Результат интеллектуальной деятельности: Способ управления космическим аппаратом дистанционного зондирования Земли
Вид РИД
Изобретение
Назначение
Изобретение относится к космической технике в области управления космическим аппаратом (КА), осуществляющим дистанционное зондирование Земли (ДЗЗ).
Уровень техники
Управление КА включает в себя, прежде всего, управление ориентацией КА для получения нужного положения корпуса КА относительно внешних ориентиров (управление вращательным движением КА вокруг центра масс).
После вывода КА на орбиту управление угловым положением с целью ориентации приборов КА на изучаемые объекты становится главным режимом полета (см. В.Н. Васильев. Системы ориентации космических аппаратов, М., 2009, с. 10-11), поэтому важнейшей задачей современной космической техники является совершенствование системы ориентации, позволяющей в течение длительного времени определить с высокой точностью направления осей КА относительно осей некоторой системы координат, т.е. угловое положение КА, а также его угловую скорость.
По точности, среди известных средств определения положения КА в пространстве (с использованием измерений относительно небесных светил: Солнца, Земли, звезд), а именно, солнечных датчиков (СД или ПОС-приборов ориентации по Солнцу), датчиков ИК-вертикали (ПОЗ-приборов ориентации по Земле), магнитометров, звездных датчиков (ЗД) и т.д., предпочтение отдается звездным датчикам (см. патент, РФ, №2669481).
Для ЗД звезды являются бесконечно удаленными объектами, положение которых в инерциальной системе координат не меняются, т.е. ориентация относительно очень далеких объектов дает информацию об ориентации в инерциальной системе координат. Однако звездный датчик зависит от внешних ориентиров, при отсутствии в поле зрения которых он не работает, а также других факторов (например, засветка поля зрения прибора или превышение максимальной угловой скорости, наличие помех, вызванных искусственными спутниками Земли или звездами, не включенными в каталог и т.д.). Поэтому целесообразно использовать более одного датчика, с разнесенными осями визирования. Для повышения надежности и непрерывного определения параметров движения КА целесообразно использовать совместную работу датчиков угловой скорости (датчика текущей угловой скорости КА) и звездного датчика (датчика положения КА) в сочетании с менее точными датчиками ориентации (например, прибором ориентации по Земле (ПОЗ)) или трехмерным магнитометром (ТМ), определяющим вектор геомагнитного поля Земли.
Таким образом, совмещая различные типы датчиков, можно получить систему, способную функционировать с высокой точностью ориентации.
Сегодня промышленно выпускаемые ЗД - это полностью автономные трехосные универсальные приборы для определения ориентации по изображениям звезд (см. патент, РФ, 2577558). Однако, учитывая то, что звездные датчики функционируют в условиях с существенной неопределенностью и относятся к средствам космической техники критического назначения, увеличение ограниченным количеством ЗД не является оптимально достаточным для обеспечения живучести КА, а также обеспечения требуемых текущих характеристик КА.
Таким образом, при проектировании КА, более рациональным является повышение надежности и живучести КА за счет использования сочетанных с ЗД способов определения положения КА с оптимизацией структурного построения имеющихся устройств для работоспособности системы ориентации и с учетом жестких требований по массе и габаритам КА введения минимально необходимых технических устройств.
Такой принцип применяется в способе и устройстве управления движением космического аппарата с управляемой ориентацией (патент, РФ, №2669481), который является наиболее близким к предлагаемому изобретению и взятый авторами за прототип.
Способ управления движением КА с управляемой ориентацией (прототипа) заключается в автоматической компенсации ошибок бесплатформенной системы ориентации, входящей в систему управления ориентацией КА, вызванных систематическими погрешностями блока датчиков угловой скорости, в сравнении показаний блока датчиков угловой скорости с показаниями блока звездных датчиков в устройствах коррекции ошибки, в выработке сигналов коррекции систематических погрешностей блока датчиков угловой скорости, в обработке их в микро ЭВМ, в управлении микро ЭВМ исполнительными органами для обеспечения ими соответствующего механического воздействия на корпус КА по рысканью, крену и тангажу, в ориентировании КА на заданной орбите с помощью устройства ориентиров первого типа, в автоматической установке солнечных батарей по солнечному датчику в фиксированное положение относительно корпуса КА для получения максимальной их освещенности, гарантирующих положительный энергобаланс при любых каких-либо сбоях в работе системы ориентации, в том числе сбоях в работе центральной ЭВМ, посредством управления с центра наземного управления устройством управления ориентацией солнечных батарей по жесткой логике при сбоях, во включении и выключении блока звездных датчиков для управления ориентацией КА по заданному управляемому алгоритму и по командам управления с центра наземного управления.
Недостатком прототипа является оптимально недостаточное использование рациональных решений по повышению надежности способа управления КА и его живучести за счет обоснованного комплексного и совокупного использования резервирования, избыточности, мажоритирования и т.д. в составляющих управления ориентацией КА, а также алгоритма и последовательности работы при сбоях и выходе их из строя, что не может гарантировать достижение выдвигаемых на сегодня высоких требований по сроку активного существования КА ДЗЗ (более 10 лет).
В соответствии с ГОСТ Р 56526-2015 надежность - это совокупность свойств, характеризующих способность КА обеспечивать в процессе функционирования получение заданного в техническом задании выходного эффекта при заданных условиях и режимах эксплуатации, а живучесть - способность составляющих управления ориентацией КА выполнять свои основные функции, несмотря на полученные повреждения.
Следует отметить, что основные свойства надежности - это безотказность, долговечность, сохраняемость, а живучести - безопасность функционирования, приспособляемость к условиям аномальных ситуаций с регенерацией функций бортовой системы, возобновляемость функциональной готовности КА к мониторингу Земли (см. Р.В. Ахметов, В.П. Макаров, А.В. Соллогуб. Особенности управления живучестью космических аппаратов мониторинга Земли. Известия Самарского государственного аэрокосмического университета, 4(35), 2012 г.).
Целью предлагаемого способа управления космическим аппаратом дистанционного зондирования Земли является повышение надежности и живучести КА при его длительной автономной эксплуатации в космосе.
Раскрытие изобретения
Предлагаемый способ управления космическим аппаратом дистанционного зондирования Земли заключается в том, что автоматически устанавливают на орбите по солнечному датчику солнечные батареи, не жестко закрепленные с корпусом космического аппарата, в фиксированное положение относительно корпуса КА с помощью устройства управления ориентацией солнечных батарей для получения максимальной их освещенности, гарантирующих положительный энергобаланс при каких-либо сбоях в работе системы ориентации, в том числе, сбоях в работе центральной ЭВМ, управляют с наземного комплекса управления устройством управления ориентацией солнечных батарей по жесткой логике при сбоях, ориентируют космический аппарат на заданной орбите с помощью блока датчиков угловой скорости, микроЭВМ, датчика ориентации в виде прибора ориентации по Земле или трехмерного магнитометра, входящих в бесплатформенный инерциальный блок, ошибки которого, вызванные погрешностями блока датчиков угловой скорости, ошибками микроЭВМ при интегрировании кинематического уравнения и неточностями задания вектора угловой орбитальной скорости, компенсируют путем сравнения в устройствах коррекции ошибки с показаниями блока звездных датчиков, выполненного по избыточной схеме с резервированием, управляют по сигналам микроЭВМ исполнительными органами для создания ими необходимого крутящего момента, воздействующего на корпус космического аппарата для управления его угловым положением и для сброса кинетического момента.
Сущность изобретения заключается в том, что для солнечных батарей, панели которых жестко закреплены на корпусе космического аппарата, используют поворот корпуса космического аппарата в режиме «пассивной» закрутки для ориентации солнечных батарей на Солнце, и каждый раз на время проведения целевой работы производят разворот корпуса космического аппарата из режима солнечной ориентации в орбитальную ориентацию в режим активной ориентации, затем по окончании целевой работы производят разворот корпуса космического аппарата в режим «пассивной» закрутки с ориентацией солнечных батарей на Солнце, при этом проведение целевой работы осуществляют только при условии достижения текущего значения остаточной емкости аккумуляторной батареи достаточного для целевой работы и прохождения космическим аппаратом теневого участка, а в случае возникновения аномальной ситуации по достаточности остаточной емкости аккумуляторной батареи целевую работу прекращают и ориентируют солнечные батареи на Солнце.
Для описания конечного поворота космического аппарата от приборной системы координат, определяемой посадочным местом блока звездных датчиков, ко второй экваториальной системе координат (инерциальной) используют математический аппарат кватернионов и параметры Родрига-Гамильтона, которые не вырождаются при любом угловом положении космического аппарата; при нарушении в работе или выходе из строя датчика ориентации, ориентир углового положения космического аппарата определяют по звездам и блок звездных датчиков в дежурном "ресурсосберегающем" режиме включают при достижении заданной предельно допустимой низкой точности ориентации космического аппарата из-за ухода приборного базиса; при выходе из строя блока датчиков угловой скорости в качестве сигнала вектора угловой скорости космического аппарата используют среднее значение угловой скорости блока звездных датчиков; высокую надежность составляющих системы ориентации обеспечивают за счет того, что микроЭВМ выполняют в виде мажоритированной трехканальной структуры, исполнительные органы, блок датчиков угловой скорости выполняют по избыточной системе, а устройство формирования механического момента в электромагнитной системе управления выполняют по схеме резервирования.
В результате достигается высокая надежность и живучесть КА ДЗЗ за счет:
• обеспечения гарантирующего положительного энергобаланса;
• обеспечения "ресурсосберегающего" режима блока звездных датчиков, относящихся к средствам космической техники критического назначения;
• совместной работы блока датчиков угловой скорости и блока звездных датчиков в сочетании с датчиками ориентиров первого типа (ПОЗ или ТМ);
• достаточности текущего значения остаточной емкости аккумуляторной батареи для целевой работы и прохождения КА теневого участка орбиты;
• использования рационального алгоритма работы бесплатформенного инерциального блока в системе ориентации в различных режимах;
• использования составляющих системы ориентации КА, обладающих высокой надежностью.
Под ориентиром первого типа подразумевается опорный ориентир, который невозможно спутать с другим и нет причин ожидать больших помех в аппаратуре от каких-то источников, не связанных с искомым ориентиром. Таким ориентиром является Солнце - источник мощнейшего излучения практически во всем диапазоне волн. Другим таким ориентиром может являться Земля, имеющая большие угловые размеры и достаточно сильное излучение как дневной, так и ночной стороны в инфракрасной части спектра. То же самое можно сказать о поиске заданного направления в магнитном поле Земли, т.е. вектора геомагнитного поля Земли (см. Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией космических аппаратов. - М.: Наука, 1974. - стр. 81).
Графические иллюстрации
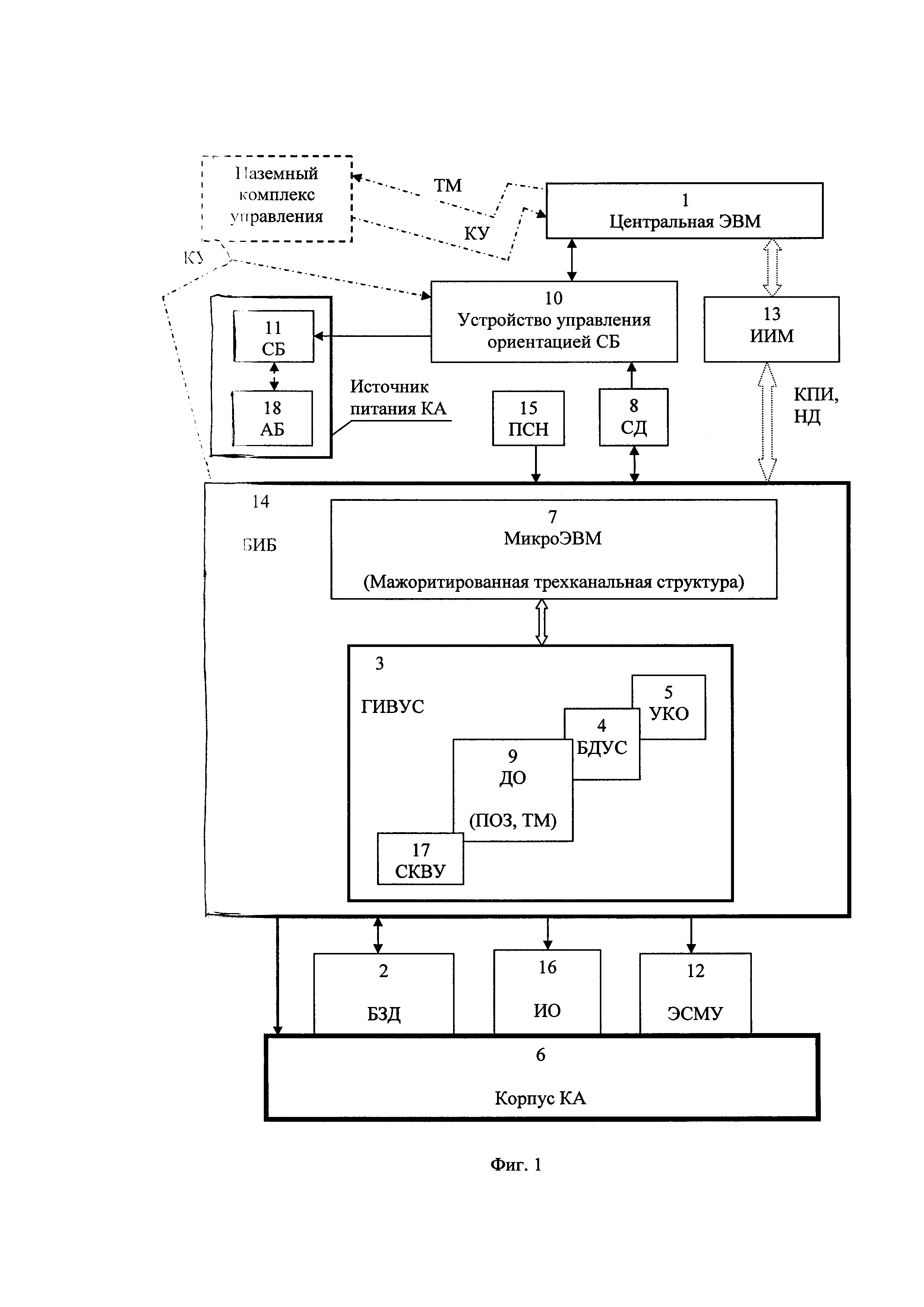
На приведенной графической фигуре приведен пример исполнения в виде структурной схемы для реализации заявляемого способа управления космическим аппаратом дистанционного зондирования Земли, содержащей составляющие, обозначенные позициями на Фиг. 1:
- Центральная ЭВМ (электронно-вычислительное устройство) - 1;
- БЗД (блок звездных датчиков) - 2;
- ГИВУС (гироскопический измеритель вектора угловой скорости КА) - 3;
- БДУС (блок датчиков угловых скоростей) - 4;
- УКО (устройство коррекции ошибки) - 5;
- Корпус КА - 6;
- МикроЭВМ (выполнена в виде мажоритированной трехканальной структуры) - 7;
- СД (солнечный датчик) - 8;
- ДО (датчики ориентации, выполненные в виде ПОЗ (прибора ориентации по Земле) или ТМ (трехмерного магнитометра)) - 9;
- Устройство управления ориентацией СБ (солнечных батарей) - 10;
- СБ (солнечные батареи) -11;
- ЭМСУ (электромагнитная система управления) - 12;
- ИИМ (информационный интерфейсный модуль) - 13;
- БИБ (бесплатформенный инерциальный блок) - 14;
- ПСН (приемник спутниковой навигации GPS или ГЛОНАСС) - 15;
- ИО (исполнительные органы, выполненные в виде блока двигателей-маховиков или блока гиродинов) - 16;
- СКВУ (синхронизирующее координатно-временное устройство) - 17;
- АБ (аккумуляторная батарея) - 18.
В микроЭВМ 7 с Центральной ЭВМ 1 поступают командно-программная информация (КПИ), навигационные данные (НД) через информационный интерфейсный модуль ИИМ 13.
Телеметрическая информация передаются из центральной ЭВМ 1 в наземный комплекс управления по каналу телеметрии (ТМ), а из наземного комплекса управления в центральную ЭВМ - команды управления (КУ).
Описание примера исполнения
Системы координат, которые будут использоваться при описании работы устройства:
• связанная система координат КА OXsYsZs (базис S), у которой начало координат совпадает с центром масс КА, все оси расположены вдоль строительных осей КА и определяются следующие углы:
 крен - вращение вокруг оси OXs;
крен - вращение вокруг оси OXs;
рыскание - вращение вокруг оси OYs;
тангаж - вращение вокруг оси OZs;
• орбитальная система координат OXOYOZO (базис O), у которой начало системы координат О совмещено с центром масс КА, ось OYO расположена на продолжении радиус-вектора орбиты, ось OXO перпендикулярна оси OYO, находится в плоскости орбиты и направлена в сторону вектора скорости КА, а ось OZO перпендикулярна плоскости орбиты (опорная система координат). Вектор скорости вращения опорной системы координат направлен по оси OZO.
• приборная система координат OXпYпZп - базис П (интегрирование кинематических уравнений позволяет обеспечить ее построение);
• инерциальная система координат OXиYиZи, имеющая начало О в центре Земли, ось ОХи направлена в точку весеннего равноденствия, ось OZи направлена по мгновенной оси вращения Земли в сторону Северного полюса мира, ось OYи дополняет систему OXиYиZи до правой (вторая экваториальная система координат).
При отделении КА от ракеты или разгонного блока осуществляется процесс успокоения, затем процесс приведения (совмещение осей связанной системы координат КА OXsYsZs (базисом S) с осями орбитальной системы координат OXOYOZO (базиса О) и последующая стабилизация КА.
Успокоение и последующая стабилизация КА осуществляется управляющим механическим моментом, создаваемым в результате взаимодействия генерируемых электромагнитной системой управления ЭСМУ 12 магнитных моментов с вектором магнитной индукции магнитного поля Земли в соответствии с формулой (1).

где L - вектор магнитного момента, создаваемого электромагнитными устройствами ЭСМУ;
В - вектор магнитной индукции магнитного поля Земли.
При этом используется мировая модель нормального поля, основанная на представлении нормального поля в виде ряда по сферическим функциям, коэффициенты которого определяются каждые 5 лет на основе мировой сети магнитных обсерваторий и описывается выражениями:
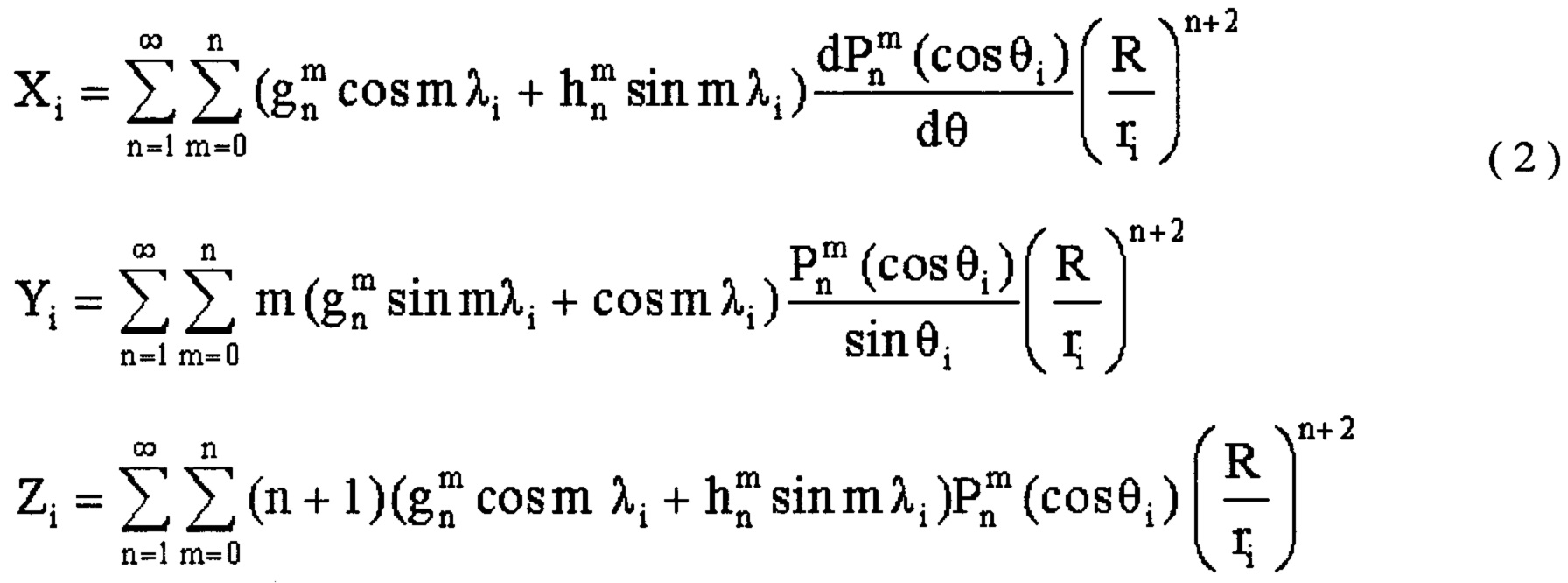
где X, Y, Z - соответственно северная, восточная и вертикальная составляющие;
R - средний радиус Земли, r - расстояние от точки до центра Земли;
λ - долгота, θ=π/2-ϕ - дополнение до широты;
Pnm(cosθi) - присоединенная функция Лежандра первого рода;
gnm, hnm - сферические гармонические коэффициенты.
С целью повышения надежности и живучести электромагнитной системы управления ЭСМУ 12 (см. например, патент, РФ, №2625687) устройство формирования механического момента электромагнитом в ней выполняют по схеме резервирования (см. например, патент, РФ, №2672316). В качестве магнитных исполнительных органов можно использовать, например, надежные электромагниты стержневого типа (сердечник из магнитно-мягкого материала с обмотками из медного провода).
В дальнейшем, в течение всего срока эксплуатации КА, с помощью данной высоконадежной ЭСМУ 12 осуществляют сброс избыточного кинетического момента. В случае насыщения системы ИО 16 производят их разгрузку, до получения значений модулей кинетического момента, лежащих в пределах между нижним и верхним допустимыми значениями в системе ИО 16 (описание сброса кинетического момента при использовании в качестве ИО 16 двигателей-маховиков см. например, в патентах, РФ, №2676592, №2625687). Для силовых гироскопов (гиродинов) в процессе построения и поддержания режима инерциальной ориентации КА в течение заданного промежутка времени измеряют текущее значение вектора накопленного кинетического момента  в системе ИО 16 и вектора абсолютной угловой скорости
в системе ИО 16 и вектора абсолютной угловой скорости  КА, при этом, для каждого ИО 16 определяют «n»-е контрольные значения суммарного вектора кинетического момента
КА, при этом, для каждого ИО 16 определяют «n»-е контрольные значения суммарного вектора кинетического момента  , характеризующие предстоящий сеанс ИО 16 по прогнозируемым значениям указанного вектора, приведенным к нулевым начальным условиям. Проверяют выполнения для каждого «n»-го значения условия управления КА:
, характеризующие предстоящий сеанс ИО 16 по прогнозируемым значениям указанного вектора, приведенным к нулевым начальным условиям. Проверяют выполнения для каждого «n»-го значения условия управления КА:

где  - определенное по измеренным векторам
- определенное по измеренным векторам  и
и  значение вектора
значение вектора  на момент времени начала проверки (поддержания ИО 16);
на момент времени начала проверки (поддержания ИО 16);
S - область располагаемых значений вектора кинетического момента системы силовых гироскопов.
Процессы успокоения и последующей стабилизация КА описаны в прототипе. По окончании процесса успокоения и стабилизации КА, в автоматическом режиме по сигналам солнечного датчика СД 8 и центральной ЭВМ 1, поступающими в устройство управления ориентацией солнечных батарей 10 (для солнечных батарей, панели которых не жестко закреплены на корпусе КА, см. например, КА "Кондор-Э", головной исполнитель АО "ВПК "НПО Машиностроения", г. Реутов), под действием приводных двигателей, находящихся в нем, солнечные батареи СБ 11 устанавливают в положение относительно корпуса КА 6 для получения максимально возможного в текущей точке орбиты КА значения тока, вырабатываемого СБ 11 (приближение к выполнению условия cosα=1=const, где α - угол между перпендикуляром к поверхности СБ 11 и направлением на Солнце). В качестве СБ 11 на КА сегодня практически во всех новых проектах применяются трехкаскадные фотоэлектрические преобразователи на основе арсенида галлия (см. Электронный журнал «Труды МАИ». Выпуск №60), имеющие срок активного существования более 10 лет.
Солнечные батареи СБ 11, у которых их панели жестко закреплены на корпусе КА (см. например, КА "Канопус-В", головной исполнитель АО "Корпорация "ВНИИЭМ", г. Москва), ориентируют на Солнце путем поворотов корпуса КА 6, в том числе и закрутки его вокруг направления на Солнце (режим «пассивной» закрутки с ориентацией СБ 11 на Солнце, т.е. режим солнечной ориентации). При этом каждый раз на время проведения целевой работы (проведения съемки) производят разворот корпуса КА 6 из режима солнечной ориентации в орбитальную ориентацию (например, продольная ось КА ДЗЗ, совпадающая с продольной осью оптико-электронного модуля, направлена в надир при проведении съемки подспутниковой точки) и поддержание данной ориентации (режим активной ориентации), а затем по окончании целевой работы производят разворот корпуса КА 6 снова в режим «пассивной» закрутки с ориентацией СБ 11 на Солнце.
Достоинством КА с жестко закрепленными на корпусе КА панелями солнечных батарей является то, что отсутствует относительное движение СБ 11, создающее дополнительные вибрации на корпусе КА 6, которые передаются целевой аппаратуре.
В частности, при использовании оптико-электронного модуля, на борту КА ДЗЗ указанные вибрации приводят к размытости снимков земной поверхности.
Однако, при этом следует учитывать, что при проведении съемки ориентация СБ 11 на Солнце не обеспечивается или обеспечивается частично, поэтому запас электроэнергии аккумуляторной батареи АБ 18 должен быть достаточным для проведения целевой работы.
Солнечный датчик 8 обеспечивает надежность и живучесть КА, т.к. при эксплуатации его в автономном режиме из-за отсутствия информационных показаний положения КА с звездных датчиков БЗД 2 может возникнуть длительное произвольное ориентирование положения КА, не позволяющее получать солнечными батареями освещенности от Солнца, приводящей к нарушению положительного энергобаланса.
В дальнейшем на протяжении всего срока активного существования КА радикальной защитой от аварийной ситуации на КА, связанной с потерей ориентации на Солнце, используют автоматический переход с основного на резервный режим управления ориентацией КА относительно направления на Солнце. Такой режим работы не может обеспечить в полной мере функциональные возможности КА, но он гарантирует положительный энергобаланс, что обеспечивает живучесть КА. Переход на резервный режим управления ориентацией проводят по команде управления (КУ) из наземного комплекса управления по «жесткой» логике, т.е. без использования центральной ЭВМ 1, при воздействиях на КА различных факторов космического пространства, например, локальных статических разрядов, приводящих к сбою в работе центральной ЭВМ 1. Последующее возобновление ориентации КА с использованием Центральной ЭВМ 1 осуществляют по КУ из наземного комплекса управления.
Для навигации используют прибор спутниковой навигации ПСН 15 GPS или ГЛОНАСС (описано в прототипе).
Достижение высокой надежности и точности ориентации КА на сегодня связывается с бесплатформенными инерциальными блоками БИБ 14, которые формируют на борту базовые системы отсчета с использованием надежных микроЭВМ 7, обладающими нужным объемом памяти с достаточным быстродействием и обеспечивающими непрерывное интегрирование уравнений движения КА при сколь угодно сложном характере его движения, позволяющие обеспечить потенциальное повышение надежности за счет резервирования, «заменяющими» громоздкие следящие привода гиростабилизированных платформ, имеющих общий недостаток - они установлены в кардановых подвесах. При этом используются, по сути, одни и те же датчики первичной информации.
Для повышения надежности и живучести микроЭВМ 7, ее выполняют в виде мажоритированной трехканальной структуры (см. Н.К. Байда и др. Эволюция отказоустойчивых БЦВК и направления их развития на однокристальных микроЭВМ. Системи обробки  , випуск 4(14), 2001). Так, например, в качестве микроЭВМ 7 возможно применение 4-х канальной ЦВМ201 (разработка АО «НИИ «Субмикрон», г. Зеленоград), при этом, рекомендуемым вариантом является мажоритированная работа 3-х модулей, а четвертый находится в холодном резерве.
, випуск 4(14), 2001). Так, например, в качестве микроЭВМ 7 возможно применение 4-х канальной ЦВМ201 (разработка АО «НИИ «Субмикрон», г. Зеленоград), при этом, рекомендуемым вариантом является мажоритированная работа 3-х модулей, а четвертый находится в холодном резерве.
БИБ 14 строится на базе высокочувствительных датчиков угловой скорости БДУС 4, измеряющих непосредственно вектор угловой скорости, и обладающих необходимым ресурсом. С целью повышения надежности и живучести БДУС 4 при минимальных аппаратных затратах целесообразно использование функциональной избыточности (четыре, шесть и более) на основе использования неортогонального расположения датчиков угловых скоростей. При этом, за счет выбора рациональной конфигурации датчиков угловых скоростей, точность БДУС 4 может быть повышена на 30-40% (см. Паршин А.П., Немшилов Ю.А. Разработка измерительного блока системы ориентации БПЛА с неортогональным расположением чувствительных элементов // Современная техника и технологии. 2016. №3). В качестве датчиков угловых скоростей БДУС 4 можно использовать, например, приборы на основе волоконно-оптических гироскопов БИУС-14, разработки ЗАО НПП «Антарес».
В исходном, "основном" режиме работы БИБ 14 используют гироскопический измеритель вектора угловой скорости ГИВУС 3, содержащий в своем составе датчики углового положения в виде датчиков ориентиров первого типа ДО 9, например, прибор ориентации по Земле (ПОЗ) или трехмерный магнитометр (ТМ), в качестве которого можно использовать, например, магнитометр цифровой трехкомпонентный МЦТ-11 разработки АО «Раменское приборостроительное конструкторское бюро».
При этом БЗД 2 для работы не включают, прежде всего, в целях экономии вырабатываемого ресурса, а также в виду того, что для получения информационных показаний положения КА с БЗД 2 требуется определенное время.
Описание работы бесплатформенного орбитального гирокомпаса с ДО 9 приведено, например, в патентах:
• с ПОЗ, патенты, РФ, №2579387, №2597018;
• с ТМ, патент, РФ, №2408508.
Использование в качестве ПОЗ (ДО 9) приборов (см. патенты, РФ, №2131587, №2020412), в которых фиксируются отклонения от вертикальной плоскости Земли (ПОЗ) и Солнца (ПОС), позволяет достигать высокую надежность в получении максимальной освещенности СБ 11, определяемой направлением на Солнце, за счет горячего резервирования работы солнечного датчика СД 8.
При отказе гирокомпасирования с ПОЗ осуществляют переход на измерение параметров орбиты КА (трехосной ориентации КА) с использованием в качестве ДО 9 трехмерного магнитометра ТМ для определения вектора напряженности магнитного поля Земли. При этом, в качестве ТМ целесообразно использование обязательно присутствующего его в ЭСМУ 13, что положительно отражается на массогабаритных характеристиках и надежности КА.
Звездные датчики являются наиболее точными и относятся к средствам космической техники критического назначения, поэтому БЗД 2 включают кратковременно для калибровки БДУС 4, коррекции ошибок, вызванных погрешностями измерения угловой скорости БДУС 4, неточностями задания вектора угловой орбитальной скорости и ошибок интегрирования кинематического уравнения микроЭВМ 7, при этом обязательно включают на участках целевой работы ДЗЗ КА, где требуется высокая точность ориентации.
Начало проведения целевой работы ДЗЗ КА осуществляют только при условии:

где
Сост - текущее значение остаточной емкости аккумуляторной батареи АБ 18 на момент начала проведения целевой работы ДЗЗ КА;
С ост.мин - минимальное значение остаточной емкости аккумуляторной батареи АБ 18, достаточное для проведения целевой работы ДЗЗ КА и прохождения теневого участка на данном витке орбиты (при расчете С ост.мин допускается учитывать отключение определенного количества потребителей КА, см. например, патент, РФ, №2168828).
Под остаточной емкостью АБ следует понимать значение количества электрической энергии, выраженное в ампер часах или Кулонах, которое АБ отдает при разряде до выбранного конечного напряжения в любом текущем его состоянии.
Для повышения надежности проведении целевой работы выбирают наихудший вариант, при котором приток количества электрической энергии в АБ 18 отсутствует, т.е. составляющая остаточной емкости С ост.мин выражения (4) за счет подзаряда АБ 18 от СБ 11 равна нулю. При этом, в случае возникновения аномальной ситуации при проведении целевой работы, приводящей к выходу величины Сост за пределы расчетного значения, живучесть КА обеспечивают путем прекращения целевой работы и переводом его из режима активной ориентации в режим «пассивной» закрутки с ориентацией СБ 11 на Солнце.
Следует отметить, что на протяжении полета КА ДЗЗ при выполнении всех запланированных полетных операций обеспечивается гарантирующий положительный энергобаланс посредством контроля уровня заряженности (остаточной емкости) АБ 18 и сравнения его с допустимыми значениями (см. Заявку на изобретение, РФ, №2018130940 от 27.08.2018). При этом в допустимые значения входит часть заряда АБ 18, направленная на управление КА для восстановления ориентации СБ 11 на Солнце в случаях ее потери.
Как было показано выше, для повышения надежности и живучести БЗД 2 целесообразно применять избыточную систему в виде трех звездных датчиков, два из которых, определенным образом расположенными относительно мешающими небесными телами - Солнца, Луны и Земли, находятся в работе, а один находится в резерве. При засветке звездного датчика БЗД 2 (например, при ослеплении Солнцем) вместо его данных может использоваться информация о положении Солнца по СД 8, которая предсказывается на любой момент времени с высокой точностью. Солнечный датчик СД 8 с низкой погрешностью можно использовать вместо или вместе с ЗД, в том числе, при нарушении функционирования БЗД 2, когда скорость вращения КА превышает несколько градусов в секунду. В качестве СД 8 можно использовать, например, солнечный датчик с точностью определения угловых координат Солнца менее 1 угловой минуты по всему полю зрения 190°×190° (см. патент, РФ, №2517979).
БЗД 2 позволяет определить матрицы перехода от системы координат БЗД 2 к системе координат звездного каталога, приведенную на текущую эпоху. Он обеспечивает определение углов наклона аппарата относительно второй экваториальной системы координат. То есть прибор звездной ориентации БЗД 2 позволяет определять параметры матрицы (кватерниона) поворота от приборной системы координат, определяемой посадочным местом БЗД 2, ко второй экваториальной системе координат (инерциальной) и позволяет получить информацию о пространственном положении съемочной камеры и об углах ее наклона для координатной привязки видеоданных дистанционного зондирования высокого разрешения.
Для описания конечного поворота КА используют математический аппарат кватернионов и параметры Родрига-Гамильтона, которые в отличие от углов Эйлера (Крылова) позволяют избавиться от операций с тригонометрическими функциями, что повышает эффективность использования микроЭВМ 7, а также из-за того, что кинематические уравнения в параметрах Родрига-Гамильтона являются линейными уравнениями, которые не вырождаются при любом угловом положении КА (см. В.Н. Бранец, И.П. Шмыглевский. Применение кватернионов в задачах ориентации твердого тела. - М.: Наука, 1973. - С. 8-11).
Пусть относительно инерциального пространства базис S вращается с угловой скоростью ω=[ωx, ωy, ωz]T, а базис О - с угловой скоростью Θ=[Θx, Θy, Θz]T (т - означает транспонирование матрицы). Кинематическое уравнение, определяющее положение базиса S относительно базиса О с использованием параметров Родрига-Гамильтона (см. Труды МФТИ - 2010. - Том 2, №3, Аэрокосмические исследования, прикладная механика, стр. 189), имеет вид:

В начальный момент процесса приведения совмещенные базис О и базис S совпадают с приборным базисом П, находящегося в исходном положении (не имеет уходов). Опорный базис О вращается с угловой орбитальной скоростью относительно исходного приборного базиса П. Интегрирование кинематического уравнения

обеспечивает построение на борту КА вращающегося приборного базиса П,
где
Λ=[λ0, λ1, λ2, λ3] - кватернион рассогласования, задающий переход от вращающегося базиса О к связанному S;
ωs=[о, ωsx, ωsy, ωsz] - кватернион угловой скорости КА;
ωos=[o, ωox, ωoy, ωoz] - кватернион угловой скорости, у которого компоненты ωox, ωoy, ωoz - проекции вектора угловой орбитальной скорости на оси связанного базиса S.
При учете погрешностей из-за ухода вращающейся приборной системы координат кинематическое уравнение примет вид (см. Вопросы электромеханики. Труды ВНИИЭМ Т. 163, №2, 2018 г., стр. 4):

где δωs - погрешности измерения угловой скорости БДУС 4;
δωos - неточности задания вектора угловой орбитальной скорости и ошибки интегрирования кинематического уравнения микроЭВМ 7.
Второе слагаемое правой части уравнения выражения (7) вызывает изменение производной кватерниона рассогласования и определяет скорость ухода БИБ 14.
В БИБ 14 микро ЭВМ 7 осуществляет интегрирование кинематических уравнений по информации об абсолютной угловой скорости КА, а устройство коррекции ошибки УКО 5 обеспечивают постоянное отслеживание погрешностей (см. патент, РФ, №2517018), которые компенсируются посредством механического воздействия исполнительными органами ИО 16 на корпус КА 6 по рысканью, крену и тангажу.
Совместная работа датчиков ориентиров первого типа ДО 9 и БДУС 4 в ГИВУС 3 позволяют обеспечить несущественные изменения производной кватерниона рассогласования в выражении (7), что упрощает процедуру вычислений в микроЭВМ 7.
В результате в режиме работы БИБ 14 с использованием ГИВУС 3 обеспечивается высокая его надежность, а также высокая надежность и живучесть БЗД 2 из-за его «ресурсосберегающего» режима работы.
При выходе из строя ДО 9 работу ГИВУС 3 осуществляют автономно без датчиков ориентации первого типа, т.е. данных углового положения КА, ориентирами которых являются Земля или напряженность вектора магнитного поля Земли. В данном случае ориентиром углового положения КА определяют звезды, а в качестве датчика является БЗД 2, который "дополняет" работу БДУС 4 и микроЭВМ 7 непрерывно производит расчет вектора угловой скорости КА.
Для повышения срока службы БЗД 2 (для получения максимально «ресурсосберегающего» режима работы), в дежурном режиме (при отсутствии целевой работы ДЗЗ) его включают по сигналу синхронизирующего координатно-временного устройства СКВУ 17 при достижении заданной предельно допустимой низкой точности ориентации КА из-за ухода приборного базиса П, соответствующей максимально допустимому изменению производной кватерниона рассогласования в выражении (7).
При выходе из строя гироскопов в БДУС 4 (например, двух и более при избыточной системе БУС 4, состоящей из 4-х) в качестве сигнала вектора угловой скорости КА (сигнала управления ИО 16) используют среднее значение вектора угловой скорости БЗД 2 (см. патент, РФ, 2519603). Среднее значение угловой скорости формируется на выходе БЗД 2 путем дифференцирования среднего значения угла, определяемого на выходе апериодического звена, входящего в состав БЗД 2.
В качестве исполнительных органов ИО 16 используют двигатели-маховики или гиродины (двухстепенные или трехстепенные силовые гироскопические комплексы), которые в отличие от широко известных реактивных двигателей, не требуют запасов рабочего тела, и срок их службы не ограничивается его расходованием.
При использовании двигателей-маховиков (см. патент, РФ, №2676592) влияние изменения угловой скорости вращения маховика на угловую скорость КА описывается законом сохранения момента количества движения для случая плоского вращательного движения относительно некоторой оси:

где Ja, Jм соответственно моменты инерции КА и маховика,
ωa, Ωм соответственно их текущие угловые скорости,
ωa(0), Ωм(0) начальные значения угловых скоростей.
В качестве двигателей-маховиков можно использовать, например, ДМ1-20, ДМ5-50, выпускаемые в АО "Корпорация "ВНИИЭМ", г. Москва.
Для управления ориентацией КА необходимо как минимум три двигателя-маховика: по каждой из осей ориентации КА (крену, рысканью, тангажу). Резервировать их в «холодном» режиме нецелесообразно в виду того, что, как показала практика, электромеханическое устройство, которое длительное время не включалось в космосе, имеет все шансы не включиться и в тот момент, когда в нем появится необходимость. Поэтому для повышения надежности используют избыточную систему, например, при минимальной избыточной системе следует расположить их на гранях пирамиды, делить управляющий момент между всеми четырьмя двигателями-маховиками и парировать отказ одного из них, перераспределяя момент по трем оставшимся.
В космических аппаратах, которые требуют большого управляющего момента, целесообразно использовать гиродины. В отличие от двигателей-маховиков они имеют более сложную конструкцию и систему управления, имеют большие размеры и массу, требуют длительной и плавной раскрутки ротора. Рациональный выбор частоты ротора (ниже максимально допустимой) позволяет увеличить срок службы гиродина.
Величины управляющих моментов по осям гиродина, например, по крену (ось OXs; по рысканью и тангажу аналогичны) описываются следующим выражением:
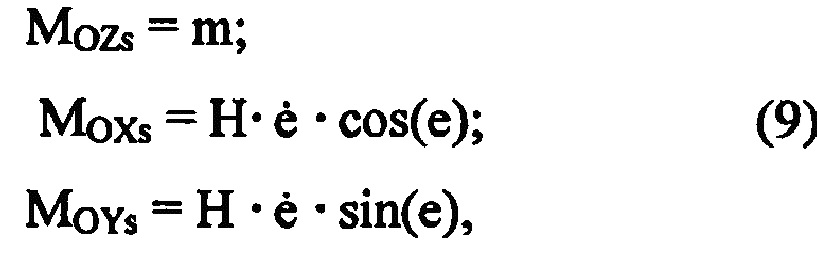
где m - величина вращающего момент вокруг оси прецессии (ось OZs),
Н - величина кинетического момента гироскопа (ось ОYs),
е - угол отклонения вектора Н от исходного номинального положения,
 - угловая скорость поворота гироузла.
- угловая скорость поворота гироузла.
(см. Петрищев В.Ф. Элементы теории гироскопа и его применение для управления космическими аппаратами: Учебное пособие. Самарский государственный аэрокосмический университет. Самара, 2004. с. 59-61).
В качестве гиродинов можно использовать, например, гиродины СГК-100, СГК-30, выпускаемые предприятием «НИИ командных приборов», Россия, Санкт-Петербург.
На практике для обеспечения высокой надежности целесообразно использовать избыточную систему гиродинов, в которой число гиродинов больше трех (см. В.Н. Васильев. Системы ориентации космических аппаратов, М., 2009, с. 184-188). При этом наибольший интерес представляют системы из четырех гиродинов, обладающих минимальной избыточностью, т.е. минимальной массой и в то же время сохраняющих работоспособность при отказе одного гиродина, повышая, тем самым, надежность КА.
Практическая реализация избыточной системы гиродинов связана с необходимостью обеспечения закона управления гиродинами, при этом, следует отметить, что при использовании компланарной и тетраэдрной конфигурации минимально избыточной системы, время переориентации для компланарной схемы вдвое меньше, чем для тетраэдрной схемы. Это объясняется тем, что для компланарной схемы алгоритмы управления гиродинами являются более простыми и одновременно более эффективными вследствие простой геометрической организации системы, допускающей наглядную интерпретацию поведения коллинеарных пар гиродинов в ходе управления (см. Л.В. Шипулина, О.А. Татаринова, Ю.Н. Корытко. Управление переориентацией космического аппарата с ограничением на ориентацию. Вiсник НТУ «ХПI». Серiя: Системний аналiз, управлiння та iнформащiйнi  . - X.: НТУ «ХПI», 2013. - №62(1035). - С. 48-52).
. - X.: НТУ «ХПI», 2013. - №62(1035). - С. 48-52).
Таким образом, высокая надежность и живучесть системы ориентации КА, позволяющая достигать выдвигаемый на сегодня высокий срок активного существования (более 10 лет) при сохранении требуемой точности ориентации на участках целевой работы КА ДЗЗ, достигается за счет:
• обеспечения гарантирующего положительного энергобаланса;
• использования в исходном, "основном" режиме работы бесплатформенного инерциального блока режима гирокомпасирования гироскопического измерителя вектора угловой скорости, содержащем в своем составе блок угловых скоростей, выполненного по избыточной схеме, и датчики углового положения в виде прибора ориентации по Земле, а на участках целевого ДЗЗ КА, где требуется высокая точность ориентации, режима гирокомпасирования совместно с блоком звездных датчиков;
• обеспечения "ресурсосберегающего" режима блока звездных датчиков, относящихся к средствам космической техники критического назначения, за счет кратковременного включения их для коррекции ошибок, вызванных погрешностями измерения угловой скорости, неточностями задания вектора угловой орбитальной скорости и ошибок интегрирования кинематического уравнения микроЭВМ;
• достаточности текущего значения остаточной емкости аккумуляторной батареи для целевой работы и прохождения КА теневого участка на данном витке орбиты;
• использования рационального математического аппарата кватернионов конечного поворота от приборной системы координат, ко второй экваториальной системе координат;
• перехода при отказе режима гирокомпасирования с ПОЗ на измерение параметров орбиты КА (трехосной ориентации КА) с использованием в качестве датчика положения трехмерного магнитометра ТМ для определения вектора напряженности магнитного поля Земли;
• автономной работы без данных углового положения КА, ориентирами которых являются Земля или напряженность вектора магнитного поля Земли (при выходе из строя составляющих режима гирокомпасирования с ПОЗ и с ТМ);
• использования среднего значения вектора угловой скорости на выходах блока звездных датчиков при выходе из строя датчиков угловых скоростей в блоке (например, двух и более при избыточной системе, состоящей из 4-х);
• совокупного обеспечения высокой надежности составляющих системы ориентации КА посредством использования рациональной избыточности исполнительных органов, резервирования в магнитной системе, мажоритирования структуры микроЭВМ.
Способ управления космическим аппаратом дистанционного зондирования Земли, заключающийся в автоматической установке на орбите по солнечному датчику солнечных батарей, не жестко закрепленных с корпусом космического аппарата, в фиксированное положение относительно корпуса космического аппарата с помощью устройства управления ориентацией солнечных батарей для получения максимальной их освещенности, гарантирующих положительный энергобаланс при каких-либо сбоях в работе системы ориентации, в том числе сбоях в работе центральной ЭВМ, управлении с наземного комплекса управления устройством управления ориентацией солнечных батарей по жесткой логике при сбоях, ориентации космического аппарата на заданной орбите с помощью блока датчиков угловой скорости, микроЭВМ, датчика ориентации в виде прибора ориентации по Земле или трехмерного магнитометра, входящих в бесплатформенный инерциальный блок, ошибки которого, вызванные погрешностями блока датчиков угловой скорости, ошибками интегрирования кинематического уравнения микроЭВМ и неточностями задания вектора угловой орбитальной скорости, компенсируют путем сравнения в устройствах коррекции ошибки с показаниями блока звездных датчиков, выполненного по избыточной схеме с резервированием, управлении по сигналам микроЭВМ исполнительными органами для создания ими необходимого крутящего момента, воздействующего на корпус космического аппарата для его управления и сброса кинетического момента, отличающийся тем, что для солнечных батарей, панели которых жестко закреплены на корпусе космического аппарата, используют поворот корпуса космического аппарата в режиме «пассивной» закрутки для ориентации солнечных батарей на Солнце и каждый раз на время проведения целевой работы производят разворот корпуса космического аппарата из режима солнечной ориентации в орбитальную ориентацию в режим активной ориентации, затем по окончании целевой работы производят разворот корпуса космического аппарата в режим «пассивной» закрутки с ориентацией солнечных батарей на Солнце, при этом проведение целевой работы осуществляют только при условии достижения текущего значения остаточной емкости аккумуляторной батареи, достаточного для целевой работы и прохождения космическим аппаратом теневого участка, а в случае возникновения аномальной ситуации по достаточности остаточной емкости аккумуляторной батареи целевую работу прекращают и ориентируют солнечные батареи на Солнце, кроме того, для описания конечного поворота космического аппарата от приборной системы координат, определяемой посадочным местом блока звездных датчиков, ко второй экваториальной системе координат (инерциальной) используют математический аппарат кватернионов и параметры Родрига-Гамильтона, которые не вырождаются при любом угловом положении космического аппарата; при нарушении в работе или выходе из строя датчика ориентации ориентир углового положения космического аппарата определяют по звездам и блок звездных датчиков в дежурном "ресурсосберегающем" режиме включают при достижении заданной предельно допустимой низкой точности ориентации космического аппарата из-за ухода приборного базиса; при выходе из строя блока датчиков угловой скорости в качестве сигнала вектора угловой скорости космического аппарата используют среднее значение угловой скорости блока звездных датчиков; высокую надежность составляющих системы ориентации обеспечивают за счет того, что микроЭВМ выполняют в виде мажоритированной трехканальной структуры, исполнительные органы, блок датчиков угловой скорости выполняют по избыточной системе, а устройство формирования механического момента в электромагнитной системе управления выполняют по схеме резервирования.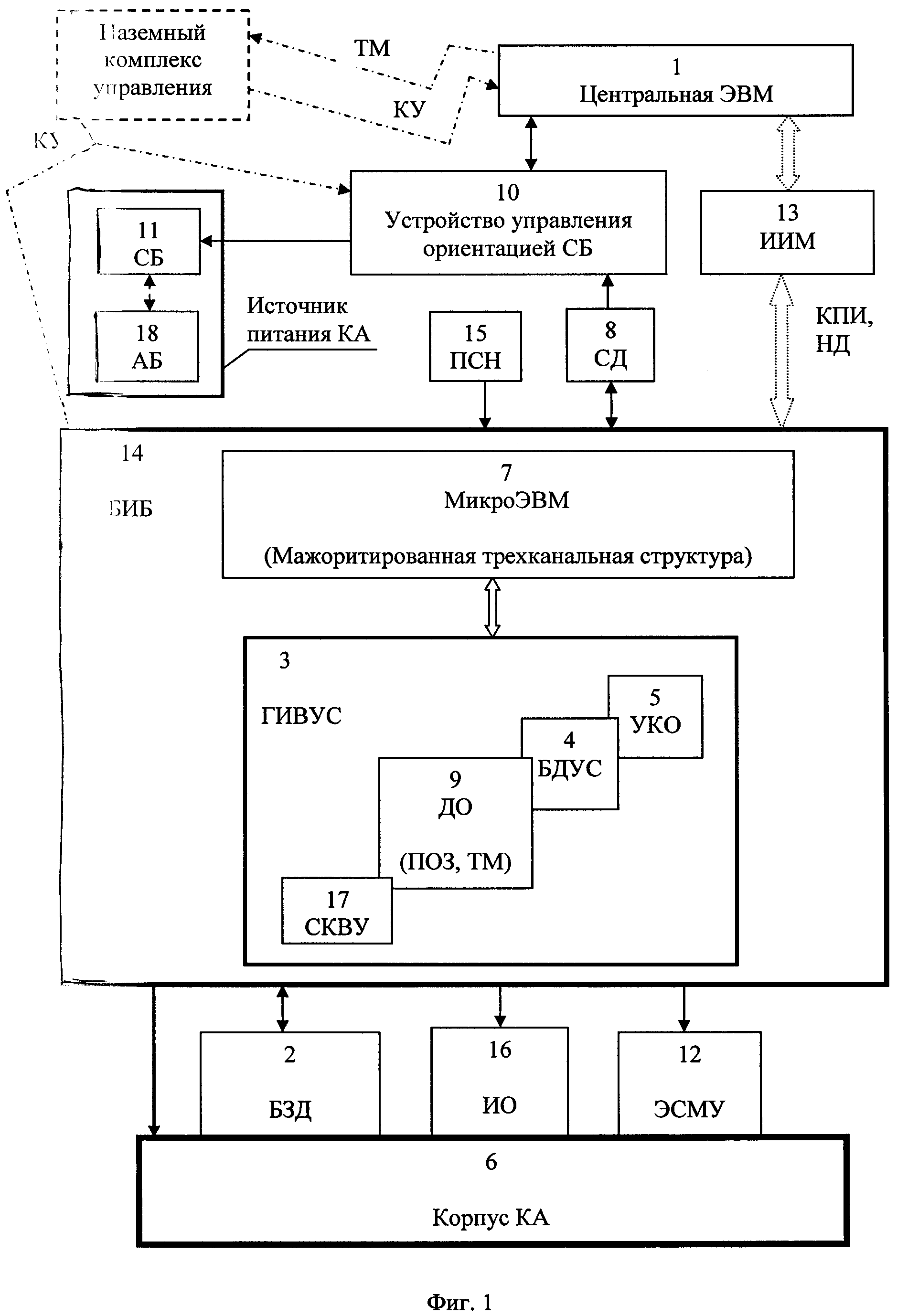
Электрореактивная двигательная установка
Способ создания микрополосковых антенн метрового диапазона и устройство, реализующее этот способ
Устройство детоксикации лимфы
Способ ориентации космического аппарата и устройство для реализации способа
Способ сброса кинетического момента инерционных исполнительных органов космического аппарата и устройство для реализации способа
Устройство управления движением космического аппарата для очистки космоса от мусора
Способ эксплуатации литий-ионной аккумуляторной батареи в составе космического аппарата негерметичного исполнения с радиационным охлаждением
Способ изготовления гибких нагревостойких электронагревателей
Способ ориентации космического аппарата
Способ управления ориентацией космического аппарата
Стабилизированный комбинированный источник электропитания
Способ автоматической компенсации ошибок бесплатформенной системы ориентации в системе управления ориентацией космических аппаратов, и устройство, реализующее этот способ
Устройство для очистки биологических жидкостей
Аппарат сочетанной детоксикации крови и лимфы
Устройство управления нагревателями аппаратуры космического аппарата
Электропривод постоянного тока
Устройство детоксикации лимфы
Устройство экстракорпоральной детоксикации лимфы
Аппарат экстракорпоральной сочетанной детоксикации крови и лимфы
Способ ориентации космического аппарата и устройство для реализации способа

