Результат интеллектуальной деятельности: ОБНАРУЖЕНИЕ ОБЪЕКТОВ ВНУТРИ ТРАНСПОРТНОГО СРЕДСТВА В СВЯЗИ С ОБСЛУЖИВАНИЕМ
Вид РИД
Изобретение
связанная заявка
[0001] В настоящей заявке испрашивается приоритет по патентной заявке США №14/708,611, поданной 11 мая 2015 года под названием «ОБНАРУЖЕНИЕ ОБЪЕКТОВ Внутри ТРАНСПОРТНОго СРЕДСТВа В СВЯЗИ С обслуживанием»; вышеупомянутая заявка тем самым включена в данный документ во всей своей полноте посредством ссылки.
Уровень техники
[0002] Система организации обслуживания может обеспечить организацию обслуживания, которое должно быть предоставлено запрашивающему пользователю посредством использования мобильных компьютерных устройств. Например, пользователь может запросить услугу, например услугу по транспортировке или доставке, пользуясь мобильным компьютерным устройством пользователя, и система организации обслуживания может обработать запрос, чтобы выбрать соответствующего поставщика, который может предоставить обслуживание. Система организации обслуживания может также отслеживать обслуживание, например, для определения текущего местоположения транспортного средства, до и в ходе обслуживания.
Краткое описание чертежей
[0003] Фиг.1 иллюстрирует примерную систему для обнаружения объектов внутри транспортного средства в связи с транспортным обслуживанием.
[0004] Фиг.2 иллюстрирует примерный способ обнаружения объектов внутри транспортного средства в связи с транспортным обслуживанием.
[0005] Фиг.3 иллюстрирует другой примерный способ обнаружения объектов внутри транспортного средства в связи с транспортным обслуживанием.
[0006] На фиг.4А-4D показаны примеры пользовательских интерфейсов отображаемых на мобильном компьютерном устройстве в различных примерах использования.
[0007] На фиг.5 приведена структурная схема, которая иллюстрирует компьютерное устройство, посредством которого могут быть реализованы описанные здесь варианты осуществления изобретения.
[0008] На фиг.6 приведена структурная схема, иллюстрирующая компьютерную систему, посредством которой могут быть реализованы описанные здесь примеры.
ОСУЩЕСТВЛЕНИЕ изобретения
[0009] В соответствии с описанными здесь примерами, система организации обслуживания, которая реализует сетевое обслуживание, может получать запросы для локализованных услуг и организовывать предоставление этих услуг поставщиками услуг. В поставщики услуг могут быть включены люди-водители (или управляемые человеком транспортные средства), которые получают и/или принимают вызовы на обслуживание, а в некоторых случаях, автономные (или самоуправляемые) транспортные средства, которые могут быть использованы при сетевом обслуживании для транспортировки товаров или людей. Независимо от того, назначается ли для предоставления обслуживания управляемое человеком транспортное средство или автономное транспортное средство (AV), сетевая служба может использовать информацию от набора датчиков этого транспортного средства для выполнения, при необходимости, операций для поддержания назначенного обслуживания. Например, компьютерная система, связанная с транспортным средством, может определить, используя данные датчиков, правильно ли завершено обслуживание или в транспортном средстве был случайно оставлен объект.
[0010] В некоторых примерах компьютерная система может определить, что транспортное средство было устроено для предоставления локализованного обслуживания. В зависимости от реализации, компьютерная система может соответствовать компьютерной системе, связанной с транспортным средством (например, бортовая компьютерная система транспортного средства, или водительское устройство, управляемое водителем транспортного средства), или вычислительной системе (системам), которая осуществляет сетевое обслуживание (например, внутренняя серверная система, удаленная от транспортного средства). Во время выполнения обслуживания компьютерная система может обнаружить, что объект был помещен в транспортное средство, на основе первого набора информационных данных от одного или большего количества датчиков транспортного средства в первый раз. Как описано в данном документе, датчик представляет собой устройство, которое может обнаруживать некоторые характеристики окружающей среды или обнаруживать событие или изменение в значении величины и предоставлять соответствующий выходной сигнал (например, данные от датчика). Компьютерная система может обнаруживать, во время завершения или после завершения обслуживания, был ли объект удален из транспортного средства, на основе второго набора информационных данных от одного или большего количества датчиков. В ответ на обнаружение того, что объект все еще присутствует в транспортном средстве (например, не был удален из транспортного средства), компьютерная система может автоматически выполнять корректирующее действие, такое, например, чтобы заставить водителя или транспортное средство выполнять дополнительную операцию, которая в противном случае не была бы выполнена.
[0011] В различных примерах транспортное средство может включать в себя или оснащаться одним или большим количеством датчиков, таких как набор видеокамер, набор устройств взвешивания, набор датчиков подвески, набор датчиков обнаружения света и дальности (LIDAR), набор ультразвуковых датчиков, набор датчиков определения местоположения, набор радиочастотных датчиков (таких как Bluetooth или Wi-Fi приемопередатчиков), а также других датчиков, используемых для различных действий с транспортным средством (например, датчиков двигателя, датчиков давления в шинах, датчиков открытия или закрытия дверей, датчиков ремней безопасности, внешних стерео-камер или LIDAR датчиков для AV и так далее). Набор датчиков, как описано в данном документе, может соответствовать одному или большему количеству индивидуальных датчиков или одному или большему количеству массивов датчиков. В зависимости от реализации компьютерная система может использовать информацию (данные датчиков) от одного или большего количества наборов датчиков (например, отдельного датчика или комбинации множества различных датчиков) для обнаружения того, был ли объект помещен в транспортное средство и/или был удален из транспортного средства.
[0012] Например, компьютерная система может обнаруживать положение объекта внутри транспортного средства на основе информации об изображении от набора камер, которые расположены внутри транспортного средства с соответствующими объективами набора камер, обращенными внутрь транспортного средства. В другом примере компьютерная система может обнаруживать, что объект был помещен или удален из отсека или салона транспортного средства, на основе информации о весе от набора устройств взвешивания, которые расположены внутри отсека или в салоне транспортного средства. Набор устройств взвешивания может быть расположен в транспортном средстве так, чтобы соответствующая измерительная платформа набора устройств взвешивания располагалась на нижней поверхности соответствующего отсека или внутренней части транспортного средства, ниже нее или совпадала с ней.
[0013] В другом примере компьютерная система может обнаруживать, что мобильное компьютерное устройство с беспроводной связью было помещено в транспортное средство или удалено из него, на основе того, связывается ли это мобильное компьютерное устройство с антеннами в транспортном средстве, которые используют беспроводные протоколы, такие как Bluetooth или Wi-Fi. В другом примере, если мобильное компьютерное устройство имеет собственные датчики положения, компьютерная система может сравнивать выходной сигнал этих датчиков положения с выходным сигналом датчиков положения на транспортном средстве, чтобы определять, движется ли мобильное компьютерное устройство с транспортным средством, и, следовательно, вероятно, находится внутри транспортного средства. Кроме того, в другом примере компьютерная система может обнаруживать, что объект был помещен или удален из отсека или салона транспортного средства, на основе информации о сжатии из набора датчиков подвески, которые расположены вблизи системы подвески транспортного средства или включены в нее.
[0014] Если компьютерная система обнаруживает, что объект был помещен внутрь транспортного средства как часть выполнения обслуживания по требованию или во время него и впоследствии обнаруживает, в момент завершения обслуживания или после завершения обслуживания, что объект все еще присутствует в транспортном средстве, компьютерная система может автоматически выполнить корректирующее действие, такое как передача сообщения на компьютерное устройство, связанное с пользователем, который запросил услугу и/или уведомление системы организации обслуживания о том, что объект все еще присутствует в транспортном средстве. В соответствии с некоторыми примерами, компьютерная система может также проинструктировать водителя или заставить транспортное средство оставаться неподвижным в месте нахождения транспортного средства, когда было обнаружено, что объект все еще присутствует в транспортном средстве по меньшей мере в течение заданного промежутка времени. В другом примере компьютерная система может проинструктировать водителя или заставить транспортное средство двигаться к заданному или конкретному месту, где объект может быть удален из транспортного средства.
[0015] В соответствии с примером, компьютерная система также может использовать данные датчиков для определения того, что представляет собой объект или какой тип объекта был помещен в автомобиль. Кроме того, в некоторых примерах компьютерная система может также использовать обнаружение объекта, помещаемого в транспортное средство, и/или обнаружение объекта, удаляемого из транспортного средства, для определения (или как часть определения) того, когда обслуживание началось и/или закончилось.
[0016] В соответствии с использованием в данном документе, клиентское устройство, водительское устройство и/или мобильное компьютерное устройство относится к устройствам, соответствующим настольным компьютерам, устройствам сотовой связи или смартфонам, цифровым персональным помощникам (PDA), ноутбукам, планшетным устройствам и так далее, которые могут обеспечивать сетевое соединение и ресурсы обработки для связи с удаленной компьютерной системой (системами) по одной или нескольким сетям, такой как система организации обслуживания. Удаленная компьютерная система может обращаться к одной или большему количеству компьютерных систем или серверов, которые удалены от клиентского устройства, водительского устройства и/или транспортного средства (например, соответствует внутренней серверной системе сетевой службы). Более того, в примерах, описанных в данном документе, водительское устройство или компьютерная система, связанная с транспортным средством, также может соответствовать пользовательской аппаратуре транспортного средства, такой как встроенная или бортовая компьютерная система, имеющая возможности сетевого подключения и определения местоположения.
[0017] Кроме того, описанные в данном документе примеры относятся к многообразию локализованных услуг (и/или услуг по требованию), таких как транспортное обслуживание, обслуживание грузовых автомобилей с продуктами питания, службы доставки, развлекательный сервис и так далее, которые должны быть согласованы между пользователями и поставщиками услуг. В других примерах система организации обслуживания может быть реализована любым субъектом, который предоставляет товары или услуги для покупки с использованием компьютерных устройств и сети (сетей). Для простоты в примерах, описанных в данном документе, система организации обслуживания может соответствовать системе организации транспорта, которая организует предоставление транспортных услуг для пассажиров/пользователей водителями или транспортными средствами (например, перевозку объектов или людей).
[0018] Один или большее количество описанных в данном документе примеров, предусматривают, что способы, методы и действия, выполняемые компьютерным устройством, выполняются программно или как компьютерно-выполняемый способ. Программно, как используется в данном документе, означает посредством использования кода или исполняемых компьютером инструкций. Эти инструкции могут храниться в одном или большем количестве разделов памяти компьютерного устройства. Программно выполняемый этап может выполняться автоматически или нет.
[0019] Один или большее количество описанных в данном документе примеров могут быть реализованы с использованием программных модулей, инструментов или компонентов. Программный модуль, инструмент или компонент могут включать в себя программу, подпрограмму, часть программы, или программный компонент или аппаратный компонент, способные выполнять одну или большее количество заявленных задач или функций. Как используется в данном документе, модуль или компонент может находиться на аппаратном компоненте независимо от других модулей или компонентов. Альтернативно, модуль или компонент может быть общим элементом или процессом с другими модулями, программами или аппаратами.
[0020] Некоторые описанные в данном документе примеры, могут обычно требовать использования компьютерных устройств, включающих в себя ресурсы обработки и памяти. Например, один или большее количество описанных в данном документе примеров могут быть реализованы, целиком или частично, на компьютерных устройствах, таких как серверы, настольные компьютеры, сотовые телефоны или смартфоны, персональные цифровые помощники (например, PDA), портативные компьютеры, принтеры, цифровые фоторамки, сетевое оборудование (например, маршрутизаторы) и планшетные устройства. Память, обработка и сетевые ресурсы могут быть все использованы в связи с созданием, использованием или выполнением любого описанного в данном документе примера (в том числе, с выполнением любого способа или с реализацией любой системы).
[0021] Кроме того, один или большее количество описанных в данном документе примеров, могут быть реализованы с использованием инструкций, исполняемых одним или большим количеством процессоров. Эти инструкции могут быть выполнены на машиночитаемом носителе. Аппараты, показанные или описанные на нижеприведенных чертежах, предлагают примеры ресурсов по обработке и машиночитаемых носителей, на которые инструкции для реализации описанных здесь примеров, могут быть перенесены и/или исполнены. В частности, многочисленные аппараты, показанные на описанных в данном документе примерах, включают в себя процессор (процессоры) и различные формы памяти для хранения данных и инструкций. Примеры машиночитаемых носителей включают в себя постоянные запоминающие устройства хранения данных, такие как жесткие диски на персональных компьютерах или серверах. Другие примеры компьютерных носителей информации включают в себя портативные устройства хранения, такие как CD или DVD-устройства, флэш-память (такая, как применяемая в смартфонах, многофункциональных устройствах или планшетах) и магнитную память. Компьютеры, терминалы, устройства с сетевой поддержкой (например, мобильные устройства, такие как сотовые телефоны) - все это примеры аппаратов и устройств, которые используют процессоры, память и инструкции, хранящихся на машиночитаемых носителях. Дополнительно примеры могут быть реализованы в виде компьютерных программ или совместимого с компьютером носителя, способного выполнять такую программу.
ОПИСАНИЕ СИСТЕМЫ
[0022] Фиг.1 иллюстрирует примерную систему для обнаружения объектов внутри транспортного средства в связи с транспортным обслуживанием. В зависимости от реализации, такая система может быть реализована посредством и эксплуатироваться на мобильном компьютерном устройстве водителя, внутренней компьютерной системе транспортного средства или системе организации обслуживания, которая обеспечивает сетевое обслуживание. Для простоты, в примере на фиг.1, система 100 описана как реализованная и эксплуатируемая на внутренней компьютерной системе транспортного средства, такой как AV, посредством исполнения инструкций, хранящихся в одном или большем количестве ресурсов памяти внутренней компьютерной системы. Как описано в данном документе, система 100 может включать в себя, быть частью или соответствовать приложению или операционной системе внутренней компьютерной системы, которая связывается с системой 190 организации обслуживания по одной или большему количеству сетей.
[0023] Согласно примерам, система 100 может включать в себя управление 110 системой, определение 120 местоположения, обнаружение 130 объекта, базу 140 данных местоположений, базу 150 данных о поездках и интерфейс 160 обслуживания. Для простоты, другие компоненты системы 100, такие как компонент пользовательского интерфейса, другие базы данных, интерфейсы устройств для связи с компонентами устройств и так далее, не показаны на фиг.1. Компоненты системы 100 могут объединяться для обнаружения объектов, которые помещаются внутрь и/или удаляются из транспортного средства в связи с транспортным обслуживанием. Логику можно реализовать с помощью различных приложений (например, программного обеспечения) и/или аппаратными средствами компьютерной системы, которая реализует систему 100.
[0024] В одном примере система 100 может связываться с системой 190 организации обслуживания через интерфейс 160 обслуживания. Как описано в данном документе, система 190 организации обслуживания может связываться с множеством устройств поставщиков услуг (например, водительскими устройствами и/или внутренними компьютерными системами транспортного средства) и множеством клиентских (или пользовательских) устройств для организации транспортного обслуживания между пользователями и поставщиками услуг. Система 190 организации обслуживания может быть реализована на сторонних сетевых ресурсах, таких как один или большее количество серверов или центров обработки данных, или реализована через другие компьютерные системы в альтернативных построениях (например, одноранговые сети и так далее). Как правило, пользователь может применять клиентское или пользовательское устройство (для простоты не показано на фиг.1) для связи с системой 190 организации обслуживания по сети (сетям) и сделать запрос на транспортное обслуживание в определенном месте (например, месте, где надо забрать багаж или человека, подлежащих транспортировке). В некоторых примерах пользовательское устройство может запускать назначенное сервисное приложение, которое связывается с системой 190 организации обслуживания. Система 190 организации обслуживания может получить запрос и программно выбрать поставщика услуг для обеспечения транспортного обслуживания.
[0025] В зависимости от реализации, если система 190 организации обслуживания выбирает человека-водителя для предоставления услуги, система 190 организации обслуживания может передать приглашение устройству выбранного водителя, тем самым предоставляя водителю возможность принять или отклонить приглашение предоставить транспортную услугу для запрашивающего пассажира. В другом примере, если система 190 организации обслуживания выбирает AV из множества доступных AV (и/или людей-водителей) для предоставления услуги, такой, как описанная на фиг.1, система 190 организации обслуживания может передать информацию об услуге (называемой инструкцией 191 по обслуживанию) в систему 100 через интерфейс 160 обслуживания.
[0026] В соответствии с примерами, интерфейс 160 обслуживания позволяет системе 100 обмениваться данными между системой 100 и системой 190 организации обслуживания. Например, интерфейс 160 обслуживания может использовать один или больше сетевых ресурсов внутренней компьютерной системы транспортного средства для обмена сообщениями по одной или нескольким беспроводным сетям (например, через сотовый трансивер, приемопередатчик WLAN и так далее). Интерфейс 160 обслуживания может включать в себя или использовать прикладной программный интерфейс (API), такой как API внешней связи, для передачи данных с помощью системы 190 организации обслуживания. Интерфейс API внешней связи может обеспечить доступ к системе 190 организации обслуживания через защищенные каналы доступа по сети любым количеством способов, таких как интернет-форматы, программный доступ через поддерживающие API, простой протокол доступа к объектам (SOAP), удаленный вызов процедур (RPC), доступ к сценариям и так далее.
[0027] В примере на фиг.1, система 190 организации обслуживания обработала запрос пользователя на транспортное обслуживание и выбрала AV, который реализует систему 100 для предоставления транспортного обслуживания запрашивающего пользователя. Система 190 организации обслуживания может определить, на основе местоположения места погрузки, указанного запрашивающим пользователем, и текущего местоположения (или самых недавних из определенных местоположений) доступных поставщиков услуг рядом с местом погрузки (например, на заданном расстоянии от места погрузки), что AV, реализующее систему 100, должно предоставить транспортное обслуживание. Система 190 организации обслуживания может передать инструкции 191 по обслуживанию о транспортном обслуживании, чтобы дать указания транспортному средству о том, куда двигаться и/или что делать. В некоторых примерах инструкции 191 по обслуживанию могут включать в себя информацию 192 о пользователе (например, идентификатор пользователя, контактную информацию пользователя, рейтинг пользователя и так далее), место 193 погрузки, указанное пользователем (например, адрес, ориентир, данные о точке местоположения, соответствующие координате по широте и долготе), место 194 назначения и/или другую информацию, такую как тип транспортного обслуживания (например, транспортирование человека, доставка багажа и так далее), или сведения о количестве людей или количестве мест багажа. Инструкции 191 по обслуживанию могут, в одном примере, заставить компонент (компоненты) AV по управлению транспортным средством управлять, по меньшей мере частично, AV для передвижения к соответствующим местам. Другими словами, компонент (компоненты) управления транспортным средством может использовать некоторые или все инструкции 191 по обслуживанию (в дополнение к другой информации), чтобы управлять транспортным средством, для перемещения к месту погрузки и/или месту назначения или разгрузки.
[0028] Системное управление 110 может принимать инструкции 191 по обслуживанию и в ответ может выполнять множество операций от имени системы 100. Например, управление 110 системой может обрабатывать инструкции 191 по обслуживанию путем определения информации о транспортном обслуживании, которое оно должно выполнять, и может инициировать выполнение транспортного обслуживания посредством определения маршрута (маршрутов) для передвижения к месту погрузки и/или месту назначения и управления AV для передвижения к месту погрузки и/или месту назначения.
[0029] В одном примере компонент управления поездкой системного управления 110 может создать запись 151 о поездке для транспортного обслуживания, используя часть или всю информацию из инструкций 191 по обслуживанию, и сохранить запись 151 о поездке в базе 150 данных о поездке системы 100. Компонент управления поездкой может затем обновить запись 151 о поездке, внеся информацию о местоположении транспортного средства, при выполнении транспортным средством транспортного обслуживания (например, передвигается к месту погрузки из текущего местоположения, загружает пользователя или объект, передвигается к месту выгрузки и так далее). Компонент управления поездкой также может записывать в записи 151 о поездке, время и местоположение транспортного средства, когда были получены инструкции 191 по обслуживанию, когда обслуживание началось, и когда обслуживание завершилось. Запись 151 о поездке может использоваться системой 100 и/или системой 190 организации обслуживания для определения стоимости транспортного обслуживания для запрашивающего пользователя (например, после завершения) и для сохранения архивной записи об AV и/или о запрашивающем пользователе.
[0030] Определение 120 местоположения может обеспечить управление 110 системой информацией о местоположении транспортного средства, получая данные о положении пунктов 121 (например, периодически) из одного или большего количества геоинформационных ресурсов внутренней компьютерной системы транспортного средства. Например, определение 120 местоположения может периодически определять текущее положение транспортного средства, связываясь с помощью, например, интерфейса устройства, с GPS приемником водительского устройства, одним или большим количеством других датчиков и/или одним или большим количеством приемопередатчиков (например, сотовым приемопередатчиком, Wi-Fi приемопередатчиком), для определения 121 текущей точки данных о местоположении транспортного средства. В одном примере определение 120 местоположения может периодически звонить на GPS приемник, например каждые две секунды или четыре секунды и так далее, чтобы периодически принимать текущую точку 121 данных местоположения водительского устройства. Определение 120 местоположения также может определять связанную временную метку каждой определенной точки 121 данных о местоположении транспортного средства. В зависимости от реализации определение 120 местоположения может получать отметку времени (и/или значение ошибки) вместе с точкой 121 данных о местоположении транспортного средства от GPS приемника или может определять временную отметку точки 121 данных о местоположении с использованием отдельных часов (например, внутренних часов водительского устройства). Управление 110 системой может хранить точки 121 данных о местоположении в базе 140 данных о местоположения и/или в записи 151 о поездке для сохранения данных о том, где транспортное средство передвигалось в связи с транспортным обслуживанием. Как дополнение или альтернатива, определение 120 местоположения может хранить точки 121 данных о местоположении транспортного средства в базе 140 данных о местоположении.
[0031] Возвращаясь к управлению 110 системой, компонент управления поездкой также может использовать точки 121 данных о местоположении из определения 120 о местоположении для слежения за транспортным средством. Компонент управления поездкой может определять положение и состояние транспортного средства или системы 100 в связи с выполнением транспортного обслуживания (например, на какой стадии транспортного обслуживания находится транспортное средство). Например, состояние системы 100, возможно, ранее было доступным состоянием, что соответствует состоянию, в котором транспортному средству системой 190 организации обслуживания может быть назначено транспортное обслуживание. Когда система 100 принимает инструкции 191 по обслуживанию, компонент управления поездкой может перевести систему 100 в другое состояние, например, в состояние «на маршруте», которое соответствует передвижению транспортного средства к месту погрузки. Аналогично, каждый раз, когда компонент управления поездкой определяет, что транспортное обслуживание началось или закончилось, компонент управления поездкой может перевести систему 100 в соответствующее состояние (например, изменить состояние нахождения в пути на состояние поездки, или изменить из состояния поездки в завершенное или доступное состояние, соответственно). Компонент управления поездкой может хранить информацию о состоянии и/или о том, когда происходит изменение состояния, вместе с соответствующими точками 121 данных о местоположении в записи 151 о поездке транспортного обслуживания.
[0032] Кроме того, в качестве дополнения или альтернативы, система 190 организации обслуживания может локально формировать и сохранять свою собственную запись о поездке, которая соответствует или аналогична записи 151 о поездке, хранящейся в системе 100. Компонент управления поездкой может периодически предоставлять вышеописанную информацию о транспортном обслуживании системе 190 организации обслуживания, например, посредством информации 111 о состоянии и/или точках 113 данных о местоположении. Система 190 организации обслуживания может использовать полученную от системы 100 информацию для предоставления обновляемой информации о транспортном обслуживании для запрашивающего пользователя (например, о местоположении AV и/или о текущем состоянии AV и так далее). Дополнительно, система 190 организации обслуживания может определять из информации 111 о состоянии и/или точек 113 данных о местоположении, когда транспортное обслуживание началось или завершилось и/или когда AV доступно для предоставления другого транспортного обслуживания.
[0033] В дополнение к созданию и обновлению записи 151 о поездке для транспортного обслуживания, управление системой 110 может инициировать выполнение транспортного обслуживания, основанного, по меньшей мере, частично, на инструкциях 191 по обслуживанию. Согласно некоторым примерам, компонент управления транспортным средством управления 110 системой может управлять AV для выполнения транспортного обслуживания. В зависимости от реализации, компонент управления транспортным средством может взаимодействовать с системой управления AV или может соответствовать системе управления AV. Как описано в данном документе, AV включает в себя: (i) компьютерные ресурсы, которые реализуют систему 100 и/или систему управления AV, (ii) другие подкомпоненты или подсистемы для управления различными другими операциям или частями AV и (iii) множество частей транспортного средства. Для простоты в данном документе обсуждаются не все части AV.
[0034] В соответствии с примерами, различные части AV могут включать в себя, но не ограничиваются рамой или шасси, корпусом (например, включающим в себя двери, бамперы, окна, кабину, сиденья, багажник и так далее), шины, систему подвески, тормозную систему, систему рулевого управления, электрическую систему (например, включающую в себя аккумуляторы, провода, кабели, подсистему сигнализации и так далее), систему трансмиссии (например, включающую в себя привод, двигатель и так далее), топливную систему, выхлопную систему, систему охлаждения и систему управления AV. AV может также включать в себя электронные блоки управления (ECU), которые включают в себя контроллеры и/или микроконтроллеры и другие электронные компоненты, которые могут управлять различными системами или подсистемами AV, такие как блок управления дверьми, блок управления двигателем, блок управления скоростью, блок управления трансмиссией и так далее. Система управления AV может быть запрограммирована посредством исполнения одним или несколькими процессорами инструкций, хранящихся в памяти, для управления AV путем отправки управляющих сигналов и приема данных (например, данных обратной связи или датчиков) из различных систем и частей транспортного средства. Для целей данной заявки управляющей системе AV могут быть даны инструкции управлять AV так, чтобы безопасно вести его по дорогам и улицам для перемещения из одного места в другое в связи с транспортным обслуживанием.
[0035] Кроме того, AV может включать в себя модуль определения местоположения или ресурсы, такие как GPS приемник и/или беспроводные приемопередатчики, для определения местоположения AV относительно других объектов или в системе координат. AV может также включать в себя множество датчиков, таких как набор камер, набор стереокамер, набор радаров, набор LIDAR датчиков и так далее, чтобы AV мог определять среду окружения AV в реальном времени. Один или большее количество (или все) указанных датчиков могут быть расположены на внешней стороне транспортного средства (например, спереди, сзади, на крыше транспортного средства и так далее) для обнаружения информации об окружающей среде вокруг AV, например, о положении транспортного средства по отношению к дорогам, строениям, другим транспортным средствам и так далее, или о положении неодушевленных предметов. Например, чтобы AV могло передвигаться из текущей позиции или местоположения (например, определенного по GPS приемнику в качестве точки 121 данных о местоположении) к обозначенному местоположению (например, к местоположению 193 погрузки и/или местоположению 194 назначения, указанному в инструкции 191 по обслуживанию), система управления AV может получить доступ к хранящейся подробной пространственной карте (картам) региона, в котором оно находится (например, включая данные 112 карты), и определить маршрут (маршруты) для передвижения к указанному местоположению. На основе выявленной среды, окружающей AV (из данных, периодически и непрерывно обнаруживаемых набором датчиков), система управления AV может периодически выполнять операции принятия решений, которые дают указания AV, чтобы предпринять определенное действие (действия) для перемещения к указанному месту. В результате каждой операции принятия решения система управления AV может определить, что оно должно передвигаться в определенном направлении с определенной скоростью в один момент времени, например, а в следующий момент времени может определить, что оно должно замедлиться до определенной скорости, слегка изменить ориентировку/направления или изменить полосу движения и так далее. Система управления AV может соответственно обеспечить сигналы управления для различных компонентов/систем транспортного средства.
[0036] В одном примере, когда AV передвигается к месту погрузки для того, чтобы начать транспортное обслуживание, система 100 может периодически определять, достигло ли AV указанного места погрузки (например, начального местоположения). Другими словами, система 100 может периодически проверять, когда AV прибудет к месту погрузки или будет находиться на заданном расстоянии (или в пределах заданного предполагаемого времени в пути) от него. Например, компонент управления поездкой может периодически сравнивать текущее местоположение (например, последнюю точку 121 данных о местоположении, обеспечиваемую определением 120 местоположения), с местом 193 и определять, находится ли AV в пределах заданного расстояния или предполагаемого времени в пути. Когда компонент управления поездкой определяет, что AV находится на заданном расстоянии или времени в пути, компонент управления поездкой может изменить состояние системы 100 из состояния «на маршруте» на состояние «прибывает/прибыл». Информация 111 об этом изменении состояния может быть передана системе 190 организации обслуживания, чтобы система 190 организации обслуживания могла предоставлять обновленную информацию об AV на устройство запрашивающего пользователя.
[0037] В дополнение, в соответствии с примером на фиг.1, система 100 может также определить, был ли в транспортное средство помещен объект (объекты) в связи с транспортным обслуживанием. В некоторых случаях водителю или системе управления AV может потребоваться определить, поместил ли запрашивающий пользователь объект в транспортное средство при транспортировке (например, багаж, ящики, бакалейные товары) или определить, был ли объект помещен в транспортное средство для транспортного обслуживания по доставке. Как описано в данном документе, объект может соответствовать предмету (предметам) или лицу (лицам), которые помещаются внутрь или входят в транспортное средство. Обнаружение 130 объекта может связываться с одним или большим количеством наборов датчиков или одним или большим количеством комбинаций датчиков AV через один или большее количество интерфейсов транспортного средства или датчиков для приема данных 131 датчиков, и на основе данных 131 датчиков может определить, был ли объект помещен в (или удален из) AV (называемое здесь процессом или операцией обнаружения объекта). В одном примере обнаружение 130 объекта может передавать набор сигналов управления в датчики для того, чтобы вызвать (или запустить) предоставление датчиками данных 131 от датчиков. Такие датчики могут включать в себя набор камер, набор устройств взвешивания, набор датчиков подвески, набор датчиков обнаружения освещения и дальности (LIDAR) датчиков, набор радиочастотных антенн и/или приемопередатчиков, и/или набор ультразвуковых датчиков, которые расположены в транспортном средстве или предусмотрены в нем для обнаружения наличия, положения и/или веса одного или большего количества объектов.
[0038] В некоторых примерах обнаружение 130 объекта может выполнять процесс обнаружения объекта посредством (i) приема данных 131 датчика от одного или большего количества датчиков, (ii) обработки полученных данных 131 датчика с использованием другой информации (например, шаблонов или ранее сохраненных данных) и (iii) определения того, был ли объект помещен в AV (если он ранее не был в AV) или определение того, был ли объект удален из AV (если он был ранее в AV). Например, обнаружение 130 объекта может принимать информацию об изображении от одной или большего количества камер, расположенных внутри багажника AV (например, с линзой, обращенной внутрь багажника), и обрабатывать информацию об изображении с использованием процессов обработки изображений или распознавания изображений и/или путем сравнения информации об изображении с ранее сохраненным базовой информацией об изображении о багажнике (например, показывая изображение багажника, когда он был пустым или изображение багажника перед получением инструкций 191 по обслуживанию). Сохраненная базовая информация об изображении может быть заранее определенным изображением или может быть изображением, зафиксированным одной или большим количеством камер в момент перед тем, как AV достигнет места 193 погрузки или будет находиться вблизи него. Кроме того, в одном примере обнаружение 130 объекта может использовать обработку изображения (а также другие данные, сохраненные или полученные из системы 190 организации обслуживания) для определения того, что представляет собой объект, на основе визуальных характеристик объекта в изображении.
[0039] В других примерах, когда один или большее количество других датчиков используется для обнаружения присутствия или положения объекта, обнаружение 130 объекта может использовать другую базовую или модельную информацию в качестве основы для сравнения с полученными от датчика данными 131. Например, обнаружение 130 объекта может принимать данные 131 датчика от одного или большего количества устройств взвешивания или датчиков, которые расположены в отсеке AV, так что его соответствующая измерительная платформа находится на или совмещена с расположенной ниже нижней поверхности такого отсека. Обнаружение 130 объекта может определить изменение в размерах из данных 131 датчика в момент до того, как AV достигло места 193 погрузки или находится рядом с ним и после начала обслуживания.
[0040] В зависимости от реализации обнаружение 130 объекта может выполнить процесс обнаружения объекта в разные моменты времени. Например, обнаружение 130 объекта может одновременно выполнять процесс обнаружения объекта, пока AV передвигается к месту 193 погрузки и/или пока компонент управления поездкой определяет, находится ли AV на заданном расстоянии или в расчетном интервале времени движения до места 193 погрузки. Обнаружение 130 объекта может периодически совершать вызовы на набор датчиков для получения данных 131 отдатчиков. В другом примере обнаружение 130 объекта может выполнять процесс обнаружения объекта в разных случаях, при получении указаний или запуска от управления 110 системой (через сигнал 115 запуска). Например, когда компонент управления поездкой определяет, что AV находится на заданном расстоянии или заранее определенном расчетном времени движения до места 193 погрузки, компонент управления поездкой может передать сигнал 115 запуска, чтобы вызвать выполнение процесса обнаружения объекта обнаружением 130 объекта. Кроме того, как еще один вариант, компонент управления поездкой может передать сигнал 115 запуска, когда он определяет, что AV неподвижно в течение заданного промежутка времени и/или когда он определяет, что AV неподвижно в течение заданного промежутка времени, в то время как AV находится на заданном расстоянии или заранее определенном расчетном времени движения до места 193 погрузки. В качестве еще одного примера, обнаружение 130 объекта может быть инициировано для выполнения процесса обнаружения объекта, когда компонент управления поездкой определяет, что транспортное обслуживание началось. Заставляя обнаружение 130 объекта выполнять процесс обнаружения объекта в выбранные моменты времени, система 100 может уменьшить чрезмерное потребление энергии и компьютерных ресурсов, заставляя датчик (датчики) активироваться (из приостановленного или спящего состояния) и обнаруживать или выполнять измерение только по необходимости.
[0041] Если обнаружение 130 объекта обнаруживает положение объекта или обнаруживает, что объект был помещен в транспортное средство на основе первого набора данных 131 датчика, обнаружение 130 объекта может предоставлять информацию 133 об объекте для управления 110 системой. Информация 133 об объекте может указывать управлению 110 системой, что объект был помещен в AV (например, сообщением, или может быть переключен двоичный разряд) и/или может включать в себя информацию об этом объекте, основанную на типах датчика (датчиков), которые используются в AV для выполнения обнаружения. Например, дополнительная информация может включать в себя (i) что представляет собой объект (например, ящик, сумку, скейтборд и так далее), (ii) одно или большее количество изображений объекта, зафиксированных набором камер, если используются камеры, (iii) измерения, относящиеся к объекту (например, вес, если используются устройства взвешивания или датчики подвески, или размеры объекта, если используются камеры, LIDAR датчики или ультразвуковые датчики и так далее) и/или (iv), где объект располагается (например, в каком отсеке или положение объекта). Компонент управления поездкой может хранить некоторую или всю информацию об объекте 133 с помощью записи 151 о поездке, связанной с транспортным обслуживанием, так что информация об объекте может быть зарегистрирована и связана с конкретным пользователем.
[0042] Как было описано, одновременно (или до или после) с тем, что обнаружение 130 объекта обнаруживает объект, компонент управления поездкой может определить, что транспортное обслуживание началось. В некоторых примерах управление 110 системой может определить, что транспортное обслуживание инициировано, на основе, по меньшей мере частично, обнаружения того, что объект был помещен в транспортное средство. Транспортное обслуживание может соответствовать перевозке человека (и/или вещей человека) от одного места к другому, или перевозке объекта для доставки из одного местоположения к другому. Обнаружение 130 объекта может обнаружить, по одному или большему количеству датчиков, таких как камера или устройства взвешивания, что человек и/или объекты попали в транспортное средство, или что объект (без человека) был помещен в транспортное средство. В этом примере набор камер (или LIDAR датчиков или ультразвуковых датчиков) можно разместить внутри кабины/салона транспортного средства для того, чтобы позволить обнаружению 130 объекта обнаружить, что человек вошел в транспортное средство, используя информацию об изображении от камеры (камер) и обрабатывая изображение (изображения). В качестве дополнения или альтернативы набор устройств взвешивания или набор датчиков подвески, которые расположены вблизи или включены в систему подвески AV, может определить, что некоторое количество массы было добавлено к транспортному средству.
[0043] Как только транспортное обслуживание началось, компонент управления поездкой может сохранять информацию о выполнении транспортного обслуживания (например, время и/или местонахождение AV), в том числе время начала и начальное местоположение транспортного обслуживания, в записи 151 о поездке. При движении AV к месту 194 назначения транспортного обслуживания, компонент управления поездкой может также использовать точки 121 данных о местоположении для определения того, когда AV приближается и дошло до места 194 назначения, с целью определения, по меньшей мере частично, что транспортное обслуживание было завершено.
[0044] В одном примере, в случаях, когда обнаружение 130 объекта ранее обнаружившее объект в связи с транспортным обслуживанием (например, пассажир поместил сумку в багажник AV), компонент управления поездкой может заставить обнаружение 130 объекта также определять, был ли объект удален из транспортного средства. Обнаружение 130 объекта может обнаружить, был ли объект удален из транспортного средства в различные моменты времени, в зависимости от вариантов. Согласно одному примеру, управление 110 системой может заставить обнаружение 130 объекта выполнять процесс обнаружения объекта одновременно с движением AV к месту 194 назначения (например, периодически) или выполнять процесс обнаружения объекта, когда компонент управления поездкой определяет, что AV находится в пределах заданного расстояния или заданного предполагаемого времени движения до места 194 назначения. В качестве дополнения или альтернативы, компонент управления поездкой может заставить обнаружение 130 объекта выполнить процесс обнаружения объекта, когда компонент управления поездкой определяет, что AV неподвижен в течение заданной продолжительности времени, когда компонент управления поездкой определяет, что AV неподвижен для заданной длительности времени, в то время как AV находится в пределах заданного расстояния или заданного предполагаемого времени движения до места 194 назначения или в ответ на обнаружение того, что транспортное обслуживание было завершено.
[0045] Когда компонент управления поездкой определяет, что транспортное обслуживание была завершено, обнаружение 130 объекта может, например, выполнить процесс обнаружения объекта, чтобы определить, был ли объект удален, с использованием данных 131 датчика, полученных от набора датчиков (например, второго набора данных 131 датчика). Если обнаружение 130 объекта обнаруживает, что объект все еще присутствует, оно может предоставить информацию управлению 110 системой, указывающую, что объект все еще присутствует в транспортном средстве. В ответ управление 110 системой может автоматически выполнять корректирующее действие. С другой стороны, если обнаружение 130 объекта обнаруживает, что объект был удален, никакого корректирующего процесса или действия не предпринимается. В одном варианте, если система 100 обнаруживает, что объект был удален (например, в случае транспортной услуги по доставке), система 100 может определить, что транспортное обслуживание по доставке завершено.
[0046] Как описано в данном документе, корректирующее действие может соответствовать операции (или набору операций), которую система 100 выполняет для возврата объекта, если он был случайно оставлен, пользователю или облегчает пользователю возвращение объекта. В различных вариантах осуществления корректирующее действие (действия) может быть выполнено системой 100 и/или выполнено системой 100 в связи с системой 190 организации обслуживания. В последнем примере корректирующее действие (действия) может быть выполнено в результате обмена данными между системой 100 и системой 190 организации обслуживания.
[0047] В одном примере управление 110 системой может получать информацию, что объект все еще остается в транспортном средстве и/или информацию о самом объекте (например, на основе недавно определенной информации об объекте, или из информации 133 об объекте, полученной ранее, если объект был ранее обнаружен) и может создать сообщение 117 об объекте на основе такой информации. Сообщение 117 об объекте может включать в себя, например, время и/или местоположение, когда транспортное обслуживание было завершено, идентификатор AV, идентификатор пользователя, идентификатор транспортного обслуживания и информацию об объекте (например, о том, что представляет собой объект, одно или большее количество изображений объекта, измерения, относящиеся к объекту, где находится объект). Управление 110 системой может определить коммуникационный идентификатор для пользователя (например, номер телефона или адрес электронной почты пользователя или временно связанный с учетной записью пользователя) и передать сообщение 117 об объекте на компьютерное устройство пользователя. Такое сообщение 117 об объекте может также включать в себя уведомительную информацию, чтобы заставить компьютерное устройство пользователя отображать содержимое для информирования пользователя о том, что объект был оставлен в AV, и/или чтобы связаться с лицом, которое предоставляет систему 190 организации обслуживания (например, через назначенное приложение, запущенное на компьютерном устройстве пользователя). В качестве дополнения или альтернативы, сообщение 117 об объекте может быть передано системе 190 организации обслуживания, которая может затем передать сообщение, в том числе уведомительную информацию, компьютерному устройству пользователя. Уведомительная информация, отображаемая для пользователя, может предоставлять информацию об объекте и/или о том, как пользователь может вернуть объект. Примеры различной уведомительной информации проиллюстрированы на фиг.4A-4D.
[0048] В качестве дополнения или альтернативы управление 110 системой также может выполнить одно или большее количество корректирующих действий путем позиционирования AV в определенном месте (например, заставляя AV перемещаться в определенное место или оставляя его неподвижным в определенном месте). Например, когда должно выполняться корректирующее действие, управление 110 системой может получить доступ к сохраненным инструкциям по позиционированию, которые дают указания компоненту управления транспортным средством управлять, через компоненты транспортного средства, так, чтобы AV оставался неподвижным в (i) месте 194 назначения или (ii) в местоположении транспортного средства, когда обнаружение 130 объекта обнаружило, что объект все еще присутствовал в транспортном средстве. Заставляя AV оставаться неподвижным в указанном месте, сообщение 117 об объекте может информировать пользователя, что объект пользователя оставлен в AV, и что AV останется в указанном месте в течение заданного времени (например, две минуты). Альтернативно, сохраненные инструкции по позиционированию могут дать указание компоненту управления транспортным средством, заставляя AV двигаться к указанному месту (например, месту хранения или офисному зданию, где хранятся потерянные объекты), а сообщение 117 об объекте может информировать пользователя о том, что объект может быть возвращен в указанном месте в определенные периоды времени.
[0049] В некоторых примерах, где AV двигается в указанное место, такое как место хранения или место передачи, AV может использовать автоматически управляемые приводы, чтобы удалить объект из AV для хранения или передачи. Например, само AV может включать в себя один или большее количество приводов, соединенных с одной или большим количеством механических рук в салоне транспортного средства или в багажнике, которые могут захватить объект и удалить его. В другом примере AV может переместиться к указанной полосе или точке в месте хранения или передачи, открыть двери транспортного средства и/или багажник, и автоматически управляемый механический рычаг и рука или захват может удалить объект из транспортного средства.
[0050] Кроме того, в другом примере управление 110 системой может предоставить информацию системе 190 организации обслуживания, указывающую, что объект был оставлен, и в ответ система 190 организации обслуживания может передать инструкции системе 100, чтобы заставить AV выполнять одно или большее количество заданий. В одном варианте система 190 организации обслуживания может передавать инструкции для транспортного средства управлению 110 системой, что заставляет компонент управления транспортным средством управлять перемещением и работой AV. Инструкции для транспортного средства могут заставить AV перемещаться в указанное место или оставаться неподвижным в определенном месте.
[0051] В некоторых случаях после выгрузки пользователя в пункте 194 назначения, AV может быть организовано/выбрано для предоставления транспортного обслуживания другому запрашивающему пользователю. В результате система 100 может выполнить корректирующее действие, такое как передача сообщения 117 об объекте, но также заставить AV двигаться к месту погрузки, указанному следующим запрашивающим пользователем. В некоторых примерах система 190 организации обслуживания (или система 100) может передать сообщение на компьютерное устройство пользователя, которое запрашивает пользователя для ответной входной информации, чтобы (i) дать указание по удалению объекта, (ii) задать вопрос лицу, которое выполняет удержание системы 190 организации обслуживания на данном объекте от имени пользователя в течение определенного периода времени, (iii) запросить транспортное обслуживание в указанном месте, где находится объект, или (iv) запросить доставку объекта к текущему местоположению пользователя (или указанному местоположению). Одно или большее количество этих дополнений могут быть связаны с дополнительной стоимостью для пользователя. Система 190 организации обслуживания может принимать пользовательский входной сигнал через приложение на компьютерном устройстве пользователя и может, соответственно, обрабатывать ответ. Например, если пользователь предоставляет входной сигнал для получения доставки объекта в текущее местоположение пользователя, система 190 организации обслуживания может обработать ответ как запрос транспортного обслуживания по доставке, идентифицировать предыдущее AV, в котором находится объект, и планировать именно это AV для движения к текущему местоположению пользователя (например, до, во время или после завершения последующего транспортного обслуживания последующего запрашивающего пользователя). В этом примере пользователь может нести расходы за доставку как отдельное транспортное обслуживание в полном объеме или как часть предыдущего транспортного обслуживания пользователя (например, как доплата).
[0052] Хотя система 100 на фиг.1 описывается как реализуемая на компьютерных ресурсах автономного транспортного средства, в некоторых примерах система 100 может быть реализована на мобильном компьютерном устройстве, управляемом водителем транспортного средства (например, водительском устройстве). Например, система 100 может быть реализована как приложение или программа (или как часть приложения), которая выполняется на водительском устройстве, и которая обменивается данными с системой 190 организации обслуживания по одной или большему количеству сетей. В таких примерах система 100 может включать в себя другие компоненты, такие как компонент пользовательского интерфейса, который создает и представляет контент (например, графические пользовательские интерфейсы) на дисплее водительского устройства. Когда водитель выбирается системой 190 организации обслуживания для предоставления транспортного обслуживания запрашивающего пользователя, в отличие от приема инструкций 191 по обслуживанию, система 100 может принимать и отображать приглашение предоставить транспортное обслуживание через компонент пользовательского интерфейса, и водитель может принять или отклонить приглашение. Приглашение может включать в себя информацию 192 о пользователе, место 193 погрузки и/или место 194 назначения.
[0053] Кроме того, в примерах, где система 100 реализована посредством водительского устройства, обнаружение 130 объекта может принимать данные 131 датчика через коммуникационный интерфейс водительского устройства, такой как коммуникационный приемопередатчик беспроводной связи малого радиуса действия (например, Bluetooth или Wi-Fi) или порт с физическим разъемом. Водитель может зафиксировать или закрепить в багажнике или на заднем сиденье транспортного средства и так далее, один или несколько датчиков, которые могут передавать данные 131 датчика на обнаружение 130 объекта посредством коммуникационного интерфейса.
[0054] В качестве альтернативы один или большее количество компонентов системы 100 могут быть реализованы как часть системы 190 организации обслуживания или как часть другой удаленной системы (например, удаленной от автономного транспортного средства или водительского устройства), которая взаимодействует с системой 190 организации обслуживания. Например, система 100 может передавать данные 131 датчика на обнаружение 130 объекта, реализованное в системе 190 организации обслуживания, которая затем обнаруживает, когда объект был помещен в транспортное средство и/или был выгружен из автомобиля. Затем система 190 организации обслуживания может выполнять корректирующие действия, такие как передача уведомлений пользователю, на основании обнаружения.
[0055] Кроме того, в некоторых примерах другие датчики могут использоваться системой 100 для обнаружения наличия и/или удаления объекта из транспортного средства. Например, электромагнитные датчики могут использоваться для обнаружения электронных изделий, таких как сотовые телефоны, планшеты, портативные компьютеры и так далее, или другие современные датчики, такие как хемосенсоры или датчики газовой хроматографии могут быть использованы для обнаружения объектов с использованием запаха (например, продуктов питания, бакалейных товаров и так далее). В одном примере использование электромагнитных датчиков или антенн/беспроводных приемопередатчиков может быть полезным для обнаружения небольших электронных устройств, которые могут быть трудно обнаружимы в транспортном средстве, например, могут упасть или проскользнуть между сиденьями или под сиденьем.
[0056] В другом применении система 100 может также использовать данные датчика, чтобы определить, был ли поврежден салон транспортного средства как в результате езды запрашивающего пользователя в транспортном средстве и/или перевозки объекта пользователя. Система 100 может обнаруживать состояние салона транспортного средства в период времени до начала транспортного обслуживания (например, в ответ на получение инструкций на обслуживание или на заданном расстоянии или расчетном времени удаления от места погрузки пользователя) с использованием датчиков, которые расположены в салоне транспортного средства. Во время завершения транспортного обслуживания (например, транспортное средство близко или прибыло в место назначения) или по его завершению система 100 может в это время снова определить состояние транспортного средства и сравнить информацию с предыдущей информацией о состоянии салона автомобиля. Используя это сравнение, система 100 может обнаружить, пролилось ли что-то на сиденья или пол, были ли разорваны или поцарапаны сиденья и так далее, после транспортного обслуживания. Если обнаружено повреждение, система 100 может предоставить информацию о повреждении системе 190 организации обслуживания и/или устройству пользователя. Система 190 организации обслуживания может потребовать оплату у пользователя и/или дать указания водителю или заставить транспортное средство двигаться к указанному месту для очистки и/или ремонта.
МЕТОДИКА
[0057] Фиг.2 и 3 иллюстрируют примерные способы обнаружения объектов в транспортном средстве в связи с транспортным обслуживанием. Способы, такие как описаны в примерах на фиг.2 и 3, могут быть реализованы с использованием, например, компонентов, описанных в примере на фиг.1. Соответственно, ссылки на элементы на фиг.1 предназначены для иллюстрации подходящего элемента или компонента для выполнения описываемого этапа или части этапа. Для простоты примерный способ из фиг.2 описывается как выполняемый системой 190 организации обслуживания и/или системой 100, работающей на водительском устройстве.
[0058] Обращаясь к фиг. 2, система 190 организации обслуживания может определить, что водитель транспортного средства или AV были выбраны для предоставления обслуживания для запрашивающего пользователя (200). Например, система 190 организации обслуживания может выполнить процесс выбора транспортного средства для выбора транспортного средства на основе местонахождения транспортного средства и места (мест) обслуживания, указанным запрашивающим пользователем. Обслуживание может соответствовать транспортному обслуживанию по доставке объекта или предмета от места погрузки до места назначения или транспортное обслуживание человека (например, пользователя) от места погрузки до места назначения. Система 190 организации обслуживания может передавать соответствующей системе 100 выбранного транспортного средства инструкции по обслуживанию соответствующие обслуживанию, которое должен выполнить водитель или AV. В примере AV система 100 может обрабатывать инструкции по обслуживанию для управления AV, чтобы оно передвигалось из текущего местоположения в место погрузки, в то время как в примере человека-водителя система 100 может обеспечить маршрут или навигационную информацию, которой водитель может следовать, чтобы переместиться к месту погрузки.
[0059] В период времени после того, как система 100 определяет, что водитель или AV должны предоставить обслуживание, система 100 может выполнить обнаружение объекта, используя данные от одного или большего количества датчиков транспортного средства. В одном примере, система 190 организации обслуживания может принять информацию от первого набора датчиков из системы 100 (например, в первый раз) и может обнаружить, что объект был помещен в транспортное средство, на основе первого набора информации (210). Система 100 может получать информацию от датчиков из набора датчиков транспортного средства. Альтернативно, система 100 может обнаружить, что объект был помещен в транспортное средство и предоставить информацию, указывающую такой объект, системе 190 организации обслуживания.
[0060] В зависимости от реализации один или большее количество датчиков или комбинаций датчиков может использоваться системой 100 и/или системой 190 организации обслуживания, чтобы определить, что объект был помещен в средство передвижения. Например, система 100 и/или система 190 организации обслуживания может получать информацию об изображении от набора камер (или радаров, LIDAR, или ультразвуковых датчиков), которые расположены внутри транспортного средства, где камеры расположены так, что соответствующие объективы набора камер обращены внутрь салона транспортного средства (например, к заднему сиденью, переднему сиденью, багажнику или другому отсеку). В другом примере система 100 и/или система 190 организации обслуживания может получать информацию о весе от набора устройств взвешивания, расположенных в отсеке или салоне транспортного средства, где набор устройств позиционируется таким образом, что соответствующая измерительная платформа набора устройств взвешивания расположена на нижней поверхности отсека или салона транспортного средства, ниже нее или совпадает с ней (например, платформа находится на поверхности багажника, чтобы взвешивать объекты, которые помещают в багажник, или на сиденье, чтобы взвесить человека, который сидит на заднем или переднем сиденье). Кроме того, в другом примере система 100 и/или система 190 организации обслуживания могут получать информацию о сжатии из набора датчиков подвески, которые расположены вблизи системы подвески транспортного средства или включены в нее (например расположены вблизи задней и/или передней подвески или рамы транспортного средства). Дополнительно, датчик может также предоставлять информацию о том, был ли открыт и/или закрыт отсек или багажник, что может быть использовано в связи с информацией других датчиков.
[0061] Система 100 и/или система 190 организации обслуживания могут использовать информацию из одного или большего количества этих разных источников, чтобы выполнить операцию обнаружения объекта. Кроме того, на основе первого набора полученной входной информации датчика, система 100 и/или система 190 организации обслуживания может обнаружить, что объект был помещен в транспортное средство, что это за объект (или тип объекта), цвет или объем, размер или вес объекта, то, в каком отсеке находится объект, и/или положение объекта. В соответствии с примером система 190 организации обслуживания может также связывать информацию об объекте с записью транспортного обслуживания о поездке (и/или с профилем пользователя или учетной записью).
[0062] В различных примерах система 100 может запускать датчики для определения данных от датчиков (например, выполнять обнаружение или измерение) на основе информации о местоположении AV. Например, для экономии энергии или мощности, система 100 может запускать датчики для определения данных от датчиков, когда AV достигает или приближается к месту обслуживания, например, прибывает на заранее определенное расстояние или расчетное время движения до места погрузки, и/или, когда AV неподвижен, на период времени нахождения или приближения к месту обслуживания. Альтернативно, в другом примере система 100 может запускать датчики для определения данных от датчиков в ответ на определение того, что обслуживание началось.
[0063] Как показано на фиг.2, система 190 организации обслуживания может также определить, что обслуживание началось (220). В зависимости от реализации система 190 организации обслуживания может определить, что обслуживание началось (i) в ответ на обнаружение того, что пользователь вошел в транспортное средство (например, в ответ на обнаружение объекта в транспортном средстве на этапе 210, или на основе точек данных о местоположении компьютерного устройства пользователя и точек данных о местоположении транспортного средства и определения того, что они находятся в пределах заданного расстояния друг от друга), (ii) в ответ на обнаружение того, что истек заданный период времени (например, десять секунд) с момента обнаружения, что пользователь вошел в транспортное средство, (iii) в ответ на получение от компьютерного устройства пользователя информации, указывающей, что обслуживание может начинаться как результат входного сигнала, предоставляемого на компьютерном устройстве, связанном с пользователем (например, пользователь выбирает функцию, соответствующую началу поездки), (iv) в ответ на получение от водительского устройства (или бортовой компьютерной системы AV), информации, указывающей, что обслуживание может начаться как результат входного сигнала, предоставляемого на водительском устройстве или бортовой компьютерной системе от водителя или пользователя и/или (v) в ответ на определение того, что транспортное средство было размещено на заданном расстоянии от начального местоположения в течение заданного периода времени, на основе информации о местоположении транспортного средства. В других примерах система 100 обнаруживает, что обслуживание началось на основе любого из примеров (i) - (v).
[0064] Система 190 организации обслуживания также наблюдает за обслуживанием, например, за выполнением обслуживания (230) водителем или AV. Как описано в данном документе, наблюдение за обслуживанием может включать в себя периодическое определение местоположения (и соответствующей временной метки) и/или состояния транспортного средства по мере его передвижения из места погрузки в место назначения и сохранение такой информации в записи о поездке, связанной с обслуживанием. Система 100 может предоставить такую информацию в систему 190 организации обслуживания. В некоторых примерах система 190 организации обслуживания может также предоставлять информацию о ходе обслуживания на компьютерное устройство пользователя (или на другое устройство). Например, пользователь может запросить услугу доставки по погрузке багажа в месте нахождения пользователя и разгрузке в месте назначения для друга. Приложение на устройстве пользователя может получать (периодически) информацию о ходе обслуживания, например, местоположении AV и перемещении на карте, от системы 190 организации обслуживания. В дополнение или в качестве альтернативы, пользователь мог предоставить системе 190 организации обслуживания, через приложение, контактную информацию (например, номер телефона или адрес электронной почты) друга, который должен получить пакет. Система 190 организации обслуживания может наблюдать за обслуживанием и обеспечивать обновляемую информацию об обслуживании для друга, чтобы друг мог отслеживать пакет, когда AV передвигается к месту назначения.
[0065] Система 190 организации обслуживания может определить, что обслуживание было завершено, например, в результате наблюдения за обслуживанием (240). В зависимости от реализации система 190 организации обслуживания может определить, что обслуживание завершено (i) в ответ на обнаружение того, что пользователь покинул транспортное средство (например, на основе точек данных о местоположении на компьютерном устройстве пользователя и точек данных местоположения транспортного средства, и определения что они разделены более чем на определенное расстояние), (ii) в ответ на обнаружение того, что истек заданный промежуток времени (например, двадцать секунд) с момента обнаружения того, что пользователь покинул транспортное средство, (iii) в ответ на получение от пользовательского компьютерного устройства информации, указывающей, что обслуживание завершено в результате входного сигнала, предоставляемого в компьютерном устройстве, связанном с пользователем (например, пользователь выбирает функцию, соответствующую окончанию поездки), (iv) в ответ на получение от водительского устройства (или бортовой компьютерной системы AV), информации, указывающей, что обслуживание завершено в результате входного сигнала, предоставленного на водительском устройстве или на бортовой компьютерной системе от водителя или пользователя и/или (v) в ответ на определение того, что транспортное средство было установлено на заданном расстоянии от пункта назначения местоположения в течение заданного промежутка времени на основе информации о местоположении транспортного средства.
[0066] После определения того, что обслуживание было завершено, система 190 организации обслуживания может определить, был ли объект (который ранее был обнаружен в транспортном средстве) удален из транспортного средства, на основании второго набора данных датчиков от одного или большего количества датчиков транспортного средства (например, во второй раз) (250). Например, система 190 организации обслуживания может принимать второй набор данных датчиков от системы 100 и может сравнить первый и второй наборы информации датчиков, чтобы определить, существует ли разница, например, разница в изображении, разница в весе, разница в информации о сжатии и так далее. В качестве альтернативы система 100 может выполнять операцию сравнения и предоставлять указание, был ли объект удален, системе 190 организации обслуживания. Система 100 может запускать датчики для определения данных датчиков (например, выполнять обнаружение или измерение) в определенный момент времени, например, в зависимости от примеров, в ответ на обнаружение того, что обслуживание было завершено или после заданного промежутка времени после обнаружения того, что обслуживание завершено.
[0067] Альтернативно, система 190 организации обслуживания может определить был ли объект удален с транспортного средства до того, как будет определено, что обслуживание завершено. Например, система 190 организации обслуживания (или система 100) может выполнять процесс обнаружения объекта в ответ на определение того, что AV достигло или близко к месту назначения и/или было неподвижно в течение времени, пока находилось в месте назначения или вблизи него. В другом примере система 190 организации обслуживания может определить, что обслуживание было завершено в ответ на обнаружение того, что объект был удален из транспортного средства (например, после выполнения этапа 250).
[0068] Если система 190 организации обслуживания определяет, что объект был удален из транспортного средства, она может определить, что не требуется выполнять никакого корректирующего действия, так как пользователь в транспортном средстве забрал объект с ним или с ней, или другой пользователь удалил объект (например, в месте назначения доставки) (270). С другой стороны, если система 190 организации обслуживания определяет, что объект не был удален, система 190 организации обслуживания может автоматически выполнять одно или большее количество корректирующих действий (260). Например, система 190 организации обслуживания может послать сообщение водителю и/или пользователю, через соответствующие приложения на водительском устройстве и/или устройстве пользователя, чтобы информировать их об утерянном объекте. Сообщение может включать в себя инструкции (например, включая навигационные инструкции), чтобы позволить водителю и пользователю встретиться, например, в месте назначения, чтобы пользователь мог вернуть себе объект.
[0069] В другом примере система 190 организации обслуживания может передать сообщение или уведомление пользовательскому устройству и позволить пользователю запросить доставку объекта в место, указанное пользователем. Кроме того, в одном примере, если транспортное средство является AV, система 190 организации обслуживания может передать инструкции по управлению транспортным средством в AV, чтобы заставить AV передвигаться в указанное место. Такое указанное место может соответствовать новому месту встречи (место доставки для выгрузки) для пользователя, указанного в пользовательском запросе последующей доставки службе транспортного обслуживания, или назначенному хранилищу или месту склада для размещения утерянных объектов. Система 190 организации обслуживания также может сообщить устройству пользователя о предоставлении такой информации о местоположении, где пользователь может вернуть себе объект.
[0070] Фиг.3 иллюстрирует другой примерный способ обнаружения объектов в транспортном средстве в связи с транспортным обслуживанием. В одном примере один или большее количество этапов способа, описанного на фиг.3, может выполняться одновременно с одним или большим количеством этапов способа, описанного на фиг.2. Для простоты, в качестве выполняемого системой 100, действующей на бортовой компьютерной системе автономного транспортного средства, описывается примерный способ, показанный на фиг.3.
[0071] На фиг.3, система 100 (при действии с AV) может получать инструкции по обслуживанию от системы 190 организации обслуживания для того, чтобы AV предоставило обслуживание для запрашивающего пользователя (300). Как описано в данном документе, обслуживание может иметь начальное местоположение и место назначения и может соответствовать доставке объекта или человека (например, запрашивающего пользователя). Система 100 может обрабатывать инструкции по обслуживанию, чтобы определить, какое обслуживание предоставлять, куда передвигаться (например, от текущего местоположения до места начала/погрузки, затем к месту назначения) и как туда передвигаться (например, маршрут перевозки).
[0072] На основании инструкций по обслуживанию, данных карты и/или данных датчиков, используемых для действия AV (например, данных от датчиков, установленных на корпусе AV), система 100 может управлять AV для передвижения к исходному местоположению и одновременно контролирует перемещение AV (310). Система 100 может соответствовать системе управления AV, включать ее в себя или поддерживать связь с ней, чтобы управлять действием AV, посылая управляющие сигналы для управляющих модулей различных подсистем транспортного средства, в ответ на получение данных от датчиков и сигналов обратной связи от различных компонентов транспортного средства. Система 100 также может определять местоположение AV, например, по данным GPS, и контролировать текущую позицию по сравнению с маршрутом и/или начальным местоположением. Используя периодически определяемое текущее местоположение AV, система 100 может определять, когда AV достигает или находится на заданном расстоянии от начального местоположения (например, AV близко к начальному местоположению). В одном примере, когда система 100 определяет, что AV находится вблизи начального местоположения, система 100 может изменять состояние AV (от состояния «на маршруте» на состояние «прибывает/прибыло»).
[0073] В период времени после определения того, что AV близко к начальному местоположению, система 100 может выполнять процесс обнаружения объекта для обнаружения того, что объект помещен в AV (320). В зависимости от реализации, система 100 может периодически выполнять процесс обнаружения объекта, как описано на фиг.1 и 2, от того момента, как было определено, что AV находится близко к начальному местоположению, до момента, когда AV начинает передвигаться к месту назначения. В одном примере система 100 может выполнять процесс обнаружения объекта в ответ на определение того, что обслуживание было запущено или может выполнять процесс обнаружения объекта до или одновременно с определением того, что обслуживание началось. В примере на фиг.3, система 100 может обнаружить, что объект (например, ящик) был помещен на заднее сиденье AV по информации датчика, полученной от AV, как описано на фиг.1 и 2.
[0074] После начала обслуживания система 100 может управлять AV для передвижения в место назначения, а также контролировать транспортное средство и/или ход обслуживания (330). Подобно тому, как описано выше, система 100 может определять местоположение AV по данным GPS и контролировать текущее положение по сравнению с маршрутом и/или местом назначения. Система 100 может определить, когда AV достигнет или будет находиться на заданном расстоянии от места назначения (например, AV вблизи места назначения) (340). В промежуток времени, после определения того, что АВ вблизи места назначения, система 100 может выполнять процесс обнаружения объекта, чтобы определить, был ли объект удален из AV (350). В зависимости от реализации, этап 350 может выполняться до, после или при определении того, что обслуживание было завершено.
[0075] Если система 100 определяет, что объект был удален из AV, система 100 может определить, что нет необходимости выполнять какое-либо корректирующие действие (370). С другой стороны, если система 100 определяет, что объект все еще присутствует в транспортном средстве, система 100 может выполнять одно или большее количество корректирующих действий и/или заставить систему 190 организации обслуживания выполнить одно или большее количество корректирующих действий, как описано на фиг.1 и 2 (360).
[0076] На фиг.4А-4D показаны примеры пользовательских интерфейсов, отображаемых на мобильном компьютерном устройстве в различных примерах использования. Для каждого из примеров, показанных на фиг. 4A-4D, отдельный пользовательский интерфейс может отображаться на пользовательском устройстве пользователя, который оставил объект в транспортном средстве при транспортном обслуживании пользователя. В зависимости от реализации, пользовательский интерфейс может отображаться как часть назначенного приложения, связанного с системой 190 организации обслуживания или как часть другого приложения, работающего на пользовательском устройстве (например, приложение электронной почты, приложения текстовых сообщений, приложение веб-браузера и так далее). В одном примере на пользовательском устройстве может отображаться уведомление, и выбор функции или уведомления может привести к тому, что на пользовательском устройстве будет отображаться пользовательский интерфейс.
[0077] Как показано на фиг.4А, в одном примере пользовательское устройство может принимать уведомление или сообщение от системы 190 организации обслуживания или системы 100 после (или, в некоторых случаях, непосредственно перед тем как) обслуживание закончилось. Приложение, запущенное на пользовательском устройстве, может отображать пользовательский интерфейс 400, который включает в себя содержимое 405 изображения объекта и текстовое содержимое 410, напоминающее пользователю и/или уведомляющее пользователя о том, что объект был оставлен в транспортном средстве. Содержимое 405 изображения может быть сформировано из информации об изображении от одного или большего количества датчиков (например, камер) транспортного средства. В качестве альтернативы, если в транспортном средстве камера не используется, другое содержимое, представляющее объект, может отображаться вместо содержимого 405 изображения, такое как дополнительное текстовое содержимое или другая графика или допустимые изображения, представляющие объект. В этом примере текстовое содержимое 410 также предоставляет контактную информацию для пользователя для передачи сообщения, чтобы определить, что делать, чтобы найти объект.
[0078] В примере на фиг.4В на пользовательском устройстве может отображаться пользовательский интерфейс 420. Пользовательский интерфейс 420 также может включать в себя содержимое 425 изображения, как описано на фиг.4A, и текстовое содержимое 430, уведомляющее пользователя о том, что объект был оставлен в транспортном средстве, и информирующее пользователя о конкретном месте, в котором можно забрать объект. Например, система 190 организации обслуживания может дать указание AV или водителю двигаться в определенное место (или остаться в месте назначения или месте, где пользователь был выгружен). Система 190 организации обслуживания позиционирования может сформировать текстовое содержимое 430 с включением соответствующего содержимого о местоположении. На фиг.4B, текстовое содержимое 430 информирует пользователя о том, что транспортное средство с объектом будет ждать еще 2 минуты (или какой-либо другой заданный промежуток времени), где пользователь был выгружен.
[0079] В соответствии с другим примером пользовательский интерфейс 440, показанный на фиг.4C, может отображаться на пользовательском устройстве в виде интерактивного приглашения. Такое приглашение на уведомление может быть включено в приложение (например, отображаться как часть приложения пользовательского интерфейса) или быть вне приложения (например, отображаться, когда приложение не открыто, и используя собственные функции уведомления пользовательского интерфейса операционной системы мобильного устройства). В этом примере пользовательский интерфейс 440 включает в себя текстовое содержимое 445, которое включает в себя конкретное местоположение, в котором объект пользователя будет храниться или удерживаться. Текстовое содержание 445 может включать в себя информацию о местоположении (например, адрес или пересечение улиц), время или период времени, когда пользователь может забрать объект (например, «рабочее время» или «с 8 утра до 6 вечера») и выбираемую функцию 450, которую пользователь может выбрать для запроса транспортного обслуживания в указанном месте. Если пользователь выбирает выбираемую функцию («Запрос» или «Запрос на поездку») 450, приложение назначенного обслуживания можно открыть или запустить на пользовательском устройстве, чтобы пользователь мог подтвердить транспортное обслуживание в указанном месте (например, из текущего местоположения пользователя или из указанного места погрузки). В качестве альтернативы, если пользователь выбирает избираемую функцию 450, приложение назначенного обслуживания может автоматически сформировать и передать запрос для транспортного обслуживания на систему 190 организации обслуживания. Запрос может включать в себя тип услуги (например, транспортировка пользователя), место погрузки (например, текущее местоположение пользовательского устройства, определенное через GPS приемник пользовательского устройства) и место назначения (например, Мэйн стрит, 123).
[0080] В другом примере, таком как проиллюстрированный на фиг.4D, пользовательский интерфейс 460 может включать в себя текстовое содержимое 465, чтобы информировать пользователя о том, что пользователь может запросить доставку объекта пользователя. Пользовательский интерфейс 460 может позволить пользователю выбрать избираемую функцию 470 для запроса услуги транспортной доставки объекта пользователя к текущему местоположению пользователя. Так же, как на примере фиг.4C, если пользователь выбирает избираемую функцию 470, приложение назначенного обслуживания может быть открыто или запущено на пользовательском устройстве, так что пользователь может подтвердить услугу по транспортной доставке объекта пользователя в указанное место (например, из текущего местоположения пользователя или из указанного места погрузки), или приложение назначенного обслуживания может автоматически сформировать и передать запрос на услугу по транспортной доставке системе 190 организации обслуживания. В последнем примере запрос может включать в себя тип услуги (например, доставка объекта конкретным транспортным средством, в котором находится объект пользователя), и место выгрузки или назначения (например, текущее местоположение пользовательского устройства, определенное через GPS-приемник пользовательского устройства). Как показано на фиг.1, например, система 190 организации обслуживания может идентифицировать конкретное транспортное средство, которое пользователь только что использовал или транспортного средства, которое связано с записью о поездке, имеющей идентифицированный объект, и выбрать это транспортное средство для движения к текущему местоположению пользователя.
[0081] В соответствии с некоторыми примерами пользовательский интерфейс, описанный на любой из фиг.4A-4D, также может содержать подробную информацию об объекте, например, что представляет собой объект (в том числе цвет или форма), тип объекта, размеры и/или вес объекта, где был размещен объект и так далее.
Хотя примеры на фиг.4А-4D описаны в отношении пользовательского устройства, в некоторых вариантах такие пользовательские интерфейсы могут отображаться также на водительском устройстве для информирования водителя об объекте, который был оставлен в его или ее транспортном средстве. Такой пользовательский интерфейс может проинструктировать водителя, куда двигаться, где ожидать (и/или как долго) и/или с кем встречаться, чтобы пользователь мог получить объект.
АППАРАТНЫЕ схемы
[0082] На фиг. 5 представлена блок-схема, которая иллюстрирует компьютерное устройство, посредством которого могут быть реализованы описанные здесь варианты осуществления. В одном примере компьютерное устройство 500 может соответствовать мобильному компьютерному устройству, такому как сотовое устройство, способное обеспечивать телефонную связь, обмен сообщениями и данными. Компьютерное устройство 500 может соответствовать пользовательскому устройству или водительскому устройству. Примеры таких устройств включают в себя смартфоны, мобильные телефоны или планшетные устройства для сотовых операторов. Компьютерное устройство 500 включает в себя процессор 510, ресурсы памяти 520, устройство 530 отображения (например, сенсорное дисплейное устройство), одну или большее количество подсистем 540 связи (включая беспроводные коммуникационные подсистемы), механизмы 550 ввода (например, механизм ввода может включать в себя или быть частью сенсорного дисплейного устройства) и один или большее количество датчиков 560, включая механизм определения местоположения (например, GPS-приемник). В одном примере, по меньшей мере, одна из подсистем 540 связи посылает и принимает сотовые данные по каналам данных и голосовым каналам. Коммуникационные подсистемы 540 могут включать в себя сотовый приемопередатчик и один или большее количество беспроводных приемопередатчиков малого радиуса действия. Ресурсы 510 обработки могут принимать сообщения от системы организации обслуживания, например, через коммуникационные подсистемы 540.
[0083] В примере на фиг.5, компьютерное устройство 500 может соответствовать водительскому устройству, которое управляется водителем транспортного средства. Процессор 510 может предоставлять разнообразное содержимое на дисплей 530, исполняя инструкции, хранящиеся в ресурсах 520 памяти. Ресурсы 520 памяти могут хранить инструкции, соответствующие, например, водительскому приложению 525, и другие данные, такие как одна или большее количество записей 527 о поездке, один или большее количество параметров или баз данных точек данных о местоположении. Например, процессор 510 конфигурируется программным обеспечением и/или другой логикой для выполнения одного или большего количества процессов, этапов и других функций, описанных в реализациях, как показано на чертежах с фиг.1 по фиг.4D и раскрыто в других частях заявки. В частности, процессор 510 может исполнять команды и данные, хранящиеся в ресурсах 520 памяти, чтобы получать уведомления о транспортном обслуживании, которое водитель должен предоставить, и в связи с транспортным обслуживанием может использовать данные 565 датчиков для выполнения процессов обнаружения объектов. Датчики 560, представленные в данном документе, могут включать в себя датчик, включенный в состав компьютерного устройства 500 (например, GPS-приемник), а также интерфейсы датчиков, которые взаимодействуют с одним или большим количеством датчиков транспортного средства (например, ультразвуковыми датчиками, взвешивающими устройствами и т. д.). Процессор 510 может также исполнять команды, соответствующие водительскому приложению 525, чтобы вызвать различные пользовательские интерфейсы 515 для отображения на дисплее 530, например, приглашение предоставить транспортное обслуживание, навигационную информацию или уведомления о пользователе, оставившем объект в транспортном средстве водителя. Дополнительно, пользовательские интерфейсы 515 могут включать в себя избираемые функции, которые может выбрать водитель, посредством пользовательского ввода 555 через механизмы 550 ввода (например, в сочетании с сенсорным дисплеем 530), чтобы взаимодействовать с водительским приложением 525, например, чтобы указать, в некоторых примерах, когда транспортное обслуживание началось или завершилось.
[0084] Хотя на фиг.5 приведена иллюстрация для мобильного компьютерного устройства, один или большее количество примеров могут быть реализованы на других типах устройств, в том числе, полнофункциональных компьютерах, таких как ноутбуки и настольные компьютеры (например, ПК). В другом примере, вариант фиг.5 может иллюстрировать (по меньшей мере часть) бортовой компьютерной системы AV, такой, как описанная на фиг.1.
[0085] На фиг.6 приведена блок-схема, иллюстрирующая компьютерную систему, на которой могут быть реализованы описанные здесь примеры. Например, в контексте фиг.1, система 190 организации обслуживания может быть реализована с использованием такой компьютерной системы, как описанная на фиг.6. Система 190 организации обслуживания также может быть реализована с использованием комбинации несколько компьютерных систем, как описано на фиг.6.
[0086] В одной реализации компьютерная система 600 включает в себя ресурсы обработки, такие как один или большее количество процессоров 610, основную память 620, постоянное запоминающее устройство (ROM) 630, устройство 640 хранения и коммуникационный интерфейс 650. Компьютерная система 600 включает в себя по меньшей мере один процессор 610 для обработки информации и основную память 620, такую как оперативное запоминающее устройство (RAM) или другое устройство динамического хранения для сохранения информации и инструкций, которые должны выполняться процессором 610. Основная память 620 также может использоваться для хранения временных переменных или другой промежуточной информации во время исполнения инструкций, которые должны исполняться процессором 610. Компьютерная система 600 также может включать в себя ROM 630 или другое статическое устройство хранения для сохранения статической информации и инструкций для процессора 610. Устройство 640 хранения, такое как магнитный диск или оптический диск, предназначено для хранения информации и инструкций. Например, устройство 640 хранения может соответствовать машиночитаемому носителю, который хранит инструкции 642 по определению местоположения и инструкции 644 по обнаружению объектов для выполнения операций, описанных в отношении фиг.1-5. В таких примерах компьютерная система 600 может определять местоположения транспортных средств, определять места обслуживания при транспортном обслуживании и выполнять процессы обнаружения объектов на основе данных датчиков, полученных от систем транспортного средства или водительских устройств. Дополнительно, устройство 640 хранения может включать в себя другие инструкции, такие как инструкции для реализации диспетчерской подсистемы, которая получает запросы на транспортное обслуживание от запрашивающих пользователей и выбирает транспортные средства для предоставления этих транспортных услуг.
[0087] Коммуникационный интерфейс 650 может позволить компьютерной системе 600 связываться с одной или большим количеством сетей 680 (например, сотовой сетью) посредством использования сетевого канала связи (беспроводного или проводного). С помощью сетевого канала связи компьютерная система 600 может связываться с множеством таких устройств, как мобильные компьютерные устройства пассажиров и водителей. В соответствии с некоторыми примерами, используя интерфейс 650 связи, компьютерная система 600 может получать информацию 652 о местоположении от водительских устройств, AV и/или пользовательских устройств и может передавать уведомительные сообщения 654 на пользовательские устройства для информирования пользователей о том, что вещи пользователя были оставлены в транспортном средстве, как описано в некоторых примерах на фиг. 1-5.
[0088] Компьютерная система 600 также может включать в себя устройство 660 отображения, такое как электронно-лучевая трубка (ЭЛТ), ЖК-монитор или телевизор, например, для отображения графики и информации для пользователя. Механизм 670 ввода, такой как клавиатура, которая включает буквенно-цифровые клавиши и другие клавиши, может быть связан с компьютерной системой 600 для передачи информации и команд в процессор 610. Другие не ограничивающие иллюстративные примеры механизмов 670 ввода включают в себя мышь, трекбол, сенсорный экран или клавиши направления курсора для передачи информации о направлении и команд в процессор 610 и для управления перемещением курсора на дисплее 660.
[0089] Описанные в данном документе примеры относятся к использованию компьютерной системы 600 для реализации описанных в данном документе методов. В соответствии с одним примером, эти методы выполняются компьютерной системой 600 в ответ на выполнение процессором 610 одной или большего количества последовательностей одной или большего количества инструкций, содержащихся в основной памяти 620. Такие инструкции могут быть считаны в основную память 620 с другого машиночитаемого носителя, такого как устройство 640 хранения. Исполнение последовательностей инструкций, содержащихся в основной памяти 620, заставляет процессор 610 выполнять описанные в данном документе этапы процесса. В альтернативных вариантах, проводные электрические схемы могут использоваться вместо или в сочетании с программными инструкциями для реализации примеров, описанных в данном документе. Таким образом, описанные примеры не ограничены какой-либо конкретной комбинацией аппаратных схем и программного обеспечения.
[0090] Предполагается, что примеры, описанные в данном документе, распространяются на отдельные элементы и концепции, описанные в данном документе, независимо от других концепций, идей или систем, а также примеров, включающих комбинации элементов, перечисленных в любом месте этой заявки. Хотя в данном документе подробно описаны примеры со ссылкой на прилагаемые чертежи, очевидно, что идея изобретения не ограничена именно этими примерами. Соответственно, предусматривается, что объем правовой охраны изобретения определяется нижеследующей формулой изобретения и ее эквивалентами. Кроме того, предполагается, что конкретные признаки, описанные либо отдельно, либо как часть примера, могут быть совмещены с другими отдельно описанными признаками или частями других примеров, даже если другие признаки и примеры не упомянуты особо. Таким образом, отсутствие описания комбинаций не должно исключать наличия прав на такие комбинации.
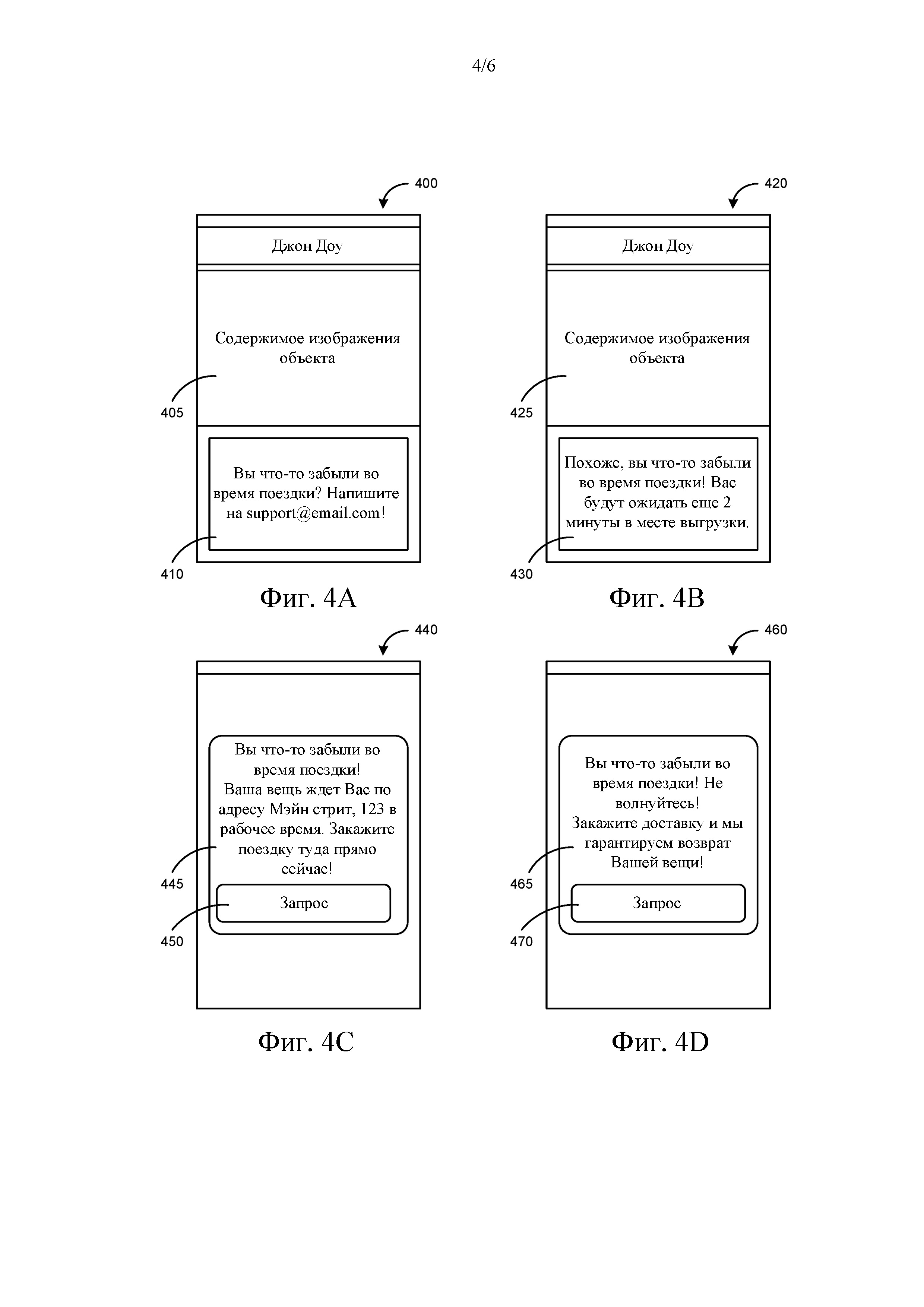

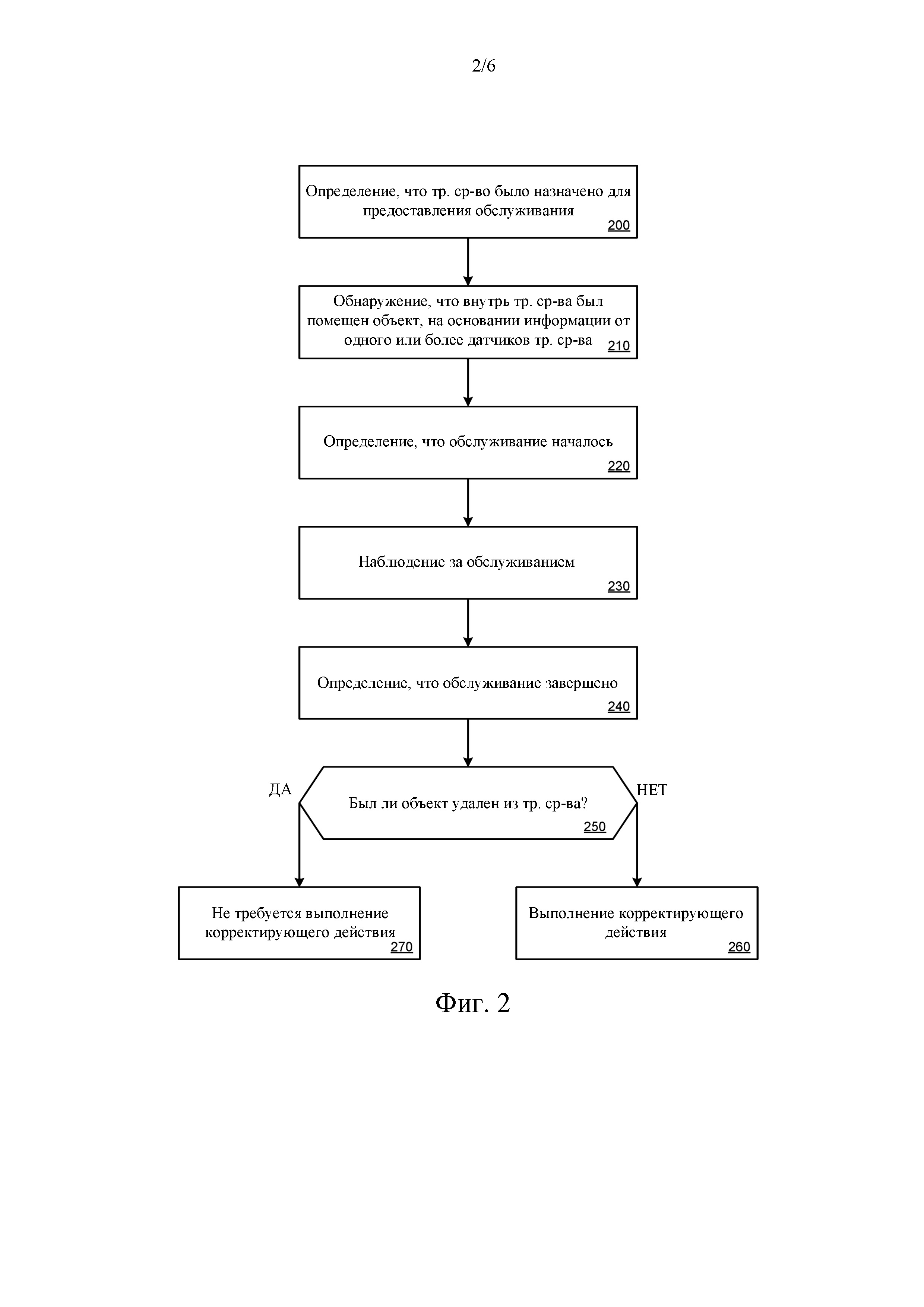
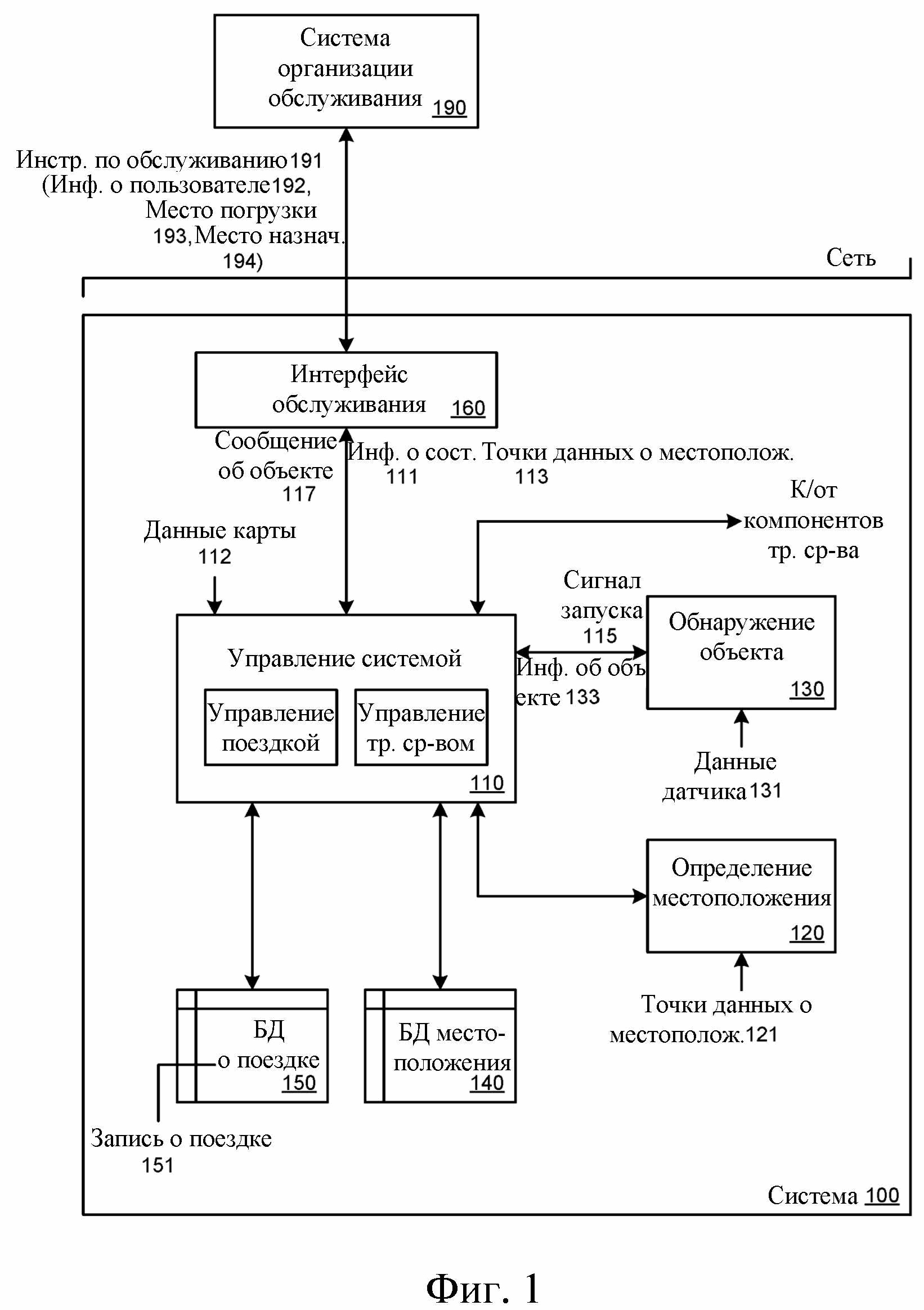
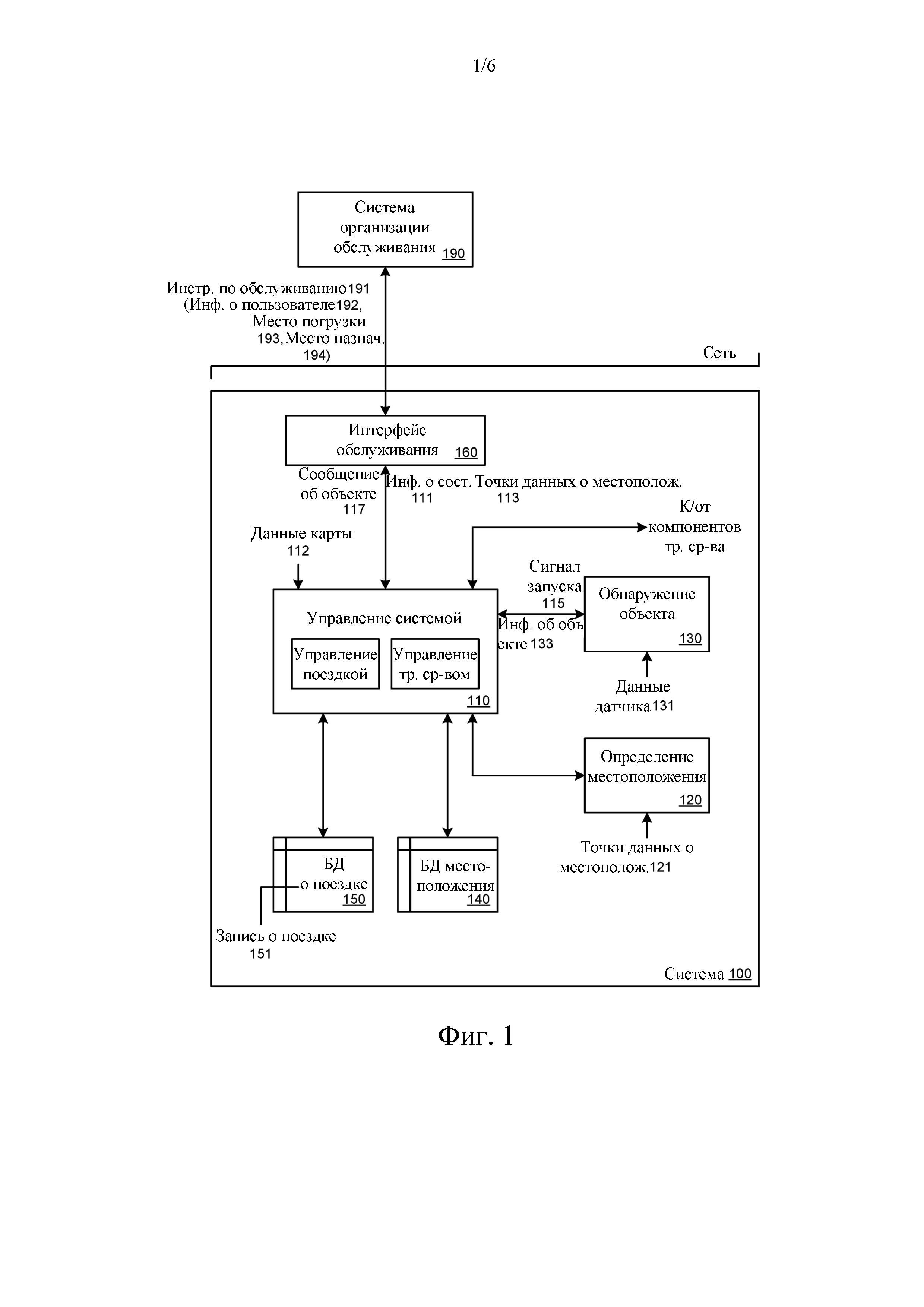
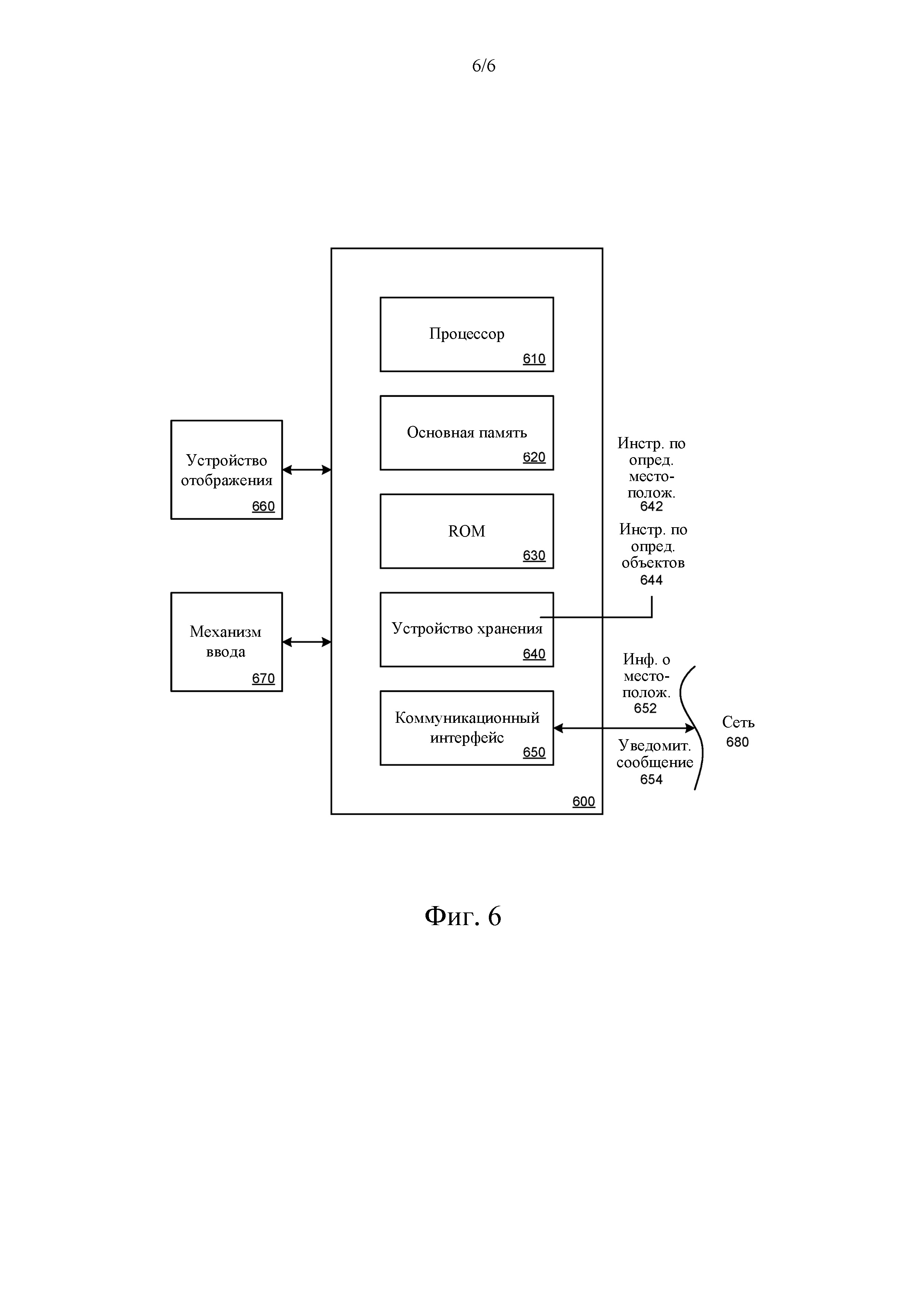
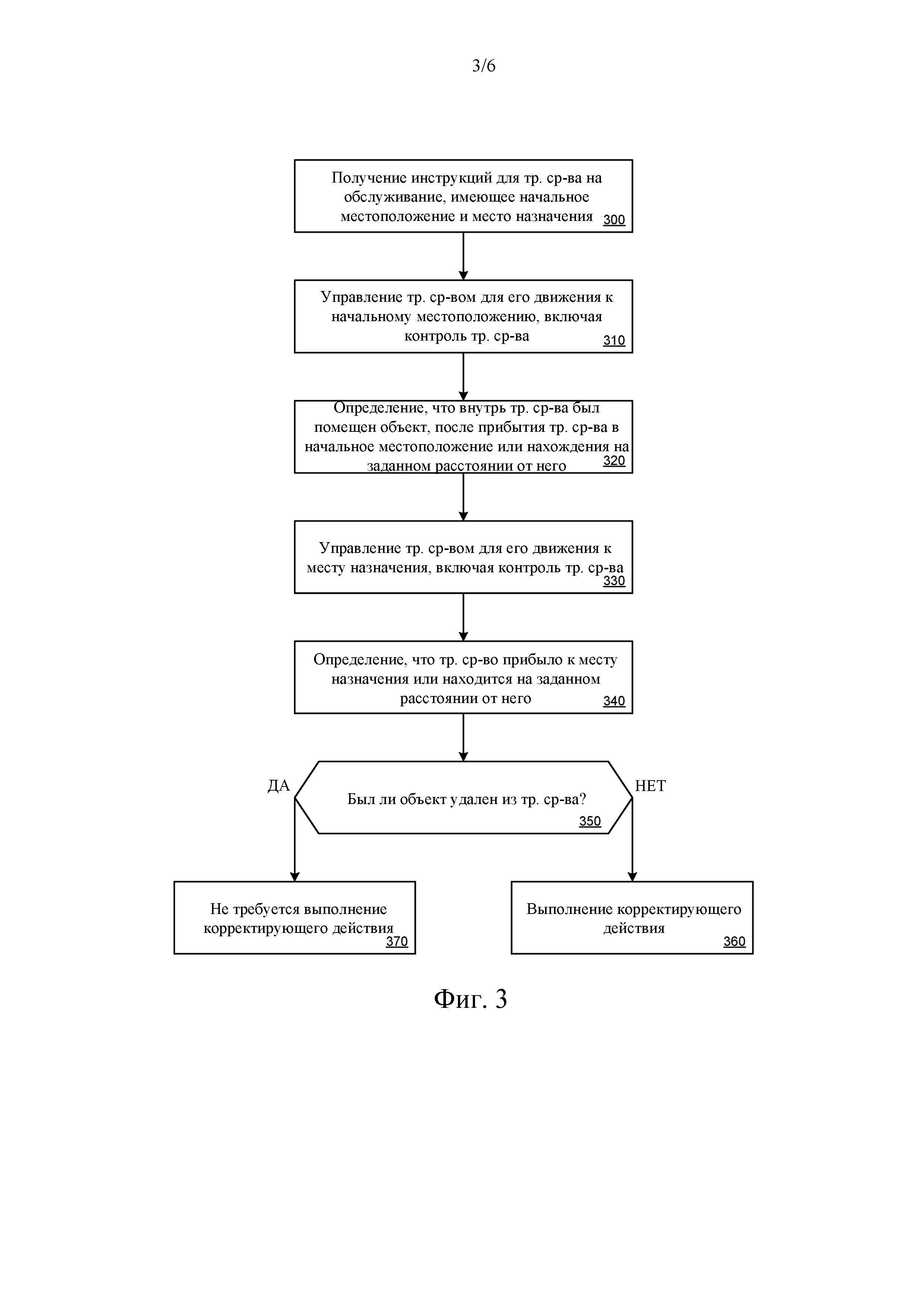
Автономное транспортное средство с поддержкой направления

