Результат интеллектуальной деятельности: Установка для исследования рулевых винтов вертолета на режиме неуправляемого вращения
Вид РИД
Изобретение
Изобретение относится к области авиации и касается исследования рулевых винтов вертолета на режиме неуправляемого вращения.
В настоящее время существует большое количество установок для исследования винтов вертолета и в частности рулевых винтов: Антропов B.Ф. Экспериментальные исследования по аэродинамике вертолета / В.Ф. Антропов, Г.Б. Бураков, А.С. Дьяченко; ред. А.К. Мартынов - 2-е изд. перераб. и доп. - М.: Машиностроение, 1980. - 240 с; patent US №5251847 «tail rotor anti-torque system for a helicopter», МПК B64C 27/82, 1993; Acree, C.W., Sheikman, A., "Development and Initial Testing of the Tiltrotor Test Rig," Presented at the AHS International 74th Annual Forum & Technology Display, Phoenix, Arizona, May 14-17, 2018.
Такие установки предназначены для исследования изолированного рулевого винта; комбинации рулевого винта и несущего; комбинации рулевого винта и фюзеляжа, оперения. Исследования на таких установках проводятся в аэродинамических трубах, при различных числах Маха и Рейнольдса. Установки имеют различные масштабы к натурным рулевым винтам и соответственно различные числа подобия. Установки позволяют проводить исследования на различных режимах: горизонтальный полет, набор и снижение, осевые режимы полета, включая режим «вихревого кольца».
Наиболее близким прототипом является установка ВП-5 (Антропов В.Ф. Экспериментальные исследования по аэродинамике вертолета, с. 68, 1980 г.), содержащая силовую раму с расположенными на ней моделью вертолета с двигателем несущего и рулевого винтов. Установка имеет возможность проводить в аэродинамических трубах экспериментальные исследования рулевого винта совместно с несущим и планером вертолета. Недостаток установки заключается в отсутствии возможности вращать саму модель вертолета вокруг вертикальной оси при номинальных оборотах несущего и рулевого винта.
Задачей и техническим результатом изобретения является разработка эффективной установки для исследования рулевых винтов вертолета, позволяющей моделировать режим неуправляемого вращения вертолета.
Решение задачи и технический результат достигаются тем, что в установке для исследования рулевых винтов вертолета на режиме неуправляемого вращения, содержащей силовую раму с расположенными на ней моделью вертолета с двигателем несущего и рулевого винтов, на силовой раме установлен с возможностью вращения вертикальный вал, на торце которого закреплена платформа для установки на ней модели вертолета, при этом вертикальная ось модели вертолета и ось вертикального вала совпадают и проходят через центр втулки несущего винта модели вертолета. Для вращения платформы, несущего и рулевого винтов использованы автономные двигатели.
Технический результат достигается также тем, что вращение платформы вокруг вертикальной оси осуществлено с помощью электродвигателя, горизонтального вала, цилиндрического редуктора, вертикального вала и углового редуктора.
Технический результат достигается также тем, что управление оборотами электродвигателя осуществлено с помощью частотного преобразователя.
Технический результат достигается также тем, что для вращения несущего и рулевого винтов использованы вентильные электродвигатели, питание которых осуществлено от аккумуляторных батарей.
Технический результат достигается также тем, что управление электродвигателями несущего и рулевого винтов осуществлено с помощью транзисторных коммутаторов.
Технический результат достигается также тем, что для измерения тяги и крутящего момента рулевого винта на статоре электродвигателя рулевого винта закреплены тензометрические весы.
Технический результат достигается также тем, что передача управляющих сигналов на установку и сбор информации с нее осуществлены по беспроводному каналу связи.
На фиг. 1-6 представлены:
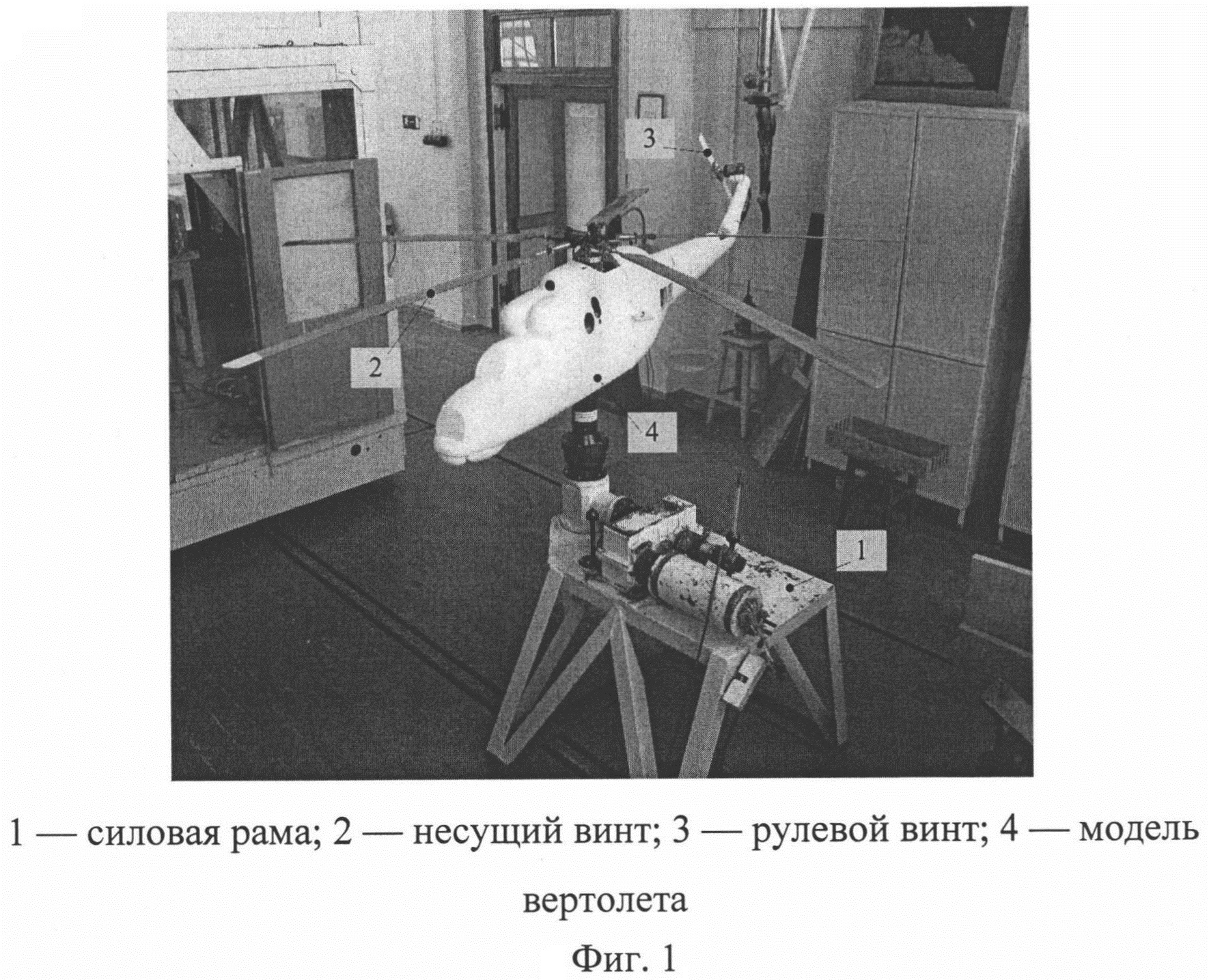
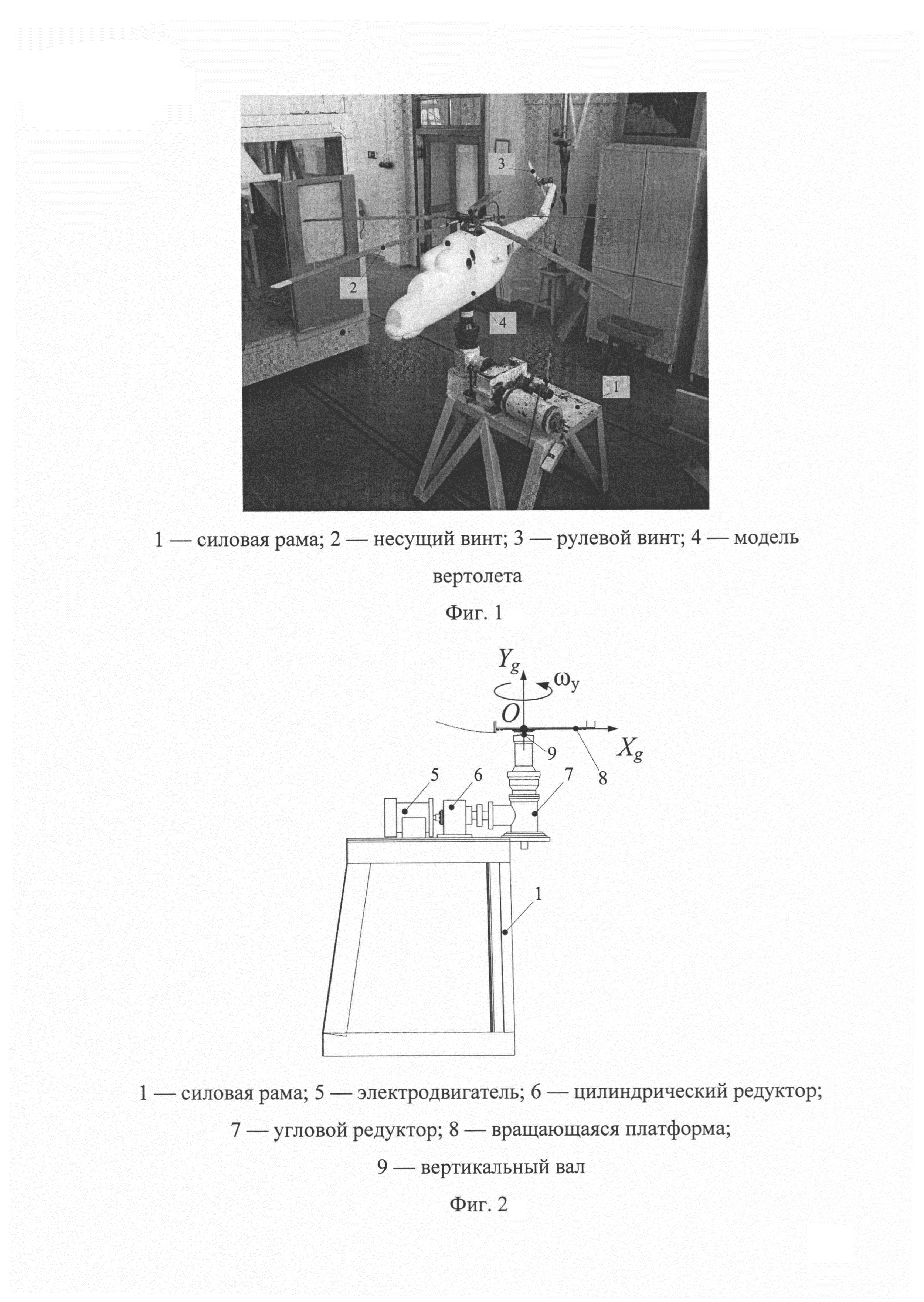
На фиг. 1 - общий вид установки; на фиг. 2 - силовая рама с вращающейся платформой и вертикальным валом; на фиг. 3 - привод несущего винта вертолета; на фиг. 4 - общий вид рулевого винта; на фиг. 5 - тензометрические весы; на фиг. 6 - система управления и сбора информации.
Установка состоит (фиг. 1) из следующих основных элементов: силовой рамы 1 с вращающейся платформой, модели вертолета 4, несущего 2 и рулевого 3 винтов, системы управления и сбора информации.
Силовая рама 1 с вращающейся платформой состоит (фиг. 2) из вертикального вала 9, электродвигателя 5, цилиндрического 6 и углового 7 редукторов.
Цилиндрический редуктор 6 двухступенчатый с передаточным отношением 1:12,5 служит для понижения оборотов электродвигателя 5. Угловой редуктор 7 служит для передачи вращения с горизонтального вала на вертикальный 9 с передаточным отношением 1:1. К торцу вертикального вала крепится вращающаяся платформа 8 с корпусом вертолета. Вращающаяся платформа приводится во вращение с помощью электродвигателя 5. Угловая скорость вращения этой части платформы может регулироваться в пределах от 0,5 до 6 рад/с. Управление двигателем вращающейся платформы осуществляется с помощью частотного преобразователя.
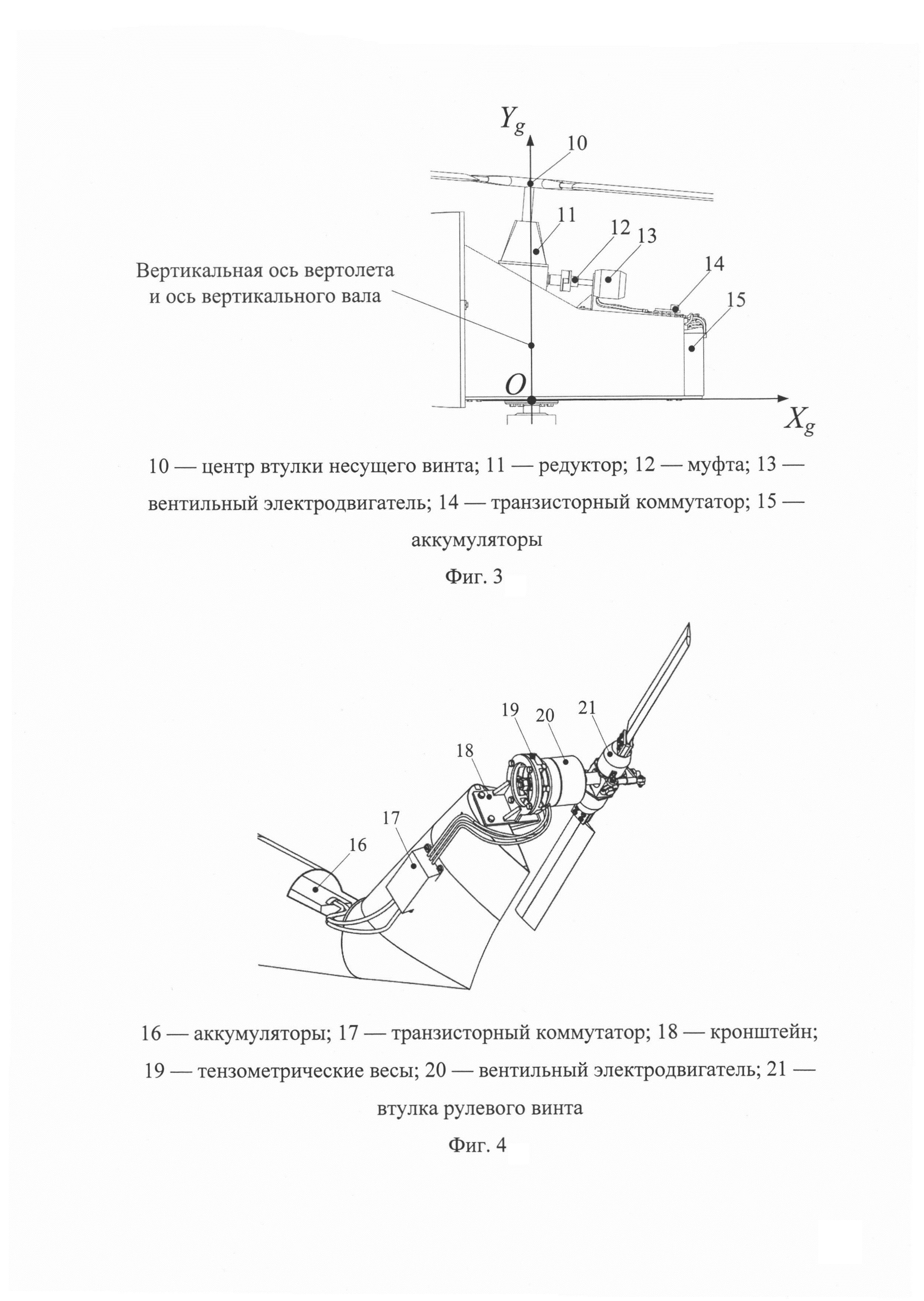
Вертикальная ось вертолета и ось вертикального вала совпадают и проходят через центр втулки 10 несущего винта (фиг. 3), обеспечивая моделирование вращения вертолета вокруг вертикальной оси OYg с угловой скоростью вращения ωy. (фиг. 2).
Главным отличием режима неуправляемого вращения является вращение вертолета вокруг вертикальной оси. На этом режиме тяги рулевого винта не хватает для уменьшения вращения вертолета. Поэтому вертолет, вошедший по каким-либо причинам во вращение вокруг вертикальной оси, не способен остановить это вращение.
Несущий винт (фиг. 3) приводится во вращение с помощью вентильного электродвигателя 13 через муфту 12 и редуктор 11. Электродвигатель питается от аккумуляторных батарей 15 и приводится во вращение с помощью транзисторного коммутатора 14. Частота вращения несущего винта может регулироваться в пределах от 200 до 600 об/мин.
Вращение рулевого винта (фиг. 4) осуществляется с помощью отдельного вентильного электродвигателя 20, который питается от аккумуляторных батарей 16 и приводится во вращение с помощью транзисторного коммутатора 17. Частота вращения рулевого винта может регулироваться в пределах от 1000 до 3000 об/мин.
Вращение с ротора электродвигателя передается напрямую без редуктора на вал и втулку 21 рулевого винта. Статор электродвигателя крепится к тензометрическим весам 19, установленным на кронштейне 18.
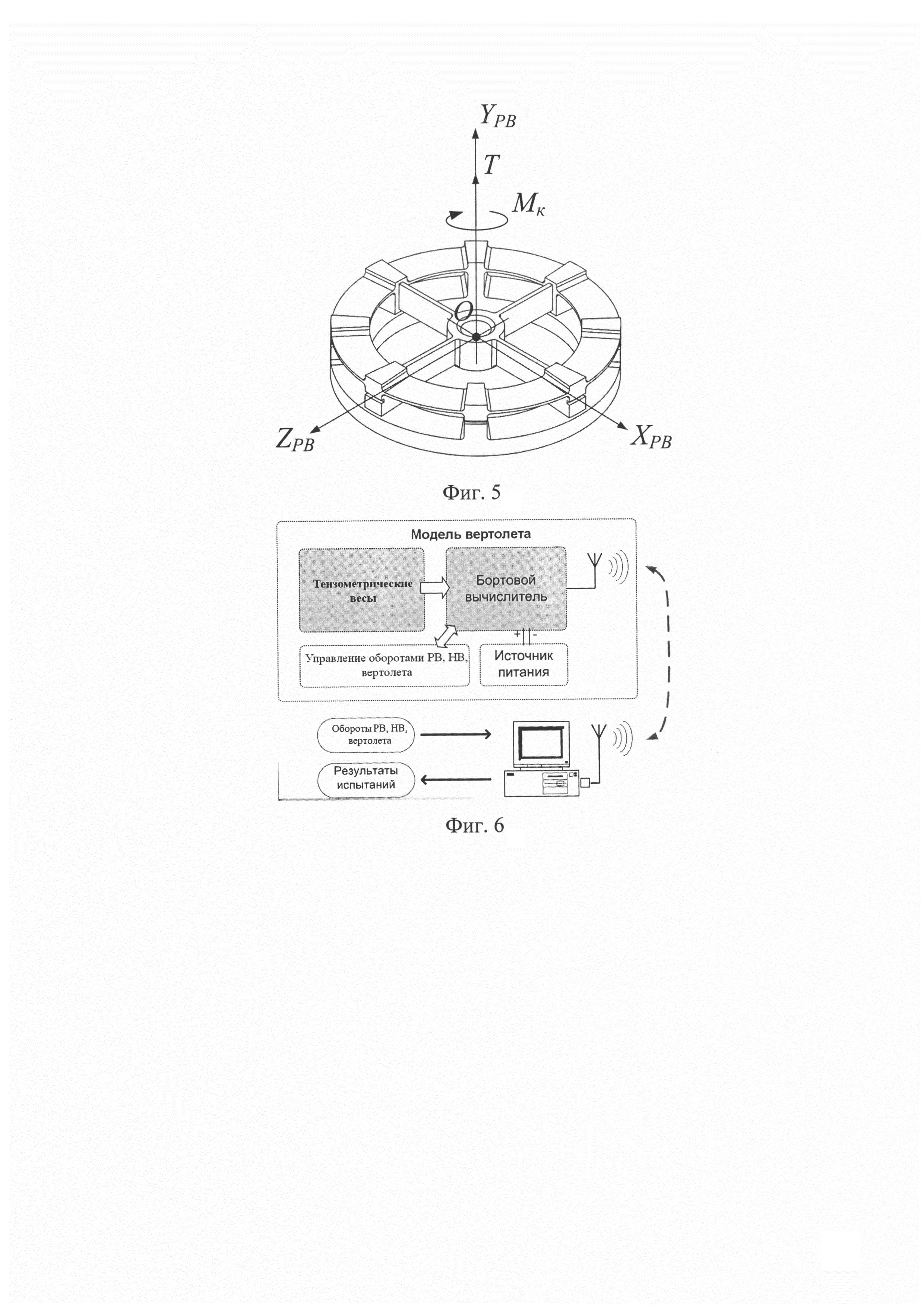
Тензометрические весы (фиг. 5) служат для измерения во время эксперимента тяги Т и крутящего момента рулевого винта Мк. Ось OY тензовесов проходит через ось вала рулевого винта (РВ). Диапазон допустимых значений тяги Т рулевого винта для весов: от минус 5 до плюс 5 кгс, диапазон допустимых значений крутящего момента Мк: от минус 0,33 до плюс 0,33 кгс⋅м.
Для управления двигателями несущего и рулевого винтов применяется система беспроводного управления и сбора информации (фиг. 6). Данная система состоит из программы Srv_XADI_ADIS_15, установленной на персональный компьютер (ПК) оператора, бортового вычислителя, установленного внутри корпуса модели вертолета и аккумуляторных батарей. Оператор со своего рабочего места, расположенного на расстоянии в безопасном боксе, вводит необходимые обороты двигателей несущего и рулевого винтов. Далее сигнал с ПК через беспроводную сеть передается на многофункциональный блок, который преобразует его в управляющий сигнал для транзисторных коммутаторов.
В процессе эксперимента, значения угловой скорости вращения вертолета ωу и показания тензометрических весов поступают в многофункциональный блок. Далее эти величины оцифровываются и передаются по беспроводной сети на ПК оператора и записываются в файл программой Srv_XADI_ADIS_15.
Таким образом, технический результат, заключающийся в обеспечении возможности моделировать на установке режим неуправляемого вращения вертолета, достигается тем, что модель вертолета с вращающимися несущим и рулевым винтами приводится во вращение вокруг вертикальной оси, проходящей через центр втулки несущего винта.
Способ газолазерной резки крупногабаритных деталей из композиционных материалов и устройство для его осуществления
Полимерная композиция
Грунтовочная композиция
Способ адаптации рабочей части аэродинамической трубы для получения безындукционного обтекания моделей летательных аппаратов и устройство для его осуществления
Способ получения конъюгата нона-β-(1→3)-глюкозида с бычьим сывороточным альбумином скваратным методом
Износостойкий сплав на основе никеля для нанесения износо- и коррозионно-стойких покрытий на конструкционные элементы микроплазменным или сверхзвуковым газодинамическим напылением
Способ измерения температуры поверхности конструкции резистивным чувствительным элементом, устройство для его осуществления и способ изготовления устройства
Способ определения температурной характеристики резисторного чувствительного элемента, устройство для его осуществления и способ изготовления устройства
Устройство для измерения звукового давления
Устройство для измерения давления, температуры и теплового потока
Способ управления движением судна с компенсацией медленно меняющихся возмущений
Скоростной винтокрыл
Способ отказоустойчивого управления движением корабля по глубине
Способ получения гетероаннулярных 1,1'-бис-(диметилалкоксисилил)ферроценов
Аэродинамическая труба
Система идентификации гидродинамических коэффициентов математической модели движения судна
Система отказоустойчивого управления движением корабля
Система определения гидродинамических коэффициентов математической модели движения судна
Аэродинамический профиль поперечного сечения несущей поверхности (варианты)
Преобразуемый летательный аппарат вертикального взлета и посадки (варианты)

