Результат интеллектуальной деятельности: УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА
Вид РИД
Изобретение
Данное изобретение относится к устройству дистанционного управления для крана, строительной машины и/или автопогрузчика, с мобильным терминалом в виде планшетного компьютера, имеющего экран с функцией сенсорного экрана и по меньшей мере одно средство ввода данных для ввода команд управления в виде средства отображения на сенсорном экране, а также одно устройство для передачи сигналов для передачи введенных команд управления в блок управления крана, строительной машины или напольного автопогрузчика.
Устройство дистанционного управления для крана в виде планшета известно, например, из публикации DE 10 2014 216 982 A1. Для предотвращения нежелательных команд управления при неумышленном касании поверхности сенсорного экрана, предлагается использовать дополнительную подтверждающую кнопку для подтверждения команд управления, реализуемую посредством дополнительного модуля устройства с возможностью его присоединения к планшетному компьютеру. Однако при использовании планшетного компьютера в виде дистанционного управления для крана, строительной машины или напольного автопогрузчика возникает не только названная проблема неумышленных команд управления при нежелательном касании экрана, а также, прежде всего, проблема комфортабельной, приближенной к реальности передачи функций управления, создающей для пользователя дистанционным управлением интуитивное, передающее контроль ощущение управления.
Краны и подобные крупногабаритные устройства такие, как буронабивные устройства, карьерные комбайны или башенные экскаваторы довольно сложны в обслуживании и управлении. Причем проблемой является не только множество функций управления и их взаимодействие, а также связанные с этим действительно сложные по своей совокупности средства ввода данных, в частности, джойстики, ножные педали и переключатели управления, но и часто необычные, зависящие от машины реакции структур машины на движения исполнительных приводов.
При этом отсутствующие реакции крана и недостаточная приближенность к реальности при дистанционном управлении кранами, строительными машинами или напольными автопогрузчиками являются, в частности, во всех случаях проблемой, создающей для дистанционно управляющего оператора неуверенность. Например, при дистанционном управлении краном, оператор дистанционного управления не ощущает обычные реакции крана, передающие ему при непосредственном управлении в кабине крановщика интуитивное чувство правильного или ошибочного управления.
Поэтому для осуществления более близкого к реальности дистанционного управления, было уже задумано использовать приближенный к реальности пост управления, например, соответствующий кабине крановщика соответствующего типа крана и располагающий передачей команд управления посредством предусмотренных в нем средств ввода данных, таких, как джойстик, педали, управляющие выключатели или сенсорные экраны. Однако такие, подобные кабине крана, системы дистанционного управления привязаны к месту и не позволяют крановщику следить в деталях на месте за выполнением определенных задач, например, за зацеплением грузового крюка и т.д. Кроме того, нельзя изменять местоположение для лучшего обзора в зависимости от задачи.
Исходя из этого, предпочтительны сами по себе устройства дистанционного управления с мобильным терминалом, от которого крановщик может управлять и контролировать движения крана при любом местоположении. Однако такие мобильные терминалы в виде планшетов, используемые в публикации DE 10 2014 216 982 AI, подлежат усовершенствованию, в отношении комфортного управления, и они до настоящего времени действительно не удовлетворяют требованиям в отношении сложности функций управления кранами и подобными крупногабаритными устройствами.
Другая система дистанционного управления для крана известна из публикации DE 10 2012 216 489 A1, причем это известное прежде дистанционное управление должно использоваться для рабочих машин разных типов. Для этого дистанционное управление снабжено селекционным механизмом, позволяющим снижать количество обслуживающих меню и меню выбора отображающего устройства дистанционного управления, в зависимости от того, в какой конфигурации находится присоединенная рабочая машина. Тем не менее, у этого дистанционного управления не хватает описанной ранее достаточной приближенности к реальности, с трудом улучшаемой даже при адаптации обслуживающих меню к соответствующей рабочей машине.
Симулятор крана, работающий с виртуальными изображениями окружающей территории вокруг крана, известен, например, из публикации DE 10 2013 011 818 A1. В нем предусмотрена кабина крановщика в виде поста управления с соответствующими средствами ввода данных, причем смотровые окна или остекление имитируемой кабины крановщика заменены на экраны, на которых отображается виртуальное изображение окружающей территории вокруг крана.
Исходя из этого, в основе данного изобретения лежит задача создать усовершенствованное устройство дистанционного управления с планшетным компьютером прежде названного типа, лишенное недостатков уровня техники и предпочтительно усовершенствованное. В частности, нужно достигнуть более близкого к реальности, более комфортного дистанционного управления при эксплуатации крана или эксплуатации машин, лучше учитывающего сложные характеристиками крана или машин и делающее более надежным его управляемость.
Названная задача решается согласно изобретению с помощью устройства дистанционного управления согласно пункту 1 формулы изобретения. Предпочтительные варианты исполнения изобретения являются предметом зависимых пунктов формулы изобретения.
Предлагается использовать экран планшетного компьютера не только для ввода и отображения команд управления, но и для изображения реальных и/или заданных изображений рабочей среды машины, так чтобы оператор при вводе команд управления с помощью функции сенсорного экрана одновременно мог наблюдать на нем рабочую среду. Согласно изобретению планшетный компьютер для дистанционного управления конфигурирован для приема видеоданных камеры и/или цифровых данных из информационной модели здания, так называемой "BIM", для отображения на экране с помощью принятых видеоданных камеры и/или цифровых данных из информационной модели здания изображения окружающей территории вокруг машины и/или рабочего инструмента машины, и для отображения средств ввода данных для ввода команд управления в виде элемента сенсорного экрана по меньшей мере время от времени одновременно с изображением окружающей территории вокруг машины и/или рабочего инструмента на экране. С одной стороны, экран планшетного компьютера служит одновременно в качестве монитора для наблюдения за рабочей средой и/или за рабочим инструментом дистанционно управляемой машины, а с одной стороны, - в качестве панели управления для отображения и ввода команд управления. Таким образом можно достигать более комфортного и уверенного дистанционного управления, так как оператор, даже при наблюдении за поверхностью введения команд управления, не нужно бросать взгляд в разные стороны, так как на ней изображается рабочая среда, в которой нужно выполнять дистанционно управляемые движения.
Названные средства ввода данных для ввода команд управления в виде элемента отображения на сенсорном экране могут высвечиваться для этого, предпочтительно, непосредственно в изображении окружающей территории вокруг машины и/или рабочего инструмента в виде наложенного изображения, так что элемент изображения на сенсорном экране, изображается на экране планшетного компьютера, так сказать, на фоне рабочей или окружающей территории вокруг машины. Это можно использовать, например, для того, чтобы посредством соответствующих символов особенно выразительно изображать перемещение и/или команды рабочего хода, а, благодаря этому, обеспечивать оператору интуитивное обслуживание. Например, на изображении, показывающем грузовой крюк крана, могут высвечиваться стрелки перемещения в возможных направлениях движения, например, "вверх – вниз" и " направо – налево" и " вперед – назад" - в виде стрелок, продолжающихся в сторону от грузового крюка в соответствующих направлениях.
Однако альтернативно или дополнительно к таким передающим изображение рабочей среды элементам отображения сенсорного экрана также можно показывать названные элементы отображения сенсорного экрана для ввода команд управления на экране планшетного компьютера в отдельном окне, например, постоянно отображаемом на краю экрана или вызываемом по требованию в виде всплывающих окон и накладываемых на окно изображения картинки окружающей территории вокруг машины.
Предпочтительно, если изображенное на экране планшетного компьютера изображение окружающей территории вокруг машины и/или рабочей зоны и/или формируемого строительного объекта и/или рабочего инструмента машины содержит также виртуальное изображение, создаваемое при помощи данных строительного объекта и/или данных об участке застройки из цифровой модели участка застройки. Планшетный компьютер может иметь для этого графический имитационный модуль для вычисления виртуального изображения, причем такой графический имитационный модуль может быть соединен предпочтительно с интерфейсом данных в планшетном компьютере для загрузки данных участка и/или данных об участке застройки. Устройство обработки изображений планшетного компьютера может иметь для создания и/или подгонки виртуального изображения окружающей территории вокруг машины и/или участка и/или рабочего инструмента в зависимости от загруженных цифровых данных из цифровой модели участка застройки.
Предпочтительно, если планшетный компьютер содержит для этого в качестве интерфейса данных интерфейс CAD (система автоматизированного проектирования), с помощью которого в планшетный компьютер можно вводить данные системы автоматизированного проектирования, посредством которых на экране планшетного компьютера имитационным модулем создается виртуальное изображение. Альтернативно или дополнительно, планшетный компьютер содержит интерфейс видеоданных, с помощью которого можно загружать цифровые видеоданные, а затем создавать посредством названного устройства отработки изображений виртуальное изображение окружающей территории вокруг машины и/или рабочего инструмента и/или строительного объекта.
Однако предпочтительно, если на экране планшетного компьютера отображаются не только виртуальные изображения, но и воспроизводятся в реальном масштабе времени изображения камеры. Для отображения в равной степени, как реалистичных, так и информационных изображений, посредством которых дистанционно управляющий оператор может интуитивно контролировать машину, в предпочтительном усовершенствованном варианте изобретения мобильный терминал имеет устройство управления отображением, посредством которого можно создавать наложенное экранное изображение в виде виртуальной реальной картины на экране планшетного компьютера, составленное из принятых видеоданных от камеры и принятых цифровых данных из названной цифровой информационной модели здания (BIM), а вследствие этого, с одной стороны, из изображения окружающей территории вокруг машины, снятого камерой, а с другой – из виртуального изображения окружающей территории вокруг машины или элемента строительного объекта.
В такой составленной виртуально - реальной картине, отображаемой на экране планшетного компьютера и пополняемой при необходимости ранее разъясненными элементами отображения сенсорного экрана для ввода команд управления, можно, например, дополнять предоставленное одной или несколькими камерами изображение в реальном масштабе времени участка застройки контурами только еще формируемого участка, чтобы дистанционно управляющий оператор точно знал, куда следует перемещать соответствующий строительный элемент. Для этого добавляются уже имеющиеся на изображении в реальном масштабе времени контуры участка застройки и виртуальные контуры участка застройки, соответствующие следующему рабочему этапу, поэтому на экране планшетного компьютера на изображении в реальном масштабе времени отображается контур, формируемый на следующем рабочем этапе.
Альтернативно или дополнительно на изображение камеры в реальном масштабе времени рабочей среды управляемой машины могут передаваться определенные позиции, например, место подвоза строительных элементов, складское место для компонентов или ограничений допустимой рабочей зоны.
Созданное камерой изображение рабочей среды дистанционно управляемой машины в реальном масштабе времени может предоставляться в виде периодически обновляемого изображения веб-камеры, или также непрерывно поступающего "живого" изображения.
Такое реальное, создаваемое камерой изображение окружающей территории вокруг машины и/или рабочего инструмента может создаваться, в частности, в виде "живого" изображения или подобно телевизионному изображению видеоизображения, причем соответствующий видеосигнал передают по меньшей мере от одной камеры на дистанционно управляемой машине на удаленно расположенный планшетный компьютер устройства дистанционного управления и воспроизводят на его экране.
Альтернативно или дополнительно к видеокамере или телекамере можно работать также с другими отображающими изображение датчиками, например, с инфракрасным датчиком и/или радиолокационным датчиком и/или детектором – фотосмесителем, и/или с датчиком измерения времени пролета луча в виде так называемого "время – пролётного" датчика, с помощью которого измеряемые объекты подсвечивают импульсами света и измеряют время прохождения сигнала, благодаря которым можно затем рассчитывать удаление между камерой и объектом и создавать стереоскопическое изображение.
Предпочтительно, если также используют несколько отображающих изображение датчиков разного типа, например, камеру в сочетании с инфракрасным датчиком, причем их изображения можно накладывать и отображать на общем изображении, например, так, что на изображении, снятым камерой могут передаваться теплые участки инфракрасного изображения, например, отображающие людей. Тем не менее, применение видеокамеры и/или телекамеры предпочтительно в том отношении, что создает приближенное к реальности изображение, передающее оператору ощущение видения собственными глазами.
Такая камера или отображающее изображение сенсорное устройство для изображения окружающей территории вокруг машины или рабочего инструмента дистанционно управляемой машины может устанавливаться, например, на самой машине жестко или с возможностью поворота, например, на кабине крановщика крана и/или на крановой тележке башенно-поворотного крана, или в другом месте, причем камеру ориентируют, предпочтительно, так, чтобы можно было наблюдать за рабочим инструментом, например, за грузовым крюком крана. При этом предпочтительно можно предусматривать также множество камер с возможностью передвижения в разных местах, позволяющих наблюдать за рабочим инструментом из различных перспектив.
В предпочтительном усовершенствованном варианте изобретения можно также использовать камеру с возможностью перемещения и/или передвижения в различных местах, позволяющую изображать рабочий инструмент и/или окружающую территорию вокруг машины из различных направлений взгляда.
В усовершенствованном варианте изобретения можно также использовать камеру, в частности, смонтированную на беспилотном летательном аппарате. В частности, предлагается использовать дистанционно управляемый, снабженный камерой беспилотный летательный аппарат, посредством которого можно предоставлять желаемое изображение рабочего инструмента и/или внешней среды вокруг рабочего инструмента, снятое камерой из различных направлений взгляда, в частности, предоставлять посредством такого беспилотного летательного аппарата также перспективное изображение рабочего инструмента и его внешней среды, снятое камерой под косыми оптическими осями зрения, получаемые из точки, отстоящей от машины и ее кабины крановщика и выше пола, так что для оператора рабочий инструмент и его внешняя среда визуально отображаются из направления взгляда, как будто бы смотрел внешний наблюдатель. Например, в кран могут предоставляться изображения, грузового крюка и его внешней среды, снятые камерой, видимые через стрелу крана сбоку, под косым углом или на вертикальную центральную плоскость крана. Изображения грузового крюка могут предоставляться также из положений беспилотного летательного аппарата, находящихся в проходящей через стрелу крана, вертикальной центральной плоскости крана. Посредством таких перспективных изображений, снятых камерой из различных оптических осей зрения, могут лучше визуально отображаться относительные положения между рабочим инструментом и его внешней средой или конечным пунктом.
Для обеспечения простого обслуживания беспилотного летательного аппарата, беспилотным летательным аппаратом можно управлять в усовершенствованном варианте изобретения в зависимости от положения машины и/или положения рабочего инструмента так, что беспилотный летательный аппарат автоматически следует за машиной, в частности, за движениями рабочего инструмента и поддерживает по меньшей мере приближенно одно желаемое положение относительно машины и/или ее рабочего инструмента также при движениях машины, в частности, при движениях рабочего инструмента, или он пытается поддерживать это положение и перемещается вслед. При использовании беспилотного летательного аппарата, например, в сочетании с краном, беспилотный летательный аппарат в активированном автоматическом режиме следования может автоматически следовать за грузовым крюком крана. При желаемом и установленном относительном положении беспилотного летательного аппарата, например, примерно на высоте грузового крюка, или немного выше, на некотором расстоянии сбоку от вертикальной центральной плоскости крана через стрелу крана, беспилотный летательный аппарат может автоматически снижать свою высоту полета или увеличивать ее, если грузовой крюк опускается или поднимается, и/или перелетать параллельно вперед или назад к вертикальной центральной плоскости крана при перемещении крановой тележки крана, и/или лететь сбоку, поперек налево или направо при повороте крана.
Тем не менее, предпочтительно, если беспилотным летательным аппаратом можно также автономно дистанционно управлять так, что беспилотный летательный аппарат может свободно подлетать в различные желаемые положения относительно машины и/или ее рабочего инструмента. Это может осуществляться, например, при вводе желаемого положения для беспилотного летательного аппарата относительно грузового крюка или рабочего инструмента на сенсорном экране планшетного компьютера, например, так, что в модуль управления положением, предусмотренном в планшетном компьютере, вводят положение относительно грузового крюка: например, в виде " 2 м выше, сбоку, справа от грузового крюка". Альтернативно или дополнительно беспилотный летательный аппарат может летать также полностью свободно относительно машины и ее рабочего инструмента, например, с помощью отображения управления на сенсорном экране, причем беспилотный летательный аппарат будет летать, пока положение камеры и ее угол зрения на рабочий инструмент и его внешнюю среду не понравится крановщику или оператору.
Модуль управления камерой может устанавливаться в планшетном компьютере в виде программного модуля, например, в виде загружаемого приложения, причем команды управления для изменения положения камеры и/или направления взгляда камеры могут отображаться, например, в вызываемом окне управления в виде средства отображения сенсорного экрана.
Названное прежде виртуальное изображение окружающей территории вокруг машины можно предпочтительно изменять с помощью графического имитационного модуля и в зависимости от различных массивов данных, вводимых через интерфейс в имитационный модуль, адаптируя их к различным сценариям. В частности, данные планирования можно вводить через соответствующий интерфейс данных в имитационный модуль в виде данных системы автоматизированного проектирования строящегося строительного объекта и/или данных участка застройки в реальном масштабе времени, воспроизводящих фактическое состояние возводимого здания или строительного объекта в зависимости от продвижения его строительства и использовать их имитационным модулем для того, чтобы создавать или адаптировать к ним виртуальное изображение окружающей территории вокруг машины, в частности, в соответствии с загруженным массивом данных, в зависимости от загруженных данных планирования и/или данных участка застройки в реальном масштабе времени.
Названная информация об участке застройки или строительном объекте может быть, как указано выше, данными системы автоматизированного проектирования или другими геометрическими данными строительного объекта или участка застройки, причем при необходимости могут найти применение также цифровые видеоданные, воспроизводящие фактический строительный объект и фактическое продвижение его строительства. Такие видеоданные могут вводиться в виде данных окружающей территории вокруг машины через названный интерфейс CAD (система автоматизированного проектирования) или интерфейс видеоданных в графический имитационный модуль, адаптирующий затем виртуальное изображение к этим взятым данным CAD (системы автоматизированного проектирования) и/или видеоданным.
Моделирование планируемого или уже существующего, или частично выполненного участка застройки и соответствующее создание виртуального изображения окружающей территории вокруг машины с помощью графического имитационного модуля является, в частности, также ценным вспомогательным средством для обеспечения логистики на участке застройки, а также для возможности симулирования и отработки критических вариантов развития событий еще перед началом строительства.
В предпочтительном усовершенствованном варианте изобретения устройство для дистанционного управления можно присоединять к различным устройствам, в частности, к различным типам устройств и налаживать обмен данными для управления с соответственно выбранным устройством. Это могут быть, в частности, различные устройства, используемые на участке застройки: краны, экскаваторы, гусеничные тракторы или подобные машины, а также и используемые в различных местах устройства. В зависимости от того, каким устройством нужно дистанционно управлять, может создаваться канал связи для управления от устройства дистанционного управления и/или от соответствующего устройства, например, при наборе номера соответствующего адреса IP через роутер, если осуществляют сетевое соединение, или также другим способом. Для обеспечения достаточно быстрого обмена данными между дистанционным управлением и машиной, предпочтительно выбирают канал связи с высокой полосой пропускания для предотвращения проблем реального времени или временного сдвига между командами управления и реакциями машины.
Для наиболее близкого к реальности отображения реакции машины различных типов машин, в усовершенствованном варианте изобретения, устройство дистанционного управления может иметь конфигурационный модуль, посредством которого устройство дистанционного управления выборочно задает предварительные настройки для соответственно дистанционно управляемого типа машины. Названные средства предварительной настройки могут адаптировать отображаемые на экране планшета элементы управления сенсорного экрана, а также выбор меню управления и изображения на экране к соответствующему устройству. Однако, в частности, могут предусматриваться средства предварительной настройки для управления движением, посредством которых отображаемые элементы управления предварительно конфигурируют для приводных устройств машины и адаптируют их к соответствующему типу машины, так как, например, верхне - поворотный башенно-поворотный кран имеет другие приводы, по сравнению с нижне-поворотным башенно-поворотным краном или телескопическим поворотным краном с подъемной стрелой, или экскаватором.
Кроме того, конфигурационный модуль может иметь также средство для предварительной настройки для адаптации устройства отображения и воспроизводимого на нем изображения к окружающей территории вокруг машины и/или к рабочему инструменту, причем названные средства предварительной конфигурации могут предпочтительно, адаптировать изображение и/или устройство отображения к камерам, имеющимся или использующимся на соответствующем типе дистанционно управляемой машины, и/или, если изображение вычисляется виртуально, - адаптировать параметры для расчета виртуального изображения к соответствующим типам машины.
Для возможности простого ношения или направления планшетного компьютера на теле, устройство дистанционного управления может содержать предпочтительно монтажное приспособление для тела, для установки или фиксации планшетного компьютера на теле оператора, причем названное монтажное приспособление для тела может содержать предпочтительно нашейный и/или наплечный ремень, с возможностью его укладывания вокруг шеи и/или плеч оператора и с возможностью фиксации к планшетному компьютеру. Для крепления пояса к планшетному компьютеру может быть предусмотрена, например, фиксирующая рамка, в которую можно задвигать или вставлять, или фиксировать другим способом планшетный компьютер и соединять с названным ремнем.
Указанный нашейный и/или наплечный ремень можно предпочтительно регулировать по длине.
Для возможности использования планшетного компьютера в ненапряженном положении рук, названное монтажное приспособление для тела может предпочтительно содержать распорный элемент, позиционирующий планшетный компьютер впереди, на некотором расстоянии от живота оператора. Такой распорный элемент может содержать опорную стойку, с возможностью ее, например, крепления с фиксированной ориентацией с помощью вышеуказанной фиксирующей рамки на планшетном компьютере и поддерживающей планшетный компьютер относительно живота или передней части тела пользователя на некотором удалении.
Для облегчения манипулирования устройством дистанционного управления дополнительно к названному планшету может быть предусмотрен также другой структурный электронный элемент, обеспечивающий или позволяющий вводить команды управления. В частности, такой структурный электронный элемент может быть интегрирован в наручные часы, выполненные в виде так называемых "умных" часов и имеющие экран с функцией сенсорного экрана. Однако, альтернативно или дополнительно к такому экрану с функцией сенсорного экрана наручные часы могут иметь механические элементы введения для ввода команд управления, например, кнопки, ручки настройки или ползунки. Предпочтительно, если названный электронный структурный элемент наручных часов имеет конфигурацию для ввода простых команд управления, например, команд "вверх" и, "вниз" для подъема и опускания грузового крюка крана. Такие простые команды управления можно вводить также надежно вводить с помощью электронного структурного элемента наручных часов, не используя для этого вышеуказанный планшетный компьютер.
Такой дополнительный электронный структурный элемент может взаимодействовать с планшетным компьютером, например, с помощью соединения "блютуз" или другого канала связи данных. Введенные в дополнительный электронный структурный элемент команды управления могут передаваться в планшетный компьютер, а от него, в свою очередь, на устройство управления дистанционно управляемой машины. И наоборот, от планшетного компьютера сигналы отображения могут передаваться в дополнительный электронный структурный элемент для соответствующего отображения на нем.
Тем не менее, альтернативно или дополнительно к такому "треугольному" обмену данными с помощью планшетного компьютера, также возможно, что названный дополнительный электронный структурный элемент непосредственно взаимодействует с устройством управления дистанционно управляемой машины, например, с помощью подходящей радиосвязи или других средств коммуникации данных, таких, как роутер.
Далее приводится более подробное разъяснение изобретения с помощью одного примера исполнения со ссылкой на соответствующие чертежи. На них в схематическом виде показаны:
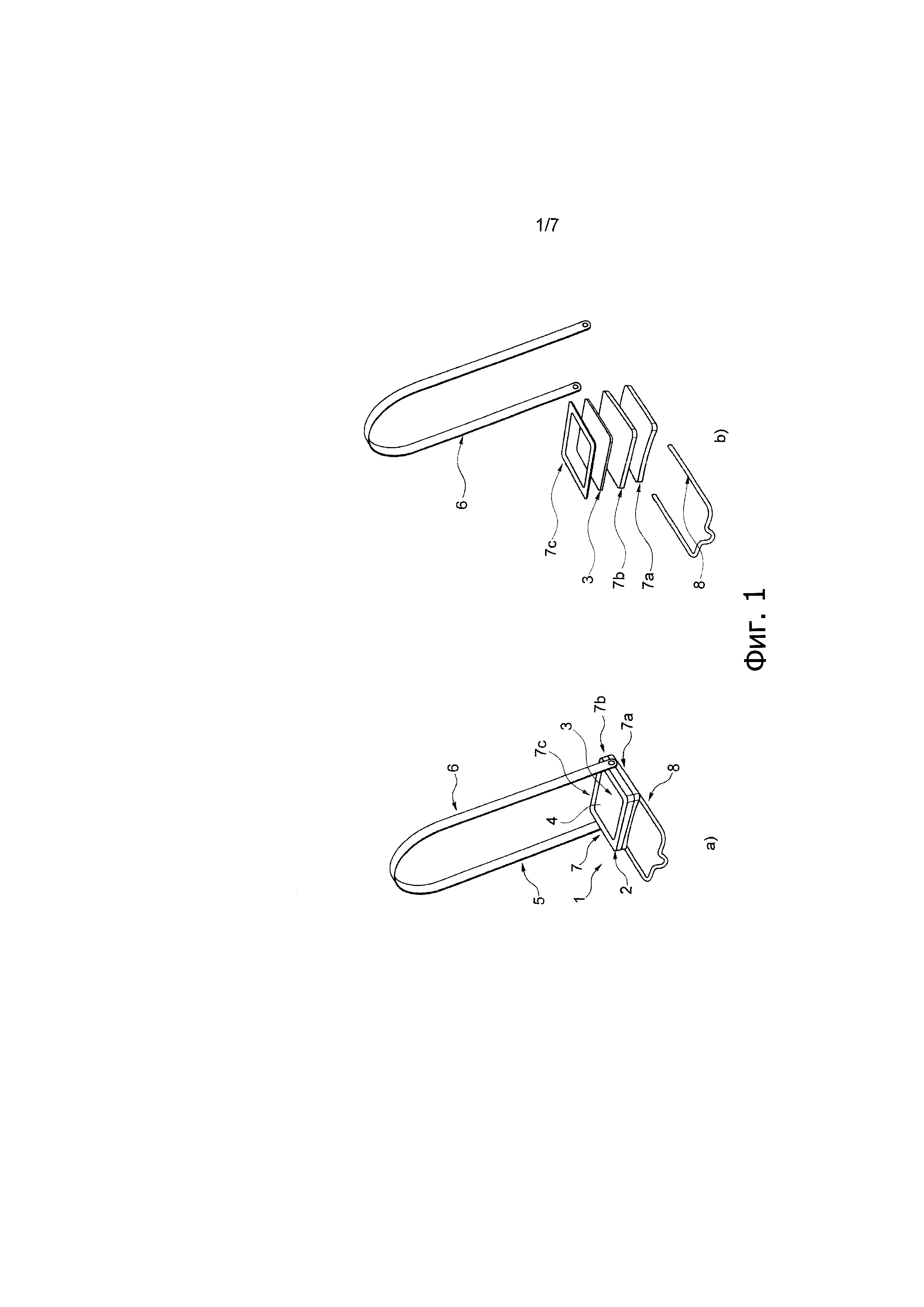
фиг. 1. Изображение дистанционного управления в виде планшетного компьютера с сенсорным экраном для дистанционного управления краном, строительной машиной или напольным автопогрузчиком, причем фрагмент (a) поддерживающего устройства для планшетного компьютера показан в смонтированном состоянии, а фрагмент (b) поддерживающего устройства - в разобранном виде;
фиг. 2. Перспективное изображение дополнительного электронного структурного элемента устройства дистанционного управления, выполненного в виде наручных часов и позволяющего вводить команды управления " вверх " и " вниз " для грузового крюка крана или подобные команды управления;
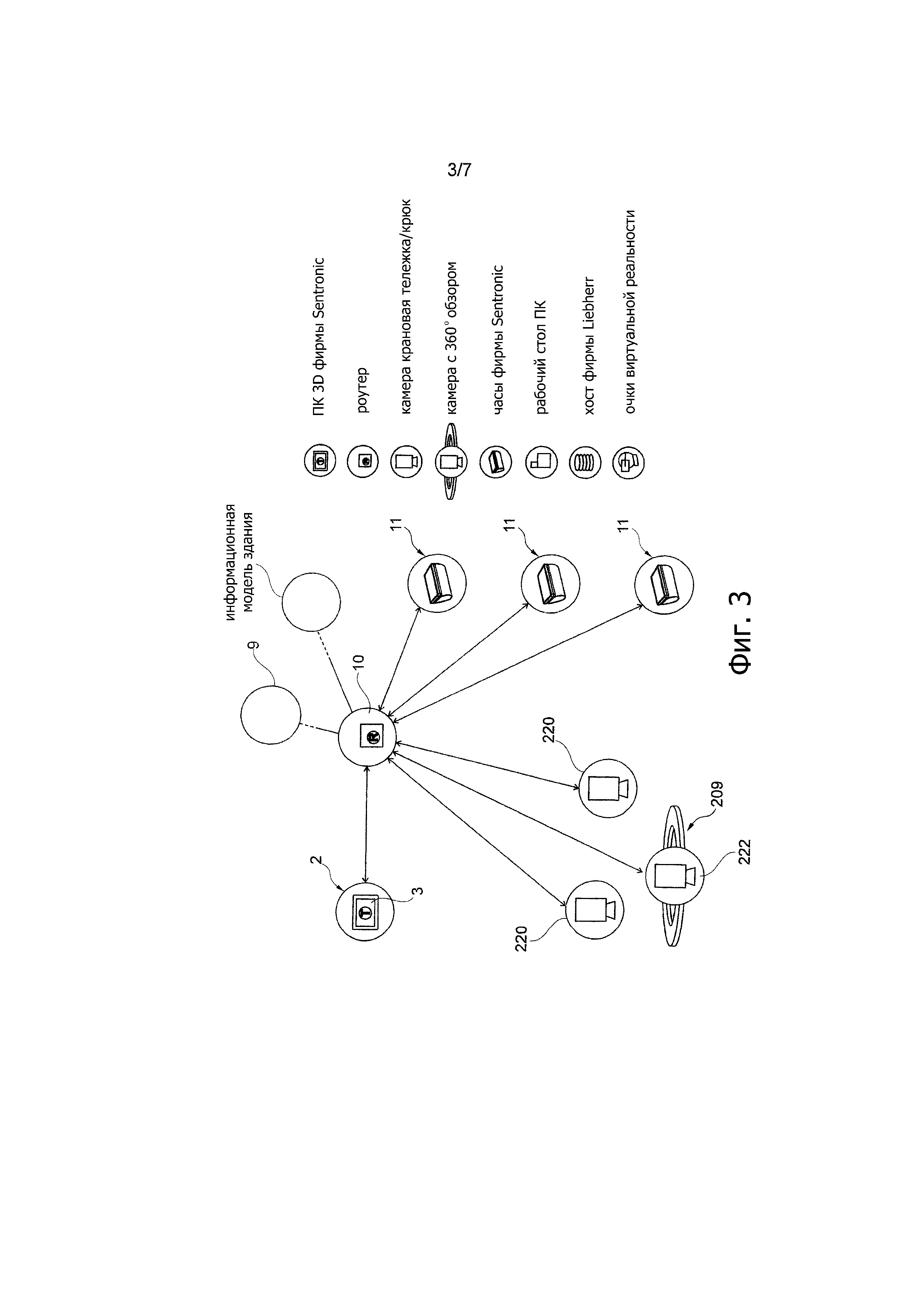
фиг. 3. Изображение системной архитектуры дистанционного управления и их компонентов согласно предыдущим фигурам;
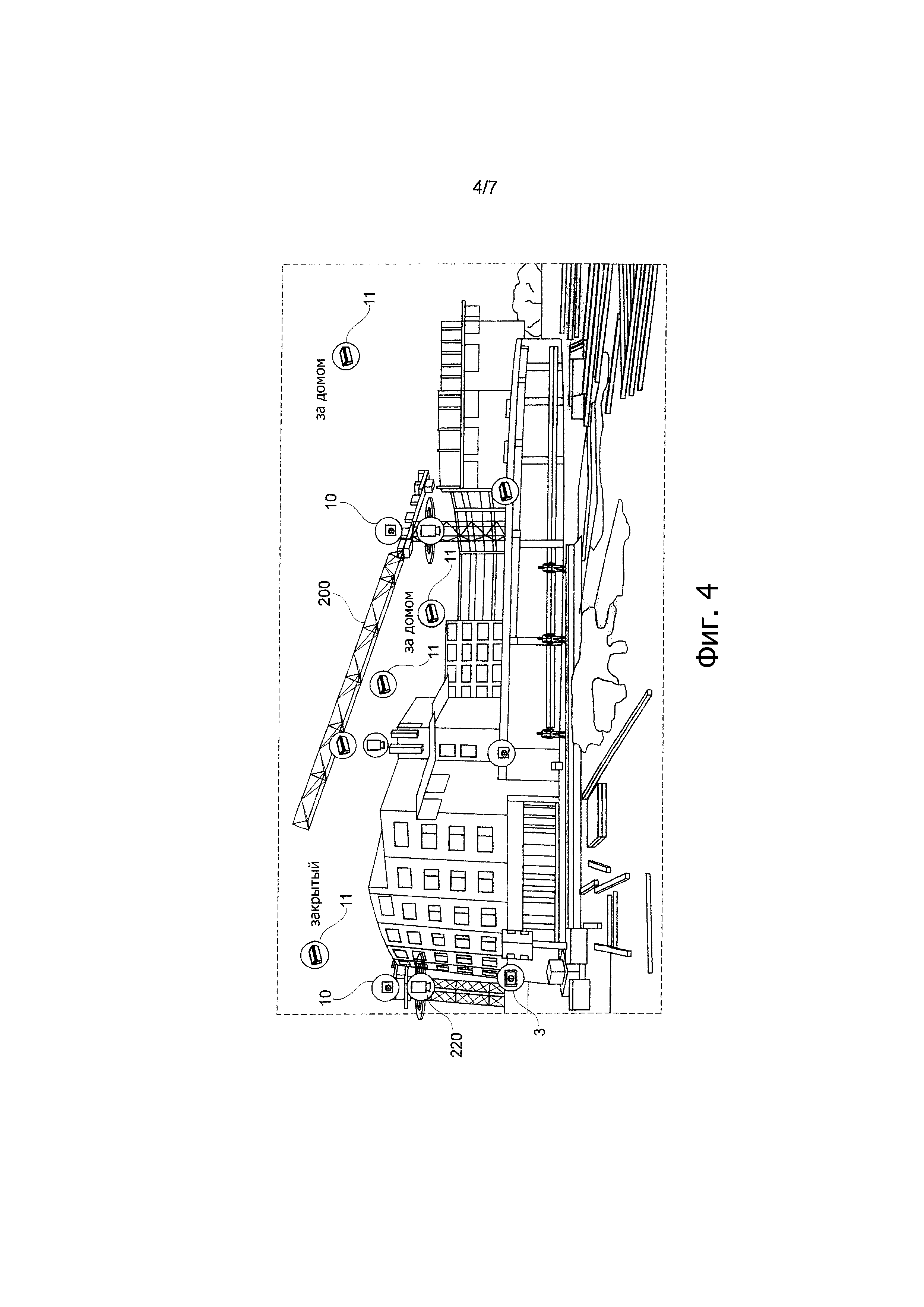
фиг. 4. Изображение крана, в своей рабочей среде участка застройки, а также компонентов устройства дистанционного управления для крана по предыдущим фигурам;
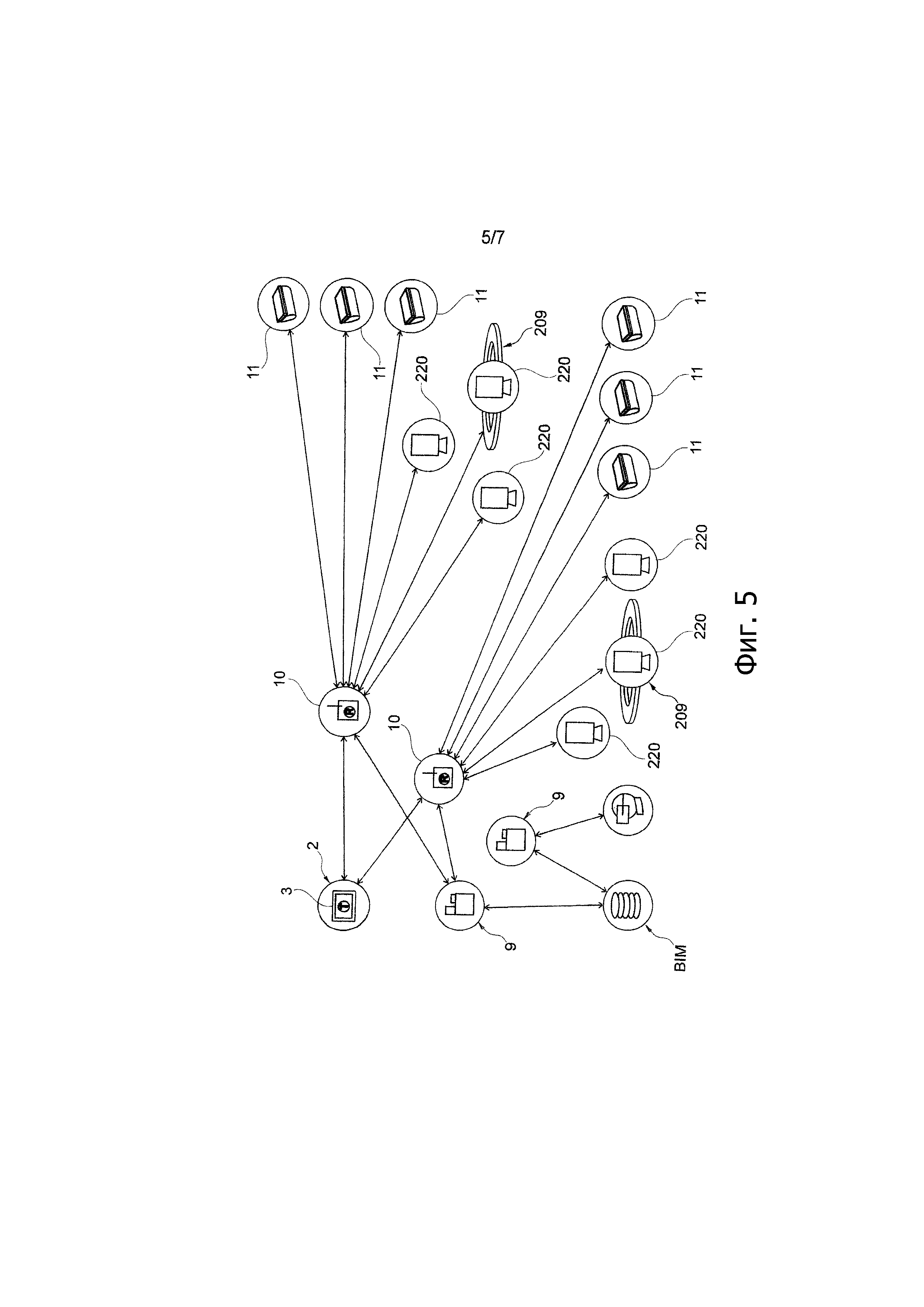
фиг. 5. Изображение системной архитектуры нескольких, соединенных друг с другом по сети устройств дистанционного управления для дистанционного управления несколькими кранами или подобными машинами;
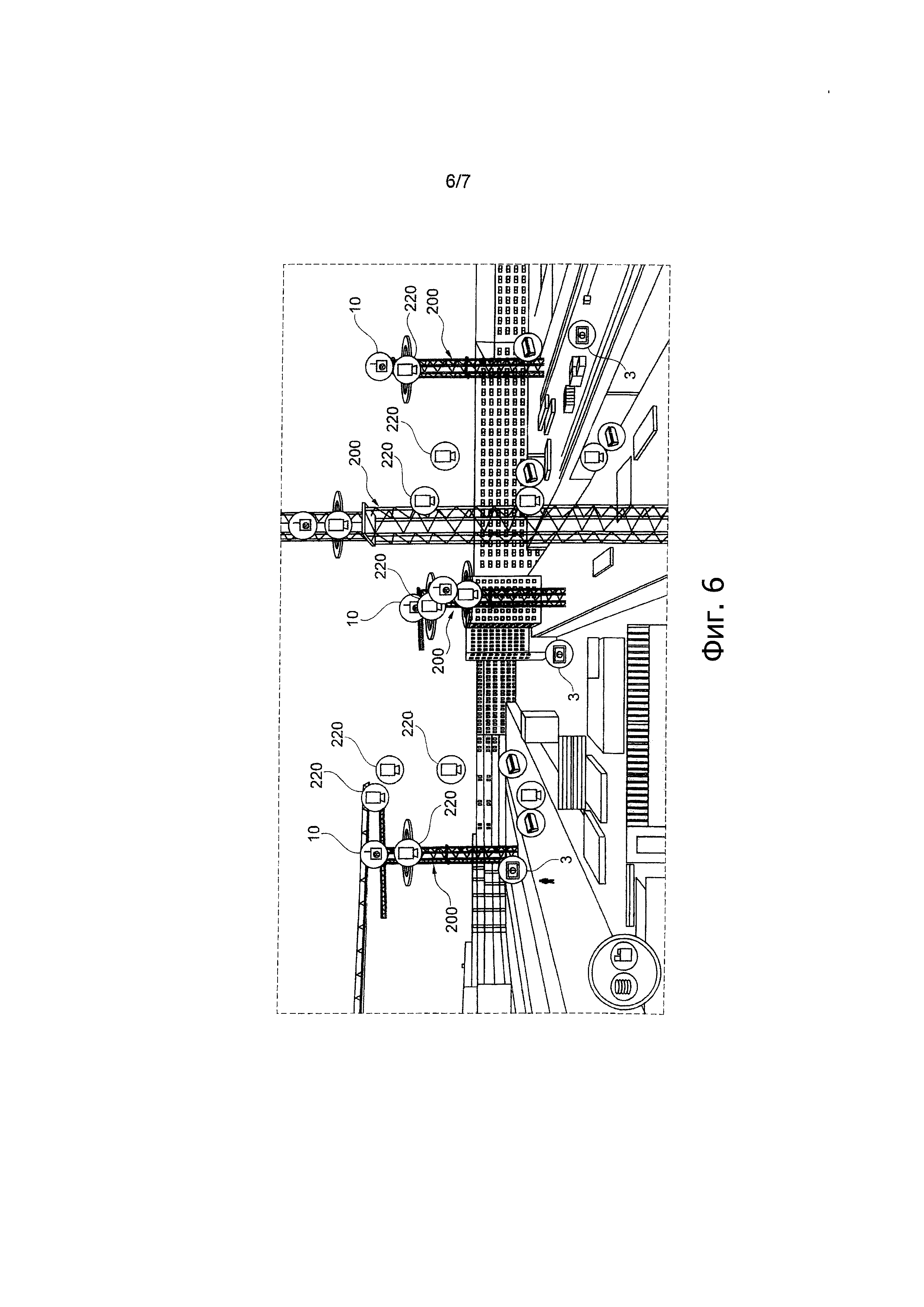
фиг. 6. Изображение нескольких кранов, с возможностью их использования с помощью соединенных друг с другом по сети устройств дистанционного управления по фиг. 5 и
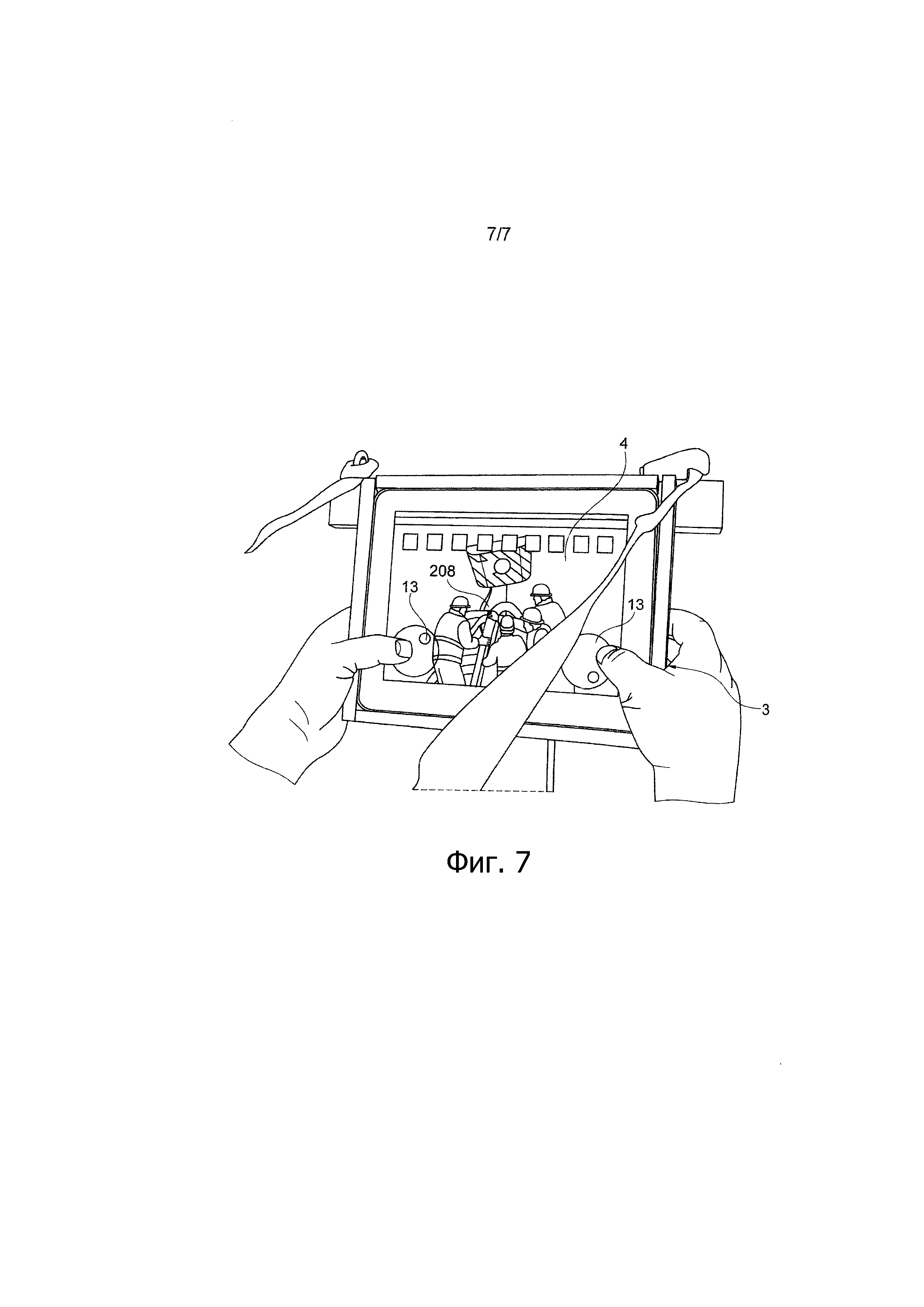
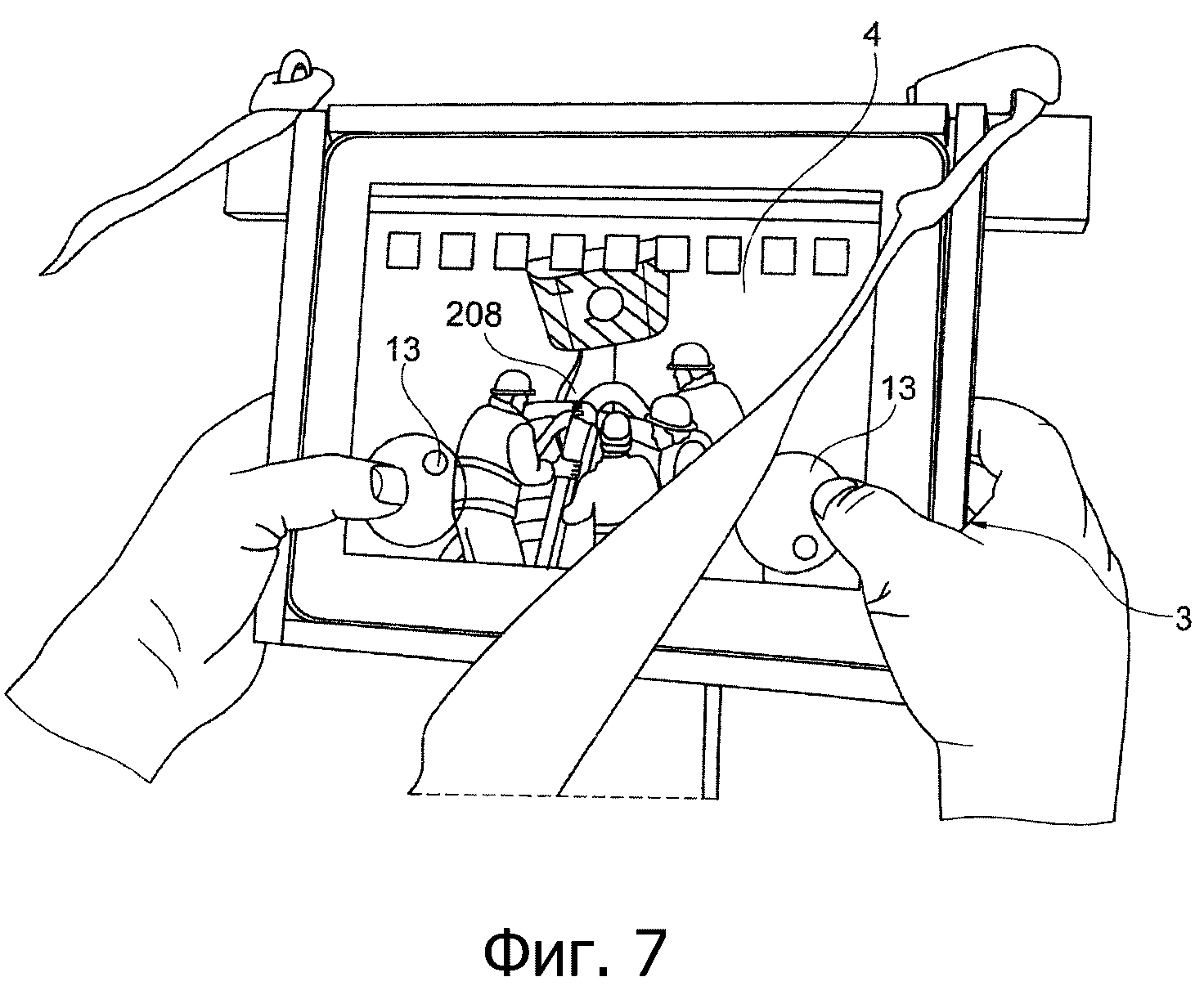
фиг. 7. Изображение экрана планшетного компьютера устройства дистанционного управления по предыдущим фигурам, причем на экране камерой отображается изображение в реальном масштабе времени грузового крюка крана и на нем высвечены средства отображения сенсорного экрана для ввода команд управления.
Как показано на фиг. 1, устройство 1 дистанционного управления может быть выполнено в виде системы дистанционного управления краном, содержащей мобильный терминал 2 в виде планшетного компьютера 3 и которая может найти применение, например, для дистанционного управления башенно-поворотным краном, портовым краном или морским краном, или передвижным телескопическим краном.
Кран 200 выполнен в публикации в виде башенно-поворотного крана, башня которого несет стрелу крана, на которой установлена крановая тележка с возможностью перемещения, (сравни с фиг. 4). Стрела крана может поворачиваться вместе с башней или также без башни, в зависимости от варианта выполнения крана - в виде верхне - поворотного крана или нижне - поворотного крана, - вокруг вертикальной оси, для чего предусмотрен привод поворотного механизма. Стрела крана могла бы быть выполнена при необходимости также с возможностью качения вверх и вниз вокруг горизонтальной поперечной оси, причем предусматривался бы привод качения, например, во взаимодействии с ослаблением натяжения стрелы. Упомянутая крановая тележка может перемещаться посредством лебёдки для передвижения крановой тележки или другого привода крановой тележки.
Как показано на фиг. 1, упомянутое устройство 1 дистанционного управления может содержать стандартный сам по себе планшетный компьютер 3, с возможностью конфигурирования при загрузке соответствующих программных модулей, например, при загрузке приложений для дистанционного управления упомянутым краном. При этом планшетный компьютер 3 содержит экран 4, занимающий, по существу, всю переднюю сторону планшетного компьютера 3 и который может быть выполнен в виде сенсорного экрана.
Для возможности лучшего поддерживания или направления планшетного компьютера 3, предусмотрено монтажное приспособление 5 для тела, посредством которого планшетный компьютер 3 поддерживается на теле оператора. При этом упомянутое монтажное приспособление 5 для тела может содержать, предпочтительно, несущий пояс или ремень 6, выполненный в виде нашейного ремня или при необходимости также наплечного ремня и предназначенного для подвешивания на шею или на плечо оператора. При этом упомянутый несущий пояс 6 может иметь возможность регулирования по длине для регулирования положения ношения на теле.
Названный наплечный ремень 6 соединен с планшетным компьютером 3 фиксирующей рамкой 7, в которой может фиксироваться с возможностью разъединения плоский планшетный компьютер 3 в виде панели, Как показано на фиг. 1, фиксирующая рамка 7 может выполняться составной и иметь подобную сэндвичу структуру, между частями которой поддерживается планшетный компьютер 3. Например, может быть предусмотрен корытообразный донный блок 7a, в который планшетный компьютер может вставляться с точной подгонкой, при необходимости, при промежуточной установке элемента из мягкого материала 7b или мягкого облицовочного элемента, состоящего, например, из мягкого полимерного материала и защищающего планшетный компьютер 3 от ударов и/или корректирующего допустимые отклонения подгонки к корытообразному донному блоку. Закрывающая рамка 7c может накладываться сверху на планшетный компьютер 3 для поддерживания его в донном блоке 7a.
Предпочтительно, если монтажное приспособление 5 для тела может содержать распорный элемент 8 с возможностью его установки на фиксирующей рамке 7 с заданной ориентацией, в частности, с возможностью выравнивания, отстоя от узкой стороны планшетного компьютера 3 для фиксации планшетного компьютера 3 с опорой от живота оператора вперед. Как показано на фиг. 1, такой распорный элемент 8 может быть выполнен, например, в виде опорной скобы, с возможностью задвигать ее в фиксирующую рамку 7 для размещения в транспортировочном положении спрятанной, или, наоборот, выдвинутой - для опоры планшетного компьютера 3 в рабочем положении согласно фрагменту (a) по фиг.1.
Как показано на фиг. 3, планшетный компьютер 3 может взаимодействовать, предпочтительно, с помощью беспроводного канала связи данных с управляющим компьютером 9, который может непосредственно являться управляющим компьютером крана или составлять его устройство управления, или, альтернативно, ЭВМ стройплощадки, в свою очередь с возможностью взаимодействовать с одним или несколькими устройствами управления одного или нескольких кранов. Как показано на фиг. 3, названный управляющий компьютер 9 может содержать роутер 10, к которому присоединен, с одной стороны, планшетный компьютер 3, а, с другой стороны, другие структурные элементы электронного блока.
Кроме того, как показано на фиг. 2, дополнительный структурный элемент 11 электронного блока может быть частью устройства 1 дистанционного управления, выполненный, например, в виде наручных часов или фиксированный другим способом на теле с возможностью ношения. В частности, названный электронный структурный элемент 11 может быть выполнен в виде так называемых "умных" часов 12, содержащих экран с функцией сенсорного экрана для возможности введения команд управления для крана.
На названном планшетном компьютере 3 и на дополнительных " умных " часах 12, выполненных также при необходимости в виде мобильного телефона, могут отображаться на экранах при загрузке соответствующих программных модулей панели управления, позволяющие вводить команды управления. В частности, на экране 4 планшетного компьютера 3 и на экране " умных " часов 12 могут отображаться соответственно средства 13 отображения сенсорного экрана в виде графических символов: стрелок, пиктограмм или букв и/или числовых символов, инициирующих соответствующую команду управления при касании пальцем или ручкой, что собственно получило известность, как сенсорная-экранная технология.
При этом, на планшетном компьютере 3 изображены не только названные команды управления или располагающиеся для этого средства 13 отображения сенсорного экрана, а, предпочтительно, также изображение в реальном масштабе времени окружающей территории вокруг машины или рабочей внешней среды, и/или виртуальное изображение рабочей внешней среды или формируемого строительного объекта, и/или других, полезных для трудового процесса конструктивных элементов или информации.
Как это показано на фиг. 3, планшетный компьютер 3 может соединяться для этого с помощью названного роутера 10 с " BIM ", то есть, с так называемой " информационной моделью здания ", записанной в памяти в управляющем компьютере 9 или к который управляющий компьютер 9 имеет доступ. При необходимости планшетный компьютер 3 может взаимодействовать также, минуя роутер 10, непосредственно с названной цифровой моделью здания. Через соответствующий интерфейс данных в планшетный компьютер 3 из цифровой модели здания можно вводить соответствующую цифровую информацию о строительном объекте и/или участке застройки или другую релевантную цифровую информацию, отображаемую на экране 4 планшетного компьютера 3. В частности, виртуальные изображения сооружаемой участка и/или рабочей среды крана могут изображаться посредством данных BIM.
Альтернативно или дополнительно к такому виртуальному изображению, в планшетном компьютере 3 может также использоваться реальное созданное камерой изображение окружающей территории вокруг крана и/или грузового крюка. Для этого на кране 200 может монтироваться по меньшей мере одна камера, "живое" изображение которой передается на планшет 3. Такая камера 220 может быть смонтирована, например, в кабине крановщика дистанционно управляемого крана 200 и иметь оптическую ось зрения, предпочтительно соответствующую по меньшей мере приближенно оптической оси зрения крановщика в кабине крановщика и/или проходящую от кабины крановщика к грузовому крюку.
Однако, альтернативно или дополнительно могут снимать и другие камеры и/или сниматься изображения из других перспектив и передаваться на планшетный компьютер 3 для отображения на нем. В частности, может использоваться беспилотный летательный аппарат, снабженный по меньшей мере одной камерой и с возможностью перемещения относительно крана 200 с помощью дистанционного управления.
Для наблюдения за грузовым крюком, соединенным с отходящим от крановой тележки подъемным канатом, или установленным на нем грузом или внешней средой грузового крюка 208, даже когда грузовой крюк 208 находится вне поля зрения из кабины крановщика или крановщика, например если, как показано на фиг. 1, груз нужно ставить на землю за зданием, предусмотрен предлагаемый согласно изобретению беспилотный летательный аппарат 209, на котором смонтирована по меньшей мере одна камера 220, посредством которой может предоставляться изображение, снятое камерой грузового крюка 208 и/или внешней среды грузового крюка. Названное изображение, снятое камерой, является предпочтительно " живым " изображением или изображением в реальном масштабе времени в виде телевизионного или видеоизображения и с возможностью его передачи от камеры 220 беспилотного летательного аппарата 209 по беспроводным линиям связи на дисплей планшета 3.
Беспилотный летательный аппарат 209 снабжен устройством 212 дистанционного управления, позволяющим дистанционно управлять беспилотным летательным аппаратом 209, в частности, управлять узлами управления полетом, например, несущими винтами для дистанционного управления положением полета беспилотного летательного аппарата 209 и/или дистанционно управляемой камерой 220, в частности, относительно угла поворота или оптической оси зрения камеры 220 относительно корпуса беспилотного летательного аппарата 209 и/или фокусного расстояния камеры 220.
Соответствующий модуль дистанционного управления может быть предусмотрен в мобильном пульте 2 управления. В частности, планшетный компьютер 3 может иметь вызываемое меню управления для беспилотного летательного аппарата 209, посредством которого можно управлять положением полета беспилотного летательного аппарата 209 относительно крана 200, в частности, относительно его крановой тележки. Например, желаемое положение относительно крановой тележки и/или относительно грузового крюка можно вводить с помощью соответствующих элементов управления сенсорного экрана, удерживающее затем самостоятельно беспилотный летательный аппарат 209.
Для обеспечения простого обслуживания также может предусматриваться голосовое управление и/или выборочное управление с помощью меню, тем не менее, для беспилотного летательного аппарата 209, например, для выбора желаемого относительного положения из нескольких заданных относительных положений беспилотного летательного аппарата 209 относительно крана. Это может осуществляться, например, посредством того, что с помощью голосового управления и/или меню управления вводят "положение беспилотного летательного аппарата 1", заранее запрограммированное или заданное в памяти устройства 213 управления положением.
Предпочтительно, если планшетный компьютер 3 конфигурирован для выбора одного желаемого из нескольких предоставленных в распоряжение изображений, снятых камерой.
В соответственно выбранном изображении, снятом камерой, отображаемое на экране планшетного компьютера 3, могут высвечиваться другие виртуальные изображения при высвечивании и/или синтезе изображения, создаваемые с помощью загруженных из информационной модели здания (BIM) цифровых данных, поэтому экран планшетного компьютера 3 отображает равным образом, как реальное изображение в реальном масштабе времени, предоставляемое камерой, так и высвечиваемые на нем виртуальные элементы изображения рабочей среды, например, контур строительного объекта.
Как показано на фиг. 7, в изображении, показываемом на экране планшетного компьютера 3, могут высвечиваться, кроме того, также средства 13 отображения сенсорного экрана для ввода команд управления, причем в показанном примере на фиг. 7 изображены средства изменения масштаба изображения для увеличения изображения грузового крюка 208 или для изменения фокусного расстояния, и/или фрагмента изображения камеры.
Если управляющий дистанционно оператор хочет переставить или переместить, например, поднять или опустить показанный на фиг. 7 на экране крюк 208 крана, то для этого планшетный компьютер 3 может иметь, например, такую конфигурацию, что при касании полоски периферии экрана показываются имеющиеся в распоряжении команды управления в виде выходящего или всплывающего окна управления. На нем могут отображаться, например, средства 13 отображения сенсорного экрана в виде стрелок перемещения в определенных направлениях, касание которых приводит затем к соответствующему перемещению.
Альтернативно или дополнительно планшетный компьютер 3 может также иметь конфигурацию для идентификации переставляемого или перемещаемого конструктивного элемента машины при касании на экране планшетного компьютера 3 и создания затем соответствующей команды управления при перетаскивании или перемещении затронутого элемента изображения на экране. Например, можно прикоснуться к изображенному на фиг. 7 на экране планшетного компьютера 3 грузовому крюку 208, что планшетный компьютер 3 интерпретирует, как желание перемещения положения для грузового крюка. Если, например, прикоснувшийся к грузовому крюку палец скользит затем вверх или вниз на экране планшетного компьютера, то планшетный компьютер 3 интерпретирует это, как желание перемещения вверх или вниз и создает соответствующую команду управления. Такой способ скольжения обеспечивает наиболее интуитивное обслуживание дистанционно управляемой машины.
Альтернативно или дополнительно к такому созданию команд управления в планшетном компьютере 3 оператор может вводить также соответствующую команду управления также через ранее названные "умные" часы 12.
Как показано на фиг. 3, устройство 1 дистанционного управления может работать при непосредственном соединении с дистанционно управляемой машиной, причем в этом случае планшетный компьютер 3 и возможные имеющиеся электронные структурные элементы 11 взаимодействуют с помощью названного роутера 10 с устройством управления соответствующей машины.
Однако, как показано на фигурах 5 и 6, также и несколько устройств 1 дистанционного управления могут работать вместе в сетевом соединении для дистанционного управления несколькими машинами, например, кранами 200 участка застройки, причем, например, посредством трех устройств 1 дистанционного управления можно управлять шестью кранами. Для этого по сети, с помощью которой устройства 1 дистанционные управления соединены с кранами, можно от одного устройства 1 дистанционного управления получить доступ к нескольким кранам. Для этого соответствующий планшетный компьютер 3 может содержать, например, меню выбора, посредством которого можно выбрать один из нескольких кранов, присоединенный к сети, после чего послать созданную в планшетном компьютере 3 команду управления в выбранный кран.
Фундаментное анкерное устройство для рабочей машины
Ограждающая рама, способ монтажа ограждающей рамы, применение ограждающей рамы для соединения башенного поворотного крана с объектом
Кран
Смеситель строительных материалов
Способ контроля безопасности крана, а также система для контроля безопасности крана
Самоподъемная система для крана
Кран, а также способ контроля предохранения от перегрузок такого крана
Способ монтажа крана
Устройство для контролирования рабочих параметров и/или определения состояния износа троса при использовании в подъемных механизмах
Способ и устройство для проектирования и/или управления, и/или имитации работы строительной машины

