Результат интеллектуальной деятельности: СИСТЕМА НАВИГАЦИИ АВТОМОБИЛЬНОГО ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ ЗОНЫ ПАРКОВКИ С ИСПОЛЬЗОВАНИЕМ МАЛОМОЩНЫХ РАДИОСТАНЦИЙ И СПОСОБ ОСУЩЕСТВЛЕНИЯ ТАКОЙ НАВИГАЦИИ
Вид РИД
Изобретение
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Не применимо.
ПРЕДПИСАНИЕ КАСАТЕЛЬНО ФИНАНСИРУЕМЫХ ФЕДЕРАЛЬНЫМ ПРАВИТЕЛЬСТВОМ НАУЧНЫХ ИССЛЕДОВАНИЙ
Не применимо.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Настоящее изобретение, в целом, относится к информационно-развлекательным системам автомобильного транспортного средства, а конкретнее, к информационно-развлекательной системе автомобильного транспортного средства для навигации транспортного средства с использованием маломощных радиостанций.
Информационно-развлекательные системы, которые содействуют водителю транспортного средства при навигации в пункт назначения, широко известны и типично используют глобальную навигационную спутниковую систему (GNSS), такую как глобальная система определения местоположения (GPS). Такие информационно-развлекательные системы могут использовать приложение или программу навигации, которая встроена в транспортное средство или предусмотрена в портативном карманном устройстве. Когда пунктом назначения является автостоянка, водитель транспортного средства типично не знает, есть ли доступное место парковки на автостоянке. Это в особенности справедливо, если автостоянка почти заполнена или же переполнена. Даже когда на автостоянке есть доступное место парковки, водитель может расходовать лишнее топливо и время, отыскивая доступное место парковки. Также было бы желательно эффективнее идентифицировать доступное место парковки, сообщать о доступном месте парковки транспортному средству и направлять транспортное средство на доступное место парковки.
Сущность изобретения
Это изобретение включает в себя систему навигации для зоны парковки. Зона парковки содержит множество мест парковки и множество точек траектории движения. Точки траектории движения размещены в массиве точек траектории движения по зоне парковки. Каждая из точек траектории движения содержит значение идентификатора для расположения в зоне парковки. Система навигации применяет множество узлов зоны парковки и сервер содействия парковке.
Узлы зоны парковки размещены в массиве узлов по зоне парковки. Каждый из узлов содержит камеру и маломощную радиостанцию. Каждая из маломощных радиостанций передает уникальный радиосигнал.
Сервер содействия парковке находится на беспроводной связи с узлами. Сервер анализирует изображения, захваченные камерами, принимает запрос парковки от пользователя, в ответ на запрос, отправляет пользователю предложенное место парковки и выдает последовательность прибытия транспортного средства по точкам траектории движения. Изображения содержат зону парковки и анализируются для обнаружения состояния доступности мест парковки. Состояние доступности бывает занятым или незанятым. Предложенное место парковки предлагается, в ответ на запрос парковки, из мест парковки, имеющих незанятое состояние доступности.
Последовательность прибытия является последовательностью точек траектории движения, которая ведет от въезда на парковку зоны парковки до предложенного места парковки. Каждая из точек траектории движения, в том числе, точек траектории движения в последовательности прибытия транспортного средства, дополнительно содержит значение интенсивности сигнала для интенсивности радиосигналов в расположении точки траектории движения и значение времени прохождения для относительной временной привязки радиосигналов в расположении точки траектории движения. Сервер передает последовательность прибытия транспортного средства на транспортное средство. Радиочастотная триангуляция или навигационное счисление пути используется для навигации транспортного средства между точками траектории движения последовательности прибытия транспортного средства.
Система навигации дополнительно может содержать сотовое устройство, такое как смартфон. Запрос парковки вводится пользователем на сотовом устройстве. Сотовое устройство передает запрос на сервер и принимает с сервера последовательность прибытия транспортного средства.
Сервер также может выдавать последовательность пешего прибытия по точкам траектории движения, ведущую с предложенного места парковки в пеший пункт назначения. Узел пешего пункта назначения расположен на пешеходном входе пешего пункта назначения и имеет маломощную радиостанцию пункта назначения, передающую радиосигнал пункта назначения. Последовательность пешего прибытия заканчивается точкой траектории движения пешего пункта назначения. Точка траектории движения пешего пункта назначения находится на пешеходном входе и содержит идентификатор входа пункта назначения, значение интенсивности сигнала пункта назначения для интенсивности радиосигналов и сигнала пункта назначения на входе, и значение времени прохождения пункта назначения для относительной временной привязки радиосигналов и радиосигнала пункта назначения на входе.
В качестве альтернативы, последовательность прибытия может выдаваться на транспортное средство с информационно-развлекательной системой, но без признака или функции навигации. В таких случаях последовательность прибытия может выдаваться с сервера содействия парковке в программу или приложение на смартфоне пользователя. Приложение может применять узлы зоны парковки и сервер содействия парковке и передавать последовательность прибытия в информационно-развлекательную систему через модуль усовершенствованного интерфейса периферийных устройств (APIM) информационно-развлекательной системы. Информационно-развлекательная система затем отображает последовательность прибытия пользователю.
В качестве альтернативы, что касается транспортного средства без признака навигации, приложение на смартфоне может сообщать о доступности парковки пользователю. В таких случаях, приложение может сообщать пользователю о доступности ряда автостоянки и выдавать идентификатор ряда парковки и/или места парковки, такого как номер ряда и места парковки. Доступность и идентификатор ряда автостоянки могут отображаться пользователю на информационно-развлекательной системе через APIM.
Согласно одному варианту осуществления настоящего изобретения обеспечена система навигации для зоны парковки, содержащей множество мест парковки и множество точек траектории движения, размещенных в массиве точек траектории движения по зоне парковки, каждая точка траектории движения содержит значение идентификатора для расположения в зоне парковки, причем система содержит: множество узлов зоны парковки, размещенных в массиве узлов по зоне парковки, причем каждый узел содержит: камеру; и маломощную радиостанцию, передающую уникальный радиосигнал; и сервер содействия парковке на связи с узлами, при этом, сервер: анализирует изображения зоны парковки, захваченные камерами, для обнаружения состояния доступности мест парковки, причем состояние доступности бывает занятым или незанятым; принимает запрос парковки от пользователя; в ответ на запрос, отправляет пользователю предложенное место парковки из мест парковки, имеющих незанятое состояние доступности; и выдает последовательность прибытия транспортного средства по точкам траектории движения, ведущую от въезда на парковку зоны парковки до предложенного места парковки, при этом, каждая из точек траектории движения дополнительно содержит значение интенсивности сигнала для интенсивности радиосигналов в расположении точки траектории движения и значение времени прохождения для относительной временной привязки радиосигналов в расположении точки траектории движения.
Согласно дополнительному варианту осуществления обеспечена система, дополнительно содержащая сотовое устройство, при этом, каждый из запроса парковки и пешего пункта назначения вводится на и передается на сервер посредством сотового устройства.
Согласно дополнительному варианту осуществления обеспечена система, дополнительно содержащая транспортное средство, в котором сотовое устройство встроено в транспортное средство.
Согласно дополнительному варианту осуществления обеспечена система, дополнительно содержащая сотовое устройство, при этом последовательность прибытия транспортного средства принимается сотовым устройством.
Согласно дополнительному варианту осуществления обеспечена система, в которой сервер передает последовательность прибытия транспортного средства на транспортное средство, и радиочастотная триангуляция используется для навигации транспортного средства между точками траектории движения последовательности прибытия транспортного средства.
Согласно дополнительному варианту осуществления обеспечена система, в которой сервер передает последовательность прибытия транспортного средства на транспортное средство, и навигационное счисление пути используется для навигации транспортного средства между точками траектории движения последовательности прибытия транспортного средства.
Согласно дополнительному варианту осуществления обеспечена система, в которой водитель выбирает зону парковки.
Согласно дополнительному варианту осуществления обеспечена система, в которой сервер предлагает предложенное место парковки для минимизации пешего расстояния от предложенного места парковки до пешего пункта назначения.
Согласно дополнительному варианту осуществления обеспечена система, в которой сервер выдает последовательность пешего прибытия по точкам траектории движения, ведущую с предложенного места парковки в пеший пункт назначения.
Согласно дополнительному варианту осуществления обеспечена система, дополнительно содержащая узел пешего пункта назначения, содержащий маломощную радиостанцию пункта назначения, передающую радиосигнал пункта назначения, при этом, узел пешего пункта назначения расположен на пешеходном входе пешего пункта назначения; и точку траектории движения пешего пункта назначения на входе, содержащую значение идентификатора входа пункта назначения; значение интенсивности сигнала пункта назначения для интенсивности радиосигналов и радиосигнала пункта назначения на входе; и значение времени прохождения пункта назначения для относительной временной привязки радиосигналов и радиосигнала пункта назначения на входе, при этом, последовательность пешего прибытия заканчивается точкой траектории движения пешего пункта назначения.
Согласно дополнительному варианту осуществления обеспечена система, в которой сервер выдает последовательность пешего отбытия по точкам траектории движения, ведущую от пешего пункта назначения до предложенного места парковки.
Согласно дополнительному варианту осуществления обеспечена система, в которой сервер выдает последовательность пешего отбытия, обращая порядок точек траектории движения в последовательности пешего прибытия.
Согласно дополнительному варианту осуществления обеспечена система, дополнительно содержащая сотовое устройство; последовательность пешего отбытия по точкам траектории движения, ведущую от пешего пункта назначения до предложенного места парковки, при этом, сотовое устройство выдает последовательность пешего отбытия, обращая порядок точек траектории движения в последовательности пешего прибытия.
Согласно дополнительному варианту осуществления обеспечена система, в которой сервер выдает последовательность отбытия транспортного средства по точкам траектории движения, ведущую от предложенного места парковки до выезда с парковки зоны парковки.
Согласно дополнительному варианту осуществления обеспечена система, дополнительно содержащая сотовое устройство, при этом сотовое устройство передает на сервер время прибытия транспортного средства при выключении зажигания транспортного средства, которое проследовало последовательностью прибытия транспортного средства на предложенное место парковки, причем сотовое устройство передает на сервер время отбытия транспортного средства при последующем включении зажигания и отбытии транспортного средства с предложенного места парковки, и при этом сервер рассчитывает длительность занятости предложенного места парковки транспортным средством.
Согласно дополнительному варианту осуществления обеспечена система, в которой, для каждого из узлов, радиостанция передает на сервер изображения, захваченные камерой.
Согласно дополнительному варианту осуществления обеспечена система, в которой сервер хранит состояние доступности в базе данных.
Согласно другому варианту осуществления настоящего изобретения обеспечена система навигации для зоны парковки, причем система содержит: множество узлов, причем каждый узел содержит: камеру, захватывающую изображения зоны; маломощную радиостанцию, передающую радиосигнал; сервер, осуществляющий связь с узлами, при этом, сервер анализирует изображения, чтобы предлагать место парковки; выдает последовательность прибытия по точкам траектории движения на место парковки, причем каждая из точек траектории движения содержит значения интенсивности и время прохождения радиосигналов.
Согласно дополнительному варианту осуществления обеспечена система, в которой сервер передает последовательность прибытия на транспортное средство, и радиочастотная триангуляция используется для навигации транспортного средства между точками траектории движения последовательности прибытия.
Согласно дополнительному варианту осуществления обеспечена система, в которой сервер передает последовательность прибытия на транспортное средство, и навигационное счисление пути используется для навигации транспортного средства между точками траектории движения последовательности прибытия.
Согласно другому варианту осуществления настоящего изобретения обеспечен способ осуществления навигации в зоне парковки, содержащей множество узлов зоны парковки, размещенных в массиве узлов по зоне парковки, каждый из узлов содержит камеру и маломощную радиостанцию, передающую радиосигнал, и множество точек траектории движения, размещенных в массиве точек траектории движения по зоне парковки, причем каждая точка траектории движения содержит значения интенсивности и относительной временной привязки радиосигналов, причем способ состоит в том, что: захватывают изображения зоны парковки с использованием множества камер; передают изображения на сервер содействия парковке; анализируют изображения для обнаружения состояния доступности множества мест парковки в зоне парковки, причем состояние доступности бывает занятым или незанятым; принимают запрос парковки; предлагают, в ответ на запрос, предложенное место парковки из мест парковки, имеющих незанятое состояние доступности; и передают с сервера последовательность прибытия транспортного средства по точкам траектории движения до предложенного места парковки.
Согласно дополнительному варианту осуществления обеспечен способ, дополнительно содержащий этапы, на которых: вводят запрос на сотовом устройстве; передают запрос с сотового устройства на сервер; принимают, на сотовом устройстве с сервера, последовательность прибытия транспортного средства.
Согласно дополнительному варианту осуществления обеспечен способ, дополнительно содержащий этапы, на которых: осуществляют навигацию транспортного средства между точками траектории движения последовательности прибытия с использованием радиочастотной триангуляции, при этом, сервер передает последовательность прибытия на транспортное средство.
Согласно дополнительному варианту осуществления обеспечен способ, дополнительно содержащий этапы, на которых: осуществляют навигацию транспортного средства между точками траектории движения последовательности прибытия с использованием навигационного счисления пути, при этом, сервер передает последовательность прибытия на транспортное средство.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
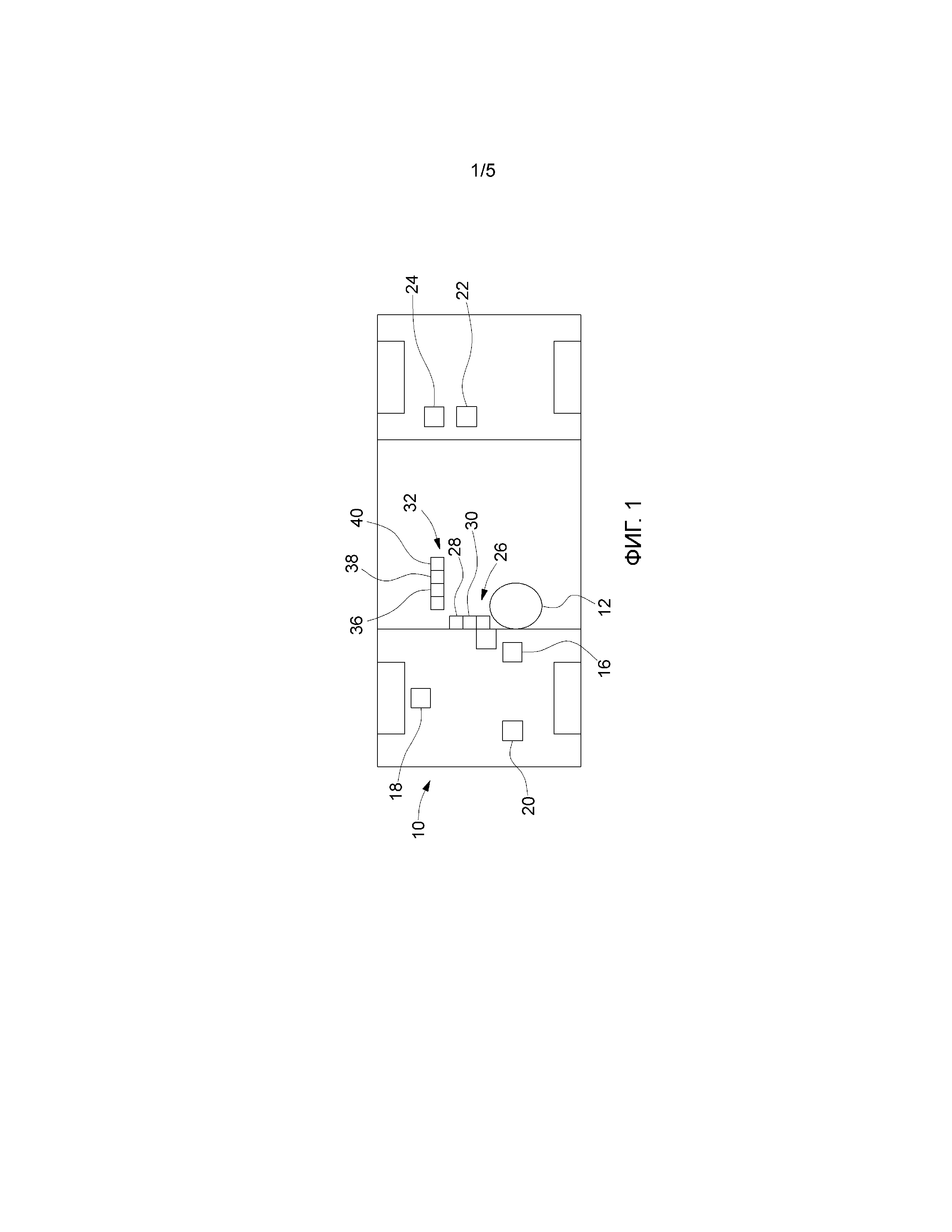
Фиг. 1 - схематический вид автомобильного транспортного средства, имеющего в распоряжении навигацию транспортного средства согласно настоящему изобретению.
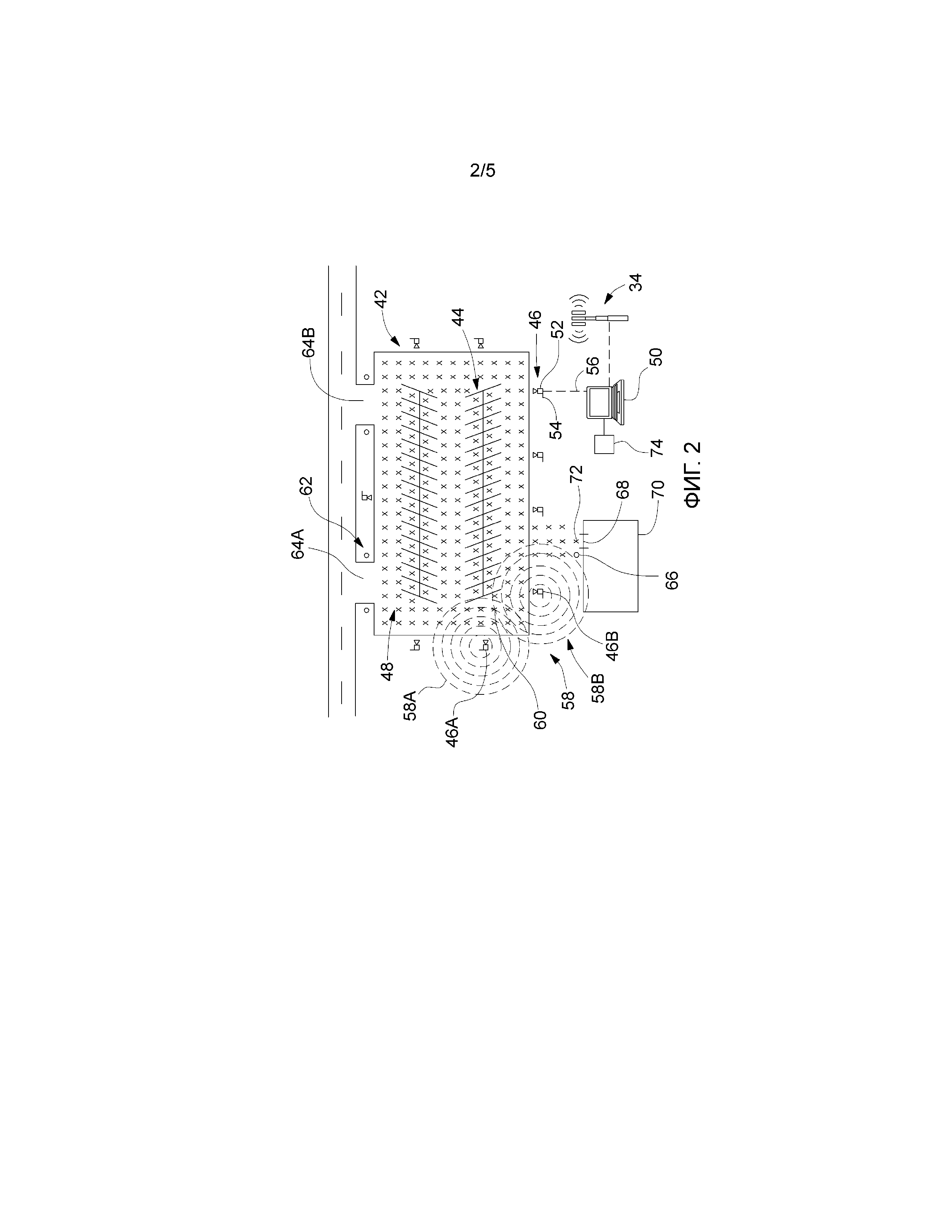
Фиг. 2 - схематический вид зоны парковки для использования с навигацией транспортного средства согласно настоящему изобретению.
Фиг. 3 - схематический вид зоны парковки, и показывающий работу навигации транспортного средства согласно настоящему изобретению.
Фиг. 4A и 4B - блок-схема последовательности операций способа, показывающая работу системы навигации.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
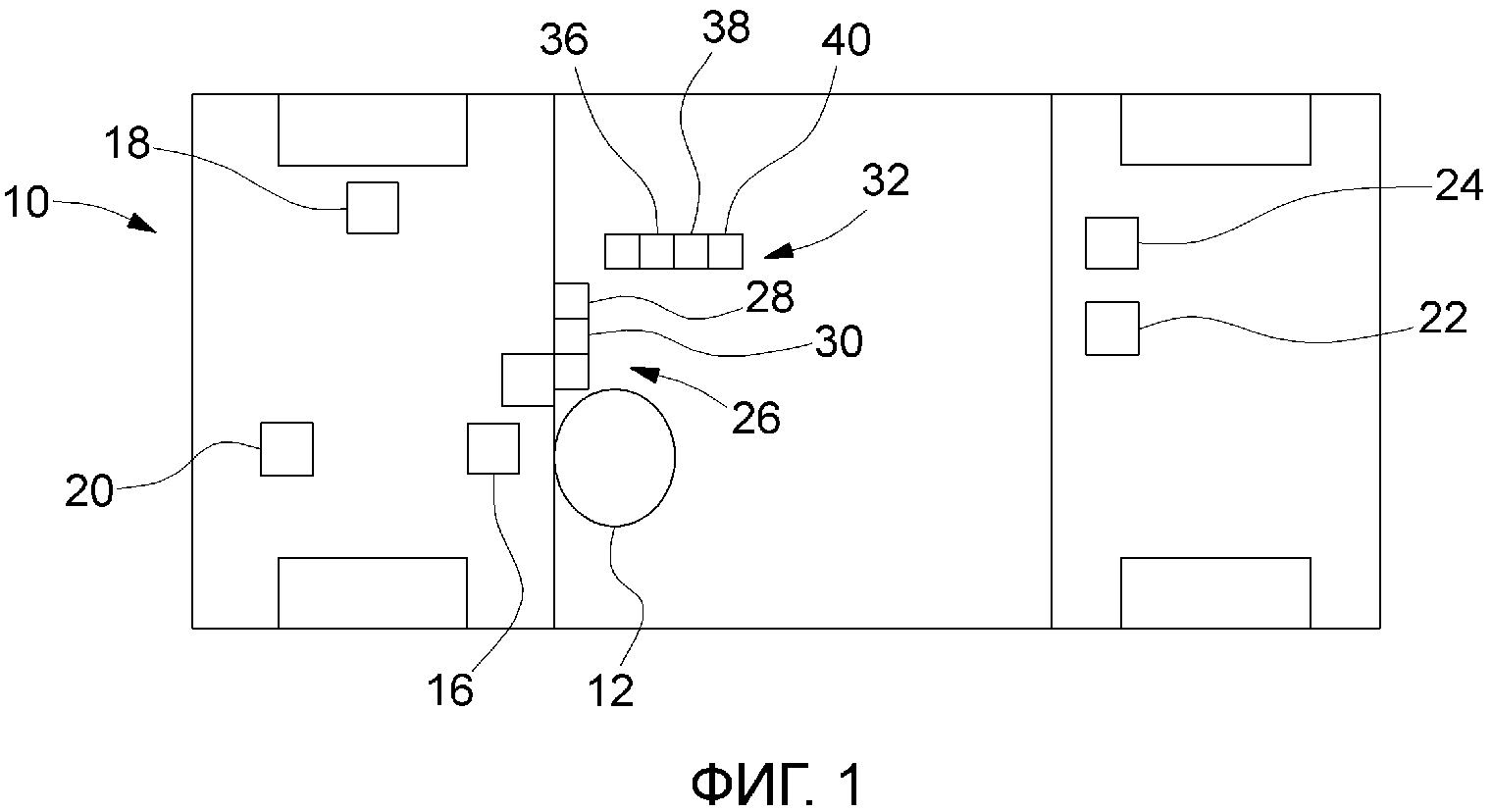
Далее, со ссылкой на фиг. 1 схематически проиллюстрировано автомобильное транспортное средство, в целом указанное под 10, имеющее рулевое колесо 12 и замок 14 зажигания, датчик 16 поворота рулевого колеса, датчик 18 положения колес, акселерометр 20, магнитометр 22 и устройство 24 определения местонахождения. Устройство 24 определения местонахождения принимает сигналы, переданные со спутников глобальной навигационной спутниковой системы (GNSS). Транспортное средство 10 также включает в себя систему и интерфейс связи транспортного средства, указанные в целом под 26, обычно известные как информационно-развлекательная система. Система 26 связи включает в себя модуль 28 усовершенствованного интерфейса периферийных устройств (APIM) и модуль 30 навигации. Модуль 30 навигации использует датчик 16 поворота рулевого колеса, датчик 18 положения колес, акселерометр 20, магнитометр 22 и/или устройство 20 определения местонахождения для предоставления информации о местоположении для водителя транспортного средства 10.
Также на фиг. 1 проиллюстрировано сотовое устройство, в целом указанное под 32, которое находится на связи с сотовой сетью связи, в целом указанной под 34 (проиллюстрированной на фиг. 2). Сотовое устройство 32 включает в себя маломощный цифровой радиочастотный (LPR) приемник 36, сотовую радиостанцию 38 и приемник 40 GNSS устройства. Приемник 36 LPR может быть радиостанцией Bluetooth с малым потреблением энергии (BLE), радиостанцией ZigBee, беспроводной радиостанцией ANT, радиостанцией сверхширокополосной связи, радиостанцией WiFi, или тому подобным. Сотовая радиостанция 38 осуществляет связь с сотовой сетью 34.
Сотовое устройство 32 может присоединяться к APIM 28 через соединение WiFi, Bluetooth или универсальную последовательную шину (USB), чтобы принимать сигналы или данные с транспортного средства 10. Например, сотовое устройство 32 может принимать сигналы GNSS с устройства 24 определения местонахождения транспортного средства 10. Типично, устройство 24 определения местонахождения имеет большую частоту определения положения и большую точность, чем приемник 40 GNSS устройства. Сотовое устройство также может принимать сигналы включения и выключения зажигания. Сотовое устройство 32 принимает входные сигналы, например, с использованием речевых команд, экрана касания, элементов управления на рулевом колесе или жестов.
Сотовое устройство 32 может быть автономным блоком, таким как смартфон или сотовый телефон водителя транспортного средства, и присоединено к системе 26 связи через APIM 28. В качестве альтернативы, сотовое устройство 32 может быть включено в состав в виде части или встроено в систему 26 связи. APIM 28 предоставляет сотовому устройству 32 возможность управляться системой 26 связи, и наоборот, а также данным, выработанным или принятым сотовым устройством 32, возможность передаваться между или отображаться на системе 26 связи, и наоборот.
Данные могут передаваться в и из системы 26 связи через сотовое устройство 32 с использованием APIM 28. В качестве альтернативы, данные могут передаваться в и из системы 26 связи через сеть WiFi или другую беспроводную компьютерную сеть. Например, сеть WiFi может быть персональной домашней сетью или сетью общего пользования в магазине или другом общественном месте. Сотовое устройство 32 может осуществлять связь с сетью WiFi и, в более широком смысле, системой 26 связи - через сотовую сеть 34. В качестве альтернативы, данные могут передаваться в и из системы 26 связи через блок телематического управления, который включает в себя модем сотовой связи. Например, блок телематического управления может включать в себя сотовое устройство, встроенное в систему 26 связи и отдельное от сотового устройства 32. Сотовое устройство 32 может осуществлять связь с блоком телематического управления и, в более широком смысле, системой 26 связи - через сотовую сеть 34.
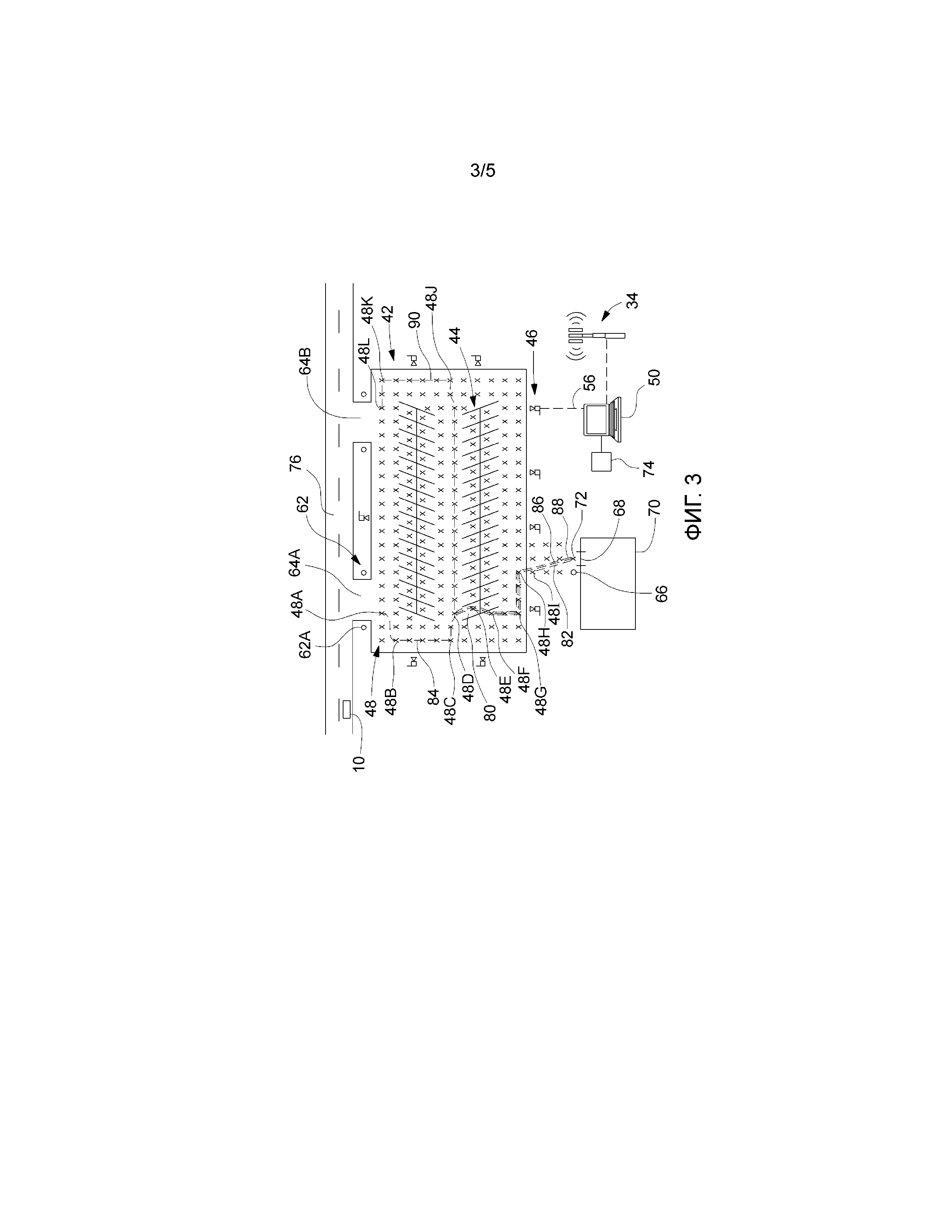
Далее, со ссылкой на фиг. 2, проиллюстрирована зона парковки, в целом указанная под 42, имеющая множество мест парковки, в целом указанных под 44. Зона 42 парковки также включает в себя связанные зоны, прилегающие к местам 44 парковки, таким как пешеходные тротуары или другие подъездные пути. К тому же, проиллюстрировано множество узлов зоны парковки, проиллюстрированных в целом под 46, множество точек траектории движения, в целом проиллюстрированных под 48, и сервер 50 содействия парковке. Как проиллюстрировано, зона 42 парковки является автостоянкой. В качестве альтернативы, зона 42 парковки может быть иной, чем автостоянка. Например, зона 42 парковки может быть крытой автостоянкой или многоуровневой парковкой, уличной парковкой или любым другим определенным набором мест парковки.
Узлы 46 размещены в массиве узлов по зоне 42 парковки. Как проиллюстрировано, узлы 46 размещены вокруг и снаружи периметра зоны 42 парковки. В качестве альтернативы, узлы 46 могут быть размещены иначе, чем по периметру зоны 42 парковки. Например, узлы 46 также могут быть размещены в пределах зоны 42 парковки.
Каждый из узлов 46 содержит камеру 52 и маломощную радиостанцию 54 (LPR). Каждая из камер 52 захватывает изображения зоны 42 парковки. Камеры 52 имеют пригодный тип, известный специалистам в данной области техники. Например, камеры 52 могут быть цифровыми камерами. Каждая из радиостанций 54 передает уникальный радиосигнал, указанный в целом под 58, принимаемый приемником 36 LPR в сотовом устройстве 32. (Для ясности, только два из радиосигналов 58 проиллюстрированы на фиг. 2). Радиостанции 54 могут быть работающими от аккумуляторной батареи. Узлы 46 могут быть установлены на фонарных столбах в пределах или вокруг зоны 42 парковки.
Изображения, захваченные камерами 52, передаются через сеть 56 передачи данных с узлов 46 на сервер 50. Сеть 56 присоединяет все из узлов 46 к серверу 50, хотя, для ясности, сеть 56 проиллюстрирована присоединяющей к серверу 50 только один из узлов 46. Сервер 50 может быть расположен в зоне 42 парковки. В качестве альтернативы, сеть 56 может быть сетью Интернет, а сервер 50 может быть облачным вычислительным ресурсом. Сеть 56 может быть проводной или беспроводной. В качестве альтернативы, сеть 56 может содержать радиостанции 54, передающие изображения на сервер 50.
Точки 48 траектории движения размещены в расположениях в массиве точек траектории движения по зоне 42 парковки. Как проиллюстрировано, массив точек траектории движения не ограничен местами 44 парковки. Каждая из точек 48 траектории движения содержит значение идентификатора для местоположения конкретной точки траектории движения в зоне парковки, значение интенсивности сигнала для интенсивности радиосигналов 58 маломощных радиостанций 54 в расположении точки траектории движения, значение времени прохождения для относительной временной привязки радиосигналов 58 радиостанций 54 в расположении точки траектории движения.
Например, первый узел 46A передает первый радиосигнал, в целом указанный под 58A, а второй узел 46B передает второй радиосигнал, в целом указанный под 58B. Значение идентификатора для типичной точки 60 траектории движения определяет местонахождение типичной точки 60 траектории движения в зоне 42 парковки и является физическим расположением. Например, значение идентификатора может определять местонахождение первой точки траектории движения в декартовой системе координат. Как проиллюстрировано, типичная точка 60 траектории движения принимает первый и второй радиосигналы 58A и 58B, соответственно. Значение интенсивности сигнала для типичной точки 60 траектории движения является интенсивностью первого и второго радиосигналов 58A и 58B, соответственно, в расположении типичной точки 60 траектории движения. Значение времени прохождения для типичной точки 60 траектории движения является относительной временной привязкой первого и второго радиосигналов 58A и 58B, соответственно, в расположении типичной точки 60 траектории движения.
Так как типичная точка 60 траектории движения является типичной для точек 48 траектории движения, обсуждение значения идентификатора, значения интенсивности сигнала и значения времени прохождения для типичной точки 60 траектории движения применяется к каждой из точек 48 траектории движения. Как проиллюстрировано, типичная точка 60 траектории движения принимает два радиосигнала: первый и второй радиосигналы 58A и 58B, соответственно. Однако, другие точки 48 траектории движения могут принимать больше или меньше, чем два радиосигнала.
Узлы 46 включают в себя множество узлов въездов/выездов на/с парковки, в целом указанных под 62, расположенных на первом и втором въездах/выездах 64A и 64B на/с парковки, соответственно. Каждый из первого и второго въездов/выездов 64A и 64B на/с парковки, соответственно, может по отдельности принимать движение транспорта на въезде, движение транспорта на выезде или движение транспорта как на въезде, так и на выезде - то есть, любой из первого и второго въездов/выездов 64A или 64B, соответственно, может быть въездом на парковку, выездом с парковки или тем и другим. Каждый из узлов 62 въезда/выезда на/с парковки содержит маломощную радиостанцию въезда/выезда на/с парковки, передающую радиосигнал въезда/выезда на/с парковки, принимаемый приемником 36 LPR. Узлы 62 въезда/выезда на/с парковки могут не включать в себя камеры.
Узлы 46 включают в себя узел 66 пешего пункта назначения, расположенный на пешеходном входе 68 пешего пункта 70 назначения. Пеший пункт 70 назначения является пунктом назначения водителя транспортного средства 10. Узел 66 пункта назначения содержит маломощную радиостанцию пункта назначения, передающую радиосигнал пункта назначения, принимаемый приемником 36 LPR. Узел 66 пункта назначения может не включать в себя камеру. К тому же, на входе 68 находится точка 72 траектории движения пешего пункта назначения. Точка 72 траектории движения пешего пункта назначения содержит значение идентификатора, значение интенсивности сигнала для интенсивности радиосигналов радиостанций 54 (в том числе, маломощной радиостанции пункта назначения) на входе 68 и значение времени прохождения для относительной временной привязки радиосигналов маломощных радиостанций 54 (в том числе, маломощной радиостанции пункта назначения) на входе 68.
Как обсуждено, изображения, захваченные камерой 52, передаются на сервер 50. С использованием известных способов, сервер 50 анализирует изображения для обнаружения состояния доступности мест 44 парковки. Например, сервер 50 может сравнивать переданные изображения с опорными изображениями зоны 42 парковки, свободной от транспортных средств. Состояние доступности бывает занятым или незанятым. Сервер 50 может хранить состояние доступности в базе 74 данных.
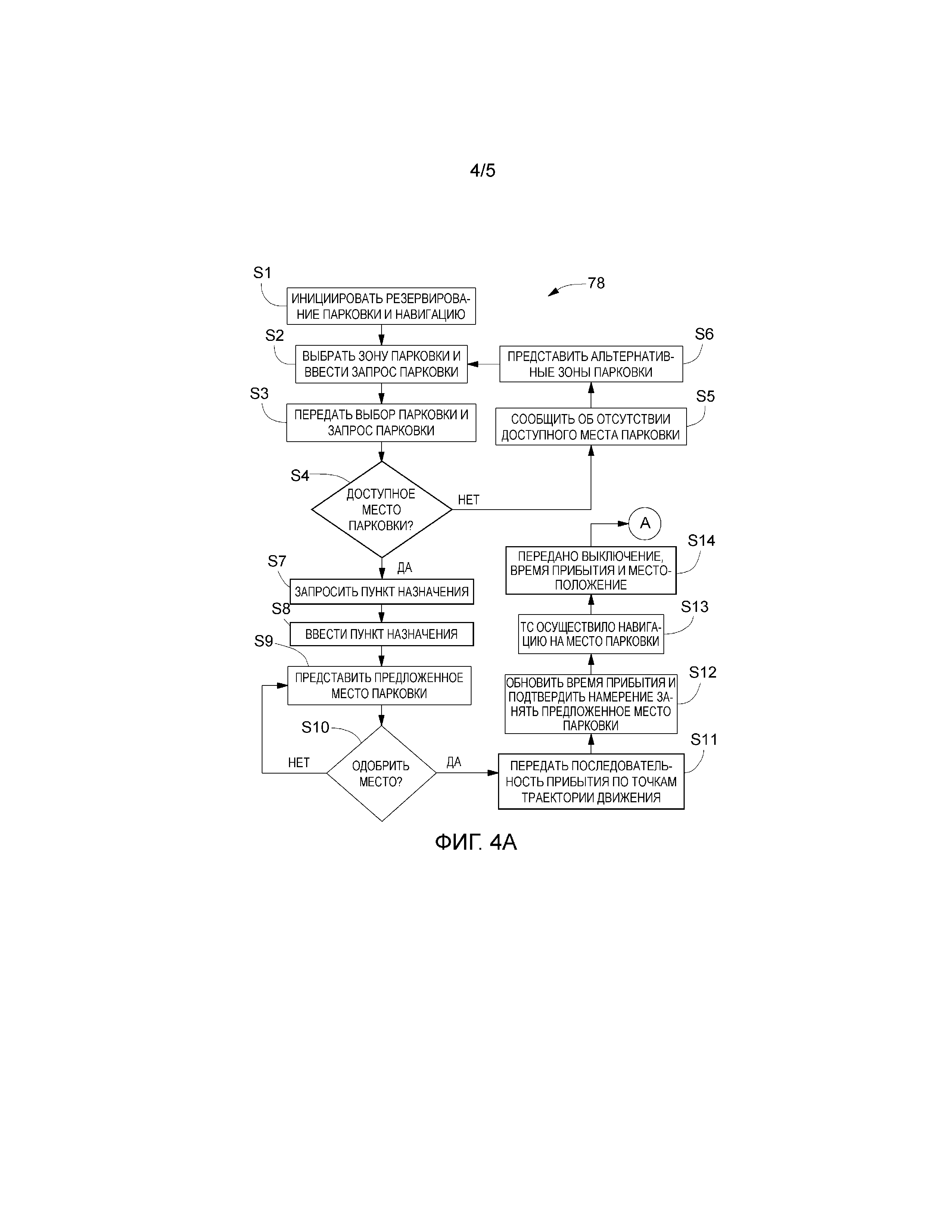
Далее, со ссылкой на фиг. 3-4B, проиллюстрирована навигация транспортного средства 10 по зоне 42 парковки. Транспортное средство 10 движется по дороге 76. Водитель или пользователь инициирует, на этапе S1, программу резервирования и навигации по парковке, указанную в целом под 78, на сотовом устройстве 32. Пользователь может быть пассажиром в транспортном средстве 10. Программа 78, например, может быть приложением на сотовом устройстве 32 или в системе 26 связи. На этапе S2 водитель или пользователь выбирает зону 42 парковки из множества зон парковки, например, отдельных автостоянок или крытых автостоянок возле пункта 70 назначения, а затем, вводит запрос парковки. Выбор и запрос парковки производятся через и с использованием системы 26 связи и, например, могут вводиться с использованием речевых команд, экрана касания, элементов управления на рулевом колесе или жестов. В качестве альтернативы, выбор и запрос парковки могут вводиться на сотовом устройстве 32. На этапе S3 выбор и запрос парковки передаются с сотового устройства 32 через сотовую сеть 34 и принимаются сервером 50. Сотовое устройство 32 и сервер 50 осуществляют связь друг с другом через сотовую сеть 34.
На этапе S4 сервер 50 определяет, имеет ли одно из мест 44 парковки незанятое состояние доступности. Когда все из мест 44 парковки имеют занятое состояние доступности, то есть зона 42 парковки заполнена, тогда на этапе S5 сервер 50 сообщает на сотовое устройство 32, что нет доступного места парковки, а на этапе S6 водителю представляются другие возможные варианты парковки для выбора. Программа 78 затем возвращается на этап S2. Когда по меньшей мере одно из мест 44 парковки имеет незанятое состояние, тогда программа 78 переходит на этап S7.
На этапе S7 сервер 50 запрашивает пеший пункт 70 назначения. Водитель или пользователь, на этапе S8, вводит пеший пункт 70 назначения через сотовое устройство 32 для передачи на сервер 50. По приему пункта 70 назначения, на этапе S9, сервер 50 выбирает предложенное место 80 парковки из мест 44 парковки, имеющих незанятое состояние. Сервер 50 может выбирать предложенное место 80 парковки из мест 44 парковки с использованием алгоритма, который минимизирует пешее расстояние 82 от предложенного места 80 парковки до выхода 68.
При минимизации пешего расстояния 82, сервер 50, например, может учитывать расстояние и безопасность для водителя при пешем переходе в пункт 70 назначения с мест 44 парковки, имеющих незанятое состояние. В качестве альтернативы, сервер 50 может учитывать факторы, иные, чем пешее расстояние 82, при определении предложенного места 80 парковки. Водитель может решать, какие факторы учитывает сервер 50 при выборе предложенного места 80 парковки.
На этапе S9 предложенное место 80 парковки предлагается водителю или пользователю. На этапе S10 водитель решает, следует ли одобрить предложенное место 80 парковки. Когда водитель одобряет предложенное место 80 парковки, предложенное место 80 парковки резервируется, и программа 78 переходит на этап S11. Иначе, программа 78 возвращается на этап S9, и выбирается и предлагается новое предложенное место парковки.
На этапе S11 сервер 50 выдает и передает на сотовое устройство 32 последовательность 84 прибытия транспортного средства по точкам 48 траектории движения. Последовательность 84 прибытия транспортного средства ведет транспортное средство 10 через зону 42 парковки на предложенное место 80 парковки и включает в себя значения идентификатора, интенсивности сигнала и времени прохождения для каждой из точек 48 траектории движения в последовательности 84 прибытия транспортного средства. Когда доступен более чем один маршрут до предложенного места 80 парковки, сервер 50 может учитывать факторы, такие как расстояние, движение транспорта или погода, при определении последовательности 84 прибытия транспортного средства.
Как проиллюстрировано, последовательность 84 прибытия транспортного средства включает в себя первую, вторую, третью, четвертую и пятую точки 48A-48E траектории движения, соответственно. Как проиллюстрировано, точки 48 траектории движения, находящиеся в промежутке с первой по пятую точки 48A-48E траектории движения, соответственно, пропущены в последовательности 84 прибытия транспортного средства. В качестве альтернативы, точки 48 траектории движения, находящиеся в промежутке с первой по пятую точки 48A-48E траектории движения, соответственно, могут быть включены в последовательность 84 прибытия транспортного средства.
Последовательность прибытия транспортного средства может начинаться значениями идентификатора, интенсивности сигнала и времени прохождения для узла 62A первого въезда/выезда на/с парковки. Водитель будет знать, что транспортное средство 10 находится на первом въезде/выезде 64A на/с парковки, когда радиосигнал въезда/выезда на/с парковки очень сильно обнаруживается сотовым устройством 32.
На этапе S12 оцененное время прибытия транспортного средства 10 на предложенном месте 80 парковки все время обновляется. Оцененное время прибытия может отображаться водителю, например, посредством системы 26 связи. Также подтверждается продолжающееся намерение водителя занять предложенное место 80 парковки.
На этапе S13 транспортное средство 10 попадает в зону 42 парковки и переходит к навигации до предложенного места 80 парковки, придерживаясь последовательности прибытия транспортного средства. Навигация с первой по пятую точки 48A-48E траектории движения, соответственно, может выполняться с использованием данных навигационного счисления пути, переданных сервером 50 с последовательностью прибытия транспортного средства. Навигация с навигационным счислением пути известна специалистам в данной области техники и, для транспортного средства 10, использует азимут, измеренный магнитометром 22, и расстояние, измеренное датчиком 18 положения колес, от одной до другой точки траектории движения. Азимут и расстояние включены в данные навигационного счисления пути, переданные с сервера 50. В качестве альтернативы, азимут и расстояние могут определяться сотовым устройством 32. Навигация с навигационным счислением пути может выполняться модулем 30 навигации или сотовым устройством 32. Направления навигации, выданные сотовым устройством 32, могут отображаться водителю в системе 26 связи через APIM 28.
В качестве альтернативы, навигация по последовательности 84 прибытия транспортного средства совершается сотовым устройством 32 с использованием известных способов радиочастотной триангуляции, то есть радиопеленгации - для выдачи направлений навигации водителю. Направления могут отображаться водителю в системе 26 связи через APIM 28. Сотовое устройство 32 использует радиочастотную триангуляцию с помощью радиосигналов 58, принятых приемником 36 LPR и значений интенсивности, и времени прохождения сигнала для с первой по пятую точек 48A-48E траектории движения в последовательности прибытия транспортного средства.
Для навигации с навигационным счислением пути или радиочастотной триангуляцией, сотовое устройство 32 может выдавать направления или данные навигации, которые передаются в систему 26 связи через APIM 28 и без использования модуля 30 навигации. По существу, модуль 30 навигации может быть не включен в транспортное средство 10. В качестве альтернативы, программа 78 может всего лишь сообщать водителю или пользователю, что предложенное место 80 парковки доступно, с или без общего местонахождения, такого как номер ряда парковки или другой идентификатор, и без последовательности 84 прибытия транспортного средства.
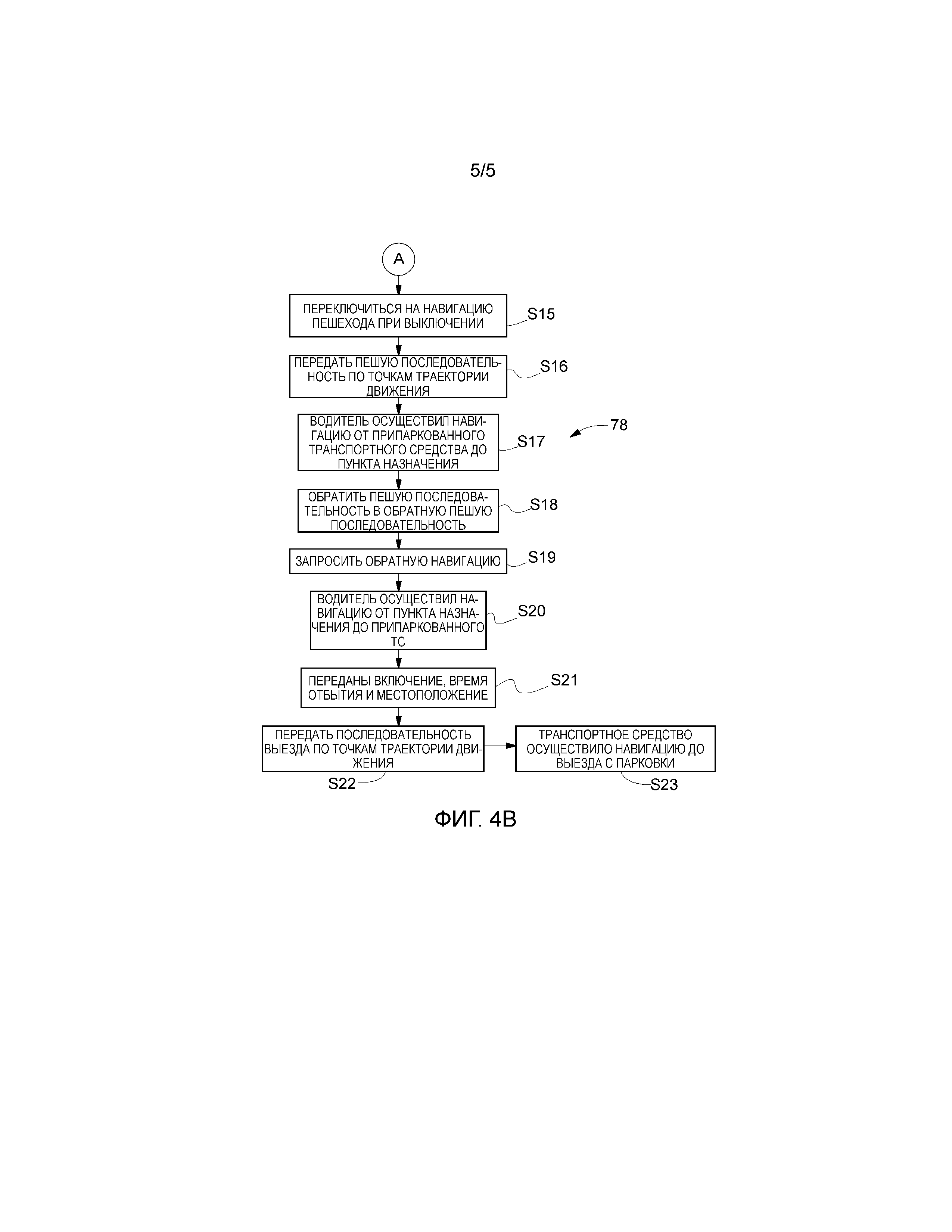
На этапе S14 водитель повернул замок 14 зажигания в выключенное положение, то есть выключил зажигание. Время прибытия транспортного средства 10 на предложенное место 80 парковки, местоположение по GNSS и/или значения интенсивности и времени прохождения радиосигналов для того, где припарковано транспортное средство 10, передаются на сервер 50, чтобы регистрироваться в базе 74 данных. К тому же, при выключении зажигания, на этапе S15, сотовое устройство 32 передает время пешего отбытия на сервер 50 для регистрации в базе 74 данных.
На этапе S16 сервер 50 выдает и передает последовательность 86 пешего прибытия по точкам 48 траектории движения на сотовое устройство 32. Последовательность 86 пешего прибытия направляет водителя с предложенного места 80 парковки в пункт 70 назначения. Как проиллюстрировано, и является типичным, последовательность 86 пешего прибытия придерживается того же самого маршрута, что и пешее расстояние 80. В качестве альтернативы, последовательность 86 пешего прибытия может быть иной, чем пешее расстояние 82. Например, последовательность 86 пешего прибытия может быть иной, чем пешее расстояние 82, когда условия, такие как движение транспорта или погода, изменяются после того, как последовательность 84 прибытия транспортного средства выдана сервером 50 на сотовое устройство 32.
Как проиллюстрировано, последовательность 86 пешего прибытия включает в себя пятую, шестую, седьмую, восьмую и девятую точки 48E-48I траектории движения, соответственно, и заканчивается точкой 72 траектории движения пешего пункта назначения. Аналогично последовательности 84 прибытия транспортного средства, точки 48 траектории движения, находящиеся в промежутке между пятой точкой 48E траектории движения и точкой 72 траектории движения пешего пункта назначения, могут быть пропущены или включены в состав.
Водитель выходит из транспортного средства 10, чтобы осуществлять навигацию в пеший пункт 70 назначения пешком, придерживаясь последовательности 86 пешего прибытия. Навигация с пятой по девятую точки 48E-48I траектории движения, соответственно, и точкой 72 траектории движения пешего пункта назначения может выполняться с использованием данных навигационного счисления пути, переданных сервером 50 с последовательностью 86 пешего прибытия. В качестве альтернативы, водитель может осуществлять навигацию с первой по пятую точки 48E-48I траектории движения, соответственно, и точкой 72 траектории движения пешего пункта назначения с использованием известных способов радиочастотной триангуляции со значениями интенсивности и времени прохождения сигналов для с пятой по девятую точек 48E-48I траектории движения, соответственно, и точкой 72 пешего пункта назначения в последовательности прибытия транспортного средства. Навигация по последовательности 86 пешего прибытия обеспечивается сотовым устройством 32.
По достижению пункта 70 назначения, на этапе S18, сотовое устройство 32 обращает порядок точек 48 траектории движения в последовательности 86 пешего прибытия в последовательность 88 пешего отбытия по точкам 48 траектории движения для обратного пути от пункта 70 назначения до предложенного места 80 парковки. Например, когда последовательность 86 пешего прибытия, по порядку, является с пятой по девятую точками 48E-48I траектории движения, соответственно, и заканчивается точкой 72 траектории движения пешего пункта назначения, тогда сотовое устройство 32 обращает последовательность 86 пешего прибытия, чтобы она была последовательностью 88 пешего отбытия, по порядку, из точки 72 траектории движения пешего пункта назначения и с девятой по пятую точки 48I-48E траектории движения. Сотовое устройство также обращает информацию навигационного счисления пути для последовательности 86 пешего прибытия, чтобы вела от точки 72 траектории движения пешего пункта назначения до пятой точки 48E траектории движения. В качестве альтернативы, сервер 50 может выдавать последовательность 88 пешего отбытия. Например, сервер 50 может выдавать последовательность 88 пешего отбытия, обращая порядок точек 48 траектории движения в последовательности 86 пешего прибытия.
Как проиллюстрировано, последовательность 88 пешего отбытия придерживается маршрута последовательности 86 пешего прибытия. В качестве альтернативы, последовательность 88 пешего отбытия может быть иной, чем проиллюстрированная.
На этапе S19 по завершению его или ее действий в пункте 70 назначения водитель использует сотовое устройство 32 для запрашивания навигации обратно на предложенное место 80 парковки. На этапе S20, водитель осуществляет навигацию по последовательности 88 пешего отбытия с использованием навигационного счисления пути или радиочастотной триангуляции, предусмотренных сотовым устройством 32.
На этапе S21 время отбытия припаркованного транспортного средства, а также местоположение по GNSS и/или значения интенсивности и времени прохождения сигнала для того, где припарковано транспортное средство 10, передаются сотовым устройством 32 на сервер 50, когда водитель поворачивает замок 14 зажигания обратно во включенное положение, то есть включает зажигание, и транспортное средство 10 отбывает с предложенного места 80 парковки. Времена прибытия и отбытия припаркованного транспортного средства могут использоваться сервером 50 для расчета продолжительности занятости предложенного места 80 парковки транспортным средством 10 для выставления счетов или другого анализа.
На этапе S22 сервер 50 выдает и передает последовательность 90 отбытия транспортного средства по точкам 48 траектории движения, которая ведет с предложенного места 80 парковки на дорогу 76. Последовательность 90 отбытия транспортного средства может быть последовательностью 84 прибытия транспортного средства в обратном направлении. В качестве альтернативы, последовательность 90 отбытия транспортного средства может быть иной, чем последовательность 84 прибытия транспортного средства в обратном направлении, вследствие условий, таких как движение транспорта, погода или следующий пункт назначения водителя. Как проиллюстрировано, последовательность прибытия транспортного средства включает в себя пятую точку 48E траектории движения, десятую, одиннадцатую и двенадцатую точки 48J-48L траектории движения, соответственно. Аналогично последовательности 84 прибытия транспортного средства, точки 48 траектории движения, находящиеся в промежутке между пятой точкой 48E траектории движения и десятой, одиннадцатой и двенадцатой точками 48J-48L траектории движения, соответственно, могут быть не включены или включены в состав.
На этапе S23 транспортное средство 10 осуществляет навигацию вовне зоны 42 парковки, придерживаясь последовательности 90 отбытия транспортного средства, с использованием данных навигационного счисления пути, переданных сервером 90, или с использованием радиочастотной триангуляции. Аналогично последовательности 84 прибытия транспортного средства, навигация с навигационным счислением пути обеспечивается модулем 30 навигации или сотовым устройством 32, а навигация с радиочастотной триангуляцией обеспечивается сотовым устройством 32.
В соответствии с вышеизложенным, был описан способ навигации транспортного средства, имеющий значительные преимущества над предшествующим уровнем техники. Система навигации транспортного средства предусмотрена для того, когда сигнал GNSS недоступен или же ухудшен.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Автомобильный виртуальный датчик влажности
Взаимодействие между транспортными средствами для упорядочивания дорожного движения
Транспортное средство, способ и система для планирования режимов транспортного средства с использованием изученных предпочтений пользователя
Система и способ для контактирования с занимающими места людьми удаленного транспортного средства с использованием dsrc
Способ для оценивания влажности окружающей среды
Определение позиции устройства в транспортном средстве
Система и способ привлечения внимания водителя транспортного средства
Головное транспортное средство, транспортное средство и способ для помощи на перекрестках с использованием специализированной связи на коротких расстояниях
Анализ данных от датчика частиц в транспортном средстве
Система для контроля совместных поездок ни транспортном средстве (варианты) и способ контроля совместных поездок на транспортном средстве

