Результат интеллектуальной деятельности: Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации
Вид РИД
Изобретение
Изобретение относится к области навигации подвижных технических систем и может быть использовано в автономных системах навигации беспилотных летательных аппаратов (БПЛА) малой дальности, в которых требуется определение с высокой точностью абсолютных координат местоположения в условиях полного (частичного) отсутствия сигналов от спутниковых навигационных систем.
Пилотажно-навигационная система БПЛА рассматривается как комплексная навигационная система (КНС), имеющая в своем составе бесплатформенную инерциальную навигационную систему (БИНС), работающую непрерывно при измерении текущего ускорения (акселерометры), горизонтального и вертикального углов (гироскопы), и приемник потребителя спутникового сигнала от группировки глобальной навигационной системы ГЛОНАСС, периодически корректирующего текущую навигационную информацию от БИНС
Спутниковые навигационные системы (GPS, ГЛОНАСС, GALILEO, BEIDOU) обеспечивают необходимую точность определения местоположения на поверхности Земли, ввиду влияния различных факторов они также имеют недостатки:
- возникновение ошибки, вызываемой «многолучевостью», которая обусловлена многократными переотражениями сигнала со спутника от окружающих предметов и поверхностей до того, как он попадает в приемник.
- помехи от близко расположенных мощных источников радиоизлучений: локаторов, теле- и радиопередающих станций и т.п.
- плохое качество или полное отсутствие спутникового сигнала, вызванное неудачным геометрическим взаимным расположением БПЛА и навигационных спутников.
- блокировка, связанная с применением специальных комплексов радиоэлектронной борьбы или умышленная подмена навигационного поля (GPS-спуфинг).
В качестве дополнительных измерителей для коррекции БИНС на борту БПЛА могут использоваться измерители, основанные на различных физических принципах определения параметров движения.
Известна навигационная система (НС) основанная на визуальной навигации БПЛА. Существуют три основных подхода для решения задачи определения параметров движения объекта:
1. Определение параметров движения и ориентации путем отслеживания перемещения в кадре изображений характерных (особых) точек местности, при заблаговременно подготовленной информации. После идентификации точек на каждом снимке точное определение параметров движения позволяет определить текущее местоположение подвижной технической системы. Наиболее сложной проблемой остается детектирование особых точек и их соотнесение с набором характерных признаков.
2. Подход «ego motion» позволяет оценивать относительное движение камеры по отношению к предыдущему ее положению. Источником данных являются видеокадры. Оценив параметры движения и начальные условия, можно путем интегрирования вычислить траекторию движения камеры. Важным достоинством этого метода (в отличие от предыдущего) является отсутствие необходимости выявления особых точек на местности. Проблемной стороной является нарастание ошибки в процессе интегрирования. Таким образом, имеется аналог «дрейфа» оценки местоположения, и точность оценивания ухудшается с течением времени (или с ростом пройденного пути).
Два изложенных подхода объединяет необходимость анализа последовательных изображений.
3. Третий подход позволяет компенсировать эффект «дрейфа», применяя дополнительный алгоритм прямого оценивания местоположения. Применяются данные цифрового рельефа местности (ЦРМ), позволяющую через матрицу высот над уровнем моря дискретно определять координаты местоположения.
Применяемые методы позволяют комплексировать данные ЦРМ и видовые данные, полученные с камеры объекта для оценки положения и ориентации объекта, минуя стадию восстановления рельефа по видеоданным [1].
Известна система автономной посадки беспилотного летающего аппарата (БПЛА) на движущееся судно, (RU №110070, 2011 г.), содержащая телевизионную систему самонаведения, связанную с системой управления движением БПЛА, и судовое посадочное оборудование, в состав которого входят захватное приспособление, установленное на выносном конце поворотной кран-балки, и световые маяки, отличающаяся тем, что в состав судового посадочного оборудования входят, по меньшей мере, три световых маяка, первый из которых установлен на кронштейне, стойка которого расположена за пределами зоны тормозного пути БПЛА и отнесена вдоль борта судна вперед относительно стойки кран-балки, на которой установлены второй и третий световые маяки, причем второй и третий световые маяки образуют основание равностороннего треугольника, вершиной которого является проекция первого светового маяка на вертикальную плоскость, проходящую через второй и третий световые маяки при установке кран-балки перпендикулярно борту судна, а в геометрическом центре этого треугольника расположена точка прицеливания, на которую БПЛА наводится посредством телевизионной системы самонаведения, которая содержит телевизионную камеру, блок управления полем зрения, выход которого соединен с управляющим входом телевизионной камеры, блок обработки видеосигнала, блок определения направления на точку прицеливания, блок определения дальности, блок определения параметров качки, блок памяти и блок коррекции направления на точку прицеливания, при этом выход блока определения дальности и выход блока определения направления на точку прицеливания, на котором формируется текущее значение угла поворота линии визирования точки прицеливания, соединены с соответствующими входами блока коррекции направления на точку прицеливания и блока определения параметров качки, выходы которого по сигналам текущих значений амплитуды и периода качки и выход блока определения направления на точку прицеливания, на котором формируется текущее значение угла наклона линии визирования точки прицеливания, соединены с соответствующими входами блока коррекции направления на точку прицеливания, входы которого по сигналам текущих значений углов рысканья и тангажа БПЛА соединены с соответствующими выходами навигационного устройства, входящего в состав системы управления движением БПЛА, которая содержит также блок расчета углов атаки и скольжения, блок определения модуля скорости и блок формирования сигналов управления положением БПЛА, выходы которого через блок рулевых приводов связаны с соответствующими входами блока рулей БПЛА, при этом входы блока формирования сигналов управления положением БПЛА, на которые поступают скорректированные значения углов поворота и наклона линии визирования точки прицеливания, соединены с соответствующими выходами блока коррекции направления на точку прицеливания, входы, на которые поступают значения коэффициентов передачи контуров управления по углам рысканья, тангажа и крена и значения коэффициентов передачи контуров управления скоростями рысканья, тангажа и крена, соединены с соответствующими выходами блока памяти, входы, на которые поступают текущие значения углов рысканья, тангажа и крена и текущие значения угловых скоростей рысканья, тангажа и крена БПЛА, соединены с соответствующими выходами навигационного устройства, а входы, на которые поступают текущие значения углов атаки и скольжения, соединены с выходами блока расчета углов атаки и скольжения, входы блока расчета модуля скорости соединены с выходами навигационного устройства, на которых формируются текущие значения продольной, вертикальной и боковой составляющих скорости БПЛА, а его выход соединен с соответствующими входами блока коррекции направления на точку прицеливания и блока расчета углов атаки и скольжения, входы которого по сигналам вертикальной и боковой составляющих скорости БПЛА соединены с выходами навигационного устройства, выход телевизионной камеры, на котором формируется текущее значение угла зрения телевизионной камеры в горизонтальной плоскости, соединен с соответствующими входами блока определения направления на точку прицеливания и блока определения дальности, выход, на котором формируется текущее значение угла зрения телевизионной камеры в вертикальной плоскости, соединен с соответствующим входом блока определения направления на точку прицеливания, а выходы телевизионной камеры, на которых формируются сигнал синхронизации по строкам и значение амплитуды опрашиваемого элемента разрешения, соединены с соответствующими входами блока обработки видеосигнала, выходы блока обработки видеосигнала, на которых формируются текущие значения вертикальной и горизонтальной координат первого, второго и третьего маяков, соединены с соответствующими входами блока определения направления на точку прицеливания, кроме этого, выход блока обработки видеосигнала, на котором формируется текущее значение вертикальной координаты первого маяка, соединен с соответствующим входом блока управления полем зрения, а выходы, на которых формируются текущие значения горизонтальных координат второго и третьего маяков, соединены с соответствующими входами блока определения дальности и блока управления полем зрения, выходы блока памяти, на которых формируются значения количества элементов разрешения по горизонтали и вертикали между центром кадра и каждым из маяков в случае, когда положение центра треугольника, образованного первым, вторым и третьим световыми маяками, совпадает с центром кадра телевизионной камеры, соединены с соответствующими входами блока определения направления на точку прицеливания, выходы, на которых формируются значения величин среднего квадратичного отклонения амплитуды шума и вероятности ложной тревоги, соединены с соответствующими входами блока обработки видеосигнала, выходы блока памяти, на которых формируются значения количества элементов разрешения в строке и столбце телевизионной камеры, соединены с соответствующими входами блока обработки видеосигнала и блока управления полем зрения, выход, на котором формируется значение коэффициента передачи контура управления полем зрения, соединен с соответствующим входом блока управления полем зрения, а выходы, на которых формируются значение расстояния вдоль кран-балки между вторым и третьим световыми маяками и значение количества элементов разрешения в строке телевизионной камеры, соединены с соответствующими входами блока определения дальности [2].
Известный БПЛА предназначен для выполнения узкой специфической задачи - его посадки на судно, на котором оборудованы специальные маяки - ориентиры для обеспечения автосопровождения в точку приземления, и приспособления для торможения.
Недостаток данной системы автосопровождения заключается в том, что для получения необходимой точности позиционирования, необходимы специальные маячки и другие приспособления, что ограничивает радиус его применения.
Известен беспилотный летательный аппарат для мониторинга протяженных объектов (RU №137016, 2014 г.) включающий планер, силовую установку, систему автоматического и дистанционного управления полетом летательного аппарата и работой его систем, бортовую систему диагностики состояния протяженных объектов, оборудован универсальной гиростабилизированной платформой с возможностью одновременного размещения на ней по меньшей мере одного датчика прибора, выбранного из группы фото- или видеосъемка, а также тепловизора и газоанализатора, причем планер включает сменный фюзеляж и крыло [3].
Недостатками данной системы являются необходимость непрерывного излучения электромагнитной энергии на протяжении всего полета, следовательно, незащищенность от возможных организованных помех, а также отсутствие признаков локальной идентификации протяженных объектов, и как следствие, неудовлетворительная точность наведения БПЛА, определяемая лишь данными системы ГЛОНАСС/GPS.
Наиболее близким по технической сущности к заявленному изобретению является система управления беспилотным летательным аппаратом (RU155323, 2015 г.). содержащая систему автоматического и дистанционного управления полетом летательного аппарата, включающую в себя спутниковую навигационную систему беспилотного летательного аппарата, приемник сигналов дистанционного управления, блок коррекции сигналов управления, а также автопилот для управления аэродинамической поверхностью беспилотного летательного аппарата, и оптико-электронную систему, состоящую из гиростабилизированной платформы с размещенными на ней датчиками изображения, работающими в видимом и инфракрасном диапазонах излучения, связанными с передатчиком информации, в нее введена система автоматического распознавания и автосопровождения объектов наблюдения, включающая блок эталонного изображения, блок распознавания по эталону, блок препарирования изображения, блок принятия решения, блок автосопровождения и координатной поправки, формирователь экранной информации, при этом выход блока эталонного изображения соединен с первым входом блока распознавания по эталону, второй вход которого подключен к выходу блока препарирования изображения, выход блока распознавания по эталону соединен с входом блока принятия решения, первый выход которого подключен к входу блока автосопровождения и координатной поправки, а второй выход соединен с первым входом блока препарирования изображения, второй вход которого подключен к выходу оптико-электронной системы, к первому входу формирователя экранной информации и к второму входу блока автосопровождения и координатной поправки, первый выход которого соединен с вторым входом формирователя экранной информации, выход которого подключен к входу передатчика информации, второй выход блока авто сопровождения и координатной поправки соединен с входом блока коррекции сигналов управления [4].
Недостатками прототипа являются:
- обязательная заблаговременная подготовка актуальной информации, в виде изображений охраняемой местности или объектов ориентиров;
- отсутствие решения в случаях подмены или выхода из строя приемника спутникового сигнала до зоны вероятной организованной помехи линии радиосвязи и как следствие непопадание БПЛА в область эталонных изображений охраняемой местности или объектов ориентиров, ввиду нарастающих ошибок в определении координат;
- не учтена продолжительность времени, затрачиваемого на сравнение изображений, в случае большого количества заложенных эталонных изображений охраняемой местности или объектов ориентиров.
Целью настоящего изобретения является создание способа коррекции малоточной БИНС автономного БПЛА, малой дальности и ближнего радиуса действия с использованием интеллектуальной системы геопространственной информации (ИСГИ), позволяющей проводить коррекцию БИНС в отсутствии заблаговременно подготовленных эталонных изображений при полном или частичном отсутствии сигналов от СНС с учетом продолжительности времени, затрачиваемого на сравнение эталонных изображений с текущими.
Требуемый технический результат достигается тем, что при способе коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации, заключающегося в автоматическом обнаружении области или объекта наблюдения, получении достоверного результата автоматического опознавания, автосопровождении объекта и формировании коррекционных координатных коэффициентов за счет получения рассогласования относительно текущих координат опознанного изображения, дополнительно приводится интеллектуальный процесс обработки изображений, заключающийся в расчете периода формирования областей коррекции для создания эталонного изображения при полете в точку разворота и обосновании высоты обратного полета с помощью рассчитанных коэффициентов характеризующих разреженность общих точек подстилающей поверхности и фактическую долю общности эталонного изображения от текущего.
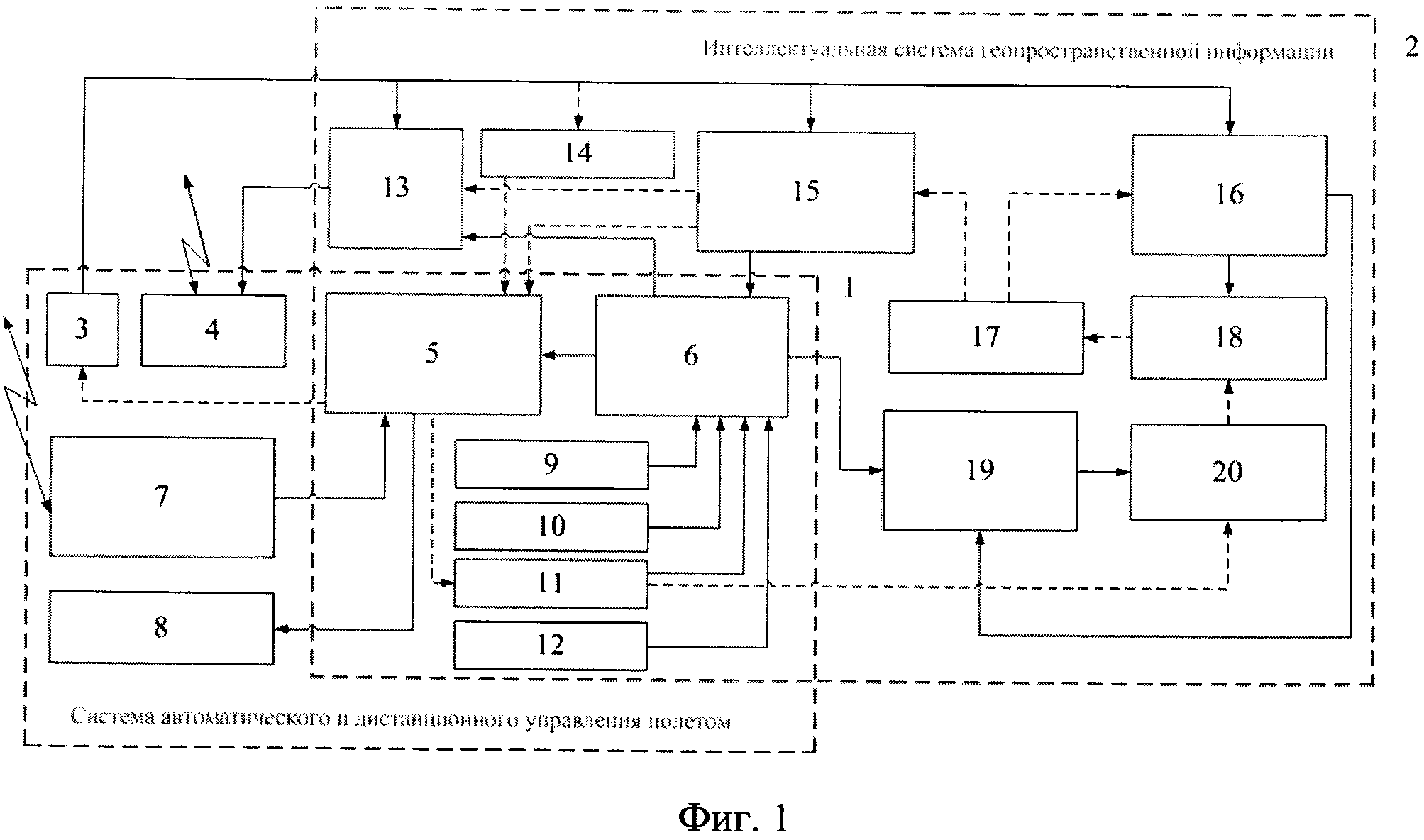
Сущность изобретения поясняется функциональной схемой, где на фиг. 1 изображены:
1 - система автоматического и дистанционного управления полетом;
2 - интеллектуальная система геопространственной информации;
3 - оптико-электронная система (ОЭС);
4 - передатчик информации;
5 - блок коррекции сигналов управления;
6 - блок определения достоверных координат;
7 - приемник сигналов дистанционного управления;
8 - автопилот;
9 - баровысотомер;
10 - магнитометр;
11 - инерциальная навигационная система;
12 - спутниковая навигационная система;
13 - мультиплексор;
14 - хронограф;
15 - блок автосопровождения и координатной поправки;
16 - блок препарирования информации;
17 - блок принятия решения;
18 - блок распознавания по эталону;
19 - блок создания эталонного изображения;
20 - блок хранения эталонных изображений.
Изобретение работает следующим образом: в процессе штатного полета происходит выполнение алгоритма формирования областей коррекции в ИСГИ. Для реализации алгоритма, на этапе предпусковой подготовки рассчитывается период формирования областей коррекции ΔTфок.
Время на расчетную траекторию определяется по формуле:

где tpт - длина расчетной траектории по времени, КТ - количество периодов создания областей коррекции, tдоп - допустимое время прямолинейного полета с момента наступления нештатной ситуации, Rпов - радиус поворота БПЛА, Vпов - скорость полета БПЛА при совершении поворота.
Выражение в уравнении (1) представляет время, затрачиваемое на совершение маневра по развороту БПЛА и определяется из формулы по нахождению длины окружности, в данном случае ее половины. Решая, уравнение (1) относительно ΔТфок, получим:
в уравнении (1) представляет время, затрачиваемое на совершение маневра по развороту БПЛА и определяется из формулы по нахождению длины окружности, в данном случае ее половины. Решая, уравнение (1) относительно ΔТфок, получим:

Расчет периода формирования областей коррекции является обязательным условием для функционирования алгоритма формирования областей коррекции в блоке формирования области коррекции 19.
Система автоматического и дистанционного управления полетом 2 обеспечивает взаимосвязь БПЛА с наземным пунктом управления через передатчика информации 4. Для этого мультиплексор 13 формирует информацию от ОЭС 7 и блока определения достоверных координат 6. Координаты БПЛА определяются спутниковой СНС 12 и в блоке 6, благодаря избыточности получаемой информации от баровысотомера 9, магнитометра 10 и БИНС 11 проверяются на достоверность. На наземном пункте управления оператор, наблюдая за изображением с геопространственной привязкой, может вносить изменения в траекторию полета через приемник сигналов дистанционного управления 7.
Тем временем, в полете ИСГИ 2 с периодом формирования областей коррекции ΔТфок проводит обработку серии последовательных изображений с ОЭС 3. Предварительно обработанное изображение с выхода блока препарирования информации 16 подается на вход блока создания эталонного изображения, где происходит геопространственная привязка снимка по информации с блока 6. Обработанное изображение сохраняется в блоке хранения эталонных изображений 20.
В случае потери сигнала со спутниками, выхода из строя СНС или определении подмены навигационного поля блоком определения достоверных координат 6 отключается контур сохранения эталонного изображения. Для навигации БПЛА используются области коррекции, сформированные во время полета в штатном режиме или заблаговременно подготовленные эталонные изображения блока 20.
По причине нарастания погрешностей БИНС существует возможность того, что при неизменной высоте, БПЛА не пересечет реперную область и не сможет провести коррекцию. Для формирования необходимых условий захвата участков местности текущими изображениями ОЭС в блоке коррекции сигналов управления 5 применяется алгоритм расчета высоты полета БПЛА.
Формируются исходные данные: XS, YS, ZS - координаты точки старта, XF, YF, HF - координаты точки F начала маневра по развороту,  - координаты геометрических центров областей коррекции, Ii - изображение областей коррекции с геопространственной привязкой, tкрит - расчетная длительность полета БПЛА в отсутствии спутникового сигнала, в течение которого требуется коррекция ИНС,
- координаты геометрических центров областей коррекции, Ii - изображение областей коррекции с геопространственной привязкой, tкрит - расчетная длительность полета БПЛА в отсутствии спутникового сигнала, в течение которого требуется коррекция ИНС, - координаты угловых точек периметра области коррекции,
- координаты угловых точек периметра области коррекции,  - коэффициент, характеризующий долю от всей площади для каждой области коррекции, необходимой для определения минимального количества общих точек, позволяющих провести коррекцию,
- коэффициент, характеризующий долю от всей площади для каждой области коррекции, необходимой для определения минимального количества общих точек, позволяющих провести коррекцию,  - высота, на которой были получены изображения каждой области коррекции.
- высота, на которой были получены изображения каждой области коррекции.
Проводится расчет координат точки окончания маневра для прямолинейного полета к следующей точке маршрута.
Определяется максимальное отклонение от области коррекции. Максимальная погрешность рассчитывается по техническим характеристикам БИНС за время полета до области коррекции.
Достаточная максимальная высота Н2 определяется по формуле:

где H2mах - достаточная максимальная высота полета над областью коррекции, м; H1 - высота создания изображений области коррекции, м; К1 минимальная доля эталонного изображения, необходимая для проведения коррекции, %; К2 - минимальная доля общности эталонного изображения от текущего, %.
Коэффициент К1 характеризует разреженность общих точек подстилающей поверхности с высоты H1. Минимальное количество общих точек μ, необходимое для проведения коррекции с высоты Н2 принимает значение равное μ=3. Для каждой области коррекции рассчитывается минимальная площадь, которая должна попасть в объектив ОЭС с высоты и иметь три общие точки, при любом случайном направлении пересечения.
От датчиков ОЭС 3 изображение поступает на входы блока препарирования информации 16, блока автосопровождения и координатной поправки 15 и хронограф 15. Предварительно обработанное изображение с выхода блока 16 подается на один из входов блока распознавания по эталону 18, на другой вход подается эталонное изображение, хранящееся в блоке хранения эталонных изображений 20. В целях сокращения времени сопоставления эталонного изображения с текущим, используется грубая информация инерциальной навигационной системы 11, которая поступает на один из входов блока 20 и задает определенный диапазон для перебора эталонных изображений.
В блоке 18 определяется степень сходства текущего изображения с эталоном, и результат передается в блок принятия решения 17. В случае неудовлетворительного результата, т.е. оценка сходства ниже установленного критерия, соответствующий сигнал передается в блок 16 для внесения изменений в алгоритм предобработки текущего изображения. Это может быть изменение масштаба, поворот изображения, контурное или двухуровневое представление изображения, переключение спектрального диапазона с видимого на инфракрасный и наоборот, и др. В случае удовлетворительной оценки идентификации, необходимый сигнал поступает на вход блока 15, в котором производится захват и автосопровождение идентифицированного объекта, определение новых координат в поле зрения оптического средства. Одновременно с сигналом блока 15 в блок 5 коррекции сигналов управления поступает сигнал с хронографа 14. В блоке 5 происходит учет времени, потребовавшегося на идентификацию изображения и формируется сигнал коррекции для БИНС 11 относительно текущих координат опознанного изображения. Процесс анализа сходства изображения и принятия решения повторяется в каждом последующем кадре видеопоследовательности.
Таким образом, в предлагаемом новом способе помимо перечисленных в ближайшем аналоге, используются следующие дополнительные действия:
1. На этапе заблаговременной подготовки информации рассчитывается период формирования областей коррекции.
2. В штатном полете БПЛА с периодом формирования областей коррекции создаются изображения с геопространственной привязкой.
3. Проводится интеллектуальная обработка изображений. Рассчитываются коэффициенты, характеризующие разреженность общих точек подстилающей поверхности и фактическую долю общности эталонного изображения от текущего, необходимые для определения достаточной высоты полета БПЛА.
Сравнительный анализ существенных признаков существующих способов определения параметров навигации БПЛА и настоящего способа показывает, что предложенный способ, основанный на использовании дополнительных операций, связанных с формированием периода областей коррекции, интеллектуальной обработкой изображений и расчетом высотных коэффициентов отличается тем, что за счет обработки избыточной информации обеспечивается более точное определение текущих навигационных параметров в отсутствии сигналов от СНС.
Таким образом, достигается технический результат изобретения -повышение точности позиционирования БПЛА в автономном режиме, при использовании малогабаритных навигационных чувствительных элементов, вследствие обнуления нарастающих ошибок БИНС.
Источники информации:
1. Kupervasser О. Yu., Voronov V.V. Correction of inertial navigation system's errors by the help of video-based navigator based on Digital Terrarium Map.
2. Полезная модель RU №110070, МПК B64F 1/18; B64C 13/18; П05 В 1. 10, опубликовано: 10.11.2011.
3. Полезная модель RU №137016, МПК B64D 43/00, опубликовано: 27.01.2014.
4. Полезная модель RU №155323, МПК B64D 43/00, опубликовано: 27.09.2015.
Способ позиционирования беспилотного летательного аппарата (БПЛА) в автономном режиме, заключающийся в том, что непрерывно определяют текущие координаты информационно-измерительными устройствами малоточной бесплатформенной инерциальной навигационной системой (БИНС) БПЛА, проводят периодическую коррекцию текущего положения по сигналам спутниковой навигации (СНС), осуществляют проверку данных СНС на достоверность, в автоматическом режиме фиксируют области или объекты наблюдения по информации оптико-электронной системы, формируют коррекционные поправки для текущих координат БПЛА, отличающийся тем, что на этапе предпусковой подготовки рассчитывают период формирования областей коррекции данных бесплатформенной инерциальной системы, в процессе полета производят обработку, геопространственную привязку и сохраняют изображения на борту БПЛА, формируют исходные данные: координаты точки старта X, Y, Z, координаты точки начала маневра по развороту X, Y, H, координаты геометрических центров областей коррекции , максимальную высоту полета H, минимальное количество общих точек коррекции μ, минимальную долю эталонного изображения К, минимальную долю общности изображений К, производят расчет координат точки окончания маневра для прямолинейного полета к следующей точке маршрута, для навигации определяют степень сходства текущего изображения с эталоном, производят захват и автосопровождение идентифицированного объекта, формируют сигнал коррекции для БИНС относительно текущих координат, производят определение новых координат, повторяют процесс анализа сходства и принятия решения для каждого последующего кадра.
Способ поиска и идентификации токсичных осколков разрушившегося в результате аварийных воздействий ядерно- и радиационно опасного объекта
Устройство управления комбинированным индукторным генератором
Устройство для тренировки бега по пересеченной местности
Универсальный инициатор-резак для бортовых детонационных систем разделения
Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении
Устройство для организации базы эталонов единиц величин
Способ калибровки гироблоков платформы трехосного гиростабилизатора
Способ актуализации высотно-гравиметрических параметров в локальной области картографической информации
Способ обнаружения и автосопровождения объектов целеуказания оптико-электронной системой беспилотного летательного аппарата

