Результат интеллектуальной деятельности: СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА
Вид РИД
Изобретение
Область техники
[0001] Настоящее изобретение относится к способам управления движением транспортных средств и устройствам управления движением транспортных средств.
УРОВЕНЬ ТЕХНИКИ
[0002] Был раскрыт традиционный метод, в котором в случае, когда транспортное средство приближается к системе автоматической оплаты проезда, ETC (зарегистрированный товарный знак), выполняют управление скоростью, а в случае, когда транспортное средство приближается к пункту оплаты с человеком-оператором, пользователь уведомляется об отключении управления скоростью.
СПИСОК ЦИТИРУЕМОЙ ЛИТЕРАТУРЫ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003] Патентный документ 1: публикация заявки на патент Японии № 2004–355145.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004] Вышеупомянутый метод основан на том предположении, что после уведомления водитель останавливает транспортное средство у пункта оплаты с человеком-оператором, потому что водитель уведомлен об отключении управления скоростью. Следовательно, если водитель не останавливает транспортное средство во время работы, транспортное средство может двигаться по своей инерции и проехать пункт оплаты с человеком-оператором.
[0005] Настоящее изобретение было создано с учетом вышеупомянутой проблемы, и его задача состоит в том, чтобы предоставить способ управления движением транспортного средства и устройство управления движением транспортного средства, которые позволяют предотвращать проезд транспортного средства мимо предусмотренного на полосе движения пункта взимания платы.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006] Способ управления движением транспортного средства в соответствии с одним аспектом настоящего изобретения включает в себя, после того, как определено, что транспортное средство собирается въехать на полосу движения, на которой предусмотрен пункт взимания платы, остановку транспортного средства в положении перед пунктом взимания платы в направлении движения транспортного средства.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0007] Настоящее изобретение позволяет предотвратить проезд транспортного средства мимо пункта взимания платы, предусмотренного на полосе движения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
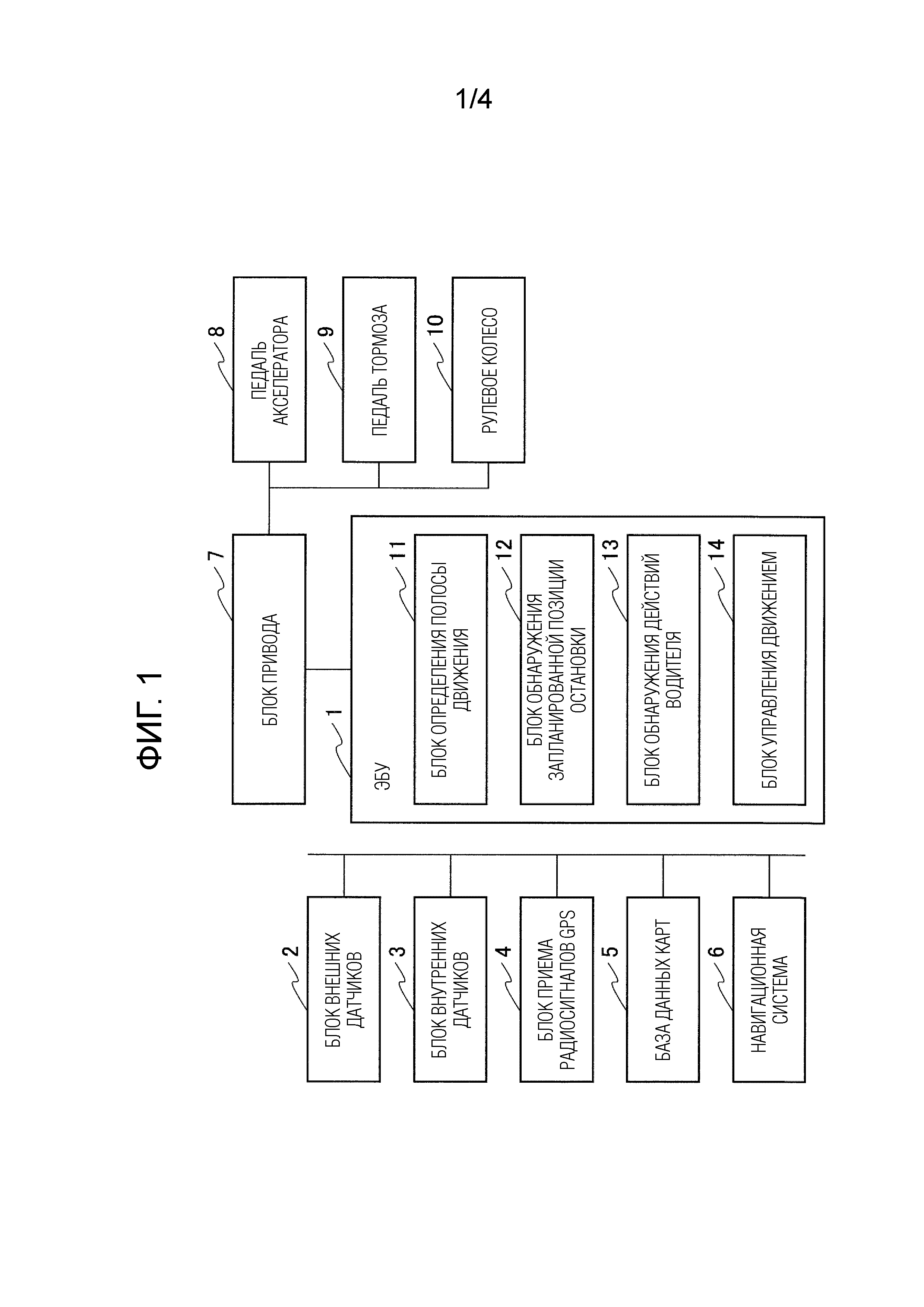
[0008] [Фиг. 1] Фиг. 1 является функциональной блок–схемой, иллюстрирующей часть транспортного средства, оборудованного устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
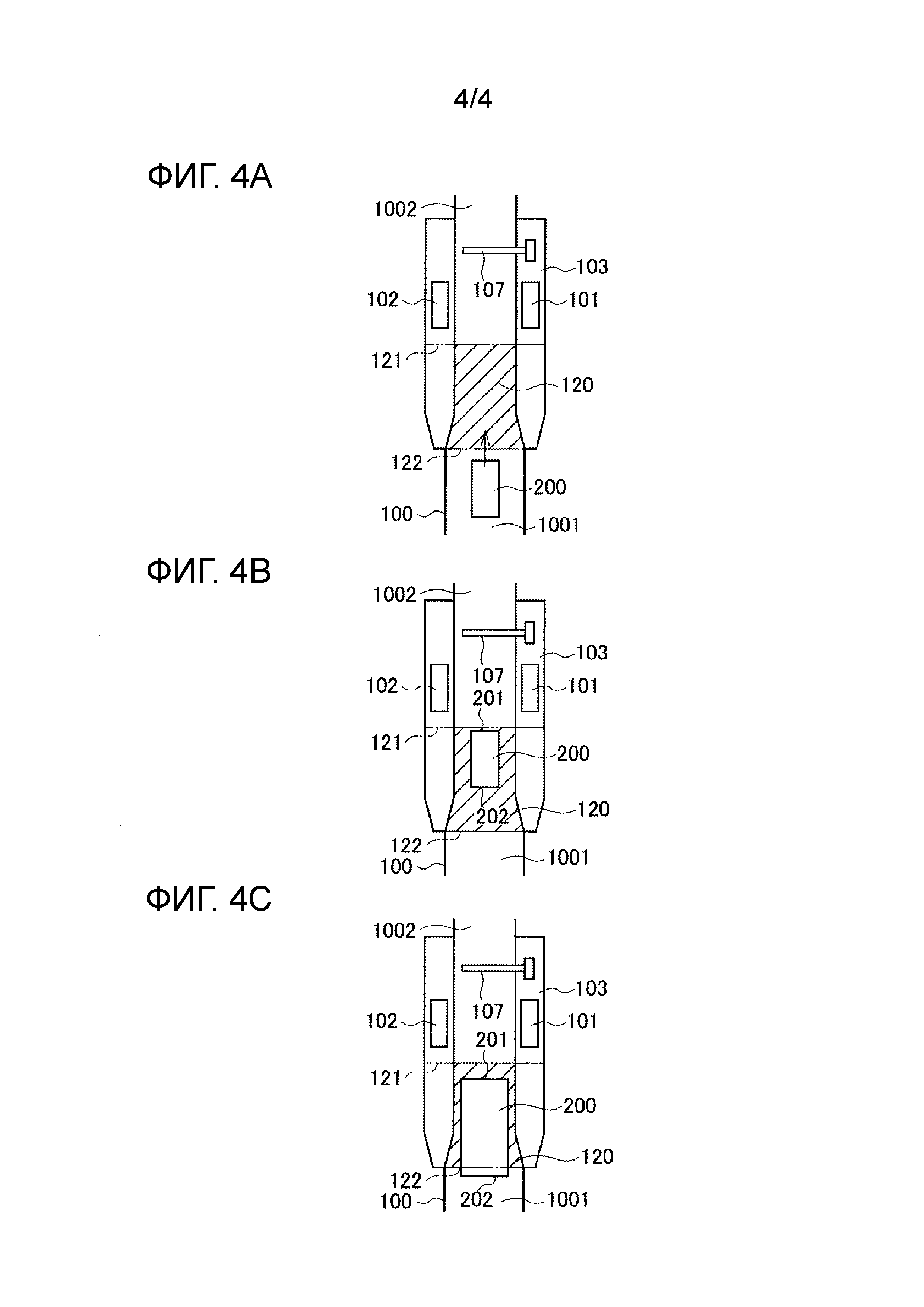
[Фиг. 2] Фиг. 2 – блок–схема последовательности операций, поясняющая способ управления движением транспортного средства, выполняемый ЭБУ 1.
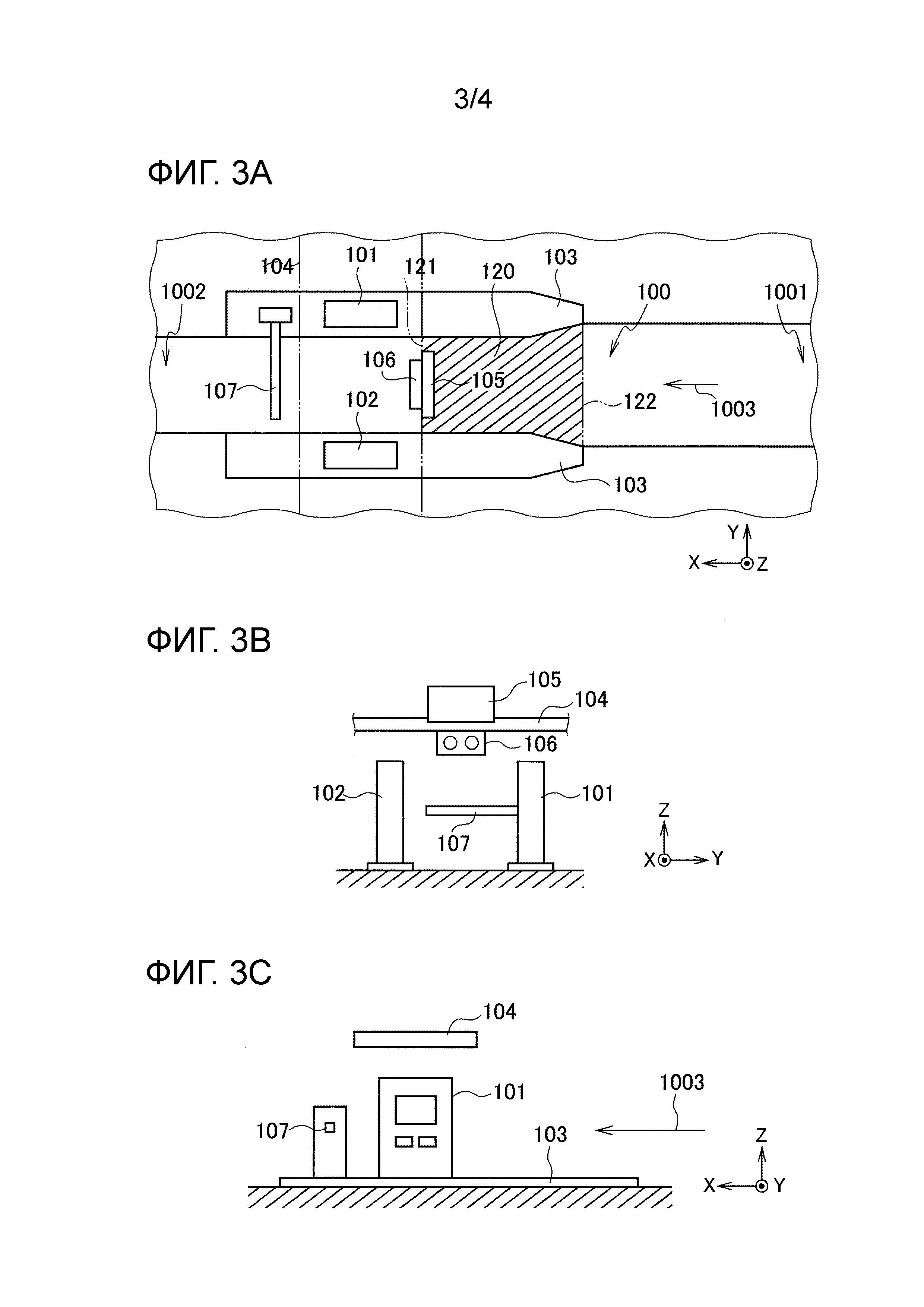
[Фиг. 3A] Фиг. 3A – вид сверху примера конструкции полосы движения с пунктом ручной оплаты и запланированной позицией остановки.
[Фиг. 3B] Фиг. 3B – вид спереди примера конструкции полосы движения с пунктом ручной оплаты.
[Фиг. 3C] Фиг. 3C – вид сбоку примера конструкции полосы движения с пунктом ручной оплаты.
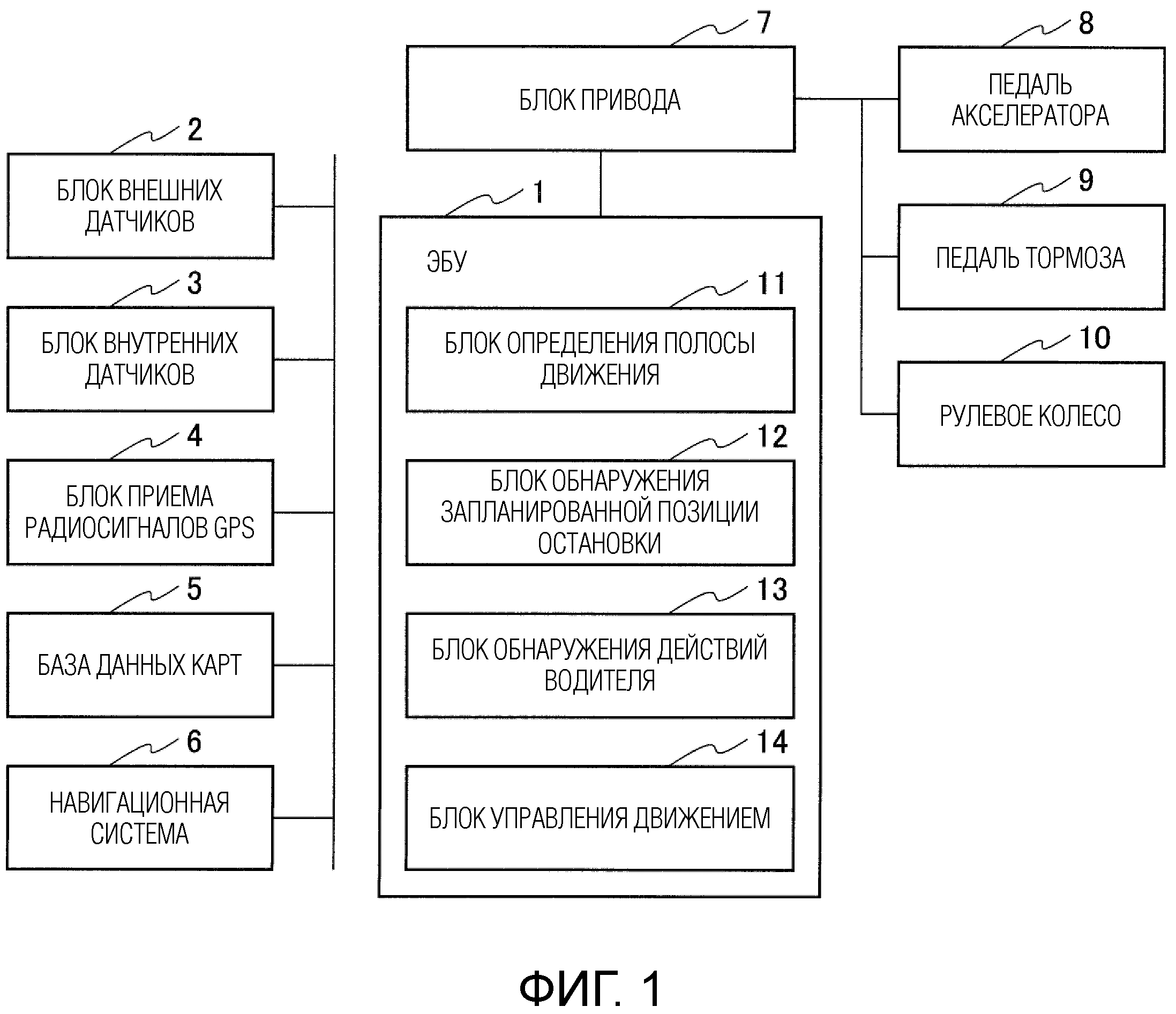
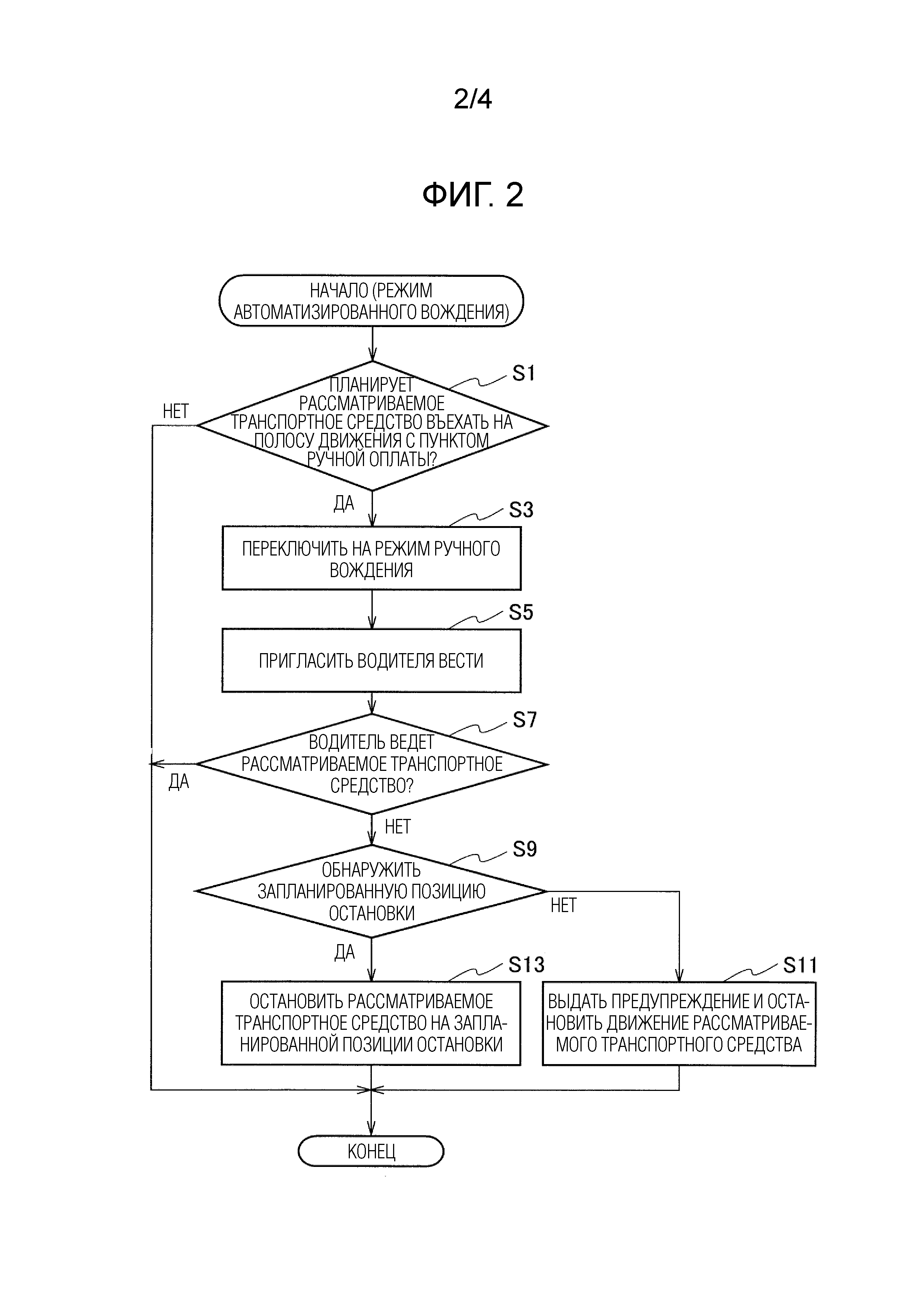
[Фиг. 4A] Фиг. 4A – вид сверху примера состояния, когда транспортное средство приближается к запланированной позиции остановки.
[Фиг. 4B] Фиг. 4B – вид сверху примера состояния, когда транспортное средство остановилось на запланированной позиции остановки.
[Фиг. 4C] Фиг. 4C – вид сверху другого примера состояния, когда транспортное средство остановилось на запланированной позиции остановки.
Описание вариантов осуществления
[0009] Далее будет подробно описан вариант осуществления настоящего изобретения со ссылкой на чертежи. В описании одинаковые составляющие будут обозначены одинаковыми символами, а их повторное описание будет опущено.
[0010] Как показано на фиг. 1, транспортное средство включает в себя электронный блок управления (ЭБУ) 1, блок 2 внешних датчиков, блок 3 внутренних датчиков, блок 4 приема радиосигналов глобальной системы позиционирования (GPS), базу 5 данных карт, навигационную систему 6, блок 7 привода, педаль 8 акселератора, педаль 9 тормоза и рулевое колесо 10. Это транспортное средство называют «рассматриваемым транспортным средством» («транспортным средством-хозяином»), чтобы предотвратить путаницу этого транспортного средства с другими транспортными средствами.
[0011] ЭБУ 1 соответствует устройству управления движением транспортного средства, которое автоматически останавливает рассматриваемое транспортное средство и может быть реализовано с использованием микрокомпьютера, включающего в себя центральный процессор (ЦП), память и блок ввода–вывода. Компьютерная программа, которая заставляет микрокомпьютер функционировать как ЭБУ 1, устанавливается на микрокомпьютер и исполняется им. Это позволяет микрокомпьютеру функционировать в качестве ЭБУ 1. Следует отметить, что хотя здесь будет описан пример, в котором ЭБУ 1 реализован с помощью программного обеспечения, само собой разумеется, что ЭБУ 1 может быть реализован с помощью специального аппаратного обеспечения, подготовленного к выполнению каждого информационного процесса, который будет описан ниже.
[0012] Блок 2 внешних датчиков включает в себя радиолокационное устройство или камеру (оба не показаны) и выводит в ЭБУ 1 изображения или информацию о местоположении объектов вокруг рассматриваемого транспортного средства, полученную от радиолокационного устройства или камеры. Камера также обнаруживает полосы движения. Блок 3 внутренних датчиков обнаруживает величину срабатывания педали 8 акселератора (приводное усилие), величину срабатывания педали 9 тормоза (тормозное усилие) и угол поворота рулевого колеса 10 (величину рулевого управления) и выводит результаты такого обнаружения в ЭБУ 1.
[0013] Блок 4 приема радиосигналов GPS получает положение рассматриваемого транспортного средства, принимая радиоволны от трех или более спутников GPS, и выводит это положение в ЭБУ 1 и навигационную систему 6.
[0014] База 5 данных карт включает в себя картографическую информацию о тех областях, где движется рассматриваемое транспортное средство, и ЭБУ 1 и навигационная система 6 обращаются к этой картографической информации. Картографическая информация включает в себя информацию о расположении и т. п. дорог, перекрестков и пунктов взимания платы, предусмотренных на платных дорогах.
[0015] Информация о пунктах взимания платы включает информацию о полосах движения, снабженных «пунктом автоматической оплаты», на котором транспортное средство может передавать или получать плату и билеты по беспроводной связи между транспортным средством и дорогой без остановки (полоса движения с пунктом автоматической оплаты) и информацию о полосах движения, снабженных «пунктом ручной оплаты», у которых транспортное средство временно останавливается, чтобы находящиеся в транспортных средствах лица могли передать или получить плату и билеты (полоса движения с пунктом ручной оплаты). Здесь, как описано выше, полосы движения, на которых пункт автоматической оплаты не предусмотрен, называются «полосами движения с пунктом ручной оплаты». Понятно, что полосы движения, которые снабжены пунктом автоматической оплаты, но которые вышли из строя и на которых поэтому человеку необходимо выполнять такие действия, как получение платы или сборов, рассматриваются как полосы движения с пунктом ручной оплаты. Понятно также, что полосы движения, на которых вместо пункта автоматической оплаты предусмотрены пункты оплаты с человеком-оператором, считаются полосами движения с пунктом ручной оплаты. В случае полосы движения с пунктом ручной оплаты транспортное средство должно остановиться у пункта взимания платы, чтобы человек мог передать или получить плату и билет.
[0016] Информация о полосе движения с пунктом ручной оплаты включает в себя положение такой полосы движения с пунктом ручной оплаты, положение въезда и выезда с полосы движения с пунктом ручной оплаты для транспортных средств, ширину полосы движения и длину полосы движения с пунктом ручной оплаты. Здесь и далее въезд и выезд с полосы движения с пунктом ручной оплаты для транспортных средств просто называются въездом и выездом с полосы движения с пунктом ручной оплаты.
[0017] Навигационная система 6 направляет рассматриваемое транспортное средство к месту назначения, установленному находящимся в транспортном средстве лицом, таким как водитель рассматриваемого транспортного средства. Навигационная система 6, исходя из каждого элемента информации, выводимого блоком 2 внешних датчиков, блоком 3 внутренних датчиков и блоком 4 приема радиосигналов GPS, рассчитывает планируемые дороги движения к месту назначения и направляет рассматриваемое транспортное средство к месту назначения. Находящееся в транспортном средстве лицо устанавливает, следует ли проходить через пункты ручной оплаты или пункты автоматической оплаты, и на основе этой настроечной информации устанавливается то, какие пункты оплаты следует проходить на планируемых дорогах движения. Следует отметить, что пункты оплаты могут быть автоматически определены в соответствии с состоянием бортового устройства (например, вставлена ли карта для оплаты проезда через пункты автоматической оплаты).
[0018] Блок 7 привода включает в себя исполнительный механизм для изменения величины срабатывания педали 8 акселератора, исполнительный механизм для изменения величины срабатывания педали 9 тормоза и исполнительный механизм для изменения угла поворота рулевого колеса 10. Другими словами, блок 7 привода способен управлять приводным усилием, тормозным усилием и углом поворота рулевого колеса рассматриваемого транспортного средства.
[0019] ЭБУ 1 включает в себя блок 11 определения полосы движения, блок 12 обнаружения запланированной позиции остановки, блок 13 обнаружения действий водителя и блок 14 управления движением в качестве функциональных составляющих, реализуемых посредством исполнения компьютерной программы.
[0020] Блок 11 определения полосы движения определяет, планирует ли рассматриваемое транспортное средство въехать на полосу движения с пунктом ручной оплаты, на основе местоположения рассматриваемого транспортного средства и информации о полосах движения с пунктом ручной оплаты. Блок 12 обнаружения запланированной позиции остановки обнаруживает те положения, в которых рассматриваемое транспортное средство планирует остановиться, на основании информации, выводимой блоком 2 внешних датчиков, и информации о полосах движения с пунктом ручной оплаты. В частности, блок 12 обнаружения запланированной позиции остановки обнаруживает запланированную позицию остановки, которая находится перед, в направлении движения транспортного средства, устройством сбора платежей, предусмотренным на полосе движения с пунктом ручной оплаты, в который могут быть внесены платежи, или кабиной, в которой размещается лицо, ответственное за сбор платежей. Здесь и далее устройства сбора платежей, кабины и тому подобные, у которых останавливаются транспортные средства, как описано выше, все вместе называются «пунктами взимания платы».
[0021] Когда блок 14 управления движением не управляет блоком 7 привода, блок 13 обнаружения действий водителя определяет, управляет ли водитель рассматриваемым транспортным средством (ведет ли он его). Блок 14 управления движением управляет блоком 7 привода, чтобы выполнять управление движением рассматриваемого транспортного средства. Состояние, в котором блок 14 управления движением выполняет управление движением транспортного средства для автоматического вождения рассматриваемого транспортного средства, называется «режимом автоматизированного вождения», а состояние, в котором блок 14 управления движением не выполняет управление движением транспортного средства, называется «режимом ручного вождения». В режиме ручного вождения водитель должен сам управлять рулением, ускорением и замедлением рассматриваемого транспортного средства.
[0022] Далее со ссылкой на фиг. 2 будет описан способ управления движением транспортного средства, выполняемый ЭБУ 1. Здесь предполагается, что блок 14 управления движением выполняет управление движением транспортного средства на рассматриваемом транспортном средстве в соответствии с указаниями навигационной системы 6 на основании информации о планируемых дорогах движения. Другими словами, предполагается, что рассматриваемое транспортное средство находится в режиме автоматизированного вождения. ЭБУ 1 последовательно выполняет управление движением транспортного средства, показанное на блок–схеме последовательности операций по фиг. 2.
[0023] Как проиллюстрировано на фиг. 2, сначала блок 11 определения полосы движения определяет, планирует ли рассматриваемое транспортное средство въехать на полосу движения с пунктом ручной оплаты (рассматриваемое транспортное средство въедет на полосу движения с пунктом ручной оплаты) (этап S1). Блок 11 определения полосы движения выполняет такое определение, определяя диапазон полосы движения с пунктом ручной оплаты на основе положения полосы движения с пунктом ручной оплаты, ширины полосы движения и длины полосы движения с пунктом ручной оплаты и сравнивая положение рассматриваемого транспортного средства и диапазон полосы движения с пунктом ручной оплаты (этап S1). В случае, когда рассматриваемое транспортное средство не планирует въехать на полосу движения с пунктом ручной оплаты (НЕТ на этапе S1), процесс заканчивается. Следует отметить, что блок 11 определения полосы движения может получать рассчитанную навигационной системой 6 информацию о запланированных дорогах движения и определять, находятся ли установленные пункты взимания платы, через которые рассматриваемое транспортное средство планирует проехать по запланированным дорогам движения, в пределах указанного диапазона от рассматриваемого транспортного средства, или достигнет ли рассматриваемое транспортное средство установленных пунктов взимания платы в течение указанного времени (этап S1).
[0024] В случае, когда рассматриваемое транспортное средство планирует въехать на полосу движения с пунктом ручной оплаты (ДА на этапе S1), блок 14 управления движением отключает режим автоматизированного вождения и переключается в ручной режим вождения, прекращая управление блоком 7 привода (этап S3).
[0025] В режиме ручного вождения водитель должен управлять рассматриваемым транспортным средством, чтобы оно двигалось, другими словами, водитель должен вести рассматриваемое транспортное средство. Соответственно, ЭБУ 1 предлагает водителю рассматриваемого транспортного средства выполнять ручное вождение, например, выводя из навигационной системы 6 голосовое сообщение, такое как «Автоматизированное вождение будет отключено. Управляйте транспортным средством.» (этап S5). Следует отметить, что навигационная система 6 может отображать текст или тому подобное на экране, предлагая вождение (этап S5).
[0026] Далее блок 13 обнаружения действий водителя определяет, ведет ли водитель рассматриваемое транспортное средство, на основе степени вдавливания педали акселератора, величины управления педалью тормоза или угла поворота рулевого колеса (этап S7). Например, в случае, когда изменение степени вдавливания педали акселератора, величины управления педалью тормоза или угла поворота рулевого колеса продолжается в течение определенного времени, блок 13 обнаружения действий водителя определяет, что водитель ведет рассматриваемое транспортное средство (ДА на этапе S7), и процесс заканчивается. Водитель продолжает вести рассматриваемое транспортное средство. Например, водитель осуществляет платеж (уплачивает сбор за проезд), и рассматриваемое транспортное средство выезжает из полосы движения с пунктом ручной оплаты.
[0027] В случае, когда, например, изменение степени вдавливания педали акселератора, величины управления педалью тормоза или угла поворота рулевого колеса не продолжается в течение определенного времени, блок 13 обнаружения действий водителя определяет, что водитель не ведет рассматриваемое транспортное средство (НЕТ на этапе S7). В этом случае блок 12 обнаружения запланированной позиции остановки пытается обнаружить запланированную позицию остановки перед «пунктом взимания платы» в направлении движения транспортного средства на основании информации, выводимой блоком 2 внешних датчиков, и информации о полосе движения с пунктом ручной оплаты (этап S9).
[0028] Например, имеет место случай, когда рассматриваемое транспортное средство не может быть остановлено, потому что есть другое транспортное средство перед рассматриваемым транспортным средством и до «пункта взимания платы» в направлении движения транспортного средства (НЕТ на этапе S9). В этом случае ЭБУ 1 выдает голосовое предупреждение, такое как «Транспортное средство выполнит аварийную остановку.», от навигационной системы 6, блок 14 управления движением управляет блоком 7 привода, чтобы немедленно остановить движение рассматриваемого транспортного средства (этап S11), и затем процесс заканчивается.
[0029] С другой стороны, в случае, когда, например, нет другого транспортного средства до «пункта взимания платы» в направлении движения транспортного средства, запланированная позиция остановки может быть обнаружена, и рассматриваемое транспортное средство может быть остановлено на этой запланированной позиции остановки (ДА на этапе S9), процесс переходит к этапу S13.
[0030] На этапе S13 ЭБУ 1 выводит голосовое сообщение, такое как «Транспортное средство будет двигаться и остановится автоматически.», от навигационной системы 6, блок 14 управления движением управляет блоком 7 привода, чтобы остановить рассматриваемое транспортное средство на запланированной позиции остановки (этап S13), и затем процесс заканчивается. Следует отметить, что навигационная система 6 может отображать текст или тому подобное на экране, например, «Транспортное средство будет двигаться и остановится автоматически» (этап S13).
[0031] Далее будет проиллюстрирована конструкция полосы движения с пунктом ручной оплаты и будет более конкретно описан способ управления движением транспортного средства в этом варианте осуществления.
[0032] Как показано на фиг. 3A, 3B и 3C, имеется устройство 101 сбора платежей, иными словами, пункт взимания платы, в котором находящиеся в транспортных средствах лица выполняют действия, такие как оплата сборов, на полосе 100 движения с пунктом ручной оплаты. В данном случае пункт взимания платы означает устройство или кабину, в некотором положении рядом с которым(ой) (сбоку от пункта взимания платы) предполагается временная остановка транспортных средств. Это определение не зависит от того, есть ли там персонал или нет, и обрабатывается ли оплата деньгами. Пункты взимания платы в этом определении не ограничены платными дорогами, но включают в себя устройства или кабины для управления въездом и выездом транспортных средств на парковки и с парковок или тому подобное. Пункты взимания платы в этом определении также включают в себя устройства, которые автоматически выдают билеты на въезд, и устройства, включающие в себя прибор считывания карт (картосчитыватель) для аутентификации карточек водителей на въезд и выезд. Следует отметить, что в тех странах или регионах, где транспортные средства движутся по левой стороне дороги, устройство 101 сбора платежей расположено с правой стороны от полосы 100 движения с пунктом ручной оплаты, если смотреть в направлении 1003 движения транспортных средств. На фиг. 3А, 3В и 3С направления наблюдения обозначены X, Y и Z.
[0033] Через полосу 100 движения с пунктом ручной оплаты от устройства 101 сбора платежей расположено устройство 102 сбора платежей, которое предназначено для следующей полосы движения с пунктом ручной оплаты. Устройства 101 и 102 сбора платежей находятся на островках 103, которые на одну ступеньку выше полос движения с пунктом ручной оплаты.
[0034] Устройства 101 и 102 сбора платежей являются примерами «пункта взимания платы, предусмотренного на полосе движения», а под «пунктом взимания платы, предусмотренным на полосе движения» подразумевается пункт взимания платы, обращенный «лицом» к полосе движения с тем, чтобы движущиеся по этой полосе движения транспортные средства могли выполнять действия в пункте взимания платы. Транспортные средства, движущиеся по полосе 100 движения с пунктом ручной оплаты, могут выполнять действия на устройстве 101 сбора платежей. Другими словами, устройство 101 сбора платежей является примером пункта взимания платы, обращенного «лицом» к полосе 100 движения с пунктом ручной оплаты, и является пунктом взимания платы, предусмотренным на полосе 100 движения с пунктом ручной оплаты. Транспортные средства, движущиеся по полосе 100 движения с пунктом ручной оплаты, не могут выполнять действия на устройстве 102 сбора платежей. Другими словами, поскольку устройство 102 сбора платежей не обращено «лицом» к полосе 100 движения с пунктом ручной оплаты, устройство 102 сбора платежей не является пунктом взимания платы, предусмотренным на полосе 100 движения с пунктом ручной оплаты.
[0035] Устройства 101 и 102 сбора платежей имеют общую крышу 104 над ними. К концевым частям крыши 104 с ближней стороны в направлении движения транспортного средства прикреплены вывеска 105 и светофор 106 так, чтобы их можно было увидеть с ближней стороны в направлении движения транспортного средства. Вывеска 105 и светофор 106 расположены, например, на концевых участках крыши 104 на ближней стороне в направлении движения транспортного средства.
[0036] Рядом с выездом 1002 из полосы 100 движения с пунктом ручной оплаты расположен шлагбаум 107. Как показано на фиг. 3А, 3В и 3С, когда шлагбаум 107 блокирует верхнюю часть полосы 100 движения с пунктом ручной оплаты, транспортные средства не могут выехать с полосы 100 движения с пунктом ручной оплаты. Когда шлагбаум 107 не блокирует полосу, транспортные средства могут выезжать с полосы 100 движения с пунктом ручной оплаты.
[0037] Как проиллюстрировано на фиг. 3А, запланированная позиция 120 остановки устанавливается находящейся перед устройством 101 сбора платежей в направлении движения транспортного средства. Конец запланированной позиции 120 остановки со стороны выезда 1002 называется целевым положением 121. Задний конец запланированной позиции 120 остановки с ближней стороны в направлении движения транспортного средства называется целевым положением 122. Другими словами, запланированная позиция 120 остановки является зоной между целевым положением 121 и целевым положением 122 на полосе 100 движения с пунктом ручной оплаты. Целевые положения 121 и 122 получаются путем обработки результатов обнаружения блока 2 внешних датчиков.
[0038] Например, поскольку вывеска 105 и светофор 106 расположены перед устройством 101 сбора платежей в направлении движения транспортного средства, целевое положение 121 может быть установлено в положение под вывеской 105 и светофором 106. В качестве альтернативы, поскольку конец крыши 104 с ближней стороны в направлении движения транспортного средства расположен перед устройством 101 сбора платежей в направлении движения транспортного средства, целевое положение 121 может быть установлено в положение под концом крыши 104 с ближней стороны в направлении движения транспортного средства.
[0039] В этом случае, например, блок 12 обнаружения запланированной позиции остановки обнаруживает зону вывески 105 или тому подобного по изображению впереди рассматриваемого транспортного средства, снятому камерой блока 2 внешних датчиков, и измеряет расстояние между рассматриваемым транспортным средством и вывеской 105 или тому подобным на основании изменения во времени размера обнаруженной зоны. Блок 12 обнаружения запланированной позиции остановки устанавливает целевое положение 121 на основании этого расстояния и положения рассматриваемого транспортного средства.
[0040] Следует отметить, что высота вывески 105 или тому подобного может быть предварительно сохранена, и горизонтальное расстояние между рассматриваемым транспортным средством и вывеской 105 или тому подобным может быть определено на основании определенного по изображению расстояния и этой высоты.
[0041] В качестве альтернативы, поскольку конец островка 103 с ближней стороны в направлении движения транспортного средства расположен перед вывеской 105 и светофором 106 в направлении движения транспортного средства, целевое положение 122 может быть установлено на участок сбоку от конца островка 103 с ближней стороны в направлении движения транспортного средства.
[0042] В этом случае, так же, как и для целевого положения 121, блок 12 обнаружения запланированной позиции остановки, например, измеряет расстояние между рассматриваемым транспортным средством и концом островка 103 с ближней стороны в направлении движения транспортного средства по изображению впереди рассматриваемого транспортного средства, снятому камерой блока 2 внешних датчиков. Блок 12 обнаружения запланированной позиции остановки устанавливает целевое положение 122 на основании этого расстояния и положения рассматриваемого транспортного средства.
[0043] Следует отметить, что может быть заранее сохранена высокоточная карта, на которой хранятся контуры таких конструкций, как вывеска 105 и островок 103. Когда целевые положения 121 и 122 обнаружены, сигналы или изображение, полученные от радиолокационного устройства или камеры блока 2 внешних датчиков, сравниваются с высокоточной картой, и расстояние до конструкций может быть измерено с использованием результатов такого сравнения.
[0044] Кроме того, в качестве целевых положений 121 и 122 могут использоваться положения, полученные путем соответствующего смещения положений, полученных при обнаружении, вместо того, чтобы использовать их как есть.
[0045] Рассматриваемое транспортное средство 200, показанное на фиг. 4А, вошло в полосу 100 движения с пунктом ручной оплаты, а значит, режим автоматизированного вождения был отключен, и рассматриваемое транспортное средство 200 находится в режиме ручного вождения (этап S3 на фиг.2). В случае, когда вождение рассматриваемого транспортного средства 200 не осуществляется водителем (НЕТ на этапе S7 по фиг.2), блок 14 управления движением управляет блоком 7 привода, чтобы остановить рассматриваемое транспортное средство 200 на запланированной позиции 120 остановки, в частности, между целевым положением 121 и целевым положением 122 (этап S13 на фиг. 2).
[0046] Предпочтительно, чтобы (условие 1) передний конец 201 рассматриваемого транспортного средства 200 был расположен перед целевым положением 121 в направлении движения транспортного средства, и чтобы (условие 2) задний конец 202 рассматриваемого транспортного средства 200 был ближе к выезду 1002 полосы 100 движения с пунктом ручной оплаты, чем целевое положение 122, как показано на фиг. 4B.
[0047] Тем не менее, условие 1 может иметь приоритет над условием 2. Как показано на фиг. 4C, если передний конец 201 рассматриваемого транспортного средства 200 находится перед целевым положением 121 в направлении движения транспортного средства, другими словами, если условие 1 удовлетворяется, задний конец 202 не должен быть ближе к выезду1002, чем целевое положение 122. В частности, условие 2 не должно удовлетворяться.
[0048] Как описано выше, блок 14 управления движением автоматически останавливает рассматриваемое транспортное средство 200 на запланированной позиции 120 остановки, которая находится перед устройством 101 сбора платежей в направлении движения транспортного средства.
[0049] Водитель рассматриваемого транспортного средства 200 понимает, что ему/ей необходимо вести рассматриваемое транспортное средство 200, потому что оно прекратило движение, и затем водитель ведет рассматриваемое транспортное средство 200 и останавливает рассматриваемое транспортное средство 200, например, перед устройством 101 сбора платежей.
[0050] Затем, если имеет место тот случай, когда рассматриваемое транспортное средство 200 выезжает на платную дорогу, водитель получает билет, выданный из устройства 101 сбора платежей. Если имеет место тот случай, когда рассматриваемое транспортное средство 200 съезжает с платной дороги, водитель помещает билет и плату в устройство 101 сбора платежей для осуществления оплаты. Поскольку устройство 101 сбора платежей выдает билеты, как описано выше, устройство 101 сбора платежей также называется машиной выдачи билетов.
[0051] Когда вышеуказанное действие выполнено на устройстве 101 сбора платежей, шлагбаум 107, блокировавший полосу 100 движения с пунктом ручной оплаты, поднимается. Водитель запускает рассматриваемое транспортное средство 200, проезжает мимо шлагбаума 107 и выезжает из полосы 100 движения с пунктом ручной оплаты.
[0052] Если водитель не ведет рассматриваемое транспортное средство 200, остающееся в режиме ручного вождения, рассматриваемое транспортное средство 200 продолжило бы движение по своей инерции. Если водитель не получает билет или если водитель не вносит плату, шлагбаум 107 продолжает блокировать полосу 100 движения с пунктом ручной оплаты. В этом случае рассматриваемое транспортное средство 200 может врезаться в шлагбаум 107. Чтобы предотвратить эту ситуацию, в настоящем варианте осуществления движение рассматриваемого транспортного средства 200 останавливается автоматически, тем самым предотвращая врезание рассматриваемого транспортного средства 200 в шлагбаум 107.
[0053] Даже если такое управление движением транспортного средства не выполняется, если рассматриваемое транспортное средство 200 способно обнаруживать препятствие впереди и автоматически останавливаться, рассматриваемое транспортное средство 200 обнаружило бы шлагбаум 107 и остановилось автоматически.
[0054] Однако в этом случае рассматриваемое транспортное средство 200 проехало бы мимо устройства 101 сбора платежей и не смогло бы выполнять такие действия, как уплата сбора, другими словами, рассматриваемое транспортное средство 200 остановилось бы в неподходящем положении. Следовательно, в настоящем варианте осуществления рассматриваемое транспортное средство 200 автоматически останавливается в положении перед пунктом взимания платы, таким как устройство 101 сбора платежей, в направлении движения транспортного средства. Таким образом, настоящий вариант осуществления предотвращает проезд транспортного средства 200 мимо устройства 101 сбора платежей и остановку в неподходящем положении.
[0055] Между тем, есть случаи, когда пункт взимания платы на полосе движения с пунктом ручной оплаты является не устройством сбора платежей, а кабиной, в которой находится лицо, ответственное за сбор платежей. Кроме того, существуют различные виды размеров и форм устройств или кабин для сбора платежей, и число их видов велико. По этой причине требуется сложное управление, чтобы установить запланированную позицию остановки в положение не до пункта взимания платы в направлении движения транспортного средства, а также в соответствии с типом пункта взимания платы.
[0056] Следовательно, в настоящем варианте осуществления обнаруживают запланированную позицию остановки перед пунктом взимания платы в направлении движения транспортного средства для остановки рассматриваемого транспортного средства 200. В случае, когда запланированная позиция остановки установлена перед пунктом взимания платы, запланированная позиция остановки может быть легко обнаружена по изменению во времени на изображении, как описано выше, что устраняет сложное управление, основанное на типе пункта взимания платы.
[0057] Как было описано выше, настоящий вариант осуществления препятствует проезду рассматриваемого транспортного средства мимо пункта взимания платы в случае, когда предполагается останавливание рассматриваемого транспортного средства у пункта взимания платы (устройства сбора платежей, ответственного лица или и т. д.), предусмотренного на полосе движения, для того, чтобы находящееся в транспортном средстве лицо выполнило действия (такие как оплата дорожного сбора, получение билета, внесение билета или получение квитанции). Другими словами, настоящий вариант осуществления позволяет выполнять действия в пункте взимания платы без сбоев.
[0058] Кроме того, поскольку в настоящем варианте осуществления транспортное средство останавливается в положении перед пунктом взимания платы в направлении движения транспортного средства, можно обойтись без сложного управления, основанного на типе пункта взимания платы. Кроме того, проезд после этого до места пункта взимания платы может быть оставлен водителю или тому подобному.
[0059] Кроме того, настоящий вариант осуществления включает в себя режим автоматизированного вождения для автоматической эксплуатации рассматриваемого транспортного средства. В случае, когда проезд через пункт взимания платы планируется в режиме автоматизированного вождения (ДА на этапе S1 по фиг. 2), другими словами, после того, как определено, что рассматриваемое транспортное средство войдет в полосу движения (ДА на этапе S1 по фиг. 2), водителю рассматриваемого транспортного средства предлагается выполнять ручное вождение (этап S5). Затем, после приглашения водителю на вождение, определяют, ведет ли водитель рассматриваемое транспортное средство (этап S7). Если водитель не ведет (НЕТ на этапе S7), выполняют управление движением транспортного средства на этапе S13. Если водитель ведет рассматриваемое транспортное средство (ДА на этапе S7), автоматическую остановку рассматриваемого транспортного средства не выполняют.
[0060] Таким образом, в случае, когда водитель ведет (ДА на этапе S7), управление движением транспортного средства на этапе S13 не является необходимым. Другими словами, в случае, когда водитель начинает вождение транспортного средства заранее, управление движением транспортного средства для автоматической остановки в положении перед пунктом взимания платы в направлении движения транспортного средства не является необходимым.
[0061] Следует отметить, что в настоящем варианте осуществления этапы S3, S5 и S7 на фиг.2 не являются существенными. Следовательно, в случае, когда рассматриваемое транспортное средство планирует въехать на полосу движения с пунктом ручной оплаты (ДА на этапе S1), процесс может перейти непосредственно к этапу S9. Кроме того, в случае, когда практически нет вероятности того, что запланированная позиция остановки не может быть обнаружена, процесс может непосредственно перейти к этапу S13 без выполнения этапа S9.
[0062] Хотя в настоящем варианте осуществления устройство управления движением транспортного средства смонтировано на целевом транспортном средстве, на котором выполняется управление движением транспортного средства, настоящее изобретение не ограничено этим примером. Устройство управления движением транспортного средства может быть смонтировано на серверном устройстве, сообщающемся с целевым транспортным средством, или на другом транспортном средстве, которое не является целевым транспортным средством. Обмен необходимыми сведениями и инструкциями может осуществляться посредством связи между серверным устройством или другим транспортным средством и целевым транспортным средством для удаленного выполнения того же или аналогичного способа управления движением транспортного средства. Связь между серверным устройством и целевым транспортным средством может быть выполнена посредством беспроводной связи или связи между транспортным средством и дорогой. Связь между другим транспортным средством и целевым транспортным средством может быть выполнена посредством так называемой связи между транспортными средствами.
[0063] Хотя выше был описан вариант осуществления настоящего изобретения, не следует понимать, что описания и чертежи, составляющие часть этого раскрытия, ограничивают изобретение. Из этого раскрытия специалистам в данной области техники станут очевидны различные альтернативные варианты осуществления, примеры и методы работы.
СПИСОК УСЛОВНЫХ ОБОЗНАЧЕНИЙ
[0064] 1 – ЭБУ
2 – блок внешних датчиков
3 – блок внутренних датчиков
4 – блок приема радиосигналов GPS
5 – база данных карт
6 – навигационная система
7 – блок привода
8 – педаль акселератора
9 – педаль тормоза
10 – рулевое колесо
11 – блок определения полосы движения
12 – блок обнаружения запланированной позиции остановки
13 – блок обнаружения действий водителя
14 – блок управления движением
100 – полоса движения с пунктом ручной оплаты
101, 102 – устройство сбора платежей
103 – островок
104 – крыша
105 – вывеска
106 – светофор
107 – шлагбаум
120 – запланированная позиция остановки
121, 122 – целевое положение
200 – рассматриваемое транспортное средство
201 – передний конец рассматриваемого транспортного средства
202 – задний конец рассматриваемого транспортного средства
1001 – въезд на полосу движения с пунктом ручной оплаты
1002 – выезд с полосы движения с пунктом ручной оплаты
1003 – направление движения.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Способ управления движением и устройство управления движением
Способ и устройство управления отображением

