Результат интеллектуальной деятельности: СПОСОБ ПОМОЩИ ПРИ ДВИЖЕНИИ УСТРОЙСТВОМ ПОМОЩИ ПРИ ДВИЖЕНИИ
Вид РИД
Изобретение
Область техники
[0001] Настоящее изобретение относится к способу помощи при движении и устройству помощи при движении для обнаружения действия другого транспортного средства вокруг рассматриваемого транспортного средства и оказания помощи при движении рассматриваемому транспортному средству на основании обнаруженного действия другого транспортного средства.
Предпосылки изобретения
[0002] Известно устройство управления транспортным средством, которое управляет транспортным средством в зависимости от соответствующих условий, когда транспортное средство движется в присутствии слепой зоны (см. патентный документ 1). Раскрытое в патентном документе 1 устройство управления транспортным средством определяет относительный приоритет между маршрутом, по которому следует рассматриваемое транспортное средство, и маршрутом, по которому следует другое транспортное средство, с тем чтобы прогнозировать действие другого транспортного средства в соответствии с определенным приоритетом.
Список цитируемой литературы
Патентная литература
[0003] Патентный документ 1: WO 2016/104198
Сущность изобретения
Техническая проблема
[0004] Раскрытое в патентном документе 1 устройство управления транспортным средством все еще обладает проблемой точного определения действия другого транспортного средства в такой дорожной ситуации, при которой рассматриваемое транспортное средство должно уступать дорогу другому транспортному средству с учетом времени, даже если рассматриваемое транспортное средство имеет более высокий приоритет на дороге, чем другое транспортное средство.
[0005] Для решения описанной выше традиционной проблемы настоящее изобретение предоставляет способ помощи при движении и устройство помощи при движении, способные повысить точность обнаружения действия другого транспортного средства.
Техническое решение
[0006] Способ помощи при движении в соответствии с одним аспектом настоящего изобретения получает характеристики вождения другого транспортного средства вокруг рассматриваемого транспортного средства, определяет, находится ли другое транспортное средство в режиме автономного вождения, в зависимости от характеристик вождения другого транспортного средства, устанавливает зону пересечения, в которой область движения рассматриваемого транспортного средства и область движения другого транспортного средства пересекаются друг с другом, и обнаруживает действие другого транспортного средства, которое входит в зону пересечения, в соответствии с результатом определения того, находится ли другое транспортное средство в режиме автономного вождения.
Преимущественные эффекты
[0007] Аспект настоящего изобретения позволяет повысить точность обнаружения действия другого транспортного средства.
Краткое описание чертежей
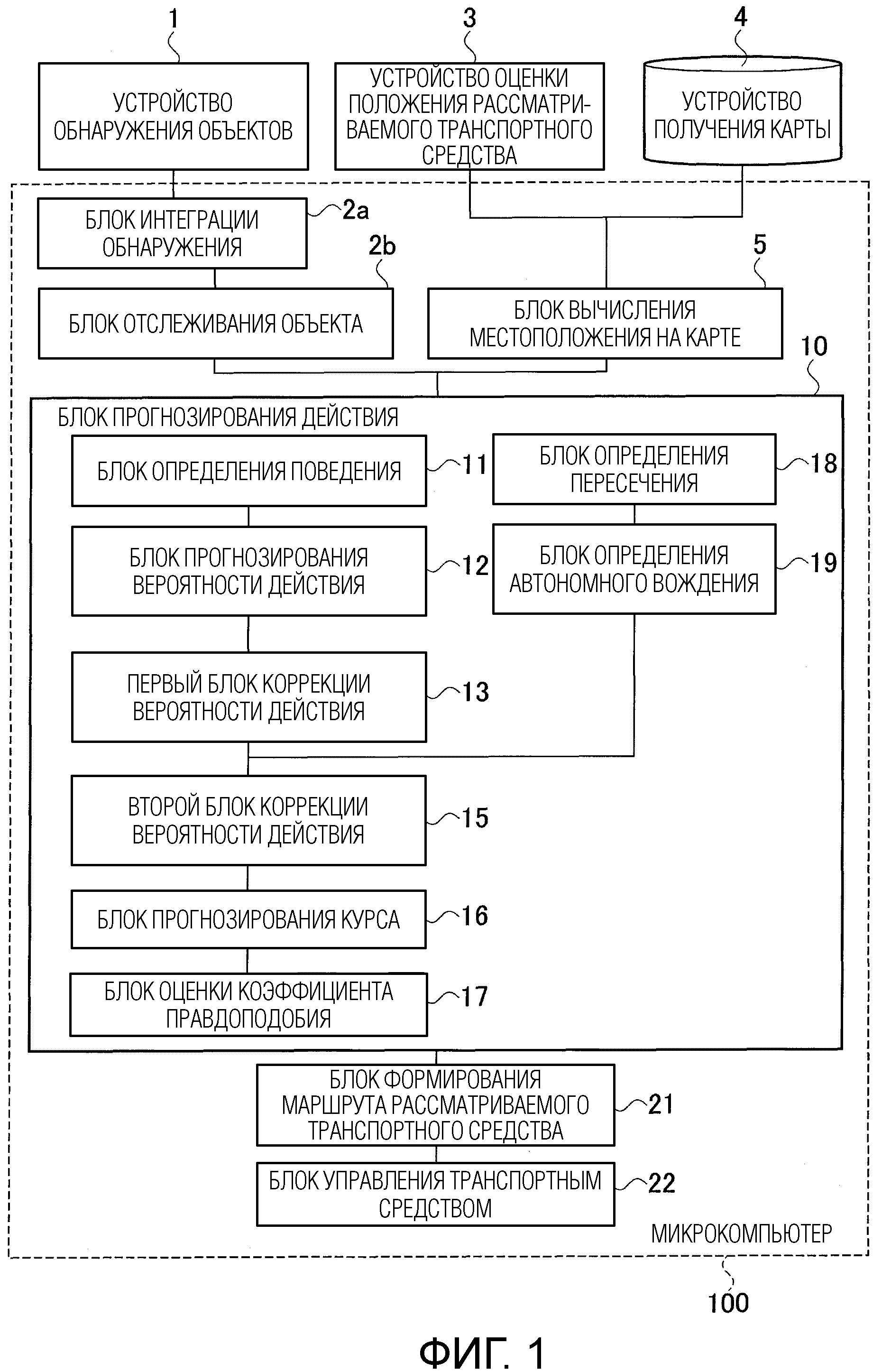
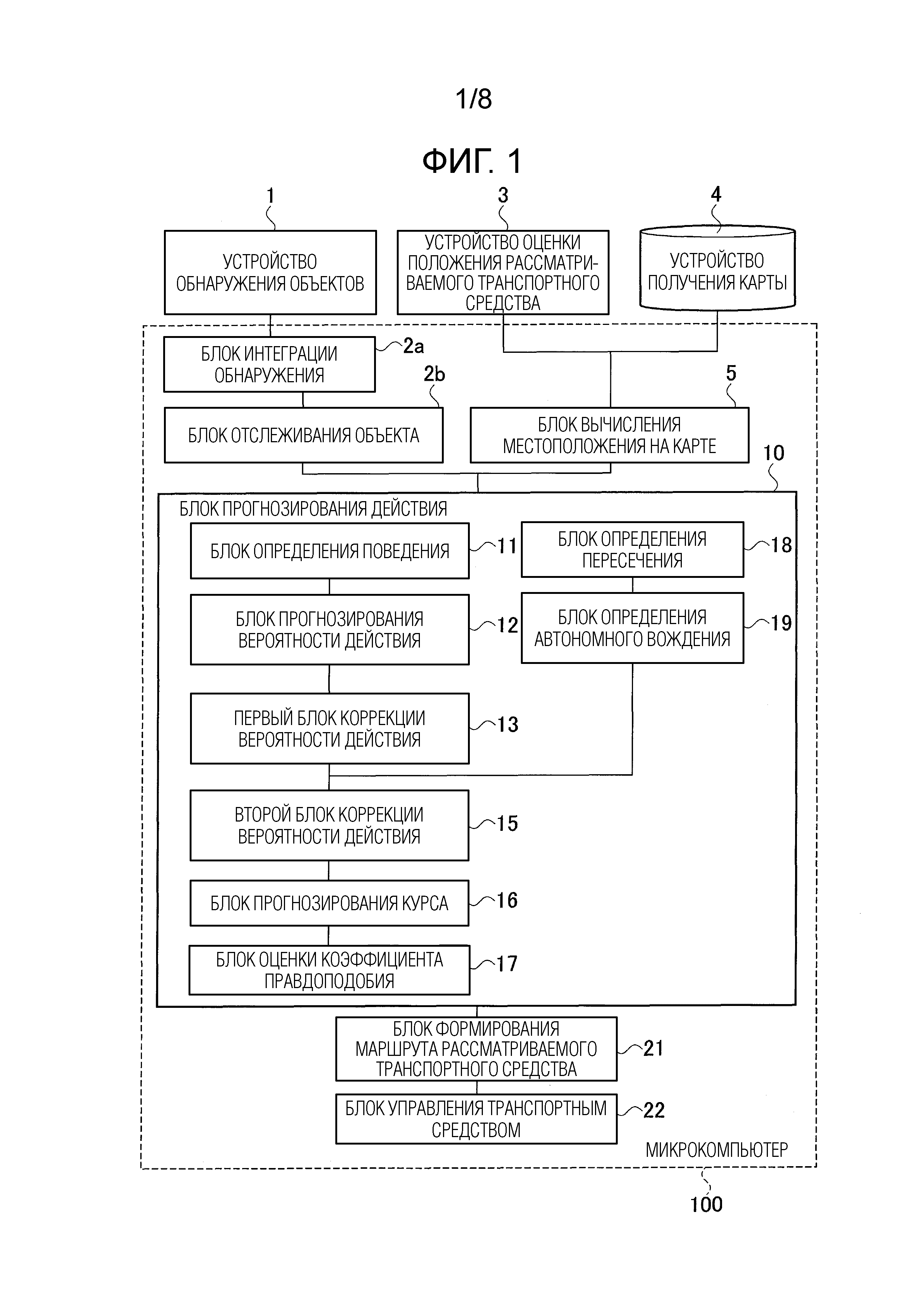
[0008] [Фиг. 1] Фиг. 1 представляет собой блок-схему, показывающей строение устройства помощи при движении и устройства обнаружения действия согласно одному варианту осуществления.
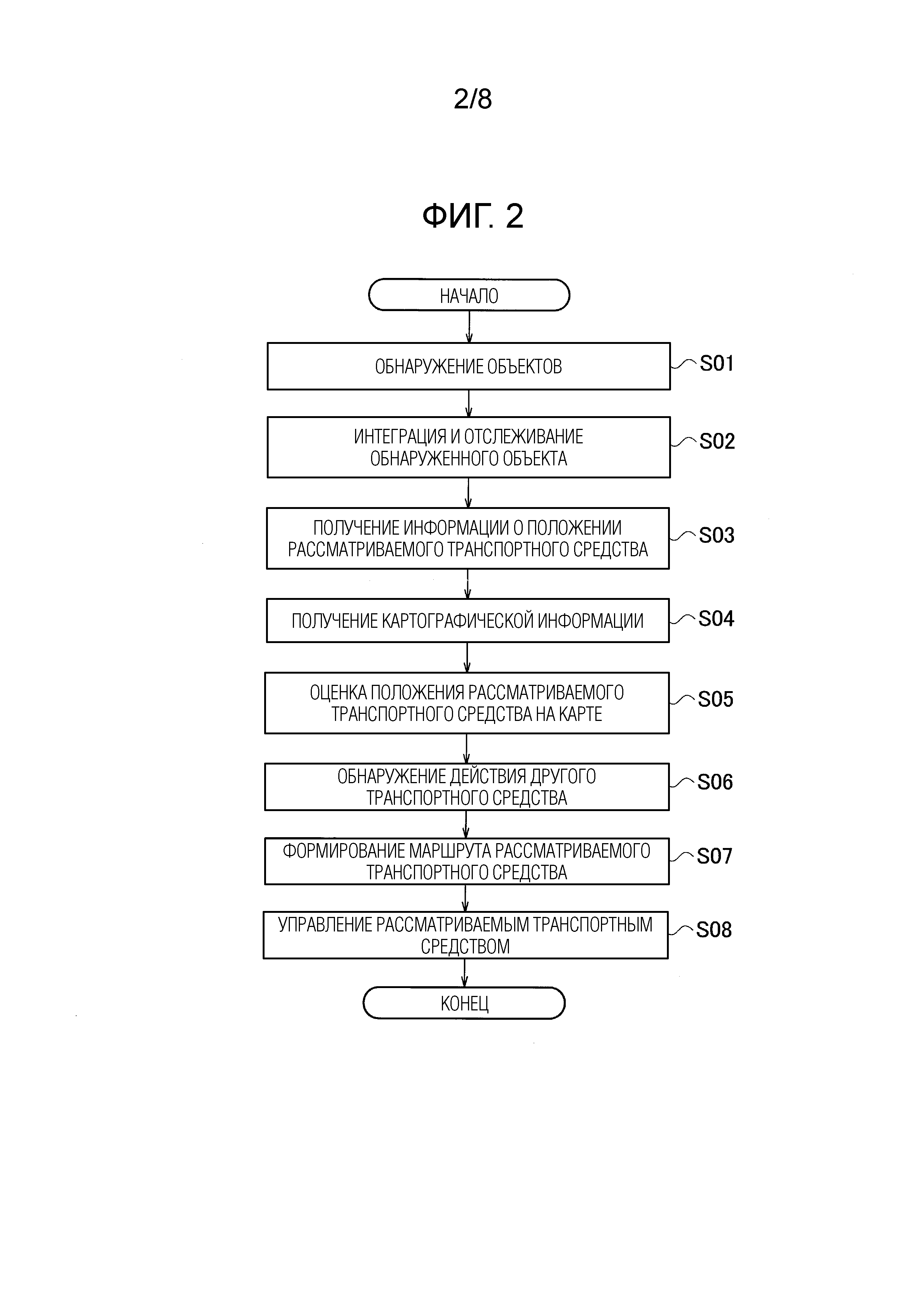
[Фиг. 2] Фиг. 2 представляет собой блок-схему последовательности операций, показывающую пример работы устройства помощи при движении и устройства обнаружения действия, показанных на фиг. 1.
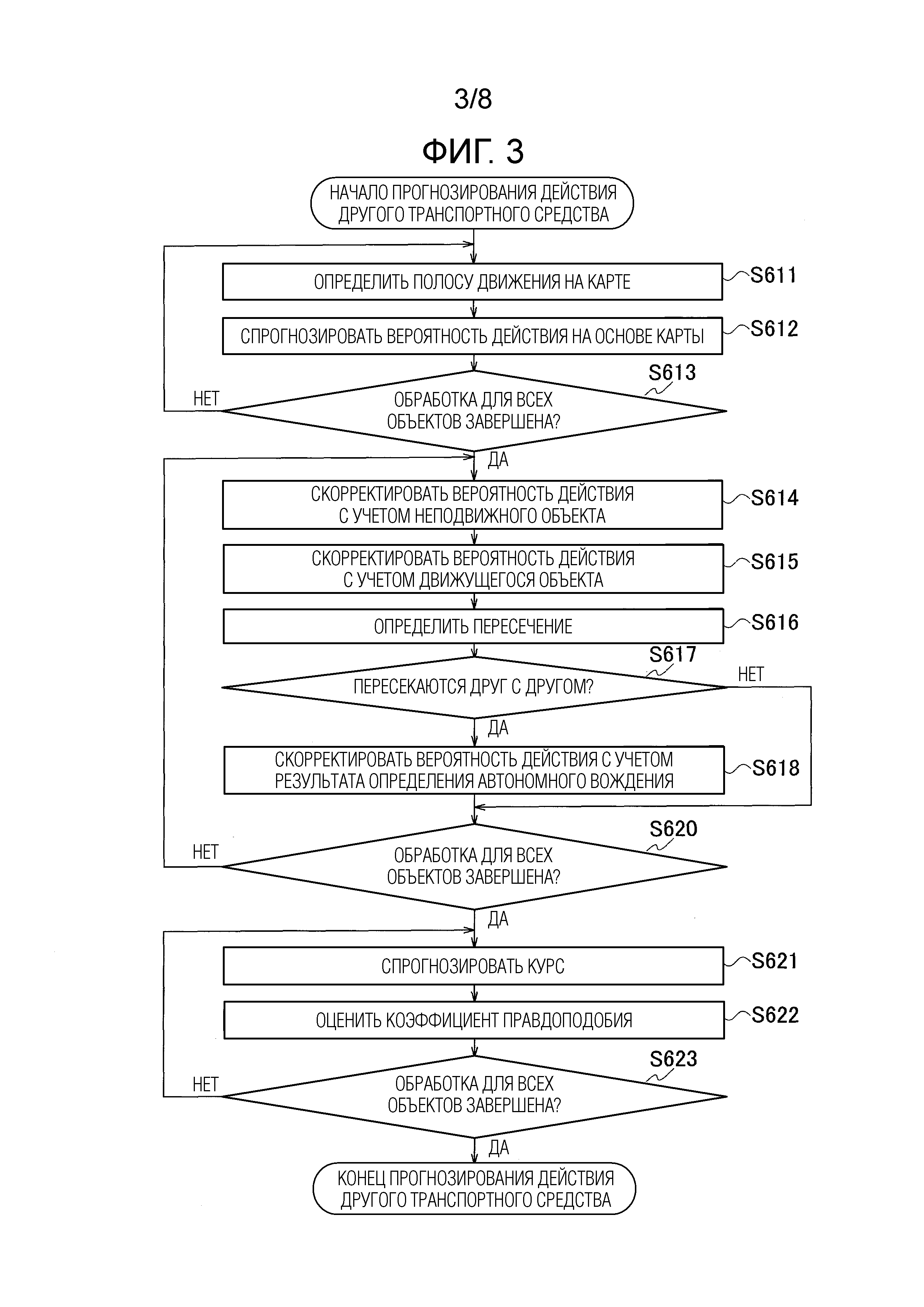
[Фиг. 3] Фиг. 3 является блок-схемой последовательности операций, показывающей конкретный процесс на этапе S06, показанном на фиг. 2.
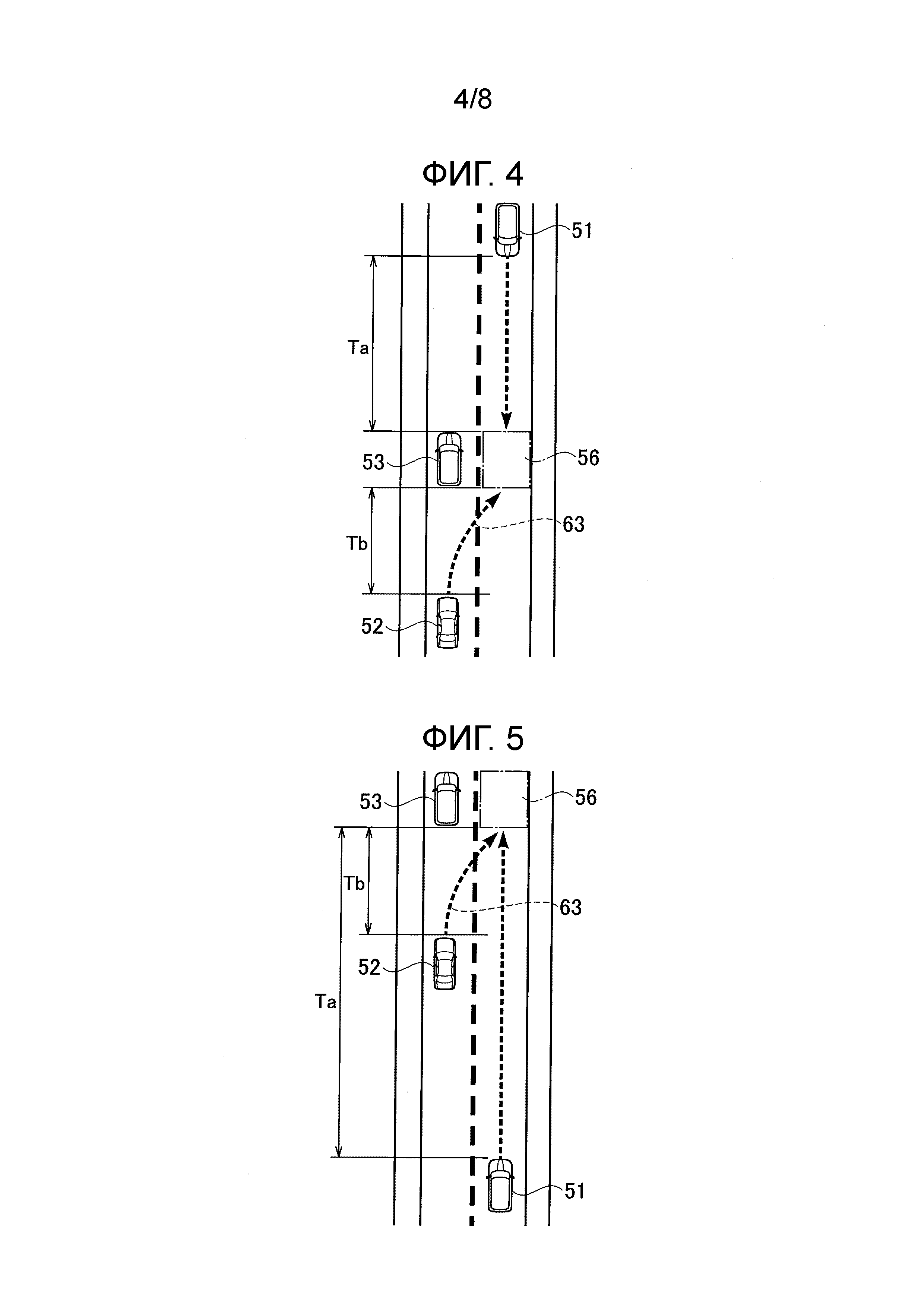
[Фиг. 4] Фиг. 4 - вид сверху, иллюстрирующий дорожную ситуацию, в которой рассматриваемое транспортное средство 51 движется в своей полосе движения по дороге с двумя полосами встречного движения, а другое транспортное средство 52 движется навстречу рассматриваемому транспортному средству 51 в полосе встречного движения.
[Фиг. 5] Фиг. 5 - вид сверху, иллюстрирующий дорожную ситуацию, в которой рассматриваемое транспортное средство 51 движется по правой полосе на двухполосной дороге с односторонним движением, а другое транспортное средство 52 движется по левой полосе наискосок впереди рассматриваемого транспортного средства 51.
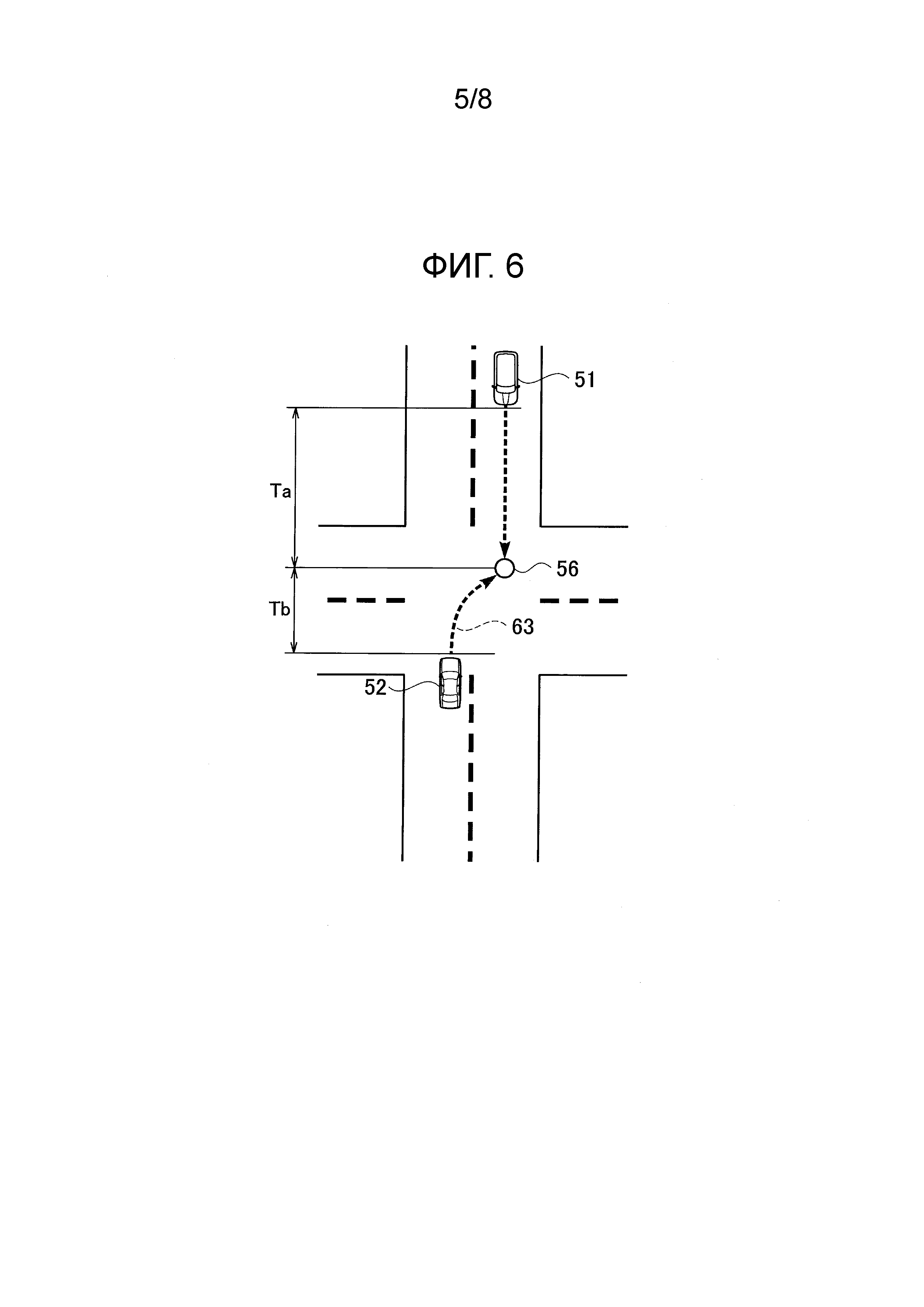
[Фиг. 6] Фиг. 6 - вид сверху, иллюстрирующий дорожную ситуацию, в которой рассматриваемое транспортное средство 51 на своей полосе движения и другое транспортное средство 52 на встречной полосе движения движутся к тому же перекрестку.
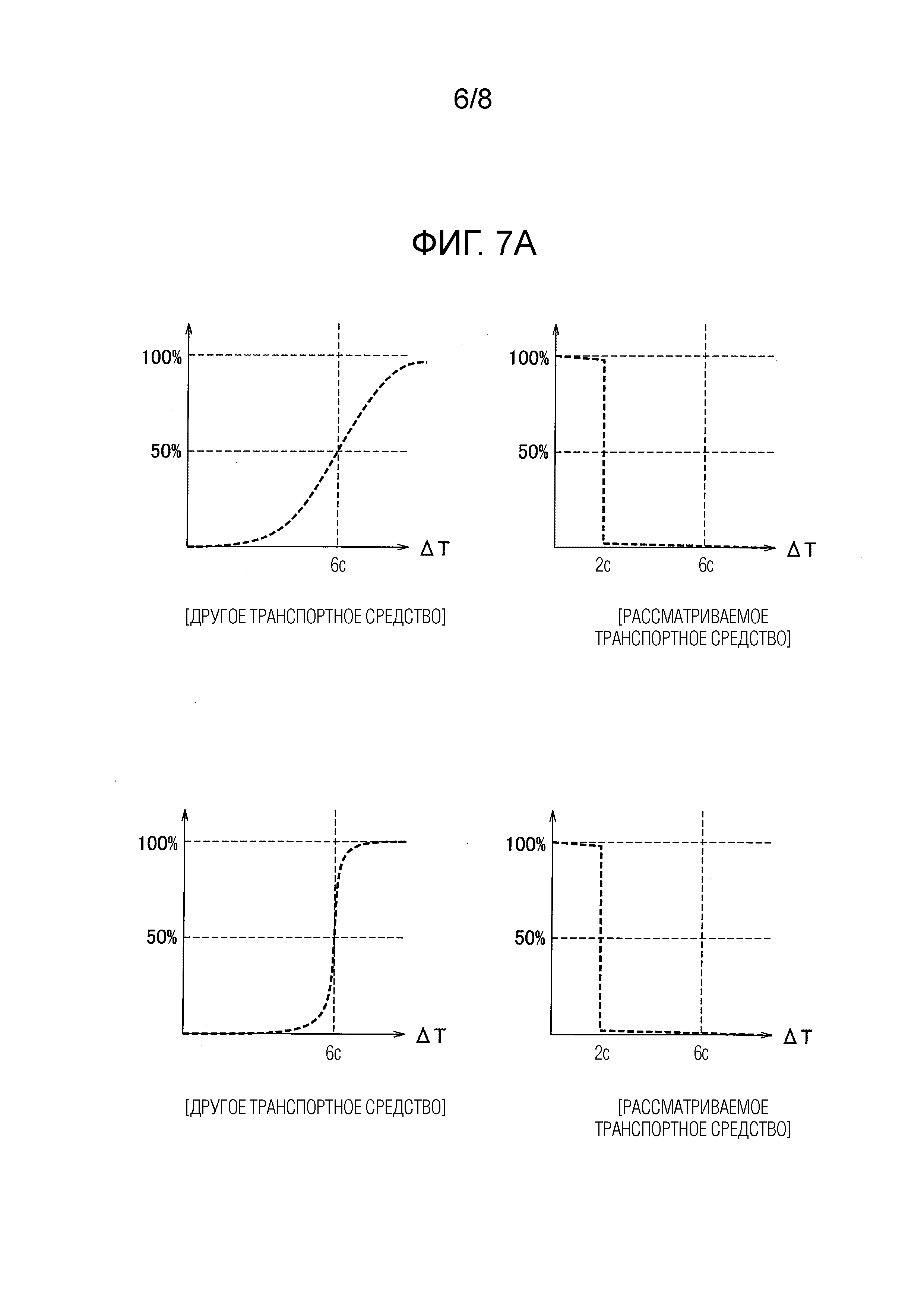
[Фиг. 7A] Фиг. 7A - это вид, показывающий на соответствующих графиках распределение вероятностей более раннего входа в зону пересечения 56 в зависимости от разницы времени достижения ΔT, причем графики в верхней левой части и нижней левой части соответствуют тому случаю, в котором другое транспортное средство 52 входит первым в режиме ручного вождения и в режиме автономного вождения, а графики в верхней правой части и нижней правой части соответствуют случаю, в котором рассматриваемое транспортное средство 51 входит первым, когда не распознается, находится ли другое транспортное средство 52 в режиме автономного вождения.
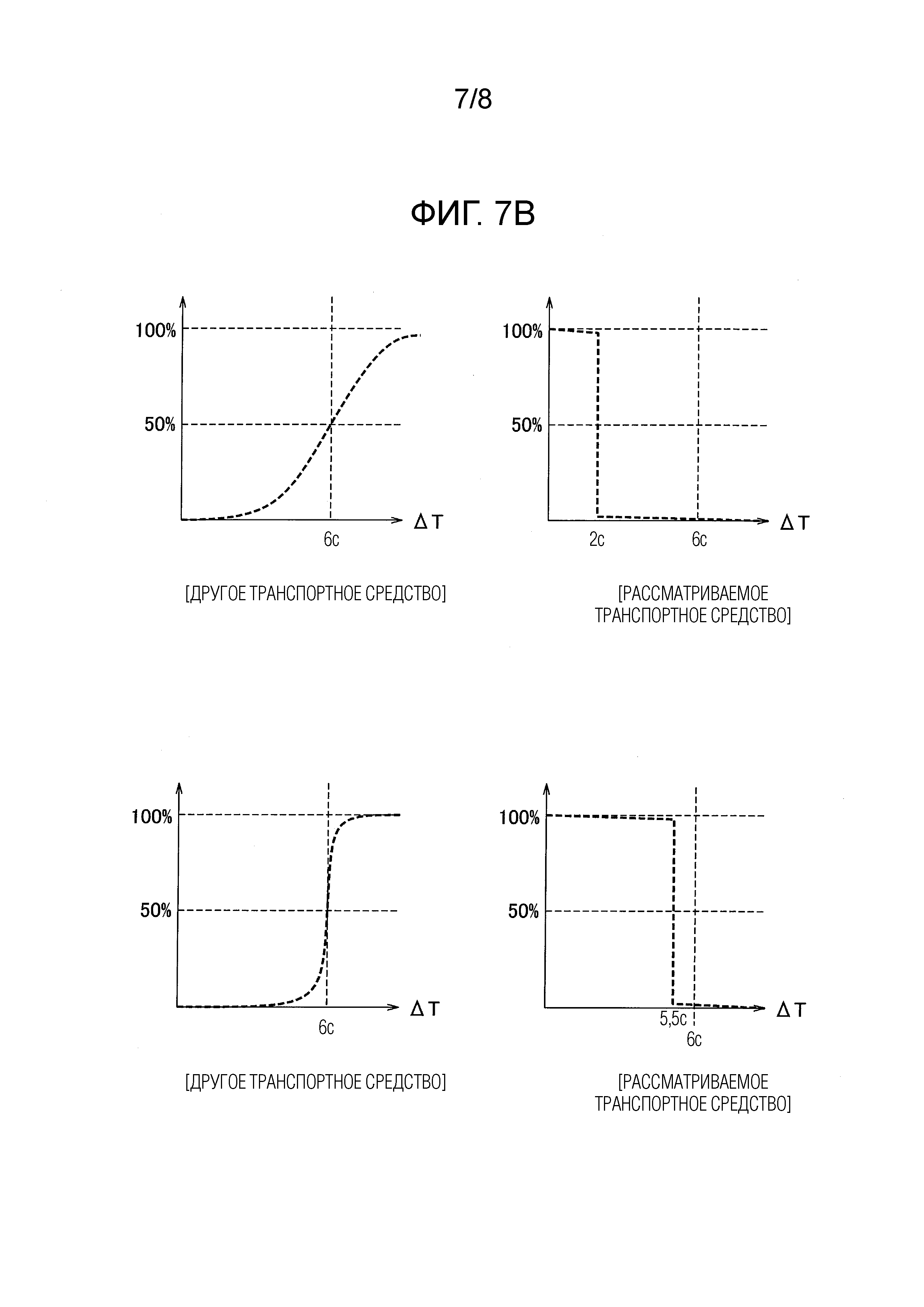
[Фиг. 7B] Фиг. 7B - вид, показывающий на соответствующих графиках распределение вероятностей более раннего входа в зону пересечения 56 в зависимости от разницы времени достижения ΔT, причем графики в верхней левой части и нижней левой части соответствуют тому случаю, в котором другое транспортное средство 52 входит первым в режиме ручного вождения и в режиме автономного вождения, а графики в верхней правой части и нижней правой части соответствуют случаю, в котором рассматриваемое транспортное средство 51 входит первым, когда распознается, находится ли другое транспортное средство 52 в режиме автономного вождения.
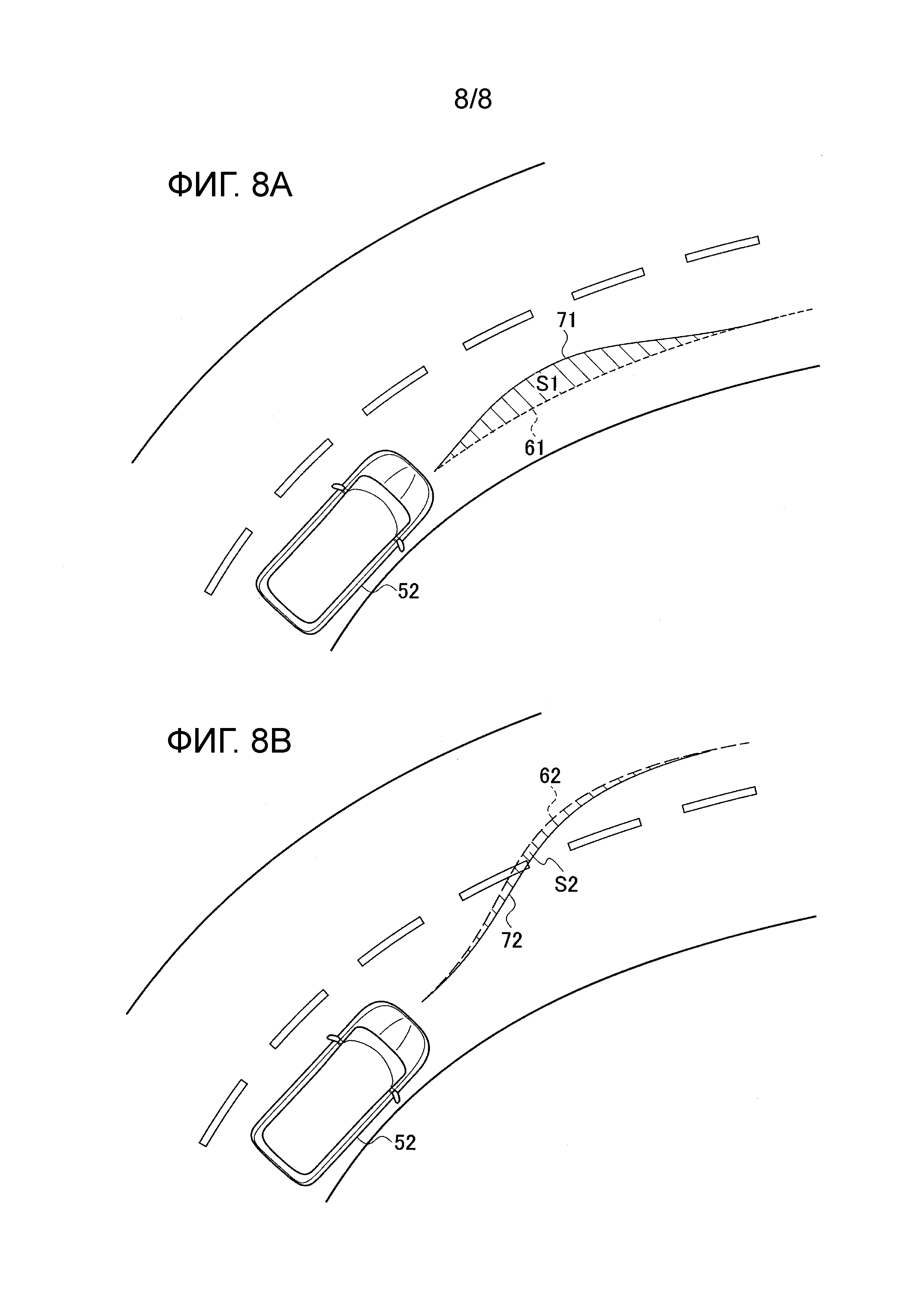
[Фиг. 8A] Фиг. 8A представляет собой вид сверху, иллюстрирующий первичный курс (движения вперед) 61 и эффективный курс (движения вперед) 71 другого транспортного средства 52, движущегося по изогнутой дороге с двумя полосами движения.
[Фиг. 8B] Фиг. 8B - вид сверху, иллюстрирующий первичный курс (смены полосы движения) 62 и эффективный курс (смены полосы движения) 72 другого транспортного средства 52, движущегося по изогнутой дороге с двумя полосами движения.
Описание вариантов осуществления[0009] Далее будут подробно описаны варианты осуществления со ссылкой на чертежи.
[0010] Устройство помощи при движении в соответствии с вариантом осуществления эффективно для использования в такой дорожной ситуации, как показанная, например, на фиг. 4. На фиг. 4 показан случай, при котором рассматриваемое транспортное средство (транспортное средство-хозяин) 51 движется в своей полосе движения по дороге с двумя полосами встречного движения, а другое транспортное средство 52 движется навстречу рассматриваемому транспортному средству 51 на полосе встречного движения. При этом на полосе встречного движения между рассматриваемым транспортным средством 51 и другим транспортным средством 52 присутствует припаркованное транспортное средство 53. Предполагается, что другое транспортное средство 52 временно меняет свой курс направо, чтобы избежать припаркованного транспортного средства 53 и сохранить направление движения. Поскольку рассматриваемое транспортное средство 51 и другое транспортное средство 52 не могут одновременно проехать мимо припаркованного транспортного средства 53, либо рассматриваемое транспортное средство 51, либо другое транспортное средство 52 должно уступить дорогу другому, чтобы пропустить его первым. А именно, поскольку область движения рассматриваемого транспортного средства 51 и область движения другого транспортного средства 52 пересекаются друг с другом в зоне пересечения 56, рассматриваемое транспортное средство 51 и другое транспортное средство 52 не могут одновременно войти в зону пересечения 56, и либо рассматриваемому транспортному средству 51, либо другому транспортному средству 52 необходимо изменить время въезда в зону пересечения 56.
[0011] Рассматриваемое транспортное средство 51 имеет приоритет на этой дороге перед другим транспортным средством 52. Кроме того, предполагаемое время (время достижения) Ta, которое требуется рассматриваемому транспортному средству 51 для достижения зоны пересечения 56, больше, чем предполагаемое время (время достижения) Tb, необходимое другому транспортному средству 52 для достижения зоны пересечения 56. Фиг. 4 иллюстрирует случай, в котором другое транспортное средство 52 может двигаться вперед с учетом времени, даже несмотря на то, что рассматриваемое транспортное средство 51 имеет более высокий приоритет на дороге перед другим транспортным средством 52. В этой дорожной ситуации между рассматриваемым транспортным средством 51 и другим транспортным средством 52 возникает соединение, относительно того, которое из рассматриваемого транспортного средства 51 и другого транспортного средства 52 должно попасть первым в зону пересечения 56.
[0012] Значение, полученное вычитанием времени достижения Tb другого транспортного средства 52 из времени достижения Ta рассматриваемого транспортного средства 51 (ΔT=Ta-Tb), называется здесь «разницей времени достижения».
[0013] На фиг. 7А и фиг. 7В представлены графики, каждый из которых показывает зависимость между разницей времени достижения ΔT (ось абсцисс) и вероятностью попадания первым в зону пересечения 56 (ось ординат). Графики в верхней левой части и нижней левой части на фиг. 7A и фиг. 7B показывают, каждый, вероятность того, что другое транспортное средство 52 войдет в зону пересечения 56 первым. Графики в верхней правой части и нижней правой части на фиг. 7A и фиг. 7B показывают, каждый, вероятность того, что первым в зону пересечения 56 войдет рассматриваемое транспортное средство 51.
[0014] Графики в верхней левой части на фиг. 7А и фиг. 7В иллюстрируют случай, в котором другое транспортное средство 52 движется в режиме ручного вождения, будучи управляемым водителем (человеком). Вероятность того, что другое транспортное средство 52 войдет первым, тем выше, чем больше разница времени достижения ΔT. Другое транспортное средство 52 войдет в зону пересечения 56 с вероятностью примерно 50% в заданное время (например, 6 секунд).
[0015] Однако определение действия водителем (человеком) различается у разных людей, и разброс в определении действия в зависимости от разницы времени достижения ΔT велик. Вероятность того, что другое транспортное средство 52 войдет первым, мало изменяется с изменением разницы времени достижения ΔT. Другими словами, вероятность того, что другое транспортное средство 52 войдет первым, не сразу падает до 0%, когда разница времени достижения ΔT немного меньше, чем заданное время (например, 6 секунд). Вероятность того, что другое транспортное средство 52 войдет первым, падает приблизительно до 0%, когда разница времени достижения ΔT составляет примерно 2 секунды. Тогда рассматриваемому транспортному средству 51 необходимо оценить больший коэффициент безопасности по сравнению с другим транспортным средством 52 в дорожной ситуации, показанной на фиг. 4. В частности, как показано на соответствующих графиках в верхней правой части на фиг. 7A и фиг. 7B, рассматриваемому транспортному средству 51 необходимо определить, следует ли входить в зону пересечения 56 первым, около точки, при которой вероятность вхождения другого транспортного средства 52 первым падает приблизительно до 0% (например, 2 секунды). Другими словами, рассматриваемое транспортное средство 51 может определить, входить ли первым в зону пересечения 56, когда разница времени достижения ΔT составляет меньше 2 секунд.
[0016] Соответствующие графики в левой нижней части на фиг. 7A и фиг. 7B иллюстрируют случай, в котором другое транспортное средство 52 находится в режиме автономного вождения, позволяющем осуществлять автономное вождение без задействования водителя (человека). Режим автономного вождения побуждает другое транспортное средство 52 (компьютер) определять свое собственное действие так, чтобы работать в соответствии с результатом определения. Разброс в определении действия в режиме автономного вождения обычно меньше, чем в режиме ручного вождения. Например, как показано на соответствующих графиках в нижней левой части на фиг. 7A и фиг. 7B, вероятность того, что другое транспортное средство 52 войдет в зону пересечения 56 первым, резко изменяется с 0% на 100% около заданного времени (например, 6 секунд). А именно, рассматриваемое транспортное средство 51 может точно определить вероятность въезда другого транспортного средства 52 на основании разницы времени достижения ΔT, когда другое транспортное средство 52 находится в режиме автономного вождения.
[0017] Однако рассматриваемому транспортному средству 51 все еще необходимо предпринять меры безопасности в отношении всех возможных определений действий другого транспортного средства 52, когда другое транспортное средство 52 находится в режиме автономного вождения, но рассматриваемое транспортное средство 51 не распознает его. Как показано на графике в нижней правой части на фиг. 7А, рассматриваемое транспортное средство 51 должно определить, следует ли входить в зону пересечения 56 первым, около точки (например, 2 секунды), которая меньше, чем заданное время (например, 6 секунд), как и в случае режима ручного вождения. Разница времени достижения ΔT в диапазоне от 2 секунд до 6 секунд при нахождении другого транспортного средства 52 в режиме автономного вождения, как показано на графиках в левой нижней части и правой нижней части на фиг. 7A, может привести к застою («зависанию»), при котором рассматриваемое транспортное средство 51 и другое транспортное средство 52 продолжают уступать дорогу друг другу.
[0018] Рассматриваемое транспортное средство 51, распознав, что другое транспортное средство 52 находится в режиме автономного вождения, может определить, следует ли войти в зону пересечения 56 первым, примерно в точке (например, 5,5 секунды) ближе к заданному времени (например, 6 секунд), как показано на графике в нижней правой части на фиг. 7B. В частности, рассматриваемое транспортное средство 51 может определить, входить ли в зону пересечения 56 первым, когда разница времени достижения ΔT составляет менее 5,5 секунды. Распознание рассматриваемым транспортным средством 51 того, что другое транспортное средство 52 находится в режиме автономного вождения, изменяет пороговое значение, используемое для определения въезда рассматриваемого транспортного средства 51, с 2 секунд на 5,5 секунды. Приближение порогового значения (шесть секунд) другого транспортного средства 52 к пороговому значению (5,5 секунды) рассматриваемого транспортного средства 51 поможет избежать застоя, как показано на графиках в левой нижней части и нижней правой части на фиг. 7B. Изменение порогового значения с 2 секунд на 5,5 секунды после определения рассматриваемым транспортным средством 51 позволяет рассматриваемому транспортному средству 51 войти первым, когда разница времени достижения ΔT находится в диапазоне от 2 секунд до 5,5 секунды, чтобы позволить рассматриваемому транспортному средству 51 двигаться плавно.
[0019] Как показано на графиках в верхней правой части и нижней правой части на фиг. 7B, рассматриваемым транспортным средством 51 можно управлять так, чтобы момент времени, когда рассматриваемое транспортное средство 51 проходит через зону пересечения 56, был задан более ранним в случае, в котором другое транспортное средство 52 находится в режиме автономного вождения, чем в случае, когда другое транспортное средство 52 не находится в режиме автономного вождения.
[0020] Таким образом, вариант осуществления определяет, находится ли другое транспортное средство 52 в режиме автономного вождения, и обнаруживает действие другого транспортного средства 52 в соответствии с результатом такого определения. Вариант осуществления использует разброс в определении действия другого транспортного средства 52 в зависимости от разницы времени достижения ΔT, которое изменяется в зависимости от того, находится ли другое транспортное средство 52 в режиме автономного вождения. В частности, в варианте осуществления используется тот факт, что разброс при автономном вождении меньше разброс при режиме ручного вождения.
[0021] Ниже описано строение устройства помощи при движении в соответствии с вариантом осуществления со ссылкой на фиг. 1. Устройство помощи при движении включает в себя устройство 1 обнаружения объектов, устройство 3 оценки положения рассматриваемого транспортного средства, устройство 4 получения карты и микрокомпьютер 100.
[0022] Устройство 1 обнаружения объектов включает в себя различные виды датчиков обнаружения объекта, установленных на рассматриваемом транспортном средстве 51, таких как лазерный радар, радар миллиметрового диапазона и камера, для обнаружения объектов вокруг рассматриваемого транспортного средства 51. Устройство 1 обнаружения объектов обнаруживает объекты вокруг рассматриваемого транспортного средства 51 с использованием этих датчиков обнаружения объекта. Устройство 1 обнаружения объектов обнаруживает движущиеся объекты, такие как другие транспортные средства, мотоциклы, велосипеды и пешеходы, и неподвижные объекты, такие как припаркованные транспортные средства. Например, устройство 1 обнаружения объектов обнаруживает положение, угловую ориентацию, размер, скорость, ускорение, замедление и скорость рыскания движущегося объекта или неподвижного объекта на основе рассматриваемого транспортного средства. Используемые в данном документе положение, угловая ориентация (угол рыскания), размер, скорость, ускорение, замедление и скорость рыскания объекта совместно называются «поведением» объекта. Устройство 1 обнаружения объектов выводит в качестве результатов обнаружения поведение двумерного объекта на виде сверху (также называемом видом в плане), если смотреть, например, с воздуха над рассматриваемым транспортным средством 51.
[0023] Устройство 3 оценки положения рассматриваемого транспортного средства включает в себя установленный на рассматриваемом транспортном средстве датчик определения положения, такой как система глобального позиционирования (GPS) и средство одометрии, для измерения абсолютного положения рассматриваемого транспортного средства 51. Устройство 3 оценки положения рассматриваемого транспортного средства измеряет абсолютное положение рассматриваемого транспортного средства 51, которое является положением, угловой ориентацией и скоростью рассматриваемого транспортного средства 51, на основании заданной контрольной точки с использованием датчика определения положения.
[0024] Устройство 4 получения карты получает картографическую информацию, указывающую структуру дороги, по которой движется рассматриваемое транспортное средство 51. Устройство 4 получения картографической информации может содержать базу данных карт, хранящую картографическую информацию, или может получать картографическую информацию от внешнего сервера данных карт через облачные вычисления. Картографическая информация, полученная устройством 4 получения карты, включает в себя различные фрагменты информации о структуре дороги, такие как абсолютные положения полос движения, и развязки и взаимное относительное расположение полос движения.
[0025] Микрокомпьютер 100 (пример контроллера) обнаруживает действие другого транспортного средства в соответствии с результатами обнаружения, полученными устройством 1 обнаружения объектов и устройством 3 оценки положения рассматриваемого транспортного средства, и информацией, полученной устройством 4 получения карты, формирует (генерирует) маршрут рассматриваемого транспортного средства 51 в зависимости от обнаруженного действия другого транспортного средства и помогает рассматриваемому транспортному средству 51 при перемещении в соответствии со сформированным маршрутом.
[0026] Вариант осуществления в качестве примера приводит микрокомпьютер 100 в качестве устройства помощи при движении для управления рассматриваемым транспортным средством 51, но не ограничивается этим случаем. Например, микрокомпьютер 100 может быть применимым в случае функционирования в качестве устройства обнаружения действия для обнаружения действия другого транспортного средства. Микрокомпьютер 100, таким образом, может в итоге выводить обнаруженное действие другого транспортного средства без формирования маршрута и управления движением по маршруту, сгенерированному для рассматриваемого транспортного средства 51.
[0027] Микрокомпьютер 100 является микрокомпьютером общего назначения, включающим в себя центральный процессор (ЦП), память и блок ввода-вывода. На микрокомпьютере 100 установлена компьютерная программа (программа помощи при движении) с тем, чтобы он функционировал в качестве устройства помощи при движении. Когда эта компьютерная программа исполняется, микрокомпьютер 100 функционирует в виде множества схем (2a, 2b, 5, 10, 21 и 22) обработки информации, включенных в состав устройства помощи при движении. Хотя вариант осуществления иллюстрируется случаем, в котором установлено программное обеспечение для создания схем (2a, 2b, 5, 10, 21 и 22) обработки информации, включенных в состав устройства помощи при движении, может быть подготовлено аппаратное обеспечение, специально предназначенное для выполнения каждой обработки информации, как описано ниже, для составления схем (2a, 2b, 5, 10, 21 и 22) обработки информации. Соответствующие схемы (2a, 2b, 5, 10, 21 и 22) обработки информации могут состоять из отдельных аппаратных средств. Схемы (2a, 2b, 5, 10, 21 и 22) обработки информации также могут служить в качестве электронного блока управления (ЭБУ), используемого для другой управляющей обработки в отношении транспортного средства.
[0028] Микрокомпьютер 100 включает в себя в качестве соответствующих схем (2a, 2b, 5, 10, 21 и 22) обработки информации блок 2a интеграции обнаружения, блок 2b отслеживания объекта, блок 5 вычисления местоположения на карте, блок 10 прогнозирования действия, блок 21 формирования маршрута рассматриваемого транспортного средства и блок 22 управления транспортным средством. Блок 10 прогнозирования действия включает в себя блок 11 определения поведения, блок 12 прогнозирования вероятности действия, первый блок 13 коррекции вероятности действия, второй блок 15 коррекции вероятности действия, блок 16 прогнозирования курса, блок 17 оценки коэффициента правдоподобия, блок 18 определения пересечения и блок 19 определения автономного вождения. Когда в качестве устройства обнаружения действия используется микрокомпьютер 100 для обнаружения действия другого транспортного средства, схемы обработки информации, такие как блок 21 формирования маршрута рассматриваемого транспортного средства и блок 22 управления транспортным средством, не обязательно входят в состав.
[0029] Блок 2а интеграции обнаружения объединяет (интегрирует) несколько результатов обнаружения, полученных соответствующими датчиками обнаружения объекта, включенными в состав устройства 1 обнаружения объектов, для вывода единственного результата обнаружения на один объект. В частности, блок 2a интеграции обнаружения вычисляет поведение объекта, которое является наиболее разумным и имеет наименьшую ошибку среди элементов поведения объекта, обнаруженного соответствующими датчиками обнаружения объекта, с учетом ошибок, характерных для соответствующих датчиков обнаружения объекта. Блок 2а интеграции обнаружения совместно оценивает результаты обнаружения, полученные различными датчиками, чтобы получить более точный результат обнаружения для каждого объекта обычным методом сбора и обобщения данных от датчиков.
[0030] Блок 2b отслеживания объекта отслеживает каждый объект, обнаруженный устройством 1 обнаружения объектов. В частности, блок 2b отслеживания объекта определяет одинаковость объекта (его отображения), обнаруженного через определенные промежутки времени, в соответствии с поведением объекта, выводимым в разные моменты времени, с использованием результата обнаружения, интегрированного блоком 2а интеграции обнаружения, и обнаруживает поведение объекта в соответствии с результатом отображения. Каждый элемент поведения объекта, выводимого в разные моменты времени, сохраняется в памяти в микрокомпьютере 100 и используется для прогнозирования курса, описанного ниже.
[0031] Блок 5 вычисления местоположения на карте оценивает положение и угловую ориентацию рассматриваемого транспортного средства 51 на карте в соответствии с абсолютным положением рассматриваемого транспортного средства 51, полученным устройством 3 оценки положения рассматриваемого транспортного средства, и данными карты, полученными устройством 4 получения карты. Например, блок 5 вычисления местоположения на карте указывает дорогу, по которой движется рассматриваемое транспортное средство 51, и полосу движения рассматриваемого транспортного средства 51 на этой дороге.
[0032] Блок 10 прогнозирования действия прогнозирует действие движущегося объекта вокруг рассматриваемого транспортного средства 51 в соответствии с результатом обнаружения, полученным блоком 2а интеграции обнаружения, и положением рассматриваемого транспортного средства 51, указанным блоком 5 вычисления местоположения на карте. Конкретная конфигурация блока 10 прогнозирования действия подробно описана ниже.
[0033] Блок 11 определения поведения определяет положение и поведение объекта на карте в соответствии с положением рассматриваемого транспортного средства 51 на карте и поведением объекта, полученным блоком 2а интеграции обнаружения. Блок 11 определения поведения определяет, что объект является движущимся объектом, когда положение объекта на карте изменяется с течением времени, и определяет атрибут движущегося объекта (например, транспортного средства или пешехода) в соответствии с размером и скоростью движущегося объекта. Когда определено, что движущийся объект является другим движущимся транспортным средством, блок 11 определения поведения указывает дорогу, по которой движется это другое транспортное средство, и его полосу движения.
[0034] Когда положение объекта на карте не изменяется с течением времени, блок 11 определения поведения определяет, что объект является неподвижным (стационарным) объектом, и определяет атрибут неподвижного объекта (например, припаркованного транспортного средства или пешехода) в соответствии с положением, угловой ориентацией и размером неподвижного объекта на карте.
[0035] Блок 12 прогнозирования вероятности действия прогнозирует вероятность действия другого транспортного средства на основе карты. Блок 12 прогнозирования вероятности действия прогнозирует намерение действия, которое другое транспортное средство предпримет следующим, на основе структуры дороги, включенной в картографическую информацию и информацию о полосе движения, которой принадлежит другое транспортное средство, и вычисляет первичный курс другого транспортного средства в соответствии с прогнозируемым намерением действия на основе структуры дороги. Используемый здесь термин «вероятность действия» относится к понятию высшего уровня, включающему в себя намерение действия и первичный курс. Термин «первичный курс» охватывает профили положений другого транспортного средства в разные моменты времени, а также профили скоростей другого транспортного средства в соответствующих положениях.
[0036] Например, когда другое транспортное средство движется по одной изогнутой дороге с одной полосой движения, блок 12 прогнозирования вероятности действия прогнозирует намерение действия следования по полосе (движения вперед) и вычисляет курс вдоль полосы движения на карте как первичный курс. Когда другое транспортное средство движется по одной изогнутой дороге с множеством полос движения, блок 12 прогнозирования вероятности действия прогнозирует намерение действия движения вперед и намерение действия по изменению полосы движения вправо или влево (смене полосы). Первичный курс другого транспортного средства с намерением действия по смене полосы - это курс смены полос движения на основе структуры дороги и заданного периода времени смены полосы движения. Когда другое транспортное средство движется к перекрестку, блок 12 прогнозирования вероятности действия прогнозирует намерение действия, включающего в себя движение вперед, поворот направо и поворот налево, и вычисляет курс движения вперед, курс правого поворота и курс левого поворота в качестве первичного курса на основе структуры дороги на перекрестке на карте. Вычисление «первичного курса» учитывает структуру дороги, но не учитывает поведение другого транспортного средства, интегрированное блоком 2a интеграции обнаружения.
[0037] Первый блок 13 коррекции вероятности действия учитывает неподвижный объект, обнаруженный устройством 1 обнаружения объектов, чтобы скорректировать вероятность действия, спрогнозированного блоком 12 прогнозирования вероятности действия. В частности, первый блок 13 коррекции вероятности действия определяет, перекрываются ли первичный курс другого транспортного средства и положение неподвижного объекта. Когда эти первичный курс и положение перекрываются друг с другом, первый блок 13 коррекции вероятности действия также добавляет намерение действия и первичный курс другого транспортного средства 52 для того, чтобы избежать неподвижного объекта.
[0038] В частности, в дорожной ситуации, показанной на фиг. 4, блок 12 прогнозирования вероятности действия прогнозирует намерение действия (движения вперед) другого транспортного средства 52 и первичный курс (движение вперед) при движении по полосе движения. Первый блок 13 коррекции вероятности действия определяет, что первичный курс (движение вперед) другого транспортного средства 52 перекрывается с положением припаркованного транспортного средства 53 в качестве неподвижного объекта. Тогда первый блок 13 коррекции вероятности действия также добавляет намерение действия другого транспортного средства 52 (первичный курс 63) для временного изменения курса в направлении вправо, чтобы избежать припаркованного транспортного средства 53 и сохранить направление движения.
[0039] Когда устройством 1 обнаружения объектов обнаружен еще один движущийся объект (не показан) одновременно с другим транспортным средством 52, показанным на фиг. 4, первый блок 13 коррекции вероятности действия учитывает этот еще один движущийся объект для корректировки вероятности действия, спрогнозированного блоком 12 прогнозирования вероятности действия.
[0040] Блок 18 определения пересечения определяет, пересекаются ли друг с другом область движения рассматриваемого транспортного средства 51 и область движения другого транспортного средства 52. Когда соответствующие области движения пересекаются друг с другом, блок 18 определения пересечения вычисляет разницу во времени достижения (разницу времени достижения ΔT) между рассматриваемым транспортным средством 51 и другим транспортным средством 52 зоны пересечения 56, в которой область движения рассматриваемого транспортного средства 51 и область движения другого транспортного средства 52 пересекаются друг с другом.
[0041] В частности, блок 18 определения пересечения прогнозирует время (время достижения) Tb, которое требуется другому транспортному средству 52 для достижения зоны пересечения 56, в соответствии с первичным курсом 63, а также положением и поведением другого транспортного средства 52 на карта. Блок 18 определения пересечения также прогнозирует время (время достижения) Ta, которое требуется рассматриваемому транспортному средству 51 для достижения зоны пересечения 56, в соответствии с положением, скоростью, а также ускорением и замедлением рассматриваемого транспортного средства 51 на карте. Блок 18 определения пересечения вычитает время достижения Tb другого транспортного средства 52 из времени достижения Ta рассматриваемого транспортного средства 51, чтобы вычислить разницу времени достижения ΔT.
[0042] Блок 19 определения автономного вождения (контроллер) получает характеристики вождения другого транспортного средства 52 и определяет, находится ли другое транспортное средство 52 в режиме автономного вождения. В частности, блок 19 определения автономного вождения определяет, находится ли другое транспортное средство 52 в режиме ручного вождения, которым управляет водитель (человек), или в режиме автономного вождения, позволяющем осуществлять автономное вождение без операции вождения водителем (человеком).
[0043] Блок 19 определения автономного вождения может определять, находится ли другое транспортное средство 52 в режиме автономного вождения, только тогда, когда блок 18 определения пересечения определяет, что область движения рассматриваемого транспортного средства 51 и область движения другого транспортного средства 52 пересекаются друг с другом. Это может уменьшить число других транспортных средств 52, на которые нацелен блок 19 определения автономного вождения, чтобы уменьшить вычислительную нагрузку по обработке.
[0044] Блок 19 определения автономного вождения использует устройство связи устройства связи между транспортными средствами (vehicle-to-vehicle, V2V) в качестве датчика для получения характеристик вождения другого транспортного средства 52. Таким образом, блок 19 определения автономного вождения может определять, находится ли другое транспортное средство 52 в режиме автономного вождения, в соответствии с характеристиками вождения другого транспортного средства 52. Блок 19 определения автономного вождения также может обнаруживать в качестве характеристик вождения другого транспортного средства 52 любое уведомление, извещающее извне о том, что другое транспортное средство находится в режиме автономного вождения, или обнаруживать любое указание, указывающее извне на режим автономного вождения, с любым отображением или голосом, например, «пожалуйста, продолжайте», для уведомления других транспортных средств (других людей) о намерении.
[0045] Блок 19 определения автономного вождения получает поведение другого транспортного средства в качестве характеристик вождения другого транспортного средства 52 с тем, чтобы определять, находится ли другое транспортное средство в режиме автономного вождения, в соответствии с поведением другого транспортного средства 52. Например, блок 19 определения автономного вождения может определить, что другое транспортное средство 52 находится в режиме автономного вождения, когда другое транспортное средство 52 демонстрирует такие характеристики действия, как отсутствие прерывистого торможения, небольшое изменение ускорения с точки зрения времени в ходе замедления, постоянное расстояние или скорость, небольшое отклонение или дисперсия в поведении другого транспортного средства 52, высокая стабильность поведения и механическое поведение. Причина этого заключается в том, что режим автономного вождения может иметь характеристики, позволяющие управлять движением с меньшими колебаниями, демонстрируя небольшой рывок или отсутствие рывков (различное во времени значение ускорения) по сравнению со случаем режима ручного вождения. Блок 19 определения автономного вождения использует характеристики вождения другого транспортного средства 52, которые варьируются в зависимости от режима ручного вождения (человеком) или режима автономного вождения.
[0046] Блок 19 определения автономного вождения может оценивать характеристики вождения посредством описанного ниже процесса и корректировать действие (намерение) другого транспортного средства 52 в соответствии с оцененными характеристиками вождения, независимо от того, находится ли другое транспортное средство 52 в режиме автономного вождения. Рассматриваемое транспортное средство 51 может быть вынуждено временно остановиться в наиболее безопасный момент времени относительно всех возможных характеристик вождения, когда характеристики вождения другого транспортного средства 52 не могут быть подтверждены. Тогда блок 19 определения автономного вождения может оценивать характеристики вождения другого транспортного средства 52 в соответствии с поведением другого транспортного средства 52 в ответ на действие остановки. Блок 19 определения автономного вождения может корректировать время начала движения и курс рассматриваемого транспортного средства 51 в соответствии с оцененными характеристиками вождения.
[0047] Второй блок 15 коррекции вероятности действия дополнительно прогнозирует первичный курс (последнее перемещение), который(ое) другое транспортное средство 52 предпримет, чтобы замедлиться или остановиться перед зоной пересечения 56 и войти в зону пересечения 56 после того, как рассматриваемое транспортное средство 51 пройдет через зону пересечения 56, в соответствии с намерением действия (последним перемещением) дать дорогу рассматриваемому транспортному средству 51, когда блок 18 определения пересечения определяет, что рассматриваемое транспортное средство 51 и другое транспортное средство 52 пересекаются друг с другом. В то же время, второй блок 15 коррекции вероятности действия дополнительно прогнозирует первичный курс (более раннее перемещение), который(ое) другое транспортное средство 52 предпримет, чтобы войти в зону пересечения 56 без замедления перед зоной пересечения 56, в соответствии с намерением действия (более ранним перемещением) прохождения через зону пересечения 56 ранее рассматриваемого транспортного средства 51.
[0048] Затем второй блок 15 коррекции вероятности действия оценивает коэффициент правдоподобия соответствующих вероятностей действия, спрогнозированных блоком 12 прогнозирования вероятности действия, первым блоком 13 коррекции вероятности действия и вторым блоком 15 коррекции вероятности действия, в соответствии с результатом определения того, находится ли другое транспортное средство 52 в режиме автономного вождения. В частности, в дорожной ситуации, в которой устанавливается соединение между рассматриваемым транспортным средством 51 и другим транспортным средством 52, второй блок 15 коррекции вероятности действия оценивает коэффициент правдоподобия по отношению к альтернативно определенным вероятностям действия. Например, второй блок 15 коррекции вероятности действия оценивает коэффициент правдоподобия по отношению к каждой из вероятности действия (последнего перемещения) и вероятности действия (более раннего перемещения) в соответствии с результатом определения того, находится ли другое транспортное средство 52 в режиме автономного вождения, когда рассматриваемое транспортное средство 51 и другое транспортное средство 52 перекрываются друг с другом в зоне пересечения 56. Второй блок 15 коррекции вероятности действия оценивает коэффициент правдоподобия, учитывая эмпирическое правило или статистический результат, демонстрирующий, что разброс в определении действия в режиме автономного вождения обычно меньше, чем в режиме ручного вождения.
[0049] Второй блок 15 коррекции вероятности действия также оценивает коэффициент правдоподобия по отношению к соответствующим вероятностям действия в соответствии с результатом определения того, находится ли другое транспортное средство 52 в режиме автономного вождения, и разницей времени достижения ΔT. В частности, второй блок 15 коррекции вероятности действия вычисляет предполагаемое время (время достижения) Ta, которое требуется рассматриваемому транспортному средству 51 на достижение зоны пересечения 56, в соответствии с положением и скоростью рассматриваемого транспортного средства 51 на карте. Второй блок 15 коррекции вероятности действия также вычисляет предполагаемое время (время достижения) Tb, которое требуется другому транспортному средству 52 на достижение зоны пересечения 56, в соответствии с положением и поведением другого транспортного средства на карте с тем, чтобы вычислить разницу времени достижения ΔT (= Ta - Tb). Второй блок 15 коррекции вероятности действия считывает данные, указанные на четырех графиках на фиг. 7B, предварительно сохраненных в микрокомпьютере 100. Второй блок 15 коррекции вероятности действия назначает результат определения того, находится ли другое транспортное средство 52 в режиме автономного вождения, и разность времени достижения ΔT считываемым данным, чтобы оценить коэффициент правдоподобия каждой из вероятности действия (последнего перемещения) и вероятности действия (более раннего перемещения).
[0050] Например, когда другое транспортное средство 52 находится в режиме ручного вождения и разница времени достижения ΔT составляет 5,5 секунды, второй блок 15 коррекции вероятности действия обращается к графику в верхней левой части на фиг. 7B, чтобы оценить, что коэффициент правдоподобия (вероятность) по отношению к вероятности действия (более раннего перемещения) другого транспортного средства 52 составляет примерно 40%. Когда другое транспортное средство 52 находится в режиме автономного вождения и разница времени достижения ΔT составляет 5,5 секунды, второй блок 15 коррекции вероятности действия обращается к графику в левой нижней части на фиг. 7B, предполагая, что коэффициент правдоподобия (вероятность) по отношению к вероятности действия (более раннего перемещения) другого транспортного средства 52 составляет примерно 0%.
[0051] Как описано выше, второй блок 15 коррекции вероятности действия учитывает уровень разброса в определении действия, которое изменяется в зависимости от того, находится ли другое транспортное средство 52 в режиме автономного вождения, чтобы оценить коэффициент правдоподобия соответствующих вероятностей действия другого транспортного средства 52 с высокой точностью. Оценка вероятности действия (более раннего перемещения) другого транспортного средства 52 позволяет оказать помощь при движении рассматриваемому транспортному средству 51, такую как управление ускорением/замедлением, предварительное замедление, управление рулевым управлением и управление боковым положением, или уведомление или предупреждение пассажиру о том, движется ли другое транспортное средство 52 первым, так чтобы пассажир мог чувствовать плавное движение.
[0052] Блок 16 прогнозирования курса прогнозирует курс (эффективный курс), по которому будет следовать другое транспортное средство 52, в соответствии с поведением, обнаруженным блоком 11 определения поведения. В частности, блок 16 прогнозирования курса вычисляет эффективный курс, когда предполагается, что другое транспортное средство 52 предпринимает действие, основываясь на прогнозируемом намерении действия, с помощью традиционного метода оценки состояния, такого как фильтрация Калмана. Используемый здесь термин «эффективный курс» охватывает профили положений другого транспортного средства 52 в разные моменты времени, а также профили скоростей другого транспортного средства 52 в соответствующих положениях, как и в случае первичного курса. Эффективный курс и первичный курс являются общими в том, что другое транспортное средство 52 будет следовать, но отличаются друг от друга тем, что эффективный курс рассчитывается с учетом поведения другого транспортного средства 52, в то время как первичный курс рассчитывается без учета поведения другого транспортного средства 52.
[0053] Фиг. 8А и фиг. 8В иллюстрируют первичные курсы (61 и 62) для другого транспортного средства 52 в качестве примеров, рассчитанных в соответствии с намерением действия и структурой дороги без учета поведения другого транспортного средства 52. Поскольку текущая угловая ориентация (угол рыскания) другого транспортного средства 52 не принимается во внимание, например, соответствующие первичные курсы (61 и 62) проходят в разных направлениях от текущего положения другого транспортного средства 52. Тогда блок 16 прогнозирования курса учитывает поведение другого транспортного средства 52 для вычисления курса (эффективного курса), соответствующего описанному выше намерению действия. А именно, блок 16 прогнозирования курса вычисляет эффективный курс, когда другое транспортное средство 52 предполагается предпринимающим действие, соответствующее описанному выше намерению действия.
[0054] Угловая ориентация (угол рыскания) другого транспортного средства 52, показанного на фиг. 8A и фиг. 8B, отклоняется влево от первичного курса 61 другого транспортного средства 52, следующего по полосе движения. Скорость другого транспортного средства 52 имеет только компоненту скорости в направлении движения, а компонента скорости в направлении по ширине транспортного средства равна нулю. Таким образом, другое транспортное средство 52 находится в состоянии совершения перемещения вперед. Когда другое транспортное средство 52 движется в соответствии с намерением действия следования по полосе движения на основе вышеуказанных угловой ориентации и скорости, другое транспортное средство 52 движется по эффективному курсу 71, который начинает покидать первичный курс 61 влево и затем возвращается, в итоге совпадая с первичным курсом 61, как показано на фиг. 8A. Другими словами, предполагается, что другое транспортное средство 52 следует по скорректированному курсу (курсу перерегулирования), созданному так, что отклонение от полосы движения корректируется. Таким образом, блок 16 прогнозирования курса прогнозирует эффективный курс 71, согласующийся с намерением действия следования по полосе движения (перемещения вперед), на основе угловой ориентации (угла рыскания) и скорости другого транспортного средства 52.
[0055] Когда другое транспортное средство 52 движется в соответствии с намерением действия смены полос на основе той же угловой ориентации и скорости, другое транспортное средство 52 движется по эффективному курсу 72, который начинает поворачивать в направлении влево, чтобы сместиться в левую полосу, а затем делает небольшой поворот вправо, чтобы скорректировать направление так, чтобы следовать по левой полосе, как показано на фиг. 8B. А именно, созданный эффективный курс 72 включает в себя кривую клотоиды левого поворота и кривую клотоиды правого поворота, начиная с состояния, в котором угол поворота рулевого управления находится в нейтральном положении. Таким образом, эффективный курс 72 используется для смены полосы, которая занимает по существу то же время, что и «заданный период времени смены полосы», используемый для вычисления курса 62 смены полосы. Кривые, используемые при создании эффективного курса, не обязательно являются кривыми клотоиды и могут быть любыми другими кривыми. Как показано на фиг. 8В, эффективный курс 72 имеет по существу такую же конфигурацию, что и первичный курс 62 для смены полос.
[0056] Блок 16 прогнозирования курса вычисляет соответствующий намерению действия курс (эффективный курс), учитывая поведение другого транспортного средства 52 в отношении соответствующих вероятностей действия, спрогнозированных блоком 12 прогнозирования вероятности действия, первым блоком 13 коррекции вероятности действия и вторым блоком 15 коррекции вероятности действия, таким же образом, как и на фиг. 8A и фиг. 8B. Например, в дорожной ситуации, показанной на фиг. 4, блок 16 прогнозирования курса вычисляет эффективный курс (более раннее перемещение), который займет другое транспортное средство 52, чтобы пройти через зону пересечения 56 раньше рассматриваемого транспортного средства 51, и эффективный курс (последнее перемещение), который займет другое транспортное средство 52, чтобы пройти через зону пересечения 56 после рассматриваемого транспортного средства 51, исходя из положения и скорости другого транспортного средства 52 на карте.
[0057] Хотя вышеупомянутые случаи учитывают положение, угловую ориентацию и скорость в качестве примеров поведения другого транспортного средства 52, соответствующие эффективные курсы могут быть рассчитаны с учетом ускорения или замедления другого транспортного средства 52 вместо них. Например, можно предположить, что замедление при смене полосы больше, чем в случае перемещения вперед.
[0058] Блок 17 оценки коэффициента правдоподобия сравнивает каждую вероятность действия, спрогнозированную блоком 12 прогнозирования вероятности действия, первым блоком 13 коррекции вероятности действия и вторым блоком 15 коррекции вероятности действия, с поведением другого транспортного средства 52, интегрированным блоком 2а интеграции обнаружения, чтобы обнаруживать действие другого транспортного средства 52. Блок 17 оценки коэффициента правдоподобия дополнительно обнаруживает действие другого транспортного средства 52 также с учетом коэффициента правдоподобия, спрогнозированного вторым блоком 15 коррекции вероятности действия.
[0059] В частности, блок 17 оценки коэффициента правдоподобия сравнивает первичный курс с эффективным курсом для каждой из вероятностей действия, спрогнозированных блоком 12 прогнозирования вероятности действия, первым блоком 13 коррекции вероятности действия и вторым блоком 15 коррекции вероятности действия. Затем блок 17 оценки коэффициента правдоподобия вычисляет коэффициент правдоподобия соответствующих вероятностей действий на основе разницы между первичным курсом и эффективным курсом. Вычисленный коэффициент правдоподобия тем выше, чем меньше разница между первичным курсом и эффективным курсом.
[0060] Блок 17 оценки коэффициента правдоподобия дополнительно взвешивает коэффициент правдоподобия соответствующих вероятностей действия в зависимости от коэффициента правдоподобия, спрогнозированного вторым блоком 15 коррекции вероятности действия. Например, блок 17 оценки коэффициента правдоподобия умножает коэффициент правдоподобия соответствующих вероятностей действия на коэффициент правдоподобия, спрогнозированный вторым блоком 15 коррекции вероятности действия, используемый в качестве коэффициента. Это вычисление может объединять коэффициент правдоподобия, спрогнозированный вторым блоком 15 коррекции вероятности действия, с коэффициентом правдоподобия, оцененным блоком 17 оценки коэффициента правдоподобия. Например, когда другое транспортное средство 52 находится в режиме автономного вождения и разница времени достижения ΔT меньше 5,5 секунды, блок 17 оценки коэффициента правдоподобия умножает коэффициент правдоподобия вероятности действия (последнего перемещения) на больший коэффициент, чем коэффициент правдоподобия вероятности действия (более раннего перемещения).
[0061] Вероятность действия с наибольшим коэффициентом правдоподобия может быть определена как наиболее разумная, когда принимается во внимание результат определения того, находится ли другое транспортное средство 52 в режиме автономного вождения. Тогда блок 17 оценки коэффициента правдоподобия определяет, что вероятность действия, оцененного как имеющее самый высокий коэффициент правдоподобия, является действием, которое выполняет другое транспортное средство 52. Разница между первичным курсом и эффективным курсом вычисляется, например, в соответствии с суммой различий между профилями положений или скоростями соответствующих курсов. На фиг. 8А и 8В показаны площади S1 и S2, каждая из которых представляет собой сумму, полученную интегрированием разностей в положениях между первичным курсом и эффективным курсом. Разности в положениях могут быть определены как меньшие, так как площадь меньше, так что получается более высокий коэффициент правдоподобия. В качестве другого примера, когда разности в положениях малы, но профили скоростей сильно различаются, получается меньший коэффициент правдоподобия. Коэффициент правдоподобия является примером показателя, указывающего на возможность того, что вероятность действия в результате становится истинной, и вместо коэффициента правдоподобия может использоваться любое другое указание.
[0062] Блок 17 оценки коэффициента правдоподобия также сравнивает первичный курс с эффективным курсом для каждой из вероятностей действия, спрогнозированных блоком 12 прогнозирования вероятности действия, первым блоком 13 коррекции вероятности действия и вторым блоком 15 коррекции вероятности действия, чтобы вычислить коэффициент правдоподобия, и умножает вычисленный коэффициент правдоподобия на коэффициент (коэффициент правдоподобия, спрогнозированный вторым блоком 15 коррекции вероятности действия). Затем блок 17 оценки коэффициента правдоподобия определяет, что вероятность действия, оцененного как имеющее наивысший коэффициент правдоподобия, является действием, которое совершает другое транспортное средство 52.
[0063] Как описано выше, блок 10 прогнозирования действия обнаруживает действие другого транспортного средства 52 в соответствии с коэффициентом правдоподобия соответствующих вероятностей действия, оцененных блоком 17 оценки коэффициента правдоподобия. Термин «действие другого транспортного средства» охватывает профили курса и скорости другого транспортного средства. Курс другого транспортного средства 52 относится к профилям положений другого транспортного средства 52 в разные моменты времени.
[0064] Блок 21 формирования маршрута рассматриваемого транспортного средства формирует (генерирует) маршрут рассматриваемого транспортного средства 51 на основании действия другого транспортного средства 52, обнаруженного блоком 10 прогнозирования действия. Например, в дорожной ситуации, показанной на фиг. 4, когда блок 10 прогнозирования действия обнаруживает действие более раннего перемещения другого транспортного средства 52, блок 21 формирования маршрута рассматриваемого транспортного средства генерирует маршрут, по которому следует рассматриваемое транспортное средство 51, замедляясь или останавливаясь перед зоной пересечения 56, а затем входя в зону пересечения 56 после проезда другого транспортного средства 52. Таким образом, блок 21 формирования маршрута рассматриваемого транспортного средства может генерировать маршрут, по которому может плавно следовать рассматриваемое транспортное средство 51, избегая столкновения с другим транспортным средством 52 и избегая внезапного замедления или быстрого руления, требуемого в ответ на поведение другого транспортного средства 52. Когда блок 10 прогнозирования действия обнаруживает действие последнего перемещения другого транспортного средства 52, блок 21 формирования маршрута рассматриваемого транспортного средства генерирует маршрут, по которому следует рассматриваемое транспортное средство 51, чтобы войти в зону пересечения 56 раньше другого транспортного средства 52 без замедления или остановиться перед зоной пересечения 56. Это формирование маршрута позволяет избежать застоя («зависания»), чтобы предотвратить помехи потоку транспорта. Термин «маршрут рассматриваемого транспортного средства 51» охватывает профили положений рассматриваемого транспортного средства 51 в разные моменты времени, а также профили скоростей рассматриваемого транспортного средства 51 в соответствующих положениях.
[0065] Этот вариант осуществления обнаруживает действие другого транспортного средства 52, включая курс другого транспортного средства 52, согласно поведению другого транспортного средства 52 на карте. Таким образом, формирование маршрута для рассматриваемого транспортного средства 51 на основании курса другого транспортного средства 52 соответствует формированию маршрута на основании изменения относительного расстояния до другого транспортного средства 52, ускорения или замедления, или разницы в угле ориентации.
[0066] Например, в дорожной ситуации, показанной на фиг. 4, когда другое транспортное средство 52 остается в полосе движения и начинает замедляться, можно предположить, что поведение другого транспортного средства 52 указывает на то, что другое транспортное средство 52 желает уступить дорогу рассматриваемому транспортному средству 51, чтобы позволить рассматриваемому транспортному средству 51 двигаться вперед. В этом случае генерирование маршрута рассматриваемого транспортного средства 51 или оказание помощи при движении рассматриваемому транспортному средству 51 с учетом намерения действия другого транспортного средства 52 позволяет рассматриваемому транспортному средству 51 продолжать движение без замедления или ускоряться так, чтобы первым пройти через зону пересечения 56. Это управление позволяет избежать ситуации, в которой рассматриваемое транспортное средство 51 и другое транспортное средство 52 уступают дорогу друг другу, чтобы соответственно способствовать потоку транспорта.
[0067] Блок 22 управления транспортным средством приводит в движение по меньшей мере один из привода рулевого управления, привода педали ускорения и привода педали тормоза в соответствии с его положением, рассчитанным блоком 5 вычисления местоположения на карте, так что рассматриваемое транспортное средство 51 движется, следуя по маршруту, сформированному блоком 21 формирования маршрута рассматриваемого транспортного средства. Блок 22 управления транспортным средством также приводит в действие дисплей или динамик в транспортном средстве, чтобы сделать отображение, или уведомление, или предупреждение пассажиру. Хотя этот вариант осуществления иллюстрируется случаем, в котором помощь при движении рассматриваемому транспортному средству 51 оказывается в соответствии со сформированным маршрутом, помощь при движении рассматриваемому транспортному средству 51 может оказываться независимо от формирования маршрута рассматриваемого транспортного средства 51. В таком случае помощь при движении может быть оказана в соответствии с относительным расстоянием до другого транспортного средства 52 или разницей в угле ориентации между другим транспортным средством 52 и рассматриваемым транспортным средством 51.
[0068] Ниже описан способ помощи при движении с использованием устройства помощи при движении, показанного на фиг. 1, со ссылкой на фиг. 2 и фиг. 3. Может быть использован показанный на фиг. 1 микрокомпьютер 100, служащий в качестве устройства обнаружения действия для обнаружения действия другого транспортного средства 52 с тем, чтобы реализовывать способ обнаружения действия с выдачей в итоге результата операции обработки, показанной на этапе S06 на фиг. 2.
[0069] Сначала, на этапе S01, устройство 1 обнаружения объектов обнаруживает поведение объектов вокруг рассматриваемого транспортного средства 51 с помощью соответствующих датчиков обнаружения объекта. Процесс переходит к этапу S02, и блок 2a интеграции обнаружения объединяет множество результатов обнаружения, полученных множественными датчиками обнаружения объекта, и выводит единый результат обнаружения на объект. Блок 2b отслеживания объекта отслеживает каждый обнаруженный и интегрированный объект.
[0070] Процесс переходит к этапу S03, и устройство 3 оценки положения рассматриваемого транспортного средства измеряет положение, угловую ориентацию и скорость рассматриваемого транспортного средства 51 на основе заданной контрольной точки с использованием датчика определения положения. Процесс переходит к этапу S04, и устройство 4 получения карты получает картографическую информацию, указывающую структуру дороги, по которой движется рассматриваемое транспортное средство 51.
[0071] Процесс переходит к этапу S05, и блок 5 вычисления местоположения на карте оценивает положение и угловую ориентацию рассматриваемого транспортного средства 51 на карте в соответствии с положением рассматриваемого транспортного средства 51, измеренным на этапе S03, и данными карты, полученными на этапе S04. Процесс переходит к этапу S06, и блок 10 прогнозирования действия прогнозирует действие другого транспортного средства 52 вокруг рассматриваемого транспортного средства 51 в соответствии с результатом обнаружения (поведением другого транспортного средства 52), полученным на этапе S02, и положением рассматриваемого транспортного средства 51, указанным на этапе S05.
[0072] Ниже более подробно описан процесс на этапе S06 со ссылкой на фиг. 3. На этапе S611 блок 11 определения поведения определяет дорогу, по которой движется другое транспортное средство 52, и его полосу движения на дороге в соответствии с положением рассматриваемого транспортного средства 51 на карте и поведением объекта, полученным на этапе S02. Процесс переходит к этапу S612, и блок 12 прогнозирования вероятности действия прогнозирует вероятность действия другого транспортного средства 52 на основе карты. Например, блок 12 прогнозирования вероятности действия прогнозирует намерение действия в соответствии со структурой дороги.
[0073] Процесс переходит к этапу S613, и микрокомпьютер 100 выполняет процесс на этапах S611 и S612 для всех других транспортных средств 52, обнаруженных на этапе S01. После того как этот процесс выполнен (ДА на этапе S613), процесс переходит к этапу S614, и первый блок 13 коррекции вероятности действия учитывает неподвижный объект, одновременно обнаруженный на этапе S01, для коррекции вероятности действия, спрогнозированного на этапе S612. Например, как показано на фиг. 4, первый блок 13 коррекции вероятности действия добавляет намерение действия и первичный курс, которые другое транспортное средство 52 предприняло бы для временного изменения курса вправо, чтобы избежать припаркованного транспортного средства 53 и сохранить направление движения.
[0074] Процесс переходит к этапу S615, и когда на этапе S01 обнаруживается иной движущийся объект одновременно с другим транспортным средством 52, первый блок 13 коррекции вероятности действия учитывает этот иной движущийся объект, чтобы скорректировать вероятность действия, спрогнозированную на этапе S612.
[0075] Процесс переходит к этапу S616, и блок 18 определения пересечения определяет, пересекаются ли область движения рассматриваемого транспортного средства 51 и область движения другого транспортного средства 52. Процесс переходит к этапу S618, когда соответствующие области движения пересекаются друг с другом (ДА на этапе S617), и процесс переходит к этапу S620, когда соответствующие области движения не пересекаются друг с другом (НЕТ на этапе S617).
[0076] На этапе S618 блок 18 определения пересечения вычисляет разницу времени достижения ΔT между рассматриваемым транспортным средством 51 и другим транспортным средством 52, движущимися к зоне пересечения 56. Блок 19 определения автономного вождения получает характеристики вождения другого транспортного средства 52, чтобы определить, находится ли другое транспортное средство 52 в режиме автономного вождения, в соответствии с полученными характеристиками вождения. Второй блок 15 коррекции вероятности действия оценивает коэффициент правдоподобия соответствующих вероятностей действия другого транспортного средства 52 в соответствии с результатом определения того, находится ли другое транспортное средство 52 в режиме автономного вождения, и разницы времени достижения ΔT. В частности, второй блок 15 коррекции вероятности действия назначает результат определения того, находится ли другое транспортное средство 52 в режиме автономного вождения, и разности времени достижения ΔT данным, показанных на четырех графиках на фиг. 7B, чтобы оценить коэффициент правдоподобия соответствующих вероятностей действий в дорожной ситуации, в которой установлено соединение между рассматриваемым транспортным средством 51 и другим транспортным средством 52. Затем процесс переходит к этапу S620.
[0077] На этапе S620 микрокомпьютер 100 выполняет процесс от этапов S614 до S618 для всех других транспортных средств, обнаруженных на этапе S01. После того как этот процесс выполнен (ДА на этапе S620), процесс переходит к этапу S621, и блок 16 прогнозирования курса вычисляет эффективный курс (71 и 72, см. фиг. 8A и фиг. 8B) другого транспортного средства 52, когда другое транспортное средство 52 сохраняет свое поведение и, как предполагается, предпринимает действие, основанное на прогнозируемом намерении действия, с помощью традиционного метода оценки состояния, такого как фильтрация Калмана.
[0078] Процесс переходит к этапу S622, и блок 17 оценки коэффициента правдоподобия сравнивает первичный курс с эффективным курсом для каждой из вероятностей действия, спрогнозированных на этапах S612, S614 и S615. Затем блок 17 оценки коэффициента правдоподобия вычисляет коэффициент правдоподобия соответствующих вероятностей действия на основе разницы между первичным курсом и эффективным курсом. Блок 17 оценки коэффициента правдоподобия дополнительно взвешивает коэффициент правдоподобия соответствующих вероятностей действия в соответствии с коэффициентом правдоподобия, оцененным на этапе S618. Блок 17 оценки коэффициента правдоподобия определяет, что вероятность действия, которое оценивается как имеющее самое высокий коэффициент правдоподобия, является действием, которое выполняет другое транспортное средство 52.
[0079] Процесс переходит к этапу S623, и микрокомпьютер 100 выполняет процесс на этапах S621 и S622 для всех других транспортных средств, обнаруженных на этапе S01. На этом конкретный процесс на этапе S06, показанный на фиг. 2, заканчивается.
[0080] Процесс переходит к этапу S07, показанному на фиг. 2, и блок 21 формирования маршрута рассматриваемого транспортного средства формирует маршрут рассматриваемого транспортного средства 51 на основе спрогнозированных на этапе S06 действий других транспортных средств. Процесс переходит к этапу S08, и блок 22 управления транспортным средством оказывает помощь при движении рассматриваемому транспортному средству 51 с тем, чтобы привести рассматриваемое транспортное средство 51 в движение, следуя по маршруту, сформированному на этапе S07.
[0081] Настоящий вариант осуществления эффективен не только в дорожной ситуации, показанной на фиг. 4, но и в других дорожных ситуациях. Каждая из фиг. 5 и фиг. 6 иллюстрирует пример других дорожных ситуаций, в которых рассматриваемое транспортное средство 51 имеет более высокий приоритет на дороге перед другим транспортным средством 52, но другое транспортное средство 52 будет двигаться вперед раньше рассматриваемого транспортного средства 51 с учетом времени.
[0082] Фиг. 5 иллюстрирует дорожную ситуацию, в которой рассматриваемое транспортное средство 51 движется по правой полосе на дороге с двухполосным односторонним движением, а другое транспортное средство 52 движется по левой полосе наискосок впереди рассматриваемого транспортного средства 51. В левой полосе движения впереди другого транспортного средства 52 имеется припаркованное транспортное средство 53. Другое транспортное средство 52 временно меняет курс вправо, чтобы избежать припаркованного транспортного средства 53 и сохранить направление движения, как и в случае дорожной ситуации, показанной на фиг. 4. Поскольку область движения рассматриваемого транспортного средства 51 и область движения другого транспортного средства 52 пересекаются друг с другом в зоне пересечения 56, рассматриваемое транспортное средство 51 и другое транспортное средство 52 не могут одновременно войти в зону пересечения 56, и либо рассматриваемому транспортному средству 51, либо другому транспортному средству 52 необходимо изменить время въезда в зону пересечения 56. Рассматриваемое транспортное средство 51 имеет более высокий приоритет на дороге по сравнению с другим транспортным средством 52, и время достижения Ta рассматриваемого транспортного средства 51 превышает время достижения Tb другого транспортного средства 52.
[0083] Фиг. 6 иллюстрирует дорожную ситуацию, в которой рассматриваемое транспортное средство 51 на своей полосе движения и другое транспортное средство 52 на встречной полосе оба движутся к одному и тому же перекрестку. Рассматриваемое транспортное средство 51 должно проехать через перекресток прямо, в то время как другое транспортное средство 52 поворачивает на перекрестке направо. Таким образом, рассматриваемое транспортное средство 51 и другое транспортное средство 52 пересекаются друг с другом в зоне пересечения 56 на перекрестке. Рассматриваемое транспортное средство 51 имеет на дороге более высокий приоритет перед другим транспортным средством 52, и время достижения Ta рассматриваемого транспортного средства больше, чем время достижения Tb другого транспортного средства 52.
[0084] В соответствующих дорожных ситуациях, показанных на фиг. 5 и фиг. 6, между рассматриваемым транспортным средством 51 и другим транспортным средством 52 возникает соединение относительно того, какое из рассматриваемого транспортного средства 51 и другого транспортного средства 52 должно войти в зону пересечения 56 первым.
[0085] Согласно этому варианту осуществления обращаются к данным, показанным на соответствующих графиках на фиг. 7B, основываясь на результате определения того, находится ли другое транспортное средство 52 в режиме автономного вождения, и разнице времени достижения ΔT, чтобы точно определить вероятность въезда другого транспортного средства 52. Это точное определение может гарантировать безопасное движение как рассматриваемого транспортного средства 51, так и другого транспортного средства 52, а также предотвратить застой.
[0086] Как описано выше, вариант осуществления позволяет достичь следующих эффектов.
[0087] Микрокомпьютер 100 (пример контроллера) получает характеристики вождения другого транспортного средства 52, чтобы определить нахождение другого транспортного средства 52 в режиме автономного вождения в соответствии с характеристиками вождения, и оказывает помощь при движении рассматриваемому транспортному средству 51 на основании результата определения того, находится ли другое транспортное средство 52 в режиме автономного вождения. Действие другого транспортного средства 52 будет меняться в зависимости от того, находится ли другое транспортное средство 52 в режиме автономного вождения. Таким образом микрокомпьютер 100 выясняет, находится ли другое транспортное средство 52 в режиме автономного вождения, с тем чтобы оказать помощь при движении рассматриваемому транспортному средству 51 в соответствии с результатом определения нахождения в режиме автономного вождения. Выяснение режима автономного вождения позволяет точно оценить действие другого транспортного средства 52, чтобы позволить рассматриваемому транспортному средству 51 безопасно перемещаться с меньшим временем ожидания. Также может быть уменьшена возможность возникновения застоя.
[0088] Микрокомпьютер 100 обнаруживает действие другого транспортного средства 52 в соответствии с результатом определения того, находится ли другое транспортное средство 52 в режиме автономного вождения, и разницы времени достижения ΔT. Когда соответствующие области движения рассматриваемого транспортного средства 51 и другого транспортного средства 52 пересекаются друг с другом в зоне пересечения 56, рассматриваемое транспортное средство 51 и другое транспортное средство 52 не могут одновременно войти в зону пересечения 56, и либо рассматриваемое транспортное средство 51, либо другое транспортное средство 52 должно уступить дорогу другому, чтобы оно проехало первым. В этой дорожной ситуации разброс в определении действия другого транспортного средства 52 в режиме автономного вождения в зависимости от разницы времени достижения ΔT меньше, чем в случае, когда другое транспортное средство 52 не находится в режиме автономного вождения. Таким образом микрокомпьютер 100 может точно обнаружить действие другого транспортного средства 52 в соответствии с результатом определения того, находится ли другое транспортное средство 52 в режиме автономного вождения, и разницы времени достижения ΔT.
[0089] Микрокомпьютер 100 обнаруживает вероятность того, что другое транспортное средство 52 войдет в зону пересечения 56 раньше рассматриваемого транспортного средства 51, в соответствии с результатом определения того, находится ли другое транспортное средство 52 в режиме автономного вождения, и разницей времени достижения ΔT, и оказывает помощь при движении рассматриваемому транспортному средству 51 в соответствии с обнаруженной вероятностью. Разброс в определении действия другого транспортного средства 52 в режиме автономного вождения в зависимости от разницы времени достижения ΔT меньше, чем в случае, когда другое транспортное средство 52 не находится в режиме автономного вождения. Таким образом, микрокомпьютер 100 может точно определить вероятность того, что другое транспортное средство 52 войдет в зону пересечения 56 ранее рассматриваемого транспортного средства 51.
[0090] Этот вариант осуществления иллюстрирует случай, в котором другое транспортное средство 52 имеет более низкий приоритет на дороге по сравнению с рассматриваемым транспортным средством 51, и время достижения Tb другого транспортного средства 52 меньше, чем время достижения Ta рассматриваемого транспортного средства 51. Микрокомпьютер 100 может точно обнаруживать действие другого транспортного средства 52 в дорожной ситуации, в которой рассматриваемое транспортное средство 51 должно дать другому транспортному средству 52 проехать первым с учетом времени, даже если рассматриваемое транспортное средство 51 имеет более высокий приоритет на дороге перед другим транспортным средством 52.
[0091] Микрокомпьютер 100 оказывает помощь при движении рассматриваемому транспортному средству 51 так, что тот момент времени, в который рассматриваемое транспортное средство 51 проходит через зону пересечения 56, является более ранним в случае, когда другое транспортное средство 52 находится в режиме автономного вождения, чем в случае, когда другое транспортное средство 52 не находится в режиме автономного вождения. Микрокомпьютер 100 может точно обнаруживать действие другого транспортного средства 52 в соответствии с результатом определения того, находится ли другое транспортное средство 52 в режиме автономного вождения, и разницы времени достижения ΔT, чтобы уменьшить возможность застоя.
[0092] Хотя настоящее изобретение было описано выше со ссылкой на варианты осуществления, следует понимать, что настоящее изобретение не предназначено для ограничения вышеприведенными описаниями, и специалистам в данной области техники будут очевидны различные альтернативы и модификации.
[0093] Хотя вышеприведенный вариант осуществления был проиллюстрирован в случае, когда рассматриваемое транспортное средство 51 находится в режиме автономного вождения, позволяющем осуществлять автономное вождение, рассматриваемое транспортное средство 51 может находиться в режиме ручного вождения под управлением водителем рассматриваемого транспортного средства 51. В таком случае микрокомпьютер 100 может управлять при работе рассматриваемого транспортного средства 51 (для поддержки вождения) его динамиком, дисплеем и пользовательским интерфейсом для направления водителя при управлении рулевым колесом, акселератором и тормозом с помощью голоса или изображений.
[0094] Вышеупомянутый вариант осуществления был проиллюстрирован случаем со ссылкой на фиг. 6, на которой рассматриваемое транспортное средство 51 движется по правой полосе, в то время как другое транспортное средство 52 движется по левой полосе, но также может применяться к дорожной ситуации, в которой рассматриваемое транспортное средство 51 движется по левой полосе, в то время как другое транспортное средство 52 движется по правой полосе, а рассматриваемое транспортное средство 51 поворачивает направо. Например, когда разница времени достижения ΔT составляет 4 секунды (когда прохождение другого транспортного средства 52 состоится на 4 секунды позже, чем прохождение рассматриваемого транспортного средства 51), способ помощи при движении рассматриваемому транспортному средству 51 может различаться в зависимости от того, находится ли другое транспортное средство 52 в режиме автономного вождения. В частности, когда другое транспортное средство 52 находится в режиме ручного вождения, пассажир другого транспортного средства 52 может уступить дорогу рассматриваемому транспортному средству 51 даже несмотря на то, что другое транспортное средство 52 имеет более высокий приоритет на дороге, на которой другое транспортное средство 52 обычно проходит перекресток первым. Напротив, другое транспортное средство 52 в режиме автономного вождения движется в соответствии с заданным пороговым значением разницы времени достижения ΔT, и возможность того, что другое транспортное средство 52 пройдет через перекресток раньше рассматриваемого транспортного средства 51, высока, когда разница времени достижения ΔT меньше этого порогового значения. Таким образом, способ движения может меняться в зависимости от того, находится ли другое транспортное средство 52 в режиме автономного вождения, в дорожной ситуации, при которой рассматриваемое транспортное средство 51 движется по левой полосе, в то время как другое транспортное средство 52 движется по правой полосе, и рассматриваемое транспортное средство 51 поворачивает направо. В соответствии с этим вариантом осуществления действие другого транспортного средства 52 обнаруживается в соответствии с определением того, находится ли другое транспортное средство 52 в режиме автономного вождения, чтобы оказать помощь при движении рассматриваемому транспортному средству 51 на основании результата обнаружения. Помощь при движении в этой ситуации позволяет рассматриваемому транспортному средству 51 двигаться плавно, снимая состояние торможения, чтобы подготовиться к запуску, когда другое транспортное средство 52 находится в режиме ручного вождения, или останавливаясь, когда другое транспортное средство 52 находится в режиме автономного вождения, например.
[0095] Помощь при движении в соответствии с вариантом осуществления не ограничена случаем регулирования курса рассматриваемого транспортного средства 51, но может также применяться к случаю выполнения управления автономным вождением или управления помощью при движении (включая автономное торможение) на основании результатов прогнозирования, включая операции ускорения и замедления, предварительного замедления, управления положением в полосе движения, перемещения к краю дороги, и учитывая, например, порядок прохождения полос движения. Вышеуказанное управление позволяет рассматриваемому транспортному средству 51 двигаться плавно с тем, чтобы не дать пассажиру почувствовать дискомфорт.
[0096] СПИСОК УСЛОВНЫХ ОБОЗНАЧЕНИЙ
51 - рассматриваемое ТРАНСПОРТНОЕ СРЕДСТВО
52 - ДРУГОЕ ТРАНСПОРТНОЕ СРЕДСТВО
53 - Припаркованное ТРАНСПОРТНОЕ СРЕДСТВО
56 - ЗОНА ПЕРЕСЕЧЕНИЯ
100 - МИКРОКОМПЬЮТЕР (КОНТРОЛЛЕР)
Ta - ВРЕМЯ Достижения рассматриваемого ТРАНСПОРТНОГО СРЕДСТВА
Tb - ВРЕМЯ Достижения ДРУГОГО ТРАНСПОРТНОГО СРЕДСТВА
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Устройство обнаружения уступов и способ обнаружения уступов
Способ обнаружения объектов и устройство обнаружения объектов
Способ оценки собственной позиции и устройство оценки собственной позиции
Способ помощи при движении и устройство помощи при движении
Способ прогнозирования действия и устройство прогнозирования действия устройства помощи при движении
Способ помощи при вождении и устройство помощи при вождении

