Результат интеллектуальной деятельности: Автономный мобильный многофункциональный роботизированный комплекс
Вид РИД
Изобретение
Изобретение относится к области машиностроения, а именно к автономным мобильным многофункциональным роботизированным комплексам (МРК), предназначенным для городских и пригородных перевозок груза, а также для работ в опасных для присутствия человека условиях.
Известен аналог, автономное мобильное робототехническое транспортное средство содержащее корпус, силовую и трансмиссионную установки, аппаратуру и средства управления движением, приборы и устройства для сбора обработки и передачи информации о природных процессах (поисковое оборудование), другие устройства средств хранения информации, связи и управления, а также присоединительные блоки, на которые устанавливается один из движителей: колесный, гусеничный и роторно-винтовой.
Машина оснащена устройством непрерывного контроля состояния поверхности пути и устройством выбора направления движения по прочности опорного основания.
В качестве устройства непрерывного контроля состояния поверхности пути используются дальномеры, установленные на выступающей части корпуса машины. Они обеспечивают непрерывную регистрацию расстояния до недеформированной поверхности пути и передачу данных на ЭВМ, в котором производится сравнение показаний дальномеров с заданным предельным значением, соответствующим потери подвижности одного из используемых движителей.
Устройство выбора направления движения представляет собой установленную поворотно на корпусе машины шарнирную гибкую консоль достаточной длины, на свободном конце которой закреплен измеритель (например, в виде конусного твердомера) твердости грунта, соединенный информационным каналом с бортовой ЭВМ.
В случае угрозы потери подвижности (приближении показаний дальномеров к заданному предельному значению) мобильная консоль с помощью твердомера «ощупывает» поверхность пути для выбора направления движения.
В результате, машина получает команду на выполнение маневра (поворота) в сторону максимально прочного грунтового основания.
Автономное мобильное робототехническое транспортное средство предназначено для доставки приборов и оборудования мониторинга окружающей природной среды в малодоступной (недоступной или опасной) для человека обстановке (см. патент РФ на полезную модель №158616, опубликовано 20.01.2016).
Недостатки этого робототехнического комплекса заключаются в узкой специализации и ограниченной автономности, что приводит к невозможности применения на дорогах общего назначения.
Наиболее близкой по совокупности существенных признаков является роботизированная транспортная платформа, относящаяся к специальной технике предназначенной для дистанционной работы в условиях боевых действий, а также в труднодоступных и опасных для присутствия человека местах. Роботизированный комплекс предназначен для сбора и передачи разведывательной информации, охраны или патрулирования гражданских и военных объектов, проведения антитеррористических операций в городских и полевых условиях, ведения стрельбы по различным видам целей в дневных и ночных условиях. В качестве самоходного управляемого транспортного средства использован колесный движитель повышенной проходимости с приводом от двигателя внутреннего сгорания. Платформа оснащена системой топопривязки и навигации, системой технического зрения, информационно-вычислительной системой, состоящей из двух бортовых компьютеров, аппаратурой для обеспечения резервной связи по каналам системы связи и передачи данных (см. патент на изобретение РФ №2506157, опубликовано 10.02.2014).
Недостатки указанного робототехнического комплекса заключаются в узкой специализации и ограниченной автономности, что приводит к невозможности его применения на дорогах общего назначения.
Предлагаемым изобретением решается задача расширения функциональных возможностей автономного, мобильного робототехнического транспортного средства, выполненного на базе серийного транспортного средства с минимальными доработками, и обеспечения его полной автономности не только при движении по грунтовым поверхностям, но и по дорогам общего пользования, без участия водителя (оператора), основываясь на считывании дорожной сцены, анализа (обработки) и передачи команд на управление транспортным средством.
Поставленная задача решается за счет того, что автономный, мобильный многофункциональный роботизированный комплекс (МРК), содержащий самоходное управляемое транспортное средство повышенной проходимости с двигателем внутреннего сгорания, пульт дистанционного управления, спутниковую навигационную систему, систему управления узлами и агрегатами, систему связи и передачи данных, систему технического зрения, дополнительно оснащен: системой видеонаблюдения за окружающим пространством и дорожной сценой, бортовым навигационным оборудованием для определения местоположения и курса автономного движения и движения в колонне, комплектом оборудования для объезда препятствий и предотвращения столкновений и системой автономной аварийной остановки и сигнализации, кроме этого система машинного зрения оснащена стереокамерой и лазерным сканером, а узлы и агрегаты транспортного средства управляются непосредственно при помощи сигналов ЭВМ.
Совокупность отличительных признаков, заключающийся в том, что автономный, мобильный многофункциональный роботизированный комплекс (МРК) дополнительно оснащен: системой видеонаблюдения за окружающим пространством и дорожной обстановкой, бортовым навигационным оборудованием для определения местоположения и курса автономного движения и движения в колонне, комплектом оборудования для объезда препятствий и предотвращения столкновений и системой автономной аварийной остановки и сигнализации, кроме этого система машинного зрения оснащена стереокамерой и лазерным сканером, а узлы и агрегаты транспортного средства управляются непосредственно при помощи сигналов ЭВМ позволяет расширить функциональные возможности робототехнического транспортного средства, выполненного на базе серийного транспортного средства с минимальными доработками и обеспечить полную автономность не только при движении по грунтовым поверхностям, но и при движении по дорогам общего пользования, без участия водителя (оператора), основываясь на считывании дорожной сцены, анализа (обработки) и передачи команд на управление транспортным средством.
Заявителю не известен автономный, мобильный многофункциональный роботизированный комплекс (МРК), с указанной совокупностью существенных признаков и заявленная совокупность существенных признаков не вытекает явным образом из современного уровня техники, что подтверждает соответствие заявляемого технического решения условию «новизна».
Изобретение иллюстрируется чертежами, на которых представлено:
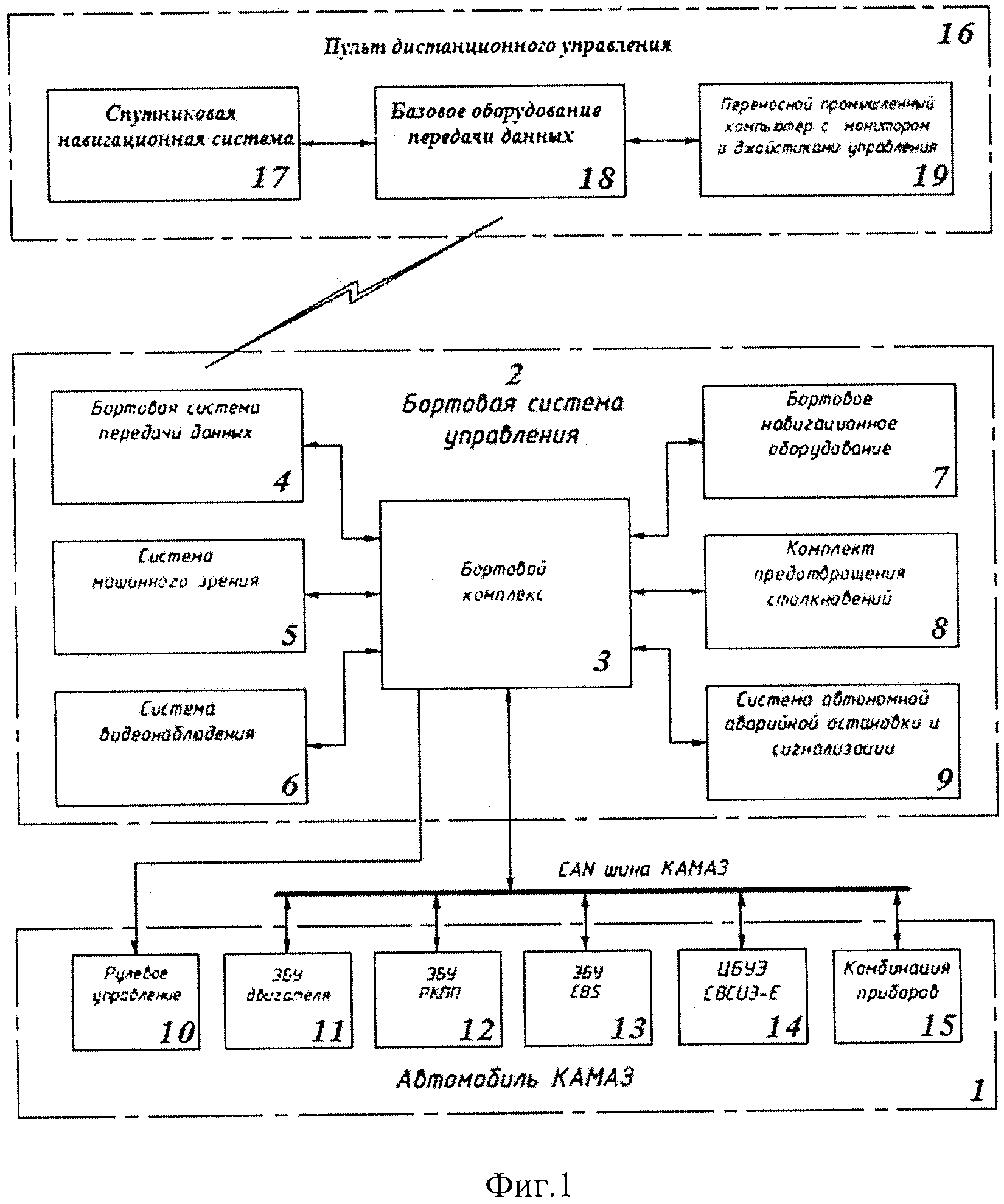
Фиг. 1 - Автономный мобильный многофункциональный роботизированный комплекс (МРК). Структурная схема;
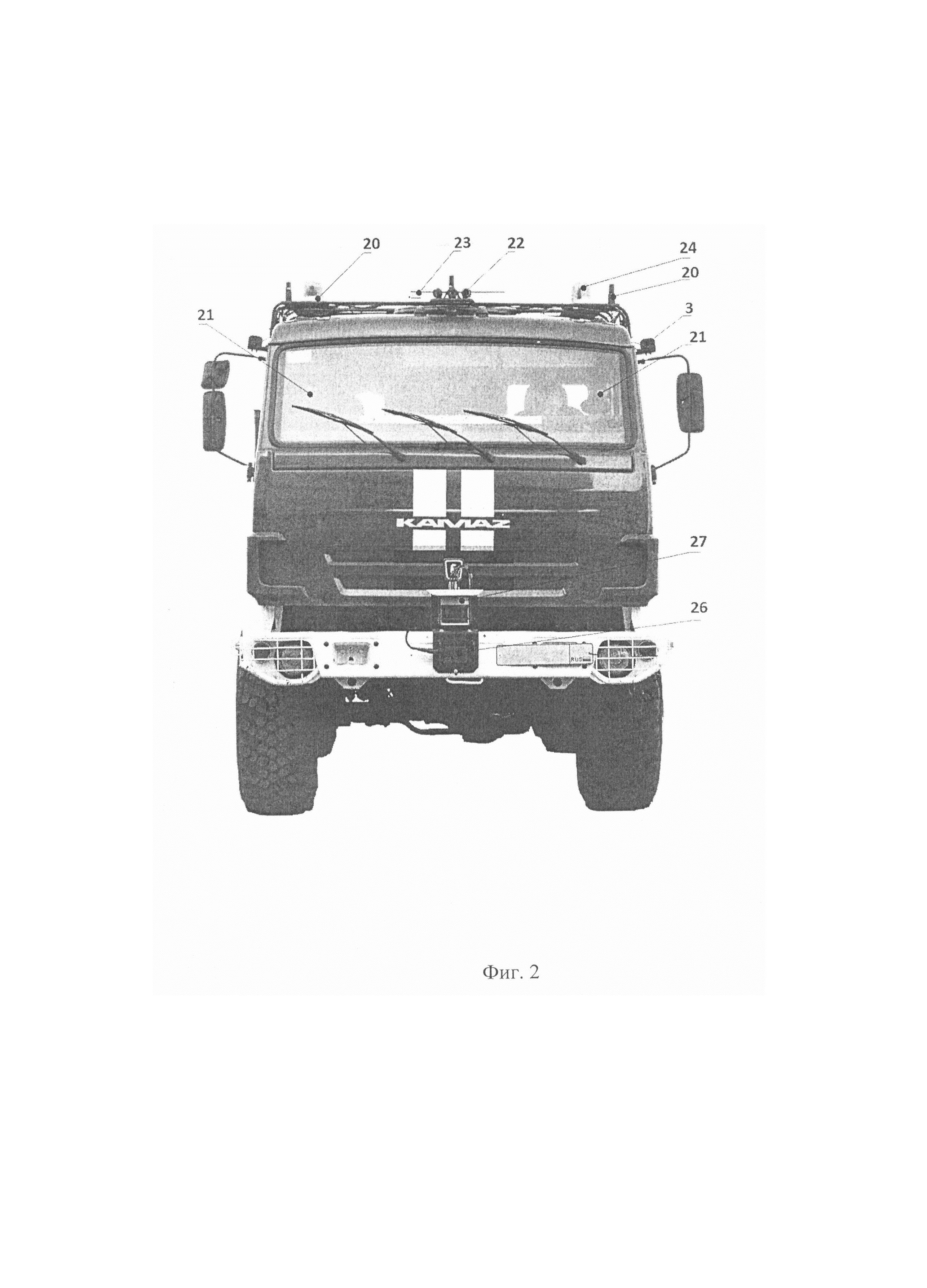
Фиг. 2 - Автономный мобильный многофункциональный роботизированный комплекс (МРК). Вид спереди;
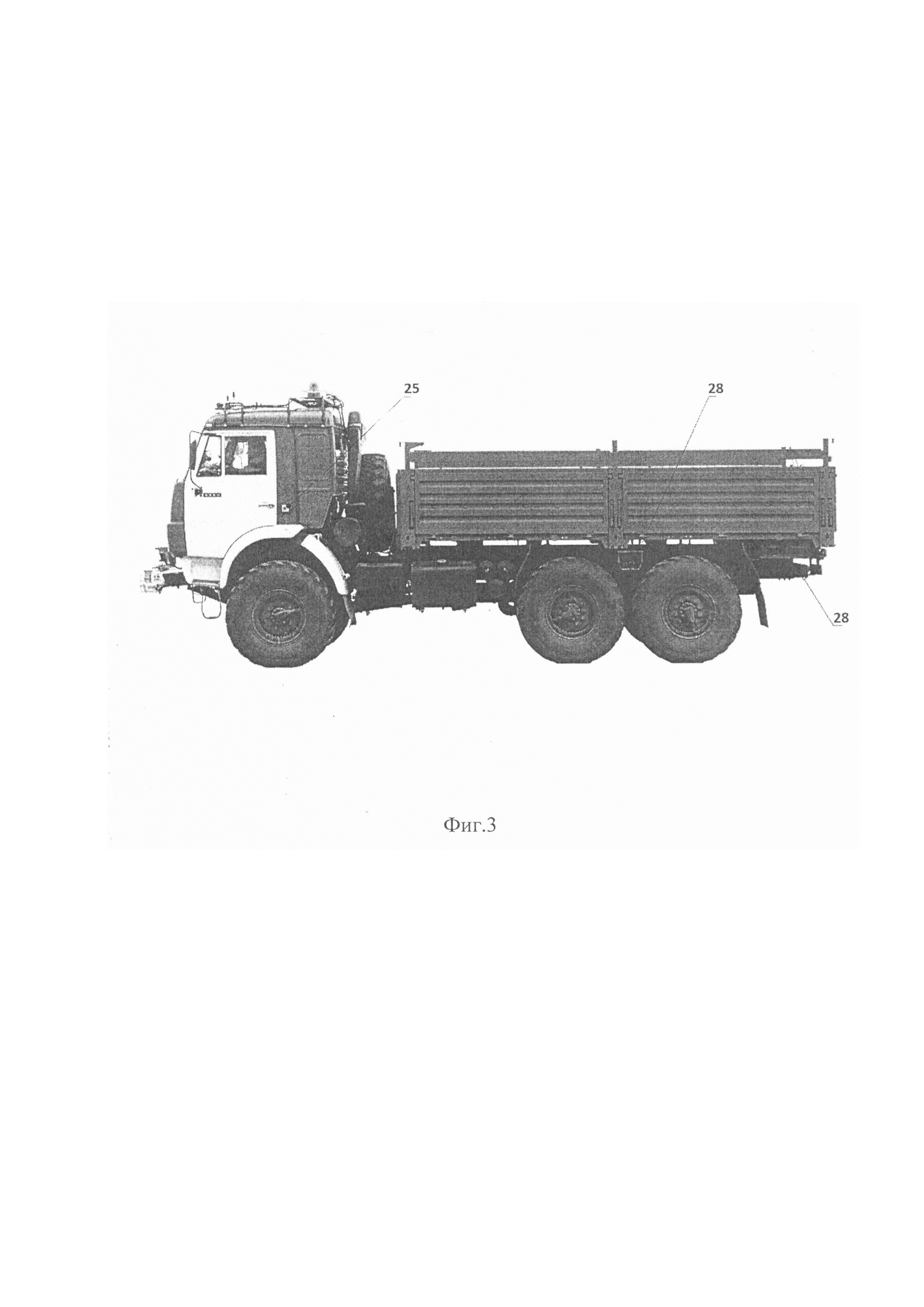
Фиг. 3-Автономный мобильный многофункциональный роботизированный комплекс (МРК). Вид слева.
Автономный, мобильный многофункциональный роботизированный комплекс (МРК) предназначен для городских и пригородных перевозок груза, а также для работы в опасных условиях, где жизнь человека может быть подвержена угрозе (ликвидация пожаров, зоны радиационного заражения и пр.), посредством:
- дистанционного управления;
- движения по заранее заданному маршруту с помощью навигационного комплекса;
- автоматического движения по маршруту с детекцией возможного направления движения транспортного средства из точки А в точку В, с учетом известных свойств дорожной сцены испытательного полигона, при отсутствии проложенного маршрута по ГЛОНАСС/GPS множеством точек;
- автоматического движения за ведущим транспортным средством (при условии нахождения ведущего транспортного средства в зоне видимости системы машинного зрения и использования в качестве ведущего транспортного средства одного командного автомобиля, в котором размещен пульт дистанционного управления).
Заявляемое техническое решение позволяет создать МРК, который может управляться как водителем, так и дистанционно, либо работать в автономном режиме, что значительно расширяет его функциональные возможности и области применения.
Архитектура системы дистанционного и автономного управления МРК разработана с учетом конструктивных особенностей полноприводного автомобиля КАМА3-5350 с сохранением штатного режима управления автомобилем водителем из кабины. Для реализации технических решений в системе управления применены современные высокопроизводительные компьютеры с кондуктивным охлаждением, оборудование беспроводной передачи данных, высокоточной навигации, видеонаблюдения, сенсоры и датчики, рассчитанные на жесткие условия эксплуатации, разработаны алгоритмы дистанционного и автономного управления и программное обеспечение
Заявляемый автономный, мобильный многофункциональный роботизированный комплекс (МРК) состоит из шасси с двигателем внутреннего сгорания 1, оснащенного бортовой системой управления 2, включающего бортовой комплекс 3 в составе бортовой системы передачи данных 4, системы машинного зрения 5, системы видеонаблюдения 6, бортового навигационного оборудования 7, комплекта оборудования для объезда препятствий и предотвращения столкновений 8, системы автономной аварийной остановки и сигнализации 9, блоком рулевого управления 10, электронным блоком управления двигателя (ЭБУ) 11, электронным блоком управления коробкой переключения передач 12, электронным блоком управления тормозами 13, блоком управления световой и звуковой сигнализацией 14, комбинацией приборов 15, а также переносным пультом управления 16, в составе: спутникового навигационного оборудования 17, базового оборудования передачи данных 18 и переносного промышленного компьютера с монитором и джойстиком управления 19.
Заявляемый автономный, мобильный многофункциональный роботизированный комплекс (МРК) работает следующим образом: для реализации основных функций МРК в дистанционном и автономном режимах бортовая система управления осуществляет сбор и обработку данных следующих устройств и электронных блоков управления (ЭБУ) систем автомобиля: блока рулевого управления 10 (поворот управляемых колес в зависимости от выбранного направления движения), ЭБУ двигателя 11 (пуск, останов и управление оборотами), ЭБУ коробки переключения передач 12 (КПП) (управление трансмиссией в соответствии с логикой работы), ЭБУ тормозной системы 13 (торможение), ЦБУЭ центральный мультиплексный блок управления электрооборудованием 14 (система освещения, световой и звуковой сигнализации), комбинации приборов 15 (контроль параметров).
Кроме того, бортовая система управления 2 обеспечивает контроль работоспособности систем, агрегатов и узлов автомобиля и аварийный останов МРК при возникновении нештатных ситуаций.
Бортовой комплекс 3 обеспечивает дистанционное и автономное управление МРК, обмен данными по бортовой локальной сети Ethernet с оборудованием системы машинного зрения 5, бортовым навигационным оборудованием 7, системой видеонаблюдения 6, бортовой системой передачи данных 4, комплектом оборудования для объезда препятствий и предотвращения столкновений 8, электропитание устройств и аудиоконтроль работы двигателя внутреннего сгорания.
Бортовое навигационное оборудование служит для обеспечения автономного движения МРК по заранее записанной траектории или по карте с сантиметровой точностью. Для этого на кабине МРК установлен бортовой навигационной приемник Trimble ВХ982 RTK REFERENCE/ROVER GPS/GLONASS+Heading, с двумя антеннами 20 типа AV59 L1/L2/L5/G1/G2/Omnistar Aviation Antenna. Одна антенна используется для определения местоположения (координат), а вторая - курса МРК. Навигационное оборудование имеет высокий класс защиты, что позволяет использовать его в жестких условиях эксплуатации.
Основу системы машинного зрения 5 МРК составляет промышленный компьютер с программным обеспечением и стереокамера на основе двух цифровых видеокамер 21 высокого разрешения. Модуль обеспечения видеоданных состоит из цифровых видеокамер высокого разрешения (левая и правая камеры) и монтажного оборудования для обеспечения стереоскопического зрения. Используются две цифровые камеры IDS UI-3360CP-C-HQ с объективами KOWA LM5JC10M. Модуль обеспечивает синхронизированный видеопоток с обеих камер. Частота поступления видеоданных должна быть не менее 7 кадров/сек.
В состав системы машинного зрения 5 МРК входит следующее оборудование: встраиваемый компьютер с программным обеспечением (ПО) для задач машинного зрения, источник бесперебойного питания, цифровые видеокамеры 21.
Система видеонаблюдения 6 служит для обеспечения обзора пространства вокруг МРК. В системе видеонаблюдения 6 используются неподвижно установленные на кронштейнах цветные аналоговые видеокамеры 22 AMOS фирмы Orlaco с инфракрасной светодиодной подсветкой (6 шт.) с комплектом креплений, защитой и кабельной оснасткой, а также одноканальные интегрированные видеоэнкодеры (6 шт.) и коммутатор для реализации IP-видеонаблюдения.
Видеокамеры 22 AMOS выполнены в специальном защитном кожухе и обеспечивают работоспособность в тяжелых условиях эксплуатации.
Инфракрасная светодиодная подсветка камер обеспечивает работу системы видеонаблюдения 6 в условиях низкой освещенности.
Система автономной аварийной остановки и сигнализации 9 обеспечивает останов двигателя внутреннего сгорания, включение стояночного тормоза при возникновении нештатных ситуаций, а также включение световой сигнализации в автономном и дистанционном режиме управления МРК. Нормально замкнутые контакты кнопок «Е-Stop» последовательно включены в минусовую цепь катушки реле. При возникновении внештатной ситуации нажатие одной из кнопок приводит к срабатыванию реле, которое размыкает цепь и двигатель останавливается. Одновременно подается напряжение +24 В на катушку реле, которое снимает питание электромагнитного клапана стояночного тормоза, что приводит к торможению.
В состав системы входит следующее оборудование: кнопочный пост желтого цвета в сборе с красной кнопкой с фиксацией, радиомодуль ввода-вывода информации с щелевой антенной 23, таймер и проблесковый световой маяк 24 (2 шт.). Для дистанционного аварийного останова двигателя внутреннего сгорания и включения стояночного тормоза в схеме управления МРК используются два радиомодуля ввода-вывода информации «Спектр 433 iO». Один радиомодуль, установлен в кейсе оператора переносного пульта управления 16 (ППУ), а второй - в шкафу интеграции. Радиомодуль ввода-вывода «Спектр 433 iO» имеет 4 входа («сухой контакт») и 4 выхода (реле ~240 В, 4 А). Управление входами и выходами осуществляется по радиоканалу на частоте 433,92±0,2% МГц (интерфейс трансляции данных RS-485, протокол MODBUS RTU).
В автономном, мобильном, многофункциональном роботизированном комплексе предусмотрены следующие режимы работы системы автономной аварийной остановки и сигнализации 9: принудительный останов двигателя внутреннего сгорания и включение стояночного тормоза при нажатии бортовой кнопки аварийного останова «Е-Stop» 25 установленной на кабине МРК снаружи или дополнительной кнопки «Е-Stop» в кабине (включена последовательно), принудительный дистанционный останов двигателя внутреннего сгорания и включение стояночного тормоза по беспроводному каналу передачи данных 433 МГц при нажатии оператором переносного пульта управления 16 (ППУ) кнопки аварийного останова «Е-Stop» на переносном пульте управления 16, автоматическое включение стояночного тормоза при сбое программного обеспечения (ПО) компьютера бортовой системы управления 2 или концентратора универсального (КУ), нарушении работоспособности системы беспроводной передачи данных 4 или потере данных по каналу управления 2,4 ГГц (срабатывание таймера), включение световой сигнализации (проблесковых световых маяков 24) при нажатии кнопки «Авторобот».
Комплект оборудования для объезда препятствий и предотвращения столкновений 8 служит для обеспечения безопасности и надежности обнаружения объектов. В его состав входят датчики различного диапазона излучения, размещенные по периметру автомобильного шасси - фронтальный радар 26 и лазерный сканер 27. Это позволяет использовать преимущества каждого типа датчика. Радары, работающие в СВЧ диапазоне, в отличие от лазерных сканеров менее подвержены влиянию осадков и обладают большей надежностью.
Лазерный сканер 27 использует инфракрасное излучение, что обеспечивает более высокую разрешающую способность и скорость сканирования зоны обзора.
В комплект оборудования для объезда препятствий и предотвращения столкновений 8 МРК входят следующие устройства: радар 26 марки «Delphi DELESR-15» работающий в диапазоне 77 ГГц, точность определения направления, скорости и фронтальной дальности которого в три раза выше, по сравнению с радарами 28 Orlaco, работающими в диапазоне 24 ГГц. Он используется для переднего обзора пространства вместе с лазерным сканером 27 марки «LMS511-20100». Обзор пространства в слепых зонах (левый, правый борт и тыл) обеспечивается шестью радарами 28 марки «Orlaco» диапазона 24 ГГц. Данные от радаров 26 и 28 и лазерного сканера 27 используются в алгоритме работы для автоматического снижения скорости или полного останова МРК при обнаружении препятствий во время движения по траектории и маневрировании. Фронтальный радар 26 Delphi DEL-ESR-15 (Electronically Scanning Radar) с электронным сканированием работает в двух режимах обнаружение объектов в диапазоне частот 77 ГГц:
- в секторе 90° на дальности до 60 м.
- в секторе 20° на дальности до 174 м.
Лазерный сканер 27 обеспечивает передний обзор пространства и обнаружение объектов в секторе 190° на дальности от 0,7 до 80 м с угловым разрешением от 0,167 до 1°. Он имеет защищенный корпус и внутренний обогреватель для обеспечения работы при низких температурах и в сложных условиях тумана и дождя. Программное включение обогрева обеспечивается с помощью устройства вывода дискретных сигналов R2DIO DO-16 и интерфейсного модуля реле Р9.
Боковые и тыловые радары 28, обеспечивающие боковой и тыловой обзор пространства, имеют зону обзора по азимуту 70°, по углу места 11°, по дальности от 2 до 20 м. Предусмотрена программная настройка пяти диапазонов дальности. Использование сдвоенных радаров на регулируемых кронштейнах позволяет создавать суммарную диаграмму направленности по азимуту до 140° с каждой стороны установки.
Данные от радаров 26 и 28 и лазерного сканера 27 используются в алгоритме работы для автоматического снижения скорости или полного останова МРК при обнаружении препятствий во время движения по траектории и маневрировании.
Бортовая система передачи данных 4 служит для приема и передачи данных в бортовой системе управления 2. При работе МРК используется мобильный Mesh-маршрутизатор с двумя автомобильными антеннами 20.
Mesh-маршрутизатор обеспечивает безопасное и надежное беспроводное широкополосное соединение с базовым оборудованием передачи данных переносного пульта управления 16, прием и передачу данных и команд управления, телеметрической информации, видеопотока от камер системы видеонаблюдения 6, сигналов громкоговорящей связи и аудиоконтроля работы двигателя внутреннего сгорания.
В состав переносного пульта управления 16 входит: переносной промышленный компьютер с монитором и джойстиками управления 19, с программным обеспечением дистанционного и автономного управления одним автомобилем, спутниковая навигационная система 17 и базовое оборудование передачи данных 18.
Заявляемый автомобиль с МРК соответствует требованию промышленной применимости и может быть изготовлен из серийных образцов автомобилей КАМАЗ с использованием современных материалов, оборудования и технологий.
Автономный мобильный многофункциональный роботизированный комплекс (МРК), содержащий самоходное управляемое транспортное средство повышенной проходимости с двигателем внутреннего сгорания, пульт дистанционного управления, спутниковую навигационную систему, систему управления узлами и агрегатами, систему связи и передачи данных, систему машинного зрения, отличающийся тем, что он снабжен бортовой системой управления МРК с переносным пультом управления, состоящим из промышленного компьютера с программным обеспечением, упомянутой спутниковой навигационной системы, оборудования передачи данных и джойстика управления, которая обеспечивает возможность дистанционного и автономного управления, при этом основу системы машинного зрения составляет промышленный компьютер с программным обеспечением и стереокамера на основе двух цифровых видеокамер высокого разрешения, обеспечивающих синхронизированный видеопоток с частотой поступления видеоданных не менее семи кадров в секунду, причем МРК дополнительно оснащен системой видеонаблюдения за окружающим пространством и дорожной сценой на основе цветных аналоговых видеокамер с инфракрасной светодиодной подсветкой, бортовым навигационным оборудованием для определения местоположения и курса автономного движения и движения в колонне в составе навигационного приемника с двумя антеннами для определения местоположения и курса, комплектом оборудования для объезда препятствий и предотвращения столкновений в составе фронтального радара, работающего в СВЧ диапазоне, и лазерного сканера, использующего инфракрасное излучение, системой автономной аварийной остановки и сигнализации в составе двух радиомодулей ввода и вывода информации в переносном пульте и в самоходном транспортном средстве, и кнопочного поста с фиксацией, при этом упомянутые системы и оборудование МРК выполнены с возможностью обмена данными по бортовой системе передачи данных в составе мобильного Mech-маршрутизатора с двумя антеннами, а узлы и агрегаты самоходного транспортного средства выполнены с возможностью управления непосредственно при помощи сигналов ЭВМ.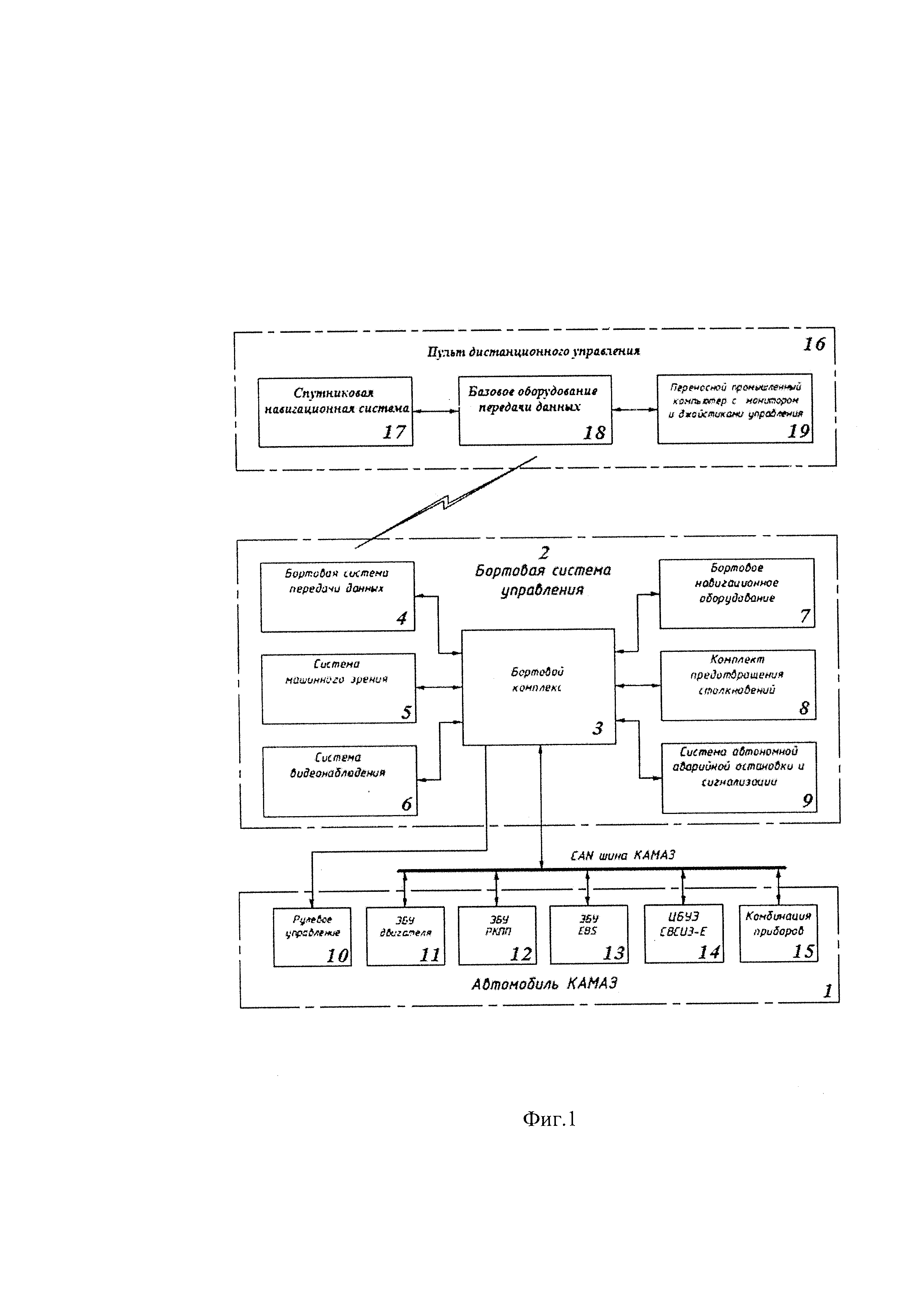
Приспособление для затылования зубьев плоской протяжки
Зубофрезерный станок для изготовления глобоидного червяка
Смазочно-охлаждающая жидкость на масляной основе
Способ лазерного восстановления режущей кромки зубьев фрезы
Концентрат водосмешиваемой смазочно-охлаждающей жидкости
Концентрат водосмешиваемой смазочно-охлаждающей жидкости
Концентрат водосмешиваемой смазочно-охлаждающей жидкости
Система термостатирования батарейного модуля и инвертора гибридного автомобиля
Крестовина дифференциала транспортного средства
Муфта блокировки дифференциала
Коробка передач с двухрядным планетарным демультипликатором
Демультипликатор коробки передач трансмиссии внедорожника

