Результат интеллектуальной деятельности: СИСТЕМА И СПОСОБ ДИНАМИЧЕСКОГО ОПРЕДЕЛЕНИЯ И КОРРЕКЦИИ ПАРАМЕТРОВ УПРАВЛЕНИЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе и способу динамического определения и повторной коррекции параметров управления, в частности, к системе и способу динамического определения и повторной коррекции параметров управления, подходящим для врубовой машины.
УРОВЕНЬ ТЕХНИКИ
В связи с тем, что горные машины разрабатываются для обеспечения энергосберегающих, интеллектуальных операций и работы в автоматическом режиме, в области горного оборудования широко применяются энергосберегающая технология управления с преобразованием частоты и способ диагностики неисправностей. Врубовые машины относятся к полностью механизированному оборудованию для автоматизации добычи полезных ископаемых, и частота отказов приводной системы с постоянным магнитом малой дальности действия напрямую влияет на эффективность добычи угля и безопасность эксплуатации оборудования. Однако в настоящее время при применении энергосберегающей технологии управления с преобразованием частоты, определение параметров для приводной системы с постоянным магнитом малой дальности действия в основном является первоначальным определением параметров управления с преобразованием частоты в соответствии с конфигурацией параметров системы, и процессы способов диагностики неисправностей в основном выполняются автономно. В процессе резания угольной породы врубовой машиной двигатель приводной системы с постоянным магнитом малой дальности действия со временем нагревается, и в связи с этим параметры системы двигателя изменяются с изменением температуры; кроме того, при резании конечный крутящий момент зависит от твердости разрезаемого угольного пласта и, следовательно, параметры двигателя, подлежащие регулированию, также являются отличающимися. Однако в настоящее время при определения параметров системы двигателя всегда используют первоначальную определение параметров управления с преобразованием частоты в соответствии с конфигурацией параметров системы и параметры двигателя невозможно регулировать в реальном времени в соответствии с фактической обстановкой. Следовательно, в таком способе присутствует потенциальный риск, поскольку очень сложно гарантировать, что данные, используемые в модели, применяемой в системе управления, будут полностью соответствовать данным машины в рабочих условиях в реальном времени. В результате, разработанные параметры управления не соответствуют фактическим условиям, способ не может обеспечить ожидаемого эффекта управления, не может улучшить эффективность резания, не может экономить энергию, не может снизить частоту отказов и напрямую влияет на безопасную и надежную работу режущего блока врубовой машины.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Учитывая вышеупомянутые проблемы в предшествующем уровне техники, настоящее изобретение предусматривает систему и способ динамического определения и повторной коррекции параметров управления, обеспечивающих возможность корректировки параметров управления в реальном времени в соответствии с полученными рабочими данными в реальном времени в процессе работы приводной системы с постоянным магнитом малой дальности действия, и тем самым обеспечивающих возможность повышения эффективности резки, экономии энергии, снижения частоты отказов и обеспечения безопасной и надежной работы режущего блока врубовой машины.
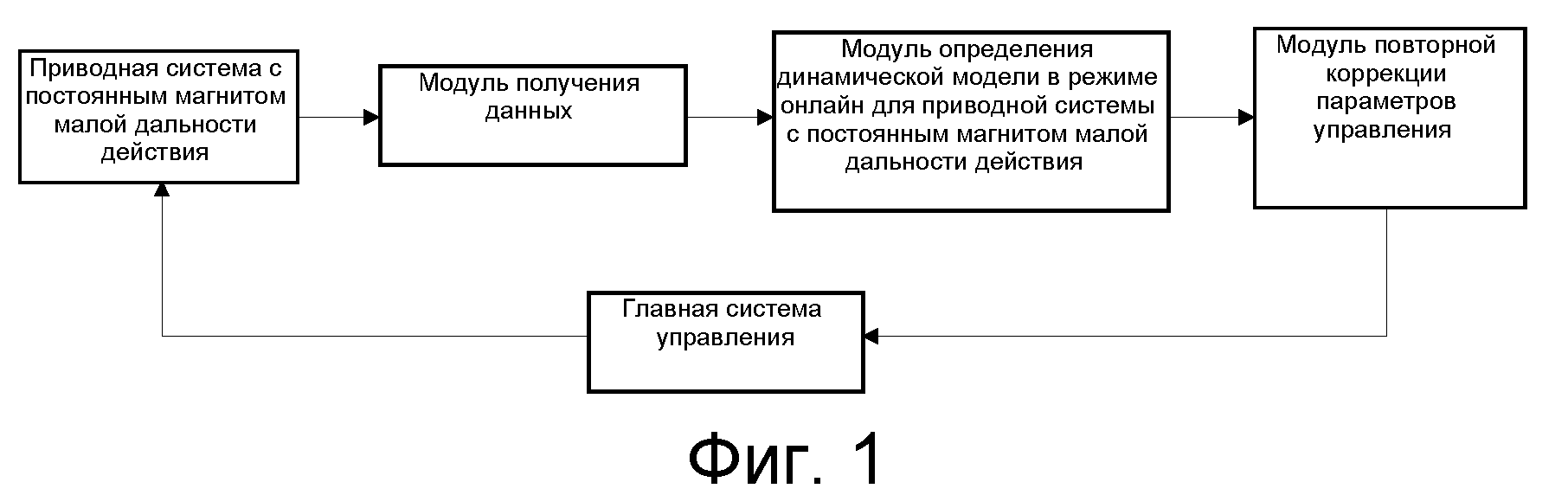
Для решения задачи, описанной выше, настоящее изобретение применяет следующую техническую схему: система динамического определения и повторной коррекции параметров управления содержит модуль сбора данных, модуль определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия, модуль повторной коррекции параметров управления и главную систему управления, причем модуль сбора данных получает и передает рабочие данные приводной системы с постоянным магнитом малой дальности действия в модуль определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия, а модуль определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия определяет данные, полученные модулем сбора данных и вводит результат определения в модуль повторной коррекции параметров управления, при этом модуль повторной коррекции параметров управления корректирует и упорядочивает параметры управления приводной системы с постоянным магнитом малой дальности действия в соответствии с результатом определения, относящимся к приводной системе с постоянным магнитом малой дальности действия, и выводит скорректированные параметры управления в главную систему управления, и главная система управления управляет работой приводной системы с постоянным магнитом малой дальности действия в соответствии со скорректированными параметрами управления.
Кроме того, модуль определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия содержит блок определения в реальном времени параметров системы двигателя, блок определения крутящего момента на оконечной нагрузке, и блок определения формы колебаний конструкции приводной системы с постоянным магнитом малой дальности действия; причем блок определения в реальном времени параметров системы двигателя выполняет определение параметра системы двигателя в реальном времени на основе рабочих данных приводной системы с постоянным магнитом малой дальности действия, полученных модулем сбора данных, и вводит результат определения параметров системы двигателя в реальном времени в модуль повторной коррекции параметров управления; а блок определения крутящего момента на оконечной нагрузке определяет заданный сигнал крутящего момента на выходе двигателя и сигнал обратной связи фактического крутящего момента на оконечной нагрузке из рабочих данных приводной системы с постоянным магнитом малой дальности действия, полученных модулем сбора данных, и вводит результат определения в модуль повторной коррекции параметров управления; причем блок определения формы колебаний конструкции приводной системы с постоянным магнитом малой дальности действия выполняет определение форма колебаний конструкции для системы зубчатой передачи на основе данных, полученных модулем сбора данных, и вводит результат определения в модуль повторной коррекции параметров управления.
Способ динамического определения и повторной коррекции параметров управления включает следующие этапы:
А. получение данных:
во время работы приводной системы с постоянным магнитом малой дальности действия модуль сбора данных получает рабочие данные приводной системы с постоянным магнитом малой дальности действия в реальном времени и передает рабочие данные в модуль определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия, причем рабочие данные содержат параметр системы двигателя в реальном времени, заданный сигнал крутящего момента на выходе двигателя, сигнал обратной связи фактического крутящего момента на оконечной нагрузке, скорость двигателя, частоту зацепления зубчатой передачи и ускорение приводной системы;
В. определение данных:
модуль определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия считывает данные, полученные модулем сбора данных; блок определения в реальном времени параметров системы двигателя, блок определения крутящего момента на оконечной нагрузке и блок определения форма колебаний конструкции приводной системы с постоянным магнитом малой дальности действия считывают и определяют параметры системы двигателя в реальном времени, заданный сигнал крутящего момента на выходе двигателя, сигнал обратной связи фактического крутящего момента на оконечной нагрузке, скорость двигателя, частоту зацепления зубчатой передачи и ускорение приводной системы, соответственно, и вводят определенные данные в модуль повторной коррекции параметров управления, соответственно;
C. повторную коррекцию параметров управления:
модуль повторной коррекции параметров управления выполняет сравнение и анализ данных, определенных модулем определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия с первоначально заданными параметрами управления, корректирует первоначально заданные параметры управления в соответствии с определенными данными, и затем вводит скорректированные параметры управления в главную систему управления;
D. регулировку работы приводной системы с постоянным магнитом малой дальности действия:
главная система управления контролирует и упорядочивает рабочие данные приводной системы с постоянным магнитом малой дальности действия, в соответствии со скорректированными параметрами управления.
Кроме того, конкретные процессы определения, выполняемые блоком определения в реальном времени параметров системы двигателя, блоком определения крутящего момента на оконечной нагрузке и блоком определения формы колебаний конструкции приводной системы с постоянным магнитом малой дальности действия являются следующими:
процесс определения, выполняемый блоком определения в реальном времени параметров системы двигателя, выполняют следующим образом: полученные рабочие данные приводной системы с постоянным магнитом малой дальности действия вычисляют и обрабатывают в соответствии с первоначальными определенными параметрами системы двигателя с последующей установкой интервала времени определения, равным 10 минут, для обеспечения блоку определения в реальном времени параметров системы двигателя возможности выполнения автоматического определения каждые 10 минут, причем конкретное определение заключается в том, что параметр системы двигателя, полученный в предыдущий момент, обновляется в реальном времени при помощи улучшенного рекурсивного алгоритма наименьших квадратов, и полученный в каждый момент результат определения вводят в модуль повторной коррекции параметров управления;
процесс определения, выполняемый блоком определения крутящего момента на оконечной нагрузке, выполняют следующим образом: заданный сигнал крутящего момента на выходе двигателя и сигнал обратной связи фактического крутящего момента на оконечной нагрузке определяют из полученных рабочих данных приводной системы с постоянным магнитом малой дальности действия, причем конкретное определение заключается в том, что для эквивалентного моделирования используют систему первого порядка и модель линии задержки путем считывания заданного сигнала крутящего момента на выходе двигателя и сигнала обратной связи крутящего момента на оконечной нагрузке, время задержки и постоянную времени системы первого порядка сравнивают, и затем определенные данные вводят в модуль повторной коррекции параметров управления;
процесс определения, выполняемый блоком определения формы колебаний конструкции приводной системы с постоянным магнитом малой дальности действия, выполняют следующим образом: сигналы во временной области, в том числе скорость двигателя, частота зацепления зубчатой передачи и ускорение приводной системы, определяют и считывают из полученных рабочих данных приводной системы с постоянным магнитом малой дальности действия, сигналы во временной области преобразуют в сигналы частотного спектра для получения распределения плотности спектра мощности, и затем анализируют формы колебаний конструкции приводной системы с постоянным магнитом малой дальности действия и вводят в модуль повторной коррекции параметров управления.
Кроме того, конкретный процесс повторной коррекции параметров управления выполняют следующим образом: модуль повторной коррекции параметров управления выполняет сопоставление каждого из рабочих параметров в реальном времени, определенных модулем определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия, с первоначально заданными параметрами управления; если какой-либо из рабочих параметров в реальном времени не соответствует соответствующему первоначально заданному параметру управления, повторно устанавливают модель повторной коррекции для параметров управления на основе рабочих параметров в реальном времени, и получают параметр управления в модели повторной коррекции, и наконец скорректированные параметры управления вводят в главную систему управления.
По сравнению с предшествующим уровнем техники настоящее изобретение использует комбинацию модуля сбора данных, модуля определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия и модуля повторной коррекции параметров управления. При работе приводной системы с постоянным магнитом малой дальности действия врубовой машины, после получения рабочих данных приводной системы в реальном времени и определения полученных рабочих данных, результат определения вводится в модуль повторной коррекции параметров управления; затем модуль повторной коррекции параметров управления выполняет корректировку параметров управления в реальном времени, так что параметр управления в реальном времени сопоставляется с параметром, требуемым для фактической работы, с достижением таким образом ожидаемого эффекта управления, улучшением эффективности резки, сохранением энергии, снижением частоты отказов и обеспечением безопасной и надежной работы режущего блока врубовой машины.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1 представлена блок-схема всей конструкции системы согласно настоящему изобретению; и
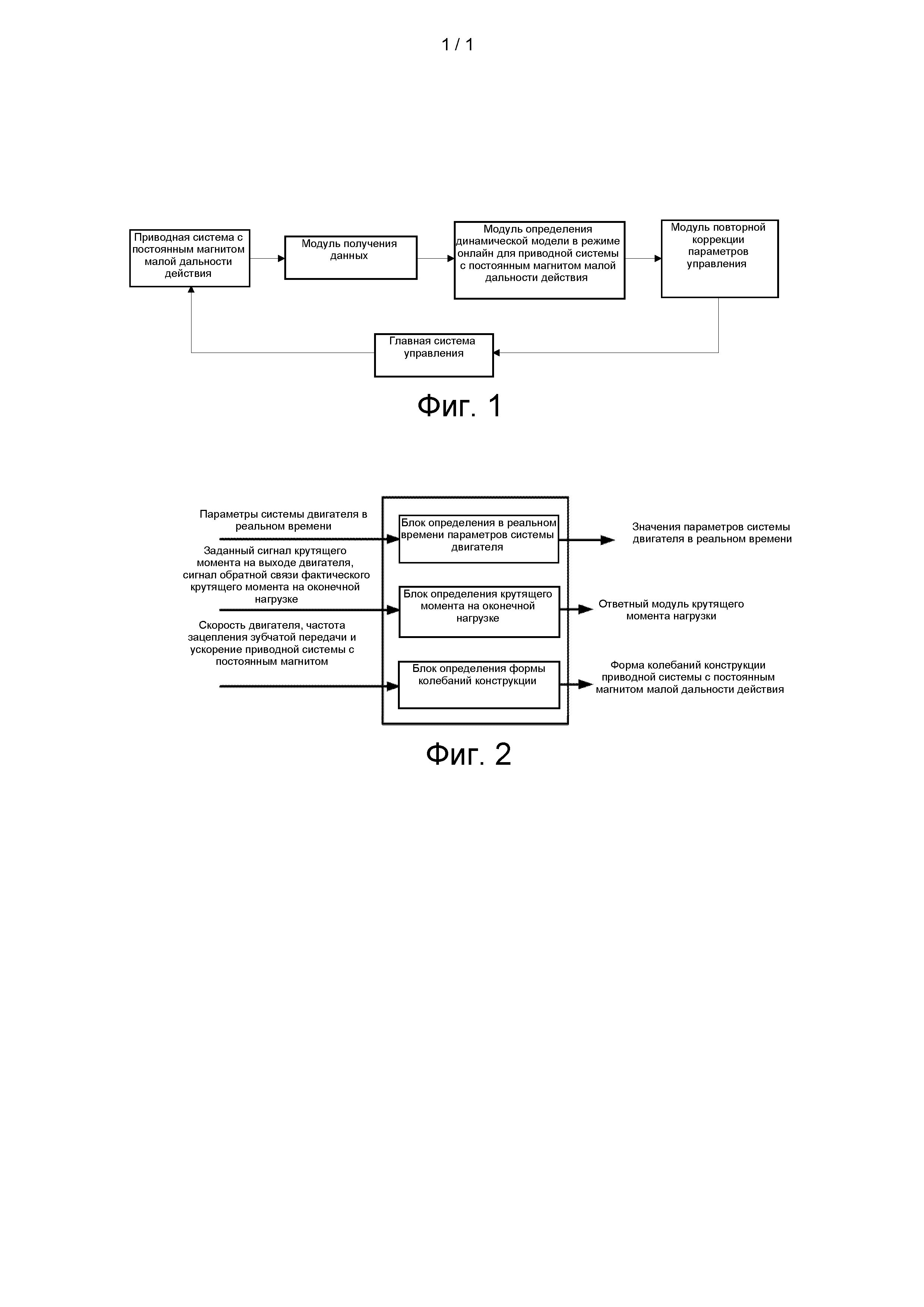
На фиг. 2 представлена блок-схема принципа работы модуля определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия согласно настоящему изобретению.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее в данном документе настоящее изобретение будет более подробно описано со ссылкой на варианты осуществления и чертежи.
Как показано на фиг. 1, в настоящем изобретении предложена система динамического определения и повторной коррекции параметров управления, содержащая модуль сбора данных, модуль определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия, модуль повторной коррекции параметров управления и главную систему управления, причем модуль сбора данных получает и передает рабочие данные приводной системы с постоянным магнитом малой дальности действия в модуль определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия, а модуль определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия определяет данные, полученные модулем сбора данных, и вводит результат определения в модуль повторной коррекции параметров управления, при этом модуль повторной коррекции параметров управления корректирует и упорядочивает параметры управления приводной системы с постоянным магнитом малой дальности действия в соответствии с результатом определения, относящимся к приводной системе с постоянным магнитом малой дальности действия и выводит скорректированные параметры управления в главную систему управления, и главная система управления управляет работой приводной системы с постоянным магнитом малой дальности действия в соответствии со скорректированными параметрами управления.
Как показано на фиг. 2, модуль определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия дополнительно содержит блок определения в реальном времени параметров системы двигателя, блок определения крутящего момента на оконечной нагрузке и блок определения формы колебаний конструкции приводной системы с постоянным магнитом малой дальности действия; причем блок определения в реальном времени параметра системы двигателя выполняет определение параметра системы двигателя в реальном времени на основе рабочих данных приводной системы с постоянным магнитом малой дальности действия, полученных модулем сбора данных, и вводит результат определения параметров системы двигателя в реальном времени в модуль повторной коррекции параметров управления; а блок определения крутящего момента на оконечной нагрузке определяет заданный сигнал крутящего момента на выходе двигателя и сигнал обратной связи фактического крутящего момента на оконечной нагрузке из рабочих данных приводной системы с постоянным магнитом малой дальности действия, полученных модулем сбора данных, и вводит результат определения в модуль повторной коррекции параметров управления; причем блок определения формы колебаний конструкции приводной системы с постоянным магнитом малой дальности действия выполняет определение форма колебаний конструкции для системы зубчатой передачи на основе данных, полученных модулем сбора данных, и вводит результат определения в модуль повторной коррекции параметров управления.
В настоящем изобретении дополнительно предложен способ динамического определения и повторной коррекции параметров управления для врубовых машин, включающий следующие этапы:
А. получение данных:
во время работы приводной системы с постоянным магнитом малой дальности действия модуль сбора данных получает рабочие данные приводной системы с постоянным магнитом малой дальности действия в реальном времени и передает рабочие данные в модуль определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия, причем рабочие данные содержат параметр системы двигателя в реальном времени, заданный сигнал крутящего момента на выходе двигателя, сигнал обратной связи фактического крутящего момента на оконечной нагрузке, скорость двигателя, частоту зацепления зубчатой передачи и ускорение приводной системы;
B. определение данных:
модуль определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия считывает данные, полученные модулем сбора данных; блок определения в реальном времени параметров системы двигателя, блок определения крутящего момента на оконечной нагрузке и блок определения формы колебаний конструкции приводной системы с постоянным магнитом малой дальности действия считывают и определяют параметры системы двигателя в реальном времени, заданный сигнал крутящего момента на выходе двигателя, сигнал обратной связи фактического крутящего момента на оконечной нагрузке, скорость двигателя, частоту зацепления зубчатой передачи и ускорение приводной системы соответственно, и вводят определенные данные в модуль повторной коррекции параметров управления соответственно;
C. повторную коррекцию параметров управления:
модуль повторной коррекции параметров управления выполняет сравнение и анализ данных, определенных модулем определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия, с первоначально заданными параметрами управления, корректирует первоначально заданные параметры управления в соответствии с определенными данными, и затем вводит скорректированные параметры управления в главную систему управления;
D. регулировку работы приводной системы с постоянным магнитом малой дальности действия:
главная система управления контролирует и упорядочивает рабочие данные приводной системы с постоянным магнитом малой дальности действия в соответствии со скорректированными параметрами управления.
Кроме того, конкретные процессы определения, выполняемые блоком определения в реальном времени параметров системы двигателя, блоком определения крутящего момента на оконечной нагрузке и блоком определения формы колебаний конструкции приводной системы с постоянным магнитом малой дальности действия, являются следующими:
процесс определения, выполняемый блоком определения в реальном времени параметров системы двигателя, выполняют следующим образом: полученные рабочие данные приводной системы с постоянным магнитом малой дальности действия вычисляют и обрабатывают в соответствии с первоначальными определенными параметрами системы двигателя с последующей установкой интервала времени определения, равным 10 минут, для обеспечения блоку определения в реальном времени параметров системы двигателя возможности выполнения автоматического определения каждые 10 минут; причем конкретное определение заключается в использовании улучшенного рекурсивного алгоритма наименьших квадратов, введении формулы рекурсии P(k)=F-1(k) в улучшенный рекурсивный алгоритм наименьших квадратов, упрощении алгоритма квадратов по принципу матричной инверсии  и, наконец, введении фактора исключения в диапазоне значений 0,95-0,99, таким образом, что параметры системы двигателя, полученные в предыдущий момент, обновляются в реальном времени, и затем полученный в каждый момент результат определения вводят в модуль повторной коррекции параметров управления;
и, наконец, введении фактора исключения в диапазоне значений 0,95-0,99, таким образом, что параметры системы двигателя, полученные в предыдущий момент, обновляются в реальном времени, и затем полученный в каждый момент результат определения вводят в модуль повторной коррекции параметров управления;
процесс определения, выполняемый блоком определения крутящего момента на оконечной нагрузке, выполняют следующим образом: заданный сигнал крутящего момента на выходе двигателя и сигнал обратной связи фактического крутящего момента на оконечной нагрузке определяют из полученных рабочих данных приводной системы с постоянным магнитом малой дальности действия, причем конкретное определение заключается в том, что для эквивалентного моделирования используют система первого порядка и модель линии задержки путем считывания заданного сигнала крутящего момента на выходе двигателя и сигнала обратной связи крутящего момента на оконечной нагрузке, время задержки и постоянную времени системы первого порядка получают путем сравнения, и затем определенные данные вводят в модуль повторной коррекции параметров управления;
процесс определения, выполняемый блоком определения формы колебаний конструкции приводной системы с постоянным магнитом малой дальности действия, выполняют следующим образом: сигналы во временной области, в том числе скорость двигателя, частота зацепления зубчатой передачи и ускорение приводной системы, определяют и считывают из полученных рабочих данных приводной системы с постоянным магнитом малой дальности действия, сигналы во временной области преобразуют в сигналы частотного спектра для получения распределения плотности спектра мощности, и затем анализируют формы колебаний конструкции приводной системы с постоянным магнитом малой дальности действия и вводят в модуль повторной коррекции параметров управления.
Кроме того, конкретный процесс повторной коррекции параметров управления выполняют следующим образом: модуль повторной коррекции параметров управления выполняет сопоставление каждого из рабочих параметров в реальном времени, определенных модулем определения динамической модели в режиме онлайн для приводной системы с постоянным магнитом малой дальности действия, с первоначально заданными параметрами управления; если какой-либо из рабочих параметров в реальном времени не соответствует соответствующему первоначально заданному параметру управления, повторно устанавливают модель повторной коррекции для параметров управления на основе рабочих параметров в реальном времени, и получают параметр управления в модели повторной коррекции, и наконец скорректированные параметры управления вводят в главную систему управления.
Соединительное устройство для подъемных канатов шахтного подъемника и способ измерения, осуществляемый посредством указанного устройства
Способ предотвращения и контроля внезапных зональных выбросов угля и газа
Просеивающее твердый материал устройство для подземной разработки с закладкой
Подъемная платформа шахтного подъемника и способ подъема
Способ заполнения шпура под анкер, пробуренного в кровле выработки, картриджами со смолой
Система транспортировки человека на дальнее расстояние по наклонной выработке
Способ получения подавляющей горение суспензии, содержащей измельчённую топливную золу, для локализации пожаров на угольных месторождениях
Система и способ автоматического регулирования натяжения направляющих канатов подвесной платформы с гибким кабелем
Аварийный буфер подъемника
Способ и механическое устройство предотвращения отклонения направляющего каната
Плавильный тигель и аппарат и способ сбора флотационной пены в плавильном тигле
Способ извлечения ванадия и хрома из ванадиево-хромовых шлаков
Система охлаждения
Система охлаждения
Беспроводная система определения положения угольного комбайна и способ вырубки
Способ корреляционного моделирования нарушения соединения критических компонентов подъемника для глубокой скважины в условиях неполной информации
Устройство и способ для распределенного определения прямолинейности рабочей поверхности скребкового конвейера на основе волоконно-оптического измерения
Многоступенчатый многоцелевой гидравлический нагнетатель с регулируемой скоростью нагнетания
Способ получения оксида ванадия батарейного сорта
Способ и система для ускоренной выплавки меди

