Результат интеллектуальной деятельности: Комплексная система управления маневровыми локомотивами
Вид РИД
Изобретение
Изобретение относится к железнодорожному транспорту и может быть использовано для организации и автоматического контроля маневровых передвижений рельсовых транспортных средств.
Известна система для управления маневровым локомотивом, которые содержат светофоры и рельсовые цепи, соединенные с блоком кодирования, вход которого подключен к выходу блока электрической централизации и установленные на локомотиве, блок автоматической локомотивной сигнализации, вход которого соединен с приемными катушками, а выход - подключен к первым входам блока индикации и блока вычисления программной скорости, датчик пути и скорости, соединенный через скоростемер со вторым входом блока индикации, с входом блока измерения ускорения и с первым входом блока сравнения, второй вход которого соединен с выходом блока вычисления программной скорости и с третьим входом блока индикации, выход блока сравнения подключен к блоку управления тормозами и тягой, контроллер управления тяговыми двигателями, соединенный первым выходом с блоком спутниковой навигационной системы и электронной карты, выход которого подключен ко второму входу блока вычисления программной скорости, второй выход контроллера управления тяговыми двигателями соединен с первым входом блока определения положения вагонов, второй и третий входы, которого соединены, соответственно, с первым и вторым концевыми выключателями автосцепок локомотива, выход блока определения положения вагонов соединен с третьим входом блока вычисления программной скорости, четвертый вход которого соединен с выходом блока памяти, первый вход которого соединен с выходом блока измерения ускорения, а второй вход соединен с выходом блока определения остановки, вход которого подключен к выходу датчика пути и скорости, блок автоматической локомотивной сигнализации, блок электрической централизации и переносное устройство составителя поезда снабжены приемо-передающими устройствами, связанными между собой цифровым радиоканалом связи, блок электрической централизации соединен с ЭВМ автоматизированного рабочего места маневрового диспетчера, в блоке памяти которой записаны данные об отцепленных вагонах, находящихся в пределах станции (RU 92642, B61L3/20, 27.03.10).
Недостатком известной системы для управления маневровым локомотивом является отсутствие связи с дежурным по станции, что не позволяет оперативно управлять маневровой работой при возникновении нестандартных ситуаций.
В качестве прототипа принята комплексная система управления маневровыми локомотивами, содержащая установленные на станции управляющий вычислительный комплекс маневровой автоматической локомотивной сигнализации и станционный приемник навигационных сигналов, вход/выход которого соединен с выходом/входом управляющего вычислительного комплекса маневровой автоматической локомотивной сигнализации, другие входы/выходы которого соединены с выходами/входами, по крайней мере, одного автоматизированного рабочего места дежурного по станции, установленное на каждом маневровом локомотиве бортовое устройство управления, включающее контроллер связи, бортовой приемник навигационных сигналов, приемо-передающее устройство, блок управления, первый выход которого подключен к входу средства управления тягой, второй выход - к входу средства управления торможением, блок контроля и обработки информации, первые входы/выходы которого соединены с выходами/входами контроллера связи, первым входом/выходом соединенного с выходом/входом приемника навигационных сигналов, а другим входом/выходом - с выходом/входом приемо-передающего устройства, соединенного радиоканалами посредством станционной системы связи с управляющим вычислительным комплексом маневровой автоматической локомотивной сигнализации и пультом дистанционного управления маневровым локомотивом, блок разрешенных режимов, входы/выходы которого соединены с соответствующими выходами/входами блока управления, другими входами/выходами подключенного к соответствующим выходам/входам блока контроля и обработки информации, блок индикации и формирователь сигнала экстренной остановки локомотива, входы которых соединены с соответствующими выходами блока контроля и обработки информации, другими входами подключенного к выходам датчиков, при этом бортовой и станционный приемники навигационных сигналов посредством беспроводного канала радиосвязи соединены с космической радионавигационной системой (RU 102345, B61L3/00, 27.02.2011).
Известная система имеет недостаточный уровень полноты безопасности (SIL2) обусловленный тем, что бортовая аппаратура локомотивов маневровой автоматической локомотивной сигнализации осуществляет одноканальную обработку информации для управления маневровыми передвижениями. Введение для повышения полноты безопасности в бортовую аппаратуру двух канальной обработки информации для управления маневровыми передвижениями сопряжено со значительными экономическими затратами на усложнение этой аппаратуры и переоборудование имеющегося парка маневровых локомотивов.
Технический результат изобретения заключается в повышении уровня полноты безопасности системы, при минимизации затрат на переоборудование имеющегося парка маневровых локомотивов.
Технический результат достигается тем, что в комплексной системе управления маневровыми локомотивами, содержащей установленные на станции управляющий вычислительный комплекс маневровой автоматической локомотивной сигнализации и станционный приемник навигационных сигналов, выход которого соединен со входом управляющего вычислительного комплекса маневровой автоматической локомотивной сигнализации, другие входы/выходы которого соединены с выходами/входами компьютера автоматизированного рабочего места дежурного по станции, установленное на каждом маневровом локомотиве бортовое устройство управления, включающее контроллер связи, бортовой приемник навигационных сигналов, приемо-передающее устройство, блок управления, первый выход которого подключен к входу средства управления тягой, второй выход - к входу средства управления торможением, блок контроля и обработки информации, первые входы/выходы которого соединены с выходами/входами контроллера связи, первым входом/выходом соединенного с выходом/входом приемника навигационных сигналов, а другим входом/выходом - с выходом/входом приемо-передающего устройства, соединенного радиоканалами посредством станционной системы связи с управляющим вычислительным комплексом маневровой автоматической локомотивной сигнализации и пультом дистанционного управления маневровым локомотивом, блок разрешенных режимов, входы/выходы которого соединены с соответствующими выходами/входами блока управления, другими входами/выходами подключенного к соответствующим выходам/входам блока контроля и обработки информации, блок индикации и формирователь сигнала экстренной остановки локомотива, входы которых соединены с соответствующими выходами блока контроля и обработки информации, другими входами подключенного к выходам датчиков, при этом бортовой и станционный приемники навигационных сигналов посредством беспроводного канала радиосвязи соединены с космической радионавигационной системой, согласно изобретению управляющий вычислительный комплекс маневровой автоматической локомотивной сигнализации снабжен программно-аппаратными блоками симуляторов, попарно имитирующими работу блоков бортового устройства управления, функции которых связаны с обеспечением безопасности движения маневровых локомотивов, и блоками сравнения идентичности функционирования соответствующих пар программно-аппаратных блоков симуляторов, при этом выходы каждой пары программно-аппаратных блоков симуляторов соединены с соответствующими входами блока сравнения идентичности функционирования пар программно-аппаратных блоков симуляторов, выход которого соединен с входом приема сигналов защитного отключения вычислительного устройства управляющего вычислительного комплекса маневровой автоматической локомотивной сигнализации, а система снабжена дополнительными высокоскоростными широкополосными каналами радиосвязи.
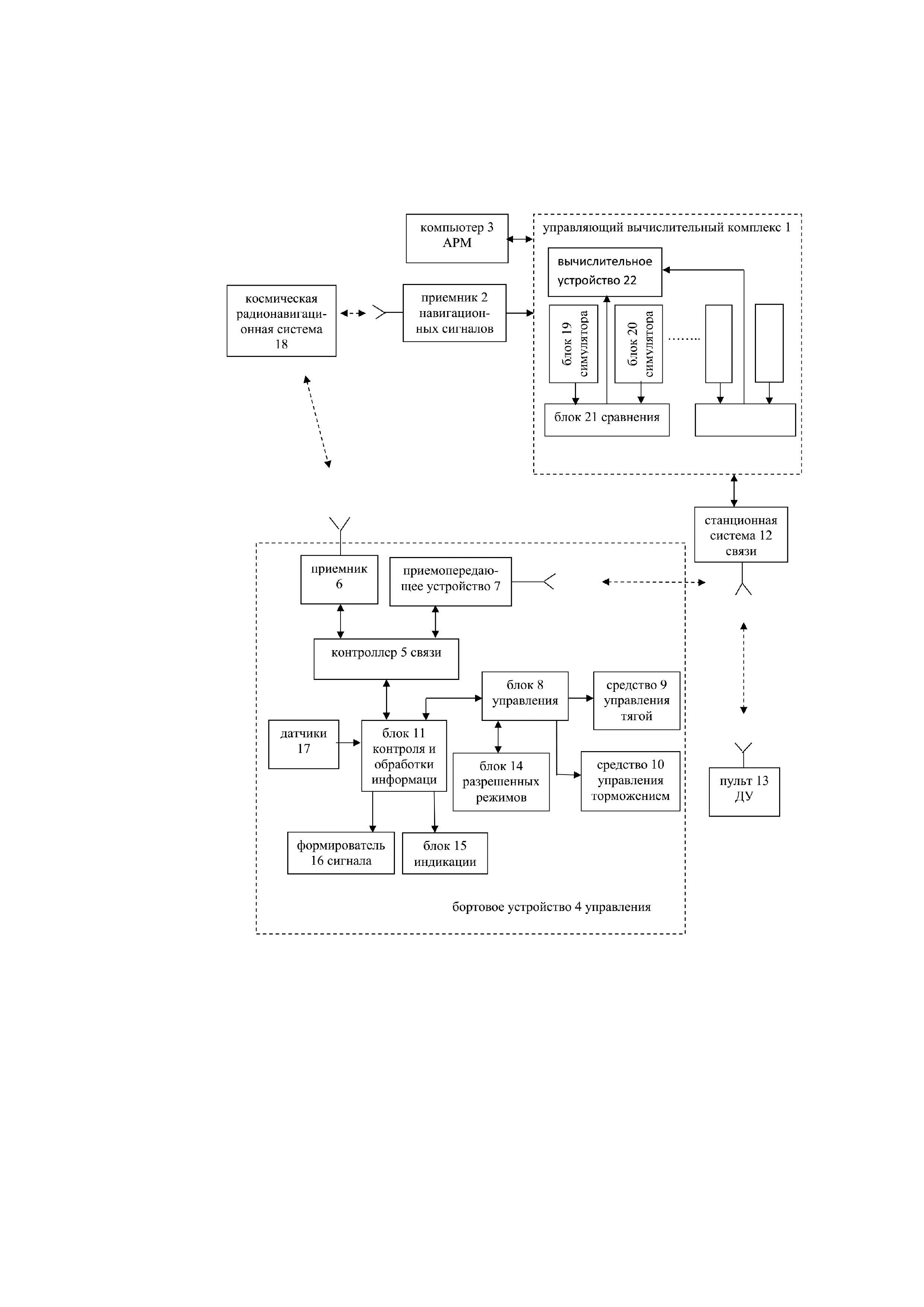
На чертеже приведена блок схема комплексной системы управления маневровыми локомотивами.
Комплексная система управления маневровыми локомотивами содержит установленные на станции управляющий вычислительный комплекс 1 маневровой автоматической локомотивной сигнализации и станционный приемник 2 навигационных сигналов, выход которого соединен со входом управляющего вычислительного комплекса 1 маневровой автоматической локомотивной сигнализации, другие входы/выходы которого соединены с выходами/входами компьютера 3 автоматизированного рабочего места (АРМ) дежурного по станции, установленное на каждом маневровом локомотиве бортовое устройство 4 управления, включающее контроллер 5 связи, бортовой приемник 6 навигационных сигналов, приемо-передающее устройство 7, блок 8 управления, первый выход которого подключен к входу средства 9 управления тягой, второй выход - к входу средства 10 управления торможением, блок 11 контроля и обработки информации, первые входы/выходы которого соединены с выходами/входами контроллера 5 связи, первым входом/выходом соединенного с выходом/входом приемника 6 навигационных сигналов, а другим входом/выходом - с выходом/входом приемо-передающего устройства 7, соединенного радиоканалами посредством станционной системы 12 связи с управляющим вычислительным комплексом 1 маневровой автоматической локомотивной сигнализации и пультом 13 дистанционного управления (ДУ) маневровым локомотивом, блок 14 разрешенных режимов, входы/выходы которого соединены с соответствующими выходами/входами блока 8 управления, другими входами/выходами подключенного к соответствующим выходам/входам блока 11 контроля и обработки информации, блок 15 индикации и формирователь 16 сигнала экстренной остановки локомотива, входы которых соединены с соответствующими выходами блока 11 контроля и обработки информации, другими входами подключенного к выходам датчиков 17, при этом бортовой 6 и станционный 2 приемники навигационных сигналов посредством беспроводного канала радиосвязи соединены с космической радионавигационной системой 18, управляющий вычислительный комплекс 1 маневровой автоматической локомотивной сигнализации снабжен программно-аппаратными блоками 19, 20 симуляторов, попарно имитирующими работу блоков бортового устройства 4 управления, функции которых связаны с обеспечением безопасности движения маневровых локомотивов, и блоками 21 сравнения идентичности функционирования соответствующих пар программно-аппаратных блоков 19, 20 симуляторов, при этом выходы каждой пары программно-аппаратных блоков симуляторов соединены с соответствующими входами блока 21 сравнения идентичности функционирования пар программно-аппаратных блоков симуляторов, выход которого соединен с входом приема сигналов защитного отключения вычислительного устройства 22 управляющего вычислительного комплекса 1 маневровой автоматической локомотивной сигнализации, а система снабжена дополнительными высокоскоростными широкополосными каналами радиосвязи (на чертеже не показано).
Комплексная система управления маневровыми локомотивами функционирует следующим образом:
Система управления маневровыми локомотивами построена как интегрированная система, функционирующая в режиме реального времени и обеспечивает:
1) контроль кратковременной потери связи и сохранение передаваемой информации;
2) смену режимов работы локомотива по приказу станционных устройств;
3) выполнение приказов дежурного по станции (ДСП), в том числе и на проезд запрещающего сигнала;
4) идентификация и определение соответствия маршрута и локомотива;
5) задание, продление, укорочение и отмена маршрутного задания;
6) контроль допустимой скорости движения при выполнении маршрутных заданий, в том числе на местах производства работ;
7) определение расстояния до мест производства работ;
8) контроль движения состава в пределах последней занятой секции маршрутного задания относительно его "головы" и "хвоста";
9) выполнение маршрутов за пределами станции с выводом локомотива из системы;
10) автоматическое включение системы принудительной остановки локомотива (автостоп) при неисправностях локомотивной аппаратуры или ее выключении; при несоблюдении допустимых скоростей движения кривой торможения; при превышении допустимой скорости движения; при подъезде к препятствию или месту работ, если от машиниста нет подтверждения о свободности пути; при попытке проезда запрещающего сигнала по приказу станционных устройств или ДСП.
Установленный на станции управляющий вычислительный комплекс 1 маневровой автоматической локомотивной сигнализации реализует функции и задачи комплексной системы, связанные с повышением безопасности движения при проведении маневровых работ на железнодорожных станциях, повышением безопасности при проведении работ на путях, а также с работой электрической централизации (ЭЦ), релейно-процессорной централизации (РПЦ), микропроцессорной централизации (МПЦ), диспетчерской централизации (ДЦ), действиями дежурных по станции, маневровых диспетчеров, электромехаников СЦБ и связи, персонала по техническому обслуживанию и ремонту.
Станционный управляющий вычислительный комплекс 1 маневровой автоматической локомотивной сигнализации рассчитан для работы в непрерывном круглосуточном режиме и обеспечивает прием от устройств электрической централизации (или от других систем) информации о состоянии рельсовых цепей, светофоров и положении стрелок, передачу информации о состоянии устройств ЭЦ, установку и снятие ограничений скорости движения в местах проведения работ на любом участке станции, формирование и передачу на бортовое устройство 4 управления маневрового локомотива задаваемого дежурным по станции маневрового маршрута. Кроме того, используя данные станционного приемника 2 навигационных сигналов и точные географические координаты станции, управляющий вычислительный комплекс 1 вычисляет величину дифференциальной поправки и передает ее значение на бортовое устройство 4 управления локомотивом.
Повышение безопасности движения обеспечивается за счет введения в управляющий вычислительный комплекс 1 программно-аппаратных блоков 19, 20 симуляторов, попарно имитирующими работу блоков бортового устройства управления, функции которых связаны с обеспечением безопасности движения маневровых локомотивов, и введения блоков 21 сравнения идентичности функционирования соответствующих пар программно-аппаратных блоков 19, 20 симуляторов, имеющих программную и аппаратную защиту от опасных отказов на уровне полноты безопасности SIL4, при этом совокупность введенных в управляющий вычислительный комплекс 1 технических средств совместно со станционной системой 12 связи обеспечивает требования системы управления маневровыми локомотивами по времени защитного отключения, при реализации в системе команд управления блокирующих опасные для движения маневровых локомотивов ситуации, для чего система снабжена дополнительными высокоскоростными широкополосными каналами радиосвязи, типа GSM, GPRS, Wi-Fi и.т.д.
Это создает возможности для повышения уровня полноты безопасности функционирования системы до требований стандартов SIL3, SIL4 в зависимости от информационной избыточности ответственной информации. Для этого с локомотивов, по дополнительным высокоскоростным широкополосным каналам радиосвязи (например, GSM, Wi-Fi и.т.д.), из бортового устройства 4 управления локомотивом в управляющий вычислительный комплекс 1 передается информация, необходимая для полной симуляции в управляющим вычислительным комплексе 1 работы блоков 11 контроля и обработки информации и частичной симуляции ряда остальных блоков. При этом в блоке 21 сравнения сравнения идентичности функционирования для каждого бортового устройства 4 управления локомотивом проверяется соответствие результатов работы как, например, соответствующего блока 11 контроля и обработки информации в реальном бортовом устройстве 4 управления i-го маневрового локомотива, так и соответствие результатов работы программно-аппаратных блоков 19, 20 симуляторов по имитации ими работы этого реального блока 11 контроля и обработки информации в реальном бортовом устройстве 4 управления i-го маневрового локомотива.
Примером ответственных команд управления являются, например, команды экстренного торможения локомотивов. Количество отдельных аппаратно программных блоков 19, 20 симулирующих в управляющим вычислительным комплексе 1 работу блоков 11 контроля и обработки информации бортового устройства 4 управления определяется производительностью вычислительного устройства 22, отдельных процессоров, используемых в управляющим вычислительным комплексе 1 и производительностью каналов передачи данных. Если производительности одной пары процессоров в программно аппаратных блоках 19, 20 симуляторов не хватает для симуляции работы имеющегося максимального числа в группе маневровых локомотивов, то в управляющим вычислительным комплексе 1 используется больше пар процессоров в программно аппаратных блоках 19, 20 симуляторов и блоков 21 сравнения. При этом также может потребоваться и большее количество отдельных радиоканалов связи между управляющим вычислительным комплексом 1 и группами маневровых локомотивов.
Станционная система 12 связи сравнивает информацию, поступившую от каждой пары не зависимых друг от друга процессоров из программно аппаратных блоков 19, 20 симуляторов и при совпадении этой информации передает соответствующие команды управления по радиоканалам на вход приемо-передающего устройства 7 соответствующего маневрового локомотива в предназначенных для этого временных слотах. В предназначенных для этого временных слотах это же устройство принимает данные о параметрах работы одноканальных бортовых устройств 4 соответствующих маневровых локомотивов, и если все функционирует правильно, передает на соответствующий маневровый локомотив сигнал разрешения работы его бортового устройства в интервале до следующего сеанса связи.
Информацию о маневровом маршруте, о величине дифференциальной поправки с помощью станционной системы 12 связи передают по каналу радиосвязи на вход приемо-передающего устройства 7, с выхода которого сигналы поступают на вход контроллера 5 связи. На другой вход контроллера 5 связи поступает информация с выхода приемника 6 навигационных сигналов, характеризующая географические координаты локомотива.
Контроллер 5 связи независимо от используемого стандарта связи осуществляет сопряжение информационных сигналов с блоком 11 контроля и обработки информации.
В блоке 11 сигналы, характеризующие местоположение локомотива, корректируются с учетом дифференциальной поправки и определяется точное положение локомотива.
Кроме того, в блок 11 контроля и обработки информации поступает информация с выходов датчиков 17 технических и динамических характеристик работы силовых устройств и передвижения локомотива.
Данные, полученные блоком 11 контроля и обработки информации, преобразуются для обеспечения возможности отображения их на дисплее блока 15 индикации. Таким образом, на дисплее блока 15 индикации отображается получаемая от управляющего вычислительного комплекса 1, космической радионавигационной системы 2 и обработанная по данным датчиков 17 информация о маршрутном задании, координатах, скорости движения маневрового локомотива и текущей длине маршрута.
В случае неисправности локомотивной аппаратуры или ее выключении, при несоблюдении допустимых скоростей движения по условиям торможения, при превышении допустимой скорости движения, при подъезде к препятствию или месту работ, если от машиниста нет подтверждения о свободности пути, при попытке проезда запрещающего сигнала, а также при попытке проезда последнего стыка, сигнал с блока 11 контроля и управления поступает на формирователь 16, осуществляющий формирование сигнала экстренной остановки локомотива, поступающего на электропневматический клапан (ЭПК) тормозной системы локомотива.
Кроме того, блок 11 в результате обработки полученных данных формирует сигналы для управления движением локомотива. Сигналы для управления локомотивом поступают в блок 8 управления, который формирует управляющие воздействия для средств 9 и 10 соответственно управления тягой и управления торможением.
При этом с выхода блока 14 в блок 8 управления поступает информация о разрешенных режимах движения локомотива, которая может меняться в зависимости от характеристик пути, силового и управляющего оборудования, оперативных приказов об изменении маршрута, поступающих от дежурного по станции или диспетчерского аппарата станции.
Подсистема дистанционного управления локомотивом, включающая пульт 13 дистанционного управления позволяет управлять движением локомотива вне кабины машиниста. Станционная система 12 связи обеспечивает высокое качество непрерывной двусторонней связи всех абонентов маневровой работы путем выделения отдельных радиочастот для каждого маневрового района станции. Каналы радиосвязи станционной системы 12 связи и установленное на локомотиве приемо-передающее устройство 7 обеспечивают передачу командной информации с пульта 13 дистанционного управления на блок 11 контроля и обработки информации.
Управляющий вычислительный комплекс 1 в соответствии с заданным ДСП маршрутом движения маневрового локомотива, установленными на маршруте сигналами и стрелочными переводами, профилем и состоянием пути формирует алгоритм допустимой скорости его движения по каждому участку пути, который по каналам станционной системы 12 связи передается в бортовое устройство 4 управления локомотивом. Приемо-передающее устройство 7 принимает информацию и через контроллер 5 связи передает ее в блок 11 контроля и обработки информации, где осуществляется его привязка к координатам позиционирования локомотива, его скорости и ускорения движения, а также характеристиками работы силовых установок.
Составитель из блока 14 разрешенных режимов получает информацию о максимально возможных скоростях движения маневрового локомотива по заданному дежурным по станции через компьютер 3 АРМ ДСП маршруту. В зависимости от характеристик работы оборудования локомотива и внешних факторов допустимая скорость движения на маршруте может отличаться от заданной управляющим вычислительным комплексом 1. При попытке задания составителем с пульта 13 дистанционного управления скорости, превышающей в этот момент заданную блоком 14 величину, последняя будет блокирована до разрешенного этим блоком значения.
Таким образом, предлагаемое изобретение обеспечивает повышение уровня полноты безопасности, при минимизации затрат на переоборудование имеющегося парка маневровых локомотивов.
Комплексная система управления маневровыми локомотивами, содержащая установленные на станции управляющий вычислительный комплекс маневровой автоматической локомотивной сигнализации и станционный приемник навигационных сигналов, выход которого соединен со входом управляющего вычислительного комплекса маневровой автоматической локомотивной сигнализации, другие входы/выходы которого соединены с выходами/входами компьютера автоматизированного рабочего места дежурного по станции, установленное на каждом маневровом локомотиве бортовое устройство управления, включающее контроллер связи, бортовой приемник навигационных сигналов, приемо-передающее устройство, блок управления, первый выход которого подключен к входу средства управления тягой, второй выход - к входу средства управления торможением, блок контроля и обработки информации, первые входы/выходы которого соединены с выходами/входами контроллера связи, первым входом/выходом соединенного с выходом/входом приемника навигационных сигналов, а другим входом/выходом - с выходом/входом приемо-передающего устройства, соединенного радиоканалами посредством станционной системы связи с управляющим вычислительным комплексом маневровой автоматической локомотивной сигнализации и пультом дистанционного управления маневровым локомотивом, блок разрешенных режимов, входы/выходы которого соединены с соответствующими выходами/входами блока управления, другими входами/выходами подключенного к соответствующим выходам/входам блока контроля и обработки информации, блок индикации и формирователь сигнала экстренной остановки локомотива, входы которых соединены с соответствующими выходами блока контроля и обработки информации, другими входами подключенного к выходам датчиков, при этом бортовой и станционный приемники навигационных сигналов посредством беспроводного канала радиосвязи соединены с космической радионавигационной системой, отличающаяся тем, что управляющий вычислительный комплекс маневровой автоматической локомотивной сигнализации снабжен программно-аппаратными блоками симуляторов, попарно имитирующими работу блоков бортового устройства управления, функции которых связаны с обеспечением безопасности движения маневровых локомотивов, и блоками сравнения идентичности функционирования соответствующих пар программно-аппаратных блоков симуляторов, при этом выходы каждой пары программно-аппаратных блоков симуляторов соединены с соответствующими входами блока сравнения идентичности функционирования пар программно-аппаратных блоков симуляторов, выход которого соединен с входом приема сигналов защитного отключения вычислительного устройства управляющего вычислительного комплекса маневровой автоматической локомотивной сигнализации, а система снабжена дополнительными высокоскоростными широкополосными каналами радиосвязи.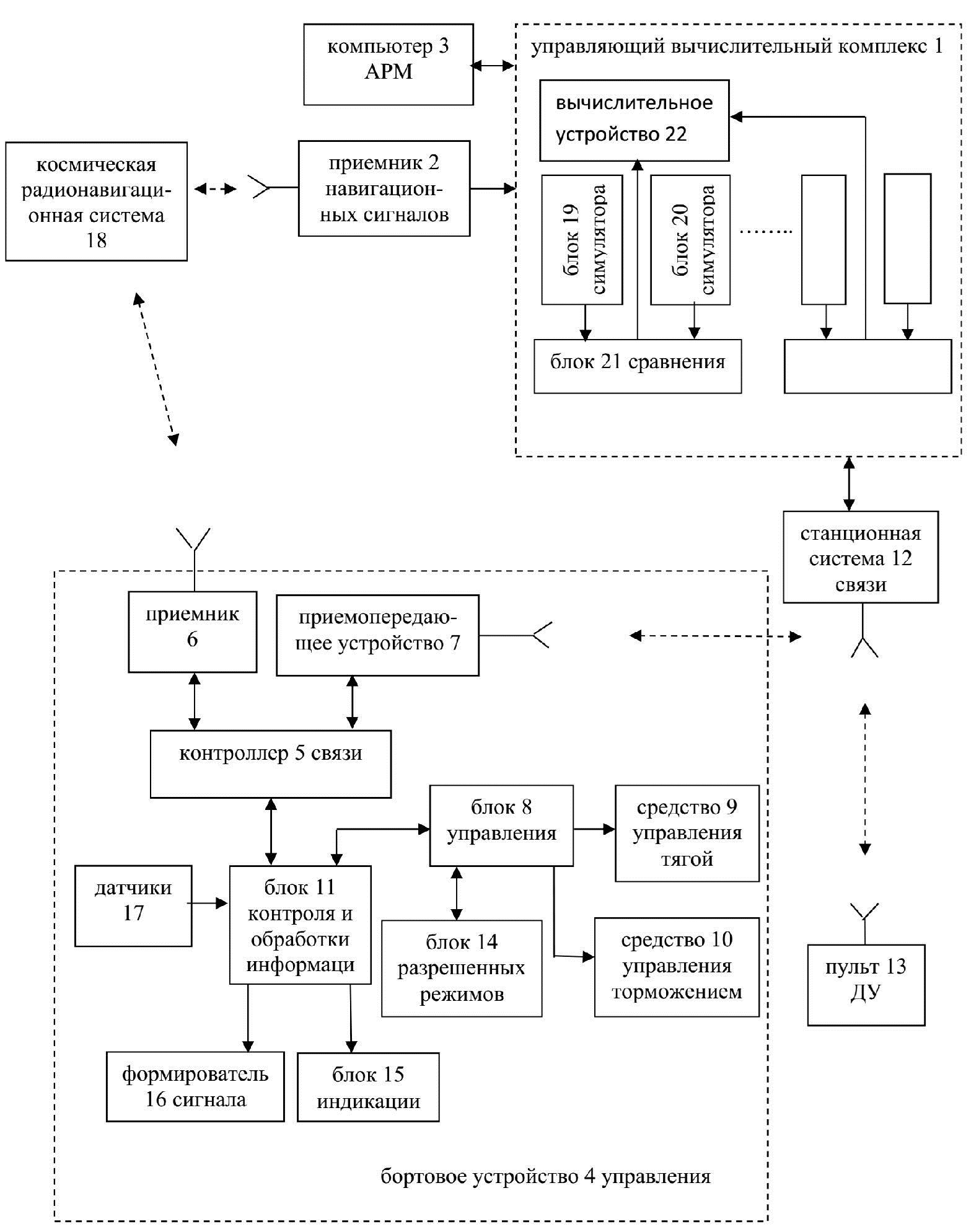
Устройство измерения линейной скорости транспортного средства
Адаптивный приемник сигналов автоматической локомотивной сигнализации
Система автоблокировки с тональными рельсовыми цепями
Способ мониторинга объектов инфраструктуры железнодорожной станции
Система ограждения места работ и оповещения работающих на железнодорожном пути о приближении подвижного состава
Система автоматизированного управления движением поездов
Устройство для обеспечения информационного обмена между автоматизированной системой управления движением и локомотивным устройством безопасности
Автоматическая система принудительной остановки поездов и маневровых составов у путевых упоров при движении на тупиковых путях станции
Система полуавтоматической блокировки
Система интервального регулирования движения поездов на перегоне
Двухканальная система для регулирования движения поездов
Способ определения свободности железнодорожного перегона от подвижного состава и система полуавтоматической блокировки железнодорожного перегона
Система для управления рельсовым транспортным средством и для определения его позиции на рельсовом пути
Система управления движением поездов при диспетчерской централизации
Устройство контроля соблюдения маршрута локомобилем

