Результат интеллектуальной деятельности: СТЕНД ДЛЯ КОНТРОЛЯ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ГИБКОГО МАНИПУЛЯТОРА
Вид РИД
Изобретение
Изобретение относится к измерительной технике, а именно к устройствам проверки параметров контурных перемещений гибкого манипулятора, и может быть использовано для контроля углов изгиба, вектора ориентации и координаты положения дистального конца гибкого манипулятора.
Известен стенд для контроля точности контурных перемещений промышленного робота [RU 2472612 C1, МПК B25J19/00 (2006.01), опубл. 20.01.2013], содержащий манипулятор с закрепленным на фланце его последнего звена калибровочным инструментом, оканчивающимся сферой. Стенд также содержит систему управления манипулятором, измерительную аппаратуру и регистрирующую аппаратуру в виде персонального компьютера. В качестве измерительной аппаратуры использована оптическая измерительная система с видеокамерой, подключенной через аналого-цифровой преобразователь к персональному компьютеру. Видеокамера установлена с возможностью захвата всей рабочей зоны манипулятора. Сфера калибровочного инструмента выполнена диаметром, значение которого занесено в память персонального компьютера. Система управления манипулятором промышленного робота запрограммирована с возможностью изменения ориентации калибровочного инструмента в пространстве на максимально возможные углы, обусловленные кинематической схемой манипулятора, при размещении сферы калибровочного инструмента в разных секторах рабочей зоны манипулятора.
Известен стенд для контроля точности позиционирования дистального конца гибкого манипулятора [Li Z., Chiu P. W. Y., Du R. Design and kinematic modeling of a concentric wire-driven mechanism targeted for minimally invasive surgery //2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). – IEEE, 2016. – Р. 310-316], выбранный в качестве прототипа. Стенд содержит основание с направляющими, на которых размещена платформа. На платформе закреплен кронштейн, через который пропущена трубка. Один конец трубки соединен с основанием гибкого манипулятора. Другой конец трубки установлен в упор на платформе. К соответствующим звеньям гибкого манипулятора прикреплены концы нитей, другие концы которых присоединены к соответствующей шарико-винтовой паре. Каждая из четырех шарико-винтовая пара соединена с соответствующим шаговым двигателем, расположенным на платформе. Шаговые двигатели подключены к блоку управления
Перемещение дистального конца гибкого манипулятора фиксируют видеокамерой. Однако, полученное от одной видеокамеры изображение не позволяет определить пространственное положение дистального конца гибкого манипулятора, его ориентацию и траекторию перемещения в пространстве.
Техническим результатом предлагаемого изобретения является создание стенда для контроля контурных перемещений гибкого манипулятора, позволяющего увеличить информативность и точность контроля контурных перемещений.
Предложенный стенд для контроля контурных перемещений гибкого манипулятора, также как в прототипе, содержит основание с направляющими, на которых расположена платформа, трубку, один конец которой предназначен для соединения с основанием гибкого манипулятора, шарико-винтовую пару, соединенную с двигателем линейного перемещения, который подключен к блоку управления, оптическое средство контроля перемещений.
Согласно изобретению на основании расположены две профильные линейные направляющие с размещенными на них каретками, на которых установлена платформа. Между направляющими на опорах, прикрепленных к основанию, расположен ходовой винт с гайкой, к которой присоединена платформа. Конец ходового винта через муфту соединен с валом двигателя линейного перемещения, расположенным на основании. На платформе размещен каркас, на стенках которого закреплены шаговые двигатели, на валах которых установлены катушки. К торцу основания прикреплена камера в виде прямоугольного параллелепипеда, причем стенка камеры, обращенная к платформе, выполнена с отверстием в центральной части. В отверстие через втулку вставлена трубка, один конец которой установлен в упор, расположенный на каркасе, а другой конец трубки, расположенный внутри камеры, предназначен для закрепления основания гибкого манипулятора. При этом нити от звеньев гибкого манипулятора проведены через отверстие, втулку и прикреплены к соответствующим катушкам. Дно камеры, внутренние поверхности задней стенки и боковой стенки, смежной с основанием, выполнены контрастным цветом по отношению к цвету звеньев гибкого манипулятора. Передняя и верхняя стороны камеры, а также её боковая сторона, противоположная стенке, смежной с основанием, выполнены открытыми. На рёбрах верхней и передней сторон камеры размещены с возможностью перемещения реечные опоры. На каждой реечной опоре закреплена видеокамера. Видеокамеры подключены к компьютеру. Двигатель линейного перемещения и шаговые двигатели соединены с блоком управления, который подключен к компьютеру.
Использование двух видеокамер, расположенных взаимно перпендикулярно относительно друг друга, позволяет получить объемное графическое изображение контурных перемещений дистального конца гибкого манипулятора, что повышает информативность контроля. Окрашенные стенки камеры при видеосъемке позволяют получить четкое изображение гибкого манипулятора.
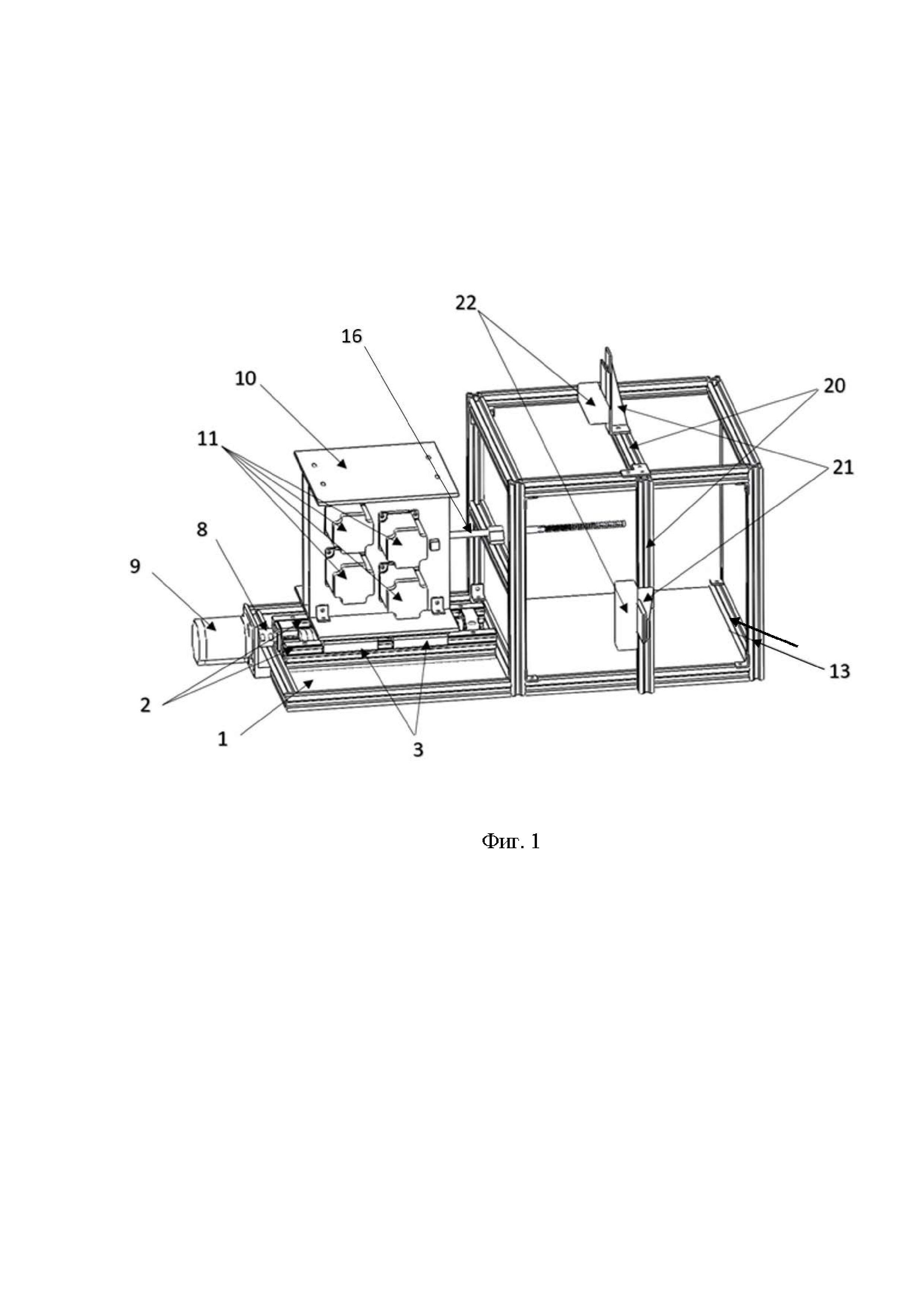
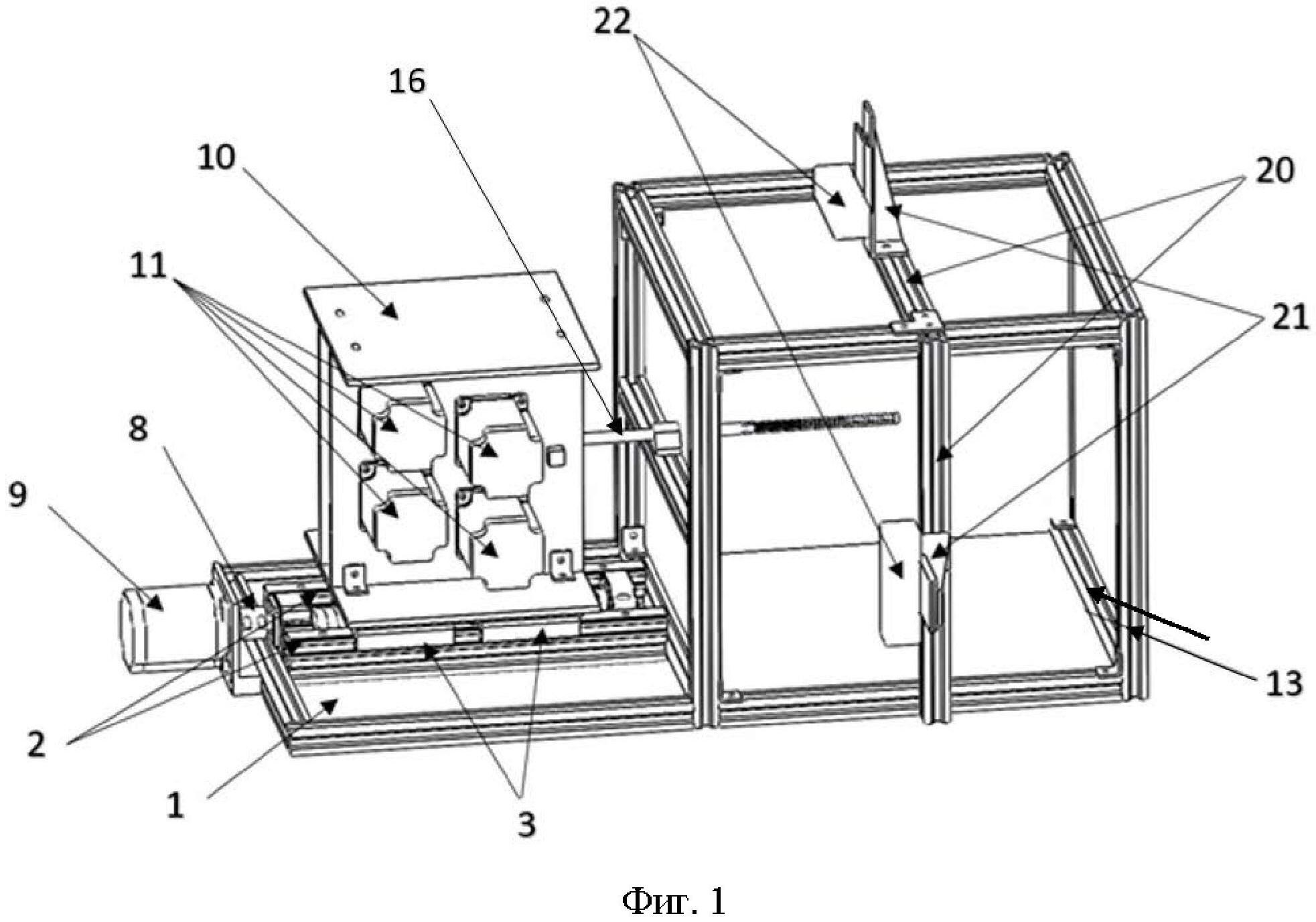
На фиг. 1 показан общий вид стенда для контроля контурных перемещений гибкого манипулятора.
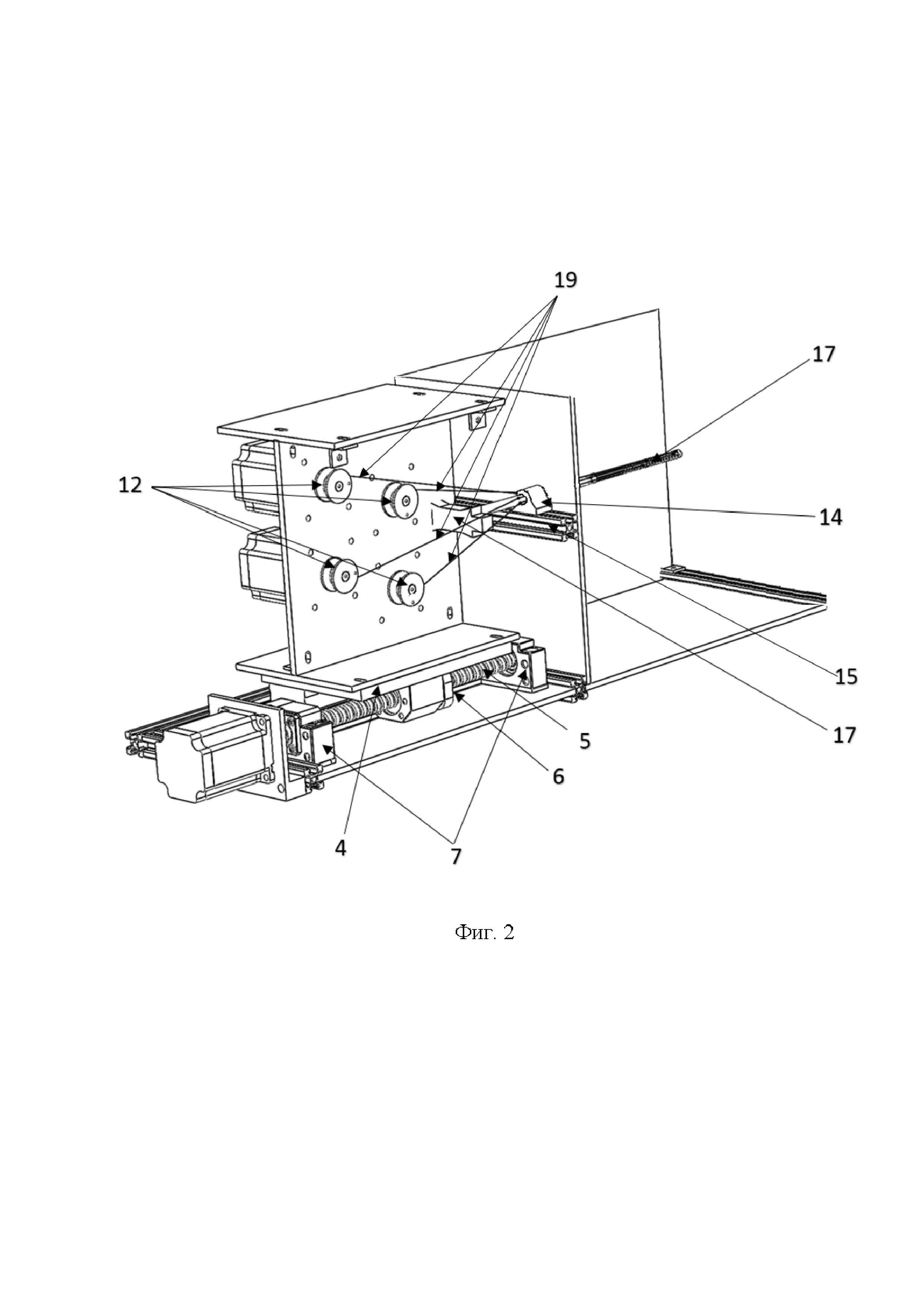
На фиг. 2 представлен фрагмент стенда.
На фиг. 3 представлено графическое изображение траекторий перемещения дистального конца гибкого манипулятора, где кривой серого цвета показано его перемещение по заданной модели, кривой черного цвета - действительное перемещение.
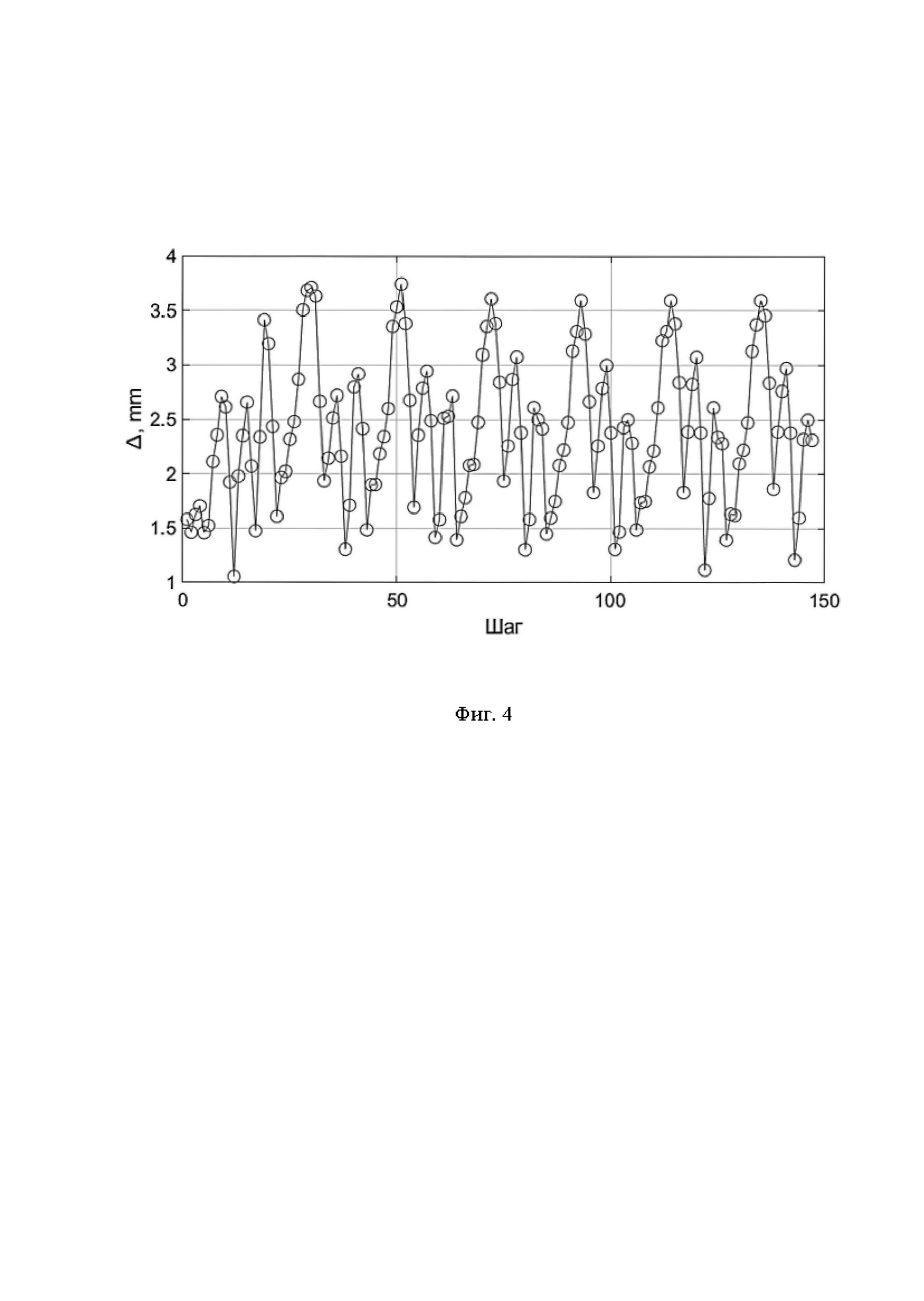
На фиг. 4 представлен график линейной ошибки позиционирования дистального конца гибкого манипулятора.
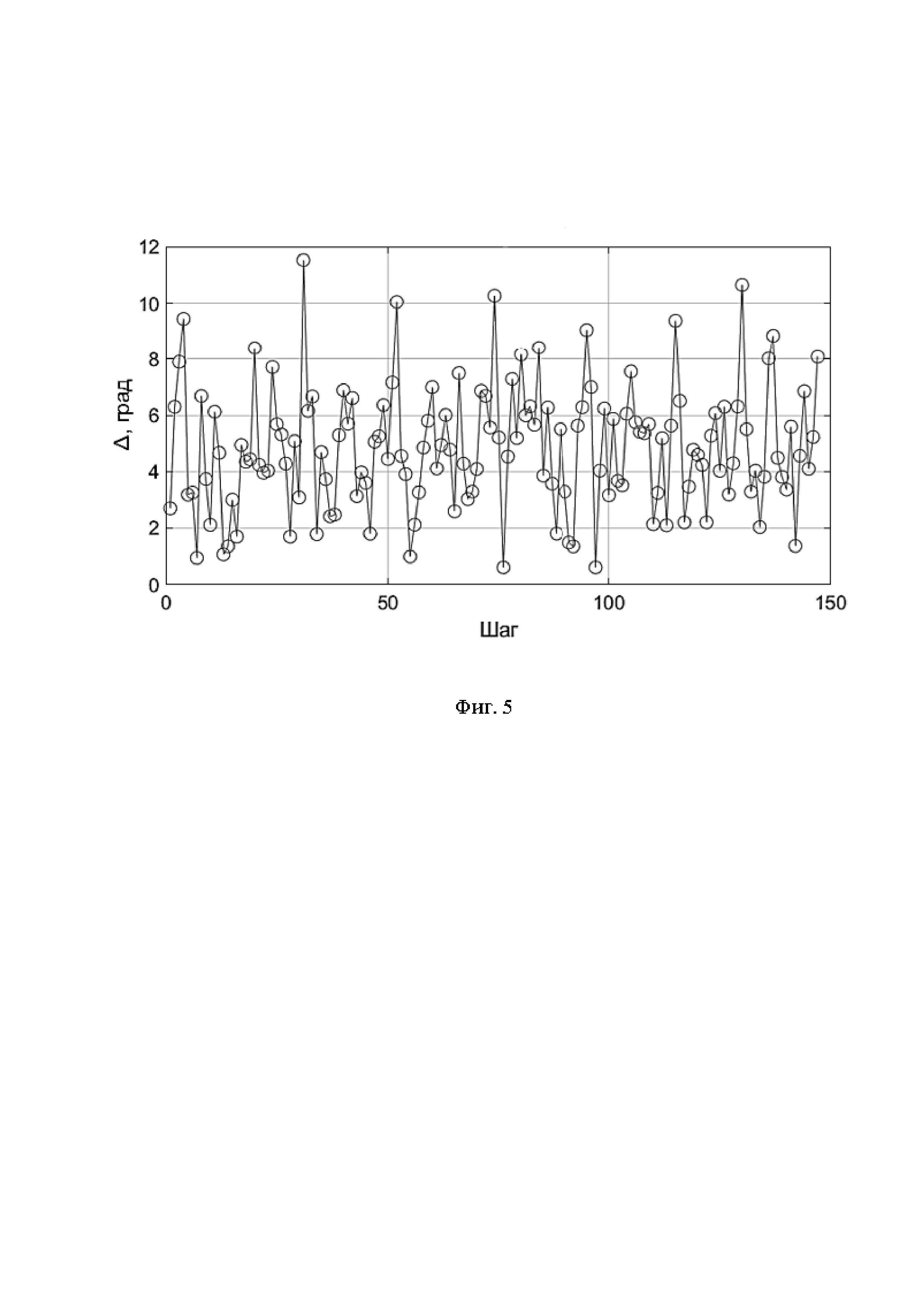
На фиг. 5 представлен график угловой ошибки позиционирования дистального конца гибкого манипулятора.
Стенд для контроля контурных перемещений дистального конца гибкого манипулятора содержит основание 1 (фиг. 1) с профильными линейными направляющими 2, на которых размещены каретки 3. На каретках 3 установлена платформа 4 (фиг. 2).
Между линейными направляющими расположен ходовой винт 5 с надетой на него ходовой гайкой 6. Ходовой винт 5 установлен на опорах 7, прикрепленных к основанию 1. Платформа 4 снизу соединена с ходовой гайкой 6. Один конец ходового винта 5 через муфту 8 (фиг. 1) соединен с валом двигателя линейного перемещения 9, расположенным в торце основания 1.
На платформе 4 размещен каркас 10, на двух вертикальных стенках которого закреплены восемь шаговых двигателей 11, на валах которых установлены катушки 12 (фиг. 2).
К другому торцу основания 1 (фиг. 1) прикреплена камера 13 в виде прямоугольного параллелепипеда. Стенка камеры 13, обращенная к платформе 4, выполнена с отверстием в центральной части. В отверстие через втулку 14 (фиг. 2), установленную на ребре жесткости 15 камеры 13 вставлена трубка 16. На конце трубки 16, расположенном внутри камеры 13, закреплено основание гибкого манипулятора 17. Другой конец трубки 16 установлен в упор 18, выполненный на каркасе 10.
К каждой катушке 12 прикреплен один конец нити 19. Нити 19 от восьми катушек 12 проведены через втулку 14 и закреплены другими концами на соответствующих звеньях гибкого манипулятора 17.
Дно камеры 13, внутренние поверхности задней и боковой стенки, смежной с основанием, выполнены контрастным цветом по отношению к цвету звеньев гибкого манипулятора 17. Передняя и верхняя стороны камеры 13, а также её боковая сторона, противоположная стенке, смежной с основанием 1, выполнены открытыми. На рёбрах верхней и передней сторон камеры 13 размещены с возможностью перемещения реечные опоры 20. На каждой опоре 20 на кронштейне 21 закреплена видеокамера 22. Обе видеокамеры 22 подключены к компьютеру.
Двигатель линейного перемещения 9 и шаговые двигатели 11 соединены с блоком управления, который посредством COM-порта подключен к компьютеру (на фиг. 1, 2 не показаны).
В программном обеспечении, установленном на компьютере, задают пространственное положение: изгиб, ориентацию и координаты точки позиционирования дистального конца гибкого манипулятора 17 внутри камеры 13. Через COM-порт в блок управления записывают данные об изменении длины нитей 19. С блока управления сигнал поступает на шаговые двигатели 11 и двигатель линейного перемещения 9. Шаговые двигатели 11, вращая катушки 12, натягивают или ослабляют нити 19, которые закреплены на элементах гибкого манипулятора 17. При этом гибкий манипулятор 17, принимая заданные углы изгиба, перемещается, ориентируется внутри камеры 13 и дистальный конец достигает заданной точки.
Одновременно вал двигателя линейного перемещения 9 через муфту 8 вращает ходовой винт 5, по которому передвигается ходовая гайка 6, перемещая платформу 4 на каретках 3 по профильным линейным направляющим 2. Платформа 4 перемещает каркас 10, вместе трубкой 16, в которой закреплено основание гибкого манипулятора 17, обеспечивая тем самым линейное перемещение гибкого манипулятора 17 внутри камеры 13.
Реечные опоры 20 фиксируют на ребрах верхней и передней стороны камеры 13 так, чтобы видеокамеры 22 были взаимно перпендикулярны и обеспечивали при видеосъемке захват всей области перемещения дистального конца гибкого манипулятора 17.
С помощью компьютера на полученных от видеокамер 2 плоских изображениях определяют среднюю линию гибкого манипулятора, представленную набором точек в трёхмерном пространстве, соединенных между собой сплайном, который характеризует тело гибкого манипулятора 17 (фиг. 3).
Оценку точности позиционирования дистального конца гибкого манипулятора 17 проводят с помощью программы, записанной в компьютере, путем сравнения точек действительного положения тела гибкого манипулятора, полученных после обработки изображений от видеокамер 22, с заданной моделью контурных перемещений дистального конца. В результате на экран компьютера выводят графическое изображение действительных перемещений гибкого манипулятора и заданной модели его перемещения (фиг. 3), а также графическую зависимость линейной и угловой ошибки перемещения дистального конца (фиг. 4 и 5). Линейная ошибка представляет собой кратчайшее расстояние между заданной на модели точки и действительной точки позиционирования дистального конца гибкого манипулятора 17. Угловую ошибку оценивают путем вычисления разницы отклонения вектора ориентации заданной модели и реально расположенного дистального конца гибкого манипулятора.
Стенд для контроля контурных перемещений гибкого манипулятора с нитяным приводным механизмом, содержащий основание и две видеокамеры, подключенные к компьютеру, отличающийся тем, что он снабжен камерой, расположенной на основании и выполненной в виде прямоугольного параллелепипеда, при этом в центральной части одной из боковых стенок камеры выполнено отверстие, в котором установлена втулка со вставленной в неё трубкой, один конец которой установлен в упор, а другой конец трубки, расположенный внутри камеры, выполнен с возможностью закрепления основания упомянутого гибкого манипулятора, причем втулка выполнена с возможностью прохождения через неё приводных нитей гибкого манипулятора, боковые стороны камеры, противолежащая и одна из смежных по отношению к боковой стенке с отверстием, в котором установлена втулка, и верхняя сторона камеры выполнены открытыми, а внутренние поверхности боковой стенки с отверстием, в котором установлена втулка, другой смежной с ней боковой стенки и дна камеры выполнены с контрастным цветом по отношению к цвету звеньев манипулятора, при этом на ребрах верхней и открытой боковой, смежной с упомянутой боковой стенкой с отверстием, сторон камеры размещены с возможностью перемещения две реечные опоры, на каждой из которых закреплена видеокамера.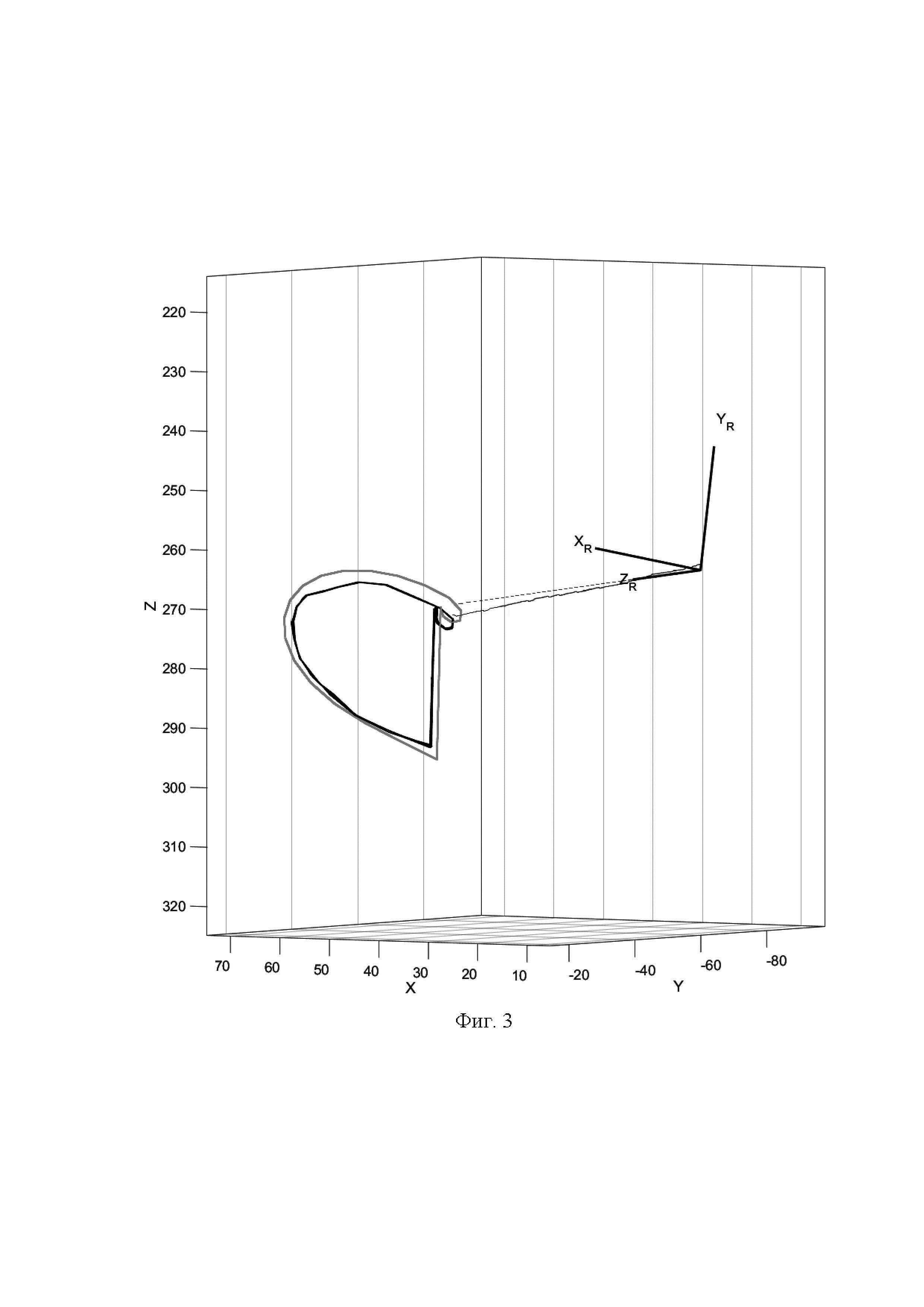
Арочное пролетное строение
Способ определения параметров асинхронного электродвигателя
Устройство для сжигания жидкого и газообразного топлива
Способ оценки эффективности защиты лимфоцитов от апоптоза
Способ получения влагостойкого композитного топлива из торфа
Способ обработки полых цилиндров
Тепловизионная система для проведения наружной тепловизионной съемки
Тепловизионный дефектоскоп
Ретрансляционный модуль для телеметрической системы с электромагнитным каналом связи
Устройство регистрации крутящего момента при вращательном и возвратно-вращательном движениях исполнительного органа
Боковая ручка управления (варианты)

