Результат интеллектуальной деятельности: ВЗАИМОДЕЙСТВИЕ МЕЖДУ ТРАНСПОРТНЫМИ СРЕДСТВАМИ ДЛЯ УПОРЯДОЧИВАНИЯ ДОРОЖНОГО ДВИЖЕНИЯ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение в общем относится к транспортным средствам с взаимодействующим адаптивным круиз-контролем и, в частности, к взаимодействию между транспортными средствами для упорядочивания дорожного движения.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Затор дорожного движения возникает в случае перекрытия одной или более полос движения многополосной дороги, например, из-за строительных работ или аварии. Перекрытые полосы движения снижают интенсивность потока транспортных средств на участке дороги с перекрытыми полосами движения. Снижение интенсивности потока усугубляется из-за психологии водителей, которые сосредоточены на своих индивидуальных предпочтениях в отношении времени поездки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Приложенная формула изобретения определяет настоящую заявку. Настоящее раскрытие обобщает аспекты вариантов выполнения и не должно использоваться для ограничения формулы изобретения. Другие реализации рассматриваются в соответствии с описанными в настоящем документе технологиями, которые станут понятны специалисту в области техники при изучении следующих далее чертежей и подробного описания, и такие реализации находятся в пределах объема охраны настоящей заявки.
[0004] Раскрыты примерные варианты выполнения взаимодействия между транспортными средствами для упорядочивания дорожного движения. Примерное раскрытое взаимодействующее транспортное средство включает в себя примерный модуль связи между транспортными средствами и примерный модуль взаимодействующего адаптивного круиз-контроля. Примерный модуль взаимодействующего адаптивного круиз-контроля определяет местоположение перекрытого участка. Примерный модуль взаимодействующего адаптивного круиз-контроля также взаимодействует с другими взаимодействующими транспортными средствами для формирования группы стандартных транспортных средств. Кроме того, примерный модуль взаимодействующего адаптивного круиз-контроля взаимодействует с другими взаимодействующими транспортными средствами для перемещения сформированной группы через перекрытый участок с постоянной скоростью.
В дополнительном аспекте стандартные транспортные средства не оборудованы модулем связи между транспортными средствами.
В другом дополнительном аспекте модуль взаимодействующего адаптивного круиз-контроля выполнен с возможностью обнаружения наличия перекрытого участка.
В еще одном дополнительном аспекте для обнаружения наличия перекрытого участка модуль взаимодействующего адаптивного круиз-контроля выполнен с возможностью обнаружения перехода дорожного движения из состояния свободного потока в состояние синхронного потока.
В еще одном дополнительном аспекте для обнаружения перехода дорожного движения из состояния свободного потока в состояние синхронного потока модуль взаимодействующего адаптивного круиз-контроля выполнен с возможностью отслеживания дистанции и изменения дистанции.
В еще одном дополнительном аспекте для обнаружения перехода дорожного движения из состояния свободного потока в состояние синхронного потока модуль взаимодействующего адаптивного круиз-контроля выполнен с возможностью отслеживания степени доступности пространства между транспортными средствами.
В еще одном дополнительном аспекте для взаимодействия с другими взаимодействующими транспортными средствами для формирования группы стандартных транспортных средств модуль взаимодействующего адаптивного круиз-контроля выполнен с возможностью определения целевого местоположения и целевого периода времени для взаимодействующего транспортного средства совместно с другими взаимодействующими транспортными средствами.
В еще одном дополнительном аспекте модуль взаимодействующего адаптивного круиз-контроля выполнен с возможностью регулировки скорости взаимодействующего транспортного средства для достижения целевого местоположения в течение целевого периода времени.
В еще одном дополнительном аспекте для определения местоположения перекрытого участка модуль взаимодействующего адаптивного круиз-контроля выполнен с возможностью приема посредством модуля связи между транспортными средствами сообщения от другого взаимодействующего транспортного средства, которое преодолело перекрытый участок, причем сообщение включает в себя местоположение перекрытого участка.
В еще одном дополнительном аспекте для взаимодействия с другими взаимодействующими транспортными средствами для формирования группы стандартных транспортных средств модуль взаимодействующего адаптивного круиз-контроля выполнен с возможностью перемещать взаимодействующее транспортное средство при взаимодействии с другими взаимодействующими транспортными средствами для формирования двух рядов по всем полосам дорожного движения в направлении движения, так чтобы стандартные транспортные средства находились между двумя рядами.
[0005] Примерный способ включает в себя этап, на котором определяют местоположение перекрытого участка. Примерный способ также включает в себя этап, на котором взаимодействуют посредством модуля связи между транспортными средствами с другими взаимодействующими транспортными средствами для формирования группы стандартных транспортных средств. Кроме того, примерный способ включает в себя этап, на котором взаимодействуют с другими взаимодействующими транспортными средствами для перемещения сформированной группы через перекрытый участок с постоянной скоростью.
В дополнительном аспекте стандартные транспортные средства не оборудованы модулем связи между транспортными средствами.
В другом дополнительном аспекте способ включает в себя этап, на котором обнаруживают наличие перекрытого участка.
В еще одном дополнительном аспекте обнаружение наличия перекрытого участка включает в себя обнаружение перехода дорожного движения из состояния свободного потока в состояние синхронного потока.
В еще одном дополнительном аспекте обнаружение перехода дорожного движения из состояния свободного потока в состояние синхронного потока включает в себя отслеживание дистанции и изменения дистанции.
В еще одном дополнительном аспекте обнаружение перехода дорожного движения из состояния свободного потока в состояние синхронного потока включает в себя отслеживание степени доступности пространства между транспортными средствами.
В еще одном дополнительном аспекте взаимодействие с другими взаимодействующими транспортными средствами для формирования группы стандартных транспортных средств включает в себя определение целевого местоположения и целевого периода времени для взаимодействующего транспортного средства совместно с другими взаимодействующими транспортными средствами.
В еще одном дополнительном аспекте способ включает в себя этап, на котором регулируют скорость взаимодействующего транспортного средства для достижения целевого местоположения в течение целевого периода времени.
В еще одном дополнительном аспекте определение местоположения перекрытого участка включает в себя прием посредством модуля связи между транспортными средствами сообщения от другого взаимодействующего транспортного средства, которое преодолело перекрытый участок, причем сообщение включает в себя местоположение перекрытого участка.
[0006] Примерный материальный машиночитаемый носитель содержит инструкции, которые при выполнении побуждают транспортное средство к определению посредством модуля связи между транспортными средствами местоположения перекрытого участка на основании сообщения от второго взаимодействующего транспортного средства, находящегося вблизи перекрытого участка. Кроме того, инструкции побуждают транспортное средство к взаимодействию посредством модуля связи между транспортными средствами с множеством третьих взаимодействующих транспортных средств для формирования группы стандартных транспортных средств. Примерные инструкции также побуждают транспортное средство к взаимодействию посредством модуля связи между транспортными средствами с множеством третьих взаимодействующих транспортных средств для перемещения сформированной группы через перекрытый участок с постоянной скоростью, причем никаких сообщений о взаимодействии не передается стандартным транспортным средствам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Для лучшего понимания изобретения может быть сделана ссылка на варианты выполнения, показанные на следующих далее чертежах. Компоненты на чертежах необязательно выполнены в масштабе, и связанные элементы могут быть опущены, или в некоторых примерах пропорции могут быть преувеличены, чтобы подчеркнуть и наглядно проиллюстрировать новые описанные в настоящем документе признаки. В дополнение, компоненты системы могут быть расположены различным образом, известным в уровне техники. Кроме того, на чертежах одинаковые ссылочные позиции обозначают соответствующие части на различных видах.
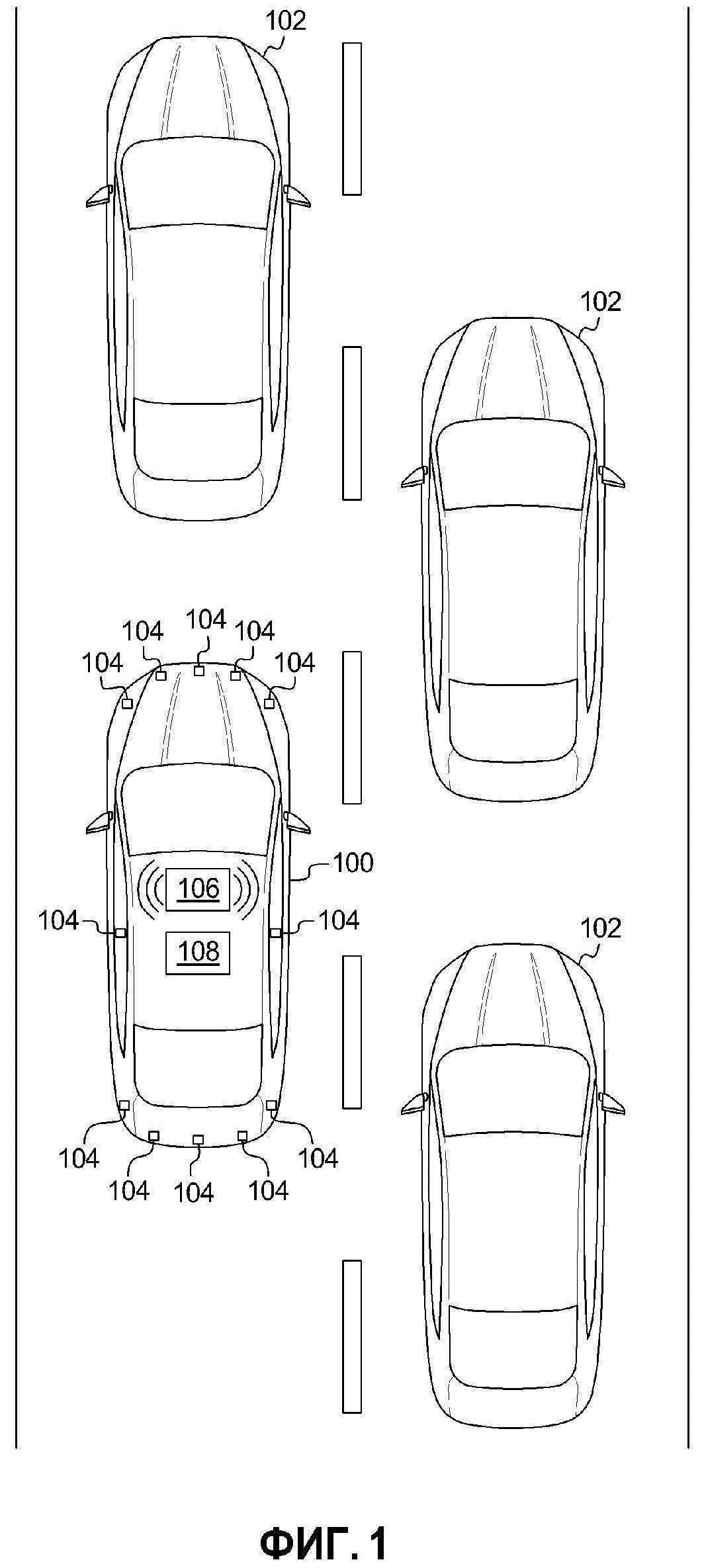
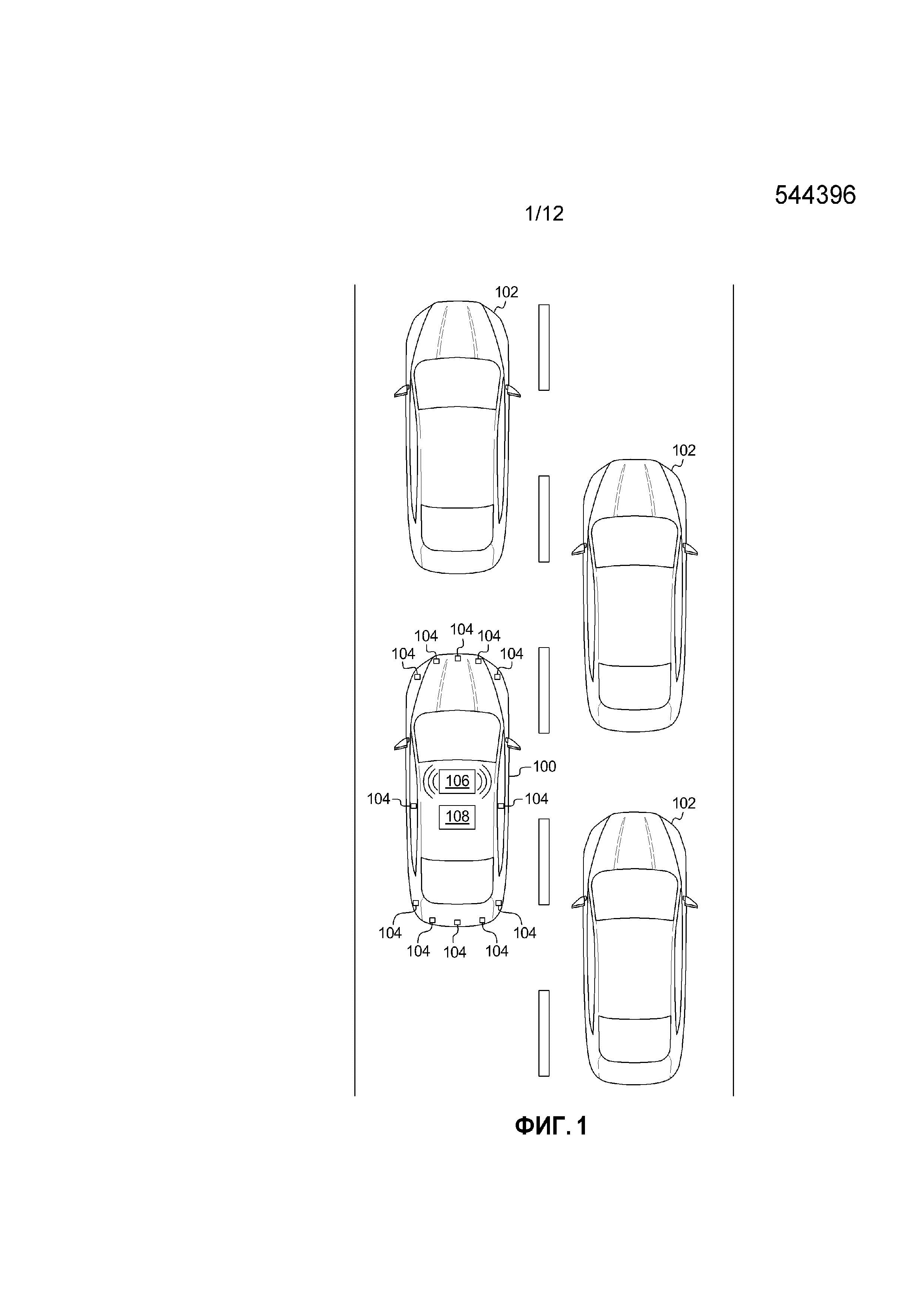
[0008] Фиг. 1 иллюстрирует взаимодействующее транспортное средство, выполненное с возможностью упорядочивания дорожного движения, которое работает в соответствии с замыслами настоящего изобретения.
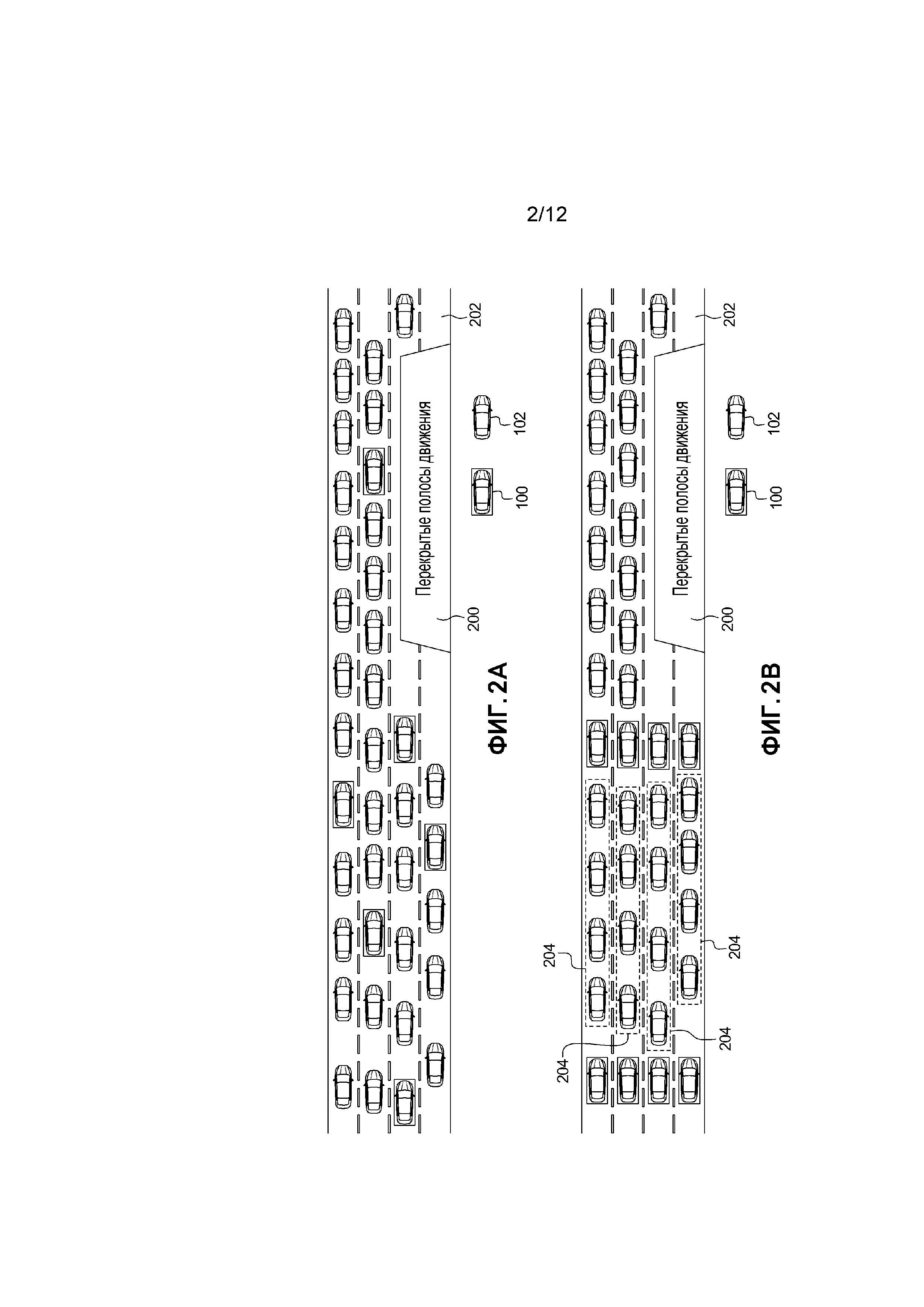
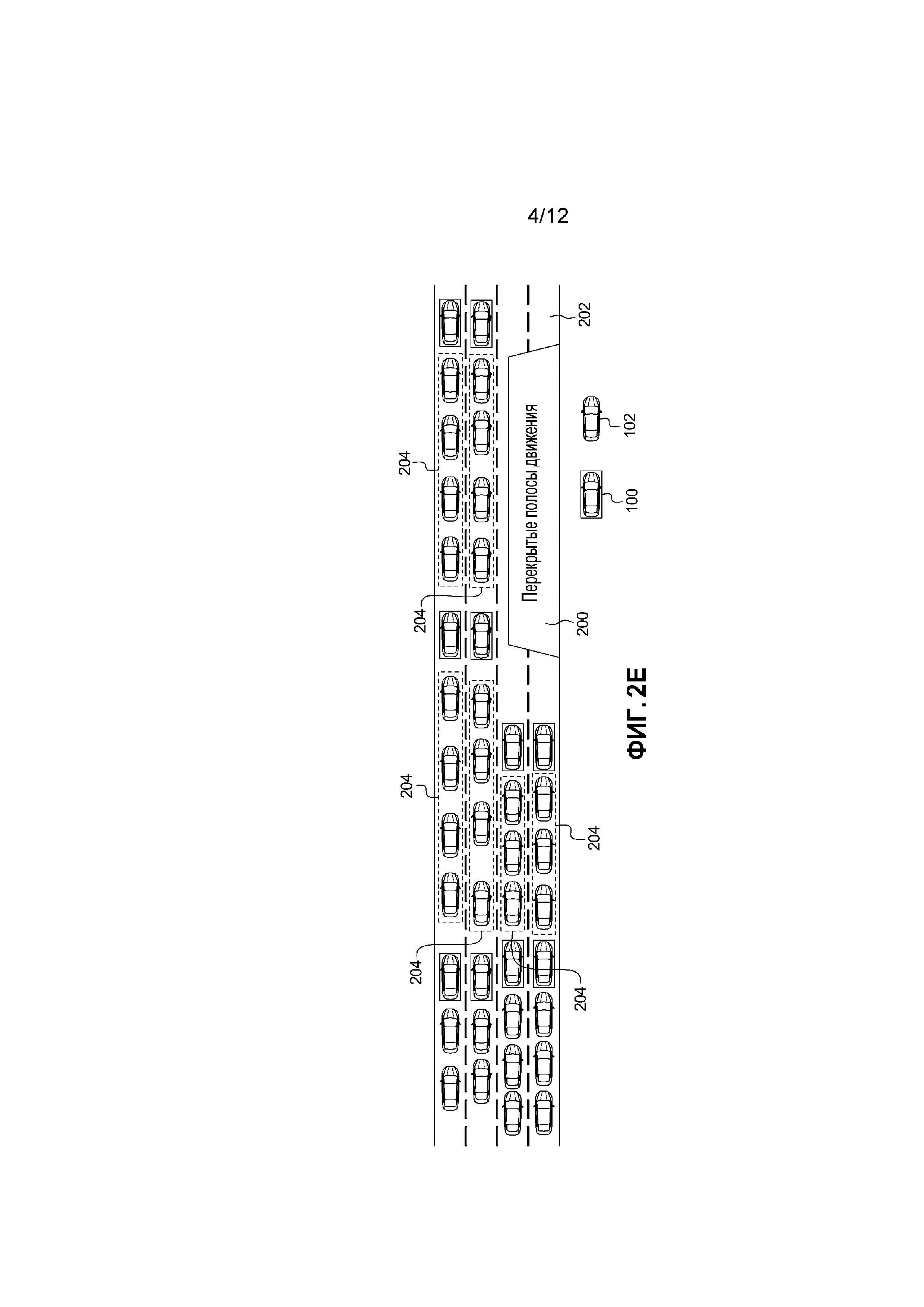
[0009] Фиг. 2А-2E иллюстрируют взаимодействующие транспортные средства, выполненные с возможностью упорядочивания дорожного движения для направления стандартных транспортных средств через перекрытый участок дороги.
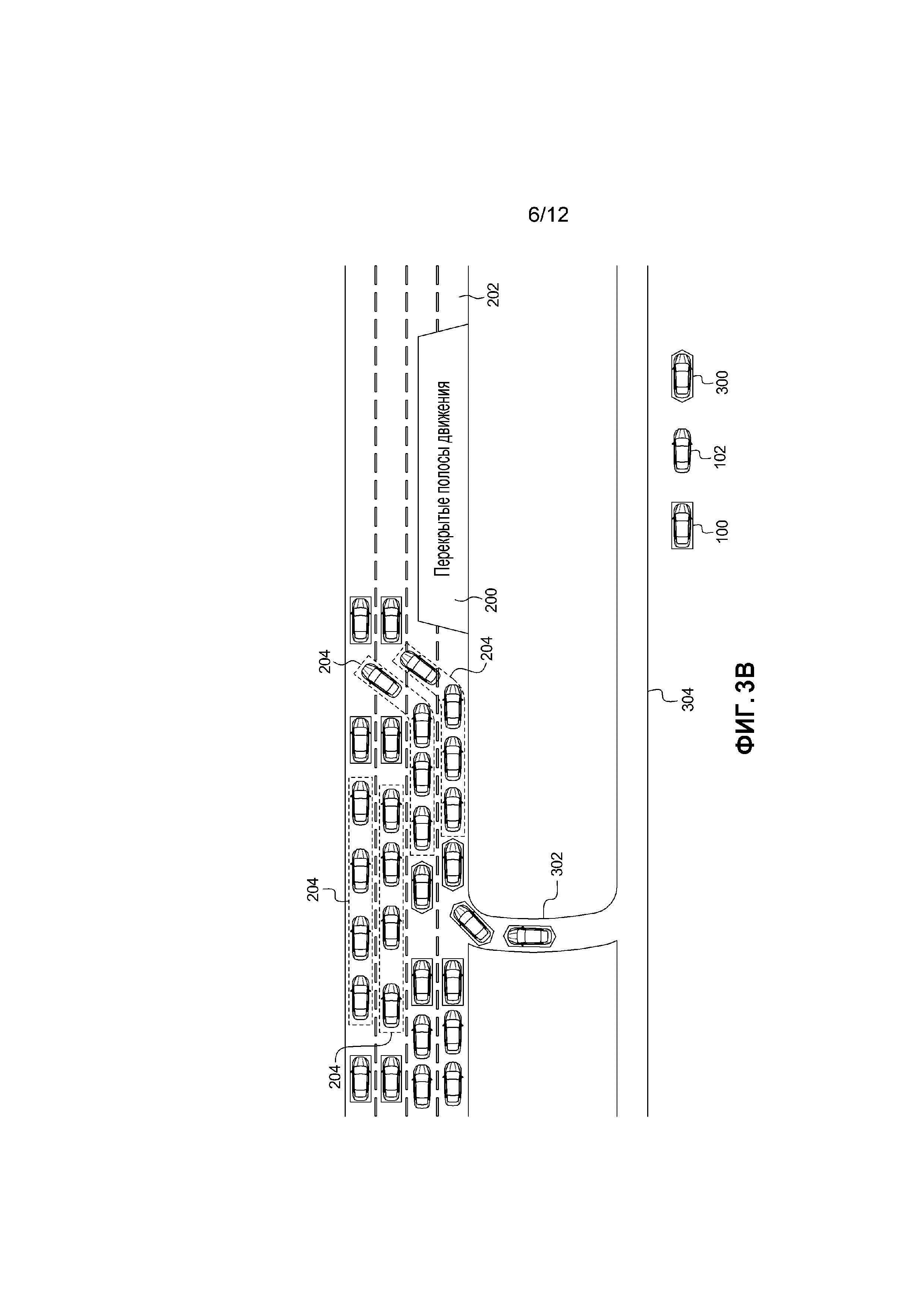
[0010] Фиг. 3A и 3B иллюстрируют взаимодействующие транспортные средства, выполненные с возможностью упорядочивания дорожного движения для направления стандартных транспортных средств, вызывающих блокировку выезда.
[0011] Фиг. 4 представляет собой график, иллюстрирующий обнаружение перекрытого участка дороги датчиками взаимодействующих транспортных средств 100, показанных на Фиг. 1.
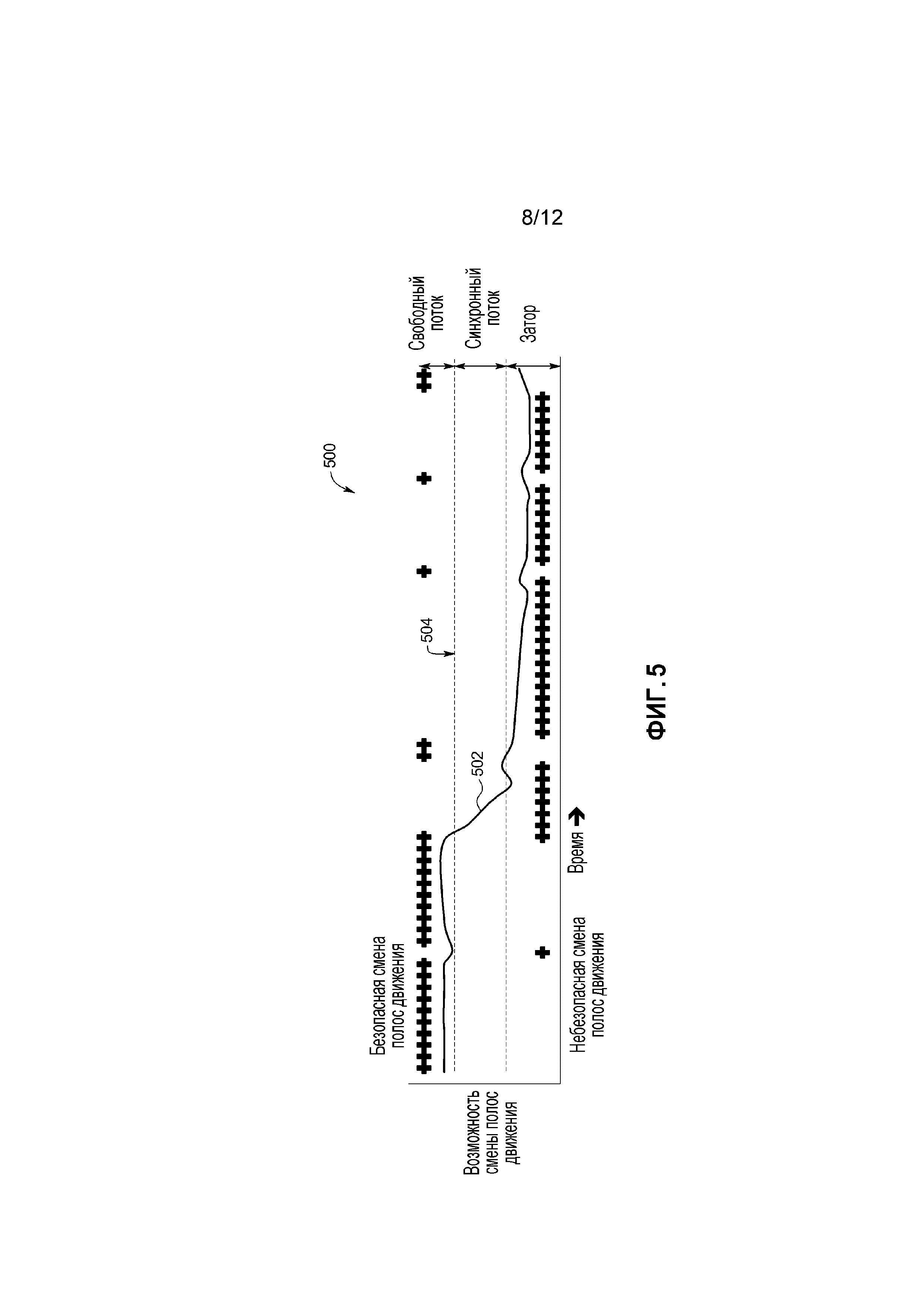
[0012] Фиг. 5 представляет собой график, иллюстрирующий обнаружение перекрытого участка дороги датчиками определения дальности взаимодействующего транспортного средства, показанного на Фиг. 1.
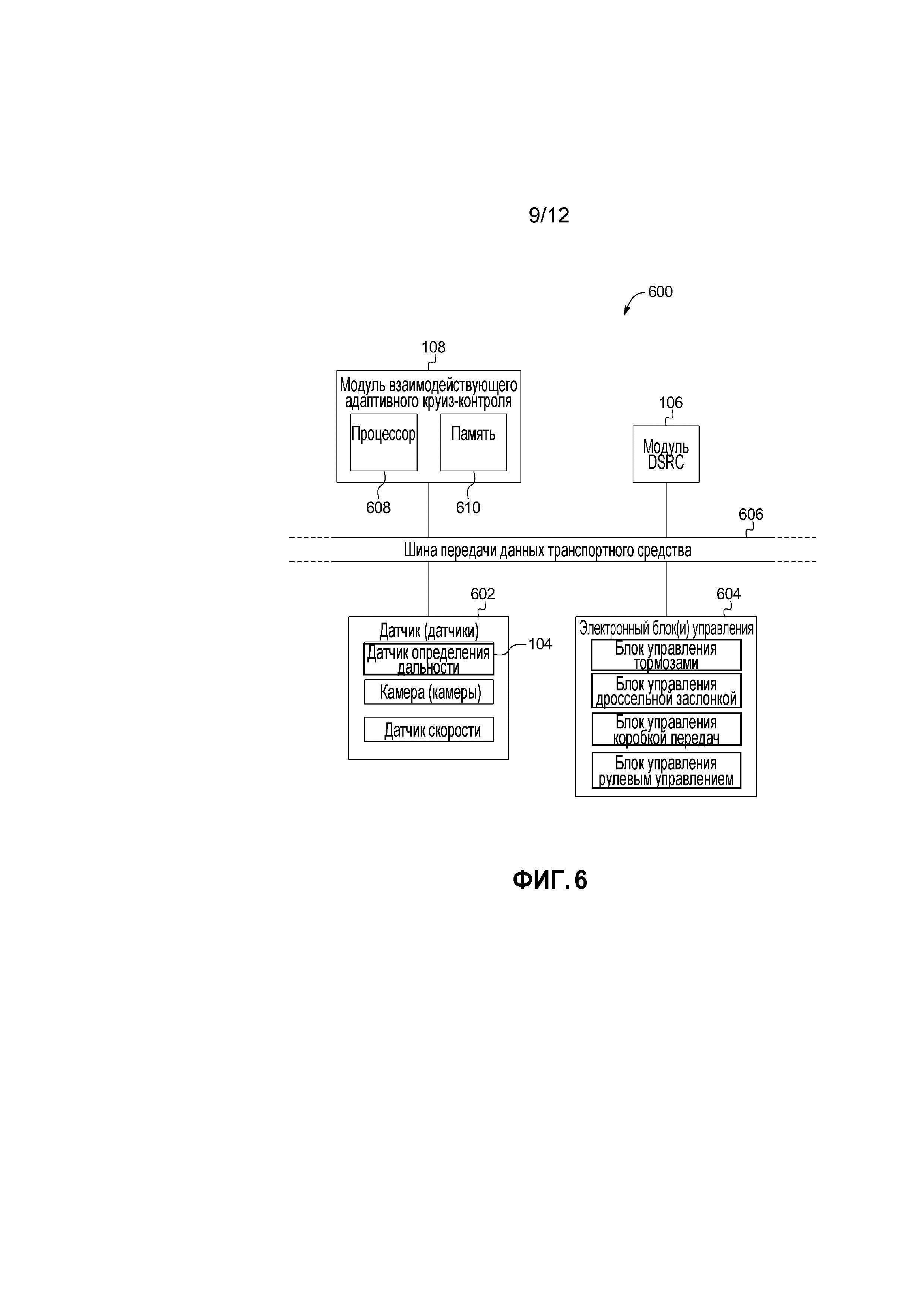
[0013] Фиг. 6 представляет собой структурную схему электронных компонентов взаимодействующего транспортного средства, показанного на Фиг. 1.
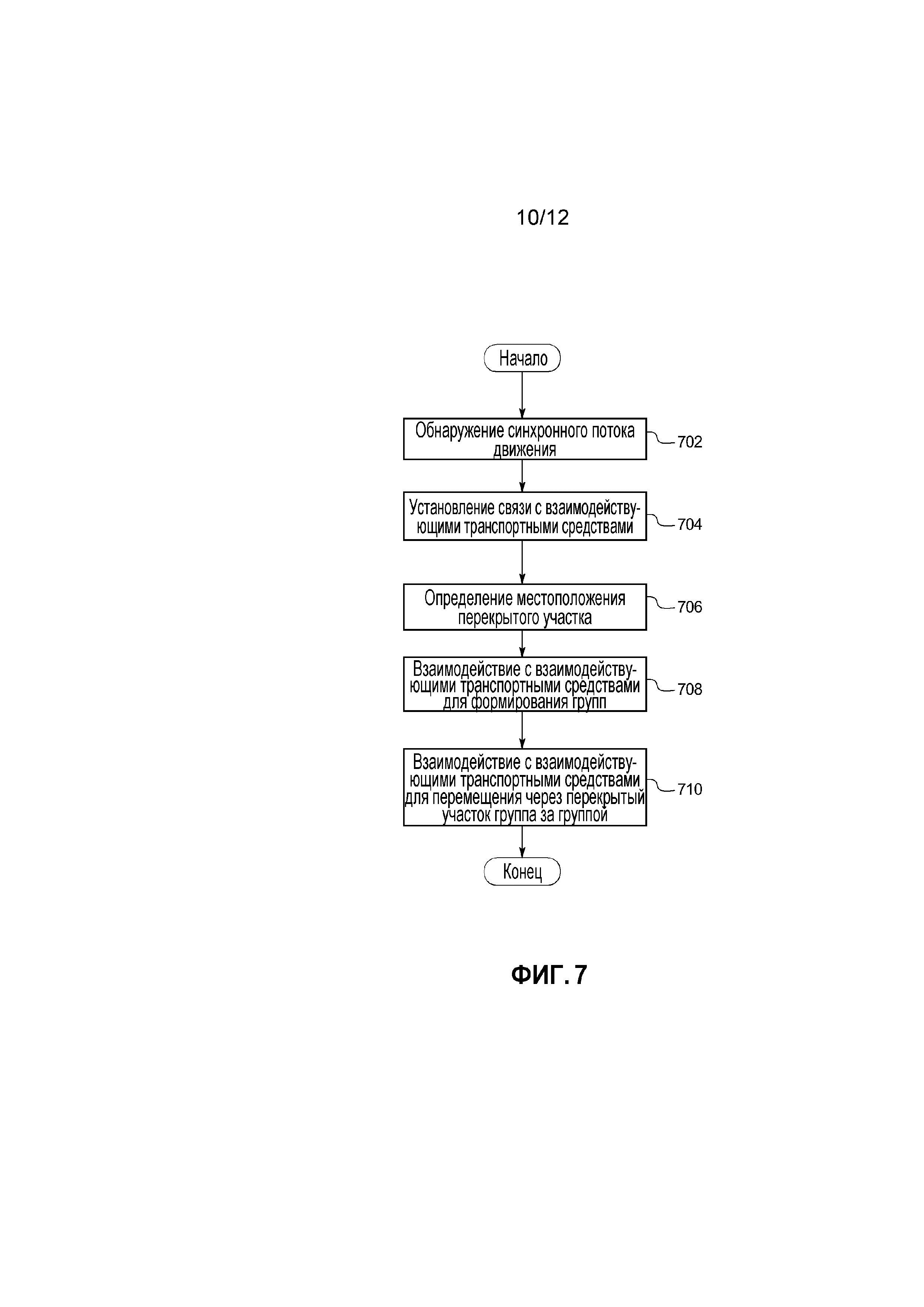
[0014] Фиг. 7 представляет собой блок-схему способа упорядочивания дорожного движения через перекрытый участок дороги.
[0015] Фиг. 8 представляет собой блок-схему способа взаимодействия взаимодействующих транспортных средств на Фиг. 1 для упорядочивания дорожного движения через перекрытый участок.
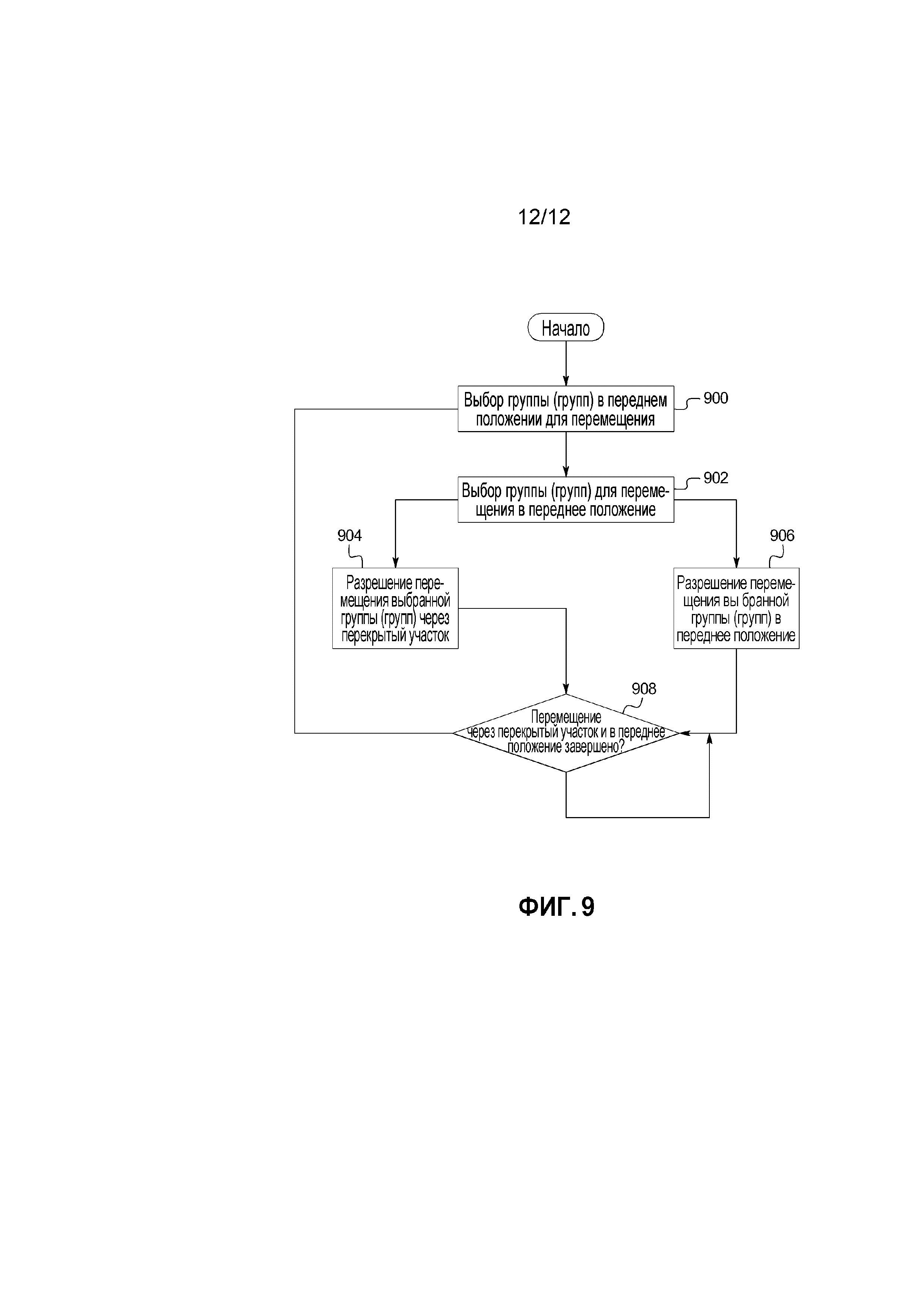
[0016] Фиг. 9 представляет собой блок-схему способа взаимодействия взаимодействующих транспортных средств на Фиг. 1 для перемещения группы через перекрытый участок.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
[0017] Хотя изобретение может быть выполнено в различных формах, на чертежах показаны и далее будут описаны некоторые примерные и неограничивающие варианты выполнения с пониманием, что настоящее раскрытие следует рассматривать как иллюстративный пример изобретения, а не как ограничение изобретения конкретными проиллюстрированными вариантами выполнения.
[0018] Водители обычно предпочитают оптимизировать индивидуальное время поездки. Однако при столкновении с перекрытым участком в интересах всех водителей на дороге приоритет переключается с индивидуального предпочтения в отношении времени поездки на групповую интенсивность потока на перекрытом участке. В данном контексте перекрытый участок относится к участку многополосной дороги, на котором перекрыта одна или более полос движения, что приводит к слиянию по меньшей мере одной полосы движения с другой полосой движения. Например, федеральная автомагистраль может иметь четыре полосы движения в северном направлении с двумя перекрытыми полосами движения, что приводит к тому, что две перекрытые полосы движения должны слиться с двумя неперекрытыми полосами движения. В качестве другого примера четырехполосная федеральная автомагистраль обычно имеет интенсивность потока 24000 автомобилей в час, и перекрытый участок может приводить к тому, что участок федеральной автомагистрали будет иметь интенсивность потока в лучшем случае 12000 автомобилей в час. Однако в таком примере интенсивность потока на перекрытом участке снижается из-за недостаточной координации действий водителей. Групповая интенсивность потока зависит от движения транспортных средств по перекрытому участку со скоординированными дистанцией и скоростью, соответствующими безопасному движению.
[0019] Водители, как правило, ускоряются слишком быстро и слишком поздно при увеличении дистанции между транспортными средствами и останавливаются слишком быстро и слишком поздно при уменьшении дистанции между транспортными средствами. Это создает волны плотности, которые перемещаются вверх по потоку и препятствуют достижению максимальной интенсивности потока. Перед перекрытым участком транспортные средства двигаются медленно, поскольку транспортные средства на перекрытых полосах движения переходят на оставшиеся открытые полосы движения. В области, где транспортные средства переходят на свободные полосы движения с перекрытых полос движения, преобладает синхронный поток. В данном контексте синхронный поток относится к (a) непрерывному потоку движения без существенных остановок и (b) синхронизации скоростей транспортных средств на разных полосах движения на многополосной дороге. Из-за слияния транспортных средств на перекрытых полосах движения с потоком на открытых полосах движения транспортные средства, стоящие в очереди на открытых полосах движения, смещаются назад. Синхронный поток может перейти в дорожный затор при увеличении плотности движения и уменьшении интенсивности потока движения. Например, за несколько миль до перекрытого участка дорожное движение может перейти из состояния свободного потока в состояние синхронного потока. В таком примере прямо перед перекрытым участком дорожное движение может перейти из состояния синхронного потока в состояние дорожного затора.
[0020] В настоящее время транспортные средства все чаще оснащаются модулями связи между транспортными средствами (V2V), которые могут взаимодействовать при движении. Эти транспортные средства включают в себя модуль взаимодействующего адаптивного круиз-контроля (CACC), который координирует, например, ускорение и замедление при движении группами для эффективного использования дорожного пространства, предотвращения аварий и взаимного предупреждения об опасностях на дороге. В данном контексте транспортные средства с модулем CACC называются «взаимодействующими транспортными средствами». Кроме того, в данном контексте транспортные средства без модуля CACC называются «стандартными транспортными средствами». Как раскрыто ниже, взаимодействующие транспортные средства координируют свое движение для упорядочивания взаимодействующих транспортных средств и стандартных транспортных средств на перекрытых участках. Взаимодействующие транспортные средства упорядочиваются в ситуациях, когда взаимодействующие транспортные средства составляют относительно небольшой процент (например, больше или равно трем процентам) транспортных средства вокруг перекрытого участка.
[0021] Взаимодействующие транспортные средства обнаруживают наличие перекрытого участка впереди на проезжей части. Для обнаружения перекрытых участков взаимодействующее транспортное средство (i) обнаруживает переход дорожного движения в состояние синхронного потока, (ii) принимает сообщение от взаимодействующего транспортного средства, которое преодолело перекрытый участок, и/или (iii) принимает уведомление от навигационной системы. При прохождении взаимодействующих транспортных средств через перекрытый участок они передают сообщение, которое включает в себя местоположение перекрытого участка и направление движения. Для перемещения через перекрытый участок взаимодействующие транспортные средства формируют стандартные транспортные средства в группы. Для формирования групп взаимодействующие транспортные средства (i) координируют свои положения на всех полосах движения и (ii) перемещаются с постоянной скоростью. Это вынуждает стандартные транспортные средства между рядами взаимодействующих транспортных средств входить в синхронизированный поток, поэтому они не могут менять полосы движения. Одно или более взаимодействующих транспортных средств ведут группу стандартных транспортных средств по открытым полосам движения перекрытого участка. Взаимодействующие транспортные средства корректируют скорость транспортных средств так, чтобы при достижении группой перекрытого участка она двигалась со скоростью, соответствующей безопасному движению, при сохранении потока движения. Таким образом, в то время как отдельные транспортные средства ожидают возможности движения по перекрытому участку, среднее время ожидания транспортных средств в целом уменьшается.
[0022] Кроме того, в некоторых примерах взаимодействующие транспортные средства взаимодействуют для обеспечения системы совместно-управляемого слияния и проезда (CMMP). Система CMMP позволяет доступ конкретных водителей к менее перегруженным полосам движения. Водители взаимодействующих транспортных средств могут принимать участие в системе, в которой коллективным образом отслеживается, записывается и оценивается поведение при вождении ими самими и другими участвующими транспортными средствами. Эта система при необходимости будет временно позволять движение конкретных взаимодействующих транспортных средств (иногда называемых «транспортными средствами-покупателями») с более высокими скоростями по менее загруженным полосам движения, а также свободное выполнение слияния и проезда. Другие участвующие взаимодействующие транспортные средства (иногда называемые «транспортными средствами-продавцами») при необходимости добровольно занимают более медленные полосы движения для обеспечения выезда транспортного средства-покупателя на свою полосу движения и движения по ней. Система CMMP работает с индивидуальными транзакциями на основе токенов, где транспортные средства-продавцы и транспортные средства-покупатели соглашаются торговать единицами криптовалюты (иногда называемыми «токенами CMMP»). Токены CMMP используются для проверки и авторизации транзакции, в которой при запросе транспортного средства-покупателя транспортные средства-продавцы при необходимости либо сами занимают более медленные полосы движения, либо позволяют транспортному средству-покупателю выезжать на свои полосы движения и двигаться по ним. Участвующие транспортные средства-продавцы получают токены CMMP от транспортного средства-покупателя. В некоторых примерах время, отведенное на запрос транспортного средства-покупателя, основано на количестве токенов CMMP, выбранном транспортным средством-покупателем для расходования в данное конкретное время. Например, водитель транспортного средства-покупателя, который опаздывает на встречу, может запрашивать у любых участвующих транспортных средств-продавцов проезд в течение 10 минут по конкретной дороге или автомагистрали за 60 токенов CMMP из расчета 10 секунд привилегированного доступа за токен.
[0023] Фиг. 1 иллюстрирует взаимодействующее транспортное средство 100, выполненное с возможностью упорядочивания дорожного движения, которое работает в соответствии с замыслами настоящего изобретения. Проиллюстрированный пример также включает в себя стандартные транспортные средства 102. Взаимодействующее транспортное средство 100 может представлять собой стандартное бензиновое транспортное средство, гибридное транспортное средство, электрическое транспортное средство, транспортное средство на топливных элементах или транспортное средство любого другого типа реализации возможности движения. Кроме того, взаимодействующее транспортное средство 100 включает в себя части, связанные с возможностью движения, такие как силовой агрегат с двигателем, коробка передач, подвеска, карданный вал и/или колеса и т.д. Взаимодействующее транспортное средство 100 является полуавтономным (например, некоторые обычные связанные с движением функции находятся под управлением взаимодействующего транспортного средства 100) или автономным (например, связанные с движением функции находятся под управлением взаимодействующего транспортного средства 100 без непосредственного участия водителя). В проиллюстрированном примере взаимодействующее транспортное средство 100 включает в себя датчики 104 определения дальности, модуль 106 специализированной связи на коротких расстояниях (DSRC) и модуль 108 взаимодействующего адаптивного круиз-контроля (CACC).
[0024] Датчики 104 определения дальности определяют дальность и скорости транспортных средств 100 и 102 вокруг взаимодействующего транспортного средства 100. Примерные датчики 104 определения дальности могут включать в себя одну или более камер, ультразвуковые датчики, сонарный датчик, лидарный датчик, радиолокационный датчик, оптический датчик или инфракрасные устройства. Датчики 104 определения дальности могут быть расположены во взаимодействующем транспортном средстве 100 и вокруг него подходящим образом. Датчики 104 определения дальности могут быть одинаковыми или разными. Например, взаимодействующее транспортное средство 100 может включать в себя множество датчиков 104 определения дальности (например, камеры, радиолокационный датчик, ультразвуковой датчик, инфракрасный датчик и т.д.) или только один датчик 104 определения дальности (например, лидарный датчик и т.д.).
[0025] Примерный модуль 106 DSRC включают в себя антенну (антенны), радиоприемник (радиоприемники) и программное обеспечение для передачи сообщений и установления связи между взаимодействующими транспортными средствами 100, инфраструктурными модулями (не показаны) и модулями на основе мобильных устройств (не показаны). Модуль 106 DSRC включает в себя приемник системы глобального позиционирования (GPS) и инерциальную навигационную систему (INS) для совместного использования местоположения взаимодействующего транспортного средства 100 и синхронизации модулей 106 DSRC других взаимодействующих транспортных средств 100. Более подробная информация о сети DSRC и о взаимодействии сети с аппаратным обеспечением и программным обеспечением транспортного средства доступна в докладе по Спецификации требований к системе (SyRS) Министерства транспорта США, июнь 2011 г. (доступен по ссылке http://www.its.dot.gov/meetings/pdf/CoreSystem_SE_SyRS_RevA%20(2011-06-13).pdf), который включен сюда путем ссылки во всей своей полноте вместе со всеми документами, упомянутыми на страницах 11-14 доклада SyRS. Системы DSRC могут быть установлены на транспортных средствах и на объектах инфраструктуры вдоль обочин. Система DSRC, включающая информацию от объектов инфраструктуры, известна как «придорожная» система. DSRC может быть объединена с другими технологиями, такими как система глобального позиционирования (GPS), связь по видимому свету (VLC), сотовая связь и радиолокатор малого радиуса действия, позволяя транспортным средствам сообщать их положение, скорость, курс, положения относительно других объектов и обмениваться информацией с другими транспортными средствами или внешними компьютерными системами. Системы DSRC могут быть интегрированы с другими системами, такими как мобильные телефоны.
[0026] DSRC представляет собой реализацию протокола связи между транспортными средствами (V2V) или между автомобилями (C2C). Также может быть использована любая другая подходящая реализация протокола V2V/C2C. В настоящее время сеть DSRC обозначается аббревиатурой или названием DSRC. Однако иногда используются другие названия, обычно связанные с «Connected Vehicle program» или т.п. Большинство этих систем представляют собой либо чистую DSRC, либо вариацию стандарта беспроводной связи IEEE 802.11. Однако кроме чистой системы DSRC, оно также охватывает специализированные системы беспроводной связи между автомобилями, которые интегрированы с GPS и основаны на протоколе IEEE 802.11 для беспроводных локальных сетей (например, 802.11p и т.д.).
[0027] Модуль 108 CACC позволяет взаимодействие с другими взаимодействующими транспортными средствами 100 через модуль 106 DSRC. Как показано на Фиг. 2А-2E, 3A и 3B, 4 и 5, модуль 108 CACC (a) определяет местоположение перекрытого участка, (b) взаимодействует с другими взаимодействующими транспортными средствами 100 для размещения транспортных средств 100 и 102 в группы и (c) координирует группы, движущиеся по перекрытому участку. Модуль 108 CACC управляет связанными с движением функциями (например, рулевым управлением, скоростью, сменой полосы движения и т.д.) взаимодействующего транспортного средства 100. Кроме того, в некоторых примерах модуль 108 CACC обеспечивает систему совместно-управляемого слияния и проезда (CMMP) путем (i) отслеживания токенов CMMP, доступных взаимодействующему транспортному средству 100, (ii) запроса привилегированного доступа к полосам движения с использованием токенов CMMP и (iii) одобрения и предоставления запрашиваемого привилегированного доступа к полосам движения в обмен на токены CMMP.
[0028] Фиг. 2А-2E иллюстрируют взаимодействующие транспортные средства 100, выполненные с возможностью упорядочивания дорожного движения для направления стандартных транспортных средств 102 через перекрытый участок 200 дороги 202. В проиллюстрированном примере на Фиг. 2A, взаимодействующие транспортные средства 100 чередуются со стандартными транспортными средствами 102. Модуль 108 CACC одного или более взаимодействующих транспортных средств 100 обнаруживает перекрытый участок 200. Модуль 108 CACC обнаруживает перекрытый участок 200 путем (a) прохождения через перекрытый участок 200, (b) приема сообщения от другого взаимодействующего транспортного средства 100 или объекта инфраструктуры, которое включает в себя местоположение и направление перекрытого участка 200, (c) обнаружения потока движения, переходящего в состояние синхронного потока (смотри приведенные ниже Фиг. 4 и 5), и/или (d) приема уведомления от навигационной системы (например, WazeTM, Google MapsTM, Apple MapsTM и т.д.) через бортовой модем сотовой связи и/или мобильное устройство, коммуникативно связанное с взаимодействующим транспортным средством 100. В ответ на обнаружение перекрытого участка 200 модуль 108 CACC через модуль 106 DSRC передает сообщение, информирующее другие взаимодействующие транспортные средства 100 о местоположении и направлении перекрытого участка 200. Например, одно из взаимодействующих транспортных средств 100 может не обнаруживать перекрытый участок 200 до тех пор, пока оно не начнет движение через перекрытый участок 200. В таком примере модуль 108 CACC может передавать сообщение, информирующее другие взаимодействующие транспортные средства 100 о местоположении и направлении перекрытого участка 200, даже если он не задействован иным образом в упорядочивании дорожного движения через перекрытый участок 200.
[0029] В проиллюстрированном примере на Фиг. 2B, модули 108 CACC взаимодействующих транспортных средств 100 взаимодействуют со стандартными транспортными средствами 102 для формирования групп 204. Для формирования групп 204 модули 108 CACC определяют местоположение, скорость и дистанцию соответствующего взаимодействующего транспортного средства 100. Дистанция определяется с помощью датчиков 104 определения дальности. Модули 108 CACC передают местоположение, скорость и дистанцию соответствующего взаимодействующего транспортного средства 100. Модули 108 CACC обмениваются информацией для определения целевых местоположений каждого из участвующих взаимодействующих транспортных средств 100 и целевых скоростей для участвующих взаимодействующих транспортных средств 100 для достижения их соответствующих целевых местоположений в по существу в одно и то же время. Целевые местоположения (a) выровнены по всем полосам движения дороги 202, блокирующей дорожное движение, и (b) определяют группы 204. Например, если дорога 202 включает в себя четыре полосы движения в одном направлении, целевые местоположения могут быть выбраны для формирования наборов из четырех групп 204 (например, одна группа 204 на полосу движения в наборе). Целевые местоположения выбраны так, что расстояние и плотность стандартных транспортных средств 102 в группах 204 предотвращает смену полос движения стандартными транспортными средствами 102. Модули 108 CACC участвующих взаимодействующих транспортных средств 100 побуждают взаимодействующие транспортные средства 100 к медленному перемещению со скоростью транспортных средств 100 и 102, въезжающих на перекрытый участок 200. Кроме того, если для перемещения в назначенное целевое местоположение одному из участвующих взаимодействующих транспортных средств 100 необходимо сменить полосу движения, другие участвующие взаимодействующие транспортные средства 100 будут маневрировать, позволяя одному из участвующих взаимодействующих транспортных средств 100 сменить полосу движения.
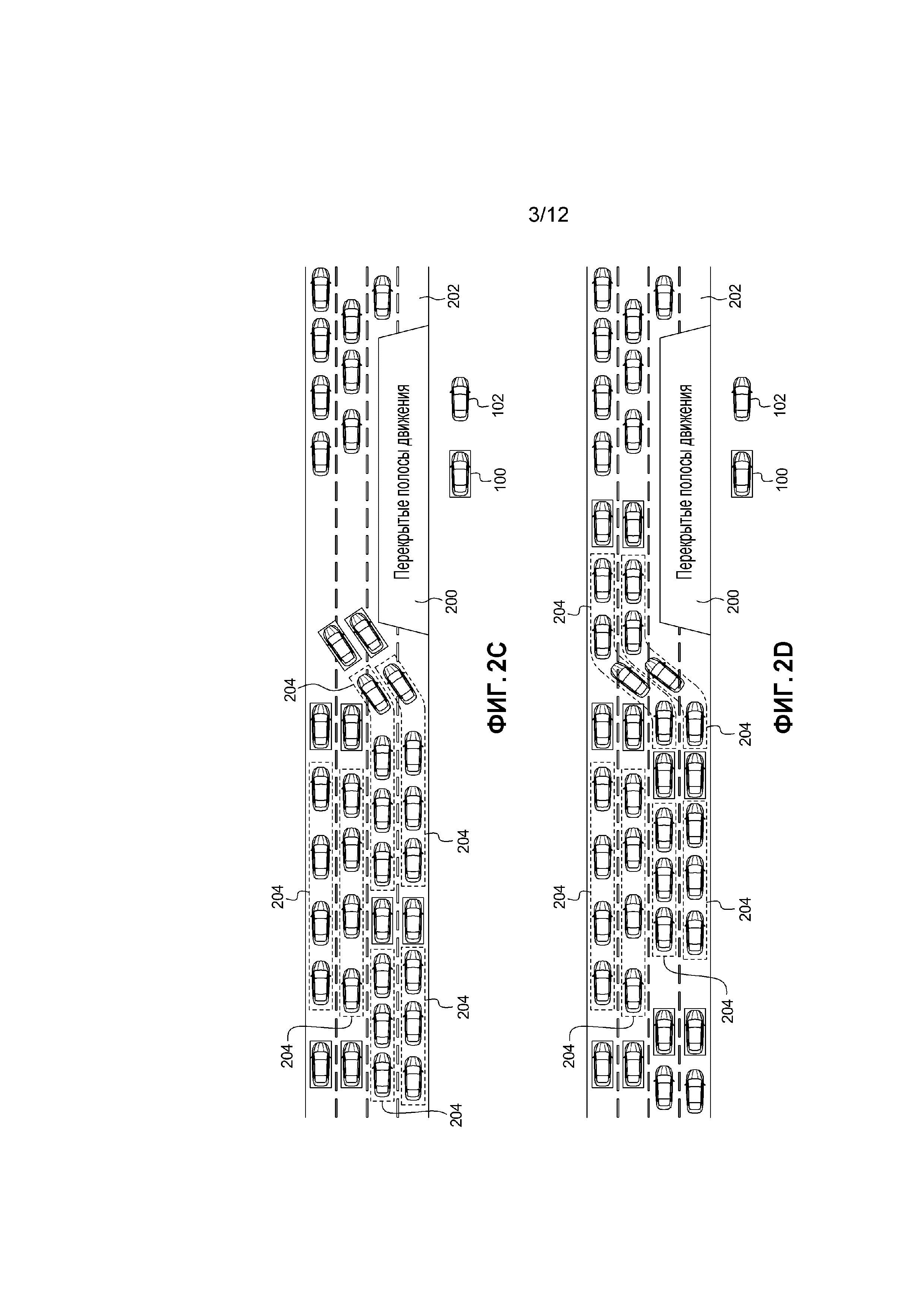
[0030] В проиллюстрированном примере на Фиг. 2C, модули 108 CACC взаимодействующих транспортных средств 100 выравнивают их по всем полосам, блокирующим дорожное движение, и оставляют небольшое пространство между взаимодействующими транспортными средствами 100, которые ведут группы 204, и транспортными средствами 100 и 102, которые в настоящее время пересекают перекрытый участок 200. Модули 108 CACC выбирают количество групп 204, равное полосам движения, доступным на перекрытом участке 200. Например, если перекрытый участок сужает дорогу 202 до двух полос движения, модули 108 CACC могут выбирать две группы 204 для одновременного перемещения. В некоторых примерах группы 204 выбираются на основе времени ожидания. В некоторых таких примерах группы 204 выбираются для минимизации среднего времени ожидания транспортных средств 100 и 102 для перемещения через перекрытый участок 200. Например, если перекрытый участок 200 сужает дорогу 202 с трех полос движения до двух полос движения, модули 108 CACC могут формировать три группы 204 (например, группу A, группу B и группу C). В таком примере модули 108 CACC могут взаимодействовать для перемещения двух групп 204 через перекрытый участок 200 за раз путем (1) первого выбора группы A и группы B, (2) второго выбора группы B и группы C и (3) третьего выбора группы C и группы A.
[0031] В проиллюстрированном примере на Фиг. 2D, модули 108 CACC взаимодействуют так, чтобы группа (группы) 204 за группой (группами) 204, выбранными для перемещения через перекрытый участок 200, перемещалась с такой же скоростью, что и выезжающая группа (группы) 204 для заполнения области, оставшейся после выезжающей группы (групп) 204, не позволяя ни одному из стандартных транспортных средств 102 в другой группе 204 выезжать на полосу движения. В проиллюстрированном примере на Фиг. 2E, модули 108 CACC взаимодействуют для продолжения перемещения групп 204 через перекрытый участок 200. Модули 108 CACC продолжают взаимодействовать до тех пор, пока либо (a) будет недостаточно взаимодействующих транспортных средств 100 для продолжения упорядочивания дорожного движения, либо (b) плотность дорожного движения не станет такой, что транспортные средства 100 и 102 смогут свободно перемещаться (например, поток не является синхронным) через перекрытый участок 200.
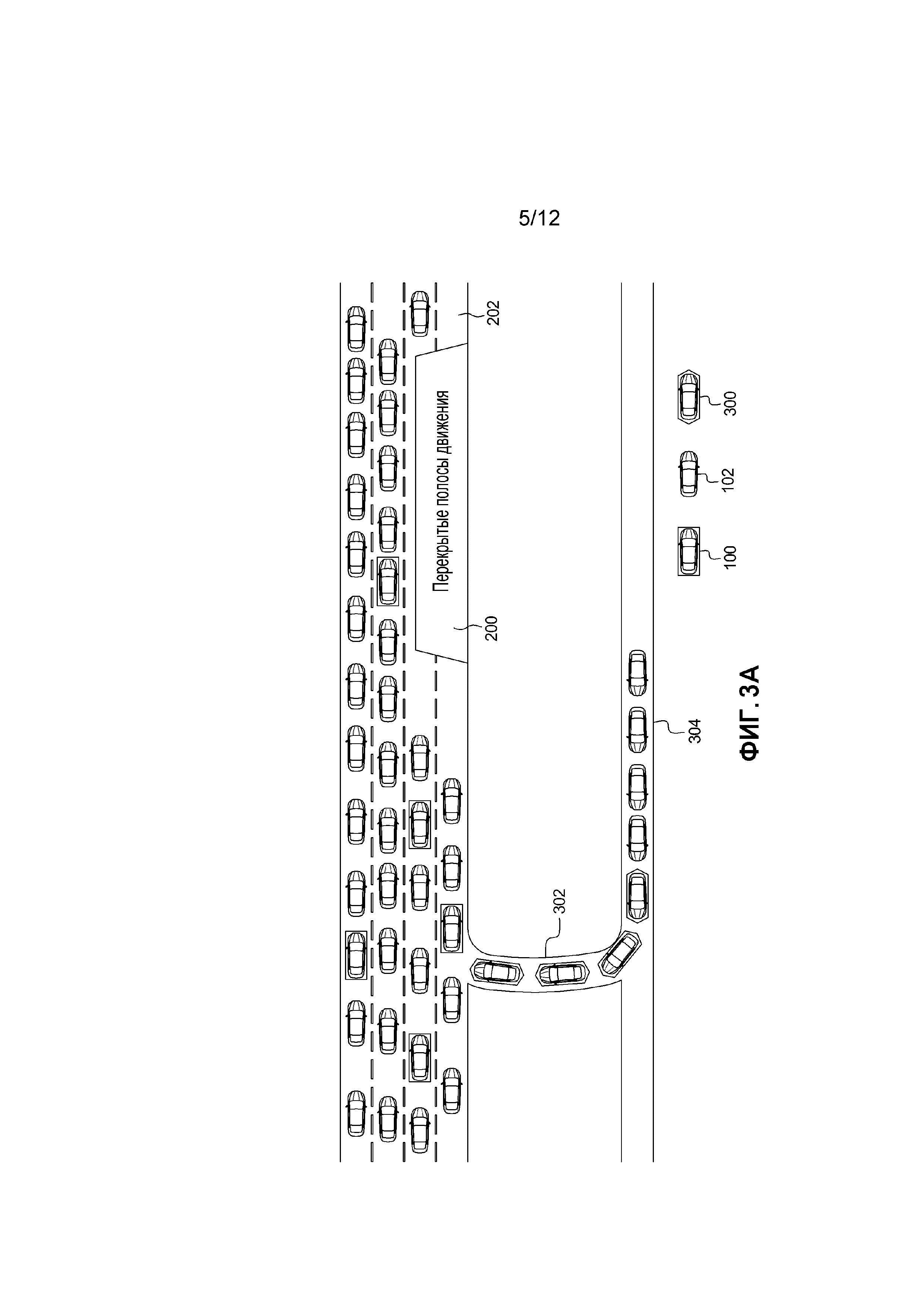
[0032] Фиг. 3A и 3B иллюстрируют взаимодействующие транспортные средства 100, выполненные с возможностью упорядочивания дорожного движения для направления стандартных транспортных средств 102, вызывающих блокировку выезда 302. Блокировка перекрестка приводит к затору на других дорогах, блокируя эти дороги, в результате попытки транспортных средств 100 и 102 выехать на дорогу 202 с выезда 302. Таким образом, перекрытый участок 200 может приводить к движению по объездным дорогам вокруг дороги 202. В проиллюстрированном примере на Фиг. 3A взаимодействующие транспортные средства 100 чередуются со стандартными транспортными средствами 102. Кроме того, второстепенные транспортные средства 300, ожидающие на выезде 302 (например, из-за перекрытого участка 200) приводят к движению по параллельной дороге 304. При нахождении перекрытого участка 200 вблизи выезда 302 модули 108 CACC координируют группы 204 с учетом второстепенных транспортных средств 300. Как проиллюстрировано в примере на Фиг. 3B, при взаимодействии модулей 108 CACC для перемещения выбранных групп 204 через перекрытый участок 200 модули 108 CACC позволяют одному или более второстепенным транспортным средствам 300 присоединяться к группе (группам) 204, движущейся через перекрытый участок 200. Модули 108 CACC перемещают участвующие взаимодействующие транспортные средства 100 так, чтобы стандартные транспортные средства 102 в других группах 204 не выезжали на одну из полос движущейся группы 204. Например, если на стороне дороги 202 с выездом 302 движутся две группы 204, модули 108 CACC могут взаимодействовать так, чтобы группа 204 за движущейся группой 204 на центральной полосе перемещалась на полосу, в то время как группа 204 за движущейся группой 204 на внешней полосе останавливается, позволяя второстепенным транспортным средствам 300 выезжать на полосу.
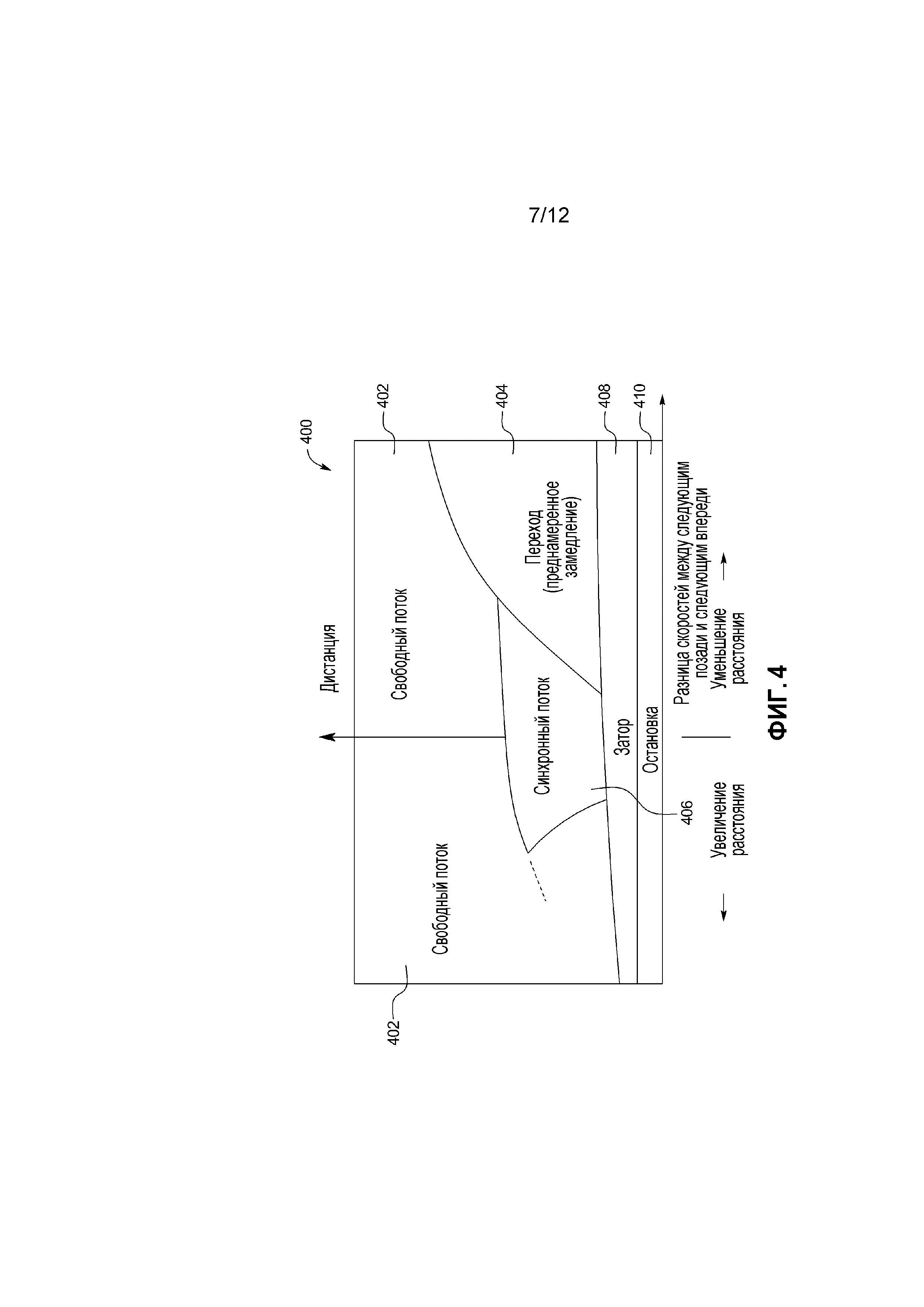
[0033] Фиг. 4 представляет собой график 400, иллюстрирующий обнаружение перекрытого участка 200 дороги 202 датчиками взаимодействующих транспортных средств 100, показанных Фиг. 1, 2А-2E и 3A и 3B. Модуль 108 CACC определяет наличие впереди перекрытого участка 200 при обнаружении модулем 108 CACC перехода свободного потока в синхронный поток. В проиллюстрированном примере модуль 108 CACC определяет (a) дистанцию (например, расстояние между взаимодействующим транспортным средством 100 и транспортным средством перед ним) и (b) величину увеличения или уменьшения дистанции (иногда называемую «изменением дистанции»). График 400 связывает дистанцию и изменение дистанции с моделью потока движения (например, свободный поток, переход в синхронный поток, синхронный поток, переход в дорожный затор и дорожный затор). В первой области 402 графика 400 транспортные средства 100 и 102 находятся в свободном потоке. В свободном потоке транспортные средства 100 и 102 перемещаются в пределах ограничения скорости без существенного торможения (например, дистанция не коррелирует со скоростью).
[0034] Во второй области 404 графика 400 транспортные средства 100 и 102 переходят в состояние синхронного потока из состояния свободного потока. Синхронный поток характеризуется непрерывным потоком движения без существенных остановок и синхронизацией скоростей транспортных средств на разных полосах движения на многополосной дороге. Во второй области дистанция уменьшается, и транспортные средства 100 и 102 начинают синхронизировать свои скорости. При нахождении взаимодействующего транспортного средства 100 во второй области 404 модуль 108 CACC определяет наличие перекрытого участка 200 перед взаимодействующим транспортным средством 100.
[0035] В третьей области 406 графика 400 транспортные средства 100 и 102 находятся в синхронном потоке. Транспортные средства 100 и 102 могут резко переходить из состояния свободного потока в состояние синхронного потока. При нахождении взаимодействующего транспортного средства 100 в третьей области 406 модуль 108 CACC определяет наличие перекрытого участка 200 перед взаимодействующим транспортным средством 100.
[0036] В четвертой области 408 графика транспортные средства 100 и 102 попадают в затор. Нахождение в заторе характеризуется прерывистым перемещением (например, перемещением на короткие расстояния с частыми остановками). При нахождении взаимодействующего транспортного средства 100 в третьей области 406 модуль 108 CACC определяет вероятное приближение перекрытого участка 200. В пятой области 410 графика 400 транспортные средства 100 и 102 останавливаются.
[0037] Фиг. 5 представляет собой график 500, иллюстрирующий обнаружение перекрытого участка 200 дороги 202 датчиками 104 определения дальности взаимодействующего транспортного средства 100, показанного на Фиг. 1. В некоторых примерах модуль 108 CACC включает в себя функцию помощи при смене полосы движения. Система помощи при смене полосы движения совместно с датчиками смены полосы движения (например, камерами, ультразвуковыми датчиками, радиолокационным датчиком и т.д.) определяет безопасный момент для смены полосы движения взаимодействующим транспортным средством 100 с использованием модели приемлемости пространства между транспортными средствами. Модель приемлемости пространства между транспортными средствами определяет наличие приемлемого пространства между транспортными средствами для смены полосы движения взаимодействующим транспортным средством 100 на основе скоростей транспортных средств 100 и 102 на целевой полосе движения. Время от времени система помощи при смене полосы движения определяет, безопасна ли смена полос движения. График 500 связывает степень доступности пространства между транспортными средствами с моделями потока движения (например, свободный поток, синхронный поток, затор и т.д.). График 500 показывает определение системой помощи при смене полосы движения, является ли смена полос движения безопасной или небезопасной. Кроме того, график 500 показывает линию 502 интенсивности потока движения. Если смена полос движения является безопасной, линия 502 интенсивности потока движения возрастает. Наоборот, если смена полос движения является небезопасной, линия 502 интенсивности потока движения убывает. Если линия 502 интенсивности потока движения ниже порогового значения 504 в течение периода времени (например, тридцати секунд, одной минуты и т.д.), модуль 108 CACC определяет, что транспортные средства 100 и 102 находятся в синхронном потоке.
[0038] Фиг. 6 представляет собой структурную схему электронных компонентов 600 взаимодействующего транспортного средства 100, показанного на Фиг. 1. В проиллюстрированном примере электронные компоненты 600 включают в себя модуль 106 DSRC, модуль 108 CACC, датчики 602, электронные блоки 604 управления (ECU) и шину 606 передачи данных транспортного средства.
[0039] Модуль 108 CACC включает в себя процессор или контроллер 608 и память 610. Процессор или контроллер 608 может представлять собой любое подходящее устройство обработки или набор устройств обработки, таких как, но не ограничиваясь: микропроцессор, платформа на основе микроконтроллера, подходящая интегральная схема, одна или более программируемых пользователем вентильных матриц (FPGA) или одна или более интегральных схем специального назначения (ASIC). Память 610 может представлять собой энергозависимую память (например, RAM, которая может включать в себя энергонезависимую RAM, магнитную RAM, сегнетоэлектрическую RAM и любые другие подходящие формы); энергонезависимую память (например, дисковую память, флэш-память, EPROM, EEPROM, энергонезависимую твердотельную память на основе мемристора и т.д.), неизменную память (например, EPROM), постоянную память и/или устройства хранения большой емкости (например, накопители на жестких дисках, твердотельные накопители и т.д.). В некоторых примерах память 610 включает в себя множество типов памяти, в частности, энергозависимую память и энергонезависимую память.
[0040] Память 610 представляет собой машиночитаемый носитель, на котором могут быть воплощены один или более наборов инструкций, например, программное обеспечение для реализации способов в соответствии с настоящим изобретением. Инструкции могут воплощать один или более способов или логическую схему, которые описаны в настоящем документе. В конкретном варианте выполнения инструкции могут находиться полностью или по меньшей мере частично в любом одном или более из памяти 610, машиночитаемого носителя и/или в процессоре 608 при выполнении инструкций.
[0041] Выражения «не носящий временного характера машиночитаемый носитель» и «машиночитаемый носитель» следует понимать как включающие в себя один носитель или множество носителей, например, централизованную или распределенную базу данных, и/или связанные кэши и серверы, которые хранят один или более наборов инструкций. Выражения «не носящий временного характера машиночитаемый носитель» и «машиночитаемый носитель» также включают в себя любой материальный носитель, который выполнен с возможностью хранения, кодирования или переноса набора инструкций для выполнения процессором, или который побуждает систему к выполнению одного или более способов или операций, раскрытых в настоящем документе. В данном контексте выражение «машиночитаемый носитель» четко определено как включающее в себя любой тип машиночитаемого устройства хранения и/или накопителя на дисках и исключающее распространяющие сигналы.
[0042] Датчики 602 могут быть расположены во взаимодействующем транспортном средстве 100 и вокруг него любым подходящим образом. Датчики 602 могут быть установлены для измерения характеристик снаружи взаимодействующего транспортного средства 100. Кроме того, некоторые датчики 602 могут быть установлены в кабине взаимодействующего транспортного средства 100 или в кузове взаимодействующего транспортного средства 100 (например, в отсеке двигателя, колесных нишах и т.д.) для измерения характеристик внутри взаимодействующего транспортного средства 100. Например, такие датчики 602 могут включать в себя акселерометры, одометры, тахометры, датчики тангажа и рыскания, микрофоны, датчики давления в шинах, биометрические датчики и т.д. В проиллюстрированном примере датчики 602 включают в себя датчики 104 определения дальности. Датчики 602 также могут включать в себя, например, камеры и/или датчики скорости (например, датчики скорости колес, датчики приводного вала и т.д.).
[0043] ECU 604 отслеживают и управляют подсистемами взаимодействующего транспортного средства 100. ECU 604 сообщаются и обмениваются информацией по шине передачи данных транспортного средства (например, по шине 606 передачи данных транспортного средства). Кроме того, ECU 604 могут сообщать характеристики (например, состояние ECU 604, показания датчиков, состояние управления, коды ошибок и диагностические коды и т.д.) другим ECU 604 и/или принимать запросы от них. Некоторые взаимодействующие транспортные средства 100 могут иметь семьдесят или более ECU 604, расположенных в различных местах вокруг взаимодействующего транспортного средства 100, коммуникативно связанных шиной 606 передачи данных транспортного средства. ECU 604 представляют собой отдельные наборы электроники, которые включают в себя собственную схему (схемы) (например, интегральные схемы, микропроцессоры, память, хранилище и т.д.) и аппаратно-программное обеспечение, датчики, исполнительные устройства и/или установочное оборудование. В проиллюстрированном примере ECU 604 включают в себя части, которые позволяют модулю 108 CACC управлять связанными с движением функциями взаимодействующего транспортного средства 100, например, блок управления тормозами, блок управления дроссельной заслонкой, блок управления коробкой передач и блок управления рулевым управлением.
[0044] Шина 606 передачи данных транспортного средства коммуникативно связывает модуль 106 DSRC, модуль 108 CACC, датчики 602 и ECU 604. В некоторых примерах шина 606 передачи данных транспортного средства включает в себя одну или более шин передачи данных. Шина 606 передачи данных транспортного средства может быть реализована в соответствии с протоколом шины локальной сети контроллеров (CAN), который определен Международной организацией по стандартизации (ISO) 11898-1, протоколом шины передачи данных мультимедийных систем (MOST), протоколом шины CAN с изменяемой скоростью передачи данных (CAN-FD) (ISO 11898-7) и/или протоколом шины K-line (ISO 9141 и ISO 14230-1) и/или протоколом шины Ethernet™ IEEE 802.3 (начиная с 2002 года) и т.д.
[0045] Фиг. 7 представляет собой блок-схему способа упорядочивания дорожного движения через перекрытый участок 200 дороги 202. Первоначально на этапе 702 модуль 108 CACC одного или более взаимодействующих транспортных средств 100 обнаруживает синхронный поток движения. В некоторых примерах модуль 108 CACC обнаруживает синхронный поток движения, как описано на графиках 400 и 500 на рассмотренных выше Фиг. 4 и 5. На этапе 704 модуль 108 CACC устанавливает связь с другими взаимодействующими транспортными средствами 100 через модуль 106 DSRC. На этапе 706 модуль 108 CACC определяет местоположение перекрытого участка 200. В некоторых примерах модуль 108 CACC принимает местоположение в сообщении от взаимодействующего транспортного средства 100, которое преодолело перекрытый участок 200, и/или в уведомлении от навигационной системы. Альтернативно или дополнительно в некоторых примерах модуль 108 CACC оценивает местоположение на основе обнаружения перехода в синхронный поток. На этапе 708 модуль 108 CACC взаимодействует с другими взаимодействующими транспортными средствами 100 для формирования групп 204 со стандартными транспортными средствами 102. Примерный способ взаимодействия с другими взаимодействующими транспортными средствами 100 для формирования групп 204 со стандартными транспортными средствами 102 раскрыт ниже в отношении Фиг. 8. На этапе 710 модуль 108 CACC взаимодействует с другими взаимодействующими транспортными средствами 100 для перемещения групп 204 через перекрытый участок 200. Примерный способ взаимодействия с другими взаимодействующими транспортными средствами 100 для перемещения групп 204 через перекрытый участок 200 раскрыт ниже в отношении Фиг. 9.
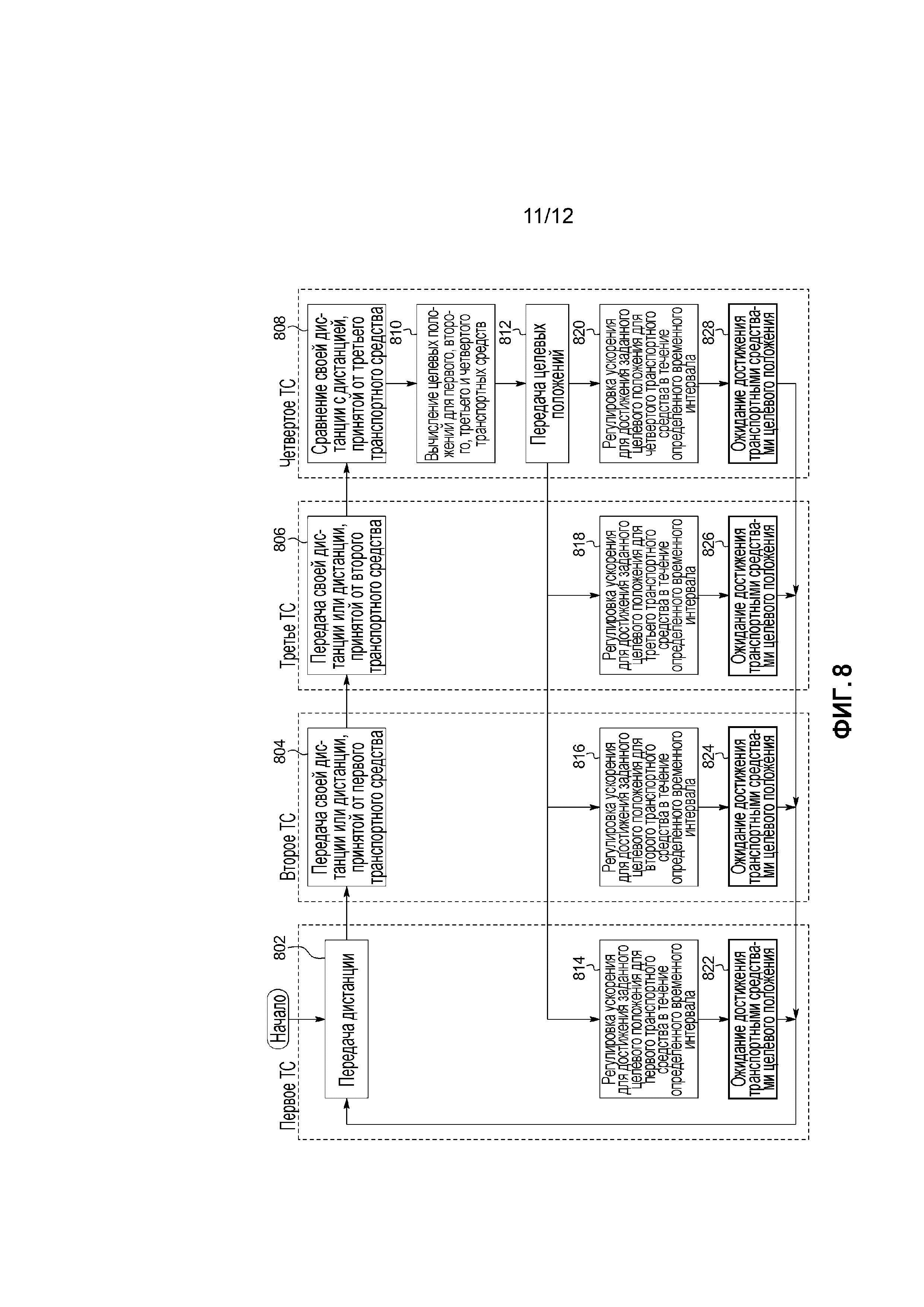
[0046] Фиг. 8 представляет собой блок-схему способа взаимодействия взаимодействующих транспортных средств 100, показанных на Фиг. 1, для упорядочивания дорожного движения через перекрытый участок 200. В проиллюстрированном примере способ включает в себя четыре взаимодействующих транспортных средства 100a-100d. Может быть использовано любое количество взаимодействующих транспортных средств 100. Первоначально на этапе 802 первое взаимодействующее транспортное средство 100a передает его местоположение и дистанцию. На этапе 804 второе взаимодействующее транспортное средство 100b передает (a) большую из его собственной дистанции или дистанции, принятой от первого взаимодействующего транспортного средства 100a, и (b) его местоположение и местоположение, принятое от первого взаимодействующего транспортного средства 100a. На этапе 806 третье взаимодействующее транспортное средство 100c передает (a) большую из его собственной дистанции или дистанции, принятой от второго взаимодействующего транспортного средства 100b, и (b) его местоположение и местоположения, принятые от второго взаимодействующего транспортного средства 100b. На этапе 808 четвертое взаимодействующее транспортное средство 100d сравнивает его собственную дистанцию с дистанцией, принятой от третьего взаимодействующего транспортного средства 100c. На этапе 810 четвертое взаимодействующее транспортное средство 100d определяет целевые положения взаимодействующих транспортных средств 100a-100d на основе (a) большей из дистанций, сравниваемых на этапе 808, и (b) местоположений взаимодействующих транспортных средств 100a-100d. На этапе 812 четвертое взаимодействующее транспортное средство 100d передает (a) целевые положения, определенные на этапе 810, и (b) временной интервал, в течение которого взаимодействующие транспортные средства 100a-100d должны достигнуть целевых положений. Способ продолжается на этапах 814, 816, 818 и 820.
[0047] На этапе 814 первое взаимодействующее транспортное средство 100a регулирует (например, увеличивает или уменьшает) его ускорение для достижения заданного целевого положения для первого взаимодействующего транспортного средства 100a в течение определенного временного интервала. На этапе 816 второе взаимодействующее транспортное средство 100b регулирует (например, увеличивает или уменьшает) его ускорение для достижения заданного целевого положения для второго взаимодействующего транспортного средства 100b в течение определенного временного интервала. На этапе 818 третье взаимодействующее транспортное средство 100c регулирует (например, увеличивает или уменьшает) его ускорение для достижения заданного целевого положения для третьего взаимодействующего транспортного средства 100c в течение определенного временного интервала. На этапе 820 четвертое взаимодействующее транспортное средство 100d регулирует (например, увеличивает или уменьшает) его ускорение для достижения заданного целевого положения для четвертого взаимодействующего транспортного средства 100d в течение определенного временного интервала. На этапах 822, 824 826 и 828 взаимодействующие транспортные средства 100a-100d ожидают достижения другими взаимодействующими транспортными средствами 100a-100d их соответственных целевых положений.
[0048] Фиг. 9 представляет собой блок-схему способа взаимодействия взаимодействующих транспортных средств 100, показанных на Фиг. 1, для перемещения группы 204 через перекрытый участок 200. Первоначально на этапе 902 модули 108 CACC участвующих взаимодействующих транспортных средств 100 выбирают участвующие взаимодействующие транспортные средства 100, которые находятся в положении (положениях), наиболее близком к перекрытому участку 200. На этапе 904 модули 108 CACC участвующих взаимодействующих транспортных средств 100 выбирают, какая группа (группы) 204 в положении (положениях), наиболее близком к перекрытому участку 200, должна перемещаться через перекрытый участок. Количество групп 204 для перемещения основано на количестве открытых полос движения через перекрытый участок 200. То, какая группа (группы) 204 в положении (положениях), наиболее близком к перекрытому участку 200, будет перемещаться, выбирается на основе, например, уменьшения среднего времени ожидания транспортных средств 100 и 102, которые должны преодолеть перекрытый участок 200. Способ продолжается на этапах 906 и 908.
[0049] На этапе 906 модули 108 CACC взаимодействуют, позволяя перемещение группы (групп) 204, выбранной на этапе 904, через перекрытый участок 200, во главе с соответствующим участвующим взаимодействующим транспортным средством (средствами) 100. Ведущее участвующее взаимодействующее транспортное средство (средства) 100 регулирует скорость группы (групп) 204 так, чтобы группа (группы) 204 преодолевала перекрытый участок 200 с постоянной скоростью. На этапе 908 модули 108 CACC взаимодействуют, позволяя перемещение группы (групп) 204, которая находится за группой (группами) 204, перемещающейся на этапе 906, для заполнения полосы движения, освободившейся после перемещения группы (групп) 204. Ведущее участвующее взаимодействующее транспортное средство (средства) 100 регулирует скорость группы (групп) 204 так, чтобы группа (группы) 204 перемещалась на освободившийся участок полосы (полос) движения, не позволяя стандартным транспортным средствам 102 из других групп 204 смещаться на освободившуюся полосу (полосы) движения. На этапе 910 модули 108 CACC ожидают, пока группа (группы) 204, перемещающаяся через перекрытый участок 200, и группа (группы) 204, перемещающаяся на освободившуюся полосу движения, не достигнут положения, позволяющего перемещение большего количества групп 204 через перекрытый участок 200. Затем способ возвращается на этап 902.
[0050] Блок-схемы на Фиг. 7, 8 и 9 являются репрезентативными для машиночитаемых инструкций, сохраненных в памяти (например, в памяти 610, показанной на Фиг. 6), которые содержат одну или более программ, которые при выполнении процессором (например, процессором 608, показанным на Фиг. 6) побуждают взаимодействующее транспортное средство 100 к реализации примерного модуля 108 CACC, показанного на Фиг. 1 и 6. Кроме того, хотя примерная программа (программы) описана со ссылкой на блок-схемы, проиллюстрированные на Фиг. 7, 8 и 9, альтернативно может быть использовано множество других способов реализации примерного модуля 108 CACC. Например, порядок выполнения этапов может быть изменен, и/или некоторые из описанных этапов могут быть изменены, опущены или объединены.
[0051] В настоящей заявке использование разделительных союзов предназначено для включения соединительных союзов. Использование единственного числа не предназначено для указания количества элементов. В частности, ссылка на «объект» предназначена для обозначения одного из возможного множества таких объектов. Кроме того, союз «или» может быть использован для передачи одновременно присутствующих признаков, а не взаимоисключающих альтернатив. Другими словами, союз «или» следует понимать как подразумевающий значение «и/или». Выражения «включает в себя», «включающий в себя» и «включают в себя» охватывают и имеют такой же объем и смысл, что и выражения «содержит», «содержащий» и «содержат» соответственно.
[0052] Вышеописанные варианты выполнения и, в частности, любые «предпочтительные» варианты выполнения представляют собой возможные примеры реализаций и изложены только для четкого понимания принципов изобретения. Множество изменений и модификаций может быть выполнено в вышеописанном варианте (вариантах) выполнения по существу без отклонения от замысла и принципов описанных в настоящем документе технологий. Все такие модификации должны быть включены в пределы объема охраны настоящего изобретения и защищены следующей далее формулой изобретения.
Корпус рулевой рейки с поперечными сужениями
Усовершенствованное прессовое соединение корпуса зубчатой рейки
Рулевой клапан с планетарной передачей
Способ управления двигателем, выполненным с возможностью работы на газообразном топливе, двигатель, имеющий цилиндры, выполненные с возможностью сжигания газообразного топлива и двигатель, выполненный с возможностью сжигания газообразного топлива
Способ проверки системы продувки паров транспортного средства, транспортное средство с гибридным приводом и способ проверки системы продувки паров на борту транспортного средства
Устройство и способ инжекционного формования вспененных полимеров
Транспортное средство (варианты)
Двигатель внутреннего сгорания с турбонагнетателем, приводная система и способ работы двигателя внутреннего сгорания с турбонагнетателем (варианты)
Блок цилиндров (варианты) и способ работы системы смазки в двигателе
Несущий каркас (варианты)
Автомобильный виртуальный датчик влажности
Транспортное средство, способ и система для планирования режимов транспортного средства с использованием изученных предпочтений пользователя
Транспортное средство, способ опознавания водителя и машиночитаемый носитель
Система и способ для контактирования с занимающими места людьми удаленного транспортного средства с использованием dsrc
Способ для оценивания влажности окружающей среды
Система планирования работы беспроводного маяка транспортного средства (варианты)
Определение позиции устройства в транспортном средстве
Система и способ привлечения внимания водителя транспортного средства
Головное транспортное средство, транспортное средство и способ для помощи на перекрестках с использованием специализированной связи на коротких расстояниях
Анализ данных от датчика частиц в транспортном средстве

