Результат интеллектуальной деятельности: Магнитный подшипник
Вид РИД
Изобретение
Изобретение относится к магнитным подшипникам на постоянных магнитах, которые могут служить опорой для вращающихся валов машин и механизмов. В отличие от распространенных подшипников скольжения и качения соединение в заявленном магнитном подшипнике с валом механически бесконтактное, т.е. используется принцип магнитной левитации.
По способу создания магнитного поля в воздушном зазоре магнитные системы разделены на 4 группы: сверхпроводниковые магнитные подшипники (СМП), пассивные магнитные подшипники (ПМП), активные магнитные подшипники (АМП) и гибридные магнитные подшипники (ГМП).
Наибольшее распространение нашли две большие группы - активные и пассивные магнитные подшипники.
Работа активного магнитного подшипника базируется на принципе электромагнитной левитации. Основным недостатком является контроль положения вала ротора. Система датчиков непрерывно следит за положением вала и подает сигналы системе автоматического управления для точного позиционирования путем корректировки позиционирующего магнитного поля статора, сила притяжения с нужной стороны вала делается сильнее или слабее путем регулировки тока в статорных обмотках активных подшипников.
Активные магнитные подшипники имеют следующие существенные недостатки:
- сложность управления активными подвесами, для чего необходима сложная, дорогостоящая электронная система управления подвесом, использование которой может быть оправдано только в «дорогих» отраслях, например, космической и военной;
- необходимость использования страховочных подшипников, поскольку резкое отключение электричества или выход из строя магнитной катушки может привести к катастрофическим последствиям для всей механической системы, поэтому для страховки совместно с магнитными используют и механические подшипники, которые в случае отказа основных смогут взять на себя нагрузки и избежать серьезной поломки;
- нагрев обмотки катушек вследствие прохождения тока, создающего магнитное поле, обмотка катушек нагревается, что зачастую является неблагоприятным фактором и заставляет использовать специальные охлаждающие установки, что еще больше увеличивает стоимость использования подвеса;
- материалоемкость бесконтактного подшипника оказывается высокой, потому что площадь несущей поверхности для поддержания достаточной магнитной силы должна быть обширной и сердечник статора подшипника получается большим и тяжелым.
Активные магнитные подшипники требуют сложную и дорогостоящую аппаратуру управления, внешнего источника электроэнергии, что снижает эффективность и надежность всей системы. Поэтому идут активные работы по созданию пассивных магнитных подшипников, главным отличием которых является отсутствие активных элементов, то есть магнитное поле создается с помощью постоянных магнитов.
Постоянные магниты кольцом располагаются вокруг ротора и статора. Эффект левитации вала возникает вследствие того, что одноименные полюса магнита расположены в радиальном направлении. Магнитные системы на ПМП очень просты в создании, не требуют больших затрат, они также не требуют дополнительных источников энергии для поддержания вала в состоянии левитации.
Известен магнитный подшипник по патенту РФ №124339, содержащий установленную на валу втулку, два постоянных кольцевых магнита с конусными поверхностями, с одинаковым углом конусности - наружный и внутренний, расположенных коаксиально, одинаковыми полюсами друг к другу, отличающийся тем, что на одной стороне втулки выполнена опорная часть, а на другой - резьба, дополнительно устройство содержит удерживающий магнит, внешний корпус с полкой на внутренней поверхности, стопорное кольцо, прижимную гайку с резьбой и с нейлоновой вставкой, установленной в паз прижимной гайки, магнитонепроницаемые вставки, при этом наружный магнит установлен между полкой внешнего корпуса и стопорным кольцом, внутренний магнит установлен на опорную часть втулки, удерживающий магнит выполнен кольцевым и установлен на прижимной гайке с торца наружного магнита одинаковыми полюсами друг к другу, втулка посредством резьбы соединена с прижимной гайкой, одна из магнитонепроницаемых вставок установлена в прорези опорной части втулки и в прорези внешнего корпуса, а другая в прорези внешнего корпуса и в прорези прижимной гайки. Технический результат от использования полезной модели заключается в увеличении срока эксплуатации, повышении надежности, упрощении ремонта и замены, расширении возможностей применения.
Известен магнитный подшипник по патенту РФ №61483, содержащий корпус, вал, статор я ротор, расположенные с рабочим воздушным зазором друг относительно друга, отличающийся тем, что статор выполнен в виде постоянного магнита, по форме полого цилиндра с осевой намагниченностью, а ротор выполнен в виде постоянного магнита цилиндрической формы с той же осевой намагниченностью, что и статор, и установлен вовнутрь статора с воздушным зазором одноименным полюсами, слева от ротора с рабочим воздушным зазором установлены соосно с валом опорный левый кольцевой дисковый постоянный магнит, а справа от ротора с рабочим воздушным зазором установлен опорный правый кольцевой дисковый постоянный магнит, торцы левого и правого кольцевых магнитов расположены к статору и ротору одноименной полярностью, при этом ротор жестко соединен с валом.
Известен радиально-аксиальный подшипник по патенту РФ №2176039, составленный соосно расположенными магнитотвердыми коническим ротором и цилиндрическим с конусной выемкой статором, отличающийся тем, что ротор и статор намагничены единовременно при их совмещенном положении и совместном помещении в осевое магнитное поле соленоида. Новые свойства, проявляемые однонаправленным осевым намагничиванием конусного ротора и цилиндрического с конусной выемкой статора в заявляемом объекта, заключаются в обеспечении этим объектом как непрерывно возрастающей со сближением ротора и статора (вплоть до их соприкосновения) осевой жесткости магнитной системы, так и в обеспечении сопутствующего указанному сближению ротора и статора возрастанию радиальной устойчивости заявляемого подшипника, что обуславливает расширенный динамический диапазон упругих перемещений ротора в предлагаемом объекте.
Данное техническое решение, как наиболее близкое к заявленному по техническому существу и достигаемому результату, принято в качестве его прототипа.
Недостатками данного технического решения, равно как и всех известных нам аналогов, является то, что осевая жесткость магнитной системы не является непрерывно возрастающей со сближением ротора и статора. При приложении достаточно большого осевого усилия к конусному статору может возникать ситуация, когда, в силу изменения конфигурации суммарного магнитного поля, произойдет изменение суммарного усилия на ротор на противоположное и он, наоборот, будет притянут к статору, а удаление ротора от статора с другой стороны подшипника только усилит этот процесс.
Задачей заявляемого изобретения является повышение надежности работы подшипника путем обеспечение его устойчивости в осевом и радиальном направлении.
Сущность заявленного технического решения выражается в следующей совокупности существенных признаков, достаточной для решения указанной заявителем технической проблемы и получения обеспечиваемого изобретением технического результата.
Согласно изобретению магнитный подшипник, выполненный в виде двух объемных тел вращения, снабженных магнитными системами из постоянных магнитов и размещенных друг относительно друга так, что их магнитные системы взаимодействуют друг с другом через зазор, характеризуется тем, что магнитные системы этих объемных тел выполнены так, что поверхности магнитных систем в месте их взаимодействия через зазор имеют одинаковые магнитные полюса и выполнены с формами, обеспечивающими эквидистантность зазора между ними, при этом эта поверхность на одном объемном теле выполнена выпуклой, а взаимодействующая с ней поверхность на другом объемном теле выполнена вогнутой, кроме того одна из магнитных систем выполнена так, что линия равного потенциала ее магнитного поля в поперечном сечении представляет собой непрерывную линию, а одноименный полюс взаимодействующей с ней магнитной системы размещен в зоне действия ее магнитного поля.
Кроме того, заявленное техническое решение характеризуется наличием ряда дополнительных факультативных признаков, а именно:
- магнитная система на одном из объемных тел может быть выполнена из двух аксиально намагниченных магнитов с диагональным расположением полюсов, при этом оба магнита жестко соединены между собой, а взаимодействующая с ней магнитная система на другом объемном теле выполнена в виде двух сборок магнитов, жестко закрепленных между собой, при чем каждая сборка состоят из трех аксиально намагниченных магнитов, а именно, двух боковых с нормальным расположением полюсов и одного центрального магнита с диагональным расположением полюсов, причем магниты одной магнитной системы расположены друг относительно друга и относительно магнитов другой магнитной системы таким образом, что центральные магниты магнитной системы с диагональным расположением полюсов обращены к магнитам другой магнитной системы одноименными с ними полюсами, а боковые магниты магнитной системы с нормальным расположением полюсов размещены таким образом, что снаружи и внутри образовавшегося между ними угла находятся стороны магнитов с одноименными полюсами, при этом крайняя точка полюса магнита этой магнитной системы, обращенная в сторону другой магнитной системы, расположена в углу, образованном одноименными полюсами боковых магнитов этой магнитной системы, и расположена от вершины этого угла на расстоянии, обеспечивающем осевое и радиальное стабилизирующее усилия, воздействующие на магнитную систему с диагональным расположением полюсов, достаточные длят стабильного положения друг относительно друга двух объемных тел подшипника при работе под нагрузкой.
- магнитная система с диагональным расположением полюсов может быть размещена на внешнем объемном теле подшипника;
- магнитная система с диагональным расположением полюсов может быть размещена на внутреннем объемном теле подшипника;
- объемное тело с одной магнитной системой может быть неподвижно закреплено, а объемное тело с другой магнитной системой установлено с возможностью осевого вращения.
Заявленная совокупность существенных признаков обеспечивает достижение технического результата, который заключается в том, что заявленное выполнение и взаимное расположение постоянных магнитов двух взаимодействующих между собой магнитных систем обеспечивает новый принцип конфигурирования линий равного потенциала магнитных полей в каждом поперечном сечении требуемой формы, обеспечивающей устойчивое взаимодействие и бесконтактное расположения постоянных магнитов двух магнитных систем магнитного подшипника в пространстве друг относительно друга при осевых нагрузках с обеспечением устойчивости объемных тел осевом и радиальном направлении.
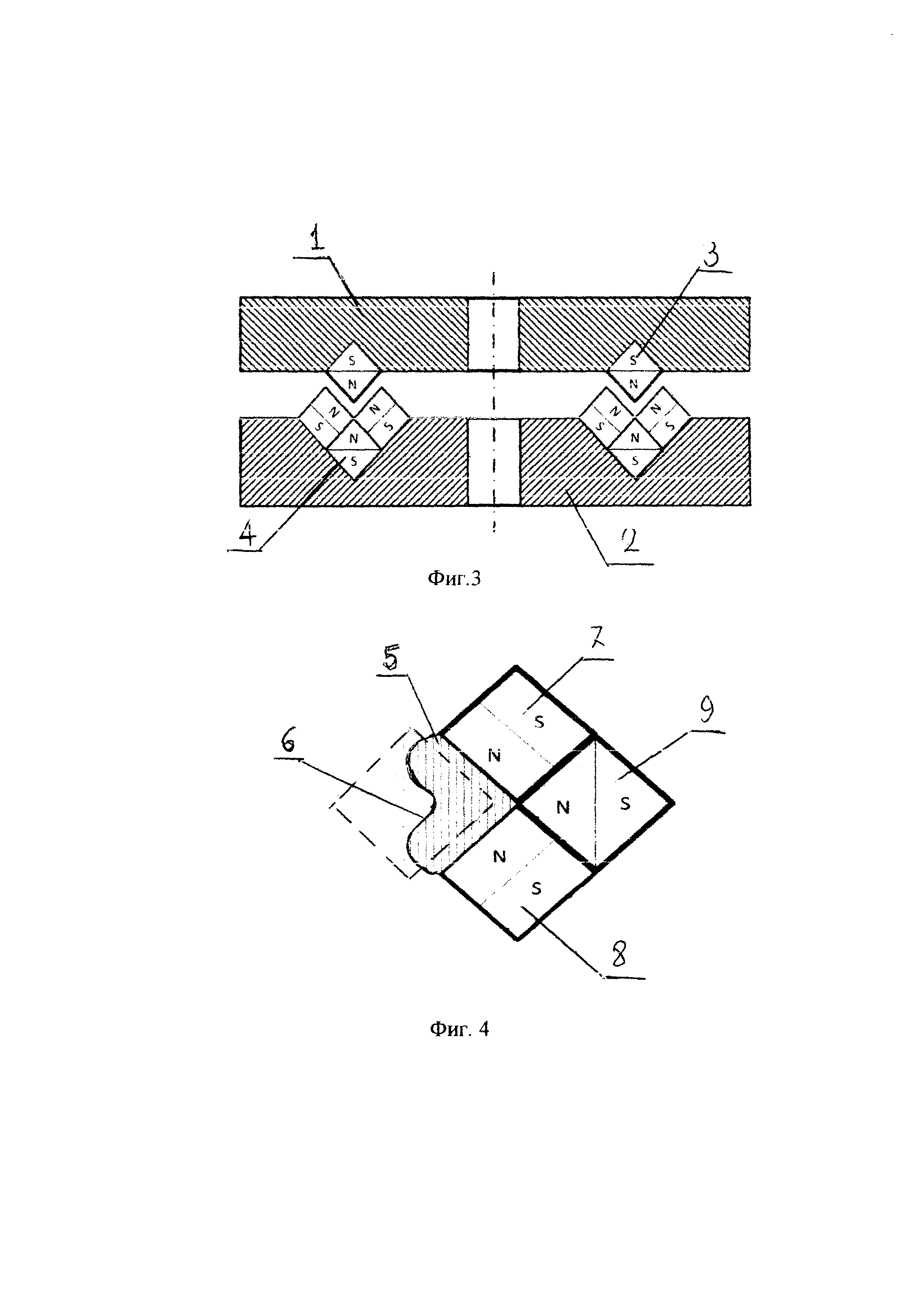
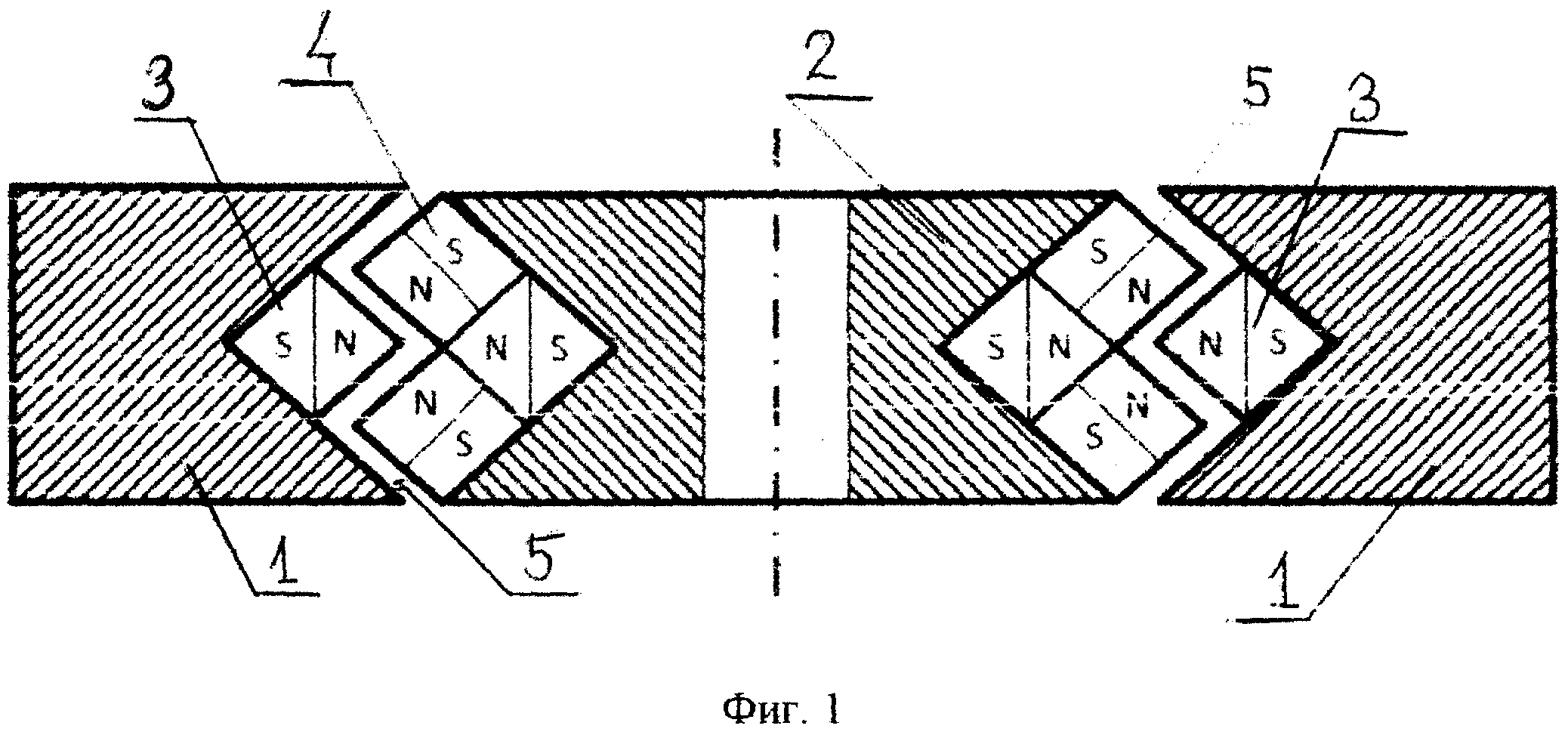
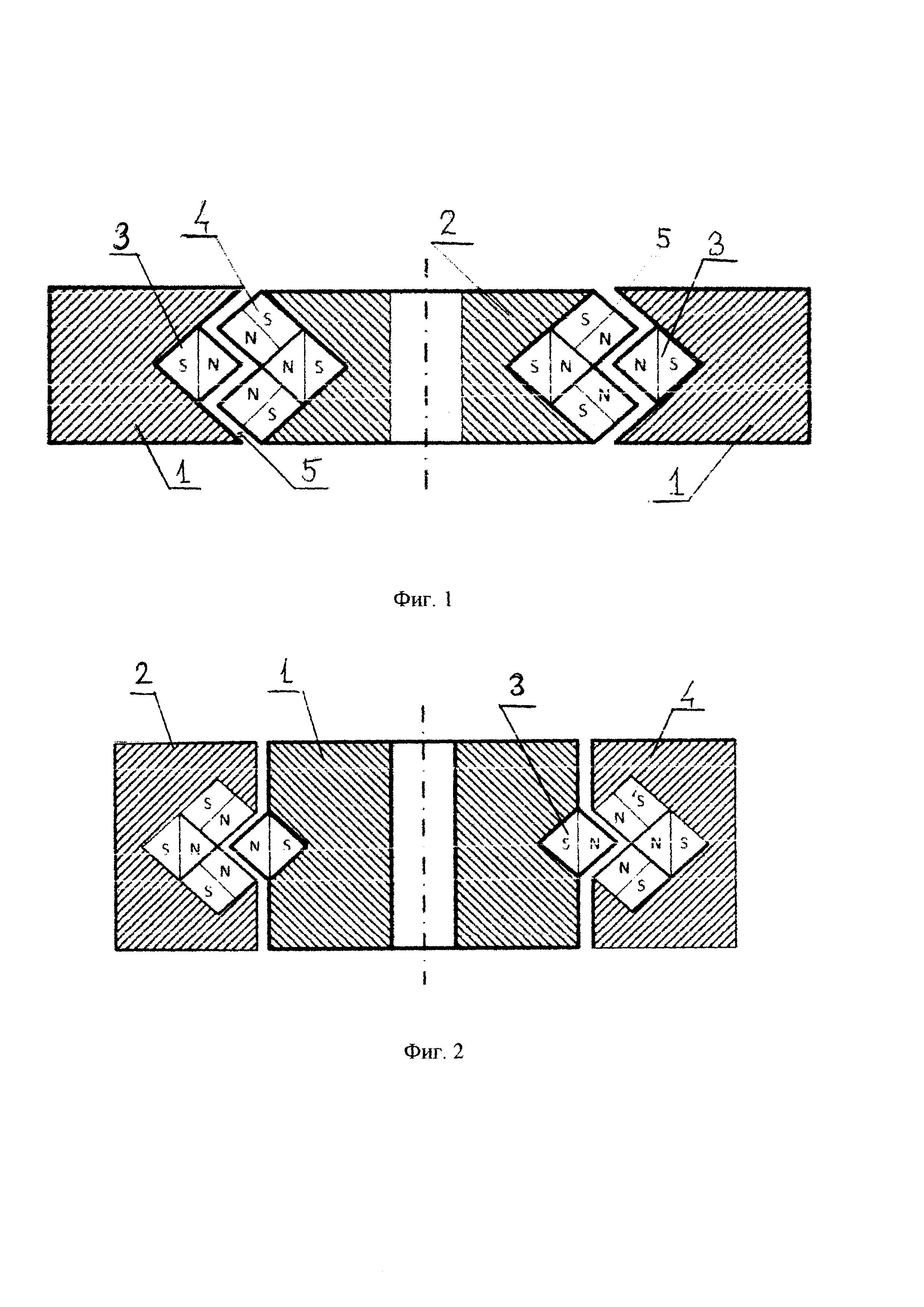
Сущность заявляемого технического решения поясняется чертежами, на которых на фиг. 1 представлена один из возможных вариантов выполнения заявленного магнитного подшипника, на фиг. 2 - другой вариант выполнения заявленного магнитного подшипника, на фиг. 3 - вариант выполнения заявленного магнитного подшипника, выполняющего функции подпятника, на фиг. 4 - пример конфигурации линии равного потенциала магнитного поля магнитной системы заявленного магнитного подшипника.
Заявленный магнитный подшипник выполненный в виде двух объемных тел вращения 1 и 2, снабженных магнитными системами 3 и 4 из постоянных магнитов и размещенных друг относительно друга так, что их магнитные системы взаимодействуют друг с другом через зазор 5. Магнитные системы объемных тел 1 и 2 выполнены так, что поверхности магнитных систем в месте из взаимодействия через зазор 5 имеют одинаковые магнитные полюса и выполнены с формами, обеспечивающими эквидистантность зазора 5 между ними.
Поверхность на объемном теле выполнена выпуклой, а взаимодействующая с ней поверхность на другом объемном теле выполнена вогнутой, кроме того одна из взаимодействующих магнитных систем выполнена так, что линия равного потенциала 6 ее магнитного поля в поперечном сечении представляет собой непрерывную линию, а одноименный полюс взаимодействующей с ней магнитной системы размещен в зоне действия ее магнитного поля.
Заявленный магнитный подшипник состоит из двух магнитно взаимосвязанных магнитных систем 3 и 4. Магнитная система 3 состоит из аксиально намагниченных магнитов с диагональным расположением полюсов, в которых линия нейтральной намагниченности проходит от одной грани к диагонально противоположной, при этом магниты этой системы 3 жестко прикреплены к объемному телу 1. Магнитная система 4 выполнена в виде двух сборок магнитов, жестко закрепленных между собой, при чем каждая сборка состоят из трех аксиально намагниченных магнитов, двух боковых магнитов 7 и 8 с нормальным расположением полюсов и одного центрального магнита 9 с диагональным расположением полюсов. Магниты магнитной системы 4 расположены друг относительно друга и относительно магнитов магнитной системы 3 таким образом, что центральные магниты 9 магнитной системы 4 с диагональным расположением полюсов обращены к магнитам магнитной системы 3 одноименными с ними полюсами, а боковые магниты 7 и 8 магнитной системы 4 с нормальным расположением полюсов размещены таким образом, что снаружи и внутри образовавшегося между ними угла находились стороны магнитов с одноименными полюсами.
Заявленный магнитный подшипник работает следующим образом.
Принцип работы магнитной системы магнитного подшипника основан на формировании магнитных полей сборок постоянных или намагниченных магнитов, как показано на фиг. 4, из которой видно, что аксиально намагниченные магниты 7 и 8 с нормальным расположением полюсов и центральный магнит 9 с диагональным расположением полюсов образуют магнитное поле с непрерывной линией равного потенциала 6 в поперечном сечении, что и является основой для обеспечения работоспособности магнитного подшипника в целом.
Магнитная система заявленного магнитного подшипника может быть выполнена в нескольких варианта, два из которых показаны на фиг. 1 и фиг. 2. В варианте, представленном на фиг. 1, магнитная система 3 расположена на объемном теле 1, являющимся в данном случае статором подшипника, а взаимодействующая с ней магнитная система 4 установлена на объемном теле 2, являющимся в данном случае ротором подшипника. На фиг. 2 представлено противоположное размещение магнитных систем на объемных телах подшипника. На фиг. 3 магнитные системы 3 и 4 на объемных телах 1 и 2 расположены не на торцевых, а на боковых поверхностях объемных тел 1 и 2 так что их поперечные оси параллельны оси вращения такого подшипника, который может выполнять функции магнитного подпятника.
Рассматриваемая система устойчива при соблюдении условия нахождения крайней точки полюса магнита магнитной системы 3, обращенной в сторону центрального магнита 9 магнитной системы 4, в углу, образованном одноименными полюсами боковых магнитов 7 магнитной системы 4, и расположена от вершины этого угла на расстоянии, обеспечивающем осевое и радиальное стабилизирующее усилия, воздействующие на магнитную систему 3, за счет ее расположения в магнитном поле с непрерывной линией равного потенциала 6 в поперечном сечении, что обеспечивает ее стабильное положение в пространстве.
Заявленное устройство может быть реализовано с использованием известного оборудования, технических и технологических средств и предназначено для использования в конструкциях подшипников и подпятников, заменяющих традиционные радиальные и упорные подшипники.
Магнитолевитационное транспортное средство
Стрелочный перевод магнитолевитационных транспортных средств
Устройство динамической стабилизации магнитолевитационного транспортного средства
Магнитолевитационное транспортное средство
Система охлаждения вакуумного трубопровода магнитолевитационного транспорта
Магнитолевитационное транспортное средство

