Результат интеллектуальной деятельности: СПОСОБ ПОМОЩИ ПРИ ДВИЖЕНИИ И УСТРОЙСТВО УПРАВЛЕНИЯ ВОЖДЕНИЕМ
Вид РИД
Изобретение
Область техники, к которой относится изобретение
[0001] Настоящее изобретение направлено на транспортное средство, допускающее переключение между вождением вручную водителем и автоматизированным вождением, и относится к способу помощи при движении, который включает в себя изучение данных движения во время вождения вручную водителем, и к устройству управления вождением, которое применяет результат изучения к характеристикам движения для автоматизированного вождения.
Уровень техники
[0002] Традиционно, чтобы обеспечивать снижение ощущения непривычности, которое водитель испытывает во время автоматизированного вождения, устройство управления вождением, которое изучает операции вождения при вождении вручную водителем, раскрыто в качестве патентного документа 1. С помощью устройства управления вождением, раскрытого в патентном документе 1, задаются элементы окружения, такие как число полос движения и погода, и во время вождения вручную, окружения вождения указываются на основе элементов окружения, и операции вождения водителем изучаются при ассоциировании с окружением вождения.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2015-89801
Сущность изобретения
Техническая задача
[0004] Тем не менее, при изучении тормозного расстояния (тормозного пути) для случая, в котором транспортное средство останавливается на перекрестке общей дороги, данные движения имеют большое варьирование даже при идентичном состоянии окружения; таким образом, возникает такая проблема, что точное изучение в отношении тормозного расстояния, которое основано на ощущении водителя, не может выполняться.
[0005] Настоящее изобретение предлагается с учетом вышеописанной фактической обстановки, и его задача заключается в том, чтобы предоставлять способ помощи при движении и устройство управления вождением, которые обеспечивают точное изучение в отношении тормозного расстояния, которое основано на ощущении водителя.
Решение задачи
[0006] Чтобы разрешать вышеописанную проблему, при использовании способа помощи при движении и устройства управления вождением согласно аспекту настоящего изобретения, изучается тормозное расстояние для случая остановки на перекрестке во время вождения вручную водителем, и предпочтительно изучается тормозное расстояние для случая отсутствия едущего впереди транспортного средства, находящегося впереди транспортного средства.
Преимущества изобретения
[0007] Согласно настоящему изобретению, можно точно изучать тормозное расстояние, которое основано на ощущении водителя.
Краткое описание чертежей
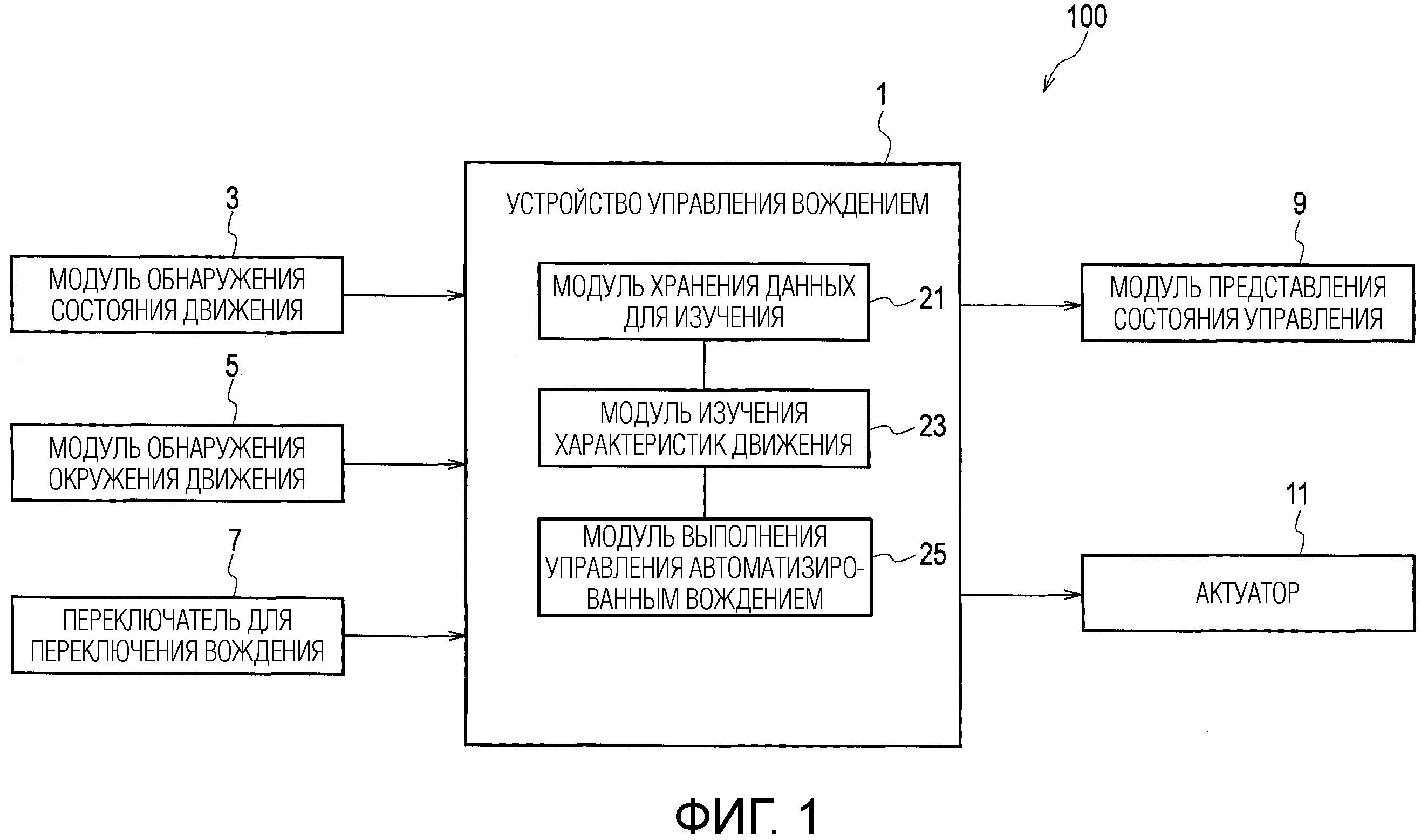
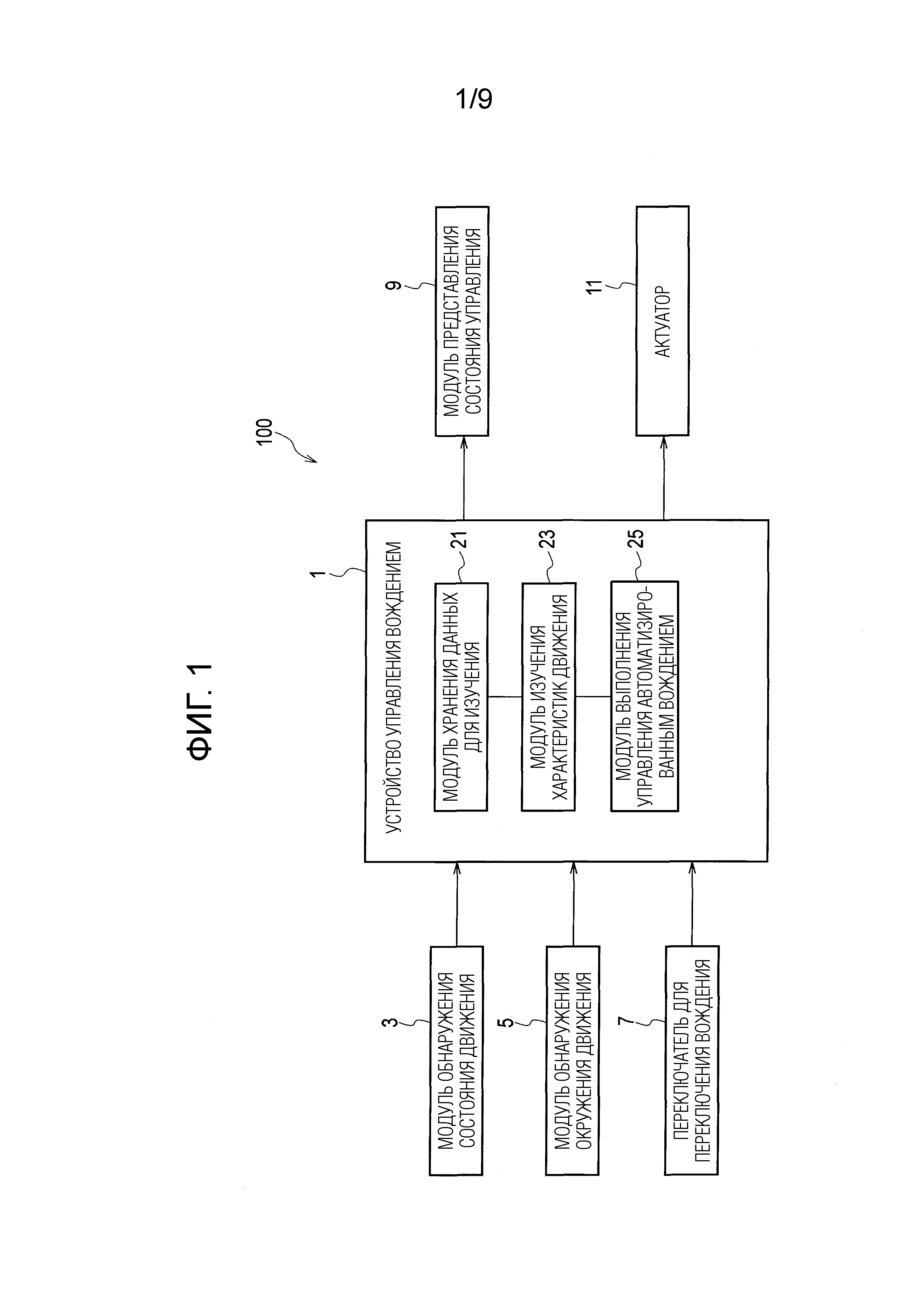
[0008] Фиг. 1 является блок-схемой, которая иллюстрирует конфигурацию системы управления вождением, включающей в себя устройство управления вождением согласно варианту осуществления настоящего изобретения.
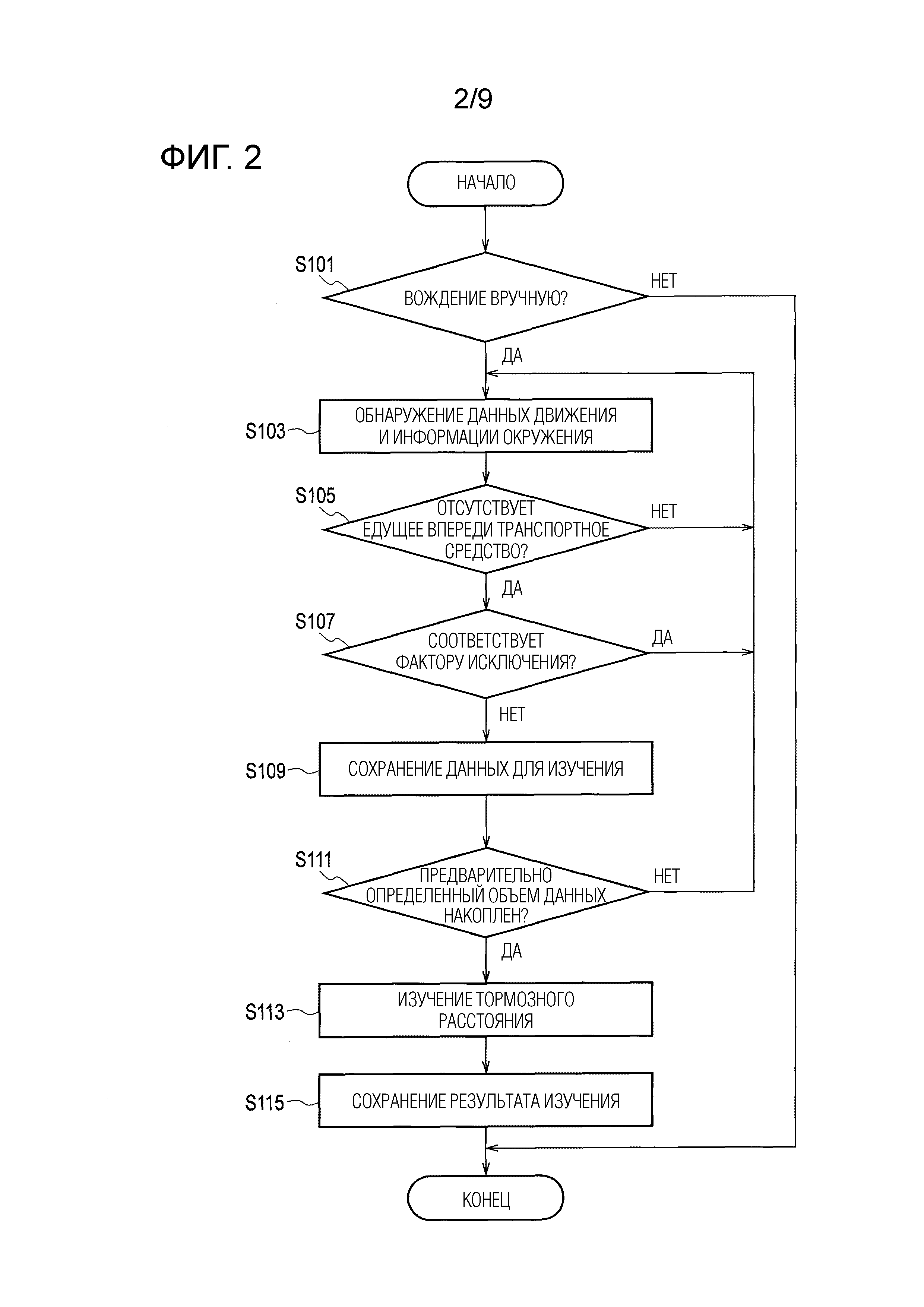
Фиг. 2 является блок-схемой последовательности операций способа, которая иллюстрирует процедуру обработки для обработки изучения характеристик движения посредством устройства управления вождением согласно варианту осуществления настоящего изобретения.
Фиг. 3 является схемой, которая иллюстрирует пример данных, введенных посредством обработки изучения характеристик движения согласно варианту осуществления настоящего изобретения.
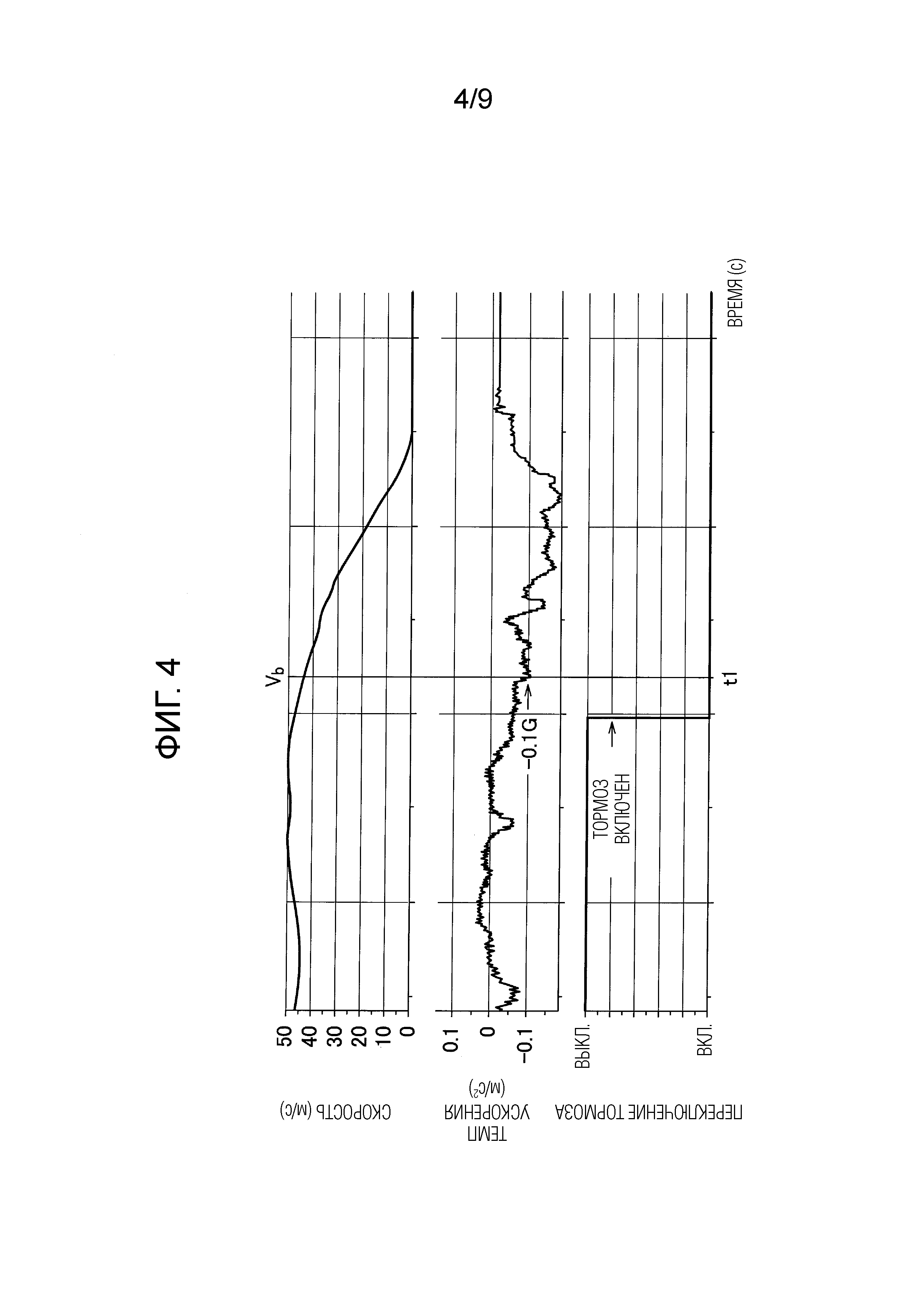
Фиг. 4 является схемой для описания скорости при начале замедления и тормозного расстояния для случая, в котором транспортное средство останавливается на перекрестке.
Фиг. 5 является схемой для описания коэффициентов множественного регрессионного анализа, выполняемого при обработке изучения характеристик движения согласно варианту осуществления настоящего изобретения.
Фиг. 6 является схемой, которая иллюстрирует пример данных, которые указывают взаимосвязь скорости при начале замедления и тормозного расстояния для случая отсутствия едущего впереди транспортного средства.
Фиг. 7 является схемой, которая иллюстрирует пример данных, которые указывают взаимосвязь скорости при начале замедления и тормозного расстояния не только для случая отсутствия едущего впереди транспортного средства, но и для всех случаев.
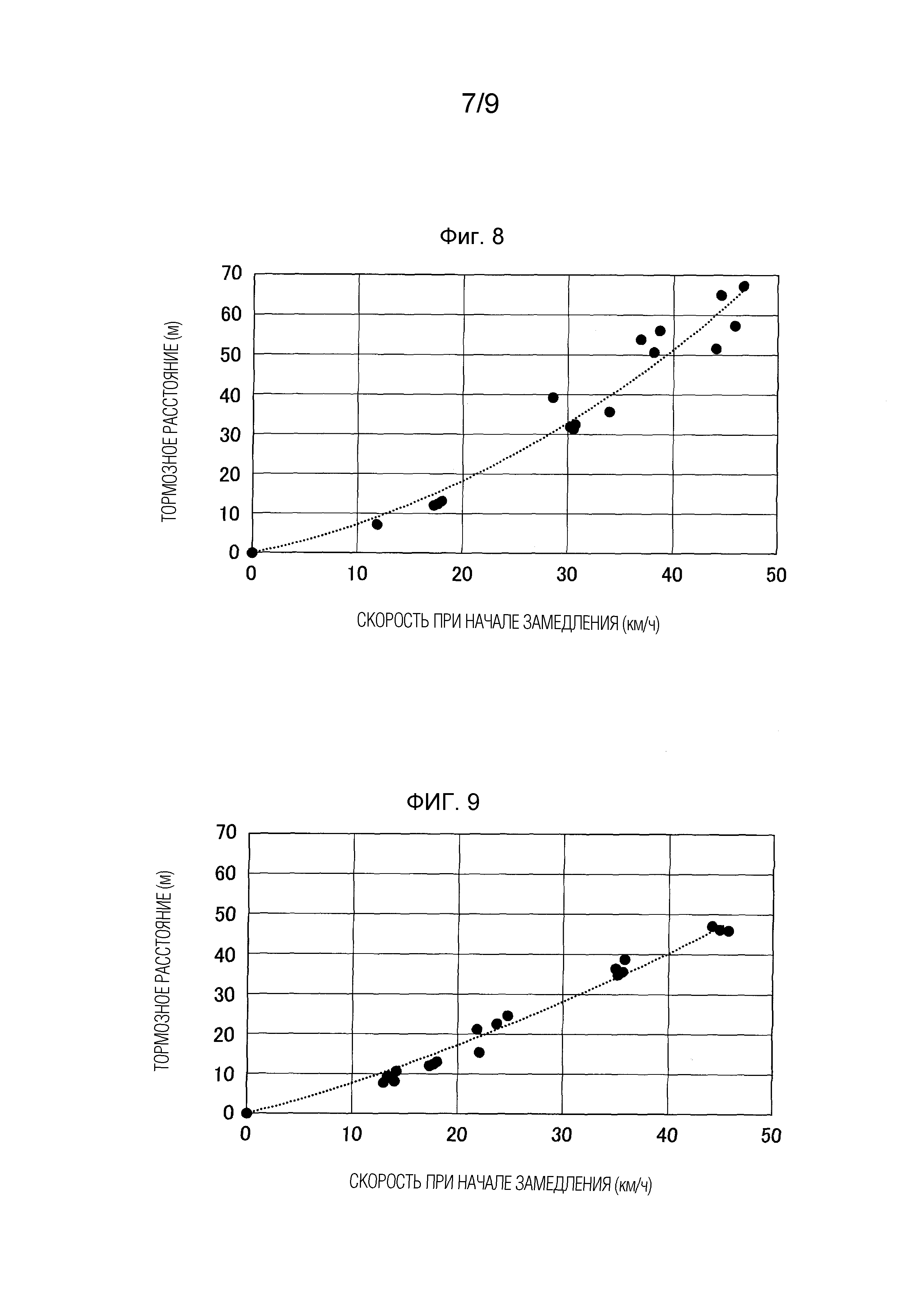
Фиг. 8 является схемой, которая иллюстрирует пример данных, которые указывают взаимосвязь скорости при начале замедления и тормозного расстояния для случая, в котором тип водителя должен начинать торможение таким образом, чтобы задавать средний темп замедления постоянным.
Фиг. 9 является схемой, которая иллюстрирует пример данных, которые указывают взаимосвязь скорости при начале замедления и тормозного расстояния для случая, в котором тип водителя должен начинать торможение таким образом, чтобы задавать TTI (время до перекрестка) постоянным.
Фиг. 10 является схемой для описания способа определения степени внимательности посредством обработки изучения характеристик движения согласно варианту осуществления настоящего изобретения.
Фиг. 11 является схемой для описания способа определения степени внимательности посредством обработки изучения характеристик движения согласно варианту осуществления настоящего изобретения.
Фиг. 12 является схемой для описания способа определения степени точности посредством обработки изучения характеристик движения согласно варианту осуществления настоящего изобретения.
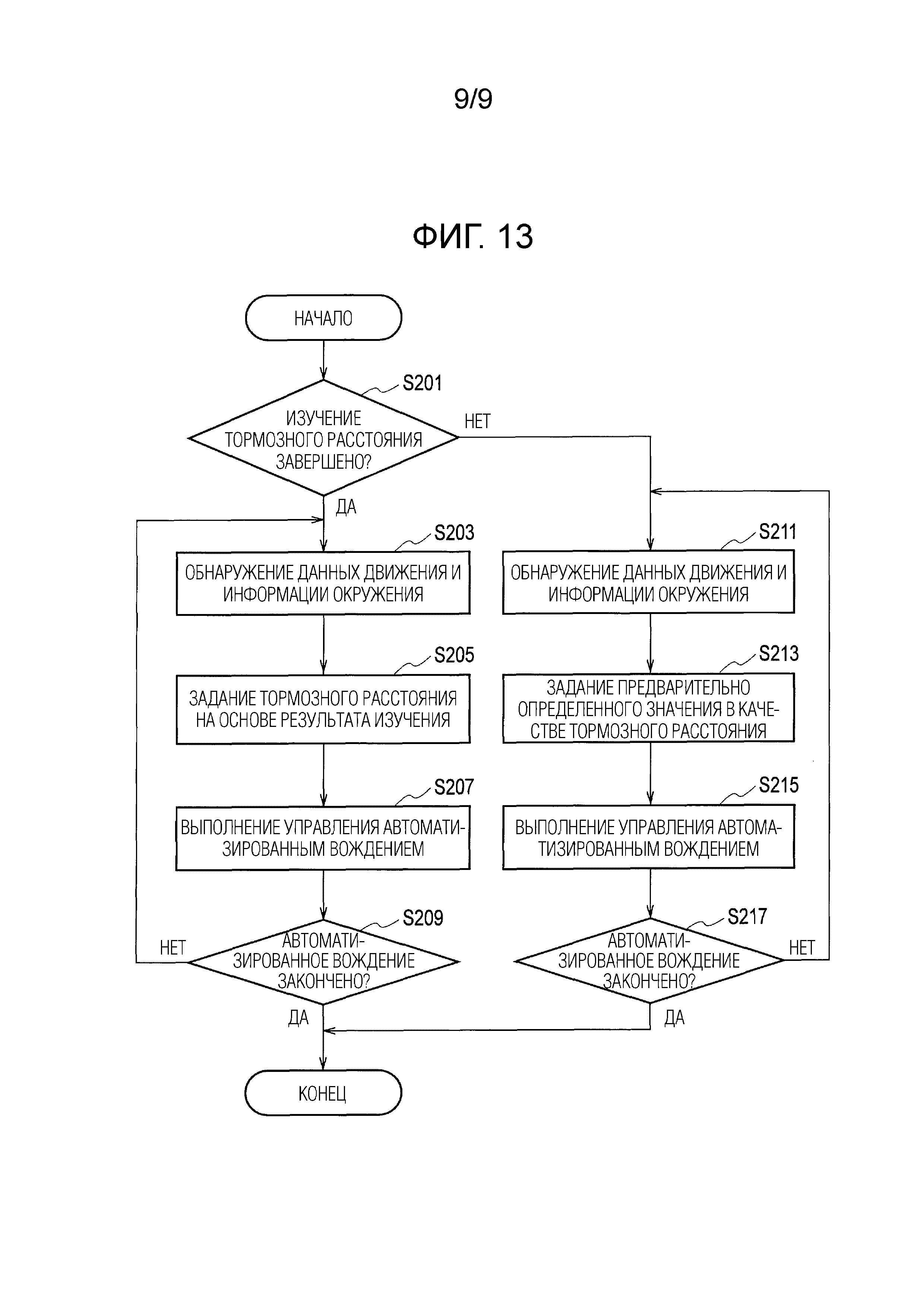
Фиг. 13 является блок-схемой последовательности операций способа, которая иллюстрирует процедуру обработки для обработки управления автоматизированным вождением посредством устройства управления вождением согласно варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] В дальнейшем в этом документе, описывается вариант осуществления, к которому применяется настоящее изобретение, со ссылкой на чертежи.
[0010] Конфигурация системы управления вождением
Фиг. 1 является блок-схемой, которая иллюстрирует конфигурацию системы управления вождением, включающей в себя устройство управления вождением согласно этому варианту осуществления. Как проиллюстрировано на фиг. 1, система 100 управления вождением согласно этому варианту осуществления включает в себя устройство 1 управления вождением, модуль 3 обнаружения состояния движения, модуль 5 обнаружения окружения движения, переключатель 7 для переключения режима вождения и модуль 9 представления состояния управления. Помимо этого, система 100 управления вождением соединяется с актуатором 11, смонтированным в транспортном средстве.
[0011] Устройство 1 управления вождением представляет собой контроллер в транспортном средстве, допускающем переключение между вождением вручную водителем и автоматизированным вождением, который изучает данные движения во время вождения вручную водителем и выполняет обработку применения результата изучения к характеристикам движения для автоматизированного вождения. В частности, устройство 1 управления вождением предпочтительно использует данные движения для случая отсутствия едущего впереди транспортного средства, движущегося впереди транспортного средства, чтобы выполнять обработку изучения характеристик движения для изучения тормозного расстояния для случая, в котором транспортное средство останавливается на перекрестке. В этой обработке изучения характеристик движения, данные движения для случая отсутствия едущего впереди транспортного средства выбираются из фрагментов данных движения во время вождения вручную, и выбранные данные движения для случая отсутствия едущего впереди транспортного средства используются для изучения. Таким образом, только данные движения для случая отсутствия едущего впереди транспортного средства используются для изучения. В этом случае, устройство 1 управления вождением включает в себя модуль 21 хранения данных для изучения, модуль 23 изучения характеристик движения и модуль 25 выполнения управления автоматизированным вождением.
[0012] В этом варианте осуществления, случай, в котором устройство 1 управления вождением монтируется в транспортном средстве; тем не менее, устройство связи может размещаться в транспортном средстве, и часть устройства 1 управления вождением может размещаться на внешнем сервере, чтобы выполнять обработку изучения характеристик движения. В случае, если устройство 1 управления вождением монтируется в транспортном средстве, можно изучать характеристики движения водителя, владеющего или использующего транспортное средство. Затем можно сохранять данные движения за предварительно определенный период времени (например, за один последний месяц) и отражать данные движения в автоматизированном вождении транспортного средства, принадлежащего или используемого водителем. С другой стороны, в случае, если устройство 1 управления вождением размещается на внешнем сервере, можно вычислять более стабильные результаты изучения, поскольку изучение может выполняться с использованием данных движения за длительный период времени самого водителя. Когда изучение еще не завершается, можно использовать данные движения других водителей и отражать средние характеристики движения водителей в области в автоматизированном вождении.
[0013] Модуль 3 обнаружения состояния движения обнаруживает данные движения, указывающие состояния движения транспортного средства, такие как скорость и темп ускорения транспортного средства, присутствие или отсутствие едущего впереди транспортного средства, текущее местоположение, состояние отображения указателя поворота, состояние свечения передних фар и рабочее состояние стеклоочистителей. Например, модуль 3 обнаружения состояния движения представляет собой бортовую сеть, такую как CAN (контроллерная сеть), навигационное устройство, лазерный радар, камеру и т.п. В частности, модуль 3 обнаружения состояния движения обнаруживает рабочие величины нажатия педали тормоза и педали акселератора транспортного средства и скорость и темп замедления транспортного средства в качестве данных для обнаружения начала замедления и остановки транспортного средства.
[0014] Модуль 5 обнаружения окружения движения обнаруживает информацию окружения, которая указывает окружение, в котором движется транспортное средство, такую как число полос движения, ограничение скорости, уклон дороги, кривизна дороги, состояние отображения сигнала светофора впереди транспортного средства, расстояние до перекрестка впереди транспортного средства, запланированный курс для перекрестка впереди транспортного средства и присутствие или отсутствие ограничения на временную остановку дороги, по которой движется транспортное средство. Например, модуль 5 обнаружения окружения движения представляет собой камеру, лазерный радар или навигационное устройство, смонтированное в транспортном средстве. Следует отметить, что состояние отображения сигнала светофора впереди транспортного средства и присутствие или отсутствие ограничения на временную остановку могут обнаруживаться посредством использования связи между транспортным средством и дорожной инфраструктурой. Запланированный курс для перекрестка впереди транспортного средства получается из навигационного устройства, состояния отображения указателя поворота и т.п. Помимо этого, освещенность, температура и погодные условия около транспортного средства получаются из датчика освещенности, датчика наружной температуры и переключателя стеклоочистителя, соответственно. Следует отметить, что освещенность может получаться из переключателя передних фар.
[0015] Переключатель 7 для переключения режима вождения представляет собой переключатель, который монтируется в транспортном средстве и задействуется пассажиром транспортного средства для переключения между автоматизированным вождением и вождением вручную. Например, переключатель 7 для переключения режима вождения представляет собой переключатель, размещаемый в механизме рулевого управления транспортного средства.
[0016] Модуль 9 представления состояния управления отображает то, представляет собой текущее состояние управления вождение вручную или автоматизированное вождение, на приборном панельном блоке, экране отображения навигационного устройства, дисплее на лобовом стекле и т.п. Помимо этого, модуль 9 представления состояния управления выводит звуки оповещения для указания начала и окончания автоматизированного вождения, а также указывает то, закончено или нет изучение в отношении характеристик движения.
[0017] Актуатор 11 принимает исполняемую команду из устройства 1 управления вождением и приводит в действие такие блоки, как акселератор, тормоз и механизм рулевого управления транспортного средства.
[0018] Далее описываются модули, формирующие устройство 1 управления вождением. Модуль 21 хранения данных для изучения получает данные движения по состоянию движения транспортного средства из модуля 3 обнаружения состояния движения и модуля 5 обнаружения окружения движения и информацию окружения относительно окружения движения около транспортного средства и сохраняет данные, требуемые для обработки изучения характеристик движения. В частности, модуль 21 хранения данных для изучения сохраняет данные движения для случая отсутствия едущего впереди транспортного средства, которые используется для изучения в отношении тормозного расстояния для случая остановки на перекрестке во время вождения вручную. В этом процессе, модуль 21 хранения данных для изучения сохраняет данные движения для случая отсутствия едущего впереди транспортного средства при их ассоциировании с состоянием движения и окружением движения транспортного средства. Сохраненные данные движения представляют собой такие данные, как скорость при начале замедления для случая, в котором транспортное средство останавливается на перекрестке, когда отсутствует едущее впереди транспортное средство, и тормозное расстояние для случая, в котором транспортное средство останавливается на перекрестке, когда отсутствует едущее впереди транспортное средство. Кроме того, модуль 21 хранения данных для изучения сохраняет такие данные, как рабочие величины нажатия педали тормоза и педали акселератора транспортного средства, скорость и темп замедления транспортного средства и расстояние до стоп-линии перекрестка. Модуль 21 хранения данных для изучения также сохраняет информацию окружения. Информация окружения представляет собой число полос движения, кривизну дороги, ограничение скорости, уклон дороги, присутствие или отсутствие ограничения на временную остановку либо состояние отображения сигнала светофора дороги, по которой движется транспортное средство, состояние отображения указателя поворота, погоду, температуру или освещенность около транспортного средства и т.д.
[0019] Модуль 23 изучения характеристик движения считывает данные движения, сохраненные в модуле 21 хранения данных для изучения, и изучает характеристики движения транспортного средства с учетом степени влияния от состояния движения и окружения движения. В частности, модуль 23 изучения характеристик движения предпочтительно использует данные движения для случая отсутствия едущего впереди транспортного средства, движущегося впереди транспортного средства, и изучает тормозное расстояние для случая остановки на перекрестке из характеристик движения транспортного средства. В этом процессе, модуль 23 изучения характеристик движения выбирает данные движения для случая отсутствия едущего впереди транспортного средства из фрагментов данных движения во время вождения вручную и использует выбранные данные движения для случая отсутствия едущего впереди транспортного средства для изучения. Таким образом, только данные движения для случая отсутствия едущего впереди транспортного средства используются для изучения тормозного расстояния для случая, в котором транспортное средство останавливается на перекрестке. Модуль 23 изучения характеристик движения выполняет изучение с учетом информации окружения относительно окружения, в котором движется транспортное средство, и выполняет изучение в каждой поездке транспортного средства. Помимо этого, стиль вождения водителя может определяться на основе результата изучения тормозного расстояния для случая остановки на перекрестке. Такой вычисленный результат изучения сохраняется в модуле 23 изучения характеристик движения по мере необходимости.
[0020] Модуль 25 выполнения управления автоматизированным вождением выполняет управление автоматизированным вождением при въезде в секцию автоматизированного вождения, либо когда водитель выбирает автоматизированное вождение с использованием переключателя 7 для переключения режима вождения. В этом процессе, модуль 25 выполнения управления автоматизированным вождением применяет результат изучения, изученный посредством модуля 23 изучения характеристик движения, к характеристикам движения для автоматизированного вождения. В частности, результат изучения тормозного расстояния для случая остановки на перекрестке применяется к тормозному расстоянию для автоматизированного вождения.
[0021] Следует отметить, что устройство 1 управления вождением сформировано из электронной схемы общего назначения, включающей в себя микрокомпьютер, микропроцессор и CPU и периферийное устройство, такое как запоминающее устройство. Устройство 1 управления вождением выполняет конкретную программу, чтобы работать в качестве вышеописанного модуля 21 хранения данных для изучения, модуля 23 изучения характеристик движения и модуля 25 выполнения управления автоматизированным вождением. Эти функции устройства 1 управления вождением могут реализовываться посредством одной или более схем обработки. Схемы обработки включают в себя, например, программируемое обрабатывающее устройство, такое как обрабатывающее устройство, включающее в себя электрическую схему, а также включают в себя устройство, такое как специализированная интегральная схема (ASIC), которая выполнена с возможностью выполнения функций, описанных в варианте осуществления, и традиционную схемную часть.
[0022] Процедура обработки изучения характеристик движения
Далее описывается процедура обработки изучения характеристик движения посредством устройства 1 управления вождением согласно этому варианту осуществления со ссылкой на блок-схему последовательности операций способа по фиг. 2. Обработка изучения характеристик движения, проиллюстрированная на фиг. 2, начинается, когда зажигание транспортного средства включается.
[0023] Как проиллюстрировано на фиг. 2, во-первых, на этапе S101, модуль 21 хранения данных для изучения определяет то, осуществляет или нет транспортное средство вождение вручную, на основе состояния переключателя 7 для переключения режима вождения. Когда транспортное средство осуществляет вождение вручную, процесс переходит к этапу S103, и когда транспортное средство осуществляет вождение автоматически, обработка изучения характеристик движения завершается, и управление автоматизированным вождением выполняется.
[0024] На этапе S103, модуль 21 хранения данных для изучения обнаруживает данные движения по состоянию движения транспортного средства и информацию окружения относительно окружения движения около транспортного средства из модуля 3 обнаружения состояния движения и модуля 5 обнаружения окружения движения. Скорость транспортного средства, угол поворота при рулении, темп ускорения, темп замедления, расстояние между транспортным средством и едущим впереди транспортным средством, относительная скорость между транспортным средством и едущим впереди транспортным средством, текущее местоположение, запланированный курс для перекрестка впереди транспортного средства, рабочие величины нажатия педали тормоза и педали акселератора, состояние свечения передних фар, рабочее состояние стеклоочистителей и т.д. обнаруживаются в качестве обнаруженных данных движения. Число полос движения, кривизна дороги, ограничение скорости, уклон дороги, присутствие или отсутствие ограничения на временную остановку либо состояние отображения сигнала светофора дороги, по которой движется транспортное средство, расстояние от транспортного средства до стоп-линии перекрестка, состояние отображения указателя поворота транспортного средства, погода, температура или освещенность около транспортного средства и т.д. обнаруживаются в качестве информации окружения.
[0025] На этапе S105, модуль 21 хранения данных для изучения определяет то, отсутствует или нет едущее впереди транспортное средство, движущееся впереди транспортного средства. В качестве способа определения того, отсутствует или нет едущее впереди транспортное средство, может определяться то, что отсутствует едущее впереди транспортное средство, не только тогда, когда едущее впереди транспортное средство не обнаруживается, но также и тогда, когда едущее впереди транспортное средство обнаруживается, но расстояние между транспортным средством и едущим впереди транспортным средством равно или выше предварительно определенного значения (например, 50 м). Когда определяется то, что отсутствует едущее впереди транспортное средство, процесс переходит к этапу S107, и когда определяется то, что имеется едущее впереди транспортное средство, процесс возвращается к этапу S103.
[0026] На этапе S107, модуль 21 хранения данных для изучения определяет то, соответствует или нет текущее состояние движения транспортного средства факторам исключения. Факторы исключения представляют собой указанные случаи, которые не являются подходящими для получения данных, используемых для изучения в отношении характеристики движения. Предусмотрено два фактора исключения: (A) максимальный темп замедления для случая, в котором транспортное средство останавливается на перекрестке, равен или выше предварительно определенного значения (например, 0,3 G); и (B) скорость при начале замедления для случая, в котором транспортное средство останавливается на перекрестке, равна или меньше предварительно определенного значения (например, 10 км/ч). Когда текущее состояние движения транспортного средства не соответствует этим факторам исключения, модуль 21 хранения данных для изучения обеспечивает возможность процессу переходить к этапу S109, и когда текущее состояние движения транспортного средства соответствует этим факторам исключения, процесс возвращается к этапу S103.
[0027] Как описано выше, применение фактора (A) исключения позволяет исключать данные для случая неожиданного внезапного торможения, и применение фактора (B) исключения позволяет исключать данные, например, для чрезвычайно низкой скорости после съезда при медленном движении. Таким образом, задание этих факторов (A) и (B) исключения позволяет получать данные движения для случая нормального состояния замедления. Следует отметить, что эти факторы исключения не обязательно применяются, и может возникать случай неприменения этих факторов исключения в зависимости от ситуации.
[0028] На этапе S109, модуль 21 хранения данных для изучения сохраняет данные движения и информацию окружения, которые обнаруживаются на этапе S103 и выбираются посредством обработки на этапах S105 и 107, в качестве данных для изучения. Следует отметить, что хотя в этом варианте осуществления описывается случай сохранения данных, которые выбираются заранее, данные могут выбираться посредством выполнения обработки вышеописанных этапов S105 и 107 после однократного сохранения всех фрагментов данных во время вождения вручную.
[0029] Теперь, пример данных для изучения, которое сохраняется в модуле 21 хранения данных для изучения, проиллюстрирован на фиг. 3. Как проиллюстрировано на фиг. 3, тормозное расстояние Db, скорость Vb при начале замедления, данные x1-x6 сохраняются в качестве данных для изучения. Тормозное расстояние Db представляет собой тормозное расстояние для случая, в котором транспортное средство останавливается на перекрестке, когда отсутствует едущее впереди транспортное средство, и не представляет собой проезжаемое расстояние от момента t1 времени, в который начинается замедление, до момента времени, в который скорость становится нулевой, как проиллюстрировано на фиг. 4. Скорость Vb при начале замедления представляет собой скорость при начале замедления для случая, в котором транспортное средство останавливается на перекрестке, когда отсутствует едущее впереди транспортное средство. Как проиллюстрировано на фиг. 4, замедление начинается в момент t1 времени, в который темп ускорения транспортного средства становится равным или меньшим -0,1 G (темп замедления становится равным или превышающим 0,1 G) после того, как тормозной переключатель включается посредством начала торможения, и скорость в момент t1 времени задается как скорость Vb при начале замедления. Если начало замедления задается равным моменту t1 времени, в который темп ускорения становится равным или меньшим предварительно определенного значения, как описано выше, можно исключать реакционное расстояние и извлекать время начала замедления, которое соответствует намерению водителя. Темп ускорения может получаться посредством фильтрации выходного значения датчика темпа ускорения или может получаться на основе производного значения скорости. Помимо этого, точка перегиба скорости может задаваться в качестве точки начала замедления посредством аппроксимации скорости посредством сигмоидальной функции или логистической функции.
[0030] x1-x6 представляют собой фрагменты данных, которые задаются на основе информации окружения, и задаются равными значению 0 или 1 в соответствии со способом задания, проиллюстрированным на фиг. 5. Например, после того, как получаются данные тормозного расстояния Db и скорости Vb при начале замедления, проиллюстрированные на фиг. 3, x1 задается равным 1, когда кривизна дороги, по которой движется транспортное средство, равна или выше предварительно определенного значения, и x1 задается равным 0, когда кривизна меньше предварительно определенного значения. Ограничение скорости может применяться вместо кривизны дороги. Например, x1 задается равным 1, когда ограничение скорости дороги, по которой движется транспортное средство, равно или выше предварительно определенного значения (40 или 50 км/ч), и x1 задается равным 0, когда ограничение скорости меньше предварительно определенного значения.
[0031] Помимо этого, x2 задается равным 1, когда транспортное средство движется на спуске, и задается равным 0 для других случаев (для ровной дороги и подъема), и x3 задается равным 1, когда сигнал светофора впереди транспортного средства представляет собой красный свет, и задается равным 0 для других случаев (для зеленого света или отсутствия сигнала светофора). Следует отметить, что красный свет может включать в себя желтый свет; x4 задается равным 1 ночью и задается равным 0 для других случаев. Определение в отношении того, ночь сейчас или нет, может выполняться на основе состояния свечения передних фар. Помимо этого, x5 задается равным 1, когда погода около транспортного средства является плохой погодой, и задается равным 0, когда она не является плохой погодой. Для определения в отношении того, плохая сейчас погода или нет, определяется то, что сейчас не плохая погода, когда стеклоочистители транспортного средства деактивированы или работают прерывисто, и определяется то, что сейчас плохая погода, когда стеклоочистители транспортного средства активируются. В этом процессе, могут добавляться такие условия, как температура и освещенность. Для случая применения температуры в качестве условия, x5 задается равным 1, когда температура, измеряемая посредством датчика наружной температуры, является минусовой, и задается равным 0, когда температура, измеряемая посредством датчика наружной температуры, является плюсовой. Это позволяет реагировать на различные характеристики обледенелых дорог. Для случая применения освещенности в качестве условия, x5 задается равным 1, когда датчик освещенности обнаруживает то, что сейчас светло, и задается равным 0, когда датчик освещенности обнаруживает то, что сейчас темно. Задание может выполняться на основе того, светятся или нет передние фары, а не на основе датчика освещенности; x6 задается равным 1, когда указатель поворота включен для поворота транспортного средства направо или налево, и задается равным 0, когда указатель поворота отключен.
[0032] Следует отметить, что хотя на фиг. 5 описывается случай классификации данных на два уровня 0 и 1, данные могут классифицироваться на 3 или более уровней. Как описано выше, в данных для изучения, проиллюстрированных на фиг. 3, информация окружения x1-x6 ассоциирована с данными движения в виде тормозного расстояния Db и скорости Vb при начале замедления. Таким образом, в этом варианте осуществления, характеристики движения изучаются посредством использования данных движения в виде тормозного расстояния Db и скорости Vb при начале замедления, и дополнительно, характеристики движения изучаются при ассоциировании окружения, в котором движется транспортное средство, с тормозным расстоянием.
[0033] Поскольку данные, сохраненные в качестве данных для изучения, выбираются посредством обработки на вышеописанных этапах S105 и 107, варьирование данных уменьшается. Фиг. 6 иллюстрирует пример данных, которые указывают взаимосвязь скорости при начале замедления и тормозного расстояния для случая отсутствия едущего впереди транспортного средства. С другой стороны, фиг. 7 иллюстрирует пример данных, которые указывают взаимосвязь скорости при начале замедления и тормозного расстояния не только для случая невыполнения обработки на этапе S105 или для случая отсутствия едущего впереди транспортного средства, но также и для случая, в котором имеется едущее впереди транспортное средство. Как видно из фиг. 7, когда выбранные данные не ограничены данными для случая отсутствия едущего впереди транспортного средства, данные варьируются широко, поскольку водитель зависит от замедления едущего впереди транспортного средства. Таким образом, точность изучения не может повышаться посредством изучения взаимосвязи скорости при начале замедления и тормозного расстояния в этом случае. Напротив, когда выбранные данные ограничены данными для случая отсутствия едущего впереди транспортного средства, варьирование данных уменьшается, как проиллюстрировано на фиг. 6, поскольку водитель тормозит независимо от едущего впереди транспортного средства. Таким образом, когда выбранные данные ограничены данными для случая отсутствия едущего впереди транспортного средства, можно точно изучать тормозное расстояние, которое основано на ощущении водителя, и повышать точность изучения.
[0034] На этапе S111, модуль 21 хранения данных для изучения определяет то, сохраняется или нет предварительно определенный объем данных для изучения, и когда объем не достигает предварительно определенного объема, процесс возвращается к этапу S103, и когда данные для изучения накапливаются таким образом, что они равны или выше предварительно определенного объема, процесс переходит к этапу S113.
[0035] На этапе S113, модуль 23 изучения характеристик движения изучает характеристики движения транспортного средства. В частности, модуль 23 изучения характеристик движения использует данные движения для случая отсутствия едущего впереди транспортного средства, движущегося впереди транспортного средства, чтобы изучать тормозное расстояние для случая, в котором транспортное средство останавливается на перекрестке, из характеристик движения. При изучении тормозного расстояния, например, изучение выполняется посредством создания множественной регрессионной модели, выражаемой посредством следующего уравнения (1), с использованием наборов данных, проиллюстрированных на фиг. 3:
Математическое выражение 1
Db=(c0+c1x1+c2x2+c3x3+c4x4+c5x5+c6x6)Vb2+dVb (1), где:
Vb представляет собой скорость при начале замедления, Db представляет собой тормозное расстояние, вычисленное на основе модели, x1-x6 представляют собой факторы окружения, и c0-c6 и d представляют собой коэффициенты, полученные из изучения. Множественная регрессионная модель, выражаемая посредством вышеуказанного уравнения (1), указывает то, что тормозное расстояние для случая, в котором транспортное средство останавливается на перекрестке, варьируется в зависимости от факторов окружения.
[0036] Множественная регрессионная модель, выражаемая посредством уравнения (1), может реагировать на различные типы поведения при начале замедления. Как указано ниже, уравнение (1) может выражаться как уравнение (2), и уравнение (3) может выражаться на основе уравнения (1) и уравнения (2):
Математическое выражение 2
Db=Vb2/2a+dVb (2); и
Математическое выражение 3
a=1/2 (c0+c1x1+c2x2+c3x3+c4x4+c5x5+c6x6) (3), где:
в уравнениях (2) и (3), a представляет собой средний темп замедления (м/с2), и в уравнениях (1) и (2), d представляет собой TTI (время до перекрестка: время достижения перекрестка для случая с таким предположением, что транспортное средство перемещается со скоростью, идентичной скорости в начале торможения).
[0037] Тип поведения при начале замедления отличается в зависимости от водителей; например, имеется тип, который начинает торможение таким образом, чтобы задавать средний темп замедления практически постоянным независимо от скорости, как проиллюстрировано на фиг. 8, и тип, который начинает торможение таким образом, чтобы задавать TTI практически постоянным (т.е. таким образом, чтобы задавать темп замедления выше по мере того, как скорость является более высокой), как проиллюстрировано на фиг. 9. Первый тип имеет больший коэффициент Vb2, и второй тип имеет больший коэффициент Vb в уравнении (1). Первый тип имеет тенденцию иметь более низкий средний темп замедления и большее тормозное расстояние, чем второй тип. Следует отметить, что фиг. 8 и 9 показывают экстремальный пример, и также может быть предусмотрен водитель, который действует согласно среднему поведению. Множественная регрессионная модель уравнения (1) представляет собой модель, которая может реагировать на факторы окружения и различные типы индивидуальных поведений по замедлению с использованием коэффициентов Vb2 и Vb.
[0038] Из коэффициентов в уравнении (1), c0 и d представляют собой опорные значения, которые задаются для индивидуальных водителей, как проиллюстрировано на фиг. 5; c0 представляет собой среднее значение темпа замедления значений для случая, в котором x1-x6 равны 0, и d представляет собой степень зависимости от TTI (т.е. степень изменения темпа замедления согласно скорости); d становится значением ближе к 1 по мере того, как зависимость от TTI является более высокой.
[0039] Модуль 23 изучения характеристик движения выполняет множественный регрессионный анализ с использованием данных для изучения, проиллюстрированных на фиг. 3, чтобы вычислять коэффициенты c0-c6 в уравнении (1). Поскольку данные для изучения, используемые в этом процессе, представляют собой только данные движения для случая отсутствия едущего впереди транспортного средства, как проиллюстрировано на фиг. 6, варьирование уменьшается. Как результат, тормозное расстояние Db для случая остановки на перекрестке, вычисленное из уравнения (1), формируется в квадратичной кривой F на фиг. 6. Как описано выше, в этом варианте осуществления, тормозное расстояние для случая остановки на перекрестке изучается с квадратичной кривой с использованием только данных движения для случая отсутствия едущего впереди транспортного средства. Это позволяет точно изучать тормозное расстояние, которое основано на ощущении водителя.
[0040] Как выражается посредством уравнения (1), в этом варианте осуществления, можно выполнять изучение с учетом информации окружения относительно окружения, в котором движется транспортное средство, посредством использования членов c1x1-c6x6. Таким образом, можно корректировать тормозное расстояние на основе информации окружения. Члены c1x1-c6x6 в этом варианте осуществления представляют собой коэффициент Vb2; тем не менее, они могут представлять собой коэффициент Vb.
[0041] Следует отметить, что в качестве данных для изучения, могут использоваться данные нескольких поездок, либо могут использоваться данные только одной поездки. Когда достаточный объем данных по факторам окружения не может получаться только из одной поездки, коэффициенты факторов окружения могут вычисляться с использованием данных для изучения в отношении нескольких поездок, и коэффициент c0 в качестве опорного может вычисляться с использованием данных для изучения в поездке. В этом случае, можно предоставлять естественный результат изучения, даже когда поездка в этот день имеет тенденцию выполняться более осторожно или имеет тенденцию проводиться в большей спешке, чем поездки в другие дни.
[0042] Тормозное расстояние может иметь различные характеристики в соответствующих поездках. Например, когда имеется попутчик или нагрузка, вождение может стараться учитывать попутчика или нагрузку, и тормозное расстояние может быть большим посредством уменьшения темпа замедления. Когда водитель спешит в пункт назначения, вождение имеет тенденцию быть активным, и тормозное расстояние может быть меньшим, чтобы предоставлять возможность высокого темпа замедления. Как это, допустимый темп замедления и тормозное расстояние могут отличаться в зависимости от ощущений и условий во время вождения. Если множественный регрессионный анализ выполняется в каждой поездке, можно получать характеристики тормозного расстояния соответствующих поездок. Помимо этого, если тормозное расстояние для автоматизированного вождения управляется с характеристиками тормозного расстояния, изученными из соответствующих поездок, можно предоставлять управление автоматизированным вождением, которое соответствует ощущениям водителя и условиям во время поездки.
[0043] Когда дорога, по которой движется транспортное средство, имеет закругление, x1 в уравнении (1) задается равным 1, и в силу этого тормозное расстояние Db в уравнении (1) становится большим значением, чем тормозное расстояние Db для случая, в котором дорога не имеет закругления. Таким образом, когда дорога, по которой движется транспортное средство, имеет закругление, тормозное расстояние Db корректируется таким образом, что оно превышает тормозное расстояние Db для случая, в котором дорога не имеет закругления. Случай более высокого ограничения скорости может использоваться вместо случая искривленной дороги. Когда ограничение скорости дороги, по которой движется транспортное средство, равно или выше предварительно определенного значения, тормозное расстояние Db корректируется таким образом, что оно превышает тормозное расстояние Db для случая, в котором ограничение скорости меньше предварительно определенного значения.
[0044] Аналогично, когда транспортное средство движется на спуске, x2 в уравнении (1) задается равным 1, и в силу этого тормозное расстояние Db в уравнении (1) становится большим значением, чем тормозное расстояние Db для случая движения на подъеме. Таким образом, когда транспортное средство движется на спуске, тормозное расстояние Db корректируется таким образом, что оно превышает тормозное расстояние Db для случая движения на подъеме.
[0045] Когда сигнал светофора впереди транспортного средства представляет собой красный свет, x3 в уравнении (1) задается равным 1, и в силу этого тормозное расстояние Db в уравнении (1) становится большим значением, чем тормозное расстояние Db для случая, в котором сигнал светофора отличается от красного света. Таким образом, когда сигнал светофора впереди транспортного средства представляет собой красный свет, тормозное расстояние Db корректируется таким образом, что оно превышает тормозное расстояние Db для случая, в котором сигнал светофора отличается от красного света.
[0046] Помимо этого, когда транспортное средство движется ночью, x4 в уравнении (1) задается равным 1, и в силу этого тормозное расстояние Db в уравнении (1) становится большим значением, чем тормозное расстояние Db для случая не в ночное время. Таким образом, когда транспортное средство движется ночью, тормозное расстояние Db корректируется таким образом, что оно превышает тормозное расстояние Db для случая времени, отличного от ночи.
[0047] Когда погода около транспортного средства является плохой погодой, x5 в уравнении (1) задается равной 1, и в силу этого тормозное расстояние Db в уравнении (1) становится большим значением, чем тормозное расстояние Db для случая, в котором погода отличается от плохой погоды. Таким образом, когда погода около транспортного средства является плохой погодой, тормозное расстояние Db корректируется таким образом, что оно превышает тормозное расстояние Db для случая отсутствия плохой погоды.
[0048] Помимо этого, когда указатель поворота включен, и транспортное средство поворачивает направо или налево, x6 в уравнении (1) задается равным 1, и в силу этого тормозное расстояние Db в уравнении (1) становится большим значением, чем тормозное расстояние Db для случая, в котором указатель поворота отключен, и транспортное средство не поворачивает направо или налево. Таким образом, когда транспортное средство поворачивает направо или налево, тормозное расстояние Db может корректироваться таким образом, что оно превышает тормозное расстояние Db для случая не поворота направо или налево.
[0049] В дополнение к вышеописанному изучению в отношении характеристик движения, модуль 23 изучения характеристик движения может определять стиль вождения водителя на основе результата изучения тормозного расстояния. Характеристики тормозного расстояния могут указывать тенденцию, которая соответствует стилю вождения индивидуального водителя. Например, коэффициент c0 для Vb2 в уравнении (1) отражает степень внимательности водителя, и степень внимательности становится более высокой по мере того, как значение c0 является более высоким, как проиллюстрировано на фиг. 10. Таким образом, поскольку средний темп замедления является низким, и тормозное расстояние является большим, когда водитель имеет большее c0 (степень внимательности больше), замедление начинается раньше для перекрестка, и можно определять то, что водитель является внимательным. Фиг. 10 иллюстрирует то, что чем больше коэффициент c0, тем больше степень внимательности.
[0050] Поскольку коэффициент d Vb имеет тенденцию быть меньшим по мере того, как c0 больше, может определяться то, что чем меньше значение d, тем больше степень внимательности, как проиллюстрировано на фиг. 11. Также можно определять степень точности водителя посредством использования коэффициента R2 определения множественной регрессионной модели, как проиллюстрировано на фиг. 12. Коэффициент определения является значением, которое указывает степень подгонки к множественной регрессионной модели, и варьирование данных меньше, и данные подгоняются к модели в большей степени по мере того, как коэффициент определения составляет ближе 1. Таким образом, можно считать, что тормозное расстояние всегда является постоянным по мере того, как коэффициент определения больше, и можно определять то, что водитель является точным человеком. Индивидуальный стиль вождения, определенный таким образом, может предоставляться самому водителю либо может предоставляться в качестве информации водителю или диспетчеру посредством сравнения определенного стиля вождения со стилем вождения других водителей с использованием внешнего сервера и определения того, насколько водитель является точным из числа всех водителей.
[0051] На этапе S115, модуль 23 изучения характеристик движения сохраняет коэффициенты c0-c6 в вычисленном уравнении (1) в качестве результата изучения и завершает обработку изучения характеристик движения согласно этому варианту осуществления.
[0052] Процедура обработки управления автоматизированным вождением
Далее описывается процедура обработки управления автоматизированным вождением посредством устройства 1 управления вождением согласно этому варианту осуществления со ссылкой на блок-схему последовательности операций способа по фиг. 13.
[0053] Как проиллюстрировано на фиг. 13, на этапе S201, модуль 25 выполнения управления автоматизированным вождением определяет то, завершается или нет изучение в отношении тормозного расстояния для случая остановки на перекрестке, посредством обработки изучения характеристик движения, проиллюстрированной на фиг. 2. Когда изучение завершается, процесс переходит к этапу S203, и когда изучение не завершается, процесс переходит к этапу S211.
[0054] Во-первых, описывается случай, в котором изучение в отношении тормозного расстояния завершается. На этапе S203, модуль 25 выполнения управления автоматизированным вождением обнаруживает данные движения по состоянию движения транспортного средства и информацию окружения относительно окружения движения около транспортного средства из модуля 3 обнаружения состояния движения и модуля 5 обнаружения окружения движения.
[0055] На этапе S205, модуль 25 выполнения управления автоматизированным вождением задает тормозное расстояние для случая остановки на перекрестке на основе результата изучения. В частности, модуль 25 выполнения управления автоматизированным вождением задает коэффициенты c0-c6 в качестве результата изучения в уравнениях (1) и (2) и вычисляет тормозное расстояние Db для случая остановки на перекрестке посредством ввода определенной скорости при начале замедления в уравнение (1). Модуль 25 выполнения управления автоматизированным вождением затем задает вычисленное тормозное расстояние Db в качестве тормозного расстояния, которое применяется к автоматизированному вождению. Таким образом, модуль 25 выполнения управления автоматизированным вождением применяет результат изучения тормозного расстояния в качестве тормозного расстояния для автоматизированного вождения.
[0056] На этапе S207, модуль 25 выполнения управления автоматизированным вождением выполняет управление автоматизированным вождением с использованием заданного тормозного расстояния. В частности, модуль 25 выполнения управления автоматизированным вождением передает исполняемую команду управления в актуатор 11 и выполняет операции с акселератором, тормозом, механизмом рулевого управления и т.п., которые требуются для автоматизированного вождения.
[0057] На этапе S209, модуль 25 выполнения управления автоматизированным вождением определяет то, закончено или нет автоматизированное вождение, и когда автоматизированное вождение еще не закончено, процесс возвращается к этапу S203, чтобы продолжать автоматизированное вождение. С другой стороны, когда автоматизированное вождение переключается на вождение вручную, и автоматизированное вождение закончено, обработка управления автоматизированным вождением согласно этому варианту осуществления завершается.
[0058] Далее описывается случай, в котором изучение в отношении тормозного расстояния не завершается. На этапе S211, модуль 25 выполнения управления автоматизированным вождением обнаруживает данные движения по состоянию движения транспортного средства и информацию окружения относительно окружения движения около транспортного средства из модуля 3 обнаружения состояния движения и модуля 5 обнаружения окружения движения.
[0059] На этапе S213, модуль 25 выполнения управления автоматизированным вождением задает тормозное расстояние для случая остановки на перекрестке равным предварительно определенному значению, которое задается заранее. Общее значение или среднее значение тормозного расстояния может использоваться в качестве этого предварительно определенного значения.
[0060] На этапе S215, модуль 25 выполнения управления автоматизированным вождением выполняет управление автоматизированным вождением с использованием заданного тормозного расстояния. В частности, модуль 25 выполнения управления автоматизированным вождением передает исполняемую команду управления в актуатор 11 и выполняет операции с акселератором, тормозом, механизмом рулевого управления и т.п., которые требуются для автоматизированного вождения.
[0061] На этапе S217, модуль 25 выполнения управления автоматизированным вождением определяет то, закончено или нет автоматизированное вождение, и когда автоматизированное вождение еще не закончено, процесс возвращается к этапу S211, чтобы продолжать автоматизированное вождение. С другой стороны, когда автоматизированное вождение переключается на вождение вручную, и автоматизированное вождение закончено, обработка управления автоматизированным вождением согласно этому варианту осуществления завершается.
[0062] Преимущества варианта осуществления
Как подробно описано выше, способ помощи при движении согласно этому варианту осуществления служит для транспортного средства, допускающего переключение между вождением вручную водителем и автоматизированным вождением, в котором предпочтительно изучается тормозное расстояние для случая отсутствия едущего впереди транспортного средства, находящегося впереди транспортного средства. Это предотвращает изучение в отношении тормозного расстояния в ситуации, в которой водитель зависит от замедления едущего впереди транспортного средства, и в силу этого можно точно изучать тормозное расстояние, которое основано на ощущении водителя.
[0063] В способе помощи при движении согласно этому варианту осуществления, изучается только тормозное расстояние для случая отсутствия едущего впереди транспортного средства, находящегося впереди транспортного средства. Это обеспечивает изучение в отношении тормозного расстояния при одновременном исключении ситуации, когда водитель зависит от замедления едущего впереди транспортного средства, и в силу этого можно точно изучать тормозное расстояние, которое основано на ощущении водителя.
[0064] Помимо этого, в способе помощи при движении согласно этому варианту осуществления, изучение выполняется с использованием скорости при начале замедления для случая, в котором транспортное средство останавливается на перекрестке, когда отсутствует едущее впереди транспортное средство, и тормозного расстояния для случая, в котором транспортное средство останавливается на перекрестке, когда отсутствует едущее впереди транспортное средство. Это предотвращает использование данных движения по ситуации, когда водитель зависит от замедления едущего впереди транспортного средства, и в силу этого можно точно изучать тормозное расстояние, которое основано на ощущении водителя.
[0065] В способе помощи при движении согласно этому варианту осуществления, взаимосвязь скорости при начале замедления для случая, в котором транспортное средство останавливается на перекрестке, когда отсутствует едущее впереди транспортное средство, и тормозного расстояния для случая, в котором транспортное средство останавливается на перекрестке, когда отсутствует едущее впереди транспортное средство, моделируется в квадратичной кривой. Это предоставляет точное понимание взаимосвязи скорости при начале замедления и тормозного расстояния, и в силу этого можно точно изучать тормозное расстояние, которое основано на ощущении водителя.
[0066] В способе помощи при движении согласно этому варианту осуществления, начало замедления транспортного средства обнаруживается, по меньшей мере, из одного из операции нажатия педали тормоза, операции нажатия педали акселератора и темпа замедления транспортного средства. Это позволяет точно получать данные движения по началу замедления водителем. В частности, поскольку операция замедления для нажатия педали тормоза является очевидной, можно получать данные движения, которые имеют наименьше варьирование. Когда получаются данные движения по не нажатию педали акселератора, можно получать данные, которые дополнительно включают в себя данные по поведению при подготовке к замедлению. Помимо этого, когда определяется то, что замедление начинается, когда темп замедления становится равным или меньшим предварительно определенного значения, можно обнаруживать операции замедления для любых случаев.
[0067] Помимо этого, в способе помощи при движении согласно этому варианту осуществления, остановка транспортного средства обнаруживается, когда скорость транспортного средства становится равной или меньшей предварительно определенного значения. Это обеспечивает надежное обнаружение остановки транспортного средства, и можно точно изучать тормозное расстояние.
[0068] В способе помощи при движении согласно этому варианту осуществления, расстояние от начала замедления транспортного средства до стоп-линии перекрестка представляет собой тормозное расстояние. Это позволяет получать тормозное расстояние независимо от местоположения, в котором транспортное средство фактически останавливается.
[0069] Помимо этого, в способе помощи при движении согласно этому варианту осуществления, определяется то, что отсутствует едущее впереди транспортное средство, когда едущее впереди транспортное средство не обнаруживается, и когда расстояние между транспортным средством и едущим впереди транспортным средством равно или выше предварительно определенного значения. Это позволяет надежно получать данные движения для случая отсутствия едущего впереди транспортного средства.
[0070] В способе помощи при движении согласно этому варианту осуществления, тормозное расстояние, которое задает максимальный темп замедления равным или выше предварительно определенного значения в случае, если транспортное средство останавливается на перекрестке, не используется. Это обеспечивает исключение данных движения для случая неожиданного внезапного торможения, и в силу этого можно выполнять точное изучение с использованием данных движения для стабильной ситуации.
[0071] Помимо этого, в способе помощи при движении согласно этому варианту осуществления, тормозное расстояние, которое задает скорость при начале замедления равной или ниже предварительно определенного значения в случае, если транспортное средство останавливается на перекрестке, не используется. Это обеспечивает исключение данных движения, например, для чрезвычайно низкой скорости после съезда при медленном движении, и в силу этого можно выполнять точное изучение с использованием данных движения для стабильной ситуации.
[0072] В способе помощи при движении согласно этому варианту осуществления, изучение выполняется при ассоциировании окружения, в котором движется транспортное средство, с тормозным расстоянием. Тормозное расстояние для случая остановки на перекрестке имеет различные характеристики в зависимости от окружающих условий. Таким образом, можно изучать тормозное расстояние, отражающее условия окружения, посредством выполнения множественного регрессионного анализа с учетом окружения, в котором движется транспортное средство.
[0073] Помимо этого, в способе помощи при движении согласно этому варианту осуществления, число полос движения, кривизна дороги, ограничение скорости, уклон дороги и присутствие или отсутствие ограничения на временную остановку или состояние отображения сигнала светофора дороги, по которой движется транспортное средство, используются в качестве окружения, в котором движется транспортное средство. Кроме того, используется состояние отображения указателя поворота транспортного средства и погода, температура или освещенность около транспортного средства. Это позволяет изучать тормозное расстояние, индивидуально и конкретно отражающее различные условия окружения.
[0074] В способе помощи при движении согласно этому варианту осуществления, когда результат изучения применяется к характеристикам движения для автоматизированного вождения, определяется то, движется или нет транспортное средство на спуске, и когда транспортное средство движется на спуске, характеристики движения задаются таким образом, что тормозное расстояние становится большим тормозного расстояния для случая движения на подъеме. Это обеспечивает повышение безопасности на спуске, на котором торможение является затруднительным, и в силу этого можно предоставлять водителю ощущение безопасности.
[0075] Помимо этого, в способе помощи при движении согласно этому варианту осуществления, когда результат изучения применяется к характеристикам движения для автоматизированного вождения, определяется то, поворачивает транспортное средство направо или налево либо нет, и когда транспортное средство поворачивает направо или налево, характеристики движения задаются таким образом, что тормозное расстояние становится большим тормозного расстояния для случая невыполнения поворота направо или налево. Это обеспечивает повышение безопасности при повороте направо или налево, и в силу этого можно предоставлять водителю ощущение безопасности.
[0076] В способе помощи при движении согласно этому варианту осуществления, когда результат изучения применяется к характеристикам движения для автоматизированного вождения, определяется то, представляет собой сигнал светофора впереди транспортного средства или нет красный свет, и когда сигнал светофора впереди транспортного средства представляет собой красный свет, характеристики движения задаются таким образом, что тормозное расстояние становится большим тормозного расстояния для случая, в котором сигнал светофора отличается от красного света. Это обеспечивает повышение безопасности, когда сигнал светофора представляет собой красный свет, и транспортное средство должно останавливаться, и в силу этого можно предоставлять водителю ощущение безопасности.
[0077] Помимо этого, в способе помощи при движении согласно этому варианту осуществления, когда результат изучения применяется к характеристикам движения для автоматизированного вождения, определяется то, имеет закругление или нет дорога, по которой движется транспортное средство, и когда дорога, по которой движется транспортное средство, имеет закругление, характеристики движения задаются таким образом, что тормозное расстояние становится большим тормозного расстояния для случая, в котором дорога не имеет закругления. Это обеспечивает повышение безопасности на искривленной дороге с плохой видимостью, и в силу этого можно предоставлять водителю ощущение безопасности.
[0078] В способе помощи при движении согласно этому варианту осуществления, когда результат изучения применяется к характеристикам движения для автоматизированного вождения, определяется то, движется транспортное средство ночью или нет, и когда транспортное средство движется ночью, характеристики движения задаются таким образом, что тормозное расстояние становится большим тормозного расстояния для случая не в ночное время. Это обеспечивает повышение безопасности темной ночью с плохой видимостью, и в силу этого можно предоставлять водителю ощущение безопасности.
[0079] Помимо этого, в способе помощи при движении согласно этому варианту осуществления, когда результат изучения применяется к характеристикам движения для автоматизированного вождения, определяется то, является или нет погода около транспортного средства плохой погодой, и когда погода около транспортного средства является плохой погодой, характеристики движения задаются таким образом, что тормозное расстояние становится большим тормозного расстояния для случая отсутствия плохой погоды. Это обеспечивает повышение безопасности, когда около транспортного средства плохая погода, и в силу этого можно предоставлять водителю ощущение безопасности.
[0080] В способе помощи при движении согласно этому варианту осуществления, когда результат изучения применяется к характеристикам движения для автоматизированного вождения, определяется то, равно или выше либо нет ограничение скорости дороги, по которой движется транспортное средство, предварительно определенного значения, и когда ограничение скорости дороги, по которой движется транспортное средство, равно или выше предварительно определенного значения, характеристики движения задаются таким образом, что тормозное расстояние становится большим тормозного расстояния для случая, в котором ограничение скорости меньше предварительно определенного значения. Это обеспечивает повышение безопасности на дороге, н которой скорость транспортного средства становится высокой, и в силу этого можно предоставлять водителю ощущение безопасности.
[0081] Помимо этого, в способе помощи при движении согласно этому варианту осуществления, стиль вождения водителя определяется на основе результата изучения тормозного расстояния. Это обеспечивает получение качественной тенденции водителя, и в силу этого можно повышать уровень безопасности посредством обращения к стилю вождения во время вождения вручную.
[0082] В способе помощи при движении согласно этому варианту осуществления, внешний сервер предоставляется за пределами транспортного средства, и тормозное расстояние изучается с использованием внешнего сервера. Это позволяет уменьшать нагрузку по обработке транспортного средства.
[0083] Помимо этого, в способе помощи при движении согласно этому варианту осуществления, результат изучения тормозного расстояния применяется к тормозному расстоянию для автоматизированного вождения транспортного средства. Это обеспечивает применение тормозного расстояния, которое изучается с использованием данных движения для случая отсутствия едущего впереди транспортного средства, к автоматизированному вождению, и в силу этого можно предоставлять автоматизированное вождение, которое основано на ощущении водителя.
[0084] Следует отметить, что вышеописанный вариант осуществления представляет собой пример настоящего изобретения. Таким образом, настоящее изобретение не ограничено вышеописанным вариантом осуществления, и, разумеется, что настоящее изобретение может модифицироваться на множество режимов, отличных от настоящего варианта осуществления, в зависимости от проектного решения и т.п. без отступления от технической идеи согласно настоящему изобретению.
Список номеров ссылок
[0085] 1 - устройство управления вождением
3 - модуль обнаружения состояния движения
5 - модуль обнаружения окружения движения
7 - переключатель для переключения режима вождения
9 - модуль представления состояния управления
11 - актуатор
21 - модуль хранения данных для изучения
23 - модуль изучения характеристик движения
25 - модуль выполнения управления автоматизированным вождением
100 - система управления вождением
Система топливного элемента и способ ее контроля
Электропроводный узел и топливный элемент с полимерным электролитом с его использованием
Преобразователь электрической мощности
Элемент аккумуляторной батареи и устройство мониторинга для батареи в сборе
Катализатор нейтрализации отработанных газов и способ его получения
Катализатор для очистки отработавших газов и способ его производства
Водоотталкивающая пленка и деталь для транспортного средства, включающая пленку
Конструкция для установки запасной шины
Токосъемник для вторичной батареи и вторичная батарея с его использованием
Устройство управления генерированием энергии и способ управления генерированием энергии для топливного элемента
Способ управления вождением и устройство управления вождением
Устройство управления автономным транспортным средством и способ управления автономным транспортным средством
Способ управления (варианты) и устройство управления для автоматически управляемого транспортного средства
Способ управления и устройство управления транспортного средства с функцией автоматического вождения
Способ помощи при вождении и устройство помощи при вождении
Способ управления транспортным средством и устройство управления транспортным средством
Способ управления транспортным средством и устройство управления транспортным средством
Способ помощи при движении и устройство помощи при движении
Способ поддержки вождения и устройство поддержки вождения

