Результат интеллектуальной деятельности: СПОСОБ НАХОЖДЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ОБЪЕКТОВ В ПАССИВНЫХ СИСТЕМАХ ВИДЕНИЯ
Вид РИД
Изобретение
Изобретение относится к пассивным системам пространственного видения оптического, инфракрасного и радиотехнического диапазонов длин волн, предназначенным для наблюдения за объектами. Система состоит из нескольких стереопар приемников, принимающих сигналы излучения или отражения от нескольких объектов наблюдения в определенном диапазоне длин волн. Приемники взаимно ориентированы в пространстве.
Объекты наблюдения - точечные (малоразмерные) или протяженные объекты, которые неподвижны или движутся в пространстве. Результатом наблюдения за объектами в отдельном приемнике являются орты векторов направлений на объекты (направляющие векторы). При наблюдении за несколькими объектами заранее неизвестна принадлежность ортов тем или иным объектам. Возникает необходимость нахождения сопряженных пар векторов направлений на соответствующие объекты с целью вычисления пространственных координат точечных объектов или центров протяженных.
Известны способы нахождения сопряженных векторов на основе достаточного условия сопряжения - линейной зависимости нескольких векторов - при определении дальностей до объектов [1], взаимной ориентации систем координат приемников [2], траекторном сопровождении движущихся объектов [3]. Однако данные способы при выборе сопряженных пар векторов не учитывают правильного взаимного расположения приемников, а также мощности сигналов излучения или отражения от объектов, измеряемой амплитудой принятых сигналов при их первичной обработке.
Рассмотрим в качестве прототипа способ определения дальностей до объектов в пассивных системах видения [1], который сводится к следующему.
1. Размещают в пространстве двух взаимно удаленных приемников, контролирующих m объектов при известной матрице Pk поворота осей k-го приемника (k = 2) и базовом векторе bk, соединяющем центры координат.
2. Определяют орты a1 (i1,) векторов i1-x направлений на объекты (центры протяженных объектов) первого приемника и орты ak (ik) векторов ik-х направлений k-го приемника 
4. Для всех m2 пар ортов а1(i1) и ak(ik), поставленных в соответствие друг другу, находят оценки  дальностей r1(i) и rk(ik) по критерию минимума квадрата евклидовой нормы вектора ek ошибок сопряжения
дальностей r1(i) и rk(ik) по критерию минимума квадрата евклидовой нормы вектора ek ошибок сопряжения 

5. Из m2 пар ортов последовательно выбирают m неповторяющихся пар a1(i1s) и ak(iks),  с наименьшими значениями показателей Jk. При этом получают оценки (1) дальностей
с наименьшими значениями показателей Jk. При этом получают оценки (1) дальностей  и
и  ,
,  , соответствующие данным показателям.
, соответствующие данным показателям.
6. На основе оценок  и
и  вычисляют оценки пространственных координат m объектов в системах координат приемников:
вычисляют оценки пространственных координат m объектов в системах координат приемников:

Данный способ обладает следующими недостатками.
1. Способ не учитывает возможностей увеличения числа приемников и их правильного взаимного расположения при выборе направляющих векторов.
2. Способ не учитывает дополнительной информации об амплитудах сигналов, принятых в направлениях на объекты.
Предлагаемое техническое решение направлено на устранение этих недостатков, а именно на увеличение числа приемников, их правильное взаимное расположение и учет амплитуд принятых сигналов, приводящих к повышению точности оценок пространственных координат объектов.
Технический результат предлагаемого технического решения достигается применением способа нахождения пространственных координат объектов в пассивных системах видения, который заключается в расположении первого и k-го приемника, взаимно ориентированных матрицей Pk поворота осей и базовым вектором bk k-го приемника по отношению к первому, определении ортов а1(i1) векторов i1-x направлений на объекты ( , m - число объектов) в первом приемнике и ортов ak (ik) векторов ik-х направлений на объекты
, m - число объектов) в первом приемнике и ортов ak (ik) векторов ik-х направлений на объекты  в k-м приемнике, последовательном выборе m неповторяющихся вариантов соединения пар ортов a1(i) и ak(ik) с наименьшими значениями показателей сопряжения векторов Jk=||r1(i1)a1(i1) - rk(ik)Pkak(ik) - bk||2 и дальностями r1(i), rk(ik) до объектов, вычисленными по критерию минимума этих показателей, отличающийся тем, что увеличивают число n приемников до n = 3 или n = 4, располагают приемники на окружности или сфере с ортогональным расположением линий визирования k-х приемников по отношению к первому приемнику, затем перебором mn вариантов соединения ортов а1(i1), ak(ik),
в k-м приемнике, последовательном выборе m неповторяющихся вариантов соединения пар ортов a1(i) и ak(ik) с наименьшими значениями показателей сопряжения векторов Jk=||r1(i1)a1(i1) - rk(ik)Pkak(ik) - bk||2 и дальностями r1(i), rk(ik) до объектов, вычисленными по критерию минимума этих показателей, отличающийся тем, что увеличивают число n приемников до n = 3 или n = 4, располагают приемники на окружности или сфере с ортогональным расположением линий визирования k-х приемников по отношению к первому приемнику, затем перебором mn вариантов соединения ортов а1(i1), ak(ik),  , вычисляют оценки дальностей до объектов r1(i), rk(ik),
, вычисляют оценки дальностей до объектов r1(i), rk(ik),  , по критерию минимума показателя
, по критерию минимума показателя  , далее последовательно выбирают m неповторяющихся вариантов соединения ортов a1(i1s), ak(iks),
, далее последовательно выбирают m неповторяющихся вариантов соединения ортов a1(i1s), ak(iks),  ,
,  , с наименьшими суммарными показателями J = μ1J + μ2J*, μ1 > 0, μ2 > 0, μ1 + μ2 = 1,
, с наименьшими суммарными показателями J = μ1J + μ2J*, μ1 > 0, μ2 > 0, μ1 + μ2 = 1,  , где u1(i1), uk(ik) - амплитуды сигналов, принятых с направлений а1(i1), ak(ik), и для выбранных вариантов вычисляют пространственные координаты объектов Ml(s) = r1(i1s)а1(i1s),
, где u1(i1), uk(ik) - амплитуды сигналов, принятых с направлений а1(i1), ak(ik), и для выбранных вариантов вычисляют пространственные координаты объектов Ml(s) = r1(i1s)а1(i1s),  , в системе координат первого приемника.
, в системе координат первого приемника.
Алгоритмически способ сводится к следующим операциям.
1. Располагают n приемников (n>2) на окружности или сфере с ортогональным расположением линий визирования k-х приемников  по отношению к первому, ориентированных матрицей Pk поворота осей k-х приемников и базовым вектором bk, соединяющим центры систем координат первого и k-го приемников.
по отношению к первому, ориентированных матрицей Pk поворота осей k-х приемников и базовым вектором bk, соединяющим центры систем координат первого и k-го приемников.
2. Осуществляется перебор mn вариантов соединения ортов а1(i1), ak(ik),  i1, i2, …, in ∈ {1,2, …, m}. Для каждого варианта вычисляются оценки дальностей до объектов r1(i), rk(ik),
i1, i2, …, in ∈ {1,2, …, m}. Для каждого варианта вычисляются оценки дальностей до объектов r1(i), rk(ik),  по критерию минимума квадратичного показателя
по критерию минимума квадратичного показателя

где ek - вектор ошибок сопряжения векторов М1(i1) = r1(i1)а1(i1) и Mk(ik) = rk(ik)Pkak(ik), взятых в системе координат 1-го приемника; Т - символ транспонирования. Из необходимого условия минимума (2):

получается система n уравнений, которая в матричной форме имеет вид:
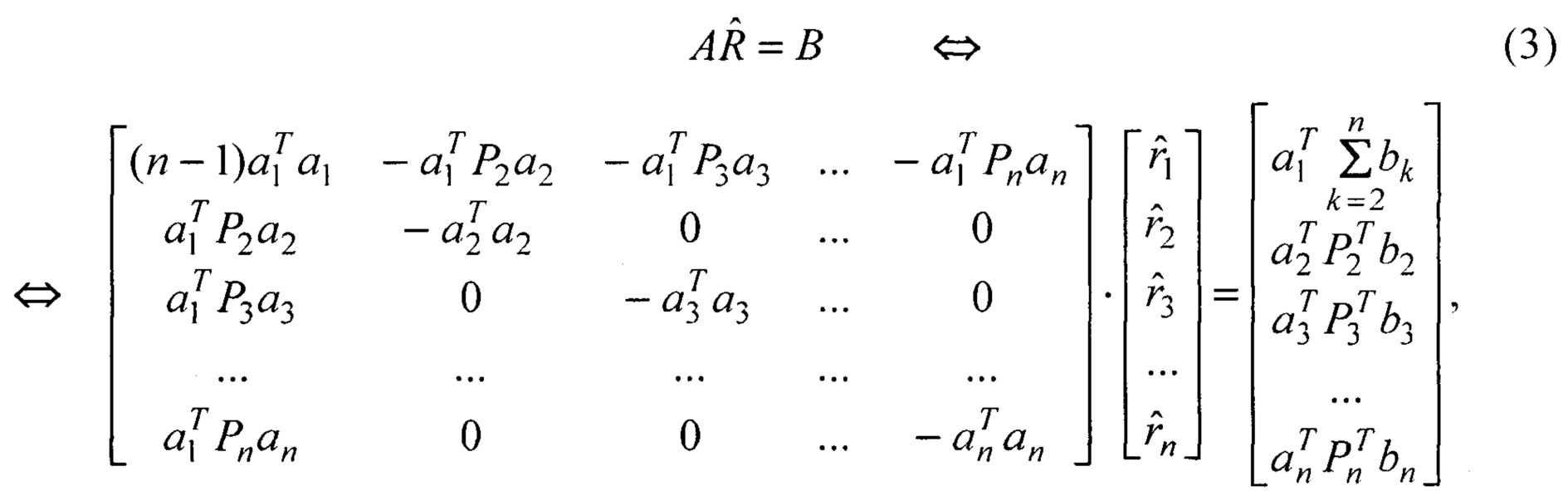
где учтены ортогональность матрицы  , I - единичная матрица, и равенство
, I - единичная матрица, и равенство 
Из (3) с помощью обратной матрицы находится вектор оценок дальностей

3. Последовательно выбираются m неповторяющихся вариантов соединения ортов а1(i1s), ak(iks),  с наименьшими суммарными показателями
с наименьшими суммарными показателями

где J получается из (2) подстановкой вместо r1, rk их оценок  , найденных по формуле (4); u1(i1), uk(ik) - амплитуды сигналов, принятых с направлений a1(i1), ak(ik); μ1 > 0, μ2 > 0 - весовые коэффициенты (μ1 + μ2 = 1).
, найденных по формуле (4); u1(i1), uk(ik) - амплитуды сигналов, принятых с направлений a1(i1), ak(ik); μ1 > 0, μ2 > 0 - весовые коэффициенты (μ1 + μ2 = 1).
4. Для выбранных вариантов вычисляются пространственные координаты объектов М1(s)=r1(i1s)a1(i1s),  , в системе первого приемника.
, в системе первого приемника.
Расчет точности оценок
Эффект от увеличения числа приемников (n > 2) аналитически рассчитывался с помощью ковариационной матрицы ошибок оценок дальностей (4). При наличии трех приемников (n = 3) и ортогональности векторов а1 и а2, а1 и а3 СКО ошибки оценивания уменьшается в 2 раза. При наличии четырех приемников (n=3) и ортогональности векторов a1 и а2, a1 и a3, а1 и а4 СКО ошибки оценивания уменьшается в 3 раза.
Методом компьютерного моделирования исследовалось влияние учета амплитуд на точность оценок координат m объектов в системе двух приемников (n = 2). Для m = 3, 4 и 5 точечных объектов пространственные координаты х, у, z векторов М1(i),  в системе координат 1-го приемника выбирались в пределах 5-25 м. Координаты х, у, z векторов 2-го приемника пересчитывались с учетом матрицы Р поворота осей и базового вектора b = (10, 20, 30)Т:М2(i) = PTM1(i) - b,
в системе координат 1-го приемника выбирались в пределах 5-25 м. Координаты х, у, z векторов 2-го приемника пересчитывались с учетом матрицы Р поворота осей и базового вектора b = (10, 20, 30)Т:М2(i) = PTM1(i) - b,  , и искажались действием нормального шума с нулевым средним и СКО σх = σy = σz = 0,1 м. Тем самым моделировались ошибки измерения координат ортов a2(i) = (1/r2(i))М2(i), r2(i) = ||М2(i)||. Система координат 2-го приемника была повернута относительно 1-го на углы α = 7°, β = 3° и γ = 5°, которые искажались нормальным шумом с нулевым средним и СКО σα = σβ = σγ = 0,1°.
, и искажались действием нормального шума с нулевым средним и СКО σх = σy = σz = 0,1 м. Тем самым моделировались ошибки измерения координат ортов a2(i) = (1/r2(i))М2(i), r2(i) = ||М2(i)||. Система координат 2-го приемника была повернута относительно 1-го на углы α = 7°, β = 3° и γ = 5°, которые искажались нормальным шумом с нулевым средним и СКО σα = σβ = σγ = 0,1°.
Амплитуды u(i),  , i-х объектов последовательно назначались от 5 до 9 с шагом 1 в условных единицах и искажались действием нормального шума с нулевым средним и СКО σu = 0,3.
, i-х объектов последовательно назначались от 5 до 9 с шагом 1 в условных единицах и искажались действием нормального шума с нулевым средним и СКО σu = 0,3.
На множестве N = 1000 реализаций опыта вычислялись следующие характеристики: dcp - расстояние d между моделируемым и найденным пространственными положениями объекта (модуль разности векторов), усредненное по числу реализаций опыта N и числу объектов n; σd - выборочное СКО случайной величины d. Показатель формулы (5) вычислялся с учетом амплитуд с коэффициентами μ1 = 0,5, μ2 = 0,5 и без учета амплитуд с μ1 = 1, μ2 = 0. В таблице представлены характеристики, полученные для двух режимов работы: с учетом амплитуд объектов и без учета амплитуд.
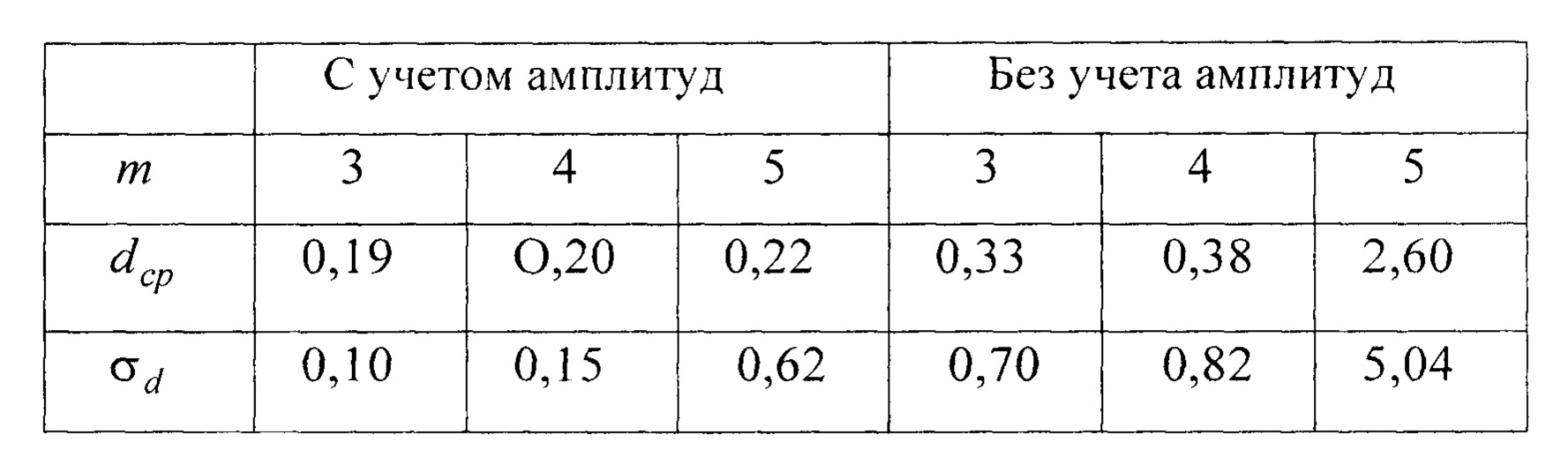
Таким образом, предложенный способ позволяет увеличить вероятность правильного распределения направляющих векторов по принадлежности объектам за счет увеличения числа приемников и использования информации об амплитудах сигналов от объектов, что приводит к снижению в несколько раз СКО ошибок оценок пространственного положения объектов.
Литература
1. Патент RU 2681518.
2. Патент RU 2682382.
3. Патент RU 2694023.

Бинарный космический аппарат для поиска и сбора внеземных нанообъектов с магнитными свойствами в окрестностях точек либрации
Способ обнаружения движущихся объектов системой доплеровских приемников
Фильтр режектирования помех
Фильтр подавления помех
Фильтр для подавления помех
Фильтр режекции помех
Бинарный космический аппарат для поиска и сбора внеземных объектов со свойствами квантовых точек в окрестностях точек либрации
Способ наблюдения за движущимися объектами многопозиционной системой приемников
Способ повышения надежности и точности пассивной системы видения
Способ взаимной ориентации систем координат и определения дальностей до объектов в пассивной системе радиовидения
Способ нахождения сопряженных векторов направлений на движущиеся объекты
Способ определения пространственного положения, скорости и ускорения объекта в пассивной сканирующей системе видения
Способ двухэтапного восстановления радиотепловых изображений
Способ формирования радиотеплового изображения объектов
Способ определения пространственных координат движущегося объекта пассивной радиосистемой
Способ определения пространственного положения и скорости в группе объектов системой доплеровских приемников
Способ определения пространственных координат и скоростей объектов сканирующей многопозиционной радиосистемой
Способ обнаружения движущихся объектов системой доплеровских приемников

