Результат интеллектуальной деятельности: УСТРОЙСТВО И СПОСОБ АНАЛИЗА ШИН
Вид РИД
Изобретение
Настоящее изобретение относится к устройству для анализа шин на линии по производству шин, в частности, посредством получения изображений поверхности шины и их дальнейшей обработки, например, для проверки возможного наличия обнаруживаемых дефектов на поверхности шины.
«Шина», как правило, означает готовую шину, то есть шину после этапов сборки, формования в пресс-форме и вулканизации, но, возможно также невулканизированную шину после этапа сборки и перед этапами формования в пресс-форме и/или вулканизации.
Как правило, шина имеет по существу тороидальную конструкцию относительно оси вращения шины во время эксплуатации и имеет осевую среднюю плоскость, ортогональную к оси вращения, при этом указанная плоскость, как правило, представляет собой (по существу) геометрическую плоскость симметрии (например, если игнорировать любые незначительные асимметрии, такие как в рисунке протектора и/или внутренней структуре).
Наружная или внутренняя поверхность шины означает соответственно поверхность, которая остается видимой после соединения шины с соответствующим ей, монтажным ободом, и поверхность, которая больше не является видимой после указанного соединения.
Термины «нижний», «верхний», «ниже/под» и «выше/над» указывают относительное положение элемента, такого как компонент шины, шина, устройство, приспособление и т.д., относительно грунта во время использования или положение одного из указанных элементов относительно другого элемента.
Под «по существу ортогональными» по отношению к геометрическим элементам (таким как прямые линии, плоскости, поверхности и т.д.) понимается то, что данные элементы образуют угол, составляющий 90°±15°, предпочтительно 90°±10°.
Под «по существу параллельными» по отношению к указанным геометрическим элементам понимается то, что данные элементы образуют угол, составляющий 0°±15°, предпочтительно 0°±10°.
Термины «оптическое», «световое» и тому подобные относятся к используемому электромагнитному излучению, которое имеет, по меньшей мере, часть спектра, находящуюся в расширенной окрестности оптического диапазона и необязательно находящуюся строго в пределах оптического диапазона (то есть 400-700 нм), например, данная расширенная окрестность оптического диапазона может охватывать от ультрафиолетовой до инфракрасной области спектра (например, длину волны от приблизительно 100 нм до приблизительно 1 мкм).
Под «цифровым изображением» или - в качестве эквивалента - «изображением», как правило, понимается набор данных, как правило, содержащихся в компьютерном файле, в котором каждый кортеж координат (как правило, каждая пара координат) из конечной совокупности (как правило, двумерной и матричной, то есть N строк × М столбцов) кортежей пространственных координат (при этом каждый кортеж соответствует пикселю) связан с соответствующим набором числовых значений (которые могут характеризовать различные величины). Например, в монохромных изображениях (таких как изображения в уровнях серого или в оттенках серого) такой набор значений состоит из одного значения на конечной шкале (как правило, 256 уровней или тонов), при этом данное значение характеризует, например, уровень светлоты (или интенсивности) соответствующего кортежа пространственных координат при отображении. Дополнительным примером являются цветные изображения, в которых набор значений характеризует уровень светлоты множества цветов или каналов, как правило, основных цветов (например, красного, зеленого и синего в кодировке RGB и голубого, пурпурного, желтого и черного в кодировке CMYK). Термин «изображение» необязательно означает его реальное отображение.
Любая ссылка на конкретное «цифровое изображение» (например, цифровое изображение, первоначально полученное на шине) охватывает в более общем смысле любое цифровое изображение, получаемое посредством одного или более процессов цифровой обработки указанного конкретного цифрового изображения (например, таких как фильтрация, усреднение, сглаживание, бинаризация, сравнение с порогом, морфологические преобразования (открытие и т.д.), вычисления производных или интегралов и т.д.).
Термин «двумерное изображение» или «2D» означает цифровое изображение, каждому пикселю которого соответствуют данные, характеризующие отражательную/рассеивающую способность и/или цвет поверхности, такое как изображения, регистрируемые обычными камерами или цифровыми камерами (например, ПЗС-камерами).
Термин «трехмерное изображение» или «3D» означает цифровое изображение, каждому пикселю которого соответствуют данные о высоте поверхности, например, изображения, получаемые способом воссоздания альтиметрического профиля поверхности посредством триангуляционной обработки двумерного матричного изображения поверхности, которая освещена линией излучения лазера.
«Цифровая камера» или кратко «камера» означает оптоэлектронное устройство, выполненное с возможностью получения двумерного цифрового изображения и включающее в себя датчик цифровых изображений (или кратко «датчик»), который определяет плоскость изображения, и объектив (который, как предполагается, для простоты предусмотрен с цилиндрической симметрией, хотя изобретение не ограничено только данными объективами).
«Датчик» означает набор фоточувствительных элементов (называемых «пикселями»), способных преобразовывать падающий свет в электрический сигнал, например, посредством технологии ПЗС или КМОП. Термин «пиксель» используется для обозначения как одного фоточувствительного элемента датчика, так и одного элемента, формирующего цифровое изображение, определенное выше, при этом каждый пиксель датчика, как правило, соответствует пикселю изображения.
«Матричная камера» означает камеру, датчик которой имеет пиксели, расположенные в соответствии с прямоугольной матрицей, имеющей два размера сопоставимой величины (например, два размера различаются менее чем на один порядок величины, как в форматах 4×3 или 3×2). Как правило, диагональ матрицы чувствительных элементов имеет длину, составляющую несколько десятков миллиметров.
«Линейная камера» означает камеру, датчик которой (называемый «линейным датчиком») имеет пиксели, расположенные в виде прямоугольной матрицы, имеющей один размер, значительно превышающий другой, как правило, превышающий на, по меньшей мере, два порядка величины. Как правило, число строк пикселей датчика составляет от 1 до 4, и число столбцов превышает 1000. Термины «строки» и «столбцы» используются традиционно и являются взаимозаменяемыми. Линейная камера отличается линией объектива, лежащей на пересечении между фокальной плоскостью камеры и плоскостью (называемой «оптической плоскостью»), ортогональной к ней и проходящей через линейный датчик, и выполнена с возможностью получения изображений линейных участков поверхности, расположенных на линии объектива (называемых «линейными изображениями» и имеющих размеры в пикселях, равные размерам линейного датчика). «Линейный участок поверхности» означает участок поверхности, имеющий один размер, значительно больший, чем другой размер, определяемый в направлении, перпендикулярном к направлению данного одного размера, как правило, превышающий другой размер, по меньшей мере, на два порядка величины. Меньший размер линейного участка поверхности, как правило, меньше или равен 0,1 мм.
«Оптическая ось» объектива означает линию, вдоль которой существует вращательная симметрия объектива.
«Фокальная плоскость» камеры означает плоскость точек объекта, которые фокусируются посредством объектива на датчик, то есть лучи, выходящие из каждой точки объекта в фокальной плоскости сходятся в соответствующей точке на плоскости датчика (плоскости изображения).
«Глубина резкости» означает совокупность плоскостей в окрестности фокальной плоскости, каждая точка которых, будучи спроецированной посредством объектива на плоскость датчика, формирует изображение, вписанное в заданный кружок рассеяния (например, имеющий диаметр 5-10 микрон).
«Лазерный источник, имеющий линейный пучок» или кратко «линейный лазерный источник» означает лазерный источник, выполненный с возможностью излучения пучка, имеющего поперечное сечение в виде линии, как правило, имеющего форму отрезка прямой.
«Плоскость распространения» линейного лазерного источника означает плоскость, на которой распространяется линейный пучок (при этом указанная линия лежит в плоскости распространения).
«Направленное световое излучение», падающее в точке поверхности, означает световое излучение, для которого имеется телесный угол при вершине конуса, имеющий данную точку в качестве вершины и величину, которая меньше или равна π/8 стерадиан (предпочтительно меньше или равна π/10 стерадиан), в пределах которого находится, по меньшей мере, 75% от всей силы света, предпочтительно, по меньшей мере, 90%, более предпочтительно вся сила света, падающего в данной точке.
«Рассеянное световое излучение» относится к ненаправленному световому излучению.
«Световое излучение, падающее под скользящим углом», падающее в точке поверхности, означает световое излучение, при котором световой луч, соответствующий, по меньшей мере, 75% (предпочтительно, по меньшей мере, 90%, более предпочтительно, 100%) от всей силы света светового излучения, падающего в данной точке, образует с плоскостью, касательной к поверхности в указанной точке, угол падения, который меньше или равен 60°, предпочтительно меньше или равен 45°.
«Длительность цикла сборки/изготовления» означает время, проходящее между выходом собранной/готовой шины из сборочной/производственной установки и выходом следующей шины.
В области процессов производства и сборки шин для колес транспортных средств особенно целесообразно выполнение контроля качества изготовленных изделий с целью предотвращения попадания дефектных шин или шин, не отвечающих техническим требованиям, на рынок и/или для последовательного регулирования используемых устройств и оборудования для улучшения и оптимизации выполнения операций, выполняемых в производственном процессе.
Данные операции контроля качества включают, например, те, которые выполняются операторами, которые тратят фиксированное время на визуальную и тактильную проверку шины; если с учетом его собственного опыта и чувствительности оператор заподозрит, что шина не соответствует определенным стандартам качества, та же шина будет подвергнута дополнительным проверкам посредством более детального осмотра человеком и/или посредством соответствующего оборудования для более глубокой оценки любых недостатков с точки зрения конструкции и/или качества.
В US 2010/0002244 А1 описаны технические средства контроля поверхности шины, позволяющие надежно устанавливать различия между кусками резины разного качества, включенными в поверхность шины. Первое осветительное устройство включает в себя два первых светоизлучателя, которые излучают свет по направлению к линии объектива соответственно с противоположных сторон. Второе осветительное устройство включает в себя два вторых светоизлучателя, которые излучают свет по направлению к линии объектива в направлении, противоположном первой освещаемой линии, и соответственно с противоположных сторон. Первое и второе осветительные устройства осуществляют освещение попеременно. Линейная камера формирует изображение участка поверхности шины, соответствующего линии объектива, синхронно с соответствующими операциями освещения, выполняемыми первым и вторым осветительными устройствами.
В US 2004/0212795 А1 описан способ измерения профиля и/или деформации объекта. Объект освещается светом, излучаемым источником излучения и состоящим, в частности, из когерентного или частично когерентного излучения, в особенности лазерного излучения. Световое излучение, отражаемое объектом, воспринимается камерой с датчиком изображений. Для повышения качества изображения первое изображение создается посредством первой конфигурации камеры и/или источника излучения, которая подходит для первой зоны изображения. Кроме того, второе изображение создается посредством второй конфигурации камеры и/или источника излучения, которая подходит для второй зоны изображения. Два изображения комбинируются.
В US 6680471 В2 описано устройство, выполненное с возможностью равномерного освещения внутренней криволинейной поверхности шины посредством светодиодов и ПЗС-матрицы.
В US 2012/0134656 А1 описано осветительное устройство и устройство контроля шины, которое может легко обнаружить отклонения формы в изготовленной шине.
В WO 2015/044196 А1 описано устройство получения изображений внутренней поверхности шины, содержащее осветительные средства, средства получения изображений и отражатель, оптически расположенный между осветительными средствами и освещаемой зоной поверхности шины.
В области контроля качества шин Заявитель поставил перед собой задачу анализа внутренней и/или наружной поверхности шины посредством оптического получения их цифровых изображений и их последующей обработки, например, для обнаружения возможного наличия дефектов на или вблизи поверхности. Отыскиваемые дефекты могут представлять собой, например, неровности на поверхности шины (невулканизированную смесь, изменения формы и т.д.), неоднородность структуры, разрезы, наличие посторонних предметов на поверхности и т.д.
Заявитель отметил, что для использования контроля в едином масштабе времени в установке для производства шин сами операции контроля должны выполняться за уменьшенное время, которое меньше времени цикла или соответствует ему, и с уменьшенными затратами и/или габаритными размерами.
В этой связи Заявитель осознал, что предпочтительно получать и анализировать изображения разных типов для одной и той же зоны поверхности шины, например, при разном разрешении, с разным освещением и т.д. В частности, Заявитель считает очень предпочтительным получение как двумерных изображений, так и трехмерных изображений одной и той же зоны поверхности.
Например, 3D-технология (в особенности с высоким разрешением, например, с разрешением, которое меньше или равно 10 микрон) может быть использована для обнаружения недостатка или выступания материала на поверхности шин, как правило, отсутствия материала или пузырьков, в то время как 2D-технология (в особенности с высоким разрешением) может быть использована для обнаружения дефектов, не видимых на трехмерных изображениях, таких как узкие разрезы и пятна. Кроме того, некоторые элементы, подобные тиснениям и насечкам, могут быть обнаружены посредством обеих технологий.
Заявитель осознал, что методы контроля качества шин посредством оптического получения изображений такого типа, как описанные в вышеуказанных документах, требуют значительных ресурсов с точки зрения затрат времени и/или используемого пространства, что по существу приводит к их выполнению вне производственной линии или в случае выполнения их на линии вызывает удлинение времени цикла и/или увеличение (прямых и/или косвенных) производственных затрат.
Заявитель осознал, что при получении цифровых изображений поверхности шины для их анализа на производственной линии, когда полученные цифровые изображения представляют собой изображения двух типов, например, двумерные изображения (2D) и трехмерные изображения (3D), полученные при использовании метода лазерной триангуляции, время на сканирование одной и той же зоны поверхности дважды, например, соответственно для двумерного и трехмерного изображений, означало бы значительно увеличение общего времени анализа шины.
В завершение, Заявитель обнаружил, что предпочтительно объединить в устройстве, имеющем одну опорную раму, две разные системы получения изображений, при которых зона, захватываемая камерой из второй системы, размещается в достаточной степени в фокусе (то есть находится в пределах ее глубины резкости), по меньшей мере, в плоскости (называемой «плоскостью поступательного перемещения»), через которую также проходит фокальная плоскость камеры из первой системы и которая по существу ортогональна к оптической оси камеры из первой системы. Таким образом, при перемещении поверхности шины в такой плоскости поступательного перемещения или вблизи нее (то есть в пределах глубины резкости камеры из первой системы, как разъяснено ниже) относительно устройства можно одновременно получить два разных изображения одной и той же зоны поверхности шины, которая является локально по существу плоской и находится в непосредственной близости от такой плоскости поступательного перемещения, при сохранении устройства чрезвычайно компактным.
Согласно его первому аспекту изобретение относится к устройству для анализа шин, содержащему опорную раму и фланец для крепления указанной опорной рамы к элементу для обеспечения перемещения устройства.
Первая система получения изображений предпочтительно предусмотрена для получения изображений поверхности шины, при этом указанная первая система получения изображений смонтирована на указанной опорной раме.
Первая система получения изображений предпочтительно содержит первую камеру, имеющую первую оптическую ось, первую фокальную плоскость и первую глубину резкости.
Первая система получения изображений предпочтительно содержит первую осветительную систему, выполненную с возможностью освещения окрестности первой фокальной точки, которая находится в точке пересечения между указанной первой оптической осью и указанной первой фокальной плоскостью.
Вторая система получения изображений предпочтительно предусмотрена для получения изображений указанной поверхности, при этом указанная вторая система получения изображений смонтирована на указанной опорной раме.
Вторая система получения изображений предпочтительно содержит вторую камеру и вторую осветительную систему.
Указанная вторая камера предпочтительно имеет вторую оптическую ось, вторую фокальную плоскость и вторую глубину резкости.
Предпочтительно имеется, по меньшей мере, одна плоскость поступательного перемещения, проходящая через указанную первую фокальную точку, по существу ортогональная к указанной первой оптической оси.
Указанная плоскость поступательного перемещения предпочтительно также проходит через первую зону пересечения между указанной второй оптической осью и указанной второй глубиной резкости.
Согласно его второму аспекту изобретение относится к станции для анализа шин на линии по производству шин.
Станция предпочтительно содержит опору, выполненную с возможностью обеспечения опоры для шины, установленной на боковине, и с возможностью поворота шины вокруг ее оси вращения.
Станция предпочтительно содержит устройство согласно изобретению.
Предпочтительно предусмотрен элемент для обеспечения перемещения указанного устройства, на котором указанное устройство смонтировано посредством указанного фланца.
Согласно его третьему аспекту изобретение относится к способу анализа шин посредством устройства согласно изобретению.
Предпочтительно предусмотрено, что зону указанной поверхности шины поступательно перемещают относительно устройства, при этом она остается находящейся в или вблизи указанной, по меньшей мере, одной плоскости поступательного перемещения, по меньшей мере, в указанной первой фокальной точке.
Указанные первая система получения изображений и вторая система получения изображений предпочтительно приводятся в действие во время указанного поступательного перемещения для получения параллельно соответствующей последовательности изображений одной и той же последовательности различных участков указанной зоны поверхности.
Выражение «находящаяся вблизи плоскости поступательного перемещения в указанной первой фокальной точке» означает, что зона поверхности пересекает указанную первую оптическую ось в точке, которая находится в пределах первой глубины резкости.
Заявитель полагает, что посредством вышеприведенного решения можно выполнить параллельно получение изображений одной и той же зоны поверхности (как правило, в целом окружной периферийной зоны) посредством обеих технологий, в результате чего вдвое уменьшается требуемое время и, следовательно, использование самого устройства при ограничении необходимых габаритных размеров устройства и/или соответствующей станции анализа как во время эксплуатации, так и во время бездействия.
Действительно, Заявитель полагает, что комбинация двух различных систем получения изображений в одном устройстве, в котором, по меньшей мере, одна плоскость, по существу ортогональная к оптической оси первой системы и проходящая через фокальную точку на оптической оси первой системы, проходит также через зону (достаточного) фокуса оптической оси второй системы, обеспечивает возможность одновременного получения изображений двух разных типов для одной и той же зоны поверхности, при этом устройство в целом сохраняется компактным и/или имеющим уменьшенный вес (и, таким образом, легко управляемым в пространстве даже в ограниченных зонах и/или в зонах, занятых другими устройствами, и/или также с относительно высокими скоростями). Действительно, для получения двух изображений разного типа можно перемещать поверхность шины относительно устройства вдоль плоскости поступательного перемещения или вблизи нее так, что после получения изображения участка поверхности, например, посредством первой системы она перемещается при движении в направлении, по существу ортогональном к оптической оси первой системы, до тех пор, пока она не пройдет через фокальную зону второй системы для получения соответствующего изображения, или наоборот. В частности, в каждом случае две системы получают соответствующие изображения различных и соседних участков поверхности, принадлежащих одной и той же заданной зоне поверхности. При синхронизации относительного перемещения поверхности с получением двух разных изображений можно получить полное изображение всех заданной зоны поверхности в двух типах соответственно посредством комбинирования двух соответствующих последовательностей изображений, полученных для одной и той же последовательности участков поверхности.
Заявитель также полагает, что перемещение участка поверхности при движении в направлении, по существу ортогональном к первой оси, обеспечивает возможность оптимального размещения двух систем получения изображений для обеспечения компактности устройства, например, оно позволяет разместить их рядом друг с другом по существу параллельно друг другу (то есть при первой оптической оси, по существу параллельной второй оптической оси).
Настоящее изобретение в одном или более из его вышеприведенных аспектов может дополнительно иметь один или более из предпочтительных признаков, описанных в дальнейшем.
Указанная первая система получения изображений предпочтительно выполнена с возможностью получения двумерных изображений.
Указанная вторая система получения изображений предпочтительно выполнена с возможностью получения трехмерных изображений.
Указанная вторая камера предпочтительно представляет собой матричную камеру.
Указанная вторая осветительная система предпочтительно содержит лазерный источник, выполненный с возможностью излучения линейного пучка, имеющего плоскость распространения.
Указанная вторая оптическая ось предпочтительно имеет наклон относительно указанной плоскости распространения.
Таким образом, устройство предпочтительно выполнено с возможностью одновременного получения как двумерных изображений, так и трехмерных изображений (посредством лазерной триангуляции) одной и той же зоны поверхности.
Указанная плоскость поступательного перемещения предпочтительно также проходит через вторую зону пересечения между указанной плоскостью распространения и указанной второй глубиной резкости.
Заявитель отмечает, что комбинирование 2D- и 3D-технологий в принципе затруднено при разных оптических путях, разных камерах, разной оптике, разных фокальных апертурах, разных временах выдержки, разных элементарных источниках света и т.д. Однако Заявитель полагает, что при комбинировании в одном устройстве двух разных систем получения изображений, а именно одной 2D и одной 3D, в случае, когда линия излучения лазера 3D-системы в достаточной степени сфокусирована посредством соответствующей камеры (то есть находится в пределах ее глубины резкости), по меньшей мере, в указанной плоскости поступательного перемещения, можно одновременно получать как двумерные изображения, так и трехмерные изображения одной и той же зоны поверхности шины, которая является локально по существу плоской и находится вблизи указанной плоскости поступательного перемещения, при перемещении поверхности шины в такой плоскости поступательного перемещения или вблизи нее относительно устройства. Кроме того, указанное решение позволяет получить высокое качество зарегистрированных двумерных и трехмерных изображений.
Как правило, существует пучок из (бесконечного количества) плоскостей поступательного перемещения, проходящих через указанную первую фокальную точку и по существу ортогональных к указанной первой оптической оси, предпочтительно проходящих через указанную первую зону пересечения между указанной второй оптической осью и указанной второй глубиной резкости.
Как правило, существует пучок из (бесконечного количества) плоскостей поступательного перемещения, проходящих через указанную первую фокальную точку и по существу ортогональных к указанной первой оптической оси, предпочтительно проходящих через указанную вторую зону пересечения между указанной плоскостью распространения и указанной второй глубиной резкости.
Указанная, по меньшей мере, одна плоскость поступательного перемещения предпочтительно представляет собой плоскость, перпендикулярную к указанной первой оптической оси.
Указанная, по меньшей мере, одна плоскость поступательного перемещения предпочтительно совпадает с указанной первой фокальной плоскостью. Другими словами, фокальная плоскость ортогональна к первой оптической оси, как обычно имеет место, например, когда система не имеет устройств, которые обеспечивают поворот фокальной плоскости (см. в дальнейшем в отношении 3D-системы). Таким образом, первая система получения изображений как таковая и устройство в целом являются особенно простыми и компактными.
Указанная, по меньшей мере, одна плоскость поступательного перемещения предпочтительно проходит через вторую фокальную точку, которая находится в точке пересечения между указанной плоскостью распространения, указанной второй фокальной плоскостью и указанной второй оптической осью. Таким образом, вторая система получения трехмерных изображений обеспечивает размещение поверхности, перемещающейся вдоль плоскости поступательного перемещения, точно в фокусе.
Указанная первая камера предпочтительно является линейной и имеет линию объектива, лежащую на пересечении между указанной первой фокальной плоскостью и оптической плоскостью, проходящей через указанную первую оптическую ось, и линейный датчик указанной линейной камеры. Таким образом, можно получить изображения протяженных зон криволинейной поверхности шины (при предотвращении проблем фокусировки и/или неравномерности освещения) посредством последовательного получения и комбинирования последовательности линейных изображений, полученных путем постепенного смещения зоны поверхности на (или вблизи) линии объектива.
Указанная линия объектива и линия пересечения между указанной плоскостью поступательного перемещения и указанной плоскостью распространения предпочтительно параллельны друг другу и выровнены относительно направления поступательного перемещения, ортогонального к ним и принадлежащего плоскости поступательного перемещения. Это предпочтительно обеспечивает возможность получения двумерных и трехмерных цифровых изображений одной и той же зоны поверхности (например, окружной) посредством относительного поступательного перемещения данной зоны вдоль направления поступательного перемещения (и получения последовательности соответствующих двумерных и трехмерных изображений одной и той же последовательности линейных участков зоны поверхности) при сохранении устройства компактным, поскольку две системы получения изображений могут быть расположены рядом друг с другом вдоль направления поступательного перемещения.
Указанная вторая камера предпочтительно расположена со стороны, противоположной по отношению к указанной первой камере относительно лазерного источника. Таким образом, габаритные размеры устройства предпочтительно уменьшаются, и линии получения изображений в 2D- и 3D-системах могут быть расположены близко. Действительно, как правило, оптическая длина луча лазера (то есть расстояние между передней поверхностью лазера и линией пересечения между плоскостью распространения и плоскостью поступательного перемещения) превышает оптический путь второй камеры (то есть расстояние между передней поверхностью объектива и указанной линией пересечения). Если бы лазер находился снаружи, то есть при второй камере, расположенной между первой камерой и лазером, устройство в целом имело бы бóльшие размеры в боковом направлении.
Указанная плоскость распространения предпочтительно параллельна указанной оптической плоскости первой камеры. Это предусмотрено для уменьшения габаритных размеров устройства (особенно при синергетическом комбинировании с решением по предыдущему абзацу). Кроме того, в данной конфигурации, в которой вторая оптическая ось имеет наклон относительно нормали к плоскости поступательного перемещения, вторая фокальная плоскость имеет наклон относительно плоскости поступательного перемещения, то есть плоскости расположения поверхности шины. Данное расположение также имеет место без устройств, которые обеспечивают наклон второй фокальной плоскости относительно второй оптической оси (см. ниже). В этой ситуации вторая глубина резкости для фокусировки отклонения заданной высоты поверхности будет меньше, чем в конфигурации, в которой вторая фокальная плоскость расположена параллельно поверхности шины.
Вторая камера, как правило, содержит второй датчик, определяющий плоскость второго изображения, и второй объектив.
Устройство предпочтительно содержит непрозрачный разделитель, расположенный между указанной первой осветительной системой и указанной первой зоной пересечения. Более предпочтительно, если непрозрачный разделитель устройства расположен между указанной первой осветительной системой и указанной второй зоной пересечения.
Указанная первая осветительная система предпочтительно выполнена с возможностью излучения в первом оптическом диапазоне, и указанный второй лазерный источник выполнен с возможностью излучения во втором оптическом диапазоне, по существу отдельном от указанного первого оптического диапазона.
Вторая система получения изображений предпочтительно содержит оптический фильтр (например, интерференционный), оптически расположенный перед объективом второй камеры и выполненный с возможностью пропускания излучения в указанном втором оптическом диапазоне и с возможностью по существу блокирования излучения в указанном первом оптическом диапазоне. Например, второй лазерный источник может излучать при длине волны, соответствующей середине диапазона и составляющей 670 нм, которая достаточна «далека» от диапазона излучения, излучаемого светодиодом красного свечения, встроенным во вторую осветительную систему с белым светом, так что вторая система в меньшей степени подвергается возмущению со стороны светодиодного осветительного устройства, что делает интерференционный фильтр настолько эффективным, насколько это возможно, при сохранении ее в видимом диапазоне и, следовательно, остающейся в пределах класса 3R безопасности лазера.
Одно или оба из двух вышеприведенных решений обеспечивают предотвращение или ослабление интерференции света в двух зонах (на двух линиях), изображения которых получают, в частности, предотвращается преобладание излучения от светодиодов над излучением лазера в указанной зоне пересечения плоскости распространения с указанной второй глубиной резкости.
Устройство предпочтительно содержит вспомогательную опорную раму, на которой жестко смонтирована указанная первая осветительная система.
В одном варианте осуществления указанная вспомогательная опорная рама установлена на опорной раме с возможностью поступательного прямолинейного перемещения.
Прямолинейное поступательное перемещение предпочтительно происходит вдоль направления, по существу параллельного указанной первой оптической оси, из положения, проксимального по отношению к первой камере, в положение, дистальное по отношению к указанной первой камере. Данная конфигурация предпочтительно обеспечивает возможность перемещения и вставки устройства в относительно узкие пространства, такие как пространство, ограниченное бортами шины. Только после «обхода» наиболее выступающих частей (например, борта, расположенного вверху) осветительные элементы перемещаются в место, находящееся на очень малом расстоянии от внутренней поверхности, в котором осуществляется максимальное освещение зоны, представляющей интерес, и фокусировка.
В одном варианте осуществления предусмотрена вспомогательная опорная рама, на которой жестко смонтирована указанная первая осветительная система, при этом первая и вторая камеры и вторая осветительная система жестко смонтированы на указанной опорной раме вблизи первого конца устройства, и указанная вспомогательная опорная рама жестко прикреплена к указанной опорной раме вблизи второго конца устройства, противоположного в продольном направлении по отношению к первому концу, при этом расстояние вдоль первой оптической оси между наружной оптической поверхностью указанной первой камеры и указанной первой фокальной точкой больше или равно 250 мм. Более предпочтительно, если указанное расстояние больше или равно 300 мм. Таким образом, объектив первой камеры находится достаточно далеко от первой фокальной плоскости для обеспечения возможности использования объектива для первой камеры с довольно большим фокусным расстоянием, например, превышающим 35 мм, составляющим, например, 50 мм, который, как правило, имеет лучшее разрешение и/или апертуру или яркость (число f/N при фокусном отношении N) при той же высоте поля кадра.
Указанная первая осветительная система предпочтительно включает в себя первый источник света, второй источник света и третий источник света, выполненные с возможностью излучения соответственно первого светового излучения, второго светового излучения и третьего светового излучения для освещения указанной окрестности первой фокальной точки (например, указанной линии объектива).
Указанные первый источник света и второй источник света предпочтительно находятся соответственно с противоположных сторон по отношению к указанной оптической плоскости.
Более предпочтительно, если указанные первый источник света и второй источник света расположены зеркально по отношению к указанной оптической плоскости и указанный третий источник света расположен между указанными первым и вторым источниками (то есть является ближайшим к первой оптической оси первого источника света и второго источника света).
Каждый из указанных первого источника света и второго источника света предпочтительно выполнен с возможностью освещения указанной окрестности первой фокальной точки (например, указанной линии объектива) соответствующим светом, падающим под скользящим углом, и указанный третий источник света выполнен с возможностью освещения указанной окрестности первой фокальной точки (например, указанной линии объектива) рассеянным светом.
Каждый из указанных первого источника света, второго источника света и третьего источника света предпочтительно содержит один или более соответствующих подысточников, каждый из которых имеет соответствующее направление доминирующей протяженности, по существу параллельное указанной линии объектива.
Указанный третий источник света предпочтительно содержит множество соответствующих подысточников, распределенных с обеих сторон указанной оптической плоскости.
Более предпочтительно, если указанные подысточники распределены симметрично относительно указанной оптической плоскости.
Еще более предпочтительно, если число указанных подысточников составляет, по меньшей мере, четыре. Таким образом, обеспечивается равномерное освещение линии объектива рассеянным светом, и группа источников выполнена особо компактной.
Каждый из первого источника света и второго источника света предпочтительно содержит один подысточник. Таким образом, они обеспечивают соответствующее направленное излучение, предпочтительно падающее под скользящим углом.
Указанные соответствующие подысточники предпочтительно являются одинаковыми по конструкции и/или размерам. Таким образом, упрощаются конструкция, функционирование и техническое обслуживание группы источников.
Указанные соответствующие подысточники предпочтительно проходят прямолинейно вдоль направления доминирующей протяженности. Это позволяет уменьшить габаритные размеры при сохранении высокой эффективности освещения.
Подысточники первого источника света, второго источника света и третьего источника света предпочтительно расположены на линии, лежащей в плоскости, ортогональной к линии объектива, с вогнутой стороной, обращенной к линии объектива. В одном варианте осуществления указанные подысточники находятся на одинаковом расстоянии от указанной линии объектива (то есть они распределены по дуге окружности). Все подысточники, расположенные с одной стороны указанной оптической плоскости, предпочтительно распределены при одинаковом расстоянии между ними. Таким образом, облегчается регулирование силы света, падающего на линию объектива.
Указанная первая осветительная система (например, каждый из указанных подысточников первого источника света, второго источника света и третьего источника света) предпочтительно включает в себя один или более опорных элементов и один или более элементарных источников света (например, типа светодиодов).
Термоклей предпочтительно размещен между указанной первой осветительной системой (например, указанными опорными элементами) и вспомогательной опорной рамой в контакте с ними.
Указанная вспомогательная опорная рама предпочтительно состоит из двух противоположных боковых стенок и нижней стенки, расположенной между боковыми стенками, при этом боковые стенки прикреплены к нижней стенке, и при этом термоклей размещен между каждой боковой стенкой и нижней стенкой в контакте с ними.
Указанные опорные элементы предпочтительно расположены между боковыми стенками и прикреплены к ним, при этом термоклей размещен между опорными элементами и боковыми стенками в контакте с ними.
Указанная опорная рама и/или указанная вспомогательная опорная рама и/или указанные опорные элементы предпочтительно выполнены из алюминия.
Указанные опорные элементы и/или указанная вспомогательная опорная рама (например, указанная нижняя стенка) предпочтительно выполнены с ребрами, более предпочтительно расположенными так, чтобы они были расположены вертикально во время использования.
Один или более из признаков из трех предыдущих абзацев обеспечивают решение или уменьшение остроты проблемы, связанной с тем, что выделение большого количества тепла элементарными источниками света в первой осветительной системе (в частности, светодиодами) может привести к увеличению температуры, которое может привести к блокировке/выключению самих светодиодов. В частности, использование алюминия и/или термоклея способствует отводу выделенного тепла от элементарных источников света, при этом ребра способствуют его рассеянию в окружающей среде, и вертикальное расположение ребер при использовании способствует возникновению конвекционных движений, которые увеличивают теплообмен.
Указанные опорные элементы предпочтительно имеют поперечное сечение круглой формы для обеспечения возможности их размещения на небольшом расстоянии.
Устройство предпочтительно содержит блок привода и управления для указанных первой и второй систем получения изображений, (жестко) смонтированный на указанной опорной раме, при этом блок привода и управления выполнен с возможностью включения указанных первой и второй осветительных систем и приведения в действие указанных первой и второй камер одновременно с включением соответствующих осветительных систем.
Это уменьшает полное сопротивление силовых кабелей систем получения изображений (в частности, источников света) и, следовательно, периоды нарастания и уменьшения тока при включении источников света (например, светодиодов), и это также обеспечивает уменьшение протяженности, а также массы и числа/габаритных размеров кабелей, подлежащих укладке.
Блок привода и управления предпочтительно выполнен с возможностью:
- включения указанных первого источника света, второго источника света и третьего источника света в последовательности с чередованием; и
- приведения в действие указанной первой камеры для соответствующего получения первого, второго и третьего изображений синхронно с включением соответственно указанных первого источника света, второго источника света и третьего источника света. Таким образом, можно получить как изображение при рассеянном свете, так и два изображения при свете, падающем под скользящим углом.
Согласно его дополнительному аспекту изобретение относится к станции для анализа шин на линии по производству шин.
Станция предпочтительно содержит опору, выполненную с возможностью обеспечения опоры для шины, установленной на боковине, и с возможностью поворота шины вокруг ее оси вращения.
Указанная ось вращения предпочтительно расположена вертикально.
Указанный элемент для обеспечения перемещения устройства предпочтительно представляет собой роботизированную руку.
Более предпочтительно, если указанный элемент для обеспечения перемещения устройства представляет собой антропоморфную роботизированную руку.
Еще более предпочтительно, если указанный элемент для обеспечения перемещения устройства представляет собой антропоморфную роботизированную руку с, по меньшей мере, пятью степенями подвижности.
Устройство предпочтительно содержит одну систему определения углового положения указанной опоры (такую как кодовый датчик положения), при этом блок привода и управления выполнен с возможностью включения указанных первой осветительной системы и второй осветительной системы и приведения в действие указанных первой камеры и второй камеры в зависимости от одного сигнала углового положения опоры, передаваемого указанной одной системой определения углового положения. Таким образом, последовательность изображений линейных участков поверхности получают правильным образом независимо от скорости поворота шины, и логические схемы управления получением изображений в двух камерах освобождаются от логических функций управления поворотом, и сохраняется однородность управления устройствами.
Указанные различные участки указанной зоны предпочтительно представляют собой линейные участки поверхности.
Дополнительные признаки и преимущества станут более очевидными из подробного описания некоторых иллюстративных, но неограничивающих вариантов осуществления устройства и станции для анализа шин на линии по производству шин согласно настоящему изобретению. Такое описание будет приведено в дальнейшем со ссылкой на сопровождающие фигуры, представленные только в целях иллюстрации и, следовательно, не для ограничения, на которых:
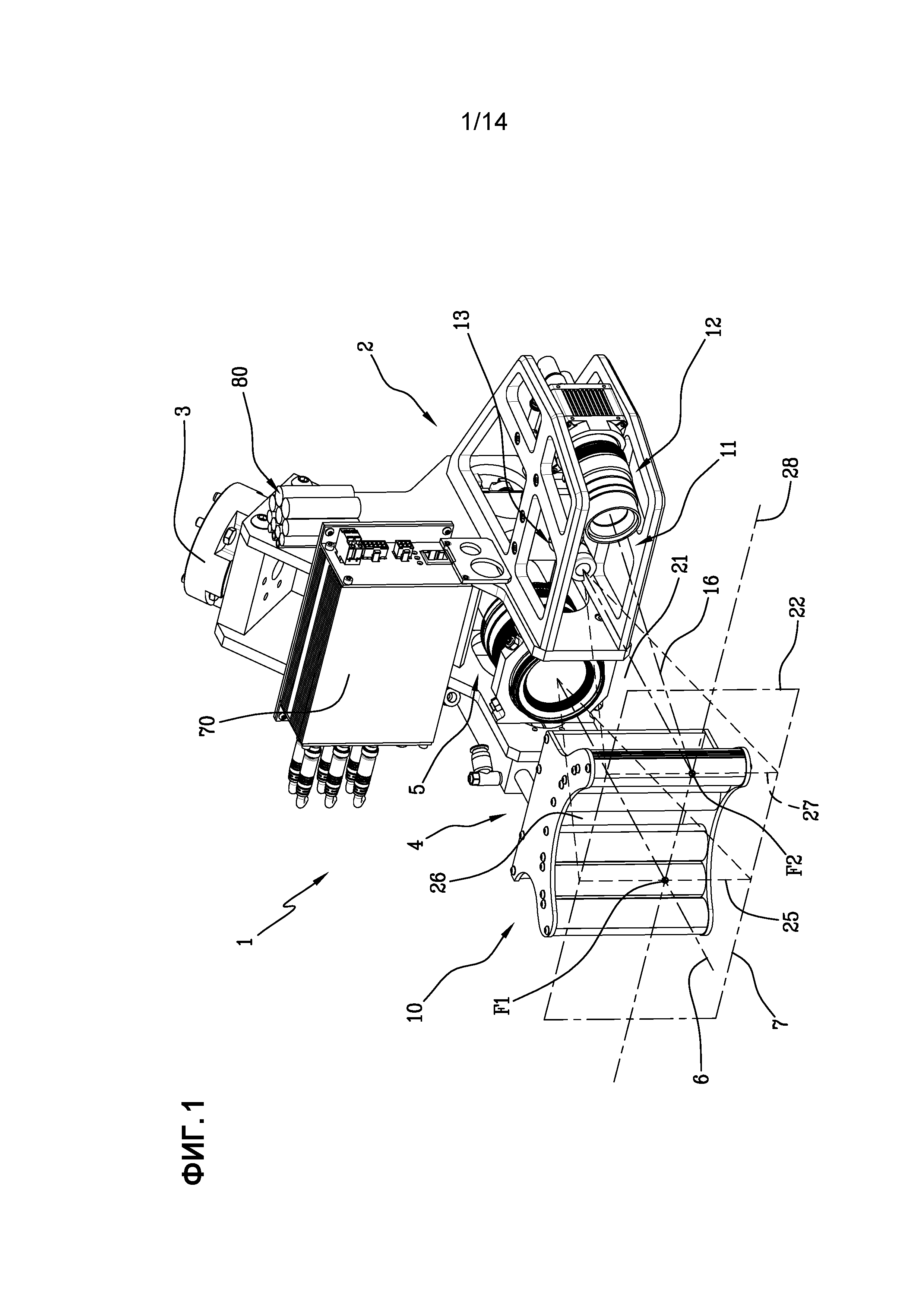
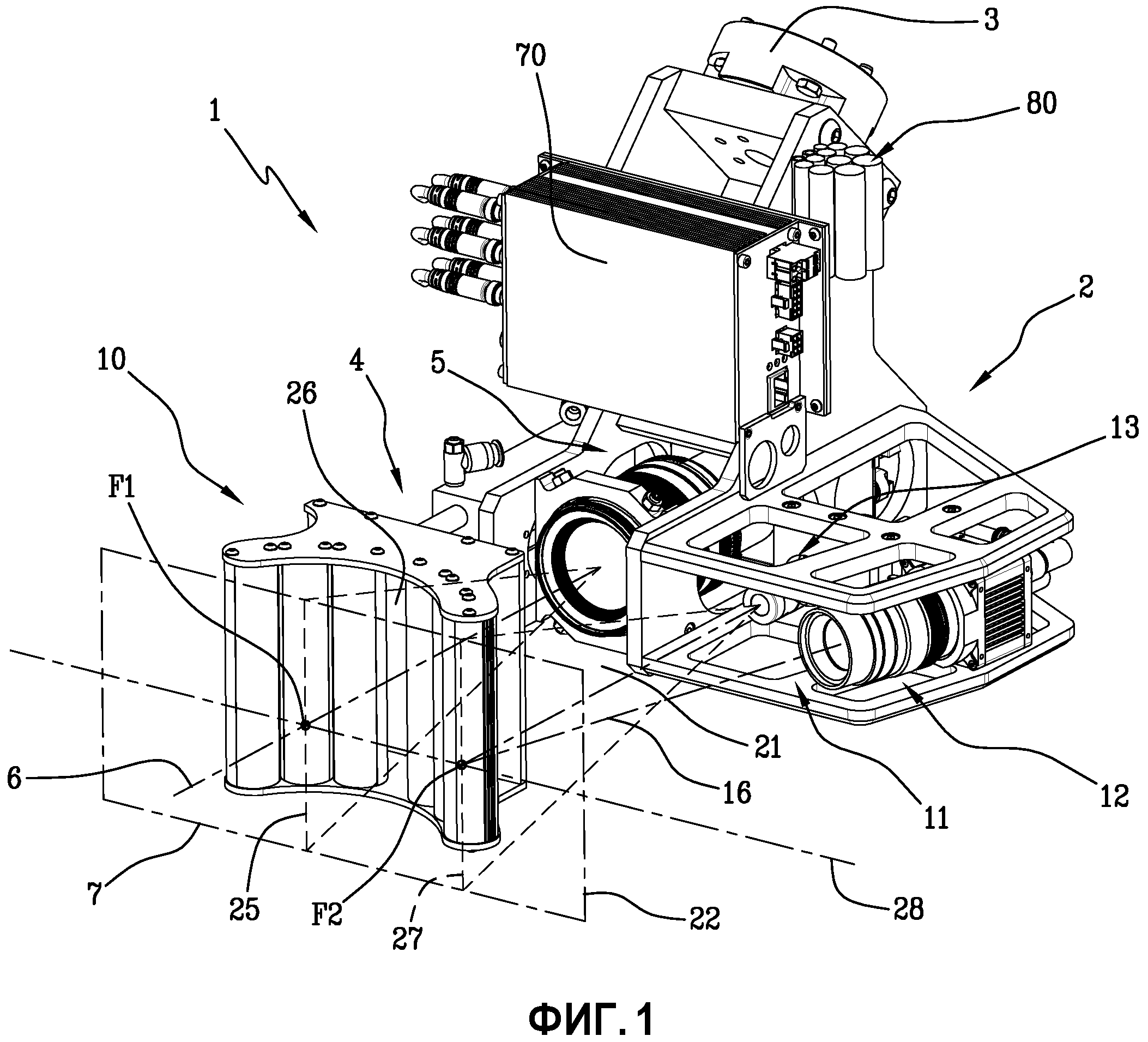
- фиг.1 показывает частичный и схематический вид в перспективе устройства для анализа шин согласно настоящему изобретению;
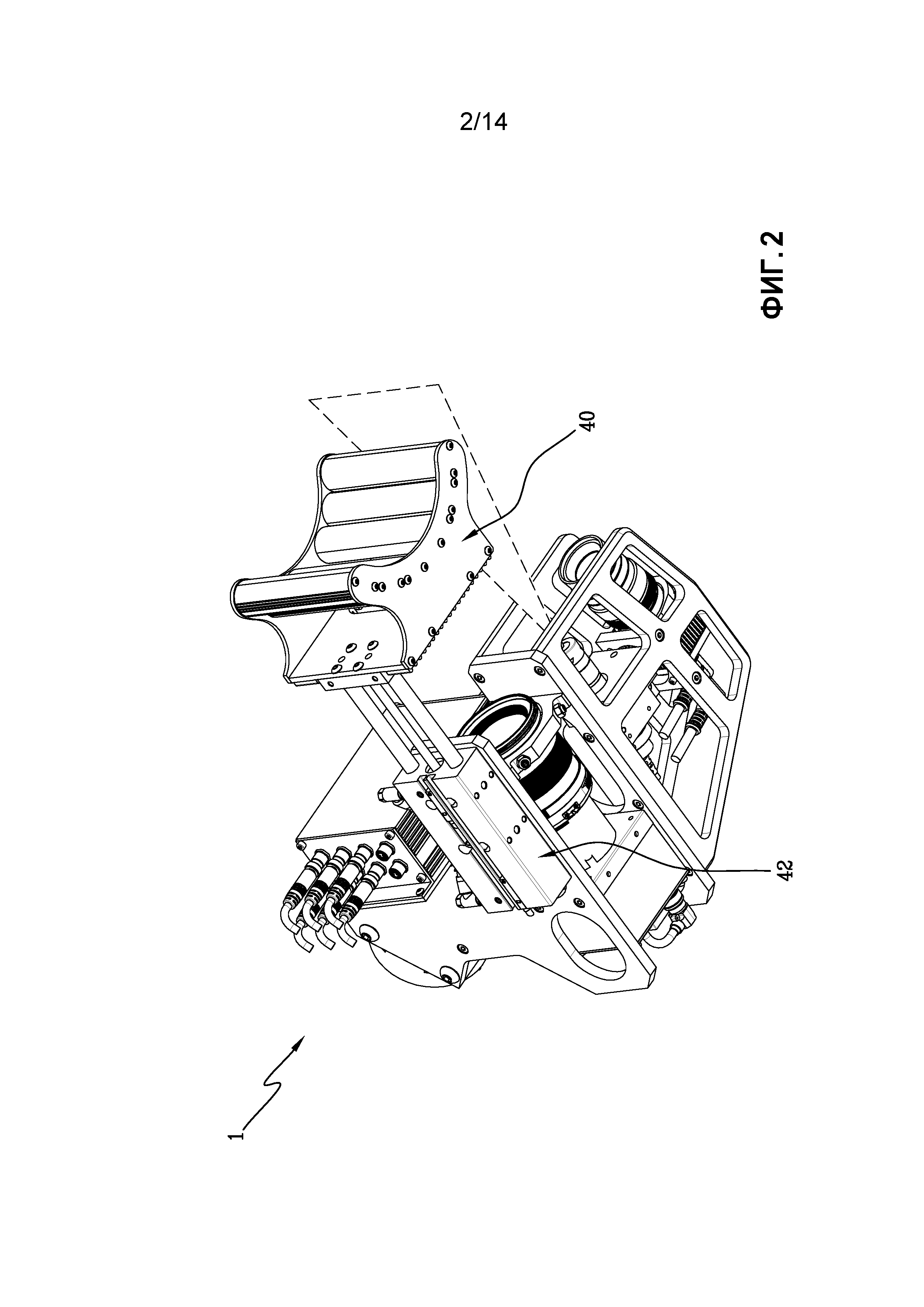
- фиг.2 показывает дополнительный вид в перспективе устройства по фиг.1 с другой стороны;
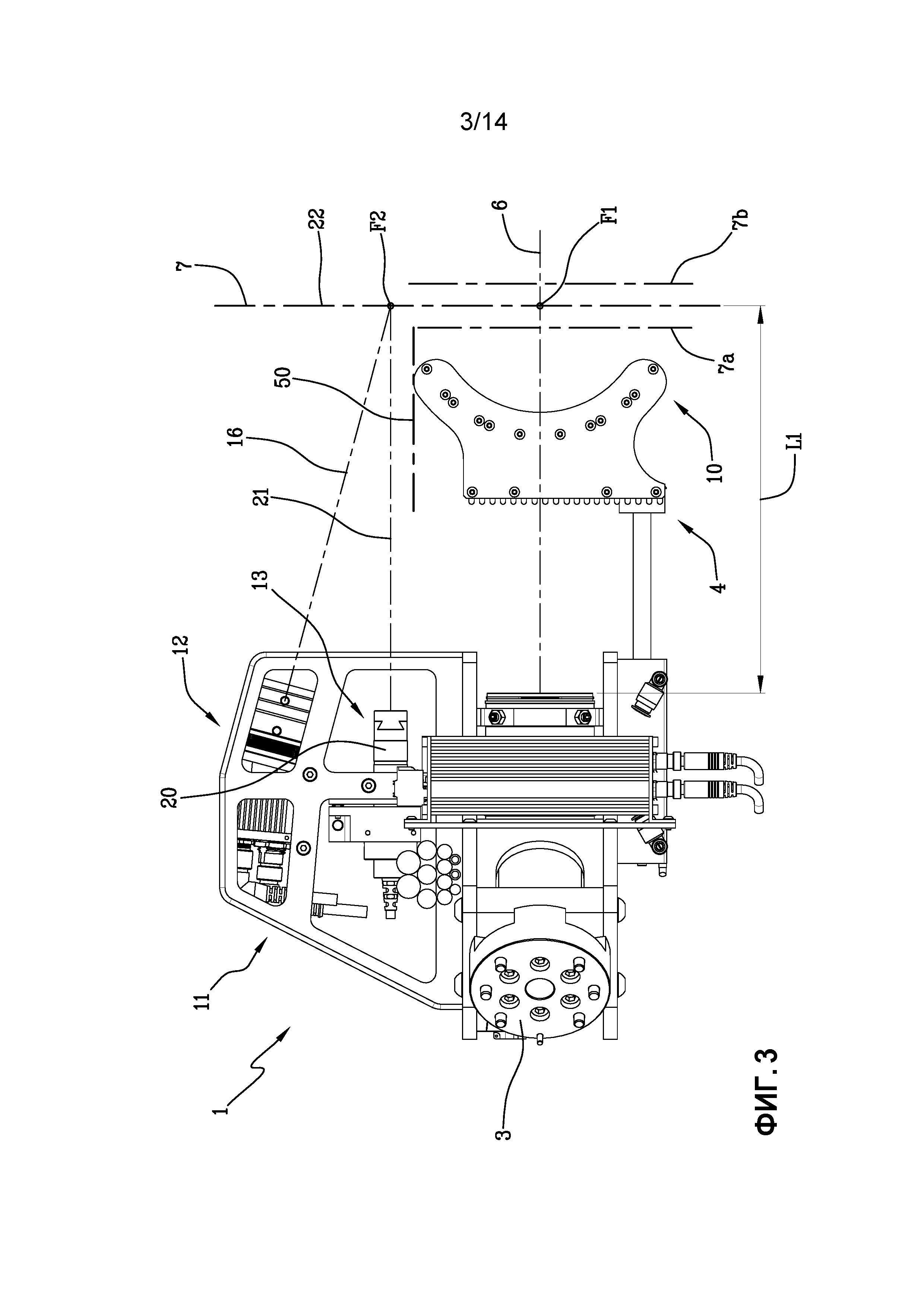
- фиг.3 показывает вид сверху устройства по фиг.1;
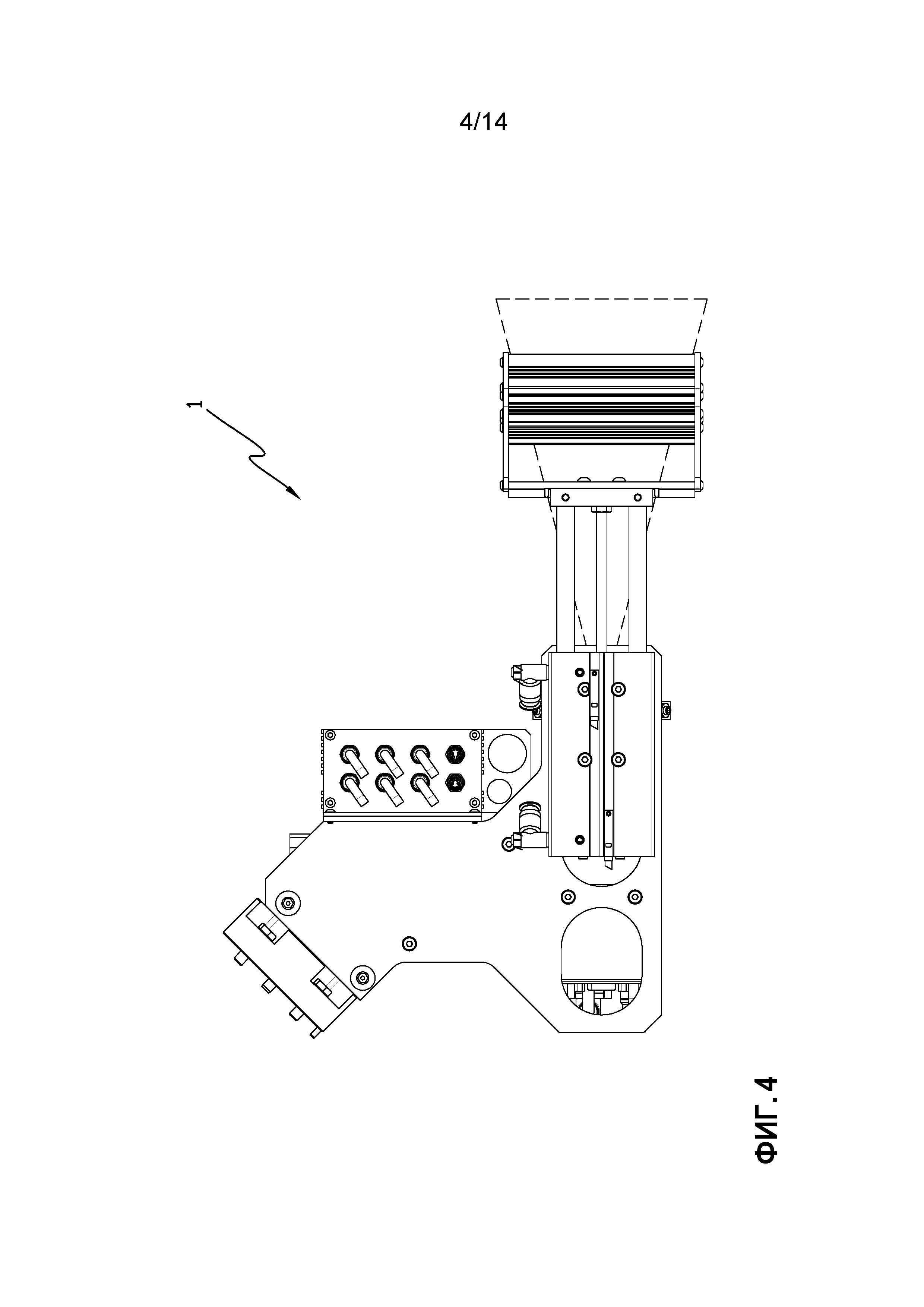
- фиг.4 показывает вид сбоку устройства по фиг.1;
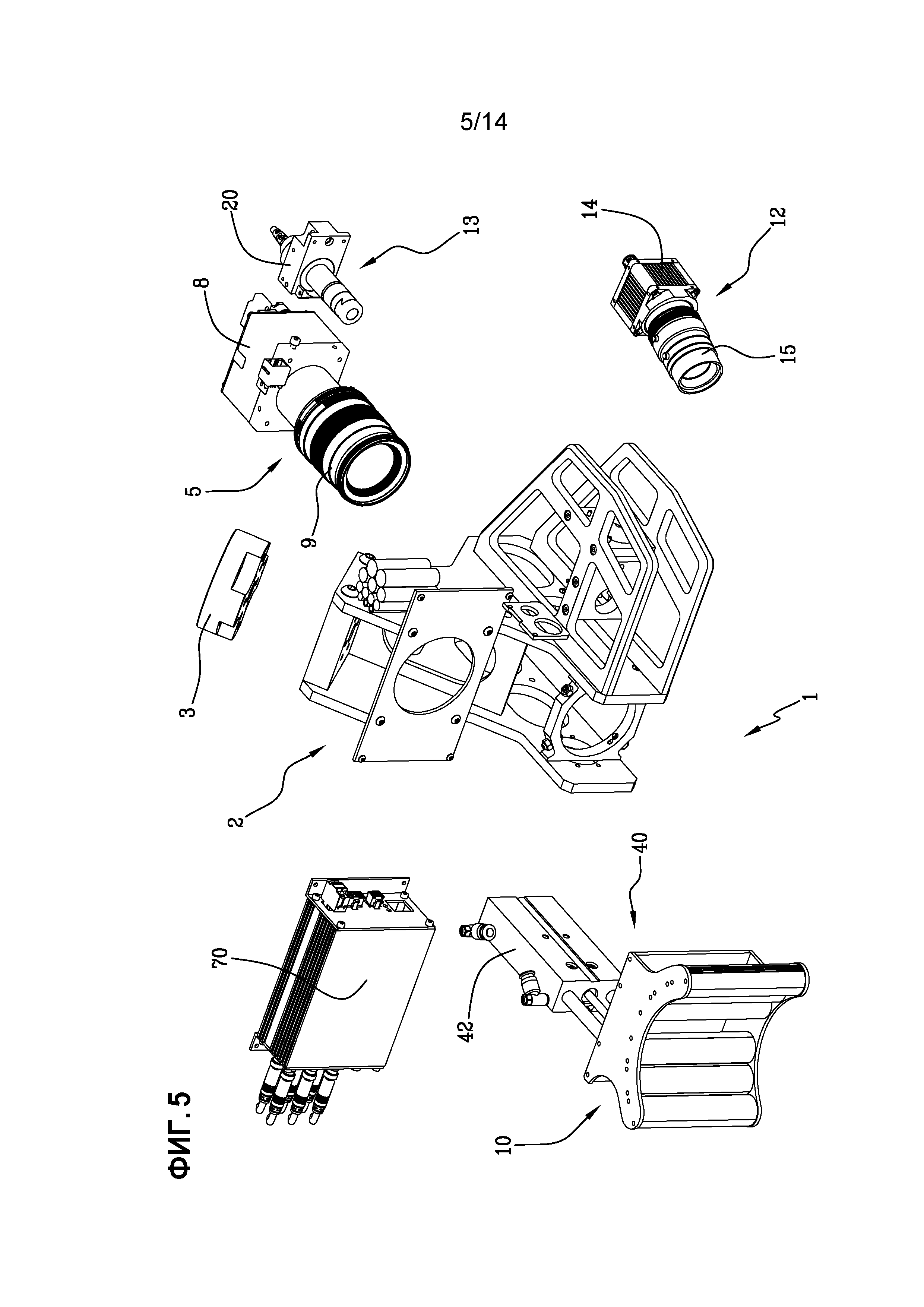
- фиг.5 показывает выполненный с частичным пространственным разделением элементов вид в перспективе устройства по фиг.1;
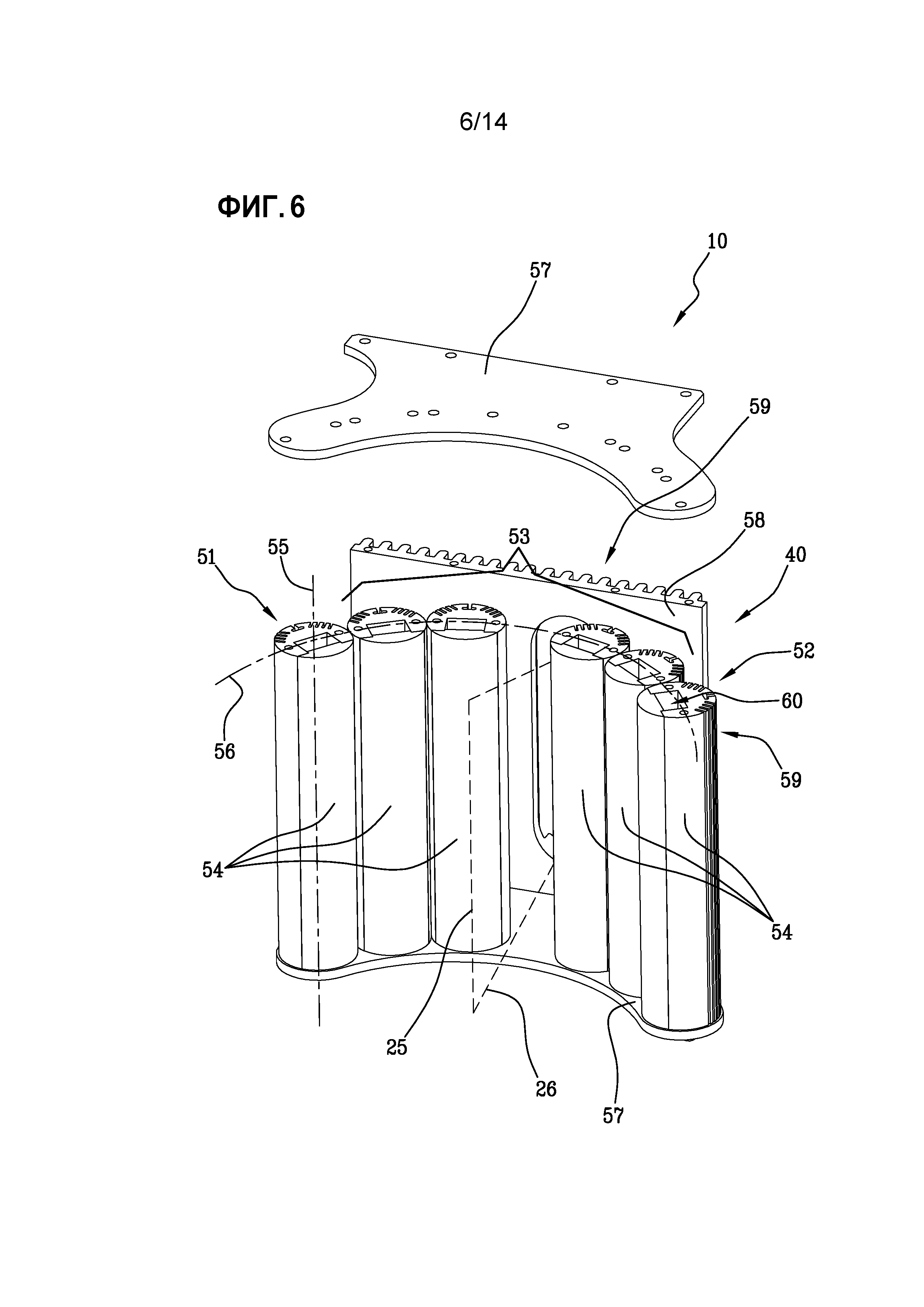
- фиг.6 показывает выполненный с частичным пространственным разделением элементов вид в перспективе компонента по фиг.5;
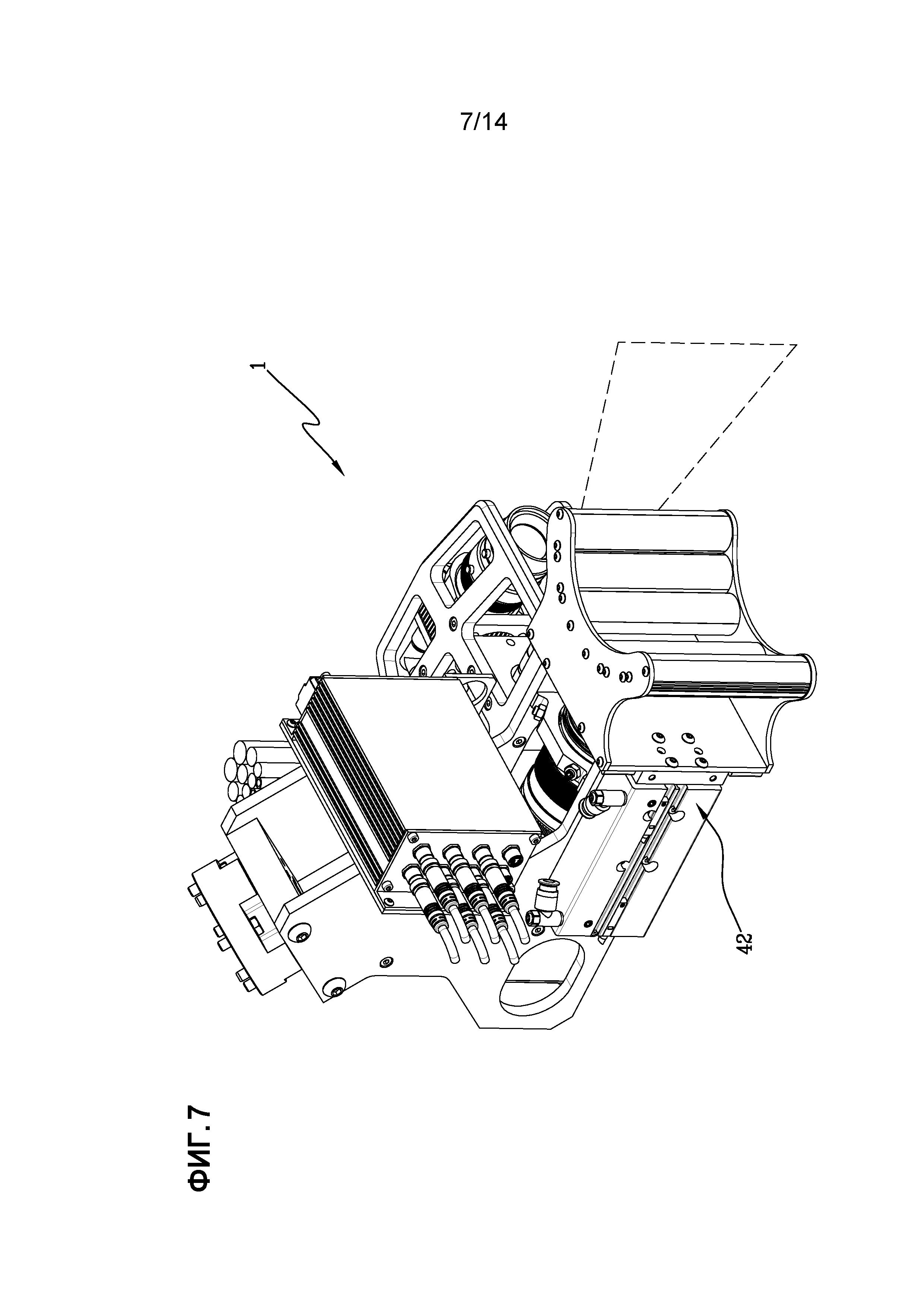
- фиг.7 показывает вид в перспективе устройства по фиг.1 во втянутой конфигурации;
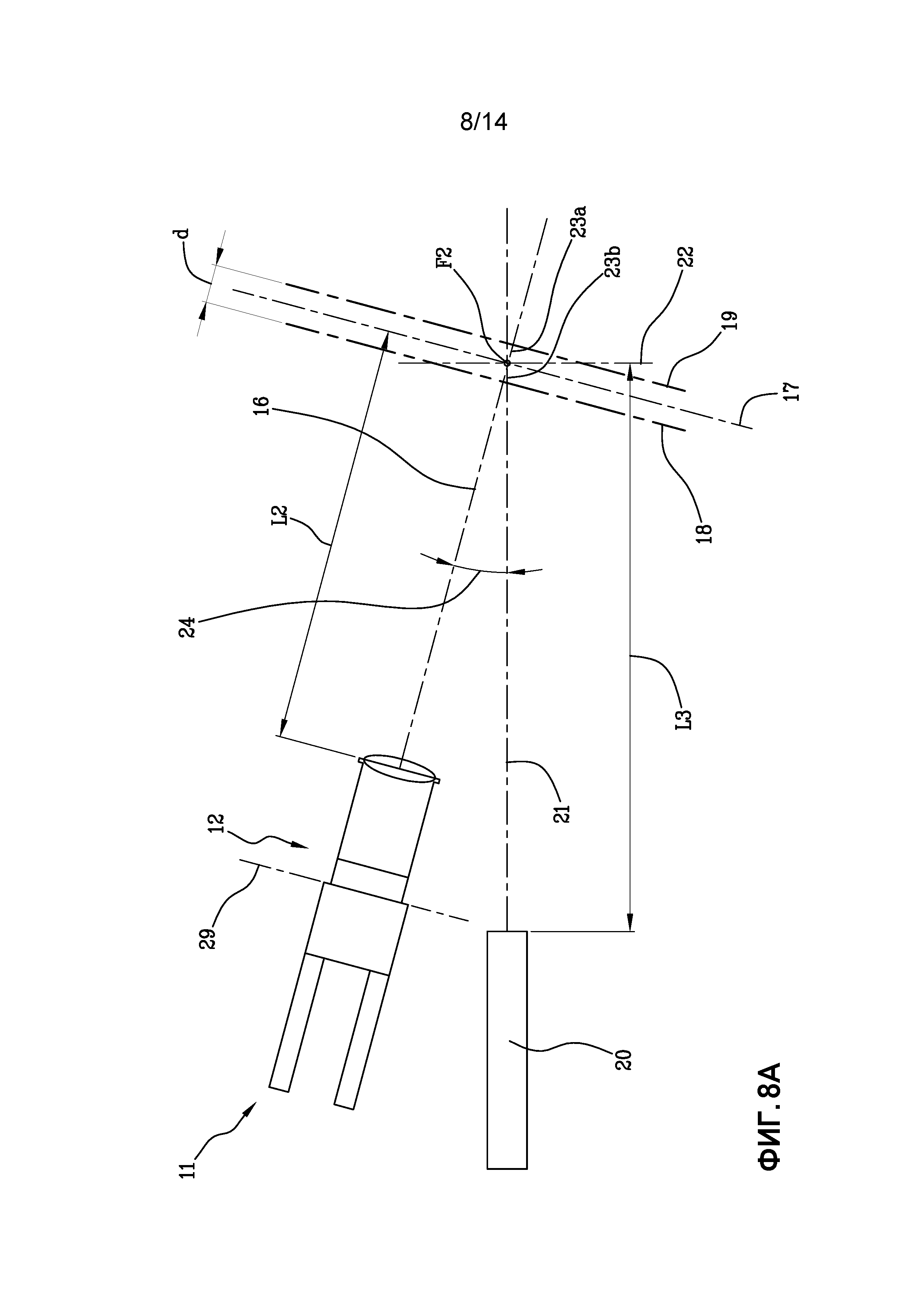
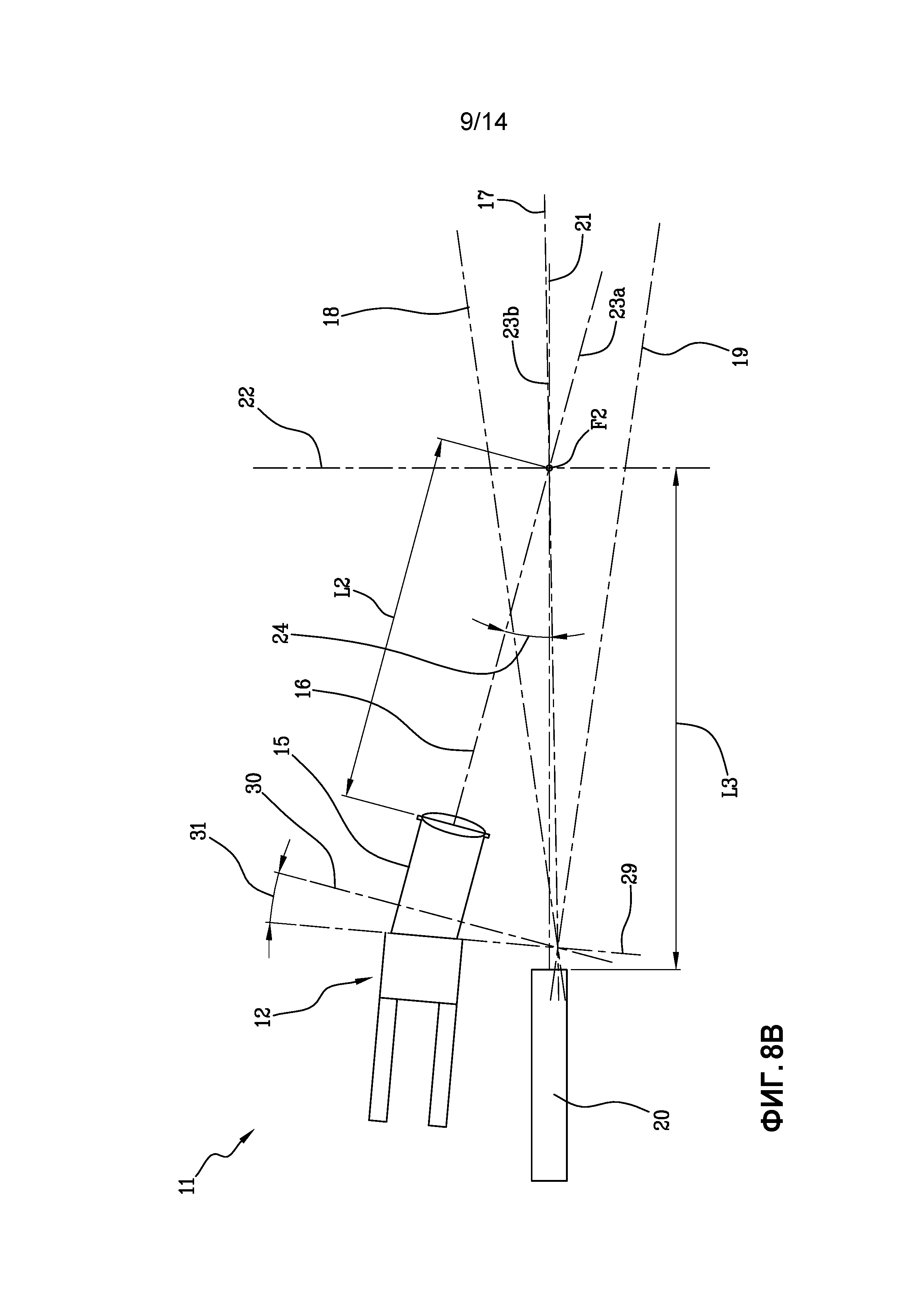
- фиг.8А и 8В схематически показывают соответственно две возможные оптические конфигурации второй системы получения изображений согласно настоящему изобретению;
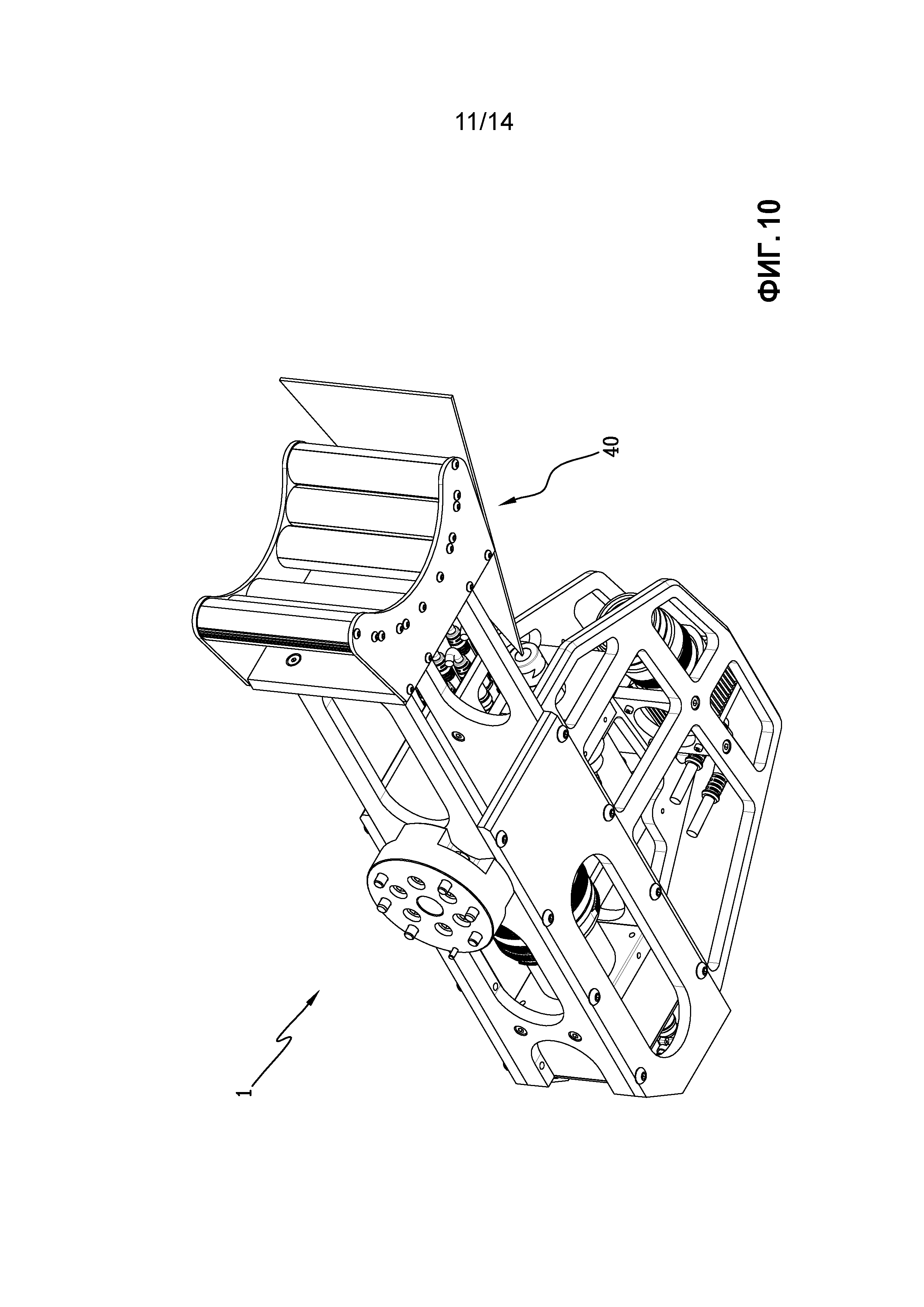
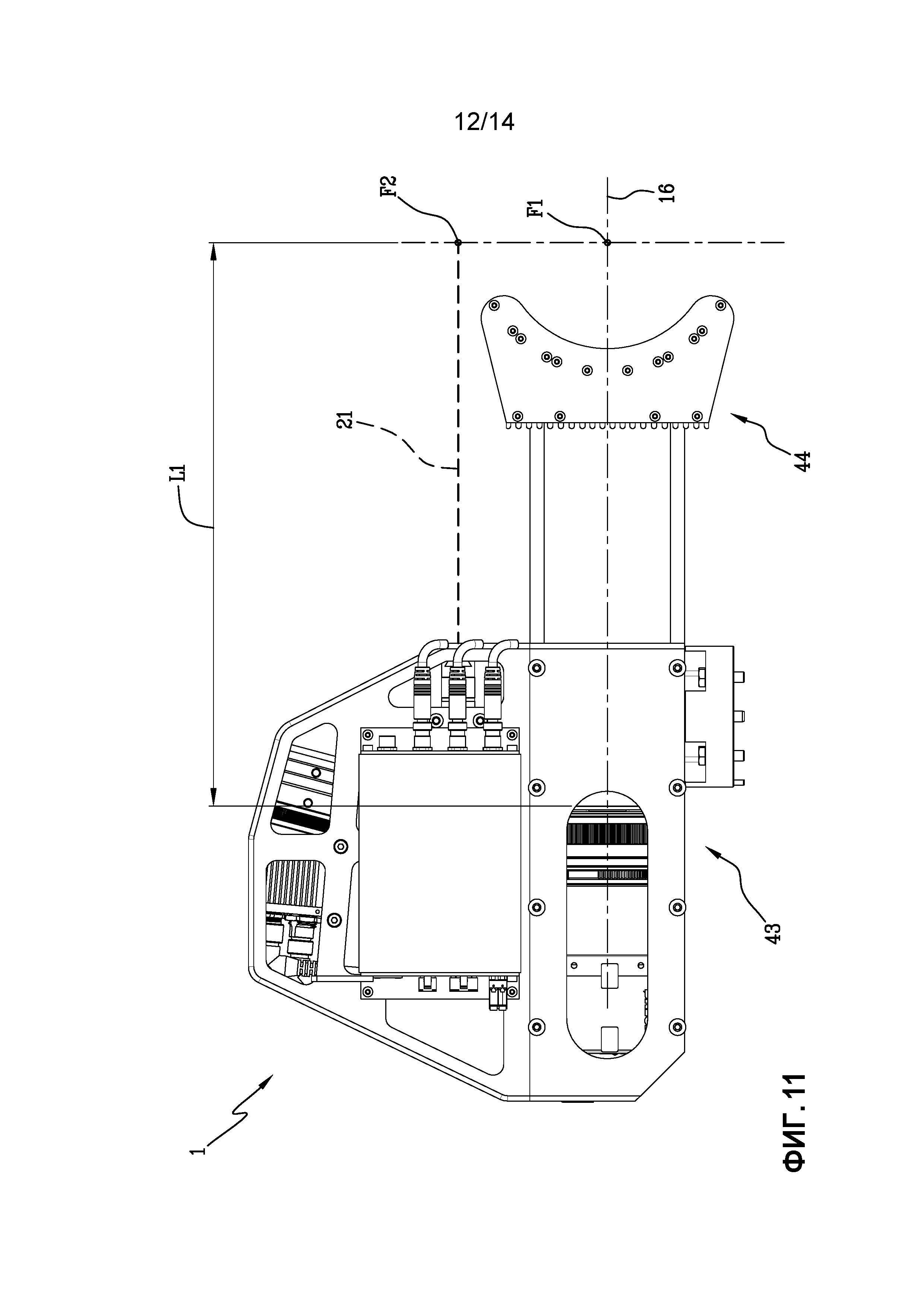
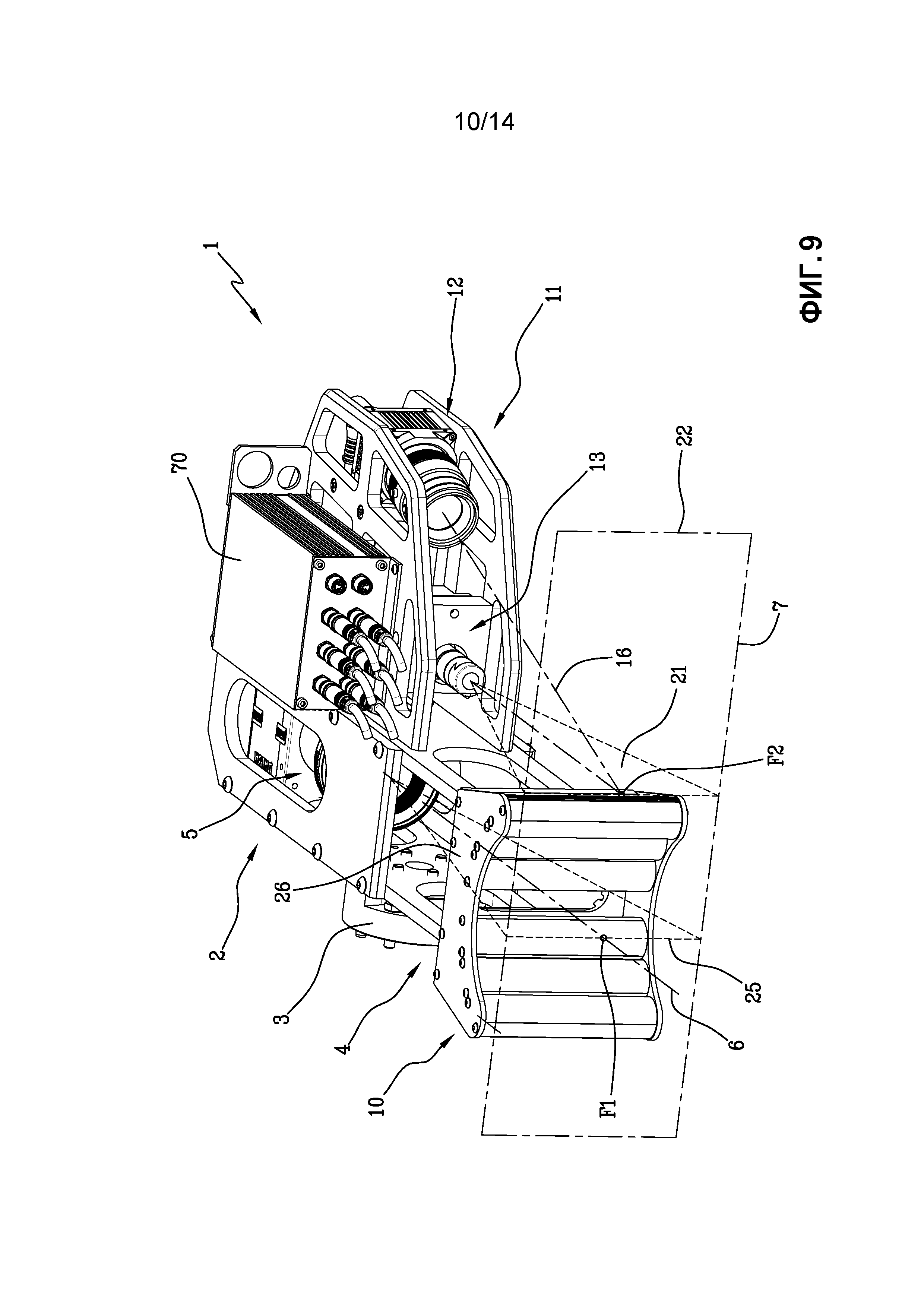
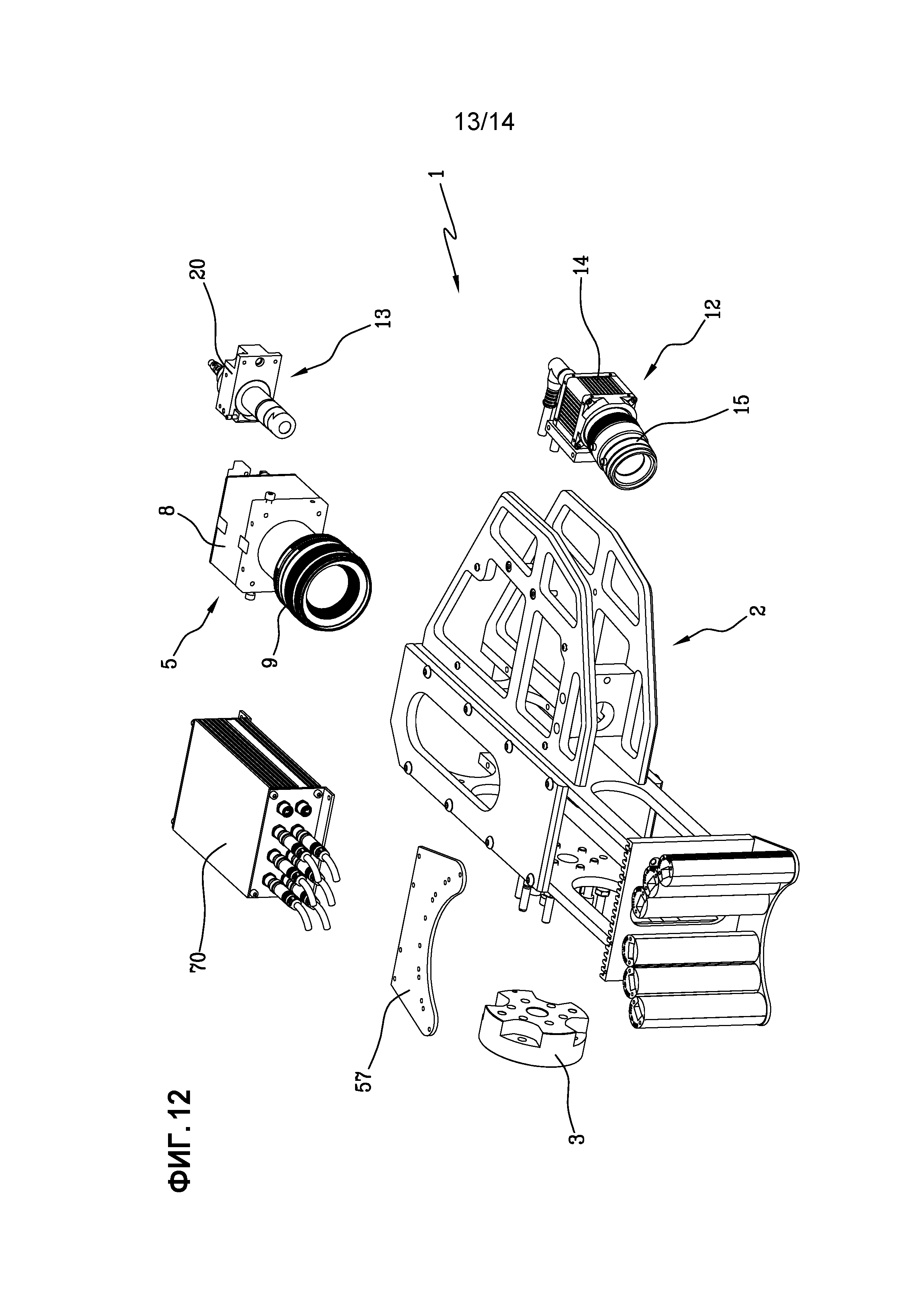
- фиг.9-12 показывают частичное и схематическое изображение дополнительного варианта осуществления устройства согласно настоящему изобретению соответственно на виде в перспективе с двух сторон, на виде сверху и на выполненном с частичным пространственным разделением элементов виде в перспективе;
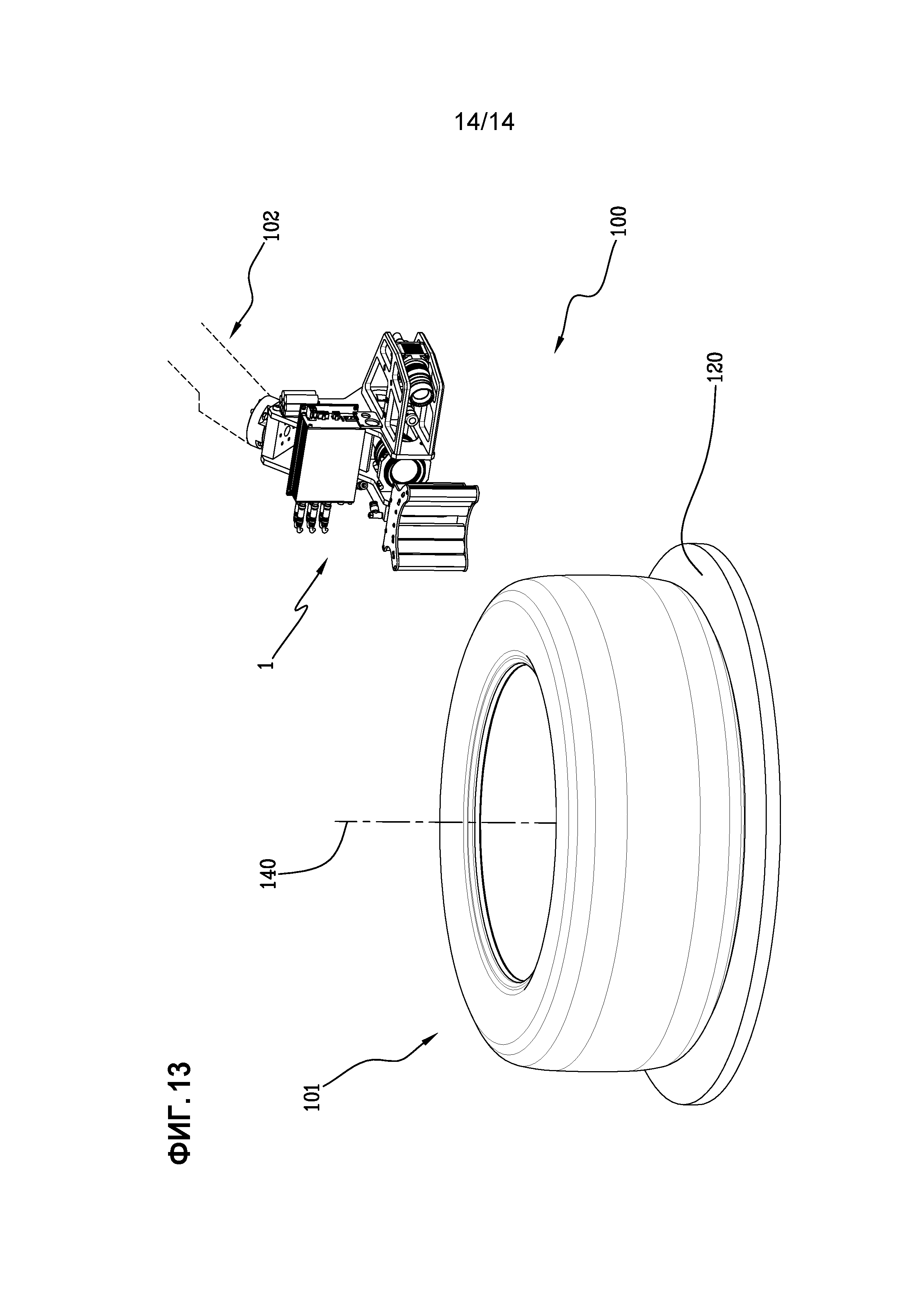
- фиг.13 показывает схематический и частичный вид станции для анализа шин согласно настоящему изобретению.
На фиг.13 ссылочная позиция 100 обозначает станцию для анализа шин на линии по производству шин.
Станция предпочтительно содержит опору 120 (например, пятое колесо), выполненное с возможностью обеспечения опоры для шины 101, установленной на боковине, и с возможностью поворота шины вокруг ее оси 140 вращения (предпочтительно расположенной вертикально).
Станция 100 содержит устройство 1 для анализа шин.
Станция предпочтительно содержит элемент 102 для обеспечения перемещения (показанный только схематически), на котором устройство 1 смонтировано для обеспечения его перемещения в пространстве. Элемент для обеспечения перемещения устройства предпочтительно представляет собой роботизированную руку, более предпочтительно антропоморфную роботизированную руку, еще более предпочтительно антропоморфную роботизированную руку с, по меньшей мере, пятью степенями подвижности. Следует отметить, что устройство 1 предпочтительно вставляется внутрь шины сверху, а не снизу через опору 120.
Устройство 1 содержит опорную раму 2 и фланец 3 для крепления опорной рамы к элементу для обеспечения перемещения устройства.
Устройство предпочтительно содержит первую систему 4 получения изображений поверхности шины, предпочтительно двумерных, смонтированную на опорной раме.
Первая система 4 получения изображений, как правило, содержит первую камеру 5, имеющую первую оптическую ось 6, первую фокальную плоскость 7 и первую глубину резкости (фиг.3 в качестве примера показывает конечные плоскости 7а, 7b при первой глубине резкости). Как правило, первая камера имеет первый механически обработанный корпус 8 (в котором размещены датчик и электронные устройства) и первый объектив 9 (в котором размещены линзы).
Первая система 4 получения изображений, как правило, содержит первую осветительную систему 10, выполненную с возможностью освещения окрестности первой фокальной точки F1, которая находится в точке пересечения между первой оптической осью и первой фокальной плоскостью.
Устройство предпочтительно содержит вторую систему 11 получения изображений, предпочтительно трехмерных изображений поверхности, смонтированную предпочтительно жестко на опорной раме.
Вторая система 11 получения изображений содержит вторую камеру 12 (как правило, состоящую из соответствующего второго механически обработанного корпуса 14 и второго объектива 15) и вторую осветительную систему 13.
Вторая камера предпочтительно представляет собой матричную камеру и имеет вторую оптическую ось 16, вторую фокальную плоскость 17 и вторую глубину резкости (фиг.8А и 8В показывают конечные плоскости 18, 19 при второй глубине резкости).
Вторая осветительная система 13 предпочтительно содержит лазерный источник 20, выполненный с возможностью излучения линейного пучка, имеющего плоскость 21 распространения, при этом вторая оптическая ось 16 имеет наклон относительно плоскости распространения.
Предпочтительно имеется, по меньшей мере, одна плоскость 22 поступательного перемещения, проходящая через первую фокальную точку F1 и образующая угол от 90°+15° до 90°-15° относительно первой оптической оси, и также проходящая через первую зону 23а пересечения между указанной второй оптической осью 16 и зоной, соответствующей второй глубине резкости. Следует отметить, что первая зона 23а пересечения представляет собой отрезок прямой.
Указанная плоскость 22 поступательного перемещения предпочтительно также проходит через вторую зону 23b пересечения между плоскостью 21 распространения и указанной второй глубиной резкости.
Следует отметить, что вторая зона 23b пересечения представляет собой плоскую поверхность.
Для ясности фигуры показывают плоскость 22 поступательного перемещения, точно ортогональную к первой оптической оси, но она может представлять собой любую плоскость из пучка плоскостей, проходящих через первую фокальную точку F1 и по существу ортогональных к первой оптической оси, которые также проходят через первую зону 23а пересечения и предпочтительно через вторую зону 23b пересечения.
Кроме того, на фигурах рассматриваемая плоскость 22 поступательного перемещения совпадает с первой фокальной плоскостью 7, но настоящее изобретение также охватывает варианты осуществления (непоказанные), в которых первая фокальная плоскость имеет наклон относительно плоскости, ортогональной к оптической оси, (например, посредством устройств типа показанного на фиг.8В при рассмотрении второй системы получения изображений).
Плоскость 22 поступательного перемещения предпочтительно проходит через вторую фокальную точку F2, которая находится в точке пересечения между плоскостью 21 распространения, второй фокальной плоскостью 17 и второй оптической осью.
Первая камера предпочтительно является линейной и имеет линию 25 объектива, лежащую на пересечении между первой фокальной плоскостью и оптической плоскостью 26, проходящей через первую оптическую ось, и линейный датчик линейной камеры. Линия объектива в качестве примера имеет длину, составляющую приблизительно 100 мм.
Линия 25 объектива и линия 27 пересечения между плоскостью 22 поступательного перемещения и плоскостью 21 распространения предпочтительно параллельны друг другу и по существу выровнены относительно направления 28 поступательного перемещения, ортогонального к ним и принадлежащего плоскости поступательного перемещения (см., например, фиг.1).
Вторая камера 12 предпочтительно (как показано на фигурах в качестве примера) расположена со стороны, противоположной по отношению к первой камере 5 относительно лазерного источника 20.
Фиг.8А и 8В схематически показывают вид сверху второй системы 11 получения изображений в двух соответствующих вариантах осуществления настоящего изобретения.
На обеих фигурах вторая оптическая ось 16 образует острый угол 24 с плоскостью распространения, в качестве примера равный 15°.
В качестве примера расстояние L2 вдоль второй оптической оси между наружной оптической поверхностью второй камеры и второй фокальной точкой равно 210 мм, и расстояние L3 вдоль оси распространения между наружной оптической поверхностью лазерного источника и второй фокальной точкой равно 285 мм.
На фиг.8А вторая оптическая ось, как это обычно происходит, ортогональна к плоскости 29 изображения в датчике. В этой ситуации фокальная плоскость 17 также ортогональна ко второй оптической оси, как и крайние плоскости 18 и 19 для данной глубины резкости. Если предположить, что максимальное альтиметрическое отклонение, подлежащее обнаружению на поверхности шины, равно h (составляет, например, порядка нескольких десятков мм), то поскольку анализируемая поверхность шины (более точно, ее плоскость на данной высоте) расположена по существу в плоскости 22 поступательного перемещения, из этого следует, что длина d, соответствующая глубине резкости, должна быть такой, чтобы она, по меньшей мере, включала такое отклонение h в плоскости 21 распространения.
Как упомянуто выше, выражение «расположенная вблизи плоскости поступательного перемещения» означает, что локальная плоскость расположения поверхности (определяемая как любая плоскость, проходящая на заданной высоте поверхности шины, предпочтительно плоскость, проходящая на промежуточной высоте по отношению к максимальному отклонению высоты поверхности) на указанной первой оптической оси остается в пределах указанной первой глубины резкости (при этом указанная плоскость расположения совпадает с указанной, по меньшей мере, одной плоскостью поступательного перемещения, когда плоскость расположения поверхности проходит через первую фокальную точку).
В конфигурации по фиг.8А, в которой плоскость 21 распространения ортогональна к плоскости 22 поступательного перемещения (и параллельна оптической оси первой камеры) и в которой вторая оптическая ось имеет наклон относительно нормали к плоскости поступательного перемещения, вторая фокальная плоскость 17 имеет наклон относительно плоскости 22 поступательного перемещения. В этой ситуации длина d, соответствующая глубине резкости и определяемая вдоль второй оптической оси, должна быть больше или равна dmin=h*cosα, где α представляет собой величину острого угла 24. Следовательно, такая минимальная длина dmin меньше, чем в сравнительной конфигурации, в которой вторая фокальная плоскость расположена параллельно плоскости 22 поступательного перемещения, при этом dmin=h.
Как показано на фиг.8В, плоскость 29 изображения в датчике камеры предпочтительно образует вместе с базовой плоскостью 30, ортогональной ко второй оптической оси и проходящей через второй объектив 15, острый угол 31 с вершиной на стороне, где находится лазерный источник, и острый угол 31 в качестве примера равен 10°.
Таким образом, вторая фокальная плоскость 17 образует почти нулевой острый угол с плоскостью 21 распространения, и вторая глубина резкости в зоне, представляющей интерес, в окрестности плоскости 22 поступательного перемещения соответствует окрестности плоскости 21 распространения, что обеспечивает возможность легкой фокусировки отраженной линии излучения лазера вдоль отклонения h даже при открытой апертуре.
Устройство предпочтительно содержит непрозрачный разделитель 50 (показанный на фиг.3 только схематически), расположенный между первой осветительной системой 10 и первой зоной 23а пересечения. Например, разделитель может быть прикреплен к вспомогательной опорной раме 40. Непрозрачный разделитель может быть выполнен из жесткого материала (удерживаемого при использовании на небольшом расстоянии от поверхности шины) или из гибкого материала, такого как волосяная щетка, который при использовании скользит по поверхности.
Устройство предпочтительно содержит вспомогательную опорную раму 40, на которой жестко смонтирована первая осветительная система.
В одном варианте осуществления, таком как показанный в качестве примера на фиг.1-7, вспомогательная опорная рама установлена на опорной раме с возможностью поступательного прямолинейного перемещения, предпочтительно вдоль направления, параллельного первой оптической оси 6, из положения, проксимального по отношению к первой камере (показанного на фиг.7), в положение, дистальное по отношению к первой камере (фиг.1-4). В качестве примера устройство содержит линейный исполнительный механизм 42 (например, пневматический), жестко смонтированный на основной опорной раме 2 и выполненный с возможностью обеспечения прямолинейного перемещения одного или более поршней на дистальном конце, на котором закреплена вспомогательная опорная рама.
В одном варианте осуществления, таком как показанный в качестве примера на фиг.9-12, первая и вторая камеры и лазерный источник жестко смонтированы на опорной раме вблизи первого конца 43 устройства, и первая осветительная система жестко смонтирована на вспомогательной опорной раме 40, в свою очередь, жестко прикрепленной к опорной раме 2 вблизи второго конца 44, противоположного в продольном направлении по отношению к первому концу 43.
В качестве примера расстояние L1 вдоль первой оптической оси между наружной оптической поверхностью первой камеры и первой фокальной точкой равно 320 мм, и объектив 9 первой камеры имеет фокусное расстояние 50 мм.
Для сравнения в варианте осуществления, показанном на фиг.1-4, такое расстояние L1 в выдвинутой конфигурации в качестве примера равно 220 мм, и используемый объектив имеет фокусное расстояние 35 мм.
Первая осветительная система предпочтительно включает в себя первый источник 51 света, второй источник 52 света и третий источник 53 света, выполненные с возможностью излучения соответственно первого, второго и третьего световых излучений для освещения указанной окрестности первой фокальной точки (например, линии 25 объектива).
Первый источник 51 света и второй источник 52 света предпочтительно расположены соответственно с противоположных сторон и зеркально по отношению к оптической плоскости 26, и третий источник 53 света расположен между первым и вторым источниками.
Каждый из первого и второго источников света предпочтительно выполнен с возможностью освещения линии 25 объектива соответствующим светом, падающим под скользящим углом, и третий источник света выполнен с возможностью освещения линии 25 объектива рассеянным светом.
Каждый из первого источника света, второго источника света и третьего источника света предпочтительно содержит один или более соответствующих подысточников 54, каждый из которых имеет соответствующее направление 55 доминирующей протяженности, по существу параллельное линии объектива.
Третий источник 53 света предпочтительно содержит множество соответствующих подысточников 54, например, четыре подысточника, распределенных симметрично относительно оптической плоскости.
Каждый из первого источника света и второго источника света предпочтительно содержит один подысточник 54.
Соответствующие подысточники предпочтительно являются одинаковыми по конструкции и/или размерам.
Соответствующие подысточники предпочтительно проходят прямолинейно вдоль направления 55 доминирующей протяженности.
Подысточники первого, второго и третьего источников света предпочтительно расположены на линии 56, которая лежит в плоскости, ортогональной к линии объектива, имеет вогнутую сторону, обращенную к линии объектива, и в качестве примера имеет форму дуги окружности.
Все подысточники, расположенные с одной стороны оптической плоскости, предпочтительно распределены с одинаковым расстоянием между ними.
Каждый подысточник 54 предпочтительно содержит опорный элемент и один или, как правило, больше элементарных источников света (например, типа светодиодов), которые не показаны и размещены в полости 60. Опорные элементы предпочтительно имеют круглое поперечное сечение. На фигуре опорные элементы показаны только схематически, при этом следует понимать, что передняя часть опорных элементов является прозрачной и, как правило, состоит из стекла (например, рассеивающего), отдельного от остальной части опорного элемента. Такая стеклянная передняя часть выполняет функцию защиты светодиодов от внешних факторов и служит в качестве линзы, выполненной с возможностью концентрации световых лучей, излучаемых самим светодиодом, что предотвращает рассеяние света, полезного для получения изображений.
Вспомогательная опорная рама 40 предпочтительно состоит из двух противоположных боковых стенок 57 и нижней стенки 58, расположенной между боковыми стенками, при этом боковые стенки прикреплены к нижней стенке, при этом термоклей размещен между каждой боковой стенкой и нижней стенкой в контакте с ними.
Опорные элементы предпочтительно расположены между боковыми стенками 57 и прикреплены к ним, при этом термоклей размещен между опорными элементами и боковыми стенками 57 в контакте с ними.
Указанные опорные элементы и/или нижняя стенка 58 предпочтительно выполнены с соответствующими ребрами 59, расположенными так, чтобы они были расположены вертикально во время использования.
Устройство предпочтительно содержит блок 70 привода и управления для первой и второй систем получения изображений, жестко смонтированный на опорной раме, при этом блок привода и управления запрограммирован для включения первой и второй осветительных систем и приведения в действие первой и второй камер одновременно с включением соответствующих осветительных систем.
Следует отметить, что на фигурах силовые кабели и/или кабели управления и/или кабели связи показаны только частично.
Блок привода и управления предпочтительно выполнен с возможностью:
- включения первого источника света, второго источника света и третьего источника света в последовательности с чередованием; и
- приведения в действие первой камеры для соответствующего получения первого, второго и третьего изображений синхронно с включением соответственно первого источника света, второго источника света и третьего источника света.
Пневматическая шина
Способ и установка для производства покрышек
Способ и устройство для сборки шин
Способ и установка для сборки невулканизированных шин для колес транспортных средств
Способ и установка для производства шин для колес транспортного средства
Способ конструирования шипованной шины и шипованная шина, полученная этим способом
Покрышка для колес большегрузных транспортных средств
Шина для автомобиля
Зимняя шина
Способ и установка для сборки шин для колес транспортных средств
Способ и устройство контроля шин в производственной линии
Способ контроля изготовления шин для колес транспортных средств
Способ и устройство для детектирования дефектов на шинах в процессе производства шин
Способ и устройство для контроля над шинами или соответствующими полуфабрикатами в производственной линии
Способ и установка для сборки шин
Способ и устройство обнаружения дефектов на поверхности шин
Способ и устройство для контроля шин на линии для производства шин
Способ и линия контроля шин для колес транспортных средств
Способ контроля качества шин для колес транспортных средств
Способ контроля качества изготовления шин и установка для изготовления шин

