 рассматриваемых транспортных средств, управляемых человеком, как ведущего для данного автономного транспортного средства 101. Например, правила могут выбрать ведущее транспортное средство из набора 231 кандидатов на основе критериев или весовых коэффициентов, которые включают в себя следующее: (i) минимизация для выбранного транспортного средства, управляемого человеком, времени или расстояния, требуемого для прибытия на место 213 встречи, (ii) минимизация для выбранного транспортного средства, управляемого человеком, дополнительного времени, требуемого для отклонения к месту 213 встречи во время активной поездки, затем направления автономного транспортного средства 101 и завершения активного заказа, (iii) минимизация для транспортного средства, управляемого человеком, абсолютного времени, требуемого для прибытия на место 213 встречи и направление автономного транспортного средства 101 по соответствующему участку дороги, и/или (iv) минимизация времени от момента, когда выбранное транспортное средство завершит направление автономного транспортного средства 101 по соответствующему участку дороги и прибудет в следующее место оказания услуги (например, место загрузки для запроса на транспортировку, выбранное для транспортного средства, управляемого человеком, действующего как ведущее). Правила 226 выбора могут использовать также другие типы выбора, например, когда предпочтение какому-либо транспортному средству, управляемому человеком, отдаётся в зависимости от типа этого средства, информации профиля или информации о конкретном водителе (например, выбор водителя для оказания помощи автономному транспортному средству по очереди или выбор водителя, у которого есть опыт такого направления).
[0061] Как дополнение или альтернатива, правило 226 выбора может выбрать транспортное средство, управляемое человеком, на основе определения типа ресурсов, которые присущи транспортным средствам из набора 231 кандидатов, или учесть это при выборе. В одном аспекте транспортное средство, управляемое человеком, является более предпочтительным при выборе в качестве ведущего, поскольку оно имеет встроенные датчики для получения информации об участке дороги, рассматриваемом применительно к автономному транспортному средству 101. Например, выбранное транспортное средство, управляемое человеком, может иметь механическое дополнение с комплектом камеры, предназначенным для получения изображения участка дороги, благодаря чему удалённый сервис может обрабатывать и интерпретировать эту информацию для других автономных транспортных средств.
[0062] Компонент 220 выбора ТСУЧ использует функциональные возможности и логику, например, как описано с компонентом 222 определения отклонения маршрута транспортного средства, управляемого человеком, программой 224 расчёта времени и правилами 226 выбора, чтобы выбрать транспортное средство, управляемое человеком, из набора 231 кандидатов. Когда компонент 220 выбора ТСУЧ выбирает транспортное средство, управляемое человеком, из набора 231 кандидатов, то идентификатор выбранного транспортного средства, управляемого человеком, ("ТСУЧ идентификатор 255") может быть доведён до автономного транспортного средства 101 через ATC-интерфейс 204. Компонент 230 определения команды ТСУЧ может также генерировать набор 257 команд для ТСУЧ-идентификатора 255. Компонент 230 определения команды ТСУЧ может использовать, например, картографический сервис 199, который привязан к текущему местоположению 233 транспортного средства, управляемого человеком, чтобы определить маршрут для выбранного транспортного средства к месту 213 встречи ("MB маршрут 265"), ориентировочное или максимальное время, которое транспортное средство, управляемое человеком, должно ждать на месте 213 встречи прибытия автономного транспортного средства 101 (если транспортное средство, управляемое человеком, прибыло на место встречи первым) ("время ожидания 267" или "ВОжид. 267"), а также одно или несколько уведомлений ("уведомления 269"), информирующие водителя выбранного транспортного средства о том, что автономное транспортное средство 101 следует / будет следовать за транспортным средством, управляемым человеком. Набор 257 команд может быть передан в систему 500 транспортного средства, управляемого человеком, (например, см. рис. 5), чтобы предоставить информацию человеку-водителю и побудить его или иным образом направить на выполнение ручных действий, соответствующих работе транспортного средства по направлению автономного транспортного средства 101.
[0063] В некоторых вариантах ТСУЧ-трекер 244 получает местоположение ведущего транспортного средства ("Местоположение ТСУЧ 245"), когда оно начинает двигаться в направлении автономного транспортного средства 101 (или к месту 213 встречи). ТСУЧ-трекер 244 может использовать местоположение ТСУЧ 245 (полученное от механизма обнаружения местоположения 560 системы 500 транспортного средства, управляемого человеком), чтобы предоставить обновлённую информацию о местоположении автономному транспортному средству 101 о прибытии выбранного ведущего транспортного средства. Как дополнение или вариант расчётное время прибытия ведущего транспортного средства на место встречи ("ТСУЧ MB PB 247") может быть также доведено до автономного транспортного средства 101 через ATC-интерфейс 204. Более того, в некоторых вариантах ТСУЧ-трекер 244 может выдавать предупреждение автономному транспортному средству 101, когда становится ясно, что прибытие ведущего транспортного средства к месту 213 встречи произойдёт в самое ближайшее время. Автономное транспортное средство 101 может также проинформировать ведущее транспортное средство о своём собственном местоположении ("ATC-местоположение 259") прямо или косвенно.
[0064] После встречи автономного транспортного средства 101 и выбранного ведущего транспортного средства 101 первое может начать отслеживать второе на соответствующем участке дороги. В некоторых вариантах транспортное средство, управляемое человеком, может иметь маркеры, воспринимаемые датчиками, которые позволяют автономному транспортному средству 101 идентифицировать такое транспортное средство и затем следовать за ним или отслеживать его при движении по выбранной дороге. Например, автономное транспортное средство 101 может иметь камеры, которые наводятся на визуальный маркер ведущего транспортного средства. Более того, камеры или другие датчики могут отслеживать ведущее транспортное средство на основе маркеров, которые присущи данному транспортному средству, например, номерной знак ведущего транспортного средства, или на основе других заведомо заметных визуальных характеристик транспортного средства. В некоторых вариантах сетевой сервис (например, "Сервис 20 поддержки в управлении со стороны ТСУЧ") отслеживает ведущее транспортное средство и сообщает о его местоположении автономному транспортному средству 101 с целью содействия отслеживанию ведущего транспортного средства и/или разрешения такого отслеживания на соответствующем участке дороги.
[0065] Более того, транспортное средство, управляемое человеком, может включать в себя датчики местоположения и приборы для определения своего собственного местоположения на дороге, в том числе для получения информации о местоположении, которая идентифицирует, на какой полосе или стороне дороги находится данное транспортное средство. Информация о местоположении может быть передана на автономное транспортное средство 101, которое тогда пытается найти транспортное средство, управляемое человеком, и следовать за ним или отслеживать его. Передача информации о местоположении от транспортного средства, управляемого человеком, на автономное транспортное средство 101 может быть прямой или через удалённый сервис. Кроме того, в некоторых вариантах транспортное средство, управляемое человеком, может включать в себя компоненты для поиска автономного транспортного средства 101 по прибытии на место 213 встречи. Таким образом, за прибытием выбранного транспортного средства, управляемого человеком, на место 213 встречи может быть выполнена процедура подтверждения установления связи, в ходе которой два транспортных средства обмениваются идентификаторами и информацией о местоположении, прежде чем автономное транспортное средство 101 переключается в режим автоматического сопровождения и начинает отслеживание.
[0066] В некоторых реализациях процесс, посредством которого автономное транспортное средство 101 переключается в режим автоматического сопровождения транспортного средства, управляемого человеком, является автоматическим и требует от транспортного средства, управляемого человеком, чтобы оно просто подъехало к месту 213 встречи и/или проехало через него. В вариантах процесс, посредством которого автономное транспортное средство 101 переключается в режим автоматического сопровождения, может включать в себя ручной ввод или ручные действия. Например, водителю транспортного средства, управляемого человеком, возможно, потребуется остановиться или подъехать непосредственно к автономному транспортному средству 101 или помощи интерфейсной системы 500 транспортного средства, управляемого человеком, отправить сообщения или идентификационные сигналы, которые обеспечат переключение автономного транспортного средства 101 в режим автоматического сопровождения.
СИСТЕМА ПРЕДОСТАВЛЕНИЯ ТРАНСПОРТИРОВКИ С ВЫБОРОМ ATC
[0067] ФИГ. 3 показывает пример системы 300 предоставления транспортировки, которая целесообразно выбирает, предоставлять для выполнения запроса на транспортировку транспортное средство, управляемое человеком, или автономное транспортное средство. Система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может реализовать соответствующий сервис, такой как описанный сервис 10 предоставления транспортировки, фиг. 1. На фиг. 3 система 300 предоставления транспортировки включает в себя компонент 310 определения предпочтения, программу 320 принятия решения ATC/ТСУЧ, базу 330 сравнения маршрутизации и прогностические компоненты маршрутизации для автономных транспортных средств ("ATC-маршрутизация 340") и для транспортных средств, управляемых человеком, ("ТСУЧ-маршрутизация 342"). Система 300 может также включать в себя пользовательский интерфейс 302, который может работать как интерфейс для клиентов, чтобы запрашивать транспортные услуги.
[0068] Наряду с другими преимуществами и техническими достоинствами реализация фиг. 3 предусматривает, что автономные транспортные средства не всегда будут в состоянии достичь желаемого места или пройти наиболее эффективный маршрут из-за ограничений в способности таких транспортных средств адекватно оценить окружающие среду и условия. Например, если место загрузки находится в закрытом жилом комплексе, то система 300 может определить, что человек-водитель сможет осуществить требуемые действия, чтобы прибыть к двери дома клиента, в то время как автономному транспортному средству, вероятно, потребуется встретить клиента у ворот. Аналогично, как описано в других примерах (см. фиг. 2), городские условия являются динамичными с точки зрения препятствий и состояний, влияющих на способность автономного транспортного средства адекватно оценивать эти условия и ориентироваться в них, и соответствующие события могут быть преходящими, продолжаясь от нескольких минут до нескольких суток. Система 300 предусматривает, что при реализации, например, транспортных услуг "по запросу", автономному транспортному средству могут потребоваться отклонения от мест оказания услуги и/или от маршрутов. Дополнительно, как показано в примере на фиг. 2, система 300 предусматривает, что автономное транспортное средство может потребовать дополнительных ресурсов для завершения поездки из-за событий или состояний на дороге. Более того, пример на фиг. 3 предусматривает, что на то, какой тип транспортного средства больше подойдёт для конкретного запроса на транспортировку, могут повлиять такие ограничения автономных транспортных средств, как, например, какой тип транспортного средства, в конечном счёте, предпочитает пользователь или клиент.
[0069] Клиенты могут работать, например, с приложением на мобильных устройствах. При запуске это приложение может автоматически связать мобильное компьютерное устройство клиента с системой 300 предоставления транспортировки. При подсоединении клиента приложение может сгенерировать запрос 301 на транспортировку ("ЗНТ 301") в ответ на пользовательский ввод. Запрос 301 на транспортировку может передать следующую информацию: (i) идентификатор клиента и/или учётную запись клиента ("идентификатор 311 клиента") и (ii) одно или несколько мест оказания услуги для запроса 301 на транспортировку, такие как место 313 загрузки и/или место 315 разгрузки. Дополнительно запрос 301 на транспортировку может включать в себя интерфейс, в котором клиент может указать дополнительные запросы или параметры ("специальный запрос 317"). Специальный запрос 317 может варьироваться в зависимости от реализации и разработки, как, например, входная или другая индикации (например, предположение о местонахождении клиента), что пользователь имеет продовольственные товары или большое количество позиций для переноски. Дополнительно специальный запрос 317 может опционально указать предпочтения пользователя для типа транспортного средства и, в частности, предпочитает ли пользователь автономное транспортное средство или транспортное средство, управляемое человеком.
[0070] На фиг. 3 можно видеть, что пользовательский интерфейс 302 может связать клиентский запрос на транспортировку 301 с компонентом 310 определения предпочтения. Компонент 310 определения предпочтения может использовать идентификатор 311 клиента, чтобы получить профиль 314 клиента. Дополнительно в некоторых вариантах профиль 314 клиента может включать в себя данные, которые показывают частично или полностью следующую информацию: (i) задание со стороны пользователя или его предварительно сохранённое предпочтение - получить автономное транспортное средство или транспортное средство, управляемое человеком; (ii) последние виды транспортных средств, которые предоставляли транспортные услуги для данного транспортного средства, как, например, сколько раз пользователь получил или специально просил автономное транспортное средство; (iii) оценочная информация, представленная пользователем за последний транспорт, в т.ч. оценка или обратная связь, выданная клиентом за автономное транспортное средство; (iv) данные, показывающие предпочтение пользователя для транспортных факторов, которые могут быть затронуты, если для обеспечения транспортировки используется автономное транспортное средство, в т.ч. данные, показывающие, является ли для клиента приемлемым (а) заплатить премию за транспортное средство определённого типа (например, если спрос на некоторое транспортное средство превышает спрос на другое или если некоторый тип транспортного средства является более дорогим, чем другие) и/или (б) изменение места оказания услуги (например, когда автономное транспортное средство не может безопасно доехать до места разгрузки).
[0071] В некоторых вариантах компонент 310 определения предпочтения может также получить доступ к библиотеке известных в настоящее время мест, которые, вероятно, могут создать проблемы для автономного транспортного средства 101 ("библиотека 318 правил"). Библиотека 318 правил может обеспечить правило 327 выбора и/или весовой коэффициент 329 для выбора или воздействия на выбор какого-то типа транспортного средства. Правило выбора и/или весовой коэффициент 329 могут базироваться на параметрах местоположения (например, место 313 загрузки и место 315 разгрузки), на специальных запросах 317 на транспортировку и/или на параметрах времени (например, время суток). Библиотека 318 правил может, таким образом, обеспечить правила выбора, которые могут коррелировать с параметрами, включёнными в запрос 301 на транспортировку. Например, одно или несколько мест оказания услуги могут быть недоступными или труднодоступными для автономного транспортного средства. С другой стороны, любой специальный запрос 317 клиента может исключить некоторый тип транспортного средства или выступить за него. Например, если у клиента есть продовольственные товары, то автономное транспортное средство может быть исключено из-за недостатка внутреннего пространства.
[0072] Компонент 310 определения предпочтения может выдать параметр 335 выбора для программы 320 принятия решения ATC/ТСУЧ. Параметр 335 выбора предпочтения может учитывать предпочтение клиента, а также параметры запроса 301 на транспортировку. Параметр 335 выбора может также учитывать правило 327 выбора и весовой коэффициент 329 по их весовому коэффициенту или иному определению.
[0073] Согласно некоторым примерам пользовательский интерфейс 302 также может передавать места оказания услуги (например, места 313 загрузки и/или места 315 разгрузки) в базу 330 сравнения маршрутизации. База 330 сравнения маршрутизации может выполнять прогноз маршрута для запроса 301 на транспортировку, учитывая оптимизационные параметры и прогнозы, отклонится ли автономное транспортное средство 101 от оптимального маршрута или потребуется ли изменение мест загрузки или разгрузки 313, 315. Как показано в примере на фиг. 1 или фиг. 2, варианты осуществления изобретения предусматривают, что автономные транспортные средства в городских условиях по своей природе нуждаются в помощи из-за присущей таким транспортным средствам невозможности достичь такого уровня интерпретации сигналов от датчиков, который можно было бы считать безопасным.
[0074] Более конкретно, база 330 сравнения маршрутизации может реализовать процесс 340 маршрутизации ATC, который обрабатывает оптимальный и возможные маршруты между местом 313 загрузки и местом 315 разгрузки. Прогностическое определение маршрута, осуществляемое в процессе 340 маршрутизации ATC, может использовать, например, информацию в реальном времени о трафике и специфическую для региона информацию, например, предоставляемую картографическим сервисом 199 (см. фиг. 2) или источником 217 специфической для региона информации (см. фиг. 2). Процесс 340 маршрутизации ATC может определить, потребуется ли автономному транспортному средству, возможно, (i) изменение места 313 загрузки или места 315 разгрузки или (ii) помощь транспортного средства, управляемого человеком (как показано в примере на фиг. 2). В последнем случае процесс 340 маршрутизации ATC может определить вероятное время ожидания или задержки для этого автономного транспортного средства. Процесс 340 маршрутизации ATC может использовать расчёт 344 стоимости, чтобы определить метрику 345 стоимости ATC при использовании автономного транспортного средства для выполнения запроса 301 на транспортировку. Расчёт 344 стоимости может включать в себя формулу 346 стоимости (например, размер тарифа для клиента на получение транспортировки) и компонент 348 синхронизации затрат для определения параметров, связанных со временем, для конкретного выбора.
[0075] При определении метрики 345 стоимости ATC некоторые варианты предусматривают, что расчёт 344 стоимости может включать в себя вероятностные определения относительно необходимости отклонения автономного транспортного средства от маршрута или ожидания (направления транспортным средством, управляемым человеком, и т.д.). Соответственно, метрика 345 стоимости может учитывать стоимость синхронизации, т.е. дополнительное время, которое понадобится клиенту (или средству, выполняющему транспортную услугу), чтобы выполнить запрос 301 на транспортировку с помощью автономного транспортного средства. Метрика 345 стоимости также может включать в себя цену или сервисный сбор для автономного транспортного средства с возможными дополнениями, возникающими из-за дополнительного расстояния (например, из-за изменения маршрута или места выгрузки) или времени ожидания (например, для ведущего транспортного средства, управляемого человеком). В вариантах метрика 345 стоимости может учитывать другие расходы для клиента, поставщика транспортной услуги или даже для водителей. Эти другие расходы могут включать в себя, например, спрос на топливо или сокращение спроса на наличие конкретного типа транспортного средства. Например, если запрос 301 на транспортировку указывает местами оказания услуги районы, о которых известно, что они проблематичны для автономного транспортного средства, то процесс 340 маршрутизации ATC может учесть издержки упущенных возможностей для этой услуги, состоящие в том, что автономное транспортное средство может быть более подходящим для других запросов на транспортировку, которые, возможно, будут получены, пока происходит работа с запросом 301 на транспортировку.
[0076] Процесс 340 маршрутизации ATC может включать в себя альтернативный пример процесса 342 маршрутизации ТСУЧ, который определяет маршрут и стоимость ("метрика 355 стоимости ТСУЧ") при использовании в транспортных средствах, управляемых человеком. Метрика 355 стоимости ТСУЧ может быть главным образом денежной, если предположить, что стоимость использования для автономного транспортного средства такая же или больше, чем для транспортных средств, управляемых человеком. Расчёт 354 стоимости для определения метрики 355 стоимости ТСУЧ может быть проведён также с использованием соответствующей формулы 356 стоимости ТСУЧ и программы 358 синхронизации (например, для определения PB).
[0077] Компоненты 340, 342 маршрутизации ATC и ТСУЧ могут обеспечить параметры 351, 353 метрики стоимости для базы 330 сравнения маршрутизации. Параметры 351, 353 метрики стоимости могут соответствовать, например, наборам параметров и/или нормированных значений, которые позволяют сравнивать различные аспекты стоимости, в том числе денежную стоимость для клиента, базовую стоимость для поставщика транспорта и/или потерянную стоимость упущенной возможности для клиента и поставщика. База 330 сравнения маршрутизации может сравнить параметры 351, 353 метрики стоимости, определённые из соответствующего компонента 340, 342 маршрутизации ATC и ТСУЧ, чтобы определить основанный на стоимости параметр 331 выбора. Основанный на стоимости параметр 331 выбора может отражать, например, сравнение денежной стоимости для клиента, а также другие параметры стоимости, в т.ч. стоимость транспортной услуги или скрытые расходы, такие как потерянное время или добавленные транспортные ресурсы (например, такие как предоставление ведущего транспортного средства, управляемого человеком).
[0078] При определении основанного на стоимости параметра 331 выбора некоторые варианты предусматривают для базы 330 сравнения маршрутизации сравнивать имеющийся общий фонд 365 транспортных средств, управляемых человеком, с общим фондом 367 автономных транспортных средств. Например, система 300 предоставления транспортировки может поддерживать сервисный интерфейс 370, который отслеживает общий фонд активных транспортных средств, а затем обновляет соответствующие хранилища данных, чтобы отразить текущие спрос и предложение на транспортные средства, управляемые человеком, ("общий фонд ТСУЧ 365") и на автономные транспортные средства ("общий фонд ATC 367"). Например, цена за единицу для каждого типа транспортного средства может увеличиваться при росте спроса относительно предложения на данный момент. Более того, спрос и предложение соответствующих общих фондов 365, 367 транспортных средств, управляемых человеком, и автономных транспортных средств могут повлиять как системная стоимость, если один общий фонд является относительно перегруженным/недогруженным относительно другого общего фонда. В примере на фиг. 3 программа 384 предложения/спроса может создавать параметры 385 спроса ("ПС 385"), отражающие спрос или доступность каждого из соответствующих общих фондов 365, 367. База 330 сравнения маршрутизации может использовать параметр 385 спроса для сравнения относительной стоимости каждого типа транспортного средства. Таким образом, основанный на стоимости параметр 331 выбора может включать в себя некоторую переменную или некоторое значение, чтобы отражать параметр 385 спроса.
[0079] База 330 сравнения маршрутизации может передать основанный на стоимости параметр 331 выбора в программу 320 принятия решения ATC/ТСУЧ. Программа 320 принятия решения ATC/ТСУЧ может сделать выбор 375 типа транспортного средства на основе параметра 335 выбора предпочтения и/или основанного на стоимости параметра 331 выбора. Параметр 335 выбора предпочтения и основанный на стоимости параметр 331 выбора могут быть объединены по какому-то правилу, с учётом какого-то весового коэффициента или как-то иначе, чтобы отражать (i) абсолютные определения, в которых исключается один тип транспортного средства (например, выраженный запрос пользователя на транспортное средство, управляемое человеком, исключает автономное транспортное средство) и/или (ii) взвешенные или расчётные определения на основе применения параметра 335 выбора предпочтения и/или основанного на стоимости параметра 331 выбора.
[0080] Примеры далее предусматривают, что программа 320 принятия решения ATC/ТСУЧ может дать предложения или рекомендации, основанные на выборе 375 типа транспортного средства программы 320 принятия решения ATC/ТСУЧ. Например, если пользовательское выраженное предпочтение (например, указанное в запросе 301 на транспортировку или в пользовательской настройке) или предполагаемое предпочтение (например, на основе прошлых транспортировок) сильно сдвинуто к выбору транспортного средства, управляемого человеком, то программа 320 принятия решения ATC/ТСУЧ может выполнить параллельно расчёты, чтобы дать рекомендацию для автономного транспортного средства на том основании, что это средство, например, на данный момент больше предлагается и/или оно дешевле.
[0081] В одном варианте осуществления выбор 375 типа транспортного средства может быть передан компоненту 382 диспетчеризации, который затем может выбрать транспортное средство (как показано идентификатором 361 транспортного средства) на основе типа транспортного средства. Выбор 375 типа транспортного средства может быть передан также на пользовательский интерфейс 302, чтобы проинформировать клиента о выборе. В одном из вариантов клиент может изменить или отменить этот выбор.
ДИСТАНЦИОННАЯ СИСТЕМА ОБРАТНОЙ СВЯЗИ С УЧАСТИЕМ ЧЕЛОВЕКА
[0082] ФИГ. 4 показывает пример системы, использующей людей-водителей для поддержки автономных транспортных средств при обработке и/или интерпретации событий или состояний на дороге. Как показано в некоторых примерах, люди-операторы могут дистанционно поддерживать автономное транспортное средство 101, когда, например, появляется угроза безопасности для автономного транспортного средства.
[0083] Как другая альтернатива люди-операторы могут дистанционно поддерживать автономное транспортное средство 101, когда, например, автономное транспортное средство испытывает трудности с интерпретацией события или состояния и запрашивает информацию для дальнейшей обработки или обучения. Например, САТС 100 может реализовать одну или несколько моделей обучения для интерпретации дорожных объектов или других состояний или событий. САТС 100 в рамках реализации обучения может определять природу, характеристику или другой атрибут объекта, используя, например, одну или несколько изученных моделей. Когда такая идентификация выполнена, САТС 100 может проверить ответ с помощью удалённого человека-оператора и использовать ответ для обновления учебной модели.
[0084] В примере на фиг. 4 дистанционная система обратной связи с участием человека для автономных транспортных средств ("ДСОСУЧ 400") может реализовать удалённый сервис 30 поддержки со стороны человека-оператора (см. фиг. 1) при обмене данными с САТС 100. В примере на фиг. 4 САТС 100 может включать в себя выходную программу или функциональность 410 датчиков для быстрого выбора и передачи данных 411 от выбранного датчика в удалённую систему 400 поддержки со стороны человека-оператора через сервисный интерфейс 140. Набор 411 данных от выбранного датчика может быть определён отдельно от данных 111 от датчиков, переданных на контроллер 144 для управления транспортным средством.
[0085] Согласно одному аспекту интерфейс 105 датчиков получает исходные данные 99 от датчиков от различных компонентов с датчиками, а компонент 110 анализа датчиков реализует такие функции, как обнаружение объектов, распознавание изображений, обработка изображений и другие процессы, связанные с датчиками, для обнаружения опасностей или неизвестных объектов или событий на проезжей части. В этом отношении компонент 110 анализа датчиков может быть реализован несколькими различными процессами, каждый из которых анализирует различные наборы 95 данных профиля датчика. В примере на фиг. 4 компонент 110 анализа датчиков включает в себя библиотеку 445 ответов для определения соответствующих ответов на известные объекты. Когда компонент 110 анализа датчиков интерпретирует характер объекта с достаточной надёжностью и может выбрать или идентифицировать соответствующий ответ из библиотеки 445 ответов, то этот компонент 110 анализа датчиков может передать ответное действие 447 ("ОД 447") на контроллер 144. Контроллер 144 может затем реализовать сигналы 149 управления транспортным средством для осуществления управления подсистемой 130 интерфейса транспортного средства, включая выбор интерфейсов, таких как интерфейс 136 тормоза и/или интерфейс 134 рулевого управления. Сигналы 149 управления транспортным средством могут осуществлять ответное действие 447 по умолчанию независимо от какой-либо удалённой поддержки или вмешательства человека.
[0086] Пример фиг. 4 предусматривает, однако, что автономные транспортные средства имеют тенденцию быть осторожными и медлительными. Например, когда автономное транспортное средство 101 используется для перевозки пассажиров, САТС 100 может реализовать компонент 110 анализа датчиков для многократного анализа воспринимаемых объектов и состояний. В силу природы автономного транспортного средства 101 автономное транспортное средство 101 замедляется или тормозится для оценки неизвестных объектов или состояний или для выбора ответного действия, когда наилучшее ответное действие неизвестно с достаточной надёжностью. В результате автономное транспортное средство 101 может во время поездки часто замедляться, останавливаться и снова разгоняться, что делает поездку некомфортной. Однако примеры далее предусматривают, что, если компонент 110 анализа датчиков сможет быстрее распознавать объекты или состояния или быстрее выбирать ответное действие, то автономное транспортное средство 101 будет иметь меньше тормозить (например, с целью уменьшения скорости или останова). Уменьшение количества событий торможения может сделать автономное транспортное средство 101 более подходящим для перевозки пассажиров, так как уменьшение количества событий торможения делает поездку пассажиров в автономном транспортном средстве 101 более комфортной.
[0087] Соответственно, САТС 100 может быть сконфигурирована для оптимизации передачи данных 411 от выбранного датчика от автономного транспортного средства 101 в ДСОСУЧ 400, а также для передачи данных 411 от датчика в таком формате или с такой структурой, которые допускают их быструю визуализацию для восприятия человеком, благодаря чему человек-оператор может выполнить быстрый и надлежащий ввод, определяющий ответное действие САТС 100. Автономное транспортное средство 101 может реализовать или сконфигурировать компонент 110 анализа датчиков так, чтобы выдавать один или несколько типов предупреждений 413, когда анализ наборов 95 профиля датчика идентифицирует (i) неизвестный или неожиданный объект или неизвестное или неожиданное состояние на пути транспортного средства (например, камера дальнего действия обнаруживает мешок на дороге, но обработка изображения не распознаёт мешок или не отличает мешок от камня или твёрдого объекта) и/или (ii) относительно известный объект или относительно известное состояние, требующий(ее), возможно, реакции, результат которой является довольно неопределённым (например, обнаружен аварийный автомобиль на дороге; реакция - съехать на обочину - является неопределённой с позиции условий окружающей среды или событий). Предупреждения 413 могут задавать или инициировать запрос на помощь. Предупреждения 413 в вариантах могут указывать различные виды запрашиваемой помощи, такие как, например, помощь для идентификации объекта или состояния, помощь в идентификации ответа на событие или состояние и/или предупреждение для идентификации объекта или состояния и соответствующего ответа для обработки объекта или состояния. Кроме того, предупреждения 413 в других вариантах могут указывать уровни срочности и дополнительно назначать временные границы для реакции на запрос о поддержке со стороны человека. Например, срочное предупреждение может ожидать получение ответа менее двух секунд, после чего автономное транспортное средство 101 реализует ответное действие по умолчанию, выполнив жёсткое торможение. Среднесрочное предупреждение может ожидать получение ответа менее 3 секунд, после чего автономное транспортное средство 101 реализует ответное действие по умолчанию, выполняя умеренное торможение и продолжая отслеживать ответ на запрос о поддержке со стороны человека. Разница в уровнях срочности может основываться, например, на близости объекта или состояния при его обнаружении, на скорости транспортного средства, размерах объекта или на других воспринимаемых физических характеристиках объекта, вызывающего беспокойство.
[0088] Предупреждения 413 в одном из вариантов поступают в удалённую систему 400 поддержки со стороны человека-оператора через сервисный интерфейс 140. Компонент 110 анализа датчиков может содержать выходную программу 410 датчиков, позволяющую идентифицировать, фильтровать или сортировать соответствующие данные датчиков, обеспечивая передачу при запуске наиболее существенной информации от датчиков. Выходной набор 411 данных от датчиков может быть создан для получения отсортированной и расположенной в соответствии с приоритетом информации для некоторого события или состояния. Элементы данных от датчиков из набора 95 профиля датчика, которые выбраны в качестве выходного набора 411 данных от датчиков, могут быть основаны, например, на таком сенсорном представлении или восприятии, которое обеспечивает наибольшую информацию о неизвестном объекте или состоянии. Выходной набор 411 данных от датчиков может служить или быть частью предупреждения 413.
[0089] В примере на фиг. 4 ДСОСУЧ 400 включает в себя интерфейс автономного транспортного средства ("ATC-интерфейс 432") и компонент 434 интерфейса человека-оператора. ATC-интерфейс 432 обрабатывает предупреждения 413 от одного или нескольких автономных транспортных средств 101. В одном варианте осуществления каждое предупреждение 413 может быть назначено какому-то человеку-оператору. Таким образом, предупреждение 413 может быть проанализировано ATC-интерфейсом 432 для идентификатора 421 автономного транспортного средства 101 и затем направлено в компонент 434 интерфейса человека-оператора соответствующего человека-оператора. Ответ 435 от человека-оператора может быть передан обратно автономному транспортному средству с идентификатором 421. Каждое предупреждение 413 может также содержать полезную информацию или данные 411 от выбранного датчика, идентифицирующие объект, состояние или событие, для которого требуется ввод. Компонент 434 интерфейса человека-оператора может быть ориентирован на немедленное отображение данных 411 от датчика таким способом, который облегчает их восприятие человеком и уменьшает время реагирования. Например, компонент 434 интерфейса человека-оператора может организовать данные 411 от датчика так, чтобы отражать или сохранять ориентацию и направленность автономного транспортного средства 101 на тот момент времени, когда эти данные от датчика были получены. Компонент 434 интерфейса человека-оператора может также реализовать процессы для постепенного открывания или отображения данных 411 датчика, при этом сначала обрабатываются меньшие элементы данных.
[0090] Компонент 434 интерфейса человека-оператора может также содержать один или несколько интерфейсов для человека-оператора, которые облегчают процесс понимания человеком-оператором. Например, компонент 434 интерфейса человека-оператора может включать в себя вид имитационного моделирования из автономного транспортного средства 101 или с точки, находящейся вне транспортного средства. В некоторых вариантах компонент 434 интерфейса человека-оператора может обеспечить трёхмерное представление проезжей части и/или автономного транспортного средства или вид со стороны третьего лица. Как дополнение или альтернатива компонент 434 интерфейса человека-оператора может создавать и отображать один или несколько картографических интерфейсов для вывода на экран соответствующих карт (например, карты, показывающие окружение дороги, по которой двигается автономное транспортное средство) для дороги данного автономного транспортного средства 101. Кроме того, компонент 434 интерфейса человека-оператора может включать в себя функциональные возможности, позволяющие человеку-оператору запрашивать дополнительную информацию. Компонент 434 интерфейса человека-оператора может позволить оператору сделать запрос хотя и без специфики или конкретики, но в значительной степени с использованием зрительной интуиции. Например, оператор вместо того, чтобы запрашивать дополнительные данные от конкретного датчика, может просто указать на требуемое ему место на зрительном представлении транспортного средства, после чего этот запрос оператора может быть автоматически преобразован в запрос на исходные или обработанные данные датчиков от определённого набора датчиков для участка, идентифицированного оператором. Например, оператор может запросить просмотр над транспортным средством или просмотр изображения с камеры дальнего действия, и этот запрос может быть передан оператором путём прикасания к экрану дисплея на участках над транспортным средством или перед ним.
[0091] В соответствии с некоторыми примерами может быть обеспечена программа 450 меню предварительного реагирования с функциональными характеристиками ДСОСУЧ 400 или САТС 100, чтобы уменьшить время реагирования человека-оператора. В одной реализации программа 450 меню предварительного реагирования может быть реализована как часть компонента 434 интерфейса человека-оператора, чтобы отобразить набор опций для человека-оператора. Как дополнение или вариант программу 450 меню предварительного ответа можно выполнять частично или полностью с САТС 100, так что соответствующее меню опций 455 реагирования выбирают на основе контекста и известной информации о неизвестном объекте, состоянии или событии. Например, если нераспознанный объект находится далеко перед автономным транспортным средством 101, то программа 450 меню предварительного реагирования может сработать так, чтобы обеспечить первое предварительно заданное меню или первый набор опций, из которых человек-оператор может сделать выбор. Если неизвестный объект находится сбоку или за автономным транспортным средством 101, то программа 450 меню предварительного реагирования может сработать так, чтобы обеспечить второе предварительно заданное меню или второй набор опций. Таким образом, вариант предусматривает, что контекст и другая информация, которые имеется о неизвестном объекте, событии или состоянии, могут быть использованы для выбора опций, из которых человек-оператор может сделать выбор. Выбор человека-оператора может соответствовать ответному действию, команду на реализацию которого получает автономное транспортное средство 101. Например, меню опций 455 реагирования может задать некоторый набор действий, который определяют конкретное действие для рулевого управления и/или для управления скоростью. Пример меню опций 455 реагирования, которое может быть создано в программе 450 меню предварительного ответа и представлено в компоненте 434 интерфейса человека-оператора, показан на фиг. 15.
ИНТЕРФЕЙСНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА, УПРАВЛЯЕМОГО ЧЕЛОВЕКОМ
[0092] ФИГ. 5 показывает интерфейсную систему транспортного средства, управляемого человеком, для использования с примерами, как описано здесь. Согласно некоторым реализациям интерфейсная система 500 транспортного средства, управляемого человеком, может быть реализована с использованием мобильного компьютерного устройства водителя. Например, устройство сотовой телефонии водителя может включать в себя приложение для обеспечения функциональности с целью реализации интерфейсной системы 500 транспортного средства, управляемого человеком. В вариантах транспортное средство с водителем может иметь некоторые или все компоненты и функциональные возможности, описанные для обеспечения интерфейсной системы 500 транспортного средства, управляемого человеком. Кроме того, некоторые транспортные средства могут содержать вспомогательные компоненты, которые работают независимо от других аспектов интерфейсной системы 500 транспортного средства, управляемого человеком.
[0093] В примере на фиг. 5 интерфейсная система 500 транспортного средства, управляемого человеком, включает в себя процессор 510, ресурсы 520 памяти, устройство 530 отображения (например, сенсорное устройство отображения), один или несколько портов 540 беспроводной связи (в т.ч. подсистемы беспроводной связи) и один или несколько механизмов 560 обнаружения местоположения. Интерфейсная система 500 транспортного средства, управляемого человеком, также может содержать набор вспомогательных датчиков 550 для зондирования окружающей среды транспортного средства, например, когда это транспортное средство действует как ведущее для автономного транспортного средства 101. В вариантах набор вспомогательных датчиков 550 может включать в себя, например, набор сенсорных устройств, такой как показанный и описанный с автономным транспортным средством 101 на фиг. 1. Датчики могут, например, выступать за пределы транспортного средства и давать двух- или трёхмерные изображения рассматриваемого места, изображения над или под автомобилем, а также изображения окружающей области от сонара или лидара.
[0094] Для механизмов 560 обнаружения местоположения могут быть использованы различные геоинформационные ресурсы и механизмы определения местоположения. В качестве примера механизм обнаружения местоположения, имеющий интерфейсную систему 500 транспортного средства, управляемого человеком, может включать в себя ресурсы системы глобального позиционирования (GPS), визуальную одометрию, распознавание ориентиров (например, обработка изображений с датчиков камер) и/или обработку датчиков движения. В некоторых примерах механизмы обнаружения местоположения могут обеспечивать резервные или альтернативные возможности применительно к GPS по определению местоположения, когда, например, интерфейсная система 500 транспортного средства, управляемого человеком, плохо принимает GPS-сигнал или он вообще отсутствует. Порт 540 беспроводной связи может отправлять и принимать беспроводные данные по одному или нескольким каналам беспроводной передачи данных (например, сотовые каналы). В примере на фиг. 5 ресурсы 520 памяти могут хранить команды для блока 522 уведомлений. Процессор 510 может выполнять команды блока 522 уведомлений, чтобы отображать или формировать уведомления 521 на устройстве 530 отображения. Уведомления 521 могут, например, быть сформированы или иным образом построены из данных, переданных из системы 200 поддержки направления со стороны транспортного средства, управляемого человеком, фиг. 2. Устройство 530 отображения может отображать, например, сообщения, которые информируют водителя о роли, которую водитель должен выполнять в ведении автономного транспортного средства 101. Пример уведомлений 521, показываемых водителю ведущего транспортного средства, представлен на фиг. 11А - 11С.
[0095] Когда интерфейсная система 500 транспортного средства, управляемого человеком, работает на транспортном средстве, действующем как ведущее, то процессор 510 также может принимать команды 527 направления (или команды поддержки на маршруте) через порт 540 беспроводной связи. Команды 527 направления могут, например, отображаться как справочный контент 529, который предоставляет визуальную и/или текстовую информацию, чтобы помочь водителю в определении местоположения автономного транспортного средства 101 и далее в движении таким образом, чтобы облегчить автономному транспортному средству отслеживание или сопровождение.
[0096] Блок 522 уведомлений может также поддерживать связь с водителем и инициировать водителя на включение или иным образом управление набором вспомогательных датчиков 550. Например, блок 522 уведомлений может использовать напоминания 525 о местоположении, полученные от системы 200 поддержки направления со стороны транспортного средства, управляемого человеком, (см. фиг. 2) через порт 540 беспроводной связи, чтобы уведомить, когда водитель должен инициировать запись информации 535 от датчиков, используя, например, набор вспомогательных датчиков 550. Таким образом, например, ведущее транспортное средство, управляемое человеком, может выполнять ещё одну роль - запись информации 535 от датчиков для конкретного участка дороги, который является трудным для перемещения одиночного автономного транспортного средства 101. С дополнительной информацией, полученной из информации 535 от датчиков, система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может определить информацию, позволяющую другим транспортным средствам облегчить прохождение проблемного участка дороги или обойти его. Например, информация 209 от датчиков может быть обработана и реализована как информация, которая содержит часть специфической для региона информации от источника 217 (см. фиг. 2).
[0097] В некоторых вариантах набор вспомогательных датчиков 550 может работать независимо и/или отдельно от других компонентов интерфейсной системы 500 транспортного средства, управляемого человеком. Например, в одной реализации процессор 510 может реализовать управление 511 по одному или нескольким вспомогательным датчикам, например, посредством выдачи сигнала, когда сенсорные устройства должны работать. Дополнительно процессор 510 может принимать записанную информацию 535 от датчиков и сохранять данные и/или передавать данные в удалённый сервис, который может обрабатывать или иным образом использовать эти данные. Однако в вариантах набор 550 вспомогательных датчиков может работать независимо от процессора 510, который может находиться на мобильном компьютерном устройстве водителя. Таким образом, набор 550 вспомогательных датчиков может опционально включать в себя отдельные ресурсы беспроводной связи, памяти и обработки и далее работать под управлением удалённого сервиса.
[0098] В некоторых вариантах интерфейсная система 500 транспортного средства, управляемого человеком, может быть реализована как мобильное компьютерное устройство, которое также получает команды или напоминания от удалённого сервиса, чтобы инициировать водителя на получение информации о дороге. Например, процессор 510 может получить информационное напоминание через порт 540 беспроводной связи, которое может быть выведено на устройство 530 отображения или через аудиоканал, чтобы инициировать водителя предоставить информацию или предпринять другое действие (например, съехать на обочину и использовать камеру на мобильном компьютерном устройстве, чтобы сделать снимок участка дороги).
КОМПЬЮТЕРНАЯ СИСТЕМА УДАЛЁННЫХ СЕРВИСОВ ИЛИ СИСТЕМ
[0099] На ФИГ. 6 показана блок-схема, иллюстрирующая компьютерную систему, на которой могут быть реализованы варианты осуществления, описанные здесь. Компьютерная система 600 может быть реализована, например, на сервере или на комбинации серверов. Например, компьютерная система 600 может быть реализована как часть сетевого сервиса, такого как сервис 10 предоставления транспортировки (см. фиг. 1) или система 300 (см. фиг. 3), сервис 20 поддержки направления со стороны ТСУЧ (см. фиг. 1) или система 200 (см. фиг. 2) и/или удалённый сервис 30 поддержки со стороны человека-оператора (см. фиг.1) или система (см. фиг. 4). В контексте фиг. 1-4 сервисы и соответствующие системы для предоставления транспортировки, обеспечения сервиса по направлению со стороны транспортных средств, управляемых человеком, и/или удалённого сервиса поддержки со стороны человека-оператора могут быть реализованы с использованием компьютерной системы или комбинации компьютерных систем, таких как показано на фиг. 6. Как альтернатива серверу или комбинации серверов любой из сервисов или любая из систем, показанный (показанная) как пример, может быть реализован(а) с использованием комбинации нескольких компьютерных систем, как показано на фиг. 6.
[0100] В одной реализации компьютерная система 600 включает в себя ресурсы 610 обработки, ресурсы 620 памяти (в т.ч. постоянное запоминающее устройство (ПЗУ) и/или накопитель) и интерфейс 650 связи. Компьютерная система 600 включает в себя, по меньшей мере, один процессор 610 для обработки информации, хранимой в ресурсах 620 памяти. Ресурсы 620 памяти включают в себя компонент основной памяти, оперативное запоминающее устройство (ОЗУ) и/или другое динамическое запоминающее устройство для хранения информации и команд, которые исполняет процессор 610. Ресурсы 620 памяти также могут быть использованы для хранения временных переменных или другой промежуточной информации во время выполнения команд, поступающих на процессор 610. Ресурсы 620 памяти могут использовать ПЗУ или другое статическое запоминающее устройство для хранения статической информации и команд для процессора 610. Для хранения информации и команд предусмотрен накопитель, такой как магнитный или оптический диск.
[0101] Интерфейс 650 связи позволяет компьютерной системе 600 взаимодействовать с одной или несколькими сетями 680 (например, с сотовой сетью) через сетевую линию связи (беспроводная или проводная). Через сетевую линию связи компьютерная система 600 может связываться с одним или несколькими компьютерными устройствами, например с автономными транспортными средствами 101 и/или с устройствами, которые используются с интерфейсной системой 500 транспортного средства, управляемого человеком, или используются как такая система (см. фиг. 5). В соответствии с примерами компьютерная система 600 принимает информацию о местоположении для транспортных средств, управляемых человеком, и автономных транспортных средств, которые объединяются в рамках одного сервиса или нескольких сервисов, как описано, чтобы обеспечить гибридизацию расширенных или дополненных сервисов. Исполняемые команды, хранящиеся в памяти 630, могут включать в себя (i) команды 621 для реализации сервиса 10 предоставления транспортировки (см. фиг. 1) и его системы (см. фиг. 3) ("КРТ 621"), (ii) команды 623 для реализации сервиса 20 поддержки направления со стороны ТСУЧ (см. фиг. 1) и его системы (см. фиг. 2) ("ТСУЧ ПН 623") и (iii) команды 625 для реализации удалённого сервиса 30 поддержки со стороны человека-оператора (см. фиг. 1) и его системы (см. фиг. 4) ("УСПЧО 625"). Например, выполнение команд 625 может привести к тому, что пользовательский интерфейс будет представлен на дисплее, связанном с компьютерной системой 600, чтобы позволить человеку-оператору выдавать команды по ситуации через механизм ввода для передачи автономному транспортному средству, как описано в соответствии с фиг. 4.
[0102] Примеры, описанные здесь, связаны с использованием компьютерной системы 600 для реализации описанных здесь способов. В соответствии с некоторыми примерами эти способы осуществляются компьютерной системой 600 в ответ на выполнение процессором 610 одной или нескольких последовательностей одной или нескольких команд, содержащихся в основной памяти ресурсов 620 памяти. Такие команды могут быть считаны в основную память с другого машиночитаемого носителя, такого как, например, накопитель. Выполнение последовательностей команд, содержащихся в ресурсе 620 памяти, заставляет процессор 610 выполнять описанные здесь этапы процесса. В альтернативных вариантах осуществления проводная схема может быть использована вместо команд программного обеспечения или в сочетании с ними для реализации примеров, описанных здесь. Таким образом, описанные примеры не ограничиваются какой-либо конкретной комбинацией аппаратных схем и программного обеспечения.
МЕТОДОЛОГИЯ И ПРИМЕРЫ ПОДДЕРЖКИ В УПРАВЛЕНИИ СО СТОРОНЫ ТРАНСПОРТНОГО СРЕДСТВА, УПРАВЛЯЕМОГО ЧЕЛОВЕКОМ
[0103] ФИГ. 7 показывает пример способа, который может быть реализован на автономном транспортном средстве с целью получения направления, осуществляемого человеком. ФИГ. 8 показывает пример способа, который может быть реализован в сервисе для сопряжения автономного транспортного средства с транспортным средством, управляемым человеком, с целью получения направления, осуществляемого человеком. ФИГ. 9 показывает пример способа выдачи команд человеком-оператором для управления транспортным средством с целью поддержки автономного транспортного средства. Примеры способов, показанные на фиг. 7-9, могут быть реализованы с использованием, например, систем и сервисов, показанных, например, на фиг. 1 и фиг. 2. Дополнительно аппаратные компоненты и функциональные возможности для реализации аспектов интерфейсной системы транспортного средства, управляемого человеком, в связи с использованием транспортного средства, управляемого человеком, в качестве ведущего, могут использовать аппаратные компоненты и функциональные возможности, такие как показанные в примере на фиг. 5. Кроме того, аппаратные компоненты и функциональные возможности для реализации аспектов сетевого сервиса могут быть реализованы с использованием компьютерной системы, такой как показанная в примере на фиг. 6. При описании примеров на фиг. 7-9 можно сделать ссылку на элементы на фиг. 1, 2, 5 и 6 с целью иллюстрации подходящих компонентов и функциональных возможностей для осуществления или выполнения описанных действий.
[0104] В соответствии с фиг. 7 автономное транспортное средство 101 может предоставлять транспортные услуги в форме перевозки пассажиров или доставки упаковок или предметов. САТС 100 автономного транспортного средства 101 может действовать, непрерывно выявляя события или состояния, которые влияют на значение степени надёжности САТС 100 с позиции безопасности прохождения маршрута. Более конкретно, значение степени надёжности, которое определяется у САТС 100, может отражать множество параметров, в зависимости от разработки и реализации. В некоторых примерах это значение степени надёжности отражает (i) уровень определённости того, как САТС 100 обрабатывает и интерпретирует дорожную ситуацию, (ii) события или состояния, влияющие на дорожную ситуацию, и/или (iii) действия, которые должна выполнить САТС 100, чтобы безопасно продвигаться по маршруту к месту назначения. В этом отношении события или состояния, с которыми САТС 100 сталкивалась ранее, могут иметь более высокое значение степени надёжности, тогда как относительно новые или никогда ранее не встречавшиеся сценарии могут давать низкое значение степени надёжности. В городских условиях, такие явления, как, например, интенсивное движение, дорожное строительство, действия пешеходов, и многие другие ситуации часто могут быть восприняты как относительно новое состояние или событие, поскольку природа таких событий или состояний является относительно уникальной в разные моменты времени, а также в разных географических точках регионах.
[0105] САТС 100 автономного транспортного средства 101 может предварительно определить пороговый уровень (или пороговые уровни), ниже которого значение степени надёжности должно считаться небезопасным (710). Кроме того, САТС 100 может настраивать эти пороговые значения, чтобы отражать изменяющуюся среду или набор состояний. В разных географических регионах могут потребоваться разные пороговые значения для значений степени надёжности, которые считаются безопасными или небезопасными. Например, географический регион, который имеет относительно меньшую интенсивность движения и меньше опасностей на дорогах, а также транспортные средства, двигающиеся с относительно меньшей скоростью, может иметь значение степени надёжности, которое является более терпимым к неопределённости в сенсорном восприятии САТС 100. В соответствии с одним примером оператор системы предоставления транспортировки может задавать предварительно определённые пороговые уровни для САТС 100.
[0106] Событие или состояние, которое влияет на значение степени надёжности для САТС для определения действия, основанного на предварительно определённых пороговых значениях (720). Согласно некоторым примерам САТС 100 может согласиться с компонентом системы, который обнаруживает событие или состояние (722). В некоторых вариантах удалённый сервис (например, удалённый сервис 30 поддержки со стороны человека-оператора, фиг.1) может обнаруживать или прогнозировать событие или состояние (724).
[0107] Когда это событие или состояние обнаружено, то автономное транспортное средство 101 получает поддержку (730). Когда, например, САТС 100 обнаруживает событие или состояние, для которых значение степени надёжности ниже порогового значения для безопасного прохождения, то САТС 100 может генерировать запрос 121 о событии (см. фиг. 1). В некоторых вариантах услуга, запрошенная автономным транспортным средством 101 или предоставленная ему, может быть основана на типе обнаруженного события или состояния. Например, в соответствии с примером на фиг. 1 системе САТС 100 может быть доступно несколько сервисов поддержки автономных транспортных средств. САТС 100 автономного транспортного средства 101 может определить, к какому сервису следует обратиться или у какого сервиса запросить поддержку, используя, например, информацию или программы, базирующиеся на компьютере. При выполнении запроса САТС 100 может выдать запрос 121 о событии на, например, одну или несколько беспроводных сетей для обработки с помощью выбранного сетевого сервиса. В примере на фиг. 7 запрос 121 о событии может быть задан с помощью системы 200 поддержки направления со стороны транспортного средства, управляемого человеком, как показано в примере на фиг. 2. Автономное транспортное средство 101 может получить поддержку в направлении от транспортного средства, управляемого человеком, чтобы облегчить автономному транспортному средству прохождение через участок дороги, который создаёт трудности для САТС 100.
[0108] В некоторых примерах САТС 100 может реализовать получение направления от транспортного средства, управляемого человеком, в виде отдельных фаз, и для каждой фазы могут потребоваться различные типы действий от автономного транспортного средства 101. Сначала САТС 100 может получить от компонента 210 анализа маршрута команду прибыть к месту 213 встречи, где автономное транспортное средство 101 может ждать прибытия выбранного ведущего транспортного средства (732), управляемого человеком. В одном базовом примере команды для автономного транспортного средства могут просто указать, что автономное транспортное средство 101 должно припарковаться или съехать на обочину и остановиться на первом доступном открытом пространстве на текущем участке дороги. Однако примеры признают, что события или состояния, которые создают неопределённость для транспортного средства, часто препятствуют тому, чтобы транспортное средство могло съехать на обочину и остановиться или припарковаться. Например, экстремальные дорожные заторы и/или действия пешеходов могут помешать автономному транспортному средству 101 найти или получить доступ к парковочному месту или к обочине дороги, где транспортное средство может припарковаться и ждать. Таким образом, в вариантах САТС 100 может получить команду в виде маршрута для перехода в место (734) встречи. Команды могут также указать, что автономное транспортное средство 101 должно ждать на месте встречи, а также выполнить другие действия, связанные с обеспечением безопасности, такие как включение фар и/или аварийных огней (736). Определение того, какие действия транспортное средство должно выполнить, например, включение света, может быть основано частично на факторах окружающей среды, таких как время суток, погодные условия, интенсивность движения или величина затора на участке, где задано место встречи, и различных других условий. САТС 100 может выполнять команды, используя подсистему 130 интерфейса транспортного средства. Например, система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может передать информацию 141 о маршруте на САТС 100 так, что контроллер 144 сможет осуществлять управление 147 маршрутом и вызвать подсистему 130 интерфейса транспортного средства для направления транспортного средства к месту 213 встречи. На месте 213 встречи система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может передать команды 151, и контроллер 144 сможет выработать сигналы 149 управления транспортным средством, побуждающие транспортное средство ждать на месте 213 встречи, а также выполнить другие действия, как, например, включение огней.
[0109] В соответствии с некоторыми вариантами, автономное транспортное средство 101 прибывает на место 213 встречи до ведущего транспортного средства, управляемого человеком. Например, место 213 встречи может быть назначено в непосредственной близости от места расположения автономного транспортного средства 101, когда запрос 121 о событии поступил первый раз. После прибытия на место 213 встречи САТС 100 ждёт обнаружения прибытия ведущего транспортного средства, управляемого человеком. В некоторых вариантах прибытие ведущего транспортного средства, управляемого человеком, может быть реализовано пассивно, когда, например, ведущее транспортное средство, управляемое человеком, просто проезжает мимо и/или вблизи автономного транспортного средства 101. В вариантах ведущее транспортное средство, управляемое человеком, может остановиться на обочине дороги и/или дать разрешение на выполнение какого-то зрительного подтверждения установления связи или другого обмена данными, с помощью которого автономное транспортное средство 101 устанавливает связь для того, чтобы следовать за ведущим транспортным средством или иным образом отслеживать его на данном участке дороги.
[0110] Прибытие ведущего транспортного средства, управляемого человеком, может быть также обнаружено с помощью различных механизмов (740). В одном варианте осуществления интерфейс 240 ТСУЧ отслеживает положение ведущего транспортного средства, и система 200 поддержки направления со стороны транспортного средства, управляемого человеком, передаёт эту информацию о положении на САТС 100. Система 200 поддержки направления со стороны транспортного средства, управляемого человеком, и/или САТС 100 также могут включать в себя, например, бесконтактную логику, которая инициирует на автономном транспортном средстве 101 выполнение операций выбора или облегчение использования ведущего транспортного средства, управляемого человеком. Например, автономное транспортное средство 101 может запустить свой двигатель и/или сориентироваться так, что это транспортное средство сможет встроиться в движение за ведущим транспортным средством.
[0111] После того как прибытие ведущего транспортного средства обнаружено, автономное транспортное средство 101 отслеживает движение ведущего транспортного средства через участок дороги, содержащий точку, где значение степени надёжности (750) у автономного транспортного средства 101 стало меньше допустимого порога. При отслеживании ведущего транспортного средства автономное транспортное средство 101 может выполнять широкий набор операций по ведению, в том числе рулевое управление (752), изменение скорости (754) и/или игнорирование известных правил и/или знания дорожного движения (756), чтобы выполнить некоторое действие, которое будет противоречить тому, что автономное транспортное средство 101 выполнило бы при любых других обстоятельствах. Более подробно, рулевое управление (752) при ведении может выполнять такие действия, как изменение полосы движения автономного транспортного средства 101 и/или выезд этого средства на дорогу при отслеживании маршрута ведущего транспортного средства. В соответствии с фиг. 1 рулевое управление при ведении опционально может быть реализовано с использованием информации о положении ведущего транспортного средства как информация 141 о маршруте, который поступает в контроллер 144 для подсистемы 130 интерфейса транспортного средства. Изменение скорости (754) при ведении может также включать в себя такие действия, как ускорение и торможение, обеспечиваемые автономным транспортным средством 101. Ускорение и/или торможение может быть выполнено независимо от ведущего транспортного средства или без рассмотрения близости к нему, которое фактически может быть расположено далее, чем на один автомобиль или на одну длину автомобиля впереди автономного транспортного средства 101. Конфигурации изменения скорости при ведении могут быть заданы так, чтобы позволить автономному транспортному средству 101 пройти через участок дороги с ведущим транспортным средством, но различное окружение и/или различные события могут потребовать от автономного транспортного средства 101 по-разному осуществлять торможение и/или ускорение при маневрировании на данном участке дороги. Например, ведущее транспортное средство может двигаться по рассматриваемому участку дороги и останавливаться, чтобы пропускать пешеходов, выходящих на дорогу, а это означает, что автономное транспортное средство 101 должно двигаться медленнее, с остановками, пока ведущее транспортное средство не сможет поддерживать более стабильную скорость.
[0112] Что касается (756), то некоторые варианты предусматривают, что САТС 100 соблюдает правила вождения, которые по умолчанию имеют силу, когда состояния или события требуют от САТС 100 принять решение о каком-то действии. Например, САТС 100 может соблюдать правила, касающиеся светофора, согласно которым транспортное средство двигается через светофор на зелёный свет, тормозит перед светофором, если свет становится жёлтым, и полностью останавливается на красный свет. Светофор может задать, что автономное транспортное средство 101 не может въехать на перекрёсток на красный сигнал светофора. Аналогично другое правило может предусматривать, что автономное транспортное средство 101 не будет двигаться по ненадлежащей стороне улицы и/или по обочине дороге или тротуару. Примеры предусматривают, что эти правила, которым САТС 100 может быть обучена, могут иногда конфликтовать с тем, как транспортное средство необходимо вести, чтобы пройти через некоторые сложные состояния проезжей части, например, как это может быть на какой-то трудной стройплощадке. Соответственно, САТС 100 может включать в себя ведомый режим работы, в котором ведущее транспортное средство имеет приоритет по отношению к существующим правилам и знаниям САТС 100. Например, при работе в ведомом режиме автономное транспортное средство 101 может игнорировать светофоры, съезжать с дороги или ехать по ненадлежащей стороне улицы, как это делало бы ведущее транспортное средство, управляемое человеком.
[0113] В соответствии с одним из примеров САТС 100 может также отделиться (или отсоединиться) от ведущего транспортного средства, управляемого человеком, и вернуться в автономный режим по умолчанию (760), если участок дороги становится компьютерно интерпретируемым и/или соответствующее состояние или событие проходит так, что значение степени надёжности САТС 100 превышает порог безопасности. В одном из вариантов осуществления САТС 100 ведёт мониторинг, постоянно наблюдая за проезжей частью и рассчитывая значение степени надёжности для дальнейшего перемещения по дороге самостоятельно. В некотором варианте ведущее транспортное средство, управляемое человеком, (например, человек-оператор) может определить, когда автономное транспортное средство 101 должно отделиться от отслеживания ведущего транспортного средства. Например, может быть использовано суждение человека, и оператор ведущего транспортного средства может выбрать некоторую функцию на телефонной трубке, которая может быть частью интерфейсной системы 500 ведущего транспортного средства, управляемого человеком (см. фиг. 5). Более того, система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может определить, когда автономное транспортное средство 101 и ведущее транспортное средство, управляемое человеком, могут быть разъединены, основываясь на состоянии дороги или иной информации 20.
[0114] В соответствии с фиг. 8 система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может работать как часть сетевого сервиса, который руководит транспортными средствами, управляемыми человеком, входящими в автотранспортный парк (810), или иным образом отслеживает их статус. Мониторинг транспортных средств, управляемых человеком, может включать в себя определение текущего местоположения отдельных транспортных средств, а также состояние работы для каждого транспортного средства. Рабочее состояние каждого транспортного средства может идентифицировать те транспортные средства, которые находятся в активной поездке (812), а также те транспортные средства, которые доступны для использования, но не находятся в активной поездке (814). В некоторых вариантах состояние использования может также идентифицировать те транспортные средства, которые находятся в активной поездке, но в течение установленного времени или заданное значение расстояния будут на месте оказания услуги или разгрузки, после чего транспортное средство больше не будет находиться в активной поездке. Например, система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может определить по активным заказам с пассажирами те транспортные средства, которые ожидают запрос на транспортировку, и те транспортные средства, которые выполняют заказ, но в течение одной минуты прибывают в пункт назначения или разгрузки для данного заказа. Более того, в некоторых вариантах система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может определить те транспортные средства, которые являются активными, но недавно получили заказ и находятся в пути к месту оказания услуги (например, чтобы взять пассажира).
[0115] Система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может получить запрос на поддержку направления, когда, как описано в других примерах, САТС 100 автономного транспортного средства 101 обнаруживает событие или состояние, которое понижает значение степени надёжности для САТС 100 при определении этой системой, может ли автономное транспортное средство 101 безопасно выполнить свою поездку (820). В ответ на приём запроса система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может дать команду автономному транспортному средству 101 двигаться к месту (822) встречи. Эта команда может включать в себя информацию о маршруте к месту встречи. Дополнительно эти команды могут включать в себя дополнительные действия, которые автономное транспортное средство 101 должно выполнить, такие как, например, ожидание на месте встречи, включение своих огней, парковка на имеющемся парковочном месте или остановка на обочине дороги в определённом месте, которое находится недалеко от места встречи. Альтернативно система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может определить, что автономное транспортное средство 101 будет двигаться по некоторой части маршрута (например, участок дороги), которая была идентифицирована как трудная для прохождения.
[0116] Система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может выбрать транспортное средство, управляемое человеком, из общего фонда 92 человеческих ресурсов (см. фиг. 1), которое будет действовать как ведущее при поддержке автономного транспортного средства 101 (830). Могут быть определены (832) ведущее транспортное средство, место встречи и/или близость общего фонда водителей к месту встречи. Выбор транспортного средства, управляемого человеком, может быть основан на множестве факторов, как показано в примере на фиг. 2. Среди других факторов близость или расчётное время у выбранного ведущего транспортного средства для прибытия на место встречи может сформировать критерии или их компоненты для выбора (834). Когда, например, выбранное транспортное средство имеет активное состояние, критерии выбора транспортного средства, управляемого человеком, могут включать в себя время или расстояние, который добавляется к существующему заказу ведущего транспортного средства (например, изменение PB выполняемого заказа) (836), а также способность этого ведущего транспортного средства завершить текущий маршрут, прежде чем отправиться к месту встречи.
[0117] После того как транспортное средство, управляемое человеком, выбрано для направления автономного транспортного средства 101, на это транспортное средство поступают команды двигаться к месту (840) встречи. Эти команды, например, могут задать, что текущий заказ транспортного средства должен продолжаться или что водитель должен завершить текущий заказ, прежде чем направиться к месту встречи.
[0118] На месте встречи автономное транспортное средство 101 может инициировать отслеживание транспортного средства (850), управляемого человеком. Автономное транспортное средство 101 может отслеживать ведущее транспортное средство способом, показанным, например, на фиг. 7. В то время как происходит такое отслеживание, человек-оператор ведущего транспортного средства может быть уведомлён о том, что автономное транспортное средство (852) отслеживает действия ведущего транспортного средства. Например, интерфейсная система 500 ведущего транспортного средства, управляемого человеком, может содержать мобильное компьютерное устройство водителя, которое отображает уведомление 521, идентифицирующее информацию об автономном транспортном средстве 101 и состояние отслеживания автономным транспортным средством 101 действий ведущего транспортного средства (например, отслеживание движения, отслеживание остановки и т.д.). ФИГ. 11А-11С показывают примеры интерфейсов уведомлений, которые могут быть выведены на интерфейсную систему 500 ведущего транспортного средства, управляемого человеком.
[0119] В соответствии с примером на фиг. 9 водитель одного из транспортных средств, управляемых человеком, из общего фонда получил уведомление, предписывающее водителю ехать к месту встречи, чтобы выполнить направление автономного транспортного средства 101 (910). Например, транспортное средство, управляемое человеком, может быть в процессе загрузки или как альтернатива на пути к месту загрузки заказа, когда на экране мобильного компьютерного устройства, которое водитель использует в связи с сервисом 10 предоставления транспортировки, появляется уведомление 521. Транспортное средство, управляемое человеком, может выдать предупреждение или иным образом передать информацию о положении, когда оно оказывается близко к месту (912) встречи или на нём.
[0120] Когда транспортное средство, управляемое человеком, достигает места встречи или проходит рядом с ним, оно может определить само или иным способом получить новый участок маршрута, проходящий через место, где автономное транспортное средство 101 выявило снижение (920) степени надёжности. Например, если транспортное средство, управляемое человеком, перенаправляется, в то время как оно выполняет заказ, то новый маршрут для этого ведущего транспортного средства должен быть рассчитан так, чтобы он проходил через участок дороги, где должно быть обеспечено направление, а затем к месту оказания услуги или к месту разгрузки для текущего заказа.
[0121] Когда ведущее транспортное средство сопряжено с автономным транспортным средством 101, интерфейсная система 500 ведущего транспортного средства, управляемого человеком, может получать уведомление, информирующее водителя о присутствии автономного транспортного средства 101 (930). В некоторых вариантах водитель ведущего транспортного средства может также получать обратную связь для содействия отслеживанию или сопровождению, выполняемому автономным транспортным средством 101, или для облегчения этих процессов (932). Например, водитель может получить указание снизить скорость, определить местоположение и встать на боковой улице и/или выполнить другие действия, чтобы автономное транспортное средство 101 могло отследить ведущее транспортное средство на проблемном участке дороги. В некоторых вариантах ведущее транспортное средство также может получить команду использовать датчики и/или записывать информацию (в том числе устно или через работу камеры соответствующего мобильного компьютерного устройства) для того, чтобы получить информацию об участке дороги, который создал проблему для автономного транспортного средства 101 (934). Система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может обрабатывать информацию, предоставленную водителем, чтобы в дальнейшем надлежащим образом интерпретировать событие или состояние, которое вызвало снижение степени надёжности у автономного транспортного средства 101. В соответствии с различными примерами водитель и/или система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может (i) классифицировать событие или состояние, (ii) вручную определить полную стратегию действий автономного транспортного средства 101 для преодоления или обхода этого события или состояния и/или (iii) оценить длительность, размеры или другой атрибут данного события или состояния в динамике по времени. Когда направление автономного транспортного средства 101 завершена, водитель ведущего транспортного средства может получить уведомление о том, что отслеживание со стороны автономного транспортного средства 101 закончилось (936).
[0122] ФИГ. 10 показывает пример использования транспортного средства, управляемого человеком, для поддержки автономного транспортного средства на некотором участке дороги в соответствии с одним или более вариантами осуществления. В примере на фиг. 10 автономное транспортное средство 1020 имеет трудности с участком дороги, на котором временно устроен объезд скопления людей. Автономное транспортное средство 1020 имеет об этом участке дороги информацию, в соответствии с которой автономное транспортное средство 1020 может знать о светофоре, а также о том, что территория, прилегающая к дороге, является тротуаром. Хотя эта дорога может быть известна автономному транспортному средству 1020, в приведённом примере скопление людей на дороге создаёт событие или состояние, для которого у САТС 100 этого автономного транспортного средства 1020 снижается степень надёжности, порождая запрос 121 о событии в систему 200 поддержки направления со стороны транспортного средства, управляемого человеком. Система 200 поддержки направления со стороны транспортного средства, управляемого человеком, (например, показано как сервисное облако 1012) может выбрать водителя транспортного средства, управляемого человеком, и выдать ему команду для направления автономного транспортного средства 1020. Система 200 поддержки направления со стороны транспортного средства, управляемого человеком, может также передать команды 1010 по отслеживанию на автономное транспортное средство 1020. Автономное транспортное средство 1020 может прибыть на место встречи, и автономное транспортное средство 1020 может следовать за ведущим транспортным средством 1022, управляемым человеком, на участке 1005 дороги или отслеживать там это средство. Автономное транспортное средство 1020 может затем отслеживать транспортное средство 1022, управляемое человеком, на участке дороги 1005. Автономное транспортное средство 1020 при отслеживании ведущего транспортного средства 1022, управляемого человеком, может повернуть, сменить полосу движения и двигаться так, чтобы как избегать опасностей на дороге или состояний, выявляемых датчиками автономного транспортного средства 1020, так и удерживать положение на дороге и расположение, которое имеет ведущее транспортное средство 1022, управляемое человеком. Так, например, если автономное транспортное средство 1020 обнаруживает дорожное состояние, которое отсутствует у транспортного средства 1022, управляемого человеком, то автономное транспортное средство 1020 будет всё же пытаться следовать за транспортным средством 1022, управляемым человеком, по тому же пути, используя ту же полосу дороги и выполняя те же манёвры. В некоторых вариантах осуществления автономное транспортное средство 1020 выполняет действия, такие как изменение полосы движения, повороты и другие рулевые операции, в том же положении на дороге, что и транспортное средство 1022, управляемое человеком. Автономное транспортное средство 1020 также может изменять скорость по своему усмотрению, самостоятельно регулируя темп своего движения или действия, чтобы учитывать состояния или события, которые могут не влиять на транспортное средство 1022, управляемое человеком, таким же образом.
[0123] Дополнительно при отслеживании транспортного средства 1022, управляемого человеком, САТС 100 автономного транспортного средства 1020 может реализовать режим, в котором транспортное средство 1022, управляемое человеком, является приоритетным, тем самым позволяя САТС 100 игнорировать правила и информацию, на которые автономное транспортное средство 1020 в противном случае полагалось бы. Например, автономное транспортное средство 1020 может иметь информацию или знания о тротуаре, прилегающем к дороге, но в данном примере тротуар используется для формирования участка дороги 1005. Автономное транспортное средство 1020 следует за ведущим транспортным средством 1022, управляемым человеком, несмотря на осведомлённость и знание правил, которые требуют, чтобы это транспортное средство не заезжало на тротуары. Поскольку автономное транспортное средство 1020 работает в альтернативном ведомом режиме, оно может не соблюдать свои собственные правила вождения. Точно так же, несмотря на красный сигнал светофора, автономное транспортное средство 1020 едет на него, следуя за ведущим транспортным средством 1022, управляемым человеком. В то время как САТС 100 автономного транспортного средства 1020 обнаруживает событие "красный сигнал светофора", режим работы предусматривает, что автономное транспортное средство следует за ведущим транспортным средством 1022, управляемым человеком, не соблюдая свои собственные правила вождения.
[0124] ФИГ. 11А-11C показывают примеры интерфейсов для отдачи команд ведения транспортному средству человеком-оператором при направлении автономного транспортного средства. В приведённых примерах водитель транспортного средства, обеспечивающий направление для автоматизированного транспортного средства 101, может получать сообщения, информирующие водителя о статусе, о выполнении команд, а также получать рекомендации-подсказки, в то время как водитель осуществляет направление. Дисплейное окно 1102 может быть предусмотрено на мобильном компьютерном устройстве водителя, которое также может соответствовать интерфейсной системе 500 транспортного средства, управляемого человеком, или быть её частью, как, например, показано в примере на фиг. 5.
[0125] На фиг. 11 А дисплейное окно 1102 у водителя отображает команды от сетевого сервиса, который предлагает водителю выступить в качестве ведущего транспортного средства для некоторого автономного транспортного средства. Дисплейное окно 1102 показывает сообщение 1103, информирующее водителя о выборе его в качестве ведущего для автономного транспортного средства 101. Сообщение 1103 может быть показано также вместе с картой, идентифицирующей место 1109 встречи, где водитель должен взять управление автономным транспортным средством 101. Водителю может быть показан маршрут 1111, содержащий, например, путь к месту встречи и/или путь через участок дороги, который автономное транспортное средство 101 не может пройти. Сообщение 1103 может опционально включать в себя или задавать действие, которое требуется от водителя, чтобы автономное транспортное средство 1101 могло начать отслеживать транспортное средство этого водителя. Например, водителю может быть поручено припарковаться и ждать прибытия автономного транспортного средства или просто проехать около того места, где припарковано автономное транспортное средство.
[0126] На фиг. 11В дисплейное окно 1102 показывает статус после того, как водитель прибыл на место встречи. Соответственно, дисплейное окно 1102 может включать в себя сообщение 1115 о статусе и/или индикатор 1116, который информирует водителя о том, что автономное транспортное средство 101 отслеживает транспортное средство водителя. В то время как автономное транспортное средство 101 отслеживает, дисплейное окно 1102 может отображать также сообщения 1112 обратной связи, относящиеся к направлению, или команды для водителя, относящиеся к движению. Например, сообщение 1112 обратной связи может быть реакцией на измеренное расстояние между автономным транспортным средством 101 и транспортным средством водителя, и если автономное транспортное средство начинает отставать от транспортного средства водителя, то водителю может быть дана команда на замедление. В качестве другого примера водителю может быть дана команда остановиться или съехать на обочину дороги и там встать, чтобы позволить автономному транспортному средству догнать ведущее транспортное средство.
[0127] На фиг. 11C дисплейное окно 1102 показывает статус после того, как автономное транспортное средство 101 остановилось, следуя за транспортным средством водителя. Например, водитель может получить маршрут для проезда, после того как автономное транспортное средство начинает отслеживание, но водитель может не получать какой-либо независимой информации о том, когда и где автономное транспортное средство 101 прекращает отслеживание. Уведомление 1125 водителя в дисплейном окне может подтвердить, что автономное транспортное средство 101 прекратило отслеживание. Водитель может продолжить маршрут к месту оказания услуги после того, как автономное транспортное средство прекращает отслеживание.
[0128] ФИГ. 11C также иллюстрирует вариант, в котором водитель ведущего транспортного средства используется для получения в реальном времени информации о событии или состоянии, в связи с которым автономное транспортное средство 101 запросило поддержку. Например, водителю может быть предложено дать голосом или текстом информацию, содержащую некоторое обозначение или краткое описание того, что воспринял водитель.
[0129] В вариантах данное транспортное средство водителя выбрано из-за наличия встроенного набора датчиков, которые водитель может выборочно вводить в действие или использовать непрерывно. Водителю может быть предложено ввести в действие датчики при движении через участок дороги, который вызвал снижение значения степени надёжности на автономном транспортном средстве 101. После того как автономное транспортное средство 101 отсоединено, водителю может быть также предложено выполнить другие действия, такие как, например, выполнить восходящую загрузку данных, полученных от датчиков, или убрать развёрнутые датчики до следующего уведомления.
[0130] В соответствии с некоторыми примерами данные, полученные с транспортного средства, управляемого человеком, могут включать в себя информацию от датчиков и/или дополнительные сведения от человека-водителя. Например, система 20 поддержки направления со стороны транспортного средства, управляемого человеком, или иной удалённый сервис может обрабатывать и анализировать данные от транспортного средства, управляемого человеком. В одном варианте осуществления эти данные могут быть проанализированы так, что событие или состояние будет классифицировано. Например, классификация может классифицировать событие или состояние как такое, которое другие автономные транспортные средства должны избегать, или альтернативно, как такое, которое другие автономные транспортные средства могут преодолеть, но только со значительной поддержкой командами или с дистанционным направлением. Как дополнение или альтернатива эти данные могут быть проанализированы, чтобы определить один или несколько атрибутов события или состояния, такие как предполагаемое время или продолжительность, в течение которого событие или состояние присутствует на дороге. Различные другие состояния или события, которые могут повлиять, например, на эффективность действия или на исправность автономного транспортного средства 101 также могут быть обнаружены и записаны с использованием данных от датчиков. Например, с помощью данных от датчиков могут быть получены изображения недавно обнаруженных опасных мест на дороге, таких как, например, выбоины, или такие места могут быть как-то иначе зарегистрированы, и эти сведения могут быть переданы в удалённый сервис. В свою очередь, данные от датчиков и/или результаты их анализа могут быть переданы в парк транспортных средств, в состав которого входят также автономные транспортные средства. Эти сведения могут дать автономным транспортным средствам предварительную информацию о событиях или состояниях, которые могут повлиять на способность автономного транспортного средства перемещаться в требуемом направлении, а также о потенциальные опасностях, которые могут, например, повредить автономное транспортное средство 101. Например, эта информация может быть передана другим автономным транспортным средствам как специфическая для региона информация от источника 217 (например, см. фиг. 2).
МЕТОДИКА И ПРИМЕРЫ ДЛЯ ВЫБОРА ТИПА ТРАНСПОРТНОГО СРЕДСТВА В СЕРВИСАХ ПРЕДОСТАВЛЕНИЯ ТРАНСПОРТИРОВКИ
[0131] ФИГ. 12 показывает пример способа рационального выбора типа транспортного средства для предоставления транспортной услуги. Пример способа, такой как описан в соответствии с фиг. 12, может быть реализован с использованием, например, системы, показанной в примере на фиг. 1 и фиг. 3. Дополнительно аппаратные компоненты и функциональные возможности для реализации аспектов сетевого сервиса для организации транспортных услуг могут быть реализованы с использованием компьютерной системы, такой как, например, на фиг. 6. При описании примера на фиг. 12 может быть сделана ссылка на элементы фиг. 1, 3 и 6, чтобы проиллюстрировать подходящие компоненты и функциональные возможности для осуществления или выполнения описанных операций.
[0132] В соответствии с фиг. 12 запрос на транспортировку поступает от пользователя (1210). Запрос на транспортировку может не содержать какого-то специфического требования к типу транспортного средства, если только не указано предпочтение пользователя. Как показано в примере на фиг. 12, предпочтение пользователя может быть опционально введено в выбор типа транспортного средства. Как дополнение или вариант выбор типа транспортного средства (например, автономное транспортное средство) может быть основан частично на логистике и/или на прогнозном анализе затрат на выбор какого-то типа транспортного средства по сравнению с другим. Далее в некоторых вариантах предпочтение пользователя может быть выражено в запросе на транспортировку или через настройку. Однако, как дополнительно описано в вариантах, сервис 10 предоставления транспортировки может рекомендовать пользователю другой тип транспортного средства, если прогнозный анализ затрат и/или логистика показывают предпочтительность другого типа транспортного средства.
[0133] Запрос на транспортировку может содержать информацию о месте оказания услуги, такую как место загрузки или высадки пользователя. Как было описано с некоторыми другими примерами, клиент может использовать приложение, работающее на мобильном компьютерном устройстве, чтобы сделать запрос на транспортировку в сервис 10 предоставления транспортировки. Запрос на транспортировку может содержать, например, текущее местоположение клиента или "GPS-pin-drop"-место, как место оказания услуги.
[0134] В ответ на получение запроса на транспортировку сервис 10 предоставления транспортировки выбирает тип транспортного средства и само транспортное средство, чтобы выполнить запрос на транспортировку (1220). В соответствии с некоторыми примерами при выборе транспортного средства и его типа автомобиля сервис 10 предоставления транспортировки определяет предварительный маршрут или место назначения для пользователя (1222). В другом примере сервис 10 предоставления транспортировки может выбрать тип транспортного средства на основе указанного пользователем предпочтения, истории пользователя и/или сообщения обратной связи и/или характеристик пользователя, таких как его возраст, место проживания и т.д. (например, молодые пользователи имеют склонность пользоваться новыми технологическими достижениями по сравнению с более старыми пользователями, которые предпочитают ощущение безопасности, порождаемое у них транспортным средством, управляемым человеком).
[0135] В одном варианте осуществления точки назначения и/или маршрут затем рассматриваются совместно с географической картой региона (как это предусмотрено картографическим сервисом 199, фиг. 2) или со специфической для региона информацией для того, чтобы определить, может ли выбор некоторого автономного транспортного средства 101 привести к статистически значимой или возможной вероятности необходимости отклонения от маршрута или места назначения. Отклонение может возникнуть, если автономное транспортное средство 101 посчитает, что оно встретилось с состоянием, событием или объектом, с которым оно не может справиться самостоятельно, и в этом случае автономному транспортному средству 101, возможно, понадобится направление к месту встречи. В соответствии с фиг. 3 база 330 сравнения маршрутизации может, например, спрогнозировать маршрут автономного транспортного средства 101 и далее оценить вероятность, потребуется ли ведущее транспортное средство, управляемое человеком. Статистическое определение может быть основано, например, на том, как часто в прошлом автономные транспортные средства 101 требовали отклонения в зависимости от (i) региона места разгрузки и/или точек на спрогнозированном маршруте выполненной транспортировки или (ii) состояния или события, которое, вероятно, имеет место на пути выполнения запроса на транспортировку. Прогноз, потребует ли автономное транспортное средство отклонения маршрута, может быть сделан также на основе других вероятностных определений, включая анализ дорожных состояний или событий (без исторического анализа), и/или моделирования, базирующегося на эффективности транспортного средства и/или на возникающих состояниях или событиях.
[0136] В другом варианте могут быть проверены места оказания услуги (или места разгрузки), а также маршруты по оптимальному маршруту, чтобы обеспечить возможность прохождения автономного транспортного средства 101 через соответствующий участок дороги (1230). Например, если место назначения находится вблизи строительства или зоны с большим количеством пешеходов, то может быть сделан вывод, что точки данного маршрута или данное место назначения являются недоступными для рассматриваемого автономного транспортного средства 101.
[0137] Как дополнение или альтернатива, может быть выполнен анализ затрат, чтобы сравнить расчётное время прибытия (в место назначения) или - альтернативно - время поездки для каждого из типов транспортных средств, включая тип автономных транспортных средств (1232). Даже когда какое-либо отклонение для автономного транспортного средства не ожидается, время поездки и/или расчётное время прибытия может у автономного транспортного средства отличаться от такового у транспортного средства, управляемого человеком. Например, из-за осторожного характера движения автономных транспортных средств статистическая или историческая информация могут указывать на то, что таким транспортным средствам требуется больше времени, чем транспортным средствам, управляемым человеком. Если планируемая или запрошенная поездка довольно большая по расстоянию, то разница в продолжительности поездки или PB может привести к значительной разнице в стоимости, что может склонить к выбору транспортного средства, управляемого человеком. Дополнительно, если отклонение от оптимального или желаемого маршрута (или места оказания услуги), как можно ожидать, произойдёт с довольно большой вероятностью, то продолжительность поездки или PB определяется для автономного транспортного средства с отклонением, включаемым в этот расчёт.
[0138] Расчёт тарифа может быть также учтён при выборе типа транспортного средства. Например, сервис 10 предоставления транспортировки может быть реализован так, чтобы автоматически выбирать более дешёвый тип транспортного средства для клиента, если клиент не выразил иное предпочтение. Таким образом, если клиент не выразил предпочтение, но был предложен более дорогой из двух транспортов, то это решение о выборе транспортного средства не будет поддержано по коммерческим причинам. Тариф на транспортировку для каждого типа транспортного средства может быть оценён с использованием, например, компонентов 340 маршрутизации, которые могут определить тариф для каждого типа транспортного средства и далее сравнить типы тарифа. Тип тарифа для двух типов транспортного средства может отличаться друг от друга из-за, например, спроса и предложения каждого типа транспортного средства. Другие факторы, которые могут повлиять на определение затрат, включают в себя время поездки. Если автономное транспортное средство 101 требует, например, отклонения от маршрута и/или направления от транспортного средства, управляемого человеком, то время (и стоимость) для данного типа транспортного средства может несоразмерно возрасти по сравнению с транспортным средством, управляемым человеком. Кроме того, отклонение маршрута может увеличить длину поездки, что может ещё больше увеличить стоимость. Денежная стоимость используется, таким образом, для сравнения различных типов транспортных средств, чтобы выбрать какой-то тип транспортного средства или проставить весовые коэффициенты для сравнения этих типов.
[0139] Другой параметр для облегчения выбора типа транспортного средства включает в себя предпочтения клиента применительно к типу транспортного средства (1234). Как дополнение или альтернатива предпочтение клиента может быть в форме продолжительности поездки или предполагаемого времени прибытия, что напрямую влияет на тип транспортного средства.
[0140] В некоторых вариантах осуществления предпочтение клиента определяет окончательный выбор. В одном из вариантов предпочтение клиента может быть отклонено на основании других соображений, таких как продолжительность поездки или PB или общая стоимость. Например, может быть реализованы коммерческие правила или соображения так, что (i), если клиент не имеет предпочтения к типу транспортного средства, то происходит выбор того типа транспортного средства, которое обеспечивает самую низкую денежную стоимость для клиента, но если (ii) клиент имеет предпочтение по продолжительности поездки или PB, то в этом случае выбор типа транспортного средства происходит на базе продолжительности поездки или PB. Далее, если клиент предпочитает один тип транспортного средства по сравнению с другим, то это предпочтение может быть преодолено, если его соблюдение увеличивает денежную стоимость или затраты времени (например, PB) больше, чем на некоторое пороговое значение (например, 25%).
МЕТОДИКА И ПРИМЕРЫ ИСПОЛЬЗОВАНИЯ АВТОНОМНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ УДАЛЁННОЙ ПОДДЕРЖКИ
[0141] ФИГ. 13 показывает пример способа работы автономного транспортного средства для получения поддержки от удалённого человека-оператора. ФИГ. 14 показывает пример способа работы удалённого сервиса, облегчающего навигацию автономного транспортного средства при неизвестном событии или состоянии на дороге. Пример способа, такой как описан в соответствии с фиг. 13, может быть реализован с использованием, например, автономного транспортного средства 101, показанного в примере на фиг. 1 и фиг. 4. Аналогично пример способа, такой как описан в соответствии с фиг. 14, может быть реализован с использованием, например, системы, показанной в примере на фиг. 4. Дополнительно аппаратные компоненты и функциональные возможности для реализации аспектов сетевого сервиса могут быть реализованы с использованием компьютерной системы, такой как показанная в примере на фиг. 6. При описании примера на фиг. 13 или фиг. 14 может быть сделана ссылка на элементы фиг. 1, 4 или 6, чтобы проиллюстрировать подходящие компоненты и функциональные возможности для осуществления или выполнения описанных операций.
[0142] В соответствии с примером на фиг. 13 автономное транспортное средство 101 может обрабатывать информацию от датчиков, которую оно получает во время поездки, для того, чтобы интерпретировать какое-то событие или состояние, информация (1310) о котором требуется автономному транспортному средству 101 или запрошена им. В одном аспекте рассматриваемое событие или состояние влияет на определение транспортным средством степени надёжности в своей безопасности (1312). В вариантах событие или состояние может быть таким, которое автономное транспортное средство 101 может обработать безопасно, но САТС 100 не может определиться с оптимальным действием или с тем, как лучше обрабатывать это событие в будущем.
[0143] САТС 100 может содержать заранее заданное значение порогового уровня в отношении степени надёжности или определённости при оценке состояний или событий (1320). Когда автономное транспортное средство 101 обнаруживает некоторый объект или некоторое событие или состояние, который или которое (на базе порога степени надёжности) не соответствует заданному порогу, то автономное транспортное средство 101 посылает предупреждение, запрашивая поддержку у удалённого источника (1322). В некоторых реализациях это предупреждение может быть выдано как реакция автономного транспортного средства 101 на выявленный им уровень неопределённости, превышающий пороговое значение (или, наоборот, на значение степени надёжности меньше порогового значения), в сравнении с автономным транспортным средством, надлежащим образом интерпретирующим, как безопасно реагировать на некоторое событие или состояние. Например, это предупреждение может быть выдано как реакция автономного транспортного средства на его неспособность (с достаточной уверенностью) распознать некоторый объект на дороге. В примерах, таких как показано на фиг. 4, этот запрос может быть отправлен на какой-то сервис, чтобы получить ввод от человека-оператора.
[0144] К запросу может быть присоединена или иным образом добавлена информация от датчиков, чтобы позволить человеку-оператору видеть то, что происходит на дороге у автономного транспортного средства 101 (1330). Например, изображения с одной или нескольких камер автономного транспортного средства 101 могут быть использованы для передачи информации на удалённый сервис. Информация от датчиков, передаваемая на удалённый источник, может быть отобрана, отфильтрована и/или упорядочена по приоритету для обеспечения её применимости к объекту, событию или состоянию, влияющему на степень надёжности транспортного средства (1340). Например, если камера дальнего действия на автономном транспортном средстве 101 обнаруживает объект на дороге, который это средство не может распознать, то данные от датчиков, передаваемые на источник, содержат изображения с камеры, первой обнаружившей этот объект, а также изображения от других камер или датчиков, которые могли затем также увидеть этот объект.
[0145] Пример на фиг. 13 предусматривает, что время, отведённое от удалённого сервиса для выдачи ответа, составляет, как правило, несколько секунд (например, менее 8 секунд) и менее 3 секунд. Соответственно, в рамках одной реализации САТС 100 определяет, получен ли ответ от удалённого сервиса до истечения заданного порогового значения времени (1345). Этот порог времени может быть предварительно задан статическим или динамическим. Например, пороговое ограничение по времени для получения ответного действия может быть статическим и задано по умолчанию, в зависимости от географического региона и/или дороги. Альтернативно пороговое ограничение по времени для получения ответного действия может быть динамическим, и его можно задавать с помощью одного или нескольких параметров, изменяемых в процессе движения. Например, пороговое ограничение по времени может быть установлено в зависимости от скорости автономного транспортного средства 101 и/или масштабности объекта, события или состояния, который или которое является источником предупреждения.
[0146] Если определено (1345), что ответ от удалённого сервиса (например, HARVAS) получен, то САТС 100 автономного транспортного средства 101 может действовать в соответствии с ответом, полученным от этого удалённого сервиса (1350). В одном из вариантов осуществления данный ответ может указать некоторое действие или прекращение некоторого действия, которое автономное транспортное средство 101 должно выполнить (1352), например, немедленное снижение скорости, перестроение или выезд на обочину дороги и останов. В некотором варианте ответ, полученный от удалённого человека-оператора, может задать (или изменить) стратегию реагирования для автономного транспортного средства 101 (1354). Эта стратегия реагирования может быть реализована как, например, условная и/или многоступенчатая команда. Например, стратегия реагирования может задать, что автономное транспортное средство 101 должно выполнять некоторое действие, (i) когда обнаружено некоторое конкретное состояние или (ii) до тех пор, пока некоторое конкретное состояние присутствует или является "истинным". Например, стратегия реагирования может идентифицировать одно или несколько действий "как безопасные/соответствующие стратегии для соблюдения" (например, "двигаться в левой полосе, когда обнаружено безопасное состояние прохождения"). Более того, в некоторых вариантах указанное действие передаётся как идентификатор к заранее определённому списку действий или опций стратегии для автономного транспортного средства 101. Указанное действие может быть передано также в виде списка действий (например, с помощью идентификатора), например, когда человек-оператор имитирует управление вождением и поворачивает транспортное средство при одновременном снижении скорости. В каждом из примеров сообщение от удалённого сервиса идентифицирует одно или несколько (i) действий, (ii) наборов (или последовательностей действий) или (iii) стратегий реагирования для САТС 100 при выполнении одного или нескольких действий.
[0147] Если пороговый интервал времени прошёл и какое-либо ответное действие от удалённого сервиса не получено, то автономное транспортное средство 101 может инициировать выполнение действия по умолчанию (1362). Например, действием по умолчанию, когда объект на дороге не распознан, может быть умеренное торможение для снижения скорости. Однако для различных событий, состояний или объектов могут быть выполнены различные ответные действия. Например, действием по умолчанию, когда автономное транспортное средство 101 находится на автостраде, может быть умеренное торможение или перестроение (в зависимости от того, что является более подходящим), тогда как в городской среде действием по умолчанию может быть более агрессивное торможение с полным остановом.
[0148] В некоторых вариантах при инициировании выполнения действия по умолчанию определяют ещё, завершено ли действие, инициированное по умолчанию, и/или распознан ли неизвестный объект, неизвестное событие или состояние (1365). Если неизвестный объект, неизвестное событие или состояние всё ещё присутствует, то процесс повторяют для определения (1345) при определении, был ли получен ответ от удалённого сервиса. Например, ответ от удалённого сервиса может быть получен после завершения порогового ограничения по времени, но до того, как действие по умолчанию будет завершено. Например, автономное транспортное средство 101 может начать торможение и снижение скорости, а затем получить ответ от удалённого сервиса.
[0149] Как альтернатива или вариант, когда выполняется действие по умолчанию, может быть задана другая пороговая длительность по времени, прежде чем автономное транспортное средство 101 выполнит это действие снова (например, снова торможение и снижение скорости) или выполнит это действие более жёстко (например, торможение и останов). Определение (1355) может включать в себя определение того, требуется ли дальнейшее действие, а затем выполнение либо действия по умолчанию, либо действия, заданного удалённым сервисом.
[0150] В соответствии с фиг. 14 удалённый сервис отслеживает предупреждения от автономного транспортного средства 101 (1410). Когда некоторое предупреждение получено, удалённый сервис идентифицирует транспортное средство, которое является источником передачи, и затем передаёт предупреждение в компонент 434 интерфейса человека-оператора соответственно (1414). Человек-оператор может взаимодействовать с интерфейсом, и в одном варианте осуществления компонент 434 интерфейса человека-оператора назначен только одному транспортному средству (или некоторому ограниченному набору транспортных средств). Таким образом, предупреждение 413, например, поступает человеку-оператору, который имеет информацию или знания о передающем транспортном средстве и/или о конкретной поездке, осуществляемой этим транспортным средством (например, географический регион или дорога).
[0151] В соответствии с одним из вариантов осуществления полученные данные от автономного транспортного средства 101 представлены так, что содержат одну или несколько опций меню, из которых человек-оператор может сделать выбор (1420). Например, опция меню может предоставить варианты того, как автономное транспортное средство 101 должно прореагировать на объект на дороге (например, поворот влево/вправо, снижение скорости и объезд, игнорирование и т.д.). Данное представление может накладывать опции меню на контент, созданный на основе информации от датчиков (например, камера дальнего действия или видео). Представление, поступающее человеку-оператору, может содержать также функцию, разрешающую человеку-оператору запросить дополнительную информацию от автономного транспортного средства 101 (1422). Например, оператор может запросить другие изображения, изображения с разных камер или с камер, ориентированных иначе, или картографическую информацию для этого транспортного средства. Более того, в некоторых вариантах информация, представленная человеку-оператору, может содержать время, оставшееся человеку-оператору на выдачу ответа (до того, как будет предпринято действие по умолчанию) (1424).
[0152] Из такого представления человек-оператор делает выбор (например, из опций меню). Этот выбор поступает обратно в автономное транспортное средство 101, которое выдало предупреждение 413 (1430). Этот выбор может быть затем интерпретирован на автономном транспортном средстве 101, где он реализуется. Как упоминалось с другими примерами, при отсутствии выбора со стороны человека-оператора автономное транспортное средство 101 может выполнить действие по умолчанию, например, умеренное торможение. Среди других преимуществ некоторых примеров действие, заданное человеком-оператором, может устранить торможение автономного транспортного средства 101 или уменьшить количество и степень этих торможений так, чтобы улучшить ощущения пассажира при поездке.
[0153] ФИГ. 15 показывает пользовательский интерфейс, например, для удалённого сервиса, какой описан в примерах, показанных на фиг. 4 и фиг. 14. Пример интерфейса 1500 может, например, соответствовать компоненте 434 интерфейса человека-оператора, модифицированной программой меню предварительного ответа 450. Как показано, человек-оператор может получить одно или несколько изображений или контент 1502 изображения (например, видео, изображения кадров из видео и т.д.) со значками, представляющими элементы действий. В приведённом примере контент 1502 изображения отражает дорогу с нераспознанным объектом. Значки могут быть индивидуально выбраны для того, чтобы дать возможность человеку-оператору сделать ввод выбора для задания направления или скорости автономному транспортному средству. Ввод выбора оператора может быть ответом на восприятие человеком-оператором события или объекта, создавшего неопределённость для автономного транспортного средства.
[0154] Как дополнение или альтернатива интерфейс 1500 может включать в себя один или несколько механических элементов, которые позволяют человеку-оператору иметь различную степень управления ведением автономного транспортного средства 101. Так, например, механические элементы интерфейса 1500 могут включать в себя джойстик (или комбинацию джойстиков), колёса, рычаги или другие ручные средства управления, позволяющие, например, управлять направлением, скоростью, датчиками (например, управление направлением или углом обзора для камер) или другими движениями транспортного средства. Как дополнение или альтернатива механические элементы интерфейса 1500 могут включать в себя ножные элементы управления или педали, обеспечивающие оператору возможность, например, регулирования скорости и/или остановки транспортного средства.
[0155] ФИГ. 15 иллюстрирует некоторый вариант осуществления, в котором значки являются направленными, чтобы показать связанное с направлением действие, которое автономное транспортное средство 101 должно осуществить. В примере на фиг. 15 стрелки направления 1512, 1514, 1516 показывают, что автономное транспортное средство 101 должно повернуть влево или вправо или двигаться вперёд. Другая фигура 1518 может показывать, что автономное транспортное средство должно остановиться или затормозить, чтобы уменьшить скорость. Например, фигуру 1518 можно нажимать с перерывами или непрерывно, чтобы показать продолжительность и/или интенсивность торможения. Функция времени 1522 может показывать время, оставшееся до начала действия автономного транспортного средства 101 по умолчанию. Другая функция может быть охарактеризована как "никакого действия", так что выбор этой функции сигнализирует о том, что автономное транспортное средство 101 не должно как-либо менять направление или скорость из-за обнаруженного объекта. В вариантах значки могут быть использованы, чтобы запросить дополнительную информацию или выполнить альтернативные действия, которые могут отсутствовать в представлении меню.
[0156] Предполагается, что варианты осуществления, описанные в данном документе, распространяются на отдельные элементы и концепции, описанные здесь, независимо от других концепций, идей или системы, а также, что варианты осуществления включают в себя комбинации элементов, перечисленных в любом месте в данной заявке. Хотя варианты осуществления описаны здесь подробно в соответствии с прилагаемыми рисунками, следует понимать, что настоящее изобретение не ограничивается этими вариантами осуществления. По существу, многие модификации и варианты будут очевидны практикующим специалистам в данной области. Соответственно, предполагается, что объём изобретения определяется приведённой далее формулой изобретения и её эквивалентами. Кроме того, предполагается, что конкретный признак, описанный либо отдельно, либо как часть какого-то варианта осуществления, может быть объединён с другими отдельно описанными признаками или с частями других вариантов осуществления изобретения, даже если другие признаки и варианты осуществления не упоминают данный конкретный признак. Таким образом, отсутствие описания комбинаций не исключает предъявление изобретателем прав на такие комбинации.
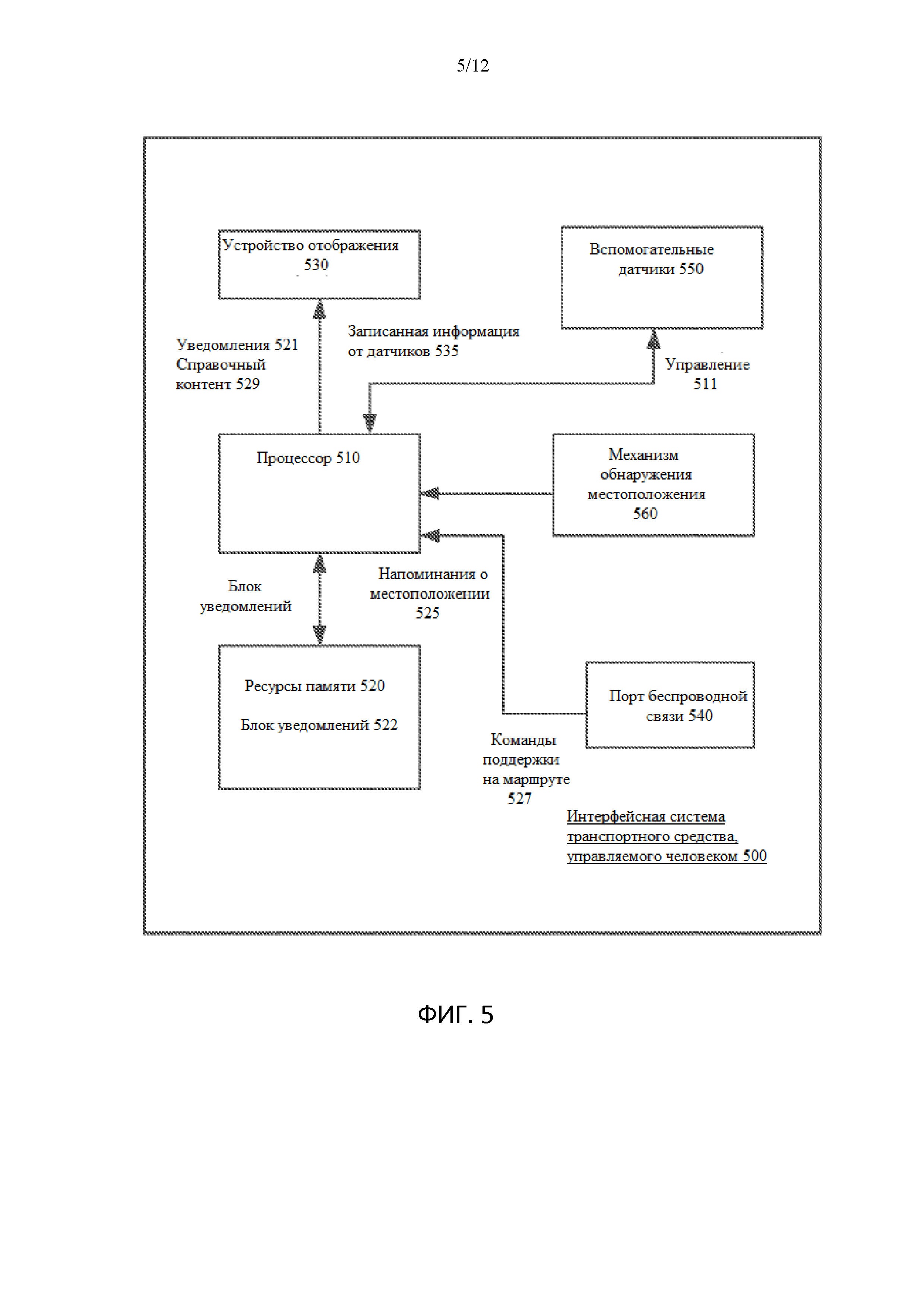
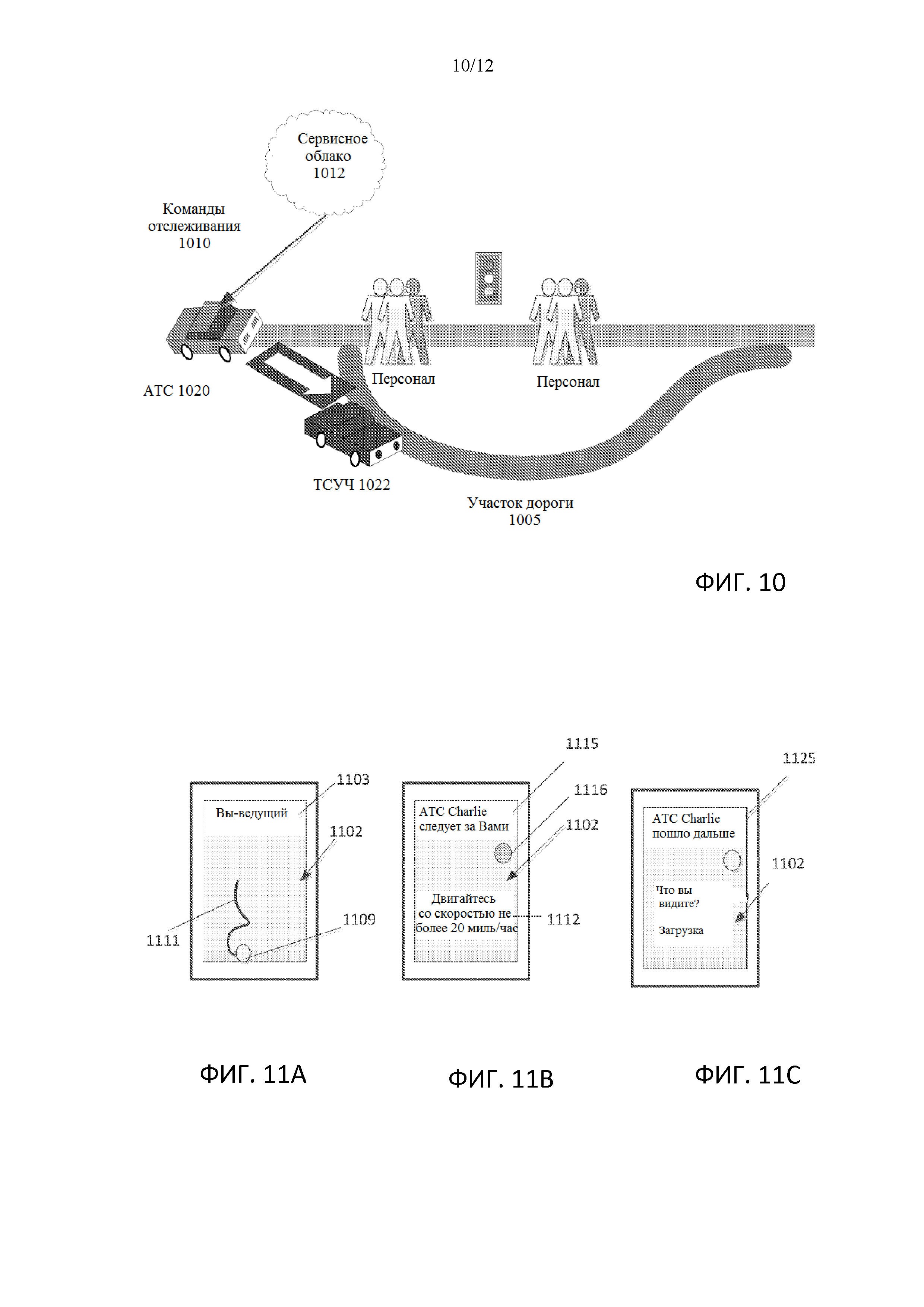
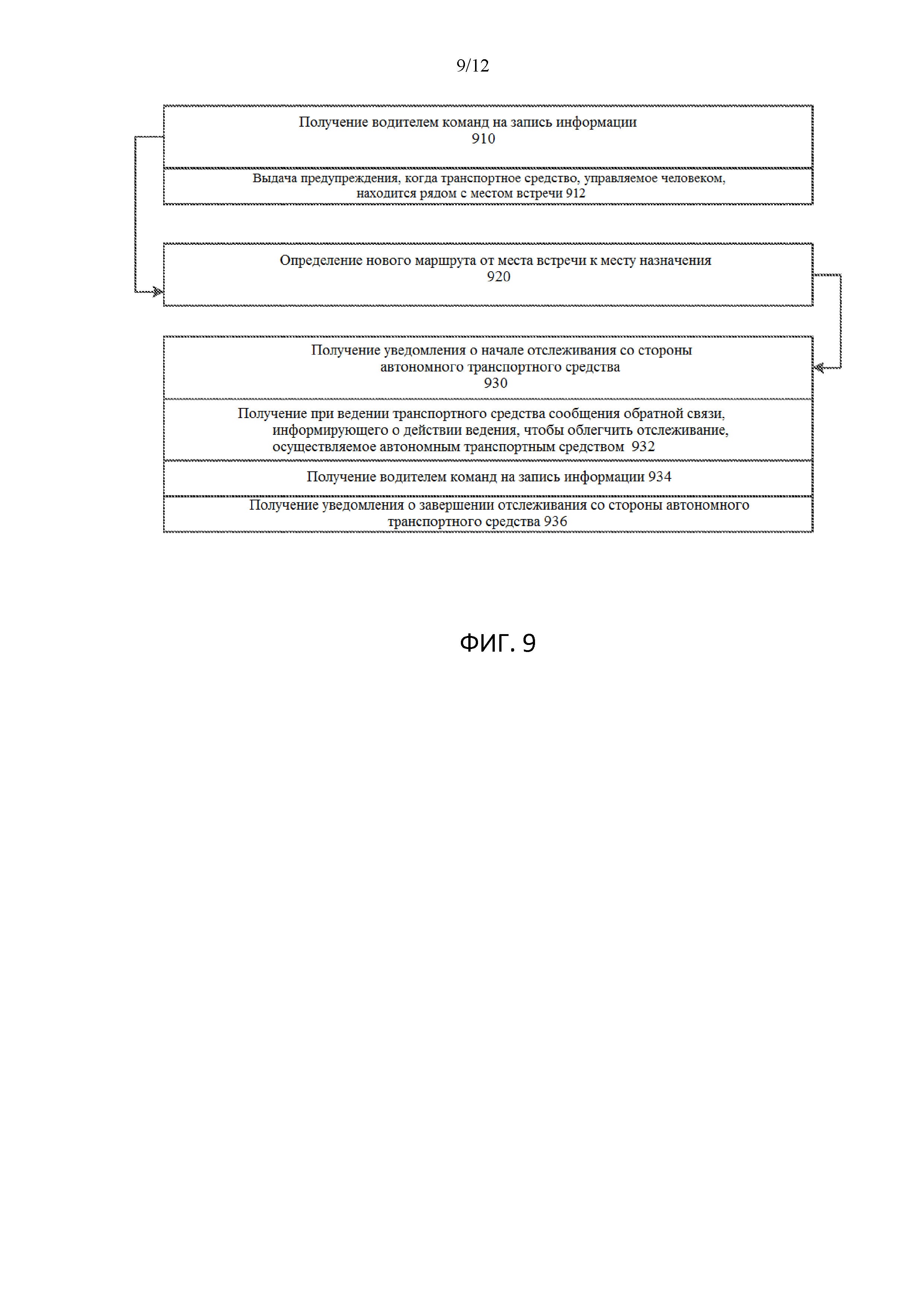
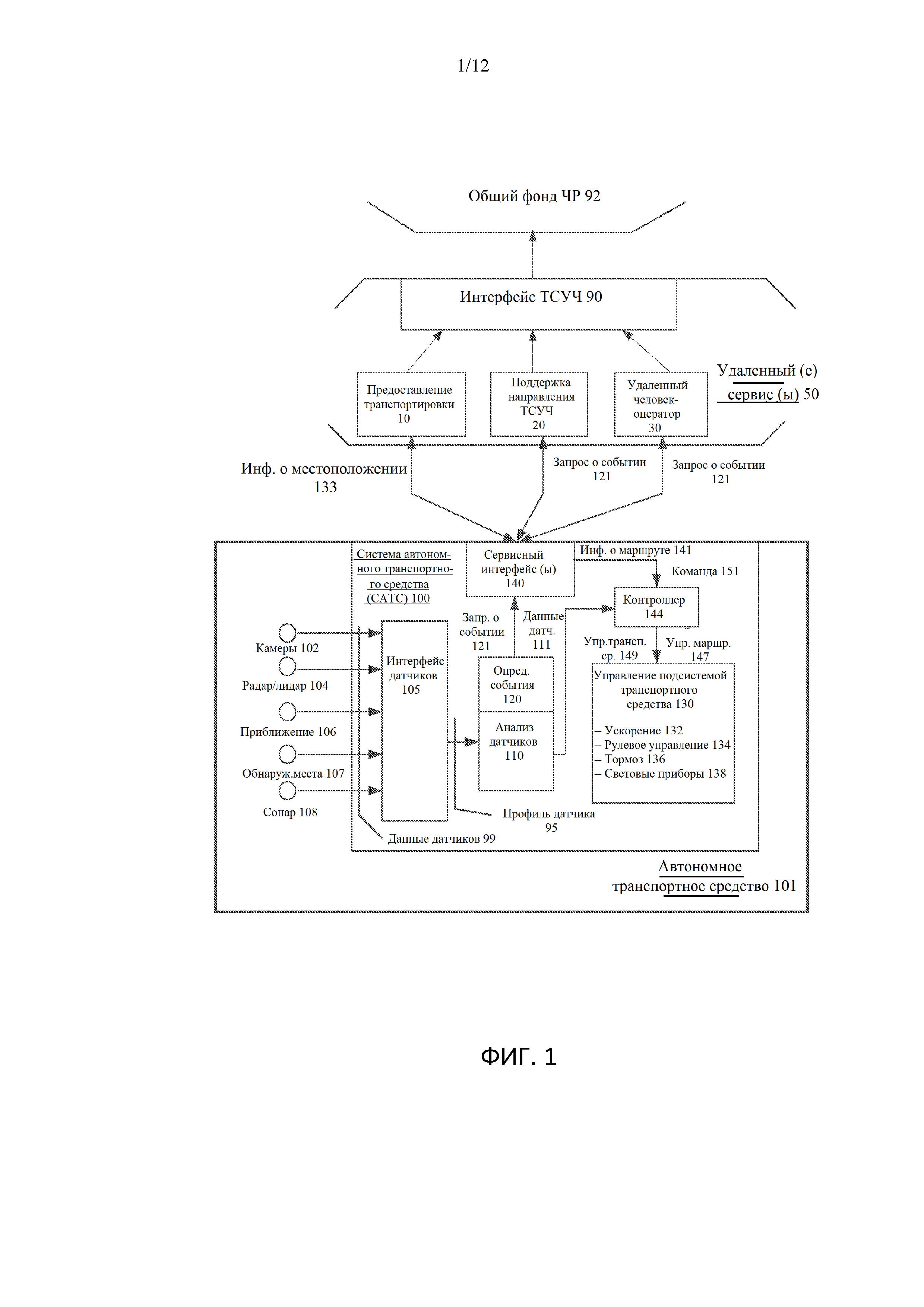
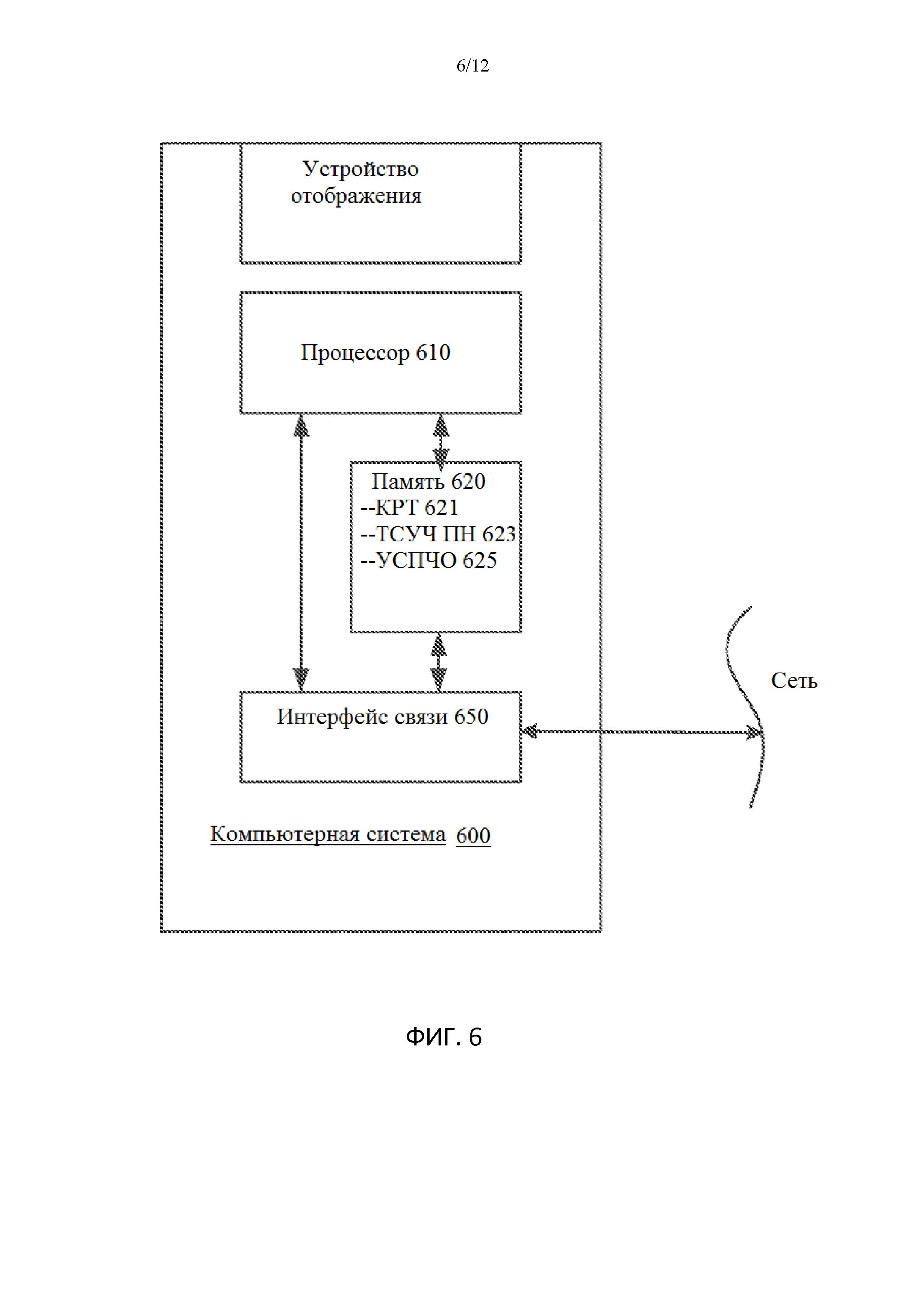
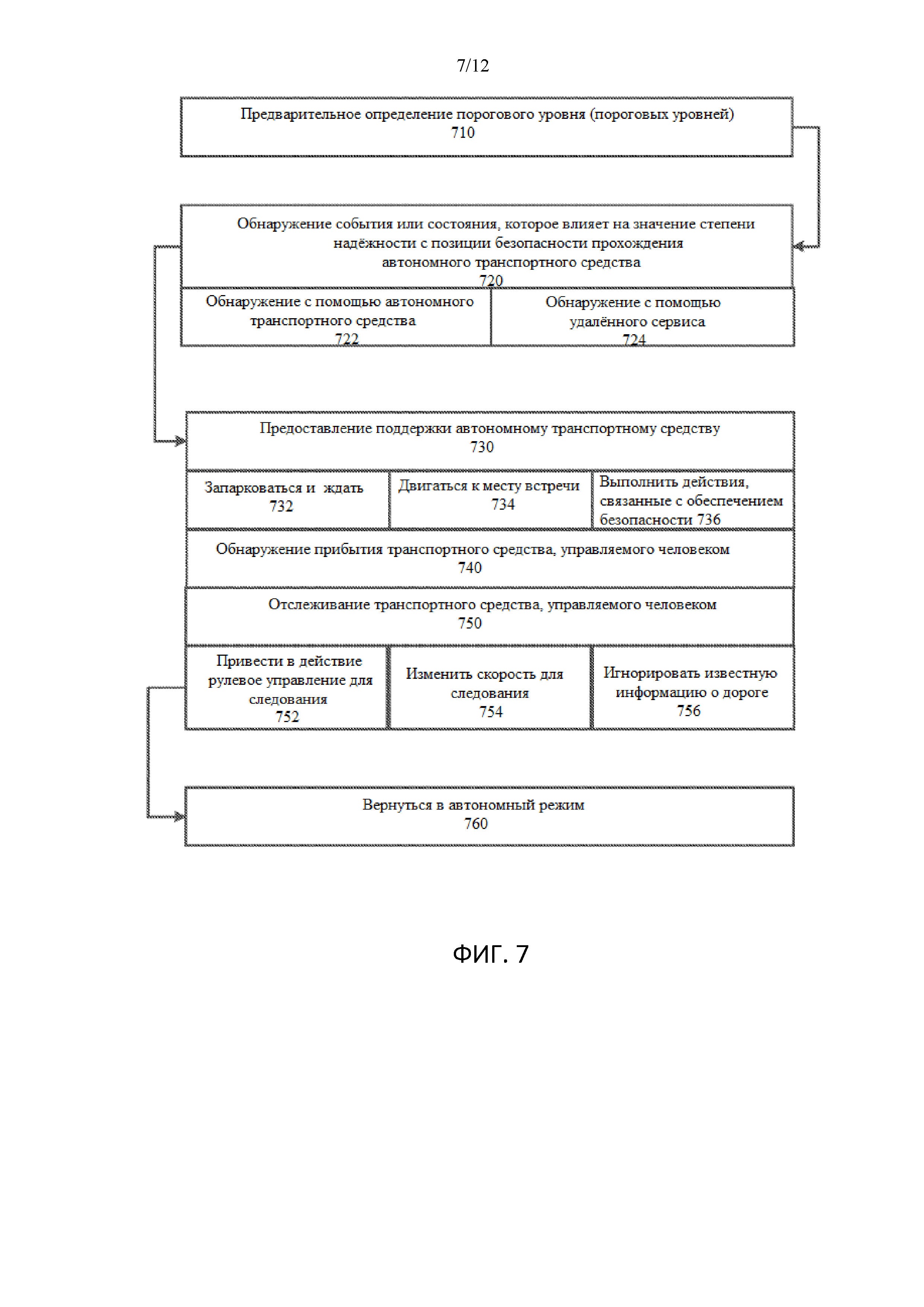
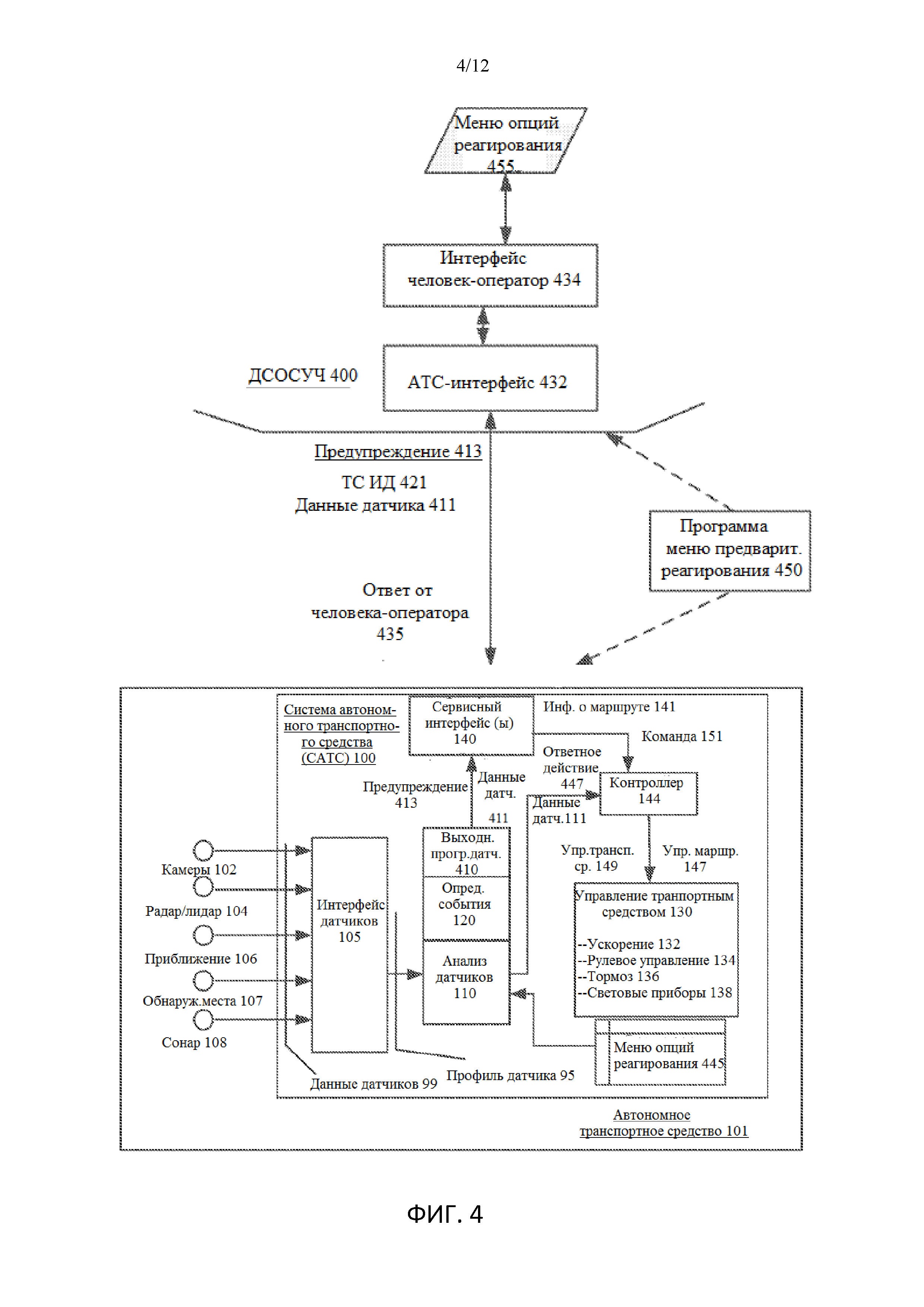
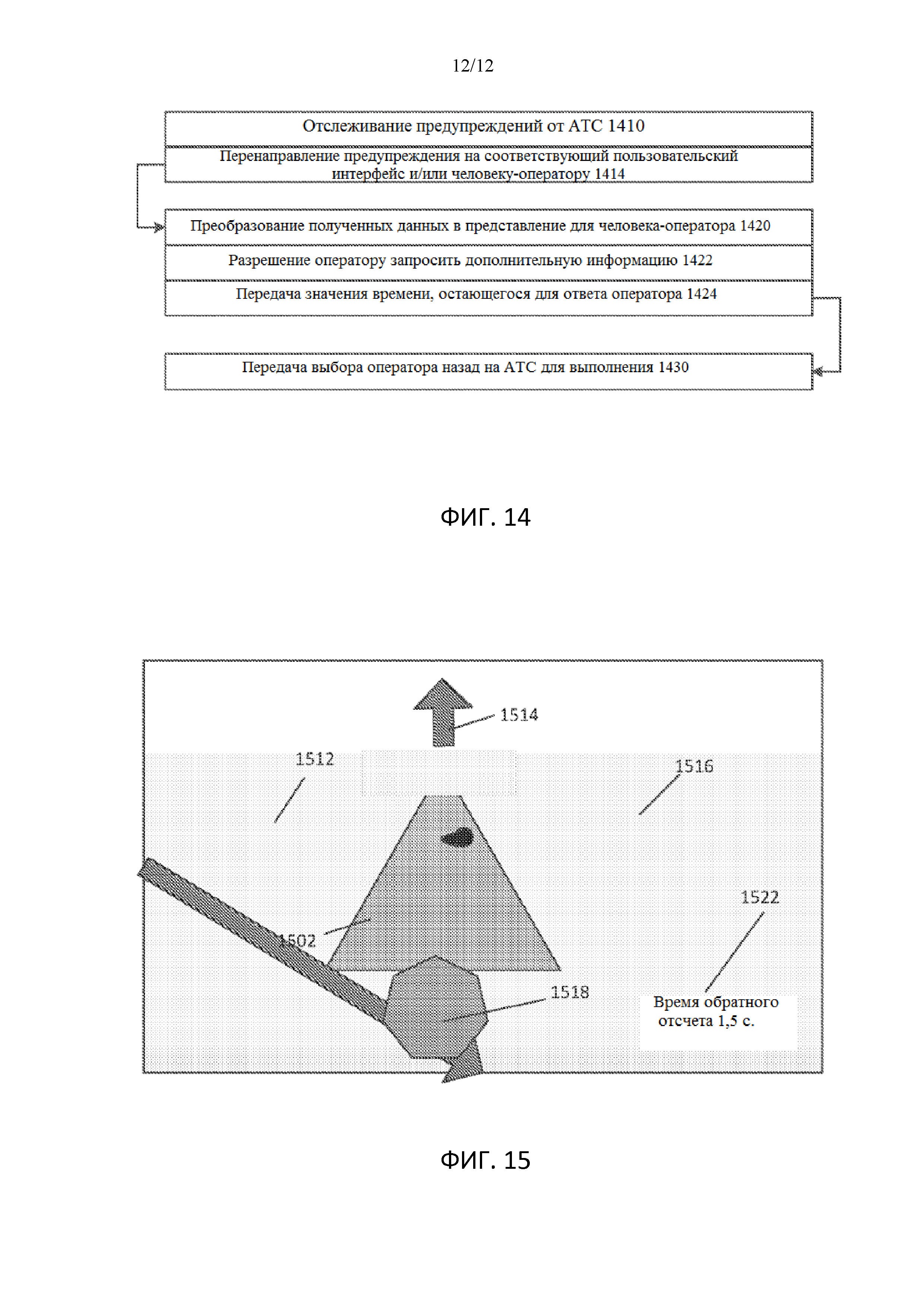
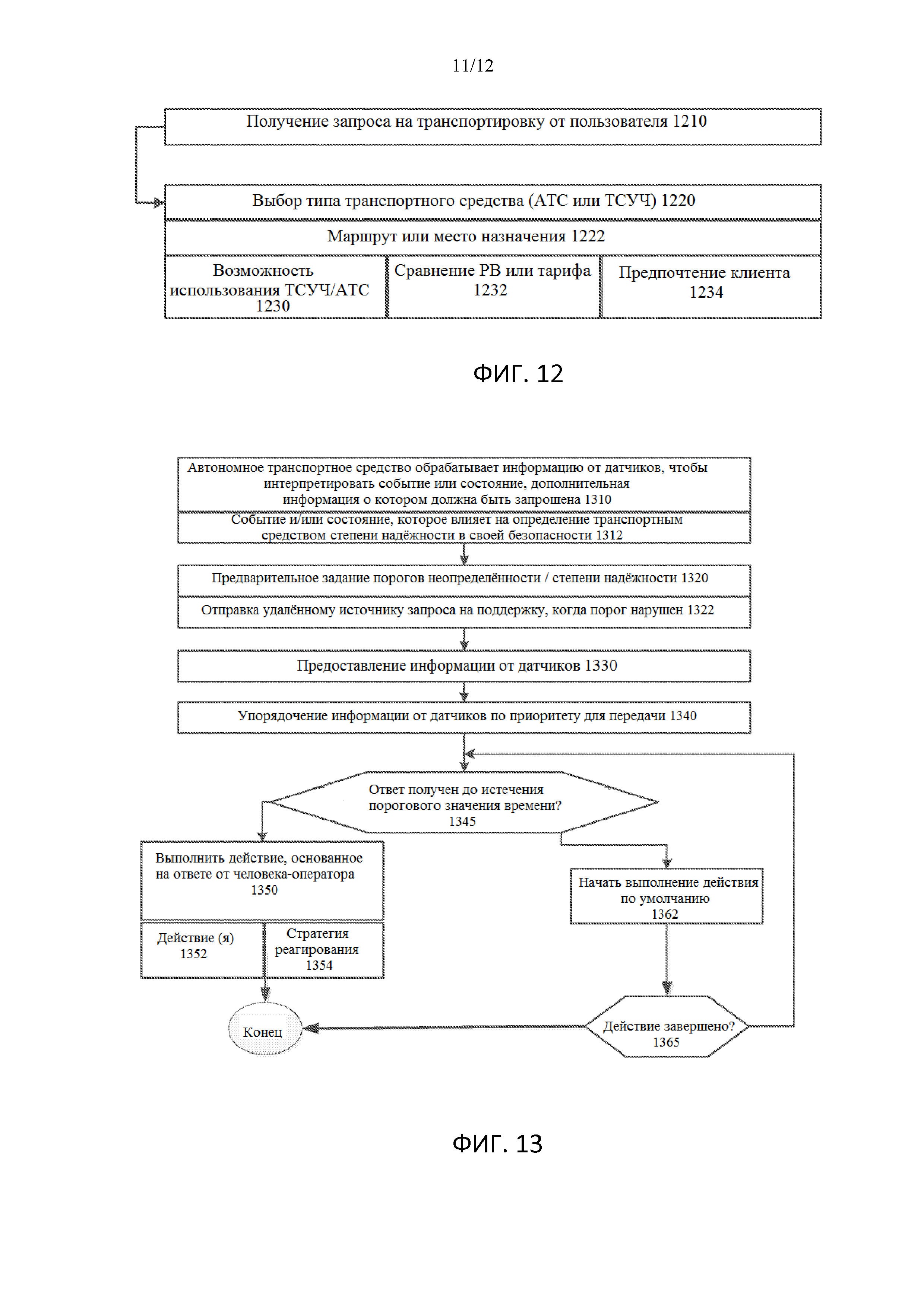
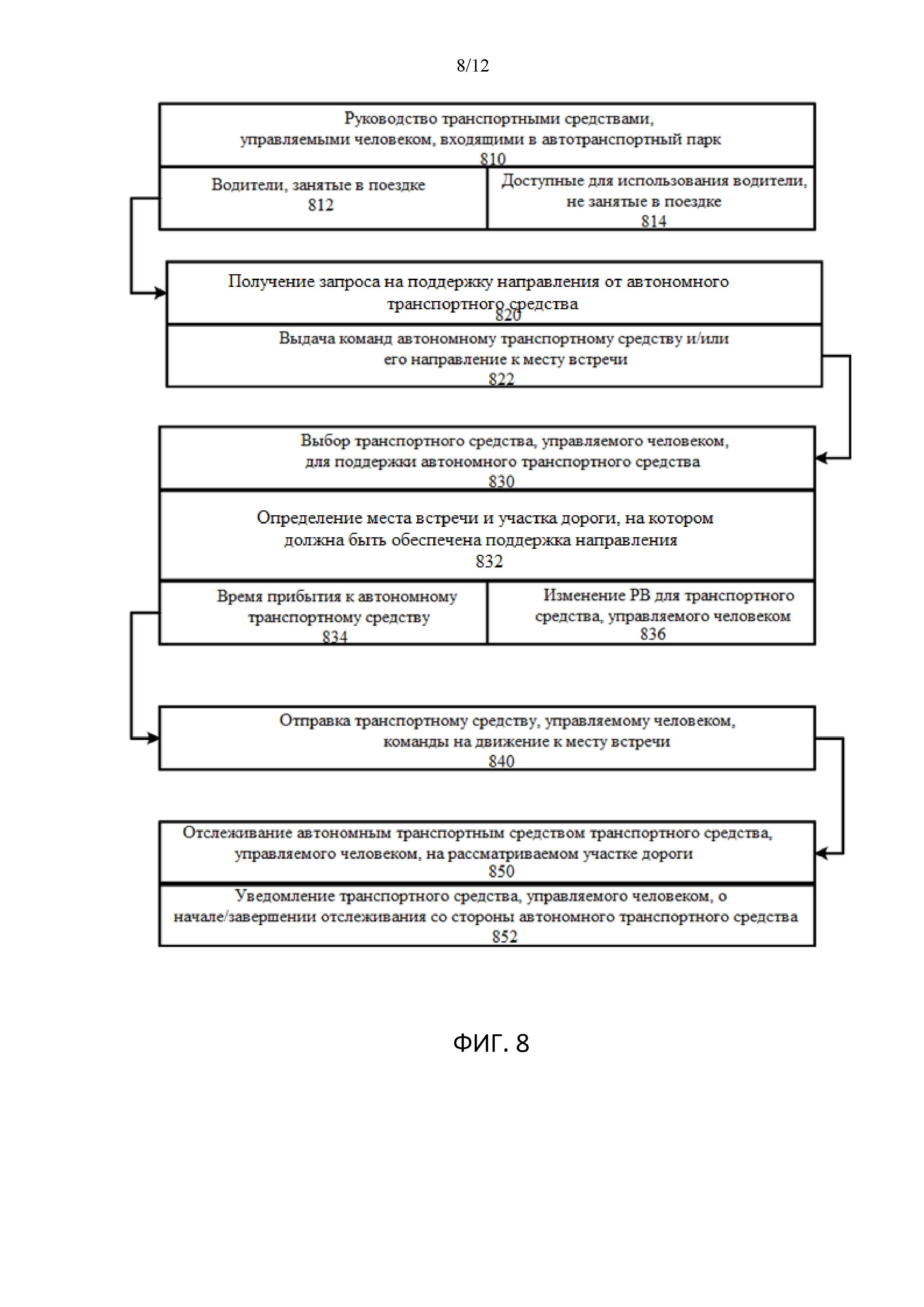
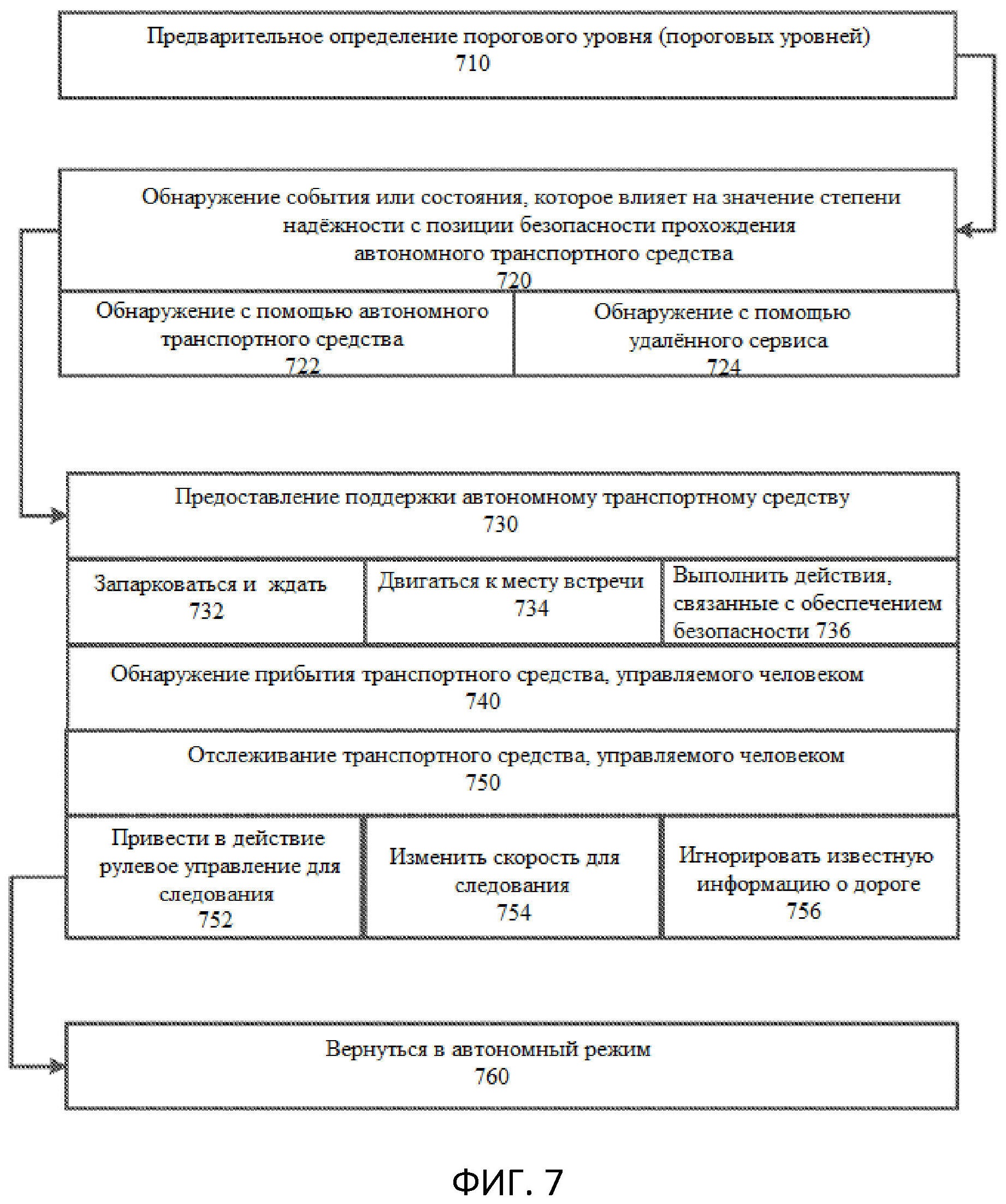
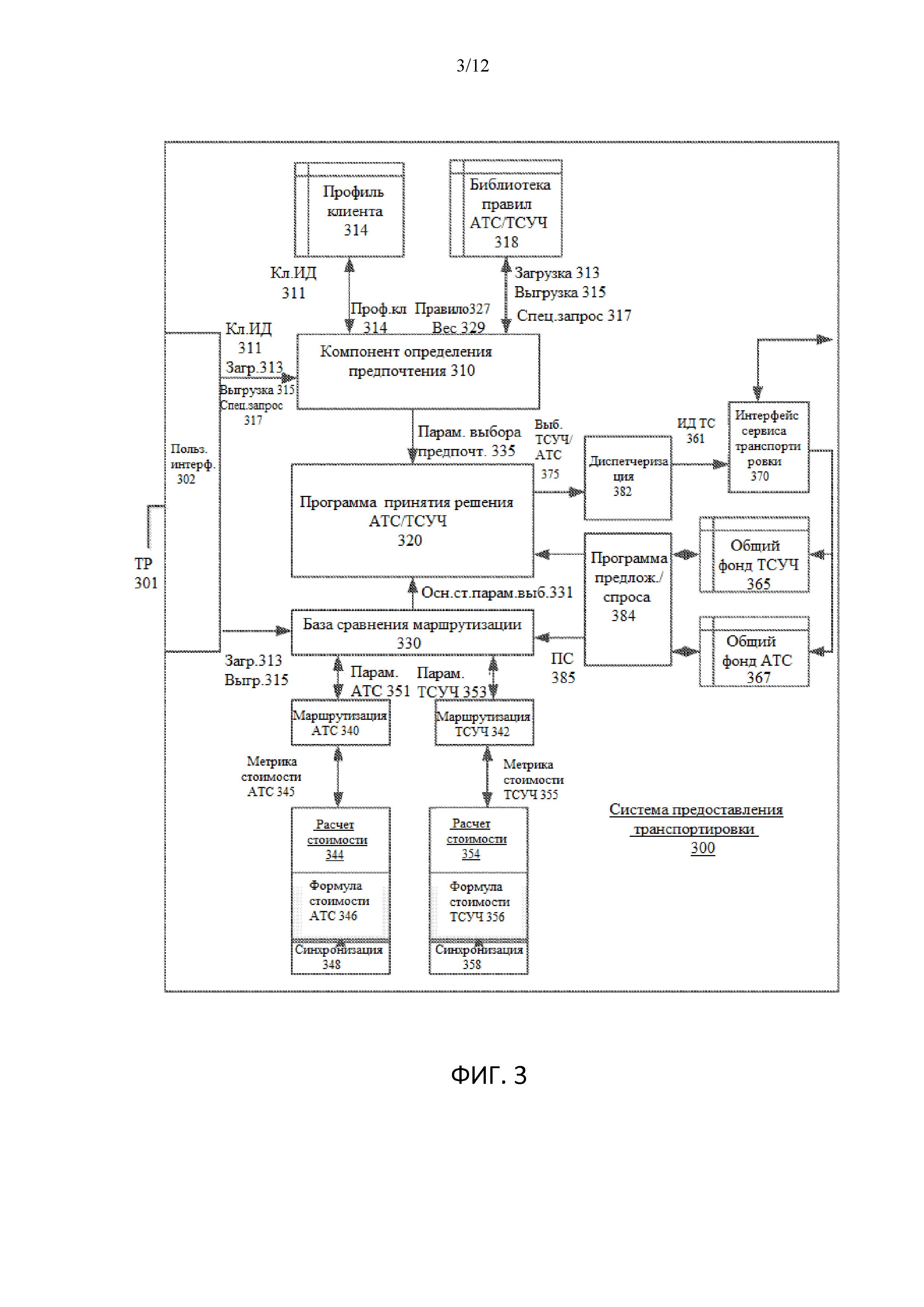
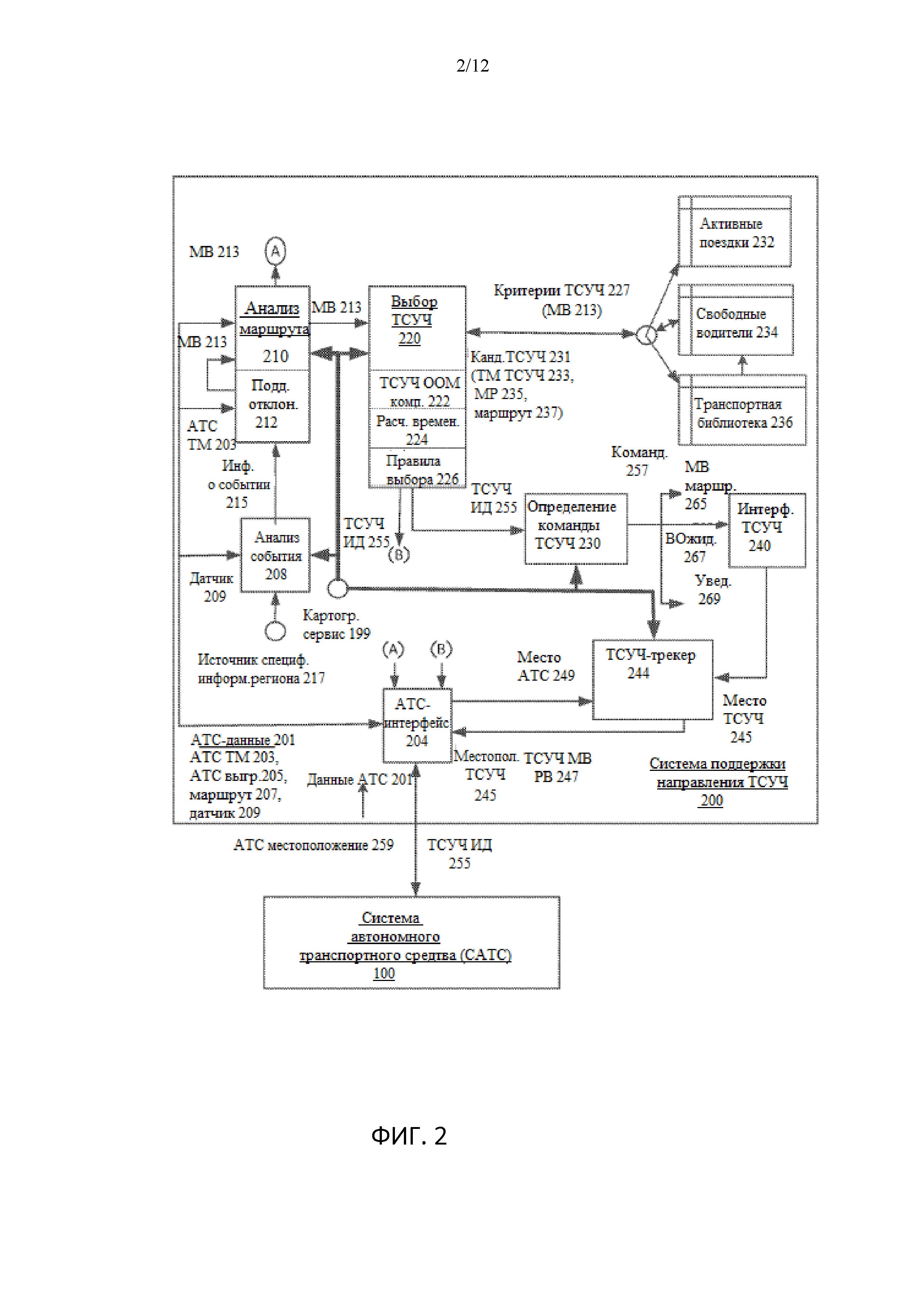
Обнаружение объектов внутри транспортного средства в связи с обслуживанием
Система и способ для предоставления транспортировки

