Результат интеллектуальной деятельности: СПОСОБ ПОМОЩИ ВОЖДЕНИЮ И УСТРОЙСТВО ПОМОЩИ ВОЖДЕНИЮ
Вид РИД
Изобретение
ОБЛАСТЬ ТЕХНИКИ
[0001] Раскрытие относится к способу помощи вождению и устройству помощи вождению, которые заставляют рассматриваемое транспортное средство двигаться, следуя за впередиидущим транспортным средством.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0002] Традиционно известно устройство помощи вождению для транспортного средства, обнаруживающее двухколесное транспортное средство в качестве впередиидущего транспортного средства, за которым следовать, отслеживает перемещение в направлении по ширине транспортного средства и подавляет ускорение при следовании при обнаружении автомобиля, идущего впереди двухколесного транспортного средства (см., например, патентный документ 1).
СПИСОК ЦИТИРУЕМОЙ ЛИТЕРАТУРЫ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003] Патентный документ 1: публикация заявки на патент Японии № 2004–265238.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004] Однако у традиционного устройства есть риск того, что, когда впередиидущее транспортное средство является двухколесным и следование по маршруту осуществляется путем следования за двухколесным транспортным средством, которое перемещается вбок на большую величину, чем четырехколесное транспортное средство, поведение рассматриваемого транспортного средства становится нестабильным и сильно нарушается из–за такого бокового перемещения.
[0005] Раскрытие было создано с акцентом на вышеупомянутую проблему, и его задача состоит в том, чтобы предоставить способ помощи вождению и устройство помощи вождению, которые подавляют боковое перемещение и делают поведение рассматриваемого транспортного средства стабильным, когда впередиидущее транспортное средство является двухколесным.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006] Чтобы решить вышеупомянутую задачу, раскрытие предлагает способ помощи вождению, который заставляет рассматриваемое транспортное средство (транспортное средство–хозяин) двигаться, следуя за впередиидущим транспортным средством. Способ помощи вождению включает в себя: определение того, присутствует ли или отсутствует впередиидущее транспортное средство у рассматриваемого транспортного средства, и, при определении того, что впередиидущее транспортное средство присутствует, осуществление определения типа впередиидущего транспортного средства с определением того, является ли впередиидущее транспортное средство у рассматриваемого транспортного средства четырехколесным или двухколесным; при впередиидущем транспортном средстве, являющемся четырехколесным, осуществление как управления разделяющим транспортные средства расстоянием до четырехколесного транспортного средства, так и следования по маршруту на основе четырехколесного транспортного средства; а при впередиидущем транспортном средстве, являющемся двухколесным, осуществление управления разделяющим транспортные средства расстоянием до двухколесного транспортного средства без осуществления следования по маршруту на основе двухколесного транспортного средства.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0007] Как описано выше, когда впередиидущее транспортное средство является двухколесным транспортным средством, управление разделяющим транспортные средства расстоянием до двухколесного транспортного средства осуществляют без осуществления следования по маршруту на основе двухколесного транспортного средства. Это позволяет подавить боковое перемещение и сделать поведение рассматриваемого транспортного средства стабильным, когда впередиидущее транспортное средство является двухколесным.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] [Фиг. 1] Фиг. 1 – это блок–схема конфигурации, иллюстрирующая систему помощи вождению, в которой применяются способ помощи вождению и устройство помощи вождению по варианту 1.
[Фиг. 2] Фиг. 2 – это блок-схема конфигурации, иллюстрирующая различные типы процесса управления в процессоре устройства планирования вождения, включенного в состав устройства помощи вождению по варианту 1.
[Фиг. 3] Фиг. 3 – блок–схема, иллюстрирующая последовательность операций процесса управления помощью вождению, выполняемую процессором устройства планирования вождения, включенного в состав устройства помощи вождению по варианту 1.
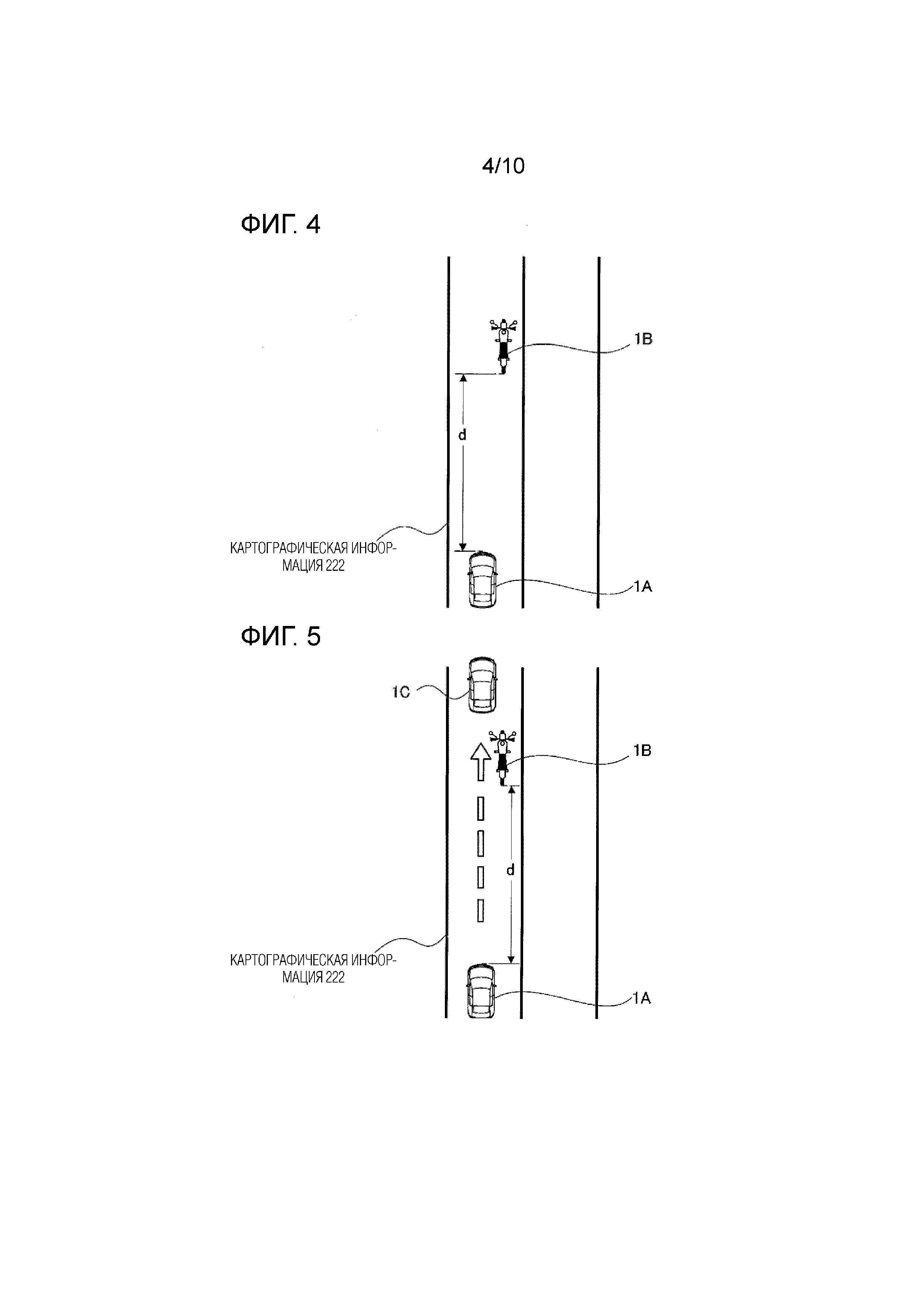
[Фиг. 4] Фиг. 4 – это поясняющий работу вид, дающий пример случая, когда устройство помощи вождению по варианту 1 заставляет рассматриваемое транспортное средство двигаться по дороге с одной полосой движения с каждой стороны, на которой отсутствует предшествующее впередиидущему транспортное средство, а впередиидущее транспортное средство является двухколесным.
[Фиг. 5] Фиг. 5 – это поясняющий работу вид, дающий пример случая, когда устройство помощи вождению по варианту 1 заставляет рассматриваемое транспортное средство двигаться по дороге с одной полосой движения с каждой стороны, на которой предшествующее впередиидущему транспортное средство является четырехколесным, а впередиидущее транспортное средство – двухколесным.
[Фиг. 6] Фиг. 6 – это блок–схема конфигурации, иллюстрирующая различные типы процесса управления в процессоре устройства планирования вождения, включенного в состав устройства помощи вождению по варианту 2.
[Фиг. 7] Фиг. 7 – блок–схема, иллюстрирующая последовательность операций процесса управления помощью вождению, выполняемую процессором устройства планирования вождения, включенного в состав устройства помощи вождению по варианту 2.
[Фиг. 8] Фиг. 8 – это поясняющий работу вид, дающий пример случая, когда устройство помощи вождению по варианту 2 заставляет рассматриваемое транспортное средство двигаться по дороге с одной полосой движения с каждой стороны, на которой впередиидущее транспортное средство является двухколесным.
[Фиг. 9] Фиг. 9 – это схема конфигурации блока, иллюстрирующая различные типы процесса управления в процессоре устройства планирования вождения, включенного в состав устройства помощи вождению по варианту 3.
[Фиг. 10] Фиг. 10 – блок–схема, иллюстрирующая последовательность операций процесса управления помощью вождению, выполняемую процессором устройства планирования вождения, включенного в состав устройства помощи вождению по варианту 3.
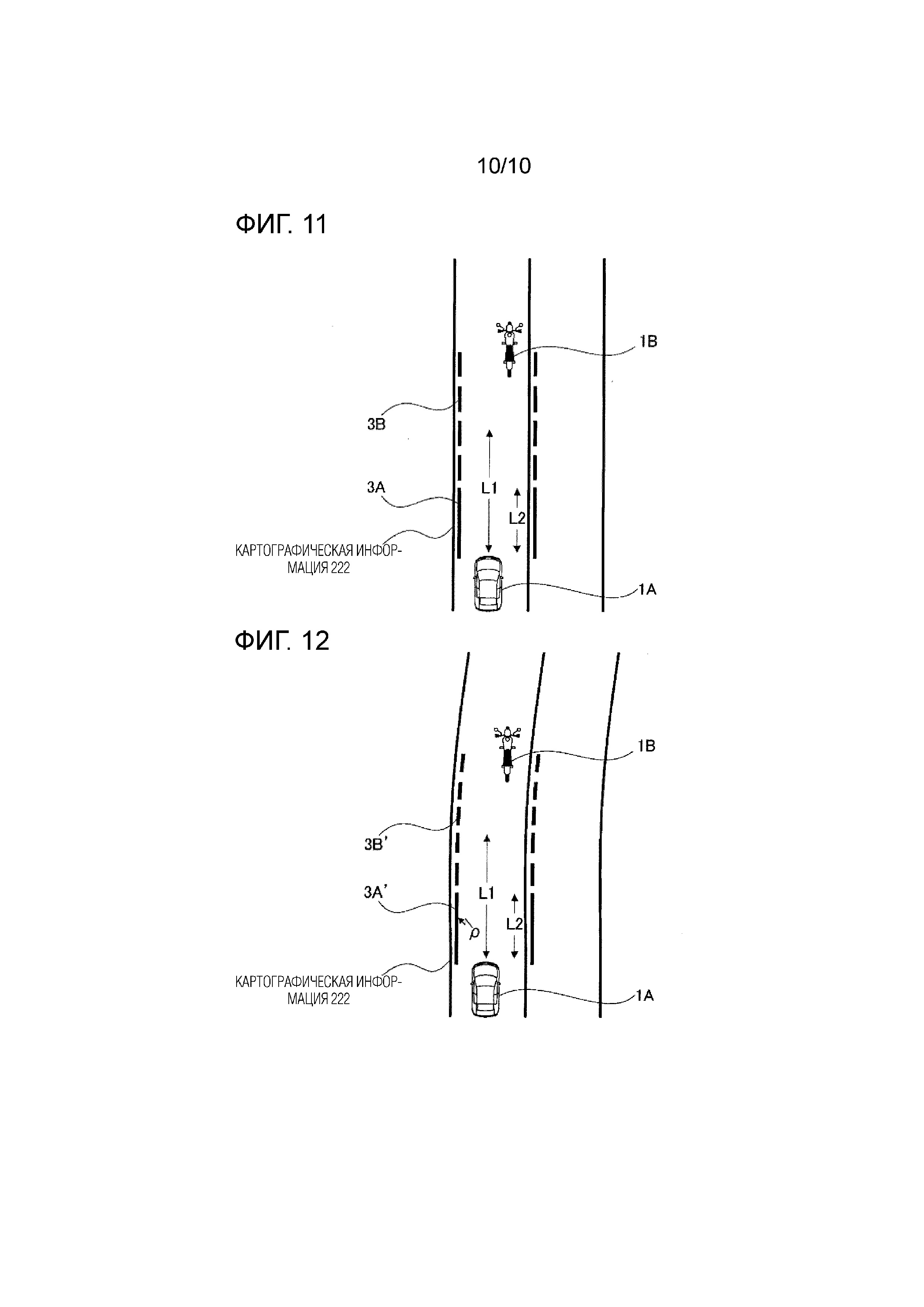
[Фиг. 11] Фиг. 11 – это поясняющий работу вид, дающий пример случая, когда устройство помощи вождению в варианте 3 заставляет рассматриваемое транспортное средство двигаться по прямому интерполированному маршруту на дороге с одной полосой движения с каждой стороны, на которой впередиидущее транспортное средство является двухколесным.
[Фиг. 12] Фиг. 12 – поясняющий работу вид, дающий пример случая, когда устройство помощи вождению в варианте 3 заставляет рассматриваемое транспортное средство двигаться по изогнутому интерполированному маршруту на дороге с одной полосой движения с каждой стороны, на которой впередиидущее транспортное средство является двухколесным.
Описание вариантов осуществления
[0009] Наилучшие варианты реализации способа помощи вождению и устройства помощи вождению согласно раскрытию описаны ниже на основе вариантов 1–3, проиллюстрированных на чертежах.
Вариант 1
[0010] Сначала описывается конфигурация. Способ помощи вождению и устройство помощи вождению в варианте 1 представляют собой способ и устройство, применяемые к транспортному средству автоматического вождения с системой помощи вождению, автоматически управляющей рулением/вождением/торможением на основе выбора режима автоматического вождения. В последующем описании конфигурация варианта 1 описана в отдельных разделах «Общая конфигурация системы», «Подробная конфигурация устройства планирования вождения» и «Конфигурация процесса управления помощью вождению».
Общая конфигурация системы
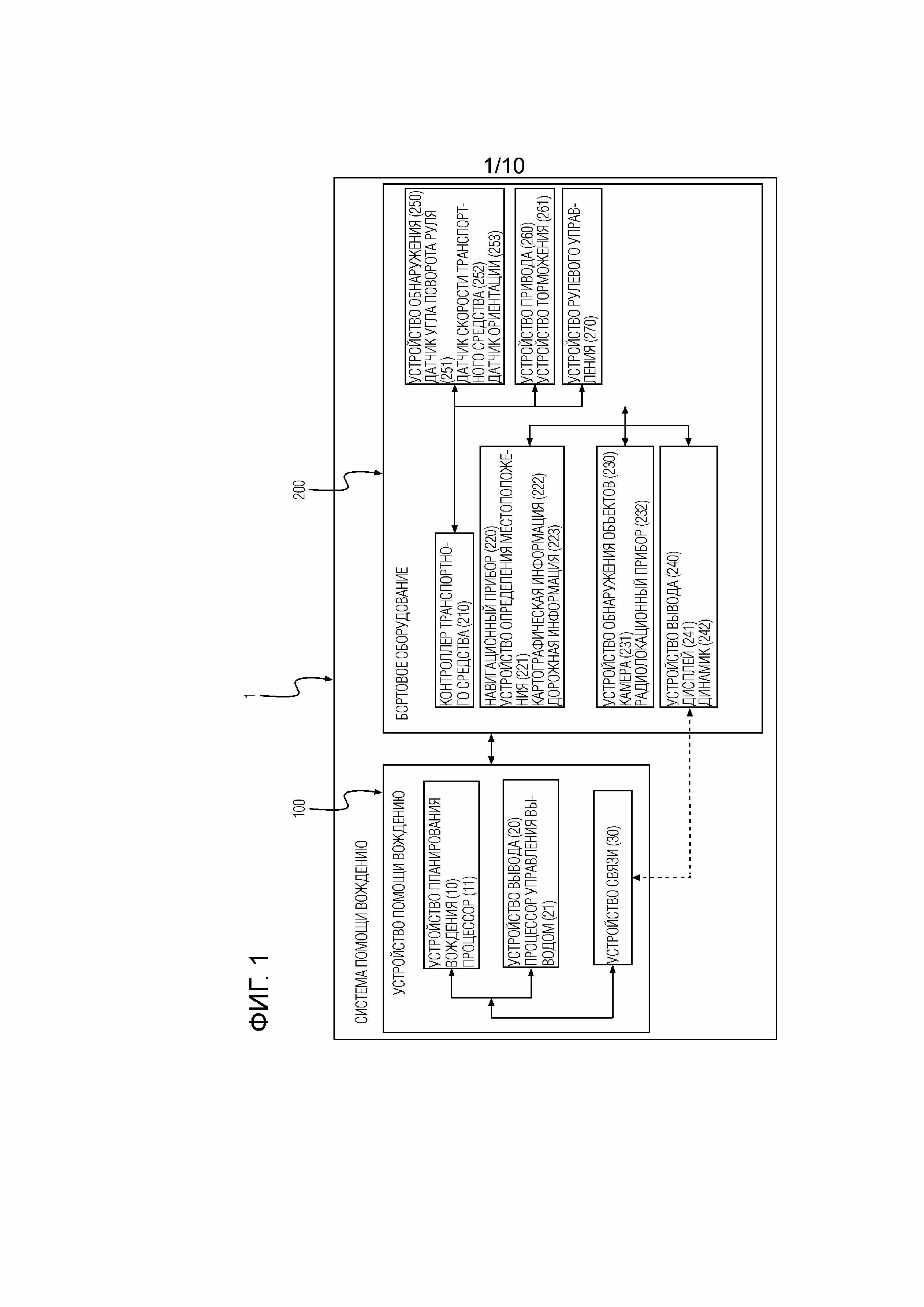
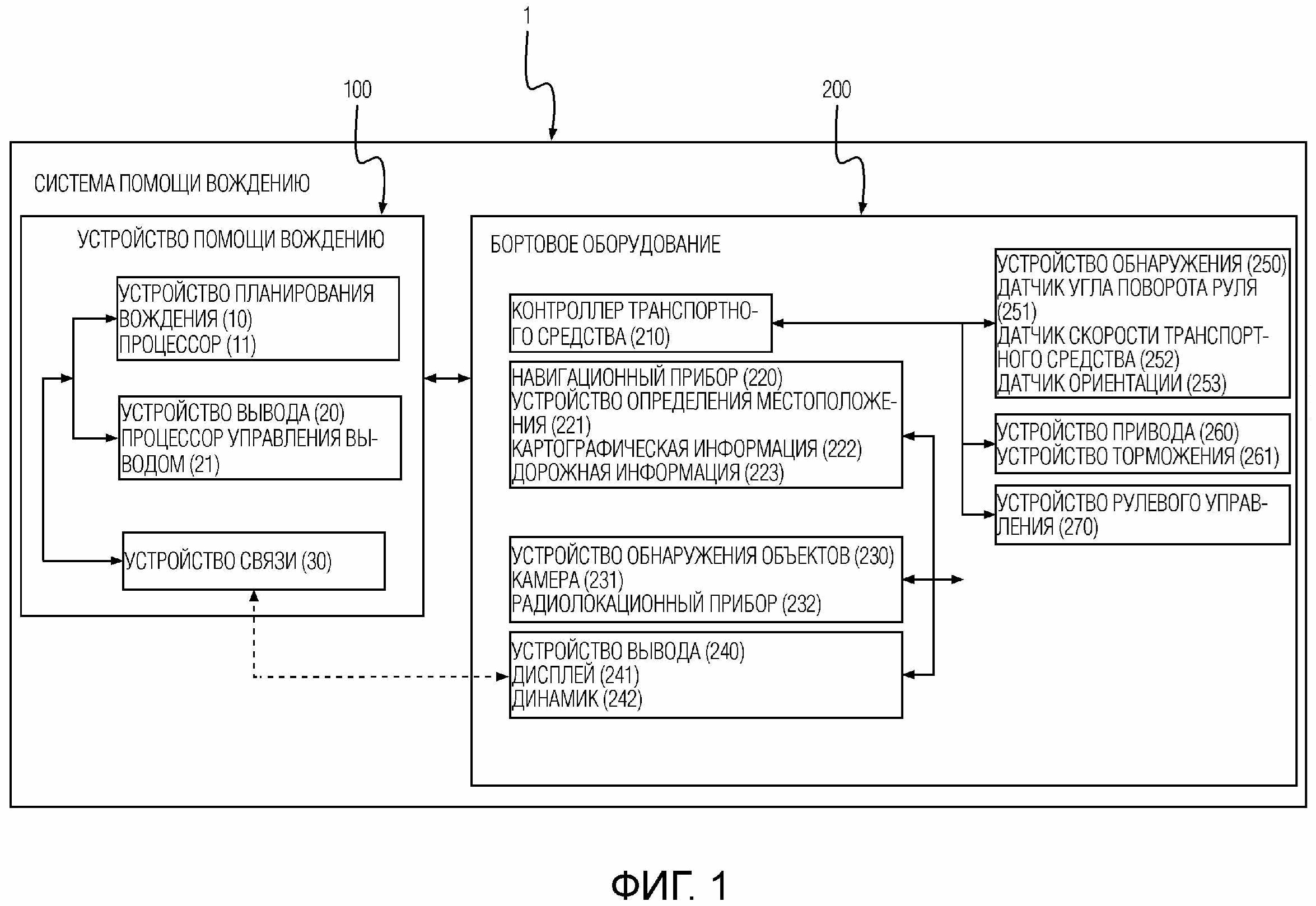
[0011] Фиг. 1 – это блок–схема конфигурации, иллюстрирующая систему помощи вождению, в которой применяются способ помощи вождению и устройство помощи вождению по варианту 1. Общая конфигурация системы описана ниже на основе фиг. 1.
[0012] Как показано на фиг. 1, система 1 помощи вождению включает в себя устройство 100 помощи вождению и бортовое оборудование 200. Следует отметить, что система 1 помощи вождению, устройство 100 помощи вождению, бортовое оборудование 200 и различные устройства и приборы, входящие в состав этих системы и устройств, являются компьютерами, которые включают в себя устройства арифметической обработки, такие как центральные процессоры (ЦП), и которые выполняют арифметическую обработку.
[0013] Сначала описывается бортовое оборудование 200. Бортовое оборудование 200 включает в себя контроллер 210 транспортного средства, навигационный прибор 220, устройство 230 обнаружения объектов и устройство 240 вывода. Эти устройства, которые образуют бортовое оборудование 200, соединены друг с другом посредством местной контроллерной сети (CAN) или другой локальной сети (LAN) в транспортном средстве для обмена информацией друг с другом. Бортовое оборудование 200 может обмениваться информацией с устройством 100 помощи вождению через LAN в транспортном средстве.
[0014] Контроллер 210 транспортного средства представляет собой бортовой компьютер, такой как блок управления двигателем (ECU), и электронным образом управляет вождением транспортного средства. В качестве примеров транспортного средства могут быть приведены электрический автомобиль (электромобиль), включающий в себя электродвигатель в качестве источника движущего привода, автомобиль с двигателем внутреннего сгорания в качестве источника движущего привода, и гибридный автомобиль, включающий в себя и электродвигатель, и двигатель внутреннего сгорания в качестве источника движущего привода. Следует отметить, что электромобиль и гибридный автомобиль, которые используют электродвигатель в качестве источника движущего привода, также включают в себя автомобили того типа, которые используют вторичный химический источник тока (ХИТ) в качестве источника электропитания электродвигателя, и автомобили того типа, которые используют топливный элемент в качестве источника электропитания электродвигателя. Кроме того, контроллер 210 транспортного средства заставляет работать устройство 250 обнаружения, устройство 260 привода и устройство 270 рулевого управления.
[0015] Устройство 250 обнаружения включает в себя датчик 251 угла поворота руля, датчик 252 скорости транспортного средства и датчик 253 ориентации. Датчик 251 угла поворота руля обнаруживает информацию, такую как величина поворота руля, скорость поворота рулевого управления и ускорение поворота руля, и выдает эту информацию контроллеру 210 транспортного средства. Датчик 252 скорости транспортного средства детектирует скорость и/или ускорение транспортного средства и выдает эти скорость и/или ускорение контроллеру 210 транспортного средства. Датчик 253 ориентации детектирует пространственное положение транспортного средства, угол наклона (тангажа) транспортного средства, угол рыскания транспортного средства и угол крена транспортного средства и выдает их контроллеру 210 транспортного средства. Датчик 253 ориентации включает в себя гироскопический датчик (гиродатчик).
[0016] Устройство 260 привода включает в себя приводные механизмы рассматриваемого транспортного средства. Приводные механизмы включают в себя электродвигатель и/или двигатель внутреннего сгорания, которые являются описанным выше источником движущего привода, устройство передачи мощности, которое включает в себя ведущий вал и автоматическую коробку передач, которые передают выходную мощность от источника движущего привода на ведущие колеса, устройство 261 торможения, которое осуществляет торможение колес, и тому подобное. Устройство 260 привода генерирует управляющие сигналы для этих приводных механизмов на основе входных сигналов, вводимых при операции ускорения и операции торможения, и на основе управляющих сигналов, получаемых от контроллера 210 транспортного средства и устройства 100 помощи вождению, и осуществляет управление движением, включая ускорение и замедление транспортное средство. Управление движением, включая ускорение и замедление транспортного средства, может быть осуществлено автоматически путем отправки управляющей информации в устройство 260 привода. Следует отметить, что в гибридном автомобиле распределение крутящих моментов, выводимых соответственно на электродвигатель и двигатель внутреннего сгорания в зависимости от состояния движения транспортного средства, также отправляется в устройство 260 привода.
[0017] Устройство 270 рулевого управления включает в себя рулевой привод. Рулевой привод включает в себя двигатель, прикрепленный к валу рулевой колонки. Устройство 270 рулевого управления выполняет управление изменением направления движения транспортного средства на основании управляющего сигнала, полученного от контроллера 210 транспортного средства, или входного сигнала, введенного при операции рулевого управления. Контроллер 210 транспортного средства отправляет управляющую информацию, включающую в себя величину поворота руля, в устройство 270 рулевого управления, чтобы выполнять управление рулевым управлением рассматриваемого транспортного средства так, что рассматриваемое транспортное средство движется по маршруту движения. Кроме того, устройство 100 помощи вождению может управлять величиной торможения каждого колеса транспортного средства, чтобы управлять направлением движения транспортного средства. В этом случае контроллер 210 транспортного средства отправляет управляющую информацию, включающую в себя величину торможения каждого колеса, в устройство 261 торможения для управления направлением движения транспортного средства. Следует отметить, что управление устройством 260 привода и управление устройством 270 рулевого управления могут быть осуществлены полностью автоматически или осуществлены в режиме содействия операции вождения (операции движения) водителем. Управление устройством 260 привода и управление устройством 270 рулевого управления могут быть прерваны или отменены вмешательством водителя. Контроллер 210 транспортного средства управляет вождением рассматриваемого транспортного средства в соответствии с планом вождения устройства 10 планирования вождения.
[0018] Бортовое оборудование 200 включает в себя навигационный прибор 220, устройство 230 обнаружения объектов и устройство 240 вывода.
[0019] Навигационный прибор 220 рассчитывает маршрут от текущего положения рассматриваемого транспортного средства до пункта назначения. В качестве метода расчета маршрута может использоваться метод, основанный на теории поиска графов и известный на момент подачи заявки, такой как алгоритм Дейкстры или A*. Рассчитанный маршрут отправляется контроллеру 210 транспортного средства для того, чтобы он использовался для помощи вождению рассматриваемого транспортного средства. Рассчитанный маршрут выводится через устройство 240 вывода в качестве информации о направлении маршрута. Навигационный прибор 220 включает в себя устройство 221 определения местоположения, доступную картографическую информацию 222 и дорожную информацию 223. Следует отметить, что картографическая информация 222 и дорожная информация 223 должны лишь быть доступными для чтения навигационным прибором 220 и могут быть сконфигурированы физически отдельными от навигационного прибора 220 или сохранены на сервере, читаемом через устройство 30 связи (или устройство связи, предусмотренное в бортовом оборудовании 200).
[0020] Устройство 221 определения местоположения включает в себя Глобальную систему позиционирования (GPS) и обнаруживает положение движения (широта, долгота) движущегося рассматриваемого транспортного средства.
[0021] Картографическая информация 222 является так называемой электронной картой и представляет собой информацию, в которой широты и долготы связаны с картографической информацией. Картографическая информация 222 включает в себя дорожную информацию 223, связанную с различными точками.
[0022] Дорожная информация 223 определяется узлами и связями, соединяющими эти узлы. Дорожная информация 223 включает в себя идентифицирующую дороги информацию на основе местоположений/регионов дорог, типов соответствующих дорог, ширины соответствующих дорог и информации о форме дорог. Дорожная информация 223 хранит положение перекрестка, направление въезда на перекресток, тип перекрестка и другую относящуюся к перекрестку информацию, в сочетании с идентификационной информацией о каждой дорожной связи (соединении дорог). Кроме того, дорожная информация 223 хранит информацию о типе дороги, ширине дороги, форме дороги, разрешено ли транспортному средству движение прямо, соотношение приоритетов при движении, разрешен ли обгон (разрешен ли или нет заезд на соседнюю полосу движения), и другую относящуюся к дорогам информацию, в сочетании с идентификационной информацией о каждой дорожной связи.
[0023] Навигационный прибор 220 определяет маршрут движения, по которому движется рассматриваемое транспортное средство, на основании текущего положения рассматриваемого транспортного средства, обнаруженного устройством 221 определения местоположения. Маршрут движения – это запланированный маршрут движения рассматриваемого транспортного средства и/или прошлый маршрут движения рассматриваемого транспортного средства. Маршрут движения может быть маршрутом к пункту назначения, указанному пользователем, или маршрутом к пункту назначения, оцененным на основании предыстории движения рассматриваемого транспортного средства/пользователя. Маршрут движения, по которому движется рассматриваемое транспортное средство, может быть определен для каждой дороги, для каждой дороги, на которой указаны направления въезда и выезда, или для каждой полосы, в которой фактически движется рассматриваемое транспортное средство. Навигационный прибор 220 определяет дорожные связи для соответствующих полос движения на маршруте движения, по которому движется рассматриваемое транспортное средство, путем обращения к дорожной информации 223, что будет описано позже.
[0024] Маршрут движения включает в себя идентификационную информацию (информацию о координатах) одной или множественных точек, которые рассматриваемое транспортное средство пройдет в будущем. Маршрут движения включает в себя по меньшей мере одну точку, указывающую следующее положение движения, куда должно двигаться рассматриваемое транспортное средство. Маршрут движения может быть образован из непрерывных линий или дискретных точек. Маршрут движения идентифицируется идентификатором дороги, идентификатором полосы движения и идентификатором дорожной связи, хотя не ограничен этой конфигурацией. Эти идентификатор дороги для транспорта, идентификатор полосы движения и идентификатор дорожной связи заданы в картографической информации 222 и дорожной информации 223.
[0025] Устройство 230 обнаружения объектов является устройством, которое обнаруживает состояние вокруг рассматриваемого транспортного средства и обнаруживает присутствие объектов, включая препятствия, имеющиеся вокруг рассматриваемого транспортного средства, и те положения, где эти объекты присутствуют. Устройство 230 обнаружения объектов включает в себя камеру 231 и радиолокационный прибор 232, хотя не ограничивается этой конфигурацией.
[0026] Камера 231 представляет собой устройство формирования изображений, включающее в себя элемент формирования изображений, такой как, например, прибор с зарядовой связью (ПЗС), и может представлять собой инфракрасную камеру или стереокамеру. Камера 231 установлена в заданном месте в рассматриваемом транспортном средстве и захватывает изображения объектов в зоне вокруг рассматриваемого транспортного средства. Зона вокруг рассматриваемого транспортного средства включает в себя переднюю, заднюю, левую и правую стороны рассматриваемого транспортного средства. Объекты включают двумерные знаки, такие как линия остановки (стоп-линия), проведенная на поверхности дороги. Объекты включают в себя трехмерные объекты. Объекты включают в себя неподвижные (стационарные) объекты, такие как дорожный знак. Объекты включают в себя движущиеся объекты, такие как пешеход, двухколесное транспортное средство и четырехколесное транспортное средство (другое транспортное средство). Объекты включают дорожные конструкции, такие как ограждение, разделительная полоса и бордюр.
[0027] Устройство 230 обнаружения объектов анализирует данные изображения и идентифицирует тип каждого объекта на основе результата этого анализа. Устройство 230 обнаружения объектов определяет, является ли каждый из входящих в данные изображения объектов транспортным средством, пешеходом или дорожным знаком, используя метод сопоставления с образцом и т.п. Устройство 230 обнаружения объектов обрабатывает полученные данные изображения и получает расстояние от рассматриваемого транспортного средства до каждого из объектов, присутствующих вокруг рассматриваемого транспортного средства, на основании положения объекта. В частности, устройство 230 обнаружения объектов получает взаимное расположение каждого объекта и рассматриваемого транспортного средства.
[0028] В качестве радиолокационного прибора 232 может использоваться радар, такой как радар миллиметрового диапазона, лазерный радар, ультразвуковой радар или лазерный дальномер, использующий метод, известный на момент подачи заявки. Устройство 230 обнаружения объектов обнаруживает присутствие объекта, положение объекта и расстояние до объекта на основе сигнала приема радиолокационного прибора 232. Устройство 230 обнаружения объектов обнаруживает присутствие объекта, положение объекта и расстояние до объекта на основе результата кластеризации информации облака точек, полученной лазерным радаром.
[0029] Устройство 240 вывода включает в себя дисплей 241 и динамик 242. Устройство 240 вывода выводит относящуюся к помощи вождению информацию различных типов пользователю или пассажиру транспортного средства в зоне вокруг рассматриваемого транспортного средства. Устройство 240 вывода выводит информацию, относящуюся к подготовленному плану действий при вождении и управлению движением на основе этого плана действий при вождении. Устройство 240 вывода заранее уведомляет пассажира рассматриваемого транспортного средства о выполнении операции руления и ускорения и замедления через дисплей 241 и динамик 242 в качестве информации, зависящей от управляющей информации, используемой для того, чтобы заставить рассматриваемое транспортное средство двигаться по маршруту движения (целевому маршруту). Кроме того, устройство 240 вывода может заранее уведомлять пассажира рассматриваемого транспортного средства или пассажира другого транспортного средства об информации, относящейся к помощи вождению, посредством лампы вне кабины транспортного средства или лампы внутри кабины транспортного средства. Кроме того, устройство 240 вывода может выдавать относящуюся к помощи вождению информацию различных типов во внешнее устройство, такое как интеллектуальная транспортная система, через устройство связи. Кроме того, когда маршрут движения корректируется, устройство вывода может выводить информацию о корректировке маршрута движения и скорректированном маршруте движения.
[0030] Далее описано устройство 100 помощи вождению. Как показано на фиг. 1, устройство 100 помощи вождению включает в себя устройство 10 планирования вождения, устройство 20 вывода и устройство 30 связи.
[0031] Устройство 10 планирования вождения включает в себя процессор 11, который функционирует как устройство управления устройством 10 планирования вождения. В частности, процессор 11 представляет собой компьютер, включающий в себя: постоянное запоминающее устройство (ПЗУ), в котором хранится программа для выполнения процесса определения присутствия-отсутствия впередиидущего транспортного средства, процесса управления разделяющим транспортные средства расстоянием, процесса следования по маршруту впередиидущего транспортного средства, процесса получения маршрута впередиидущего транспортного средства и процесса управления следованием по маршруту; центральный процессор (ЦП), который является операционной схемой, выполненной с возможностью функционирования в качестве устройства 10 планирования вождения посредством выполнения сохраненной в ПЗУ программы; и оперативное запоминающее устройство (ОЗУ), которое функционирует в качестве доступного запоминающего устройства. Другими словами, процессор 11 выполняет функцию осуществления процесса определения присутствия-отсутствия впередиидущего транспортного средства, процесса определения типа впередиидущего транспортного средства, процесса управления разделяющим транспортные средства расстоянием и процесса следования по маршруту впередиидущего транспортного средства.
[0032] Устройство 20 вывода имеет функцию, аналогичную устройству 240 вывода бортового оборудования 200, описанного выше. Дисплей 241 и динамик 242 используются в качестве вариантов выполнения устройства 20 вывода. Устройство 10 планирования вождения и устройство 20 вывода могут обмениваться информацией по проводной или беспроводной линии связи.
[0033] Устройство 30 связи обменивается информацией с бортовым оборудованием 200, обменивается информацией в устройстве 100 помощи вождению и обменивается информацией с внешним окружением системы 1 помощи вождению.
Подробная конфигурация устройства планирования вождения
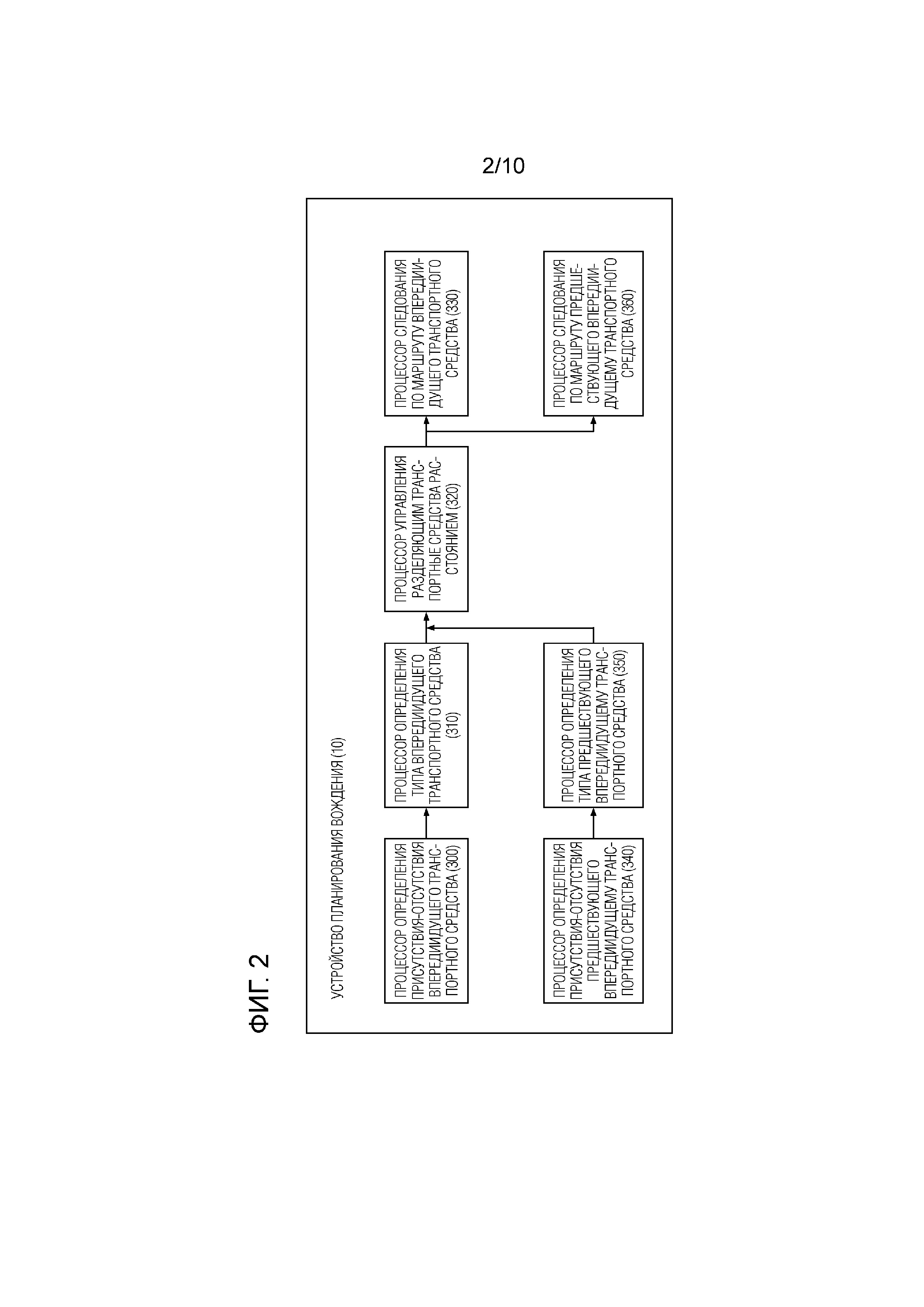
[0034] Фиг. 2 – это блок–схема конфигурации, иллюстрирующая различные типы процесса управления в процессоре 11 устройства 10 планирования вождения, включенного в состав устройства 100 помощи вождению по варианту 1. Подробная конфигурация устройства 10 планирования вождения описана ниже на основе фиг. 2. Следует отметить, что различные типы процесса управления в процессоре 11 могут применяться не только к дороге с одной полосой движения с каждой стороны, но и к другим дорожным условиям, таким как дорога с двумя полосами движения с каждой стороны.
[0035] Как показано на фиг. 2, устройство 10 планирования вождения включает в себя процессор 300 определения присутствия-отсутствия впередиидущего транспортного средства, процессор 310 определения типа впередиидущего транспортного средства, процессор 320 управления разделяющим транспортные средства расстоянием, процессор 330 следования по маршруту впередиидущего транспортного средства, процессор 340 определения присутствия-отсутствия предшествующего впередиидущему транспортного средства, процессор 350 определения типа предшествующего впередиидущему транспортного средства и процессор 360 следования по маршруту предшествующего впередиидущему транспортного средства.
[0036] Процессор 300 определения присутствия-отсутствия впередиидущего транспортного средства определяет, присутствует ли или отсутствует впередиидущее транспортное средство. Процессор 300 определения присутствия-отсутствия впередиидущего транспортного средства определяет, присутствует ли или отсутствует впередиидущее транспортное средство, определяя, присутствует ли или отсутствует какое-то транспортное средство перед рассматриваемым транспортным средством 1А в той же полосе, что и рассматриваемое транспортное средство 1А, на данных карты. Следует отметить, что, хотя конкретный способ обработки в процессе определения присутствия-отсутствия впередиидущего транспортного средства подробно не описан, например, может использоваться метод определения, известный на момент подачи заявки. В варианте 1 в качестве впередиидущего транспортного средства обнаруживается двухколесное транспортное средство 1B (см. фиг. 4 и 5). Когда процессор 300 определения присутствия-отсутствия впередиидущего транспортного средства определяет, что впередиидущее транспортное средство присутствует, осуществляется процесс определения типа впередиидущего транспортного средства.
[0037] Процессор 310 определения типа впередиидущего транспортного средства определяет, является ли впередиидущее транспортное средство четырехколесным или двухколесным. Тип впередиидущего транспортного средства определяется с использованием метода распознавания изображений. Хотя это не описано подробно, например, может использоваться метод определения типа объекта, известный на момент подачи заявки. В варианте 1 в качестве впередиидущего транспортного средства обнаружено двухколесное транспортное средство. Когда определено, что впередиидущее транспортное средство является двухколесным, как в варианте 1, осуществляется процесс управления разделяющим транспортные средства расстоянием. Между тем, когда впередиидущее транспортное средство определено как четырехколесное, осуществляется процесс управления разделяющим транспортные средства расстоянием и процесс следования по маршруту впередиидущего транспортного средства.
[0038] Процессор 320 управления разделяющим транспортные средства расстоянием осуществляет управление разделяющим транспортные средства расстоянием. При управлении разделяющим транспортные средства расстоянием осуществляют управление так, чтобы разделяющее транспортные средства расстояние d было постоянным. Разделяющее транспортные средства расстояние d может быть выражено как
d = (A/T1) + (B/T2)
с использованием констант A и B, T1 (THW: промежуток времени между двумя идущими друг за другом транспортными средствами) и T2 (TTC: время до столкновения). Для этой обработки может быть соответствующим образом использован метод, известный на момент подачи заявки.
[0039] Процессор 330 следования по маршруту впередиидущего транспортного средства осуществляет следование по маршруту на основе впередиидущего транспортного средства. Маршрут впередиидущего транспортного средства получается путем проецирования траектории впередиидущего транспортного средства, отслеживаемой с использованием стереокамеры, лидара (LIDAR) или RADER, на данные карты и получения этой траектории в качестве маршрута, по которому проехало впередиидущее транспортное средство. Затем процессор 330 следования по маршруту впередиидущего транспортного средства осуществляет процесс управления следованием по маршруту впередиидущего транспортного средства. Хотя это не описано подробно, например, может использоваться метод следования по маршруту впередиидущего транспортного средства, известный на момент подачи заявки.
[0040] Процессор 340 определения присутствия-отсутствия предшествующего впередиидущему транспортного средства определяет, присутствует ли или отсутствует какое-то транспортное средство перед впередиидущим транспортным средством (далее именуемое предшествующим впередиидущему транспортным средством). Процессор 340 определения присутствия-отсутствия предшествующего впередиидущему транспортного средства определяет, присутствует ли или отсутствует предшествующее впередиидущему транспортное средство, определяя, присутствует или отсутствует транспортное средство перед впередиидущим транспортным средством в той же полосе, что и впередиидущее транспортное средство, на данных карты, а впередиидущее транспортное средство в той же полосе, что и рассматриваемое транспортное средство 1А.
[0041] Процессор 350 определения типа предшествующего впередиидущему транспортного средства определяет, является ли предшествующее впередиидущему транспортное средство, движущееся перед впередиидущим транспортным средством, четырехколесным или двухколесным. Тип предшествующего впередиидущему транспортного средства определяется с использованием метода распознавания изображений. Хотя это не описано подробно, например, может использоваться метод определения типа объекта, известный на момент подачи заявки. Когда в варианте 1 определено, что предшествующее впередиидущему транспортное средство является четырехколесным транспортным средством, осуществляются процесс управления разделяющим транспортные средства расстоянием и процесс следования по маршруту предшествующего впередиидущему транспортного средства.
[0042] Процессор 360 следования по маршруту предшествующего впередиидущему транспортного средства осуществляет следование по маршруту на основе предшествующего впередиидущему транспортного средства. Способ следования по маршруту аналогичен способу, осуществляемому процессором 330 следования по маршруту предшествующего впередиидущему транспортного средства.
Конфигурация процесса управления помощью вождению
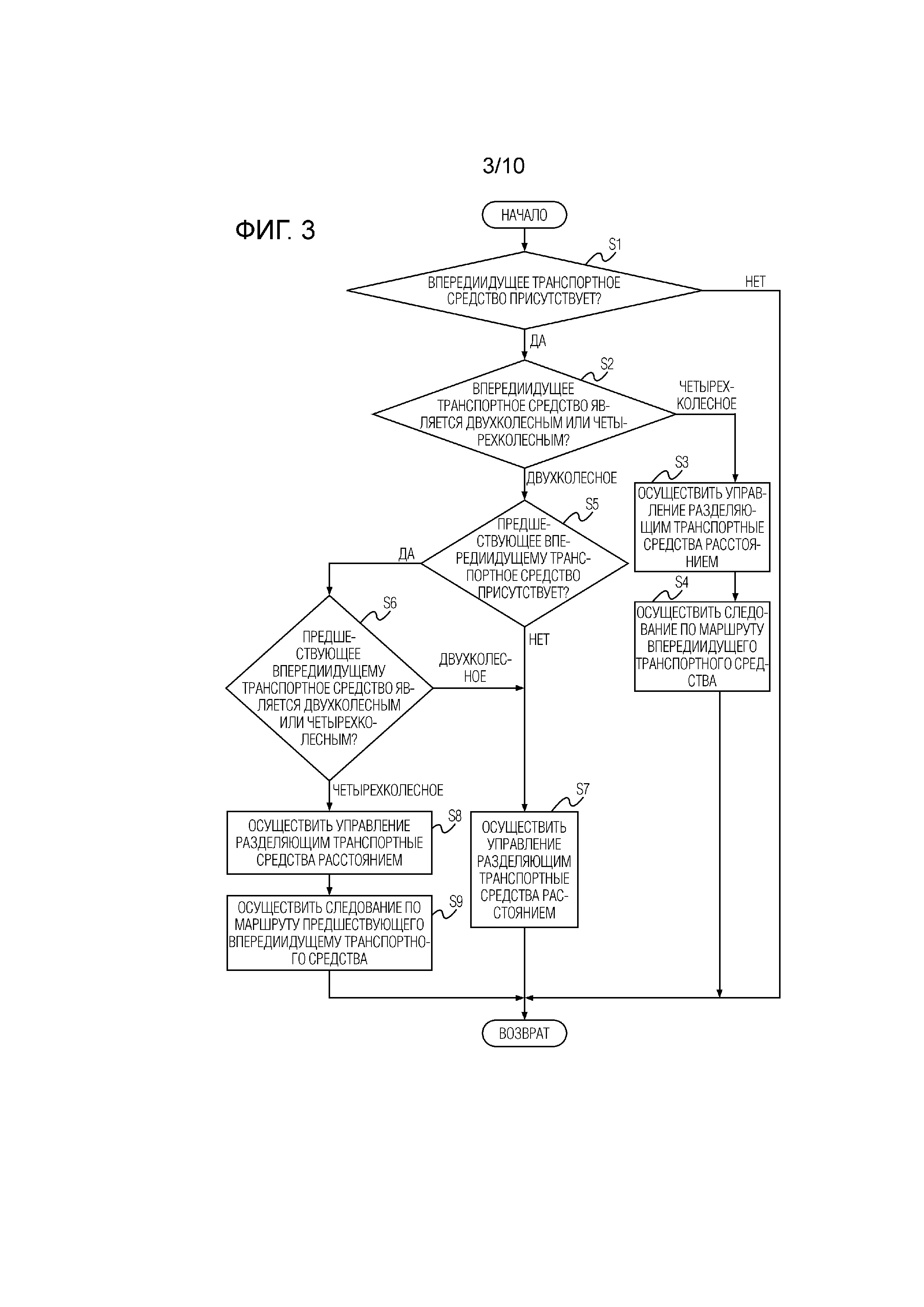
[0043] Фиг. 3 иллюстрирует последовательность операций процесса управления помощью вождению, выполняемую процессором 11 устройства 10 планирования вождения, включенного в состав устройства 100 помощи вождению по варианту 1. Ниже описаны этапы фиг. 3, указывающие конфигурацию процесса управления помощью вождению.
[0044] На этапе S1 процессор 11 определяет, присутствует ли или отсутствует впередиидущее транспортное средство. В случае ДА (впередиидущее транспортное средство присутствует), последовательность переходит к этапу S2. В случае НЕТ (впередиидущее транспортное средство отсутствует), последовательность переходит к возврату.
[0045] На этапе S2, вслед за определением на этапе S1 того, что впередиидущее транспортное средство присутствует, процессор 11 определяет, является ли впередиидущее транспортное средство двухколесным или четырехколесным. Когда впередиидущее транспортное средство является четырехколесным, последовательность переходит к этапу S3. Когда впередиидущее транспортное средство является двухколесным, последовательность переходит к этапу S5.
[0046] На этапе S3, вслед за определением на этапе S2 того, что впередиидущее транспортное средство является четырехколесным, процессор 11 осуществляет управление разделяющим транспортные средства расстоянием до впередиидущего транспортного средства (четырехколесного), и последовательность переходит к этапу S4.
[0047] На этапе S4, вслед за управлением разделяющим транспортные средства расстоянием на этапе S3, процессор 11 осуществляет следование по маршруту впередиидущего транспортного средства на основе впередиидущего транспортного средства (четырехколесного), и последовательность переходит к возврату.
[0048] На этапе S5, вслед за определением на этапе S2 того, что впередиидущее транспортное средство является двухколесным, процессор 11 определяет, присутствует ли или отсутствует предшествующее впередиидущему транспортное средство. В случае ДА (предшествующее впередиидущему транспортное средство присутствует), последовательность переходит к этапу S6. В случае НЕТ (предшествующее впередиидущему транспортное средство отсутствует), последовательность переходит к этапу S7.
[0049] На этапе S6, вслед за определением на этапе S5 того, что присутствует предшествующее впередиидущему транспортное средство, процессор 11 определяет, является ли предшествующее впередиидущему транспортное средство двухколесным или четырехколесным. Когда предшествующее впередиидущему транспортное средство является четырехколесным, последовательность переходит к этапу S8. Когда предшествующее впередиидущему транспортное средство является двухколесным, последовательность переходит к этапу S7.
[0050] На этапе S7, вслед за определением на этапе S5 того, что предшествующее впередиидущему транспортное средство отсутствует, или определением на этапе S6 того, что предшествующее впередиидущему транспортное средство является двухколесным, процессор 11 осуществляет управление разделяющим транспортные средства расстоянием и последовательность переходит к возврату.
[0051] На этапе S8, вслед за определением на этапе S6 того, что предшествующее впередиидущему транспортное средство является четырехколесным, процессор 11 осуществляет управление разделяющим транспортные средства расстоянием до впередиидущего транспортного средства (двухколесного), и последовательность переходит к этапу S9.
[0052] На этапе S9, вслед за управлением разделяющим транспортные средства расстоянием на этапе S8, процессор 11 осуществляет следование по маршруту предшествующего впередиидущему транспортного средства на основе предшествующего впередиидущему транспортного средства (четырехколесного), и последовательность переходит к возврату.
[0053] Далее описываются операции. Операции по варианту 1 описаны в отдельных разделах «Операция управления помощью вождению» и «Характерная операция управления помощью вождению».
Операция управления помощью вождению
[0054] Операция управления помощью вождению по варианту 1 описана ниже на основе фиг. 3-5.
[0055] Когда впередиидущее транспортное средство у рассматриваемого транспортного средства является четырехколесным, на блок–схеме по фиг. 3 повторяют последовательность операций с этапа S1 на этап S2, на этап S3, на этап S4, а затем на возврат. В частности, на этапе S3 осуществляют управление разделяющим транспортные средства расстоянием, а на этапе S4 осуществляют следование по маршруту впередиидущего транспортного средства. Как описано выше, когда впередиидущее транспортное средство является четырехколесным, осуществляют следование по маршруту на основе четырехколесного транспортного средства, являющегося впередиидущим транспортным средством, и управление разделяющим транспортные средства расстоянием до четырехколесного транспортного средства.
[0056] Когда впередиидущее транспортное средство у рассматриваемого транспортного средства является двухколесным, а предшествующее впередиидущему транспортное средство отсутствует, на блок–схеме по фиг. 3 повторяют последовательность операций с этапа S1 на этап S2, на этап S5, на этап S7, а затем на возврат. Кроме того, когда впередиидущее транспортное средство у рассматриваемого транспортного средства является двухколесным и предшествующее впередиидущему транспортное средство также является двухколесным, на блок–схеме по фиг. 3 повторяют последовательность операций с этапа S1 на этап S2, на этап S5, на этап S6, на этап S7, а затем на возврат. В обоих случаях на этапе S7 осуществляют только управление разделяющим транспортные средства расстоянием без осуществления следования по маршруту на основе двухколесного транспортного средства. Как описано выше, когда впередиидущее транспортное средство у рассматриваемого транспортного средства 1А является двухколесным транспортным средством 1В, как показано на фиг. 4, осуществляют только управление разделяющим транспортные средства расстоянием до двухколесного транспортного средства 1В, которое является впередиидущим транспортным средством, без осуществления следования по маршруту, основанному на двухколесном транспортном средстве 1B, которое является впередиидущим транспортным средством. Аналогично, когда впередиидущее транспортное средство у рассматриваемого транспортного средства является двухколесным и предшествующее впередиидущему транспортное средство тоже является двухколесным, осуществляют только управление разделяющим транспортные средства расстоянием до двухколесного транспортного средства 1В, которое является впередиидущим транспортным средством, без осуществления следования по маршруту, основанному на двухколесном транспортном средстве 1B, которое является впередиидущим транспортным средством. Следует отметить, что информацию о полосе движения рассматриваемого транспортного средства 1А и двухколесного транспортного средства 1В получают из картографической информации 222.
[0057] Между тем, когда впередиидущее транспортное средство у рассматриваемого транспортного средства является двухколесным, но предшествующее впередиидущему транспортное средство является четырехколесным, на блок–схеме по фиг. 3 повторяют последовательность операций с этапа S1 на этап S2, на этап S5, на этап S6, на этап S8, на этап S9, а затем на возврат. В частности, на этапе S8 осуществляют управление разделяющим транспортные средства расстоянием до впередиидущего транспортного средства (двухколесного), а на этапе S9 осуществляют следование по маршруту предшествующего впередиидущему транспортного средства на основе предшествующего впередиидущему транспортного средства (четырехколесного). Как описано выше, когда впередиидущее транспортное средство представляет собой двухколесное транспортное средство 1B, но предшествующее впередиидущему транспортное средство представляет собой четырехколесное транспортное средство 1C, как показано на фиг. 5, осуществляют управление разделяющим транспортные средства расстоянием до двухколесного транспортного средства 1B, которое является впередиидущим транспортным средством, и следование по маршруту на основе четырехколесного транспортного средства 1С, которое является предшествующим впередиидущему транспортным средством. Следует отметить, что информацию о полосе движения рассматриваемого транспортного средства 1А, двухколесного транспортного средства 1В и четырехколесного транспортного средства 1С получают из картографической информации 222.
Характерная операция управления помощью вождению
[0058] В варианте 1 определяют, есть ли или нет у рассматриваемого транспортного средства впередиидущее транспортное средство. Когда определено, что впередиидущее транспортное средство присутствует, осуществляют определение типа впередиидущего транспортного средства с определением того, является ли впередиидущее транспортное средство у рассматриваемого транспортного средства четырехколесным или двухколесным. Когда впередиидущее транспортное средство является четырехколесным, осуществляют как управление разделяющим транспортные средства расстоянием до четырехколесного транспортного средства, так и следование по маршруту на основе четырехколесного транспортного средства. Когда впередиидущее транспортное средство является двухколесным, осуществляют управление разделяющим транспортные средства расстоянием до двухколесного транспортного средства без осуществления следования по маршруту на основе двухколесного транспортного средства.
[0059] Например, предположим случай, при котором, когда впередиидущее транспортное средство присутствует во время движения в режиме автоматического вождения, осуществляют как управление разделяющим транспортные средства расстоянием, так и следование по маршруту на основе четырехколесного транспортного средства без определения типа впередиидущего транспортного средства. В этом случае, когда впередиидущее транспортное средство является двухколесным, рассматриваемое транспортное средство перемещается в боковом направлении, следуя за перемещением вбок двухколесного транспортного средства, и поведение рассматриваемого транспортного средства становится нестабильным. Таким образом, когда впередиидущее транспортное средство присутствует во время движения в режиме автоматического вождения, определяют тип впередиидущего транспортного средства и изменяют контроль за впередиидущим транспортным средством в зависимости от того, является ли впередиидущее транспортное средство четырехколесным или двухколесным. В частности, когда впередиидущее транспортное средство является четырехколесным транспортным средством с небольшим перемещением вбок, осуществляют как управление разделяющим транспортные средства расстоянием, так и следование по маршруту на основе четырехколесного транспортного средства. Между тем, когда впередиидущее транспортное средство является двухколесным транспортным средством с большим перемещением вбок, управление разделяющим транспортные средства расстоянием до двухколесного транспортного средства осуществляют без осуществления следования по маршруту на основе двухколесного транспортного средства. Соответственно, когда впередиидущее транспортное средство является двухколесным, можно подавить боковое перемещение и сделать поведение рассматриваемого транспортного средства стабильным.
[0060] В варианте 1 определяют, есть ли или нет у рассматриваемого транспортного средства предшествующее впередиидущему транспортное средство. Когда определено, что предшествующее впередиидущему транспортное средство присутствует, осуществляют определение типа предшествующего впередиидущему транспортного средства с определением того, является ли предшествующее впередиидущему транспортное средство у рассматриваемого транспортного средства четырехколесным или двухколесным. Если впередиидущее транспортное средство является двухколесным, а предшествующее впередиидущему транспортное средство является четырехколесным, то осуществляют следование по маршруту предшествующего впередиидущему транспортного средства, следуя по маршруту за четырехколесным транспортным средством, которое является предшествующим впередиидущему транспортным средством, без осуществления следования по маршруту на основе двухколесного транспортного средства.
[0061] Например, когда впередиидущее транспортное средство является двухколесным и следование по маршруту на основе двухколесного транспортного средства не осуществляется, маршрут рассматриваемого транспортного средства должен быть определен с использованием иного способа. Между тем, осуществление следования по маршруту предшествующего впередиидущему транспортного средства с использованием четырехколесного предшествующего впередиидущему транспортного средства, когда предшествующее впередиидущему транспортное средство является четырехколесным транспортным средством, устраняет необходимость в определении маршрута рассматриваемого транспортного средства иным способом. Соответственно, когда предшествующее впередиидущему транспортное средство является четырехколесным, можно подавить боковое перемещение и сделать поведение рассматриваемого транспортного средства стабильным, используя простой способ, который заключается в следовании по маршруту предшествующего впередиидущему транспортного средства.
[0062] Далее описаны эффекты. Описанные ниже эффекты могут быть получены способом помощи вождению и устройством помощи вождению в варианте 1.
[0063] (1) В способе помощи вождению, заставляющем рассматриваемое транспортное средство двигаться, следуя за впередиидущим транспортным средством, определяют, присутствует ли или отсутствует впередиидущее транспортное средство у рассматриваемого транспортного средства, и, когда определено, что впередиидущее транспортное средство присутствует, осуществляют определение типа впередиидущего транспортного средства с определением того, является ли впередиидущее транспортное средство у рассматриваемого транспортного средства четырехколесным или двухколесным. Когда впередиидущее транспортное средство является четырехколесным, осуществляют как управление разделяющим транспортные средства расстоянием до четырехколесного транспортного средства, так и следование по маршруту на основе четырехколесного транспортного средства. Когда впередиидущее транспортное средство является двухколесным, осуществляют управление разделяющим транспортные средства расстоянием до двухколесного транспортного средства без осуществления следования по маршруту на основе двухколесного транспортного средства (фиг. 4). Соответственно, можно обеспечить способ помощи вождению, который подавляет боковое перемещение и делает поведение рассматриваемого транспортного средства стабильным при являющемся двухколесным впередиидущем транспортном средстве.
[0064] (2) Определяют, есть ли или нет у рассматриваемого транспортного средства предшествующее впередиидущему транспортное средство, и, когда определено, что предшествующее впередиидущему транспортное средство присутствует, осуществляют определение типа предшествующего впередиидущему транспортного средства с определением того, является ли предшествующее впередиидущему транспортное средство у рассматриваемого транспортного средства четырехколесным или двухколесным. Когда впередиидущее транспортное средство является двухколесным, а предшествующее впередиидущему транспортное средство является четырехколесным, осуществляют следование по маршруту предшествующего впередиидущему транспортного средства, следуя по маршруту за четырехколесным транспортным средством, которое является предшествующим впередиидущему транспортным средством, без осуществления следования по маршруту на основе двухколесного транспортного средства (фиг. 5). Соответственно, в дополнение к эффекту (1), при предшествующем впередиидущему транспортном средстве, являющемся четырехколесным, можно подавить боковое перемещение и сделать поведение рассматриваемого транспортного средства стабильным, используя простой способ, который заключается в следовании по маршруту предшествующего впередиидущему транспортного средства.
[0065] (3) Устройство помощи вождению включает в себя контроллер транспортного средства (устройство 10 планирования вождения и процессор 11), который осуществляет управление разделяющим транспортные средства расстоянием между рассматриваемым транспортным средством и впередиидущим транспортным средством и управление следованием по маршруту впередиидущего транспортного средства. В этом устройстве помощи вождению контроллер транспортного средства (устройство 10 планирования вождения и процессор 11) включает в себя процессор 300 определения присутствия-отсутствия впередиидущего транспортного средства, который определяет, присутствует или отсутствует впередиидущее транспортное средство у рассматриваемого транспортного средства, и процессор 310 определения типа впередиидущего транспортного средства, который осуществляет определение типа впередиидущего транспортного средства с определением того, является ли впередиидущее транспортное средство у рассматриваемого транспортного средства четырехколесным или двухколесным, когда определено, что впередиидущее транспортное средство присутствует. Когда впередиидущее транспортное средство является четырехколесным, устройство помощи вождению осуществляет как управление разделяющим транспортные средства расстоянием до четырехколесного транспортного средства, так и следование по маршруту на основе четырехколесного транспортного средства. Когда впередиидущее транспортное средство является двухколесным, устройство помощи вождению осуществляет управление разделяющим транспортные средства расстоянием до двухколесного транспортного средства без осуществления следования по маршруту на основе двухколесного транспортного средства (фиг. 2). Соответственно, возможно обеспечить устройство помощи вождению, которое подавляет боковое перемещение и делает поведение рассматриваемого транспортного средства стабильным при являющемся двухколесным впередиидущем транспортном средстве.
Вариант 2
[0066] Вариант 2 представляет собой пример, в котором, когда впередиидущее транспортное средство является двухколесным транспортным средством, осуществляется следование по полосе движения со следованием по запланированному маршруту движения, полученному в результате распознавания полосы движения, без осуществления следования по маршруту на основе двухколесного транспортного средства.
[0067] Сначала конфигурация варианта 2 описана в отдельных разделах «Подробная конфигурация устройства планирования вождения» и «Конфигурация процесса управления помощью вождению». Следует отметить, что, поскольку «Общая конфигурация системы» в варианте 2 является такой же, как и на фиг. 1 варианта 1, ее иллюстрация и описание опущены.
Подробная конфигурация устройства планирования вождения
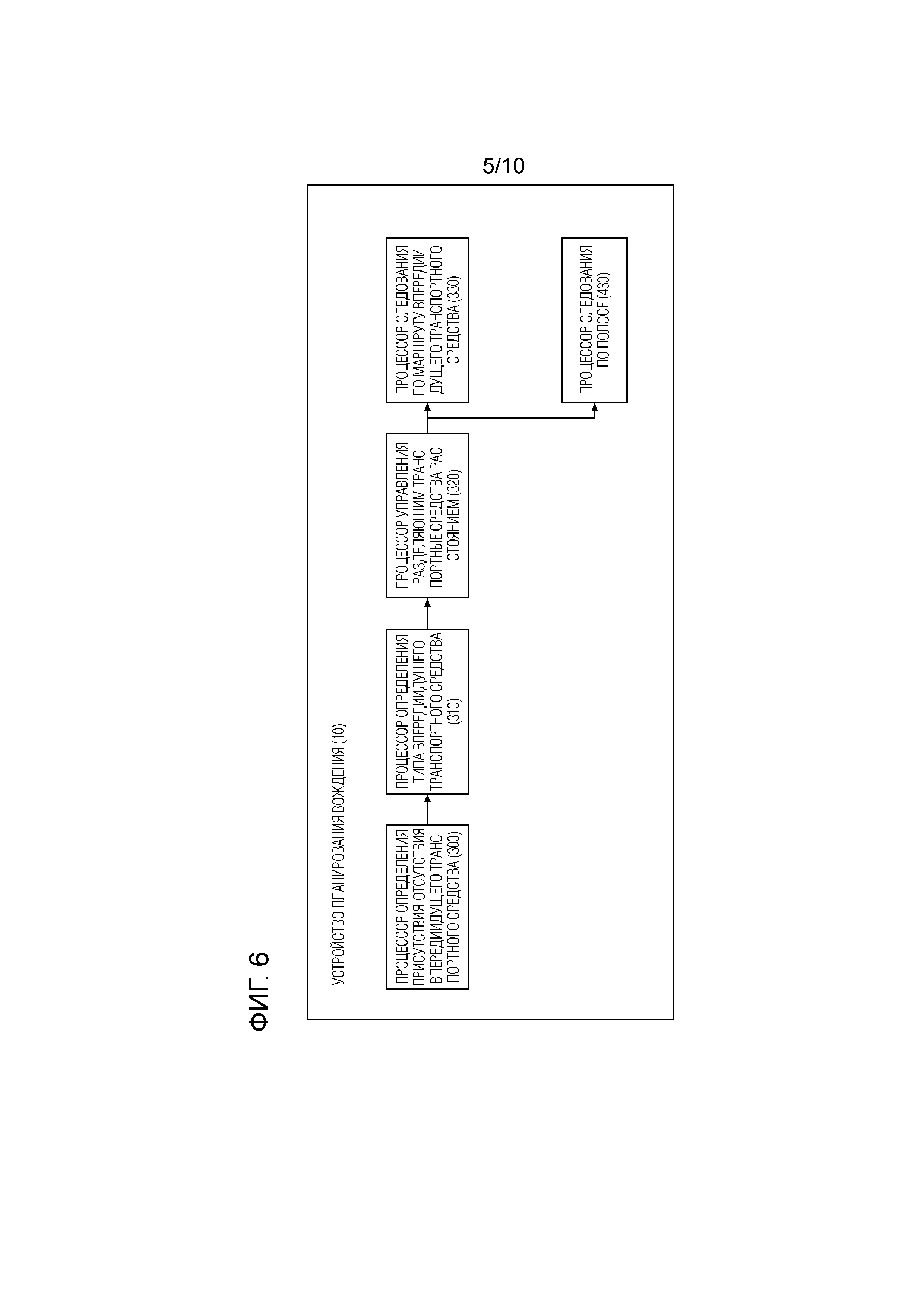
Фиг. 6 – это блок–схема конфигурации, иллюстрирующая различные типы процесса управления в процессоре 11 устройства 10 планирования вождения, включенного в состав устройства 100 помощи вождению по варианту 2. Подробная конфигурация устройства 10 планирования вождения описана ниже на основе фиг. 6. Следует отметить, что различные типы процесса управления в процессоре 11 могут применяться не только к дороге с одной полосой движения с каждой стороны, но и к другим дорожным условиям, таким как дорога с двумя полосами движения с каждой стороны.
[0068] Как показано на фиг. 6, устройство 10 планирования вождения включает в себя процессор 300 определения присутствия-отсутствия впередиидущего транспортного средства, процессор 310 определения типа впередиидущего транспортного средства, процессор 320 управления разделяющим транспортные средства расстоянием, процессор 330 следования по маршруту впередиидущего транспортного средства и процессор 430 следования по полосе. Следует отметить, что поскольку процессор 300 определения присутствия-отсутствия впередиидущего транспортного средства, процессор 310 определения типа впередиидущего транспортного средства, процессор 320 управления разделяющим транспортные средства расстоянием и процессор 330 следования по маршруту впередиидущего транспортного средства являются такими же, что и в варианте 1, их описания опущены.
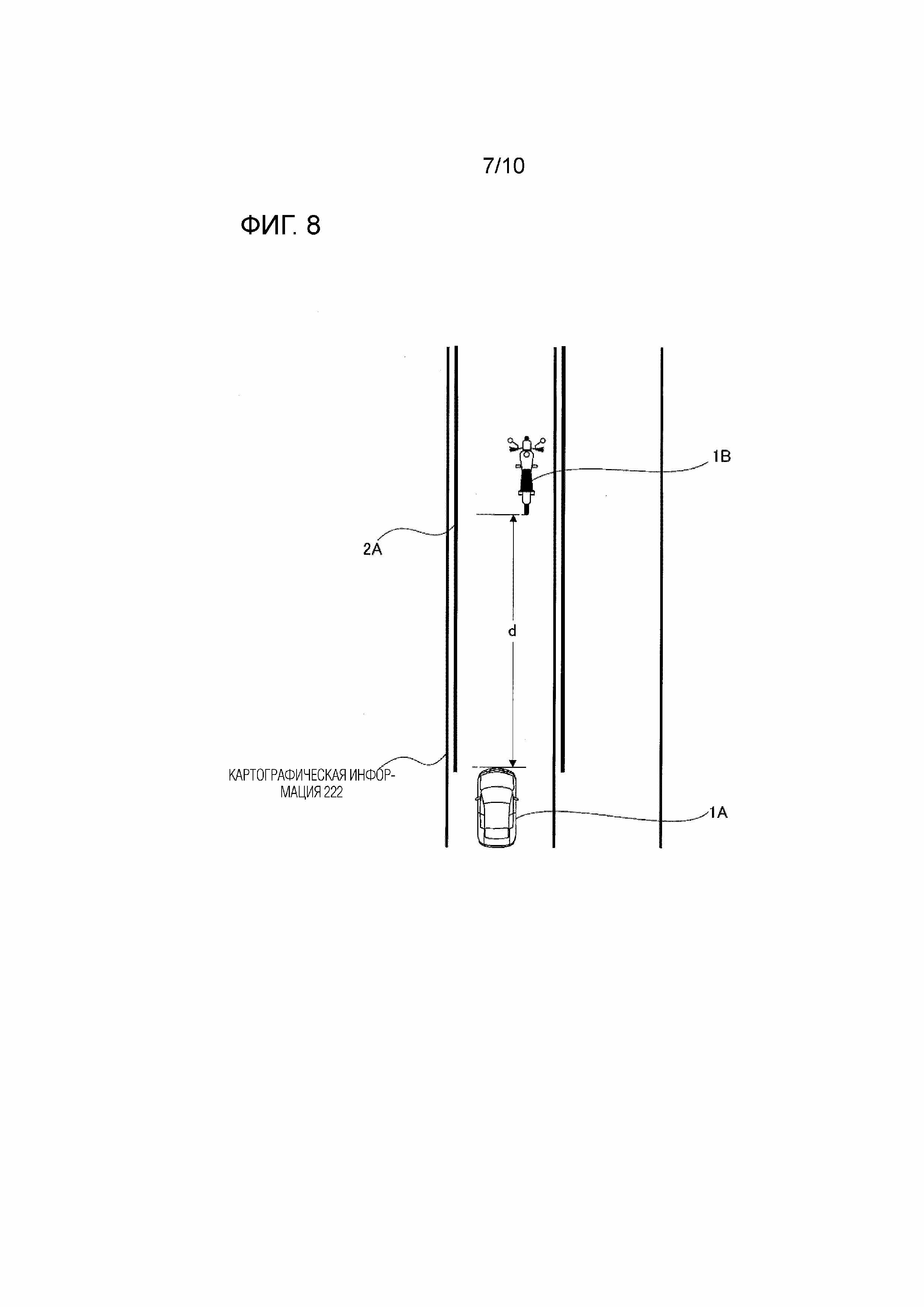
[0069] Процессор 430 следования по полосе распознает полосу движения, в которой движется рассматриваемое транспортное средство, используя информацию о белой линии или информацию о границе дороги, распознанную с использованием стереокамеры, LIDAR или RADER. В варианте 2, как показано на фиг. 8, обнаруживается полоса 2А. Затем осуществляется процесс управления движением внутри полосы 2А. Хотя это не описано подробно, например, может использоваться метод следования по полосе движения, известный на момент подачи заявки.
Конфигурация процесса управления помощью вождению
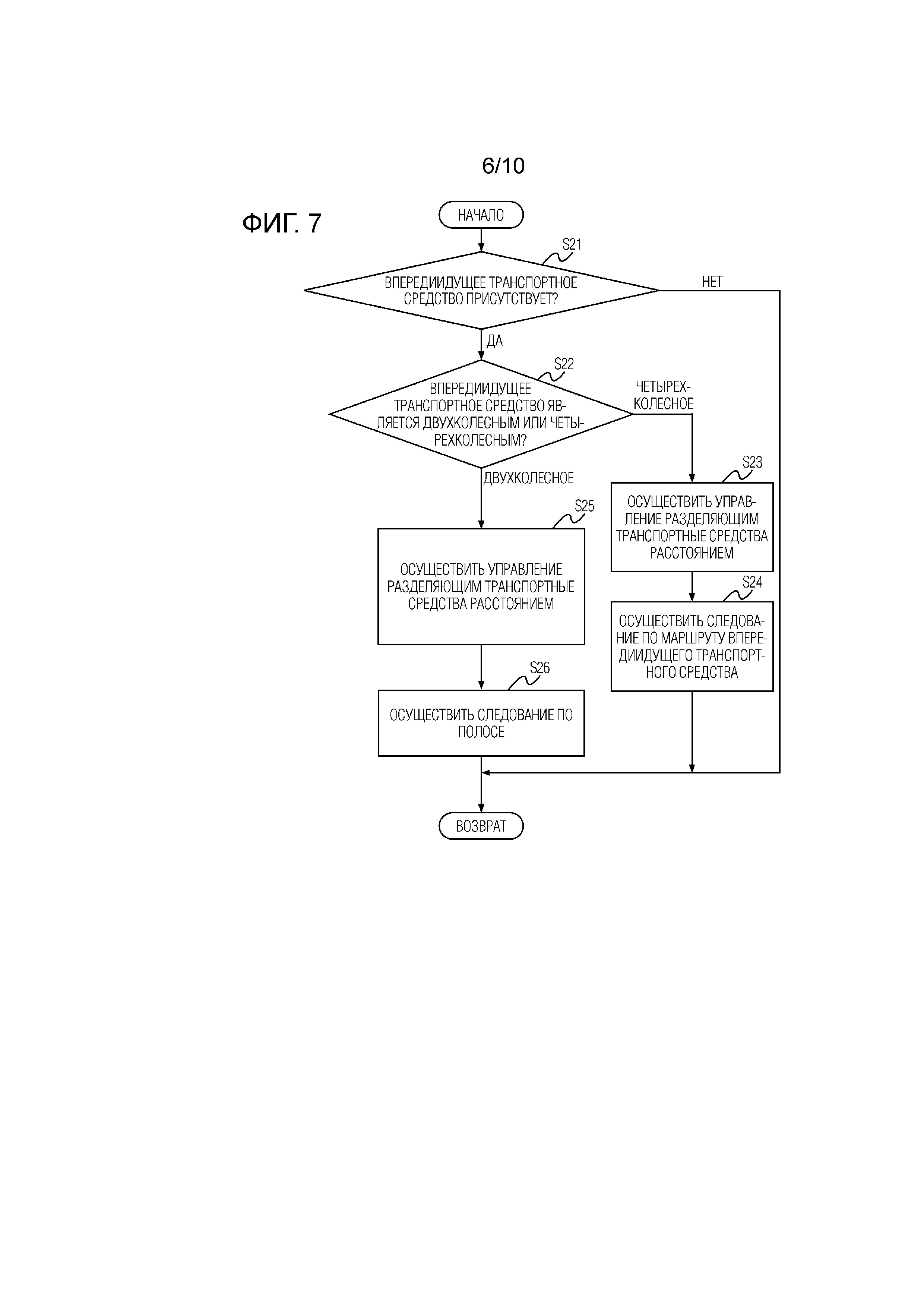
[0070] Фиг. 7 иллюстрирует последовательность операций процесса управления помощью вождению, выполняемую процессором 11 устройства 10 планирования вождения, включенного в состав устройства 100 помощи вождению по варианту 2. Ниже описаны этапы фиг. 7, указывающие конфигурацию процесса управления помощью вождению.
[0071] На этапе S21 процессор 11 определяет, присутствует ли или отсутствует впередиидущее транспортное средство. В случае ДА (впередиидущее транспортное средство присутствует), последовательность переходит к этапу S22. В случае НЕТ (впередиидущее транспортное средство отсутствует), последовательность переходит к возврату.
[0072] На этапе S22, вслед за определением на этапе S21 того, что впередиидущее транспортное средство присутствует, процессор 11 определяет, является ли впередиидущее транспортное средство двухколесным или четырехколесным. Когда впередиидущее транспортное средство является четырехколесным, последовательность переходит к этапу S23. Когда впередиидущее транспортное средство является двухколесным, последовательность переходит к этапу S25.
[0073] На этапе S23, вслед за определением на этапе S22 того, что впередиидущее транспортное средство является четырехколесным, процессор 11 осуществляет управление разделяющим транспортные средства расстоянием до впередиидущего транспортного средства (четырехколесного), и последовательность переходит к этапу S24.
[0074] На этапе S24, вслед за управлением разделяющим транспортные средства расстоянием на этапе S23, процессор 11 осуществляет следование по маршруту впередиидущего транспортного средства на основе впередиидущего транспортного средства (четырехколесного), и последовательность переходит к возврату.
[0075] На этапе S25, вслед за определением на этапе S22 того, что впередиидущее транспортное средство является двухколесным, процессор 11 осуществляет управление разделяющим транспортные средства расстоянием между рассматриваемым транспортным средством и двухколесным транспортным средством, и последовательность переходит к этапу S26.
[0076] На этапе S26, вслед за управлением разделяющим транспортные средства расстоянием на этапе S25, процессор 11 осуществляет следование по полосе со следованием по запланированному маршруту движения, полученному в результате распознавания полосы движения, и последовательность переходит к возврату.
[0077] Далее описывается операция управления помощью вождению по варианту 2.
[0078] Операция управления помощью вождению описана ниже на основе фиг. 7 и 8.
[0079] Когда впередиидущее транспортное средство у рассматриваемого транспортного средства является четырехколесным, на блок-схеме по фиг. 7 повторяют последовательность операций с этапа S21 на этап S22, на этап S23, на этап S24, а затем на возврат. В частности, на этапе S23 осуществляют управление разделяющим транспортные средства расстоянием, а на этапе S24 осуществляют следование по маршруту впередиидущего транспортного средства. Как описано выше, когда впередиидущее транспортное средство является четырехколесным, осуществляют следование по маршруту на основе четырехколесного транспортного средства, которое является впередиидущим транспортным средством, и управление разделяющим транспортные средства расстоянием до четырехколесного транспортного средства.
[0080] Когда впередиидущее транспортное средство у рассматриваемого транспортного средства является двухколесным, на блок-схеме по фиг. 7 повторяют последовательность операций с этапа S21 на этап S22, на этап S25, на этап S26, а затем на возврат. В частности, на этапе S25 осуществляют управление разделяющим транспортные средства расстоянием и на этапе S26 осуществляют следование по полосе. Как описано выше, когда впередиидущее транспортное средство у рассматриваемого транспортного средства 1A является двухколесным транспортным средством 1B, как показано на фиг. 8, следование по полосе со следованием по запланированному маршруту движения, полученному в результате распознавания полосы, осуществляют без осуществления следования по маршруту на основе двухколесного транспортного средства 1B, которое является впередиидущим транспортным средством. Следует отметить, что информация о полосе 2А, в которой движутся рассматриваемое транспортное средство 1А и двухколесное транспортное средство 1B, получена из картографической информации 222.
[0081] Как описано выше, в варианте 2, когда впередиидущее транспортное средство является двухколесным транспортным средством 1B с большим боковым перемещением, осуществляют управление разделяющим транспортные средства расстоянием до двухколесного транспортного средства 1B и следование по полосе движения по запланированному маршруту движения (например, маршруту в центральном положении полосы движения), заданному в полосе движения рассматриваемого транспортного средства 1А вдоль полосы 2А, без осуществления следования по маршруту на основе двухколесного транспортного средства 1B. Соответственно, определение маршрута движения рассматриваемого транспортного средства при следовании по полосе движения, когда впередиидущее транспортное средство является двухколесным, подавляет боковое перемещение и делает поведение рассматриваемого транспортного средства стабильным.
[0082] Далее описываются эффекты. Описанные ниже эффекты могут быть получены способом помощи вождению и устройством помощи вождению в варианте 2.
[0083] (4) Когда впередиидущее транспортное средство является двухколесным, осуществляют управление разделяющим транспортные средства расстоянием до двухколесного транспортного средства и следование по полосе со следованием по запланированному маршруту движения, полученному в результате распознавания полосы движения, без осуществления следования по маршруту на основе двухколесного транспортного средства (фиг. 8). Соответственно, в дополнение к описанному выше эффекту (1) или (2), когда впередиидущее транспортное средство является двухколесным, определение маршрута движения рассматриваемого транспортного средства при следовании по полосе может подавлять боковое перемещение и сделать поведение рассматриваемого транспортного средства стабильным.
Вариант 3
[0084] Вариант 3 является примером, в котором, когда впередиидущее транспортное средство является двухколесным, осуществляется следование по интерполированной полосе со следованием по интерполированной полосе, сформированной на основе запланированного маршрута движения, полученного в результате распознавания полосы движения, без осуществления следования по маршруту на основе двухколесного транспортного средства.
[0085] Сначала описана конфигурация варианта 3 в отдельных разделах «Подробная конфигурация устройства планирования вождения» и «Конфигурация процесса управления помощью вождению». Следует отметить, что, поскольку «Общая конфигурация системы» в варианте 3 является такой же, как и на фиг. 1 варианта 1, ее иллюстрация и описание опущены.
Подробная конфигурация устройства планирования вождения
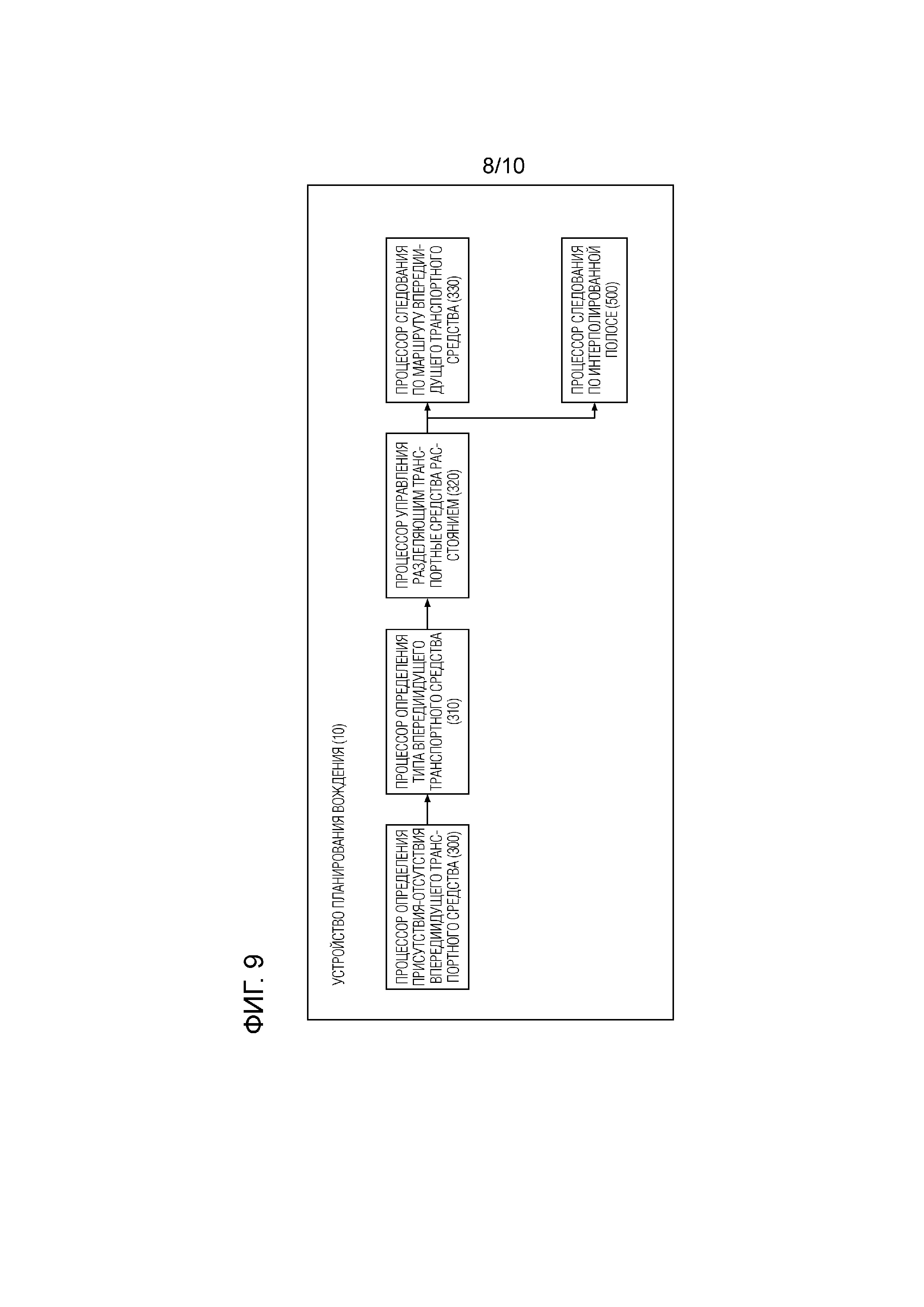
Фиг. 9 – это блок–схема конфигурации, иллюстрирующая различные типы процесса управления в процессоре 11 устройства 10 планирования вождения, включенного в состав устройства 100 помощи вождению по варианту 3. Подробная конфигурация устройства 10 планирования вождения описана ниже на основе фиг. 9. Следует отметить, что различные типы процесса управления в процессоре 11 могут применяться не только к дороге с одной полосой движения с каждой стороны, но и к другим дорожным условиям, таким как дорога с двумя полосами движения с каждой стороны.
[0086] Как показано на фиг. 9, устройство 10 планирования вождения включает в себя процессор 300 определения присутствия-отсутствия впередиидущего транспортного средства, процессор 310 определения типа впередиидущего транспортного средства, процессор 320 управления разделяющим транспортные средства расстоянием, процессор 330 следования по маршруту впередиидущего транспортного средства и процессор 500 следования по интерполированной полосе. Следует отметить, что поскольку процессор 300 определения присутствия-отсутствия впередиидущего транспортного средства, процессор 310 определения типа впередиидущего транспортного средства, процессор 320 управления разделяющим транспортные средства расстоянием и процессор 330 следования по маршруту впередиидущего транспортного средства являются такими же, что и в варианте 1, их описания опущены.
[0087] Процессор 500 следования по интерполированной полосе распознает полосу, в которой движется рассматриваемое транспортное средство, используя информацию о белой линии или информацию о границе дороги, распознанную с использованием стереокамеры, LIDAR или RADER. В варианте 3, как показано на фиг. 11 и 12, обнаружены полосы 3А, 3А'. Затем, когда длина L2 каждой из распознанных полос 3А, 3А' меньше, чем наблюдаемое вперед расстояние L1, полоса 3А, 3А' интерполируется. Например, как показано на фиг. 11, запланированный маршрут движения продлевается по прямой линии на участке от дальнего конца полосы 3А до положения впередиидущего транспортного средства (двухколесного транспортного средства 1В), и этот продленный маршрут задается в качестве интерполированной полосы 3В. Кроме того, как показано на фиг. 12, получают кривизну ρ на дальнем конце полосы 3А', запланированный маршрут движения продлевают по кривой линии с кривизной ρ до положения впередиидущего транспортного средства (двухколесного транспортного средства 1В), и этот продленный маршрут задают в качестве интерполированной полосы 3В'. Затем осуществляют процесс управления движением внутри интерполированной полосы 3В, 3В'. Хотя это не описано подробно, например, может использоваться метод следования по полосе, известный на момент подачи заявки.
Конфигурация процесса управления помощью вождению
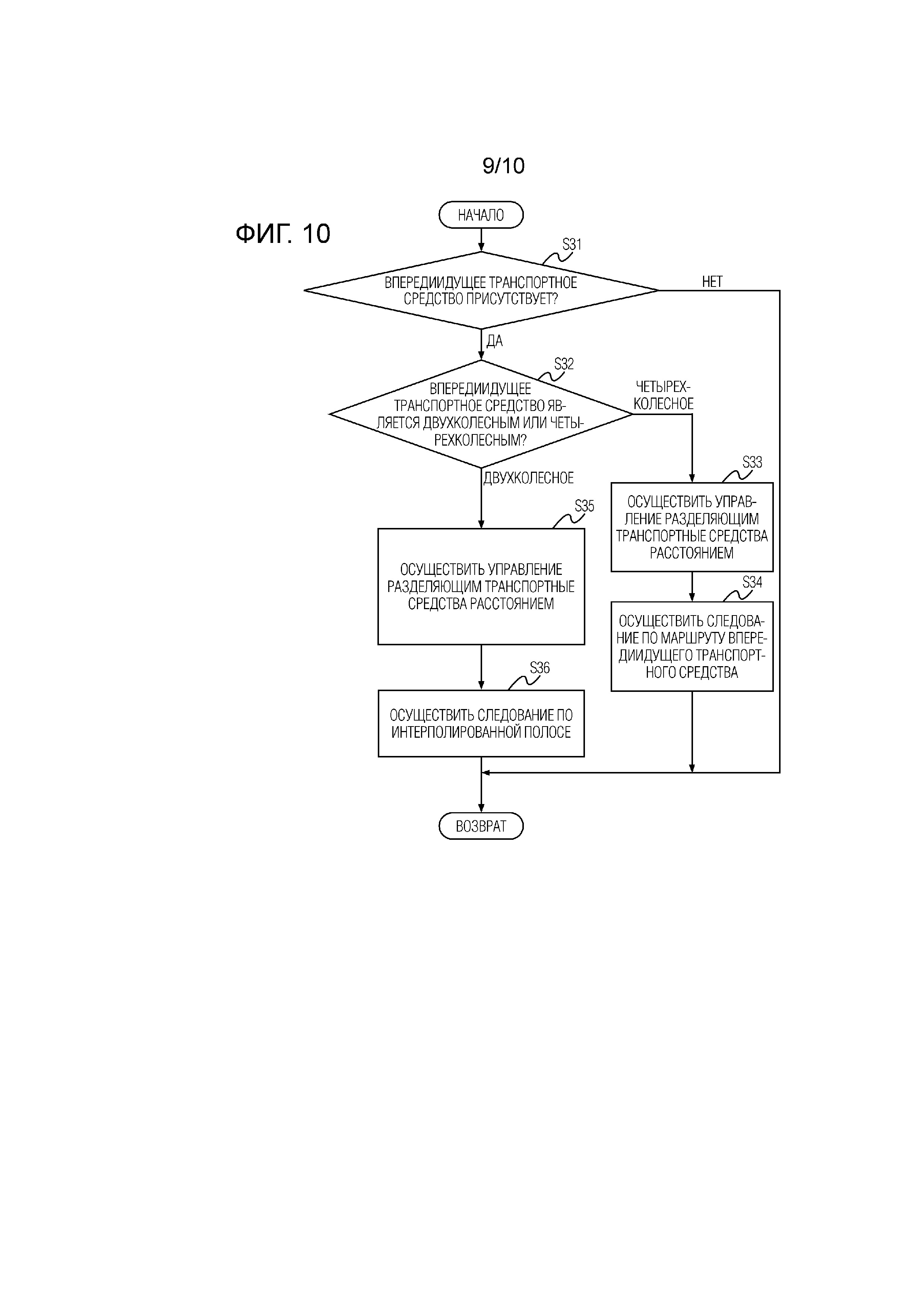
[0088] Фиг. 10 иллюстрирует последовательность операций процесса управления помощью вождению, выполняемую процессором 11 устройства 10 планирования вождения, включенного в состав устройства 100 помощи вождению по варианту 3. Ниже описаны этапы фиг. 10, указывающие конфигурацию процесса управления помощью вождению.
[0089] На этапе S31 процессор 11 определяет, присутствует ли или отсутствует впередиидущее транспортное средство. В случае ДА (впередиидущее транспортное средство присутствует), последовательность переходит к этапу S32. В случае НЕТ (впередиидущее транспортное средство отсутствует), последовательность переходит к возврату.
[0090] На этапе S32, вслед за определением на этапе S31 того, что впередиидущее транспортное средство присутствует, процессор 11 определяет, является ли впередиидущее транспортное средство двухколесным или четырехколесным. Когда впередиидущее транспортное средство является четырехколесным, последовательность переходит к этапу S33. Когда впередиидущее транспортное средство является двухколесным, последовательность переходит к этапу S35.
[0091] На этапе S33, вслед за определением на этапе S32 того, что впередиидущее транспортное средство является четырехколесным, процессор 11 осуществляет управление разделяющим транспортные средства расстоянием до впередиидущего транспортного средства (четырехколесного), и последовательность переходит к этапу S34.
[0092] На этапе S34, вслед за управлением разделяющим транспортные средства расстоянием на этапе S33, процессор 11 осуществляет следование по маршруту впередиидущего транспортного средства на основе впередиидущего транспортного средства (четырехколесного), и последовательность переходит к возврату.
[0093] На этапе S35, вслед за определением на этапе S32 того, что впередиидущее транспортное средство является двухколесным, процессор 11 осуществляет управление разделяющим транспортные средства расстоянием между рассматриваемым транспортным средством и двухколесным транспортным средством, и последовательность переходит к этапу S36.
[0094] На этапе S36, вслед за управлением разделяющим транспортные средства расстоянием на этапе S35, процессор 11 осуществляет следование по интерполированной полосе со следованием по интерполированной полосе, сформированной на основе запланированного маршрута движения, полученного в результате распознавания полосы, и последовательность переходит к возврату.
[0095] Далее описана операция управления помощью вождению по варианту 3.
[0096] Операция управления помощью вождению описана ниже на основе фиг. 10-12.
[0097] Когда впередиидущее транспортное средство у рассматриваемого транспортного средства является четырехколесным, на блок–схеме по фиг. 10 повторяют последовательность операций с этапа S31 на этап S32, на этап S33, на этап S34, а затем на возврат. В частности, на этапе S33 осуществляют управление разделяющим транспортные средства расстоянием, а на этапе S34 осуществляют следование по маршруту впередиидущего транспортного средства. Как описано выше, когда впередиидущее транспортное средство является четырехколесным, осуществляют следование по маршруту на основе четырехколесного транспортного средства, являющегося впередиидущим транспортным средством, и управление разделяющим транспортные средства расстоянием до четырехколесного транспортного средства.
[0098] Когда впередиидущее транспортное средство у рассматриваемого транспортного средства является двухколесным, на блок–схеме по фиг. 10 повторяют последовательность операций с этапа S31 на этап S32, на этап S35, на этап S36, а затем на возврат. В частности, на этапе S35 осуществляют управление разделяющим транспортные средства расстоянием, а на этапе S36 осуществляют следование по интерполированной полосе. Как описано выше, когда впередиидущее транспортное средство у рассматриваемого транспортного средства 1А является двухколесным транспортным средством 1В, осуществляют следование по интерполированной полосе со следованием по интерполированной полосе 3В, 3В', сформированной на основе запланированного маршрута движения, полученного в результате распознавания полосы, без осуществления следования по маршруту на основе двухколесного транспортного средства 1В, которое является впередиидущим транспортным средством.
[0099] В этом случае, когда впередиидущее транспортное средство у рассматриваемого транспортного средства 1А является двухколесным транспортным средством 1В при движении по прямой дороге, как показано на фиг. 11, интерполированная полоса 3В, полученная линейной интерполяцией, используется для осуществления следования по интерполированной полосе со следованием по интерполированной полосе 3В. Между тем, когда впередиидущее транспортное средство у рассматриваемого транспортного средства 1А является двухколесным транспортным средством 1В при движении по кривой дороге, как показано на фиг. 12, интерполированная полоса 3В', полученная криволинейной интерполяцией, используется для осуществления следования по интерполированной полосе со следованием по интерполированной полосе 3B'. Следует отметить, что информация о полосах 3А, 3А, в которых движутся рассматриваемое транспортное средство 1А и двухколесное транспортное средство 1В, получена из картографической информации 222.
[0100] Как описано выше, в варианте 3, когда впередиидущее транспортное средство является двухколесным транспортным средством 1B с большим боковым перемещением, осуществляют управление разделяющим транспортные средства расстоянием до двухколесного транспортного средства 1B и следование по интерполированной полосе со следованием по интерполированной полосе 3B, 3B', заданной на основе запланированного маршрута движения, заданного в полосе движения рассматриваемого транспортного средства 1A, без осуществления следования по маршруту на основе двухколесного транспортного средства 1B. Соответственно, определение маршрута движения рассматриваемого транспортного средства при следовании по интерполированной полосе, когда впередиидущее транспортное средство является двухколесным, а длина L2 распознанной полосы 3А, 3А' мала, подавляет боковое перемещение и делает поведение рассматриваемого транспортного средства стабильным.
[0101] Далее описаны эффекты. Описанные ниже эффекты могут быть получены способом помощи вождению и устройством помощи вождению в варианте 3.
[0102] (5) Когда впередиидущее транспортное средство является двухколесным, осуществляют управление разделяющим транспортные средства расстоянием до двухколесного транспортного средства и следование по интерполированной полосе со следованием по интерполированной полосе 3В, 3В', сформированной на основе запланированного маршрута движения, полученного в результате распознавания полосы, без осуществления следования по маршруту на основе двухколесного транспортного средства (фиг. 10). Соответственно, в дополнение к описанному выше эффекту (1) или (2), когда впередиидущее транспортное средство является двухколесным, а длина распознанной полосы 3А, 3А' мала, определение маршрута движения рассматриваемого транспортного средства при следовании по интерполированной полосе может подавлять боковое перемещение и сделать поведение рассматриваемого транспортного средства стабильным.
[0103] (6) Интерполированная полоса 3В формируется путем линейного продления запланированного маршрута движения, полученного в результате распознавания полосы, до положения двухколесного транспортного средства 1В, которое является впередиидущим транспортным средством (фиг. 11). Соответственно, в дополнение к описанному выше эффекту (5), когда длина распознанной полосы 3А мала в ситуации, при которой рассматриваемое транспортное средство движется по прямой дороге, можно сформировать интерполированную полосу 3В, которая позволяет сделать поведение рассматриваемого транспортного средства стабильным.
[0104] (7) Интерполированная полоса 3В' формируется путем продления запланированного маршрута движения, полученного в результате распознавания полосы, до положения двухколесного транспортного средства 1В, которое является впередиидущим транспортным средством, в соответствии с кривизной ρ на дальнем конце запланированного маршрута движения (фиг. 12). Соответственно, в дополнение к описанному выше эффекту (5), когда длина распознанной полосы 3А' мала в ситуации, при которой рассматриваемое транспортное средство движется по кривой дороге, можно сформировать интерполированную полосу 3В', которая позволяет сделать поведение рассматриваемого транспортного средства стабильным.
[0105] Способ помощи вождению и устройство помощи вождению по настоящему раскрытию были описаны выше на основе вариантов 1–3. Тем не менее, конкретные конфигурации не ограничены этими вариантами осуществления, и могут быть проделаны конструктивные изменения и дополнения при условии, что они не выходят за пределы сущности изобретения согласно формуле изобретения в объеме формулы изобретения.
[0106] В вариантах 1–3 система, включающая в себя устройство 100 помощи вождению и бортовое оборудование 200, описана в качестве примера системы 1 помощи вождению. Однако система помощи вождению не ограничена системой в вариантах 1–3, и часть функций может быть передана портативному терминальному устройству, которое может обмениваться информацией бортового оборудования. Следует отметить, что терминальное устройство включает в себя такие устройства, как смартфон и карманный персональный компьютер (КПК).
[0107] В варианте 1 описан пример, в котором, когда впередиидущее транспортное средство является двухколесным, следование по маршруту на основе двухколесного транспортного средства в принципе не осуществляется. В варианте 2 описан пример, в котором, когда впередиидущее транспортное средство является двухколесным, осуществляется следование по полосе. Кроме того, в варианте 3 описан пример, в котором, когда впередиидущее транспортное средство является двухколесным, осуществляется следование по интерполированной полосе. Однако в вариантах 2 и 3, например, когда впередиидущее транспортное средство является двухколесным, а предшествующее впередиидущему транспортное средство является четырехколесным, следование по маршруту предшествующего впередиидущему транспортного средства со следованием по маршруту четырехколесного транспортного средства, которое является предшествующим впередиидущему транспортным средством, может быть осуществлено, как и в варианте 1.
[0108] В варианте 1 описан пример, в котором способ помощи вождению и устройство помощи вождению по настоящему раскрытию применяются в транспортном средстве автоматического вождения с системой помощи вождению, которая автоматически управляет рулением/вождением/торможением на основе выбора режима автоматического вождения. Тем не менее, способ помощи вождению и устройство помощи вождению по настоящему раскрытию могут применяться в транспортном средстве с помощью вождению, которое может по меньшей мере следовать за боковым положением впередиидущего транспортного средства.
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство планирования вождения, аппаратура содействия при движении и способ планирования вождения
Устройство определения окружения, аппаратура содействия при движении и способ определения окружения
Способ и устройство содействия при парковке
Способ и устройство помощи при вождении
Способ и устройство помощи при вождении
Способ оценки собственной позиции и устройство оценки собственной позиции
Способ управления движением транспортного средства и устройство управления движением транспортного средства
Способ управления транспортным средством и устройство управления транспортным средством
Способ управления транспортным средством и устройство управления транспортным средством
Устройство помощи при вождении и способ помощи при вождении

