Результат интеллектуальной деятельности: БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ
Вид РИД
Изобретение
Изобретение относится к средним по взлетной массе, малоскоростным, средневысотным беспилотным летательным аппаратам (БЛА).
К основным направлениям использования предлагаемого БЛА относятся: дистанционный мониторинг окружающей среды, разведка, целеуказание и нанесение боевых ударов. При этом, одной из важных летно-технических характеристик является продолжительность полета.
Широкий спектр применения БЛА требует от их создателей разработки большого многообразия целевых нагрузок-датчиков: видеокамер, многоспектральных приемников ИК диапазонов, многодиапазонных средств радиотехнической и радиолокационной разведок и др.
Учитывая, что грузоподъемность БЛА средней дальности (СД) и малой дальности (МД) различного назначения невелика (до 50…100 кг), возникает актуальная задача разработок целевых нагрузок в весьма ограниченных массогабаритах.
Известен БЛА средней и малой дальности характеризующийся наличием фюзеляжа, выполненного с покрытием, снижающим радиолокационную заметность, в котором размещены отсек бортового оборудования, включающий радиоэлектронную аппаратуру и отсек полезной (целевой) нагрузки - комплекс обороны, обзорную систему (см. патент РФ на полезную модель №143213, от 25.02.2014 г. МПК В64С 5/02).
Известно решение (см. патент РФ №2533779 от 11.09.2012 г. МПК G01S 7/40, D64C 39/02), в котором в имитационно-испытательных комплексах радиолокационных средств используют БЛА, содержащий, фюзеляж, крылья, оперение, двигатель, устройство посадки. В фюзеляже БЛА размещены в средней ее части навигационная система, подключенная к спутниковой навигационной системе (СНС), в носовой части - измерительная радиоэлектронная система, антенна, которая установлена в частях фюзеляжа, выполненных с радиопрозрачным покрытием.
Недостатком известных БЛА является ограниченный круг решаемых задач, т.к. использование в известных БЛА многофункциональных и многодиапазонных радиолокаторов и многоцелевых нагрузок ограничено грузоподъемностью БЛА СД и МД (до 50…100 кг), в результате чего возникает актуальная задача разработок целевых нагрузок в весьма ограниченных массогабаритных показателях. Наибольшие трудности возникают при разработке многодиапазонных бортовых радиолокаторов из-за наличия в их составе антенных систем, масса и габариты которых определяются используемым частотным диапазоном.
Выбор диапазонов радиолокаторов определяется задачами БЛА, типом лоцируемых целей, требованием экономии временных ресурсов, с целью уменьшить временной интервал обнаружения и др.
Практика показывает, что ключевым вопросом получения детальных радиолокационных изображений (РЛИ) высокого качества является необходимость компенсации приводящих к их расфокусировке фазовых искажений в радиосигнале, связанных с траекторными нестабильностями полета и вибрациями корпуса БЛА, и, как следствие, отклонением фазового центра антенны (ФЦА) от заданной траектории движения.
При оперативной работе и при необходимости повышения точности определения координат получать детальные радиолокационные изображения (РЛИ) необходимо непосредственно на борту БЛА в реальном масштабе времени без какого-либо вмешательства оператора в процесс обработки радиолокационной информации. В этом случае задача получения РЛИ резко усложняется, поскольку отсутствие точных навигационных данных приводит к:
- расфокусировке изображения,
- появлению в изображении паразитной амплитудной модуляции,
- снижению контрастности изображения,
- нестыковке фрагментов изображения,
- появлению в изображении геометрических искажений,
- отсутствию «привязки» изображения к местности.
Технической задачей, решаемой в настоящем изобретении, является расширение функциональных возможностей БЛА, получения детальных РЛИ, повышение разрешающей способности в режиме картографирования, точности определения координат объектов в режимах разведки и целеуказания.
Для реализации поставленной задачи в беспилотном летательном аппарате, содержащем фюзеляж, в котором установлены измерительное радиоэлектронное устройство, навигационную систему, подключенную к спутниковой навигационной системе, крылья, оперение, двигатель, измерительное радиоэлектронное устройство выполняют в виде малогабаритного интегрированного двухдиапазонного радиолокатора, содержащего радиочастотный модуль (РЧМ), и бортовую цифровую вычислительную машину (БЦВМ), причем РЧМ включает двухдиапазонный антенный модуль, передатчики СВЧ и УВЧ диапазонов и приемозадающий модуль, при этом двухдиапазонный антенный модуль состоит из интегрированной апертуры двух антенных систем - антенной решетки СВЧ-диапазона и двухканальной антенны УВЧ диапазона, микроэлектромеханической бесплатформенной инерциальной системы (МЭМС БИНС), расположенной в непосредственной близости к фазовому центру интегрированной апертуры антенн, антенная решетка СВЧ-диапазона выполнена в виде волноводно-щелевой антенной решетки (ВЩАР) и соединена с двухосным приводом, выполненным с возможностью перемещения в двух плоскостях, двигатель двухосного привода антенны по оси азимута жестко закреплен снизу на монтажной платформе радиолокатора и представляет собой подвижную часть, а на оси наклона привода антенны по каналу угла места закреплена ВЩАР, двухканальная антенна УВЧ-диапазона размещена непосредственно на ВЩАР, антенны имеют суммарные и разностные входы и выходы, по осям разностных выходов антенных систем расположены многоканальный СВЧ-приемник и двухканальный УВЧ-приемник, а на осях суммарных входов-выходов антенных систем, представляющих собой первые входы и выходы, - циркулятор и коммутатор соответственно, при этом вторые выходы циркулятора и коммутатора соединены с вторыми входами СВЧ- и УВЧ-приемников соответственно, а вторые входы циркулятора и коммутатора с выходами передатчиков СВЧ- и УВЧ-диапазона волн, приемозадающий модуль содержит унифицированный приемник промежуточной частоты, двухдиапазонный синтезатор частот и синхросигналов управления, выходы приемозадающего модуля соединены с бортовой цифровой вычислительной машиной (БЦВМ), включающей интегрированный цифровой приемник, соединенный с центральным процессором, и интегрированным программным обеспечением (ИПО), первый и второй входы унифицированного приемника промежуточной частоты соединены с суммарным и разностным выходами СВЧ-приемника, третий вход с первым из выходов синтезатора частот и синхросигналов, суммарный и разностный выходы приемника промежуточной частоты соединены с первым и вторым входами интегрированного цифрового приемника, второй и третий выходы двухдиапазонного синтезатора частот и синхросигналов управления соединены с третьим и четвертым входами СВЧ-приемника, четвертый и пятый выходы СЧС к третьему и четвертому входам УВЧ-приемника, при этом шестой и седьмой выходы СЧС, обозначенные F01, соединены со вторым и третьим входами передатчика (ПРД1), восьмой и девятый выходы СЧС, обозначенные F02, соединены со вторым и третьим входами передатчика (ПРД2), десятый и одиннадцатый выходы СЧС, обозначенные FB и ТИ, соединены с третьим и четвертым входами ЦПРМ 14, к пятому и шестому входам интегрированного цифрового приемника подключены суммарный и разностный выходы УВЧ-приемника, причем «вход-выход» БЦВМ соединен по интерфейсу управления РЧМ с двухдиапазонным синтезатором частот и синхросигналов управления и двухосным приводом антенного модуля, при этом антенный модуль, выведен и установлен в обтекателе фюзеляжа в центре БЛА, при этом обтекатель выполнен радиопрозрачным, а приемозадающий модуль, приемники и передатчики СВЧ- и УВЧ-диапазонов, БЦВМ малогабаритного интегрированного двухдиапазонного радиолокатора, и навигационную систему, выполненную в виде бесплатформенной инерциальной навигационной системы, располагают на монтажной платформе, прикрепленной к корпусу беспилотного летательного аппарата внутри фюзеляжа.
Изобретение поясняется чертежом, где на
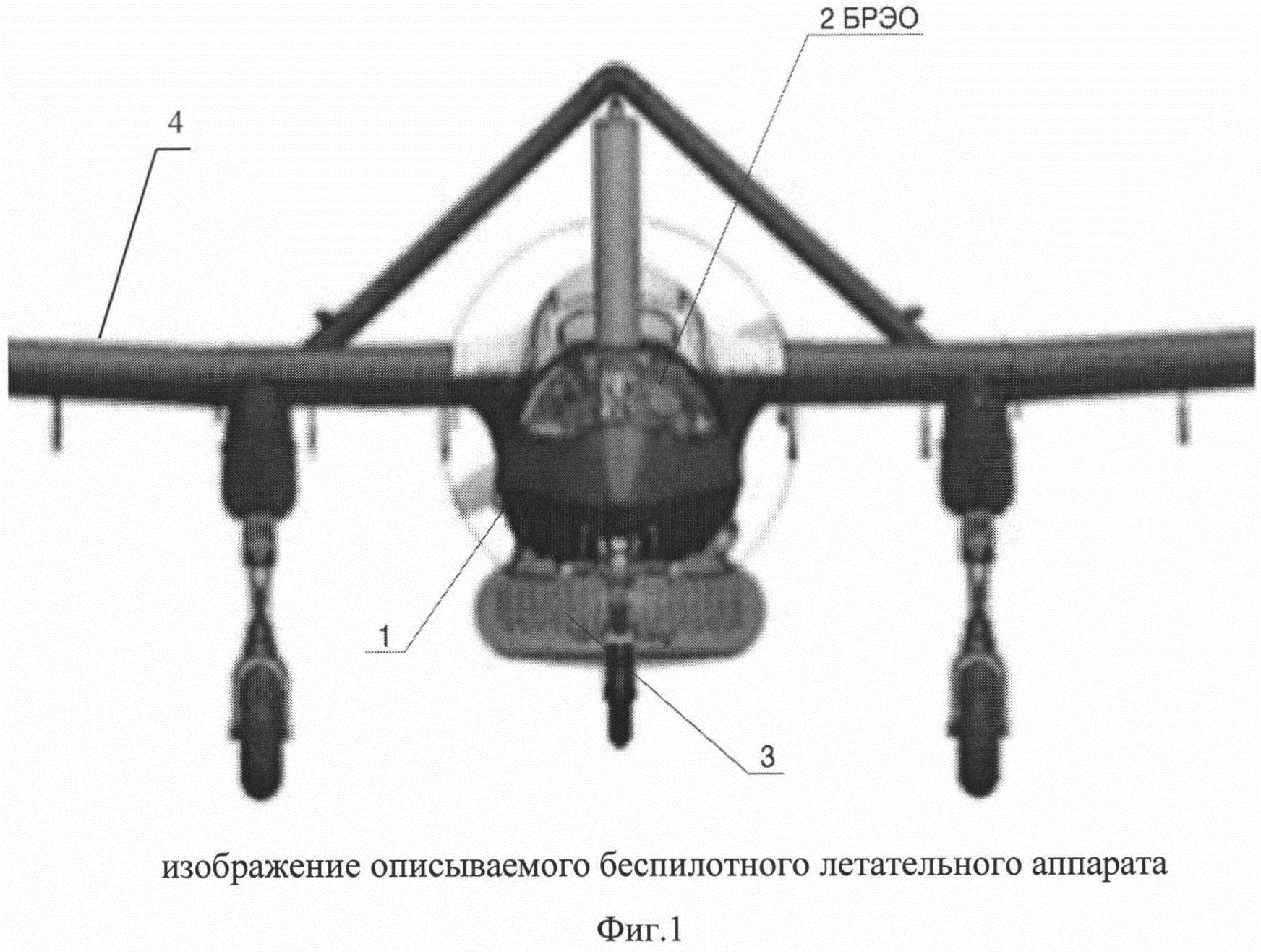
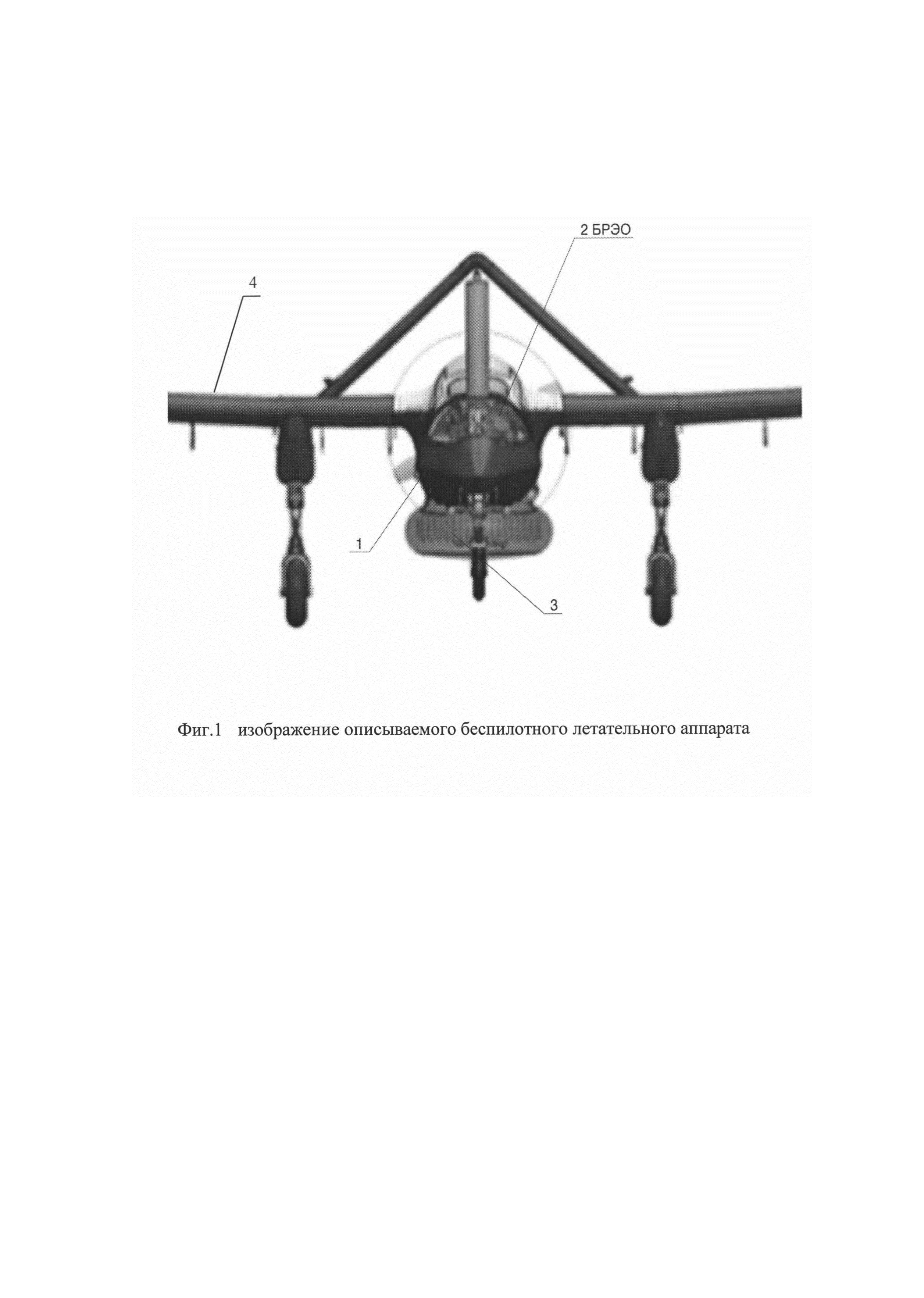
фиг. 1 дано изображение описываемого беспилотного летательного аппарата;
фиг. 2 представлена функциональная схема малогабаритного бортового радиоэлектронного оборудования;
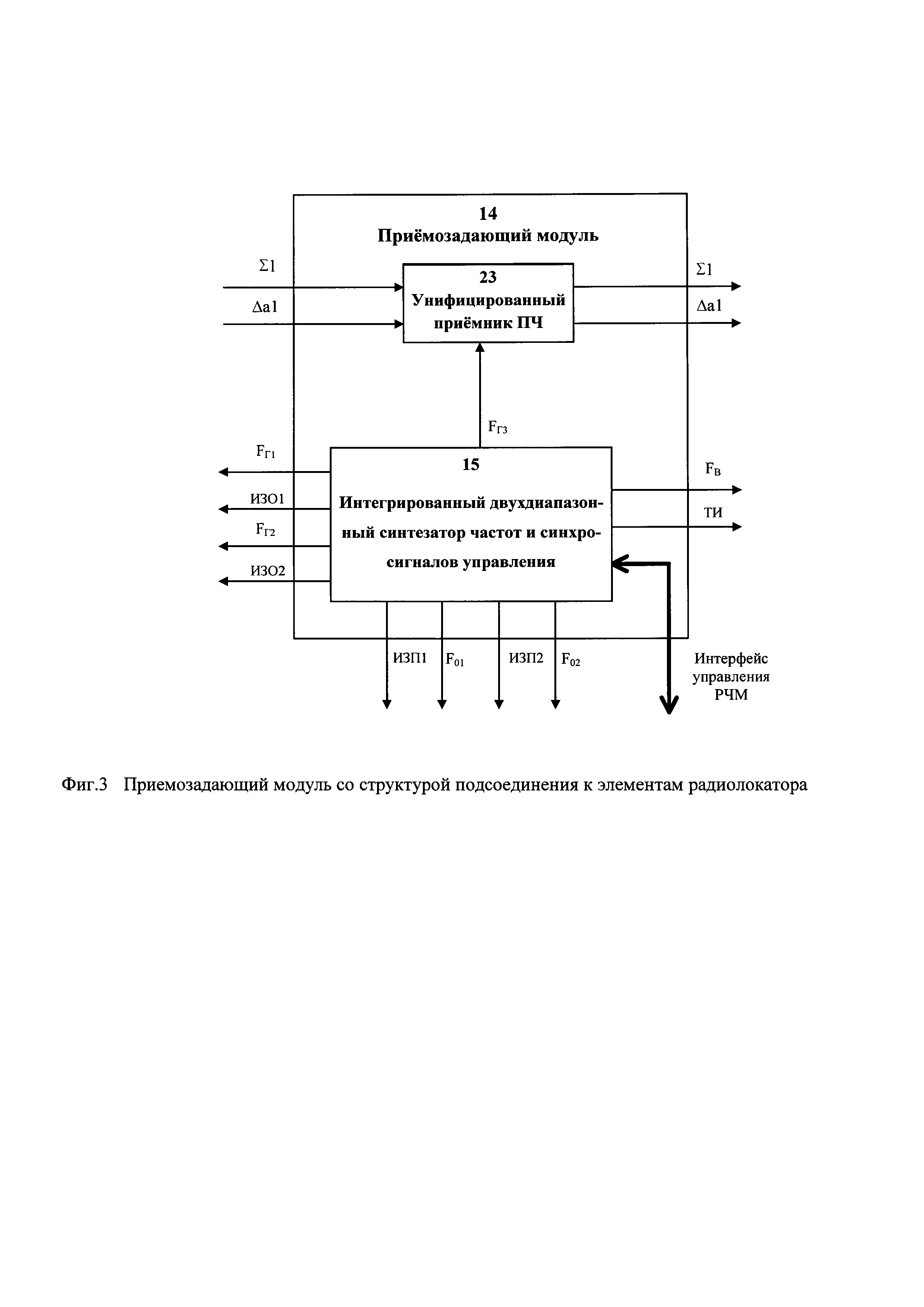
на фиг. 3 показана блок-схема приемозадающего модуля, со структурой подсоединения к элементам радиолокатора;
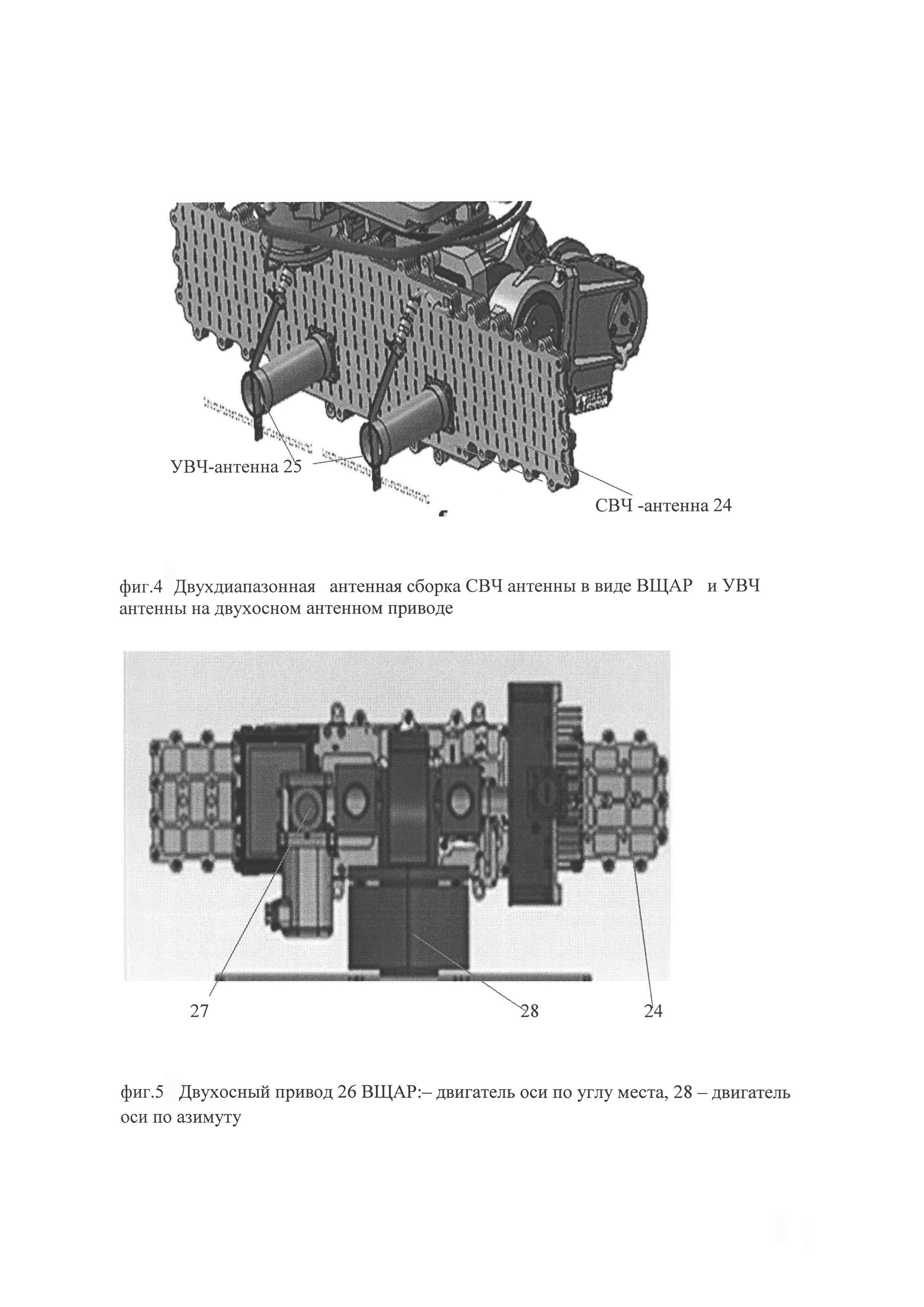
на фиг. 4 показана двухдиапазонная антенная сборка СВЧ-антенны в виде ВЩАР и УВЧ-антенны на двухосном антенном приводе;
на фиг. 5 отображен двухосный привод антенного модуля;
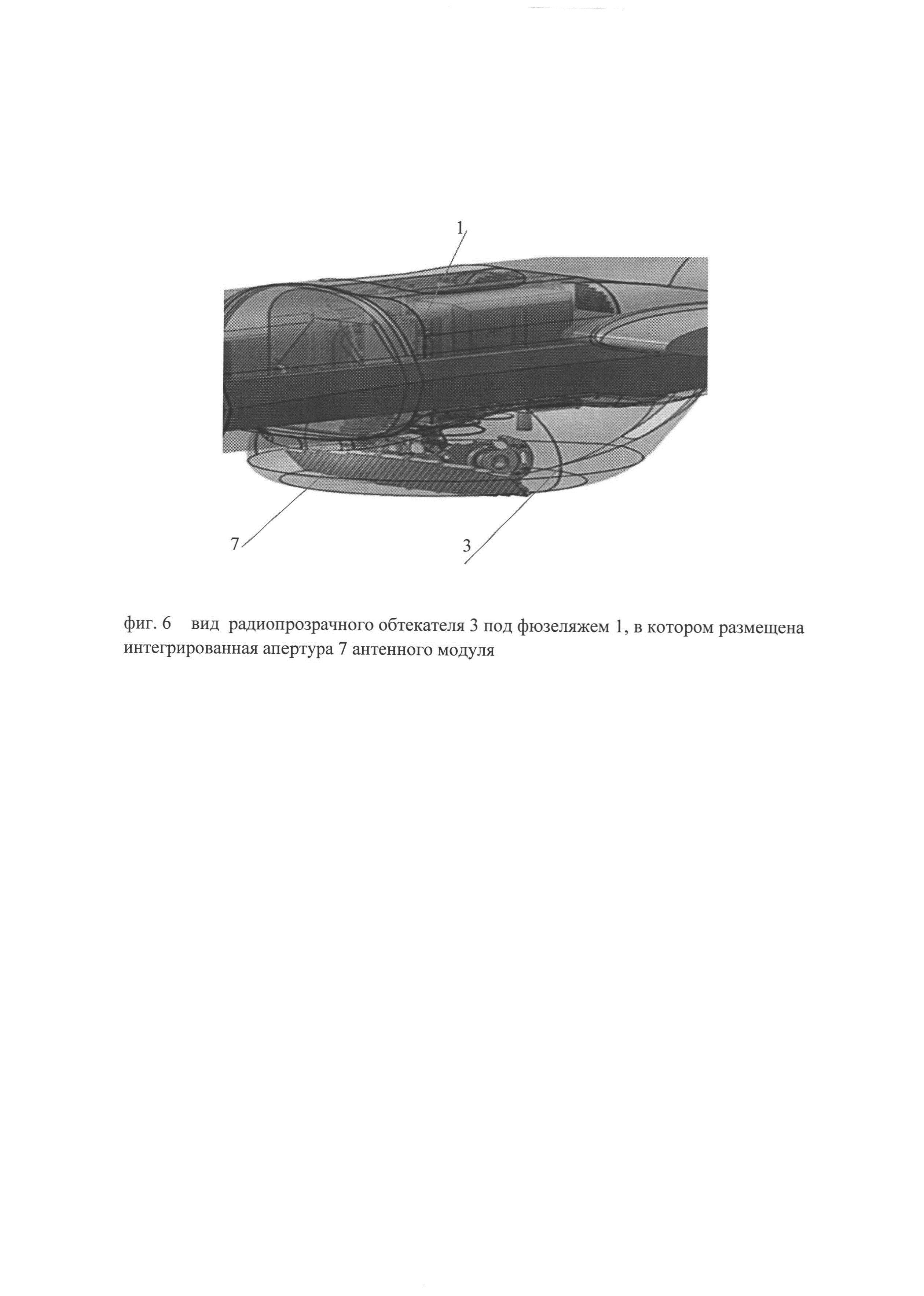
на фиг. 6 показан вид радиопрозрачного обтекателя под фюзеляжем, в котором размещена интегрированная апертура антенного модуля;
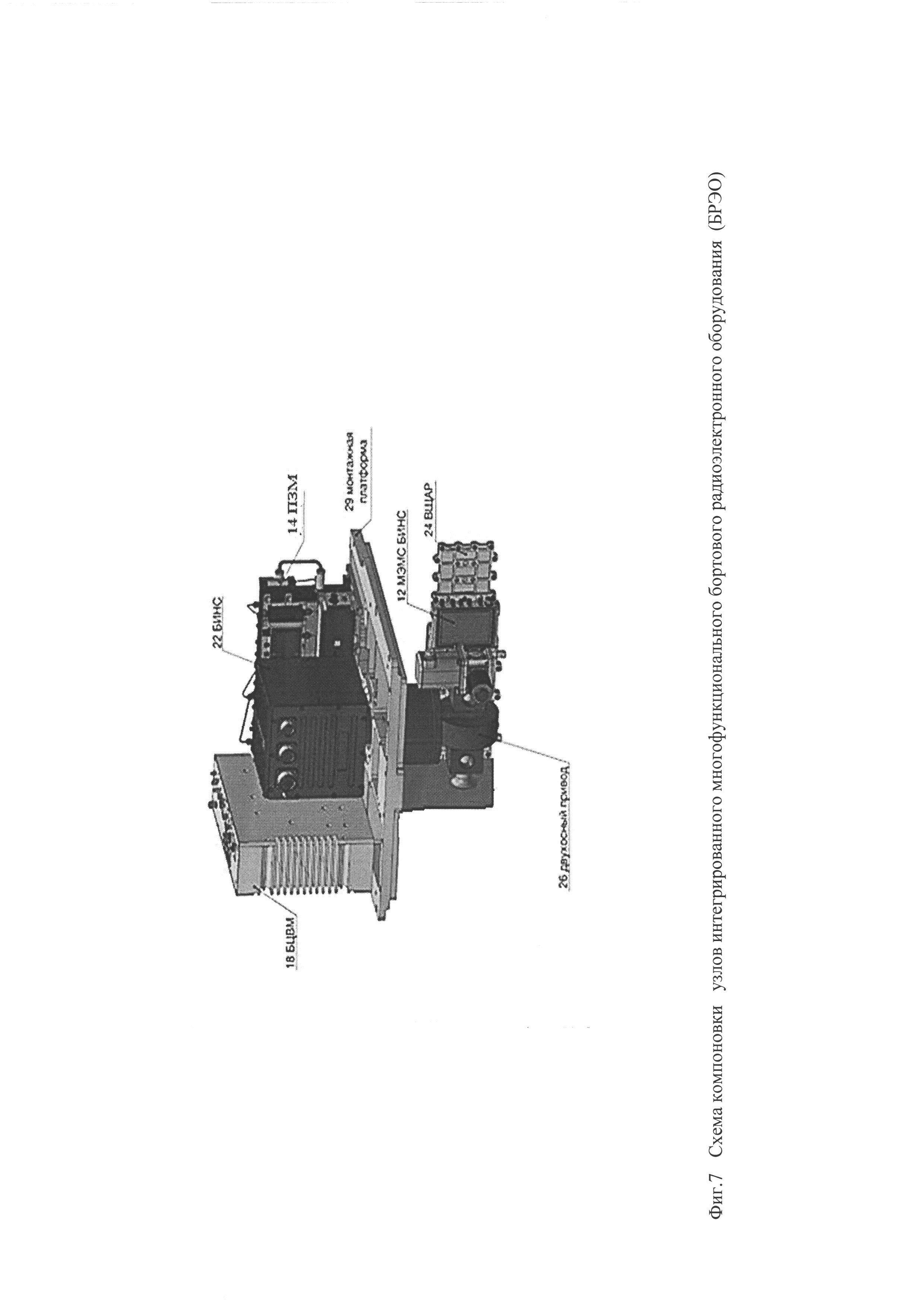
на фиг. 7 приведена схема компоновки узлов интегрированного многофункционального бортового радиоэлектронного оборудования (БРЭО);
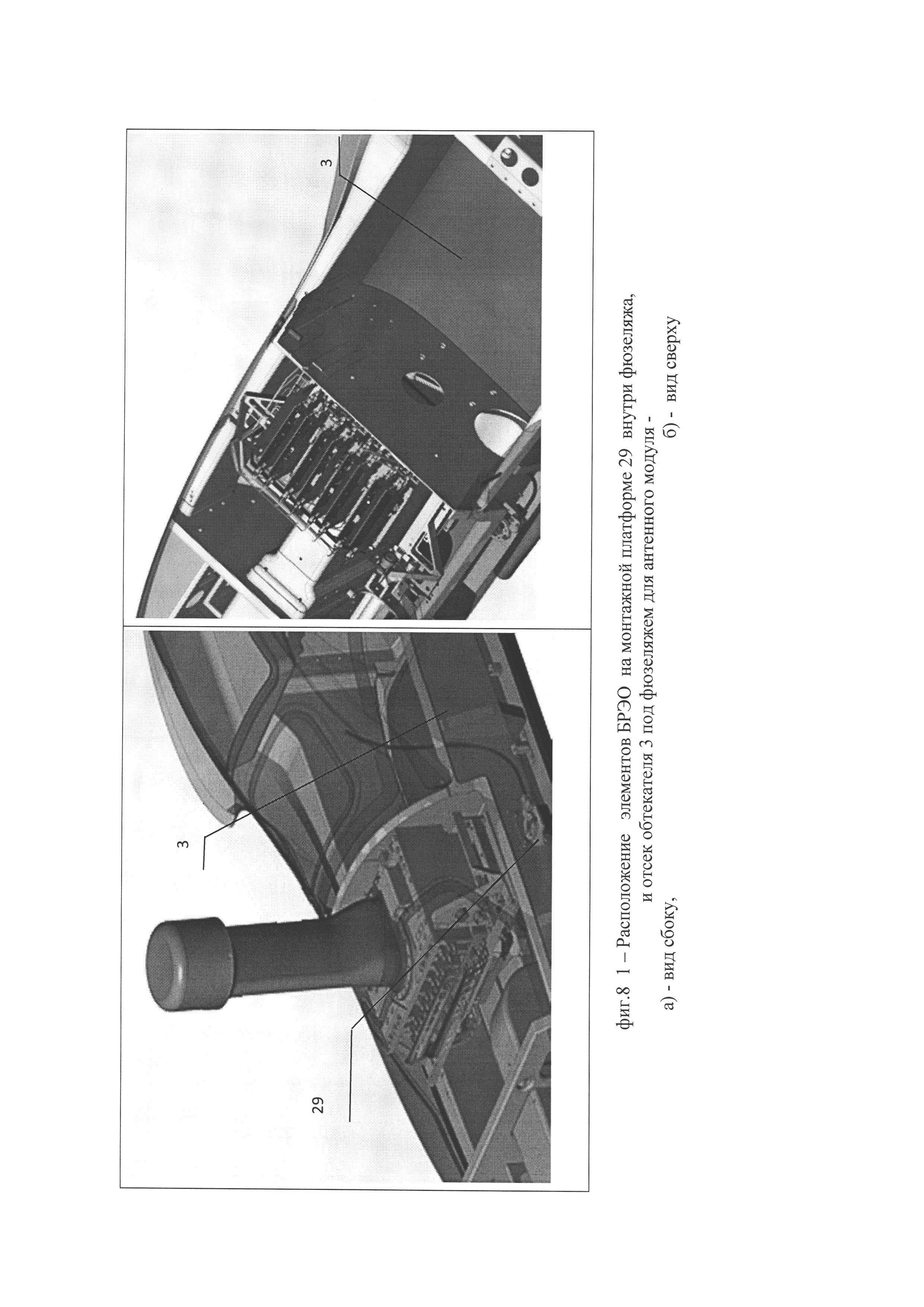
на фиг. 8 показано расположение элементов БРЭО на монтажной платформе внутри фюзеляжа и отсек обтекателя под фюзеляжем для антенного модуля, а) вид сбоку, б) вид сверху.
На чертеже обозначены: фюзеляж 1 беспилотного летательного аппарата, бортовое радиоэлектронное оборудование (БРЭО) 2, в центральной части под фюзеляжем обтекатель 3, крылья 4 (см. фиг. 1). БРЭО 2 содержит радиолокатор и навигационную систему, подключенную к спутниковой навигационной системе. Радиолокатор выполнен на базе малогабаритного интегрированного двухдиапазонного радиолокатора (фиг. 2), и содержит радиочастотный модуль (РЧМ) 5, включающий антенный модуль 6, состоящий из интегрированной апертуры 7, циркулятора 8, сверхвысокочастотного приемника (СВЧ-ПРМ) 9, ультравысокочастотного приемника (УВЧ-ПРМ) 10, коммутатора (КМТ) 11, микроэлектромеханической бесплатформенной инерциальной системы (МЭМС БИНС) - 12, установленной в непосредственной близости от интегрированной апертуры 7 антенного модуля 6, привода 13, приемозадающий модуль (ПЗМ) 14 с интегрированным двухдиапазонным синтезатором частот и синхросигналов управления (СЧС) 15, передатчик СВЧ (сантиметрового) диапазона радиоволн (ПРД1) 16, передатчик УВЧ (дециметрового) диапазона радиоволн (ПРД2) 17, и бортовую цифровую вычислительную машину (БЦВМ) 18, в которую входят интегрированный цифровой приемник (ЦПРМ) 19, соединенный с входом-выходом с центральным процессором 20, интегрированное программное обеспечение (ИПО) 21. Навигационная система БРЭО выполнена в виде бесплатформенной инерциальной системы (БИНС) 22. ПЗМ 14 включает унифицированный приемник 23 промежуточной частоты (ПЧ-ПРМ) для СВЧ (Ku- и X) диапазонов и интегрированный двухдиапазонный синтезатор частот и синхросигналов управления 15 (см. фиг. 3). Сборка антенны СВЧ-диапазона 24 выполненной в виде волоконно-щелевой антенной решетки (ВЩАР), и антенны 25 УВЧ-диапазона показана на фиг. 4); двухосный привод 26 содержит двигатели каналов по оси угла места 27 и оси по азимуту 28 (см. фиг. 5).
Интегрированная апертура 7 антенного модуля 6 включает двухканальную волноводно-щелевую антенную решетку 24 (ВЩАР) СВЧ-диапазона, с размещенными на ней вибраторами - двухканальной антенны УВЧ-диапазона 25 и двухосным приводом 26 (фиг. 4 и фиг. 5.)
Двигатель двухосного привода 26 антенны по оси азимута 28 жестко закреплен снизу на монтажной платформе 29 радиолокатора, а на оси наклона привода 27 антенны по каналу угла места закреплена ВЩАР 24. (фиг. 6). В непосредственной близости апертур антенн 24 и 25 установлена МЭМС БИНС 12. Антенный модуль 6 выведен и установлен под обтекателем 3 фюзеляжа в центральной ее части, выполненным радиопрозрачным, (фиг. 6). Сверху на монтажной платформе 29 размещены и закреплены в корпусе фюзеляжа узлы радиолокатора: ПЗМ 14, приемники 9 и 10, передатчики СВЧ 16 и УВЧ 17 диапазонов, БЦВМ 18, а также БИНС 22.
Двухдиапазонный малогабаритный радиолокатор совместно с инерциальной системой в виде БИНС, подключенной к спутниковой навигационной системе (СНС) составляет бортовое радиоэлектронное оборудование (БРЭО) Прием отраженных зондирующих сигналов сантиметрового диапазона осуществляется с помощью ВЩАР 24 по суммарному (Σ1) и разностному по азимуту (Δа1) каналам. Для передачи принимаемого ВЩАР 24 сигнала по суммарному каналу (Σ1) выход циркулятора 8 соединен с первым входом СВЧ-ПРМ 9. Для передачи принимаемого сигнала по каналу, разностному по азимуту (Δa1), второй выход ВЩАР 24 соединен со вторым входом СВЧ-ПРМ 9.
Прием отраженных зондирующих сигналов УВЧ-диапазона осуществляется с помощью антенного устройства УВЧ-диапазона 25 по суммарному (Σ2) и разностному по азимуту (Δа2) каналам. Для передачи принимаемого антенным устройством сигнала по суммарному каналу (Σ2) выход коммутатора 11 соединен с первым входом УВЧ-ПРМ 10. Для передачи принимаемого сигнала по каналу, разностному по азимуту (Δа2), второй выход антенного устройства УВЧ-диапазона 25 соединен со вторым входом УВЧ-приемника 10.
При синтезе апертуры радиолокатора возникает необходимость компенсации искажений комбинированного изображения из-за траекторных нестабильностей, связанных с отклонением БЛА от прямолинейного движения. Траекторные нестабильности на интервале обзора могут быть определены с помощью МЭМС БИНС 12, размещенной вблизи фазового центра интегрированной апертуры 7 антенного модуля 6. Для компенсации указанных нестабильностей их оценки вносятся в поправки к сигналам радиолокатора.
МЭМС БИНС 12 интегрирована в единый комплекс с приводом антенны ВЩАР с возможностью движения по азимуту и углу места и составляет подсистему стабилизации двухосным приводом.
В основе организации описываемого интегрированного двухдиапазонного радиолокатора лежит программный способ управления режимами и параметрами радиолокатора, реализуемый ИПО 21 БЦВМ 18, - обеспечивающей работу составных частей радиолокатора с разделением во времени в каждом такте. При этом все внутренние и внешние сигналы СЧС синхронизированы единым сигналом с запрограммированным на исполнение функций цифрового автомата, управляемого от БЦВМ 18, который формирует в режиме реального времени цифровые квадратурные сигналы.
При работе СЧС 15 в режиме формирования сигналов СВЧ-диапазона формируется сигнал излучения F01.
При работе СЧС 15 в режиме формирования сигналов УВЧ-диапазона формируется сигнал несущей F02 УВЧ-диапазона.
Функционирование двухдиапазонного радиолокатора выполняется следующим образом (см. фиг. 2-3). В каждом тактовом интервале (ТИ) работы радиолокатора в центральном процессоре 20 БЦВМ 18 под управлением ИПО 21 вычисляются параметры, используемые для управления в последующем такте модулями СЧС 15, интегрированным ЦПРМ 19 и приводом 13, для чего «вход-выход» БЦВМ 18 соединен по интерфейсу управления РЧМ с СЧС 15 и приводом 13, с МЭМС БИНС 12, и БИНС 22, (фиг. 2 и фиг. 3) а «вход-выход» центрального процессора 20 соединен с интегрированным ЦПРМ 19. В соответствии с заданными параметрами управления интегрированный СЧС 15 формирует сигналы несущих частот F01 и F02. При этом выход СЧС 15, обозначенный F01, соединен со вторым входом передатчика (ПРД1) 16, выход СЧС, обозначенный F02, соединен со вторым входом передатчика (ПРД2) 17, выход СЧС, обозначенный FГ1, соединен с третьим входом СВЧ-ПРМ 9, выход, обозначенный FГ2, соединен с третьим входом УВЧ-ПРМ 10, выход, обозначенный ИЗП1, соединен с первым входом ПРД1 16, выход, обозначенный ИЗП2, соединен с первым входом ПРД2 17, выход, обозначенный ИЗО1, соединен с четвертым входом СВЧ-ПРМ 9, выход, обозначенный ИЗО2, соединен с четвертым входом УВЧ-ПРМ 10, а выходы СЧС, обозначенные FВ и ТИ, соединены с третьим и четвертым входами ЦПРМ 19.
Излучение зондирующих сигналов производится по суммарным Σ1 и Σ2 каналам интегрированной апертуры 7, для чего выход передатчика (ПРД1) 16 соединен с входом циркулятора 8, «вход-выход» которого соединен с суммарным каналом ВЩАР 24, а выход передатчика (ПРД2) 17 соединен с коммутатором 7, управление которым производится от СЧС 15 сигналом ИЗП2, а «вход-выход» которого соединен с суммарным каналом УВЧ-антенны 25.
Основная навигационная система БЛА реализована в виде бесплатформенного блока чувствительных элементов БИНС, назначением которого является измерение практически непрерывное (с частотой более 200 Гц) угловых скоростей и ускорений в связанной с БЛА системе координат. Данные об измеренных угловых скоростях и ускорениях поступают БЦВМ 18, где производится вычисление геометрических координат центра масс БЛА, составляющих путевой скорости и углов пространственного положения центра масс БЛА относительно нормальной земной системы координат (НЗСК). Поскольку антенный модуль 6 малогабаритного двухдиапазонного радиолокатора, удален от центра масс БЛА, а также учитывая траекторные нестабильности на интервале обзора, вызванных движениями двигателей привода 27 и 28, необходимым является приведение их в соответствие с навигационными параметрами и параметрами ориентации интегрированной апертуры 7 антенного модуля 6 (фазового центра антенн - ФЦА). Для решения указанной задачи в непосредственной близи фазового центра масс размещают малогабаритную микроэлектромеханическую бесплатформенную навигационную систему МЭМС БИНС 12, которая измеряет угловые скорости и ускорения ФЦА (либо площадки вблизи ФЦА), на которой закреплена МЭМС БИНС 12. Данные измерений МЭМС БИНС 12 также поступают в БЦВМ 18.
Для коррекции ошибок счисления координат и составляющих путевой скорости по измерениям основной БИНС 22, в БЦВМ 18 поступают данные о координатах и путевой скорости в земной системе координат с выхода приемника глобальной спутниковой инерциальной системы. На основании трех данных векторов параметров навигации и ориентации:
- вектора положения НЗСК относительно земной инерциальной системы координат;
- векторов параметров навигации и ориентации центра масс БЛА относительно НЗСК;
- вектора параметров ориентации и навигации ФЦА относительно центра масс БЛА в БЦВМ осуществляется вычисление параметров навигации и ориентации ФЦА в земной инерциальной системе координат.
Тогда пользуясь измерениями дальности, угла места и угла азимута сканируемого участка земной поверхности с помощью двухдиапазонного радиолокатора в БЦВМ 18 вычисляют координаты сканируемого участка земной поверхности. При этом по данным, получаемым от БИНС, в двухдиапазонном радиолокаторе в реальном масштабе времени осуществляется управление лучом антенны, периодом повторения зондирующих импульсов, положением зоны приема и параметрами опорных функций.
БИНС 22, комплексированная с приемником глобальной навигационной спутниковой системы (ГНСС) (на чертеже не показано), установлена на общей монтажной платформе 29 с элементами и узлами малогабаритного двухдиапазонного радиолокатора, в которой предусмотрены посадочные места для ПЗМ 14 приемников 9 и 10 и передатчиков СВЧ диапазона 16 и УВЧ диапазона 17, БЦВМ 18, и расположены внутри фюзеляжа. Антенный модуль 6, выполненный в виде малогабаритных антенн совместно с миниатюрным МЭМС БИНС, выведен и установлен в обтекателе фюзеляжа в центре БЛА, выполненным радиопрозрачным. Таким образом, миниатюризация блоков и раздельное их расположение позволяет уменьшить массогабаритные показатели и при оперативной работе достигается повышение точности определения координат, получение детальных радиолокационных изображений непосредственно на борту БЛА в реальном масштабе времени без какого-либо вмешательства оператора в процесс обработки радиолокационной информации.
Такая архитектура обеспечивает решение всех задач многофункционального комплекса, легко адаптируясь для использования не только на БЛА, но и вообще на широком классе ЛА. Легкость адаптации заключена в модульности построения и использования стандартных интерфейсов в аппаратной и программной подсистемах.
Беспилотный летательный аппарат, содержащий фюзеляж, в котором установлены измерительное радиоэлектронное устройство, навигационная система, подключенная к спутниковой навигационной системе, крылья, оперение, двигатель, отличающийся тем, что измерительное радиоэлектронное устройство выполнено в виде малогабаритного интегрированного двухдиапазонного радиолокатора, содержащего радиочастотный модуль (РЧМ) и бортовую цифровую вычислительную машину (БЦВМ), причем РЧМ включает двухдиапазонный антенный модуль, передатчики СВЧ- и УВЧ-диапазонов и приемозадающий модуль, при этом двухдиапазонный антенный модуль состоит из интегрированной апертуры двух антенных систем - антенной решетки СВЧ-диапазона и двухканальной антенны УВЧ диапазона - и микроэлектромеханической бесплатформенной инерциальной системы (МЭМС БИНС), расположенной в непосредственной близости к фазовому центру интегрированной апертуры антенн, антенная решетка СВЧ-диапазона выполнена в виде волноводно-щелевой антенной решетки (ВЩАР) и соединена с двухосным приводом, выполненным с возможностью перемещения в двух плоскостях, двигатель двухосного привода антенны по оси азимута жестко закреплен снизу на монтажной платформе радиолокатора и представляет собой подвижную часть, а на оси наклона привода антенны по каналу угла места закреплена ВЩАР, двухканальная антенна УВЧ-диапазона размещена непосредственно на ВЩАР, антенны имеют суммарные и разностные входы и выходы, по осям разностных выходов антенных систем расположены многоканальный СВЧ-приемник и двухканальный УВЧ-приемник, а на осях суммарных входов-выходов антенных систем, представляющих собой первые входы и выходы, установлены циркулятор и коммутатор соответственно, при этом вторые выходы циркулятора и коммутатора соединены со вторыми входами СВЧ- и УВЧ-приемников соответственно, а вторые входы циркулятора и коммутатора - с выходами передатчиков СВЧ- и УВЧ-диапазона волн, приемозадающий модуль содержит унифицированный приемник промежуточной частоты, двухдиапазонный синтезатор частот и синхросигналов управления, выходы приемозадающего модуля соединены с бортовой цифровой вычислительной машиной (БЦВМ), включающей интегрированный цифровой приемник, соединенный с центральным процессором и интегрированным программным обеспечением (ИПО), первый и второй входы унифицированного приемника промежуточной частоты соединены с суммарным и разностным выходами СВЧ-приемника, третий вход с первым из выходов синтезатора частот и синхросигналов, суммарный и разностный выходы приемника промежуточной частоты соединены с первым и вторым входами интегрированного цифрового приемника, второй и третий выходы двухдиапазонного синтезатора частот и синхросигналов управления соединены с третьим и четвертым входами СВЧ-приемника, четвертый и пятый выходы СЧС подключены к третьему и четвертому входам УВЧ-приемника, при этом шестой и седьмой выходы СЧС, обозначенные F, соединены со вторым и третьим входами передатчика СВЧ диапазона (ПРД1), восьмой и девятый выходы СЧС, обозначенные F, соединены со вторым и третьим входами передатчика УВЧ диапазона (ПРД2), десятый и одиннадцатый выходы СЧС, обозначенные F и ТИ, соединены с третьим и четвертым входами интегрированного цифрового приемника (ЦПРМ 14), к пятому и шестому входам интегрированного цифрового приемника подключены суммарный и разностный выходы УВЧ-приемника, причем «вход-выход» БЦВМ соединен по интерфейсу управления РЧМ с двухдиапазонным синтезатором частот и синхросигналов управления и приводом антенного модуля, при этом антенный модуль выведен и установлен в обтекателе фюзеляжа в центре БЛА, при этом обтекатель выполнен радиопрозрачным, а приемозадающий модуль, приемники и передатчики СВЧ- и УВЧ-диапазонов, БЦВМ и инерциальная навигационная система, выполненная в виде бесплатформенной инерциальной навигационной системы, расположены на единой монтажной платформе, прикрепленной к корпусу беспилотного летательного аппарата внутри фюзеляжа.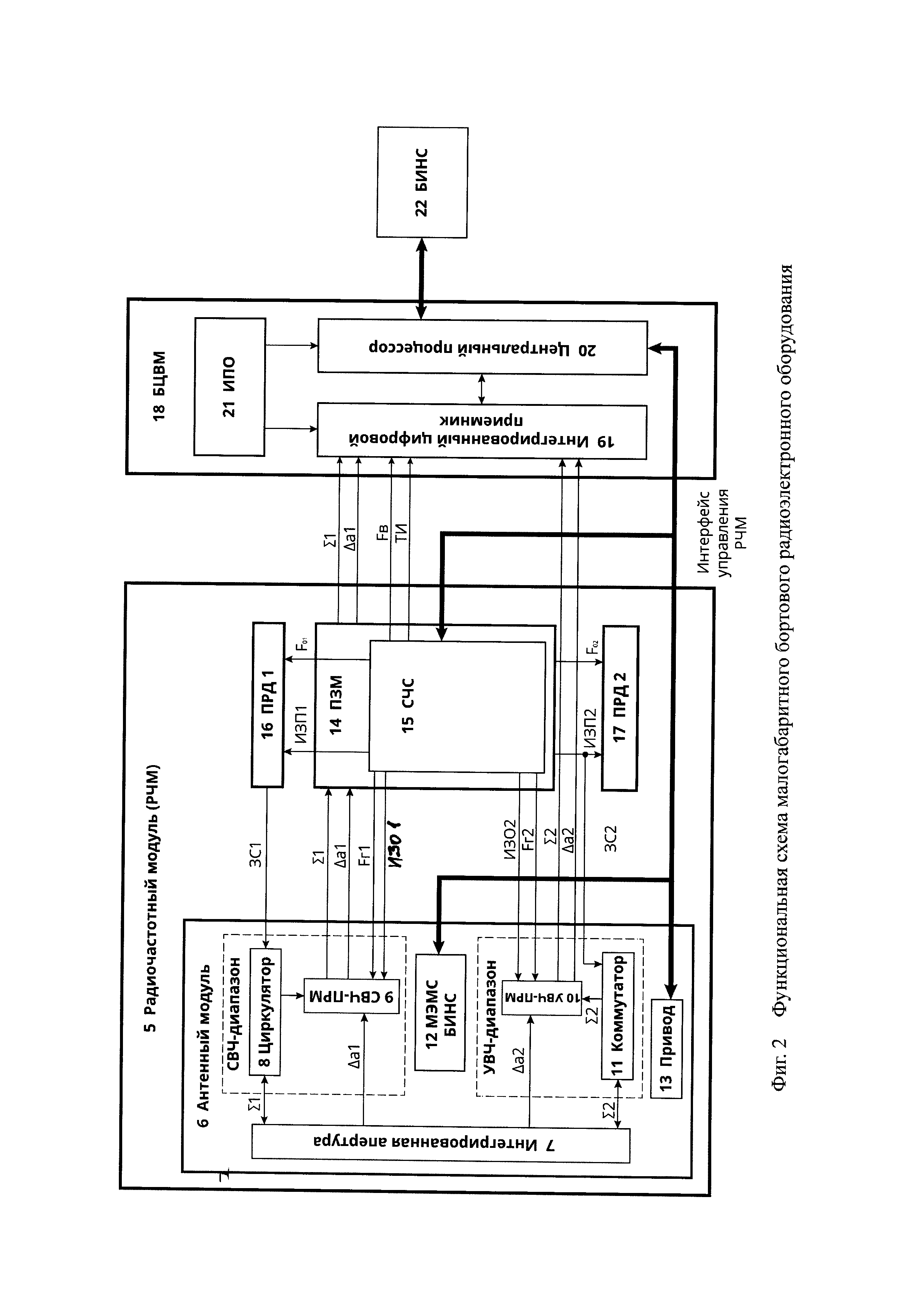
Способ оценки чистоты воздуха гермокабин летательных аппаратов, поступающего от компрессоров газотурбинных двигателей, на содержание продуктов разложения смазочных масел
Промежуточный ковш для разливки стали с камерами для плазменного подогрева жидкого металла
Сталь
Система управления летным экспериментом
Устройство для отделения частиц от жидкости
Способ электрошлакового переплава
Устройство для сжигания топлива
Высокопрочная сталь
Способ селективной каталитической очистки выхлопных и топочных газов от оксидов азота
Самолет местных воздушных линий
Когерентный приемник рлс с цифровым устройством для амплитудной и фазовой корректировки квадратурных составляющих принимаемого сигнала
Волноводный распределитель для фар с оптимизированными характеристиками излучения
Бортовая система беспилотного летательного аппарата (бла) с автономной коррекцией координат

