Результат интеллектуальной деятельности: Пневматический привод, система и способ управления пневматическим приводом
Вид РИД
Изобретение
Настоящее изобретение относится к пневматическому приводу, системе и способам управления пневматическим приводом преимущественно в транспортных средствах.
Известен реечно-зубчатый исполнительный механизм (патент RU №2446322 от 23.06.2010) с приводом рейки от пневмоцилиндра двойного действия; вал механизма с зубчатым сектором может совершать возвратно-вращательные движения на угол, не превышающий угол зубчатого сектора. Зубчатая рейка одним концом опирается на шток пневмоцилиндра, а другим - на ролик, закрепленный в корпусе под рейкой.
Известен электропневматический привод, управляемый нормально закрытыми пневмоклапанами с электромагнитным управлением (ЭМУ) (патент RU №2486072 от 10.11.2011), имеющий пневмоцилиндр (ПЦ) с корпусом, внутри которого имеются три полости. В центральной полости расположена рейка, на концах которой имеются штоки, входящие в две другие полости ПЦ, в крышках которых установлены соосно со штоками управляемые упоры, каждый из которых приводится двухпозиционным ПЦ. В центральной полости перпендикулярно оси ПЦ расположен выходной вал с шестерней, взаимодействующей с зубчатой рейкой. На выходном валу закреплен рычаг, который при перемещении рейки при подаче воздуха в одну из штоковых полостей может занимать несколько угловых положений. Такой электропневматический привод используется для переключения передач в коробке передач транспортного средства.
Известно поворотное устройство (патент RU №2540201 от 15.04.2010), имеющее корпус, поршень с зубчатыми рейками внутри полости корпуса, вал с шестерней внутри полости корпуса, опирающийся на стенки корпуса, шестерня которого взаимодействует с рейками и вращает вал.
Недостаток известных изобретений поворотных устройств управления с пневматическими приводами - отсутствие в них системы управления, обеспечивающих надежность и быстродействие.
Известна система управления (патент JP №61124750 от 19.11.1984) (пневматическим) приводом, содержащая цилиндр с поршнем и штоком, четыре двухпозиционных клапана с ЭМУ, подающих и выпускающих рабочую среду из полостей цилиндра, магистраль и датчиком давления, соединяющую источник давления рабочей среды с четырьмя клапанами, датчик положения штока, контроллер, электрически соединенный с электромагнитами клапанов, непрерывно сравнивающий положение штока относительно корпуса с заданным положением, на основе сохраняемой в нем программы, и совершающий вблизи от заданного положения штока переход клапанов на дросселирование рабочей среды для медленного приближения штока к заданному программой положению.
Недостаток - отсутствие в системе стопоров, задающих положение стопоров поршня и штока.
Известна система управления пневмоприводом с электронным блоком управления (заявка CN №104500717А от 04.09.2014), имеющим микропроцессор, модуль широтно-импульсной модуляции (ШИМ-модуль), пневмоклапаны с электромагнитным управлением, модуль обработки входящих и выходящих сигналов, реализующий программу управления пневмоприводом в соответствии с заданным алгоритмом управления, а также способ управления коробкой передач транспортного средства, в котором после начала работы микропроцессор через модули от датчиков получает информацию о состоянии управляемого объекта, а затем от микропроцессора поступает информация на модуль управления электромагнитами пневмоклапанов для совершения пневмоприводом управляющих действий.
Недостаток данной системы и способа управления - повышенный расход электроэнергии на управление электромагнитами пневмоклапанов.
Известна система управления пневматическим цилиндром коробки переключения передач (патент CN №2029270234 от 21.11.2012), в которой положением поршня со штоком и двумя поршнями, плавающими относительно корпуса цилиндра, управляют пневматические клапаны с высокочастотными электромагнитами на основе данных, получаемых от датчика положения при реализации задачи позиционирования через электрические импульсы, передаваемые от ШИМ-источника к электромагнитам пневматических клапанов.
Недостаток системы - сложность конструкции пневматического цилиндра и отсутствие надежной фиксации положений поршня со штоком и, как следствие, пониженная надежность пневматического привода и системы управления.
Известен пневматический привод (ПП), система с электронным блоком и способ управления ПП (патент RU №2473824 от 10.11.2009), в котором ПП имеет: главный пневмоцилиндр (ГПЦ) с корпусом, закрытым крышками и с полостью внутри корпуса, с установленными в корпусе и присоединенными к поршню, делящему полость ГПЦ на левую и правую полости подвижными частями; датчик положения подвижных частей; управляющий механизм, присоединенный к поршню и соединенный с управляемым внешним узлом, например, с коробкой переключения передач транспортного средства.
Недостаток данного ПП в том, что он служит для привода управляющего механизма, совершающего возвратно-поступательное движение, и не приспособлен для привода механизма, совершающего возвратно-вращательное движение.
Система управления ПП по патенту RU №2473824 содержит источник давления воздуха, пневмомагистраль, соединенную с источником давления воздуха, с установленным в ней датчиком давления, первый двухпозиционный нормально закрытый пневмоклапан с ЭМУ, управляющий положением поршня ГПЦ, вход которого присоединен к пневмомагистрали, а выход соединен с правой полостью ГПЦ, соединяемой с атмосферой при выключенном ЭМУ, второй двухпозиционный нормально закрытый пневмоклапан с ЭМУ, управляющий положением поршня ГПЦ, вход которого подсоединен к пневмомагистрали, а выход - к левой полости ГПЦ, соединяемой с атмосферой при выключенном ЭМУ, электронный блок управления (ЭБУ), электрически соединенный с возможностью передачи управляющих сигналов на ЭМУ первого и второго пневмоклапанов через линии связи и с возможностью получать сигналы от датчика положения подвижных частей.
Недостаток данной СУ - в пониженной надежности вследствие того, что в ней отсутствуют элементы, обеспечивающие надежную фиксацию положений подвижных частей ПП для исключения неуправляемого изменения положения выходного элемента при случайных или периодических (например, вибрации и удары) внешних воздействиях.
Система управления ПП реализует способ управления ПП по патенту RU №2473824, включающий только ШИМ-управление электромагнитами, при котором воздух подают в одну из полостей ГПЦ в виде импульсных воздействий давления воздуха на поршень на всем пути перемещения поршня или в обе полости ГПЦ в виде разности импульсных воздействий давления воздуха на поршень.
Недостаток способа управления ПП при ШИМ-управлении - в пониженном быстродействии ПП вследствие инерционности подвижных частей ПП и якорей электромагнитов.
Техническая задача, решаемая изобретением, - повышение надежности и быстродействия пневматического привода и системы управления пневматическим приводом, а также - снижение энергозатрат на работу пневмопривода и системы управления.
Техническая задача решена в пневматическом приводе, системе и способе управления пневматическим приводом, которые связаны единым изобретательским замыслом, обеспечивающим повышение быстродействия и надежности пневматического привода и системы управления им.
Пневматический привод имеет главный пневмоцилиндр (ГПЦ) с корпусом, закрытым крышками, и с полостью внутри корпуса, с установленными в корпусе подвижными частями: с поршнем внутри корпуса, делящим полость ГПЦ на левую и правую полости, с зубчатой рейкой, закрепленной на поршне с возможностью перемещения вместе с поршнем, с выходным валом, ось которого перпендикулярна оси ГПЦ, и опирающимся на корпус ГПЦ, по меньшей мере, один конец которого выступает из корпуса, и зубчатой шестерней на выходном валу внутри корпуса, зубья которой взаимодействуют с зубьями рейки; датчик положения подвижных частей; управляющий механизм, соединенный с выступающим из корпуса концом выходного вала, при этом на конце выходного вала, выступающего из корпуса, установлен диск с трапециевидными вырезами, количество которых равно заданному числу угловых положений выходного вала с диском, и многопозиционный командоаппарат в качестве управляющего механизма, на корпусе ГПЦ расположенный датчик положения подвижных частей, взаимодействующий с диском с трапециевидными вырезами, являющийся датчиком угловых положений диска; на корпусе ГПЦ расположены: первый стопор с конусообразным концом с приводом от первого ПЦ одностороннего действия, взаимодействующий с трапециевидными вырезами на диске служащий для фиксирования углового положения выходного вала и выходящий из взаимодействия при подаче команды на изменение положения выходного вала; второй стопор с конусообразным концом, взаимодействующий с трапециевидными вырезами на диске, с приводом от второго ПЦ одностороннего действия.
Описанным выше ПП управляет присоединенная к нему система управления, содержащая источник давления воздуха, пневмомагистраль, соединенную с источником давления воздуха, с установленным в ней датчиком давления, первый двухпозиционный нормально закрытый пневмоклапан с электромагнитом, управляющий положением поршня ГПЦ, вход которого присоединен к пневмомагистрали, а выход соединен с правой полостью ГПЦ, соединяемой с атмосферой при выключенном электромагнитным управлением, второй двухпозиционный нормально закрытый пневмоклапан с электромагнитом, управляющий положением поршня ГПЦ, вход которого подсоединен к пневмомагистрали, а выход - к левой полости ГПЦ, соединяемой с атмосферой при выключенном электромагните; ЭБУ, электрически соединенный с возможностью передавать сигнал на электромагниты первого и второго пневмоклапанов через линии связи, с возможностью получать сигнал от датчика положения;
при этом система управления имеет третий двухпозиционный нормально закрытый управляемый электромагнитом пневмоклапан, вход которого соединен с пневмомагистралью, а выход - со штоковой полостью ПЦ первого стопора с конусообразным концом, служащий для изменения положения первого стопора с конусообразным концом относительно трапециевидных вырезов диска, четвертый двухпозиционный нормально закрытый управляемый электромагнитом пневмоклапан, вход которого соединен с пневмомагистралью, а выход - со штоковой полостью ПЦ второго стопора с конусообразным концом, служащий для изменения положения второго стопора с конусообразным концом относительно трапециевидных вырезов диска, датчики положения первого и второго стопоров с конусообразными концами, относительно трапециевидных вырезов диска, при этом ЭБУ электрически дополнительно соединен с электромагнитами управления третьего и четвертого пневмоклапанов, с датчиком угловых положений диска с трапециевидными вырезами, с датчиками положения первого и второго стопоров с конусообразными концами диска относительно трапециевидных вырезов, с датчиком давления воздуха, установленным в пневмомагистрали.
Системой управления осуществляется способ управления ПП, при котором воздух подают в одну из полостей ГПЦ в зависимости от положения подвижных частей ГПЦ при определении их положения, при этом определяют текущее угловое положение диска с трапециевидными вырезами, и стопоров с конусообразными концами диска относительно трапециевидных вырезов, вводят первый и второй стопоры с конусообразными концами в вырезы диска и обезвоздушивают левую и правую полости ГПЦ, задают направление и величину целевого углового положения трапециевидных вырезов диска относительно первого и второго стопоров с конусообразными концами, задают величину текущего угла поворота диска с трапециевидными вырезами, составляющего 0,5…0,8 от целевого угла поворота, подают сигналы управления в электромагниты четвертого и третьего пневмоклапанов для вывода второго и первого стопоров с конусообразными концами из вырезов диска, в электромагниты первого или второго пневмоклапанов для поворота диска на величину заданного текущего угла путем подачи воздуха в правую или левую полости ГПЦ, переключают ЭБУ на ШИМ-управление после достижения заданного текущего угла поворота диска с трапециевидными вырезами, осуществляют поворот диска до заданного целевого угла, определяя с помощью датчика углового положения диска его позицию в процессе поворота подачей воздуха в одну из полостей ГПЦ в виде одного или более импульсов, служащих для перемещения поршня в заданном направлении. После достижения заданного целевого углового положения диска выполняют обезводушивание левой и правой полостей ГПЦ путем подачи сигналов управления от ЭБУ на выключение электромагнитов первого и второго пневмоклапанов. Подают сигналы от ЭБУ на электромагниты третьего и четвертого пневмоклапанов управления положением поршней ПЦ для ввода первого и второго стопоров с конусообразными концами в противолежащие трапециевидные вырезы диска.
Техническая задача, решаемая изобретением, - повышение надежности и быстродействия пневматического привода и системы управления пневматическим приводом, а также снижение энергозатрат на работу пневмопривода и системы управления, - достигается за счет совокупности следующих отличительных признаков ПП: на конце выходного вала, выступающего из корпуса, установлен диск с трапециевидными вырезами, количество которых равно заданному числу угловых положений выходного вала с диском, и многопозиционный командоаппарат в качестве управляющего механизма, на корпусе ГПЦ расположен датчик положения подвижных частей, взаимодействующий с диском с трапециевидными вырезами, являющийся датчиком угловых положений диска; на корпусе ГПЦ расположены: первый стопор с конусообразным концом с приводом от первого ПЦ одностороннего действия, взаимодействующий с трапециевидными вырезами на диске, служащий для фиксирования углового положения выходного вала и выходящий из взаимодействия при подаче команды на изменение положения выходного вала; второй стопор с конусообразным концом, взаимодействующий с трапециевидными вырезами на диске, с приводом от второго ПЦ одностороннего действия.
Решение технической задачи достигается за счет следующей совокупности отличительных признаков системы управления:
третий двухпозиционный нормально закрытый управляемый электромагнитом пневмоклапан, вход которого соединен с пневмомагистралью, а выход - со штоковой полостью ПЦ первого стопора с конусообразным концом, служащим для изменения положения первого стопора с конусообразным концом относительно трапециевидных вырезов диска; четвертый двухпозиционный нормально закрытый управляемый электромагнитом пневмоклапан, вход которого соединен с пневмомагистралью, а выход - со штоковой полостью ПЦ второго стопора с конусообразным концом, служащий для изменения положения второго стопора с конусообразным концом относительно трапециевидных вырезов диска; датчики положения первого и второго стопоров с конусообразными концами, относительно трапециевидных вырезов диска, при этом ЭБУ электрически дополнительно соединен с электромагнитами управления третьего и четвертого пневмоклапанов, с датчиком угловых положений диска с трапециевидными вырезами, с датчиками положения первого и второго стопоров с конусообразными концами диска относительно трапециевидных вырезов, с датчиком давления воздуха, установленным в пневмомагистрали.
Решение технической задачи достигается также посредством отличительных признаков способа управления ПП посредством системы управления, при котором: определяют текущее угловое положение диска с трапециевидными вырезами, и стопоров с конусообразными концами диска относительно трапециевидных вырезов, вводят первый и второй стопоры с конусообразными концами в вырезы диска и обезвоздушивают левую и правую полости ГПЦ, задают направление и величину целевого углового положения трапециевидных вырезов диска относительно первого и второго стопоров с конусообразными концами, задают величину текущего угла поворота диска с трапециевидными вырезами, составляющего 0,5…0,8 от целевого угла поворота, подают сигналы управления в электромагниты четвертого и третьего пневмоклапанов для вывода второго и первого стопоров с конусообразными концами из трапециевидных вырезов диска, затем - в электромагниты первого или второго пневмоклапанов для поворота диска на величину заданного текущего угла путем подачи воздуха в правую или левую полости ГПЦ, переключают ЭБУ на ШИМ-управление электромагнитами первого и второго пневмоклапанов после достижения заданного текущего угла поворота диска с трапециевидными вырезами, осуществляют поворот диска до заданного целевого угла, определяя с помощью датчика углового положения диска его позицию в процессе поворота подачей воздуха в одну из полостей ГПЦ в виде одного или более импульсов, служащих для перемещения поршня в заданном направлении. После достижения заданного целевого углового положения диска выполняют обезвоздушивание левой и правой полостей ГПЦ путем подачи сигналов управления от ЭБУ на выключение электромагнитов первого и второго пневмоклапанов. Подают сигналы от ЭБУ на электромагниты третьего и четвертого пневмоклапанов управления положением поршней ПЦ для ввода первого и второго стопоров с конусообразными концами в противолежащие трапециевидные вырезы диска.
Сочетание отличительных признаков ПП, системы управления ПП и способа управления ПП не обнаружено в ходе патентно-информационного поиска, следовательно, техническое решение соответствует критерию «новизна». Это сочетание отличительных признаков также не следует явно из уровня техники, следовательно, техническое решение соответствует критерию «изобретательский уровень».
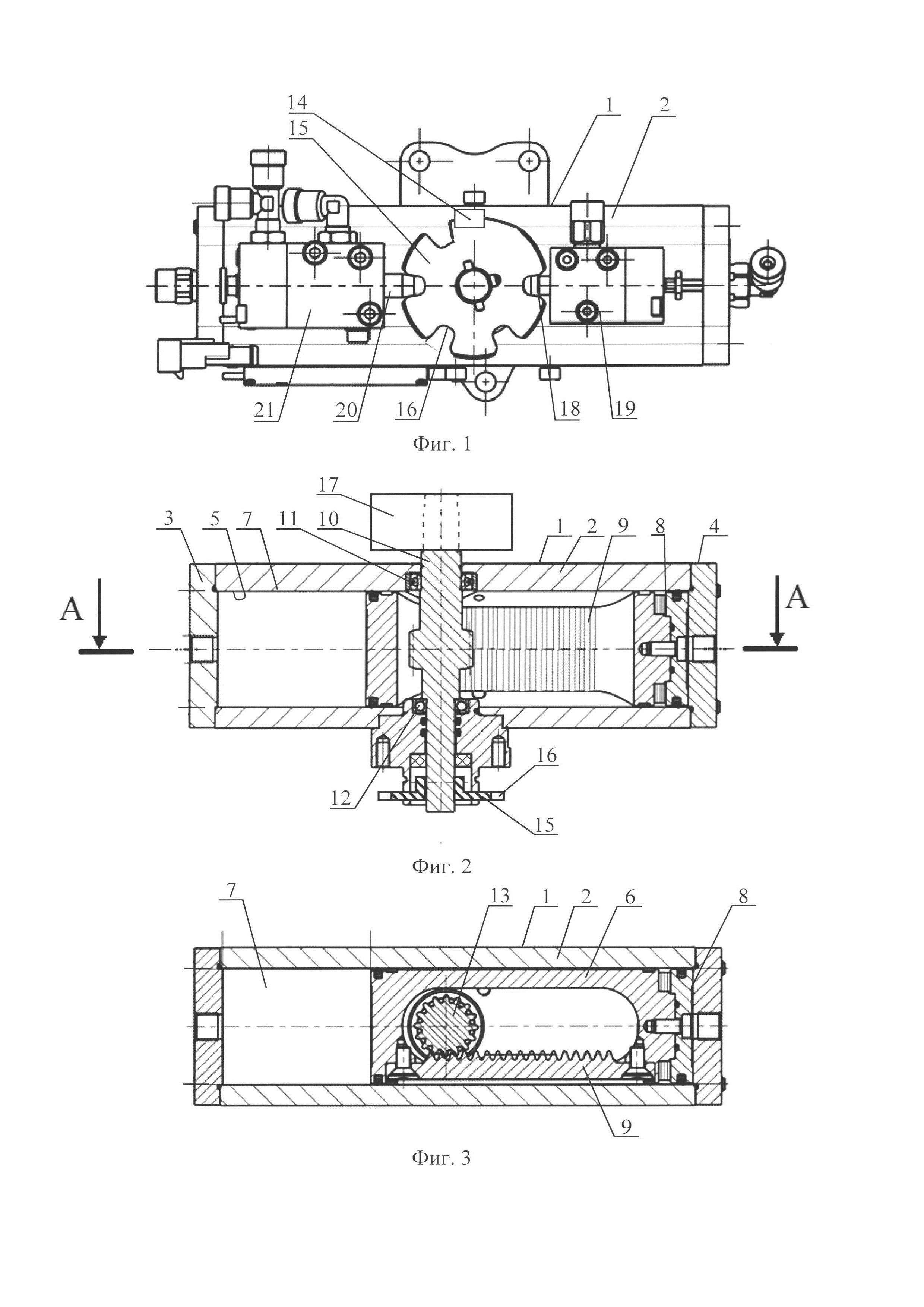
На фиг. 1 показан пневматический привод.
На фиг. 2 показано осевое сечение пневматического цилиндра.
На фиг. 3 показано сечение А-А на фиг. 2.
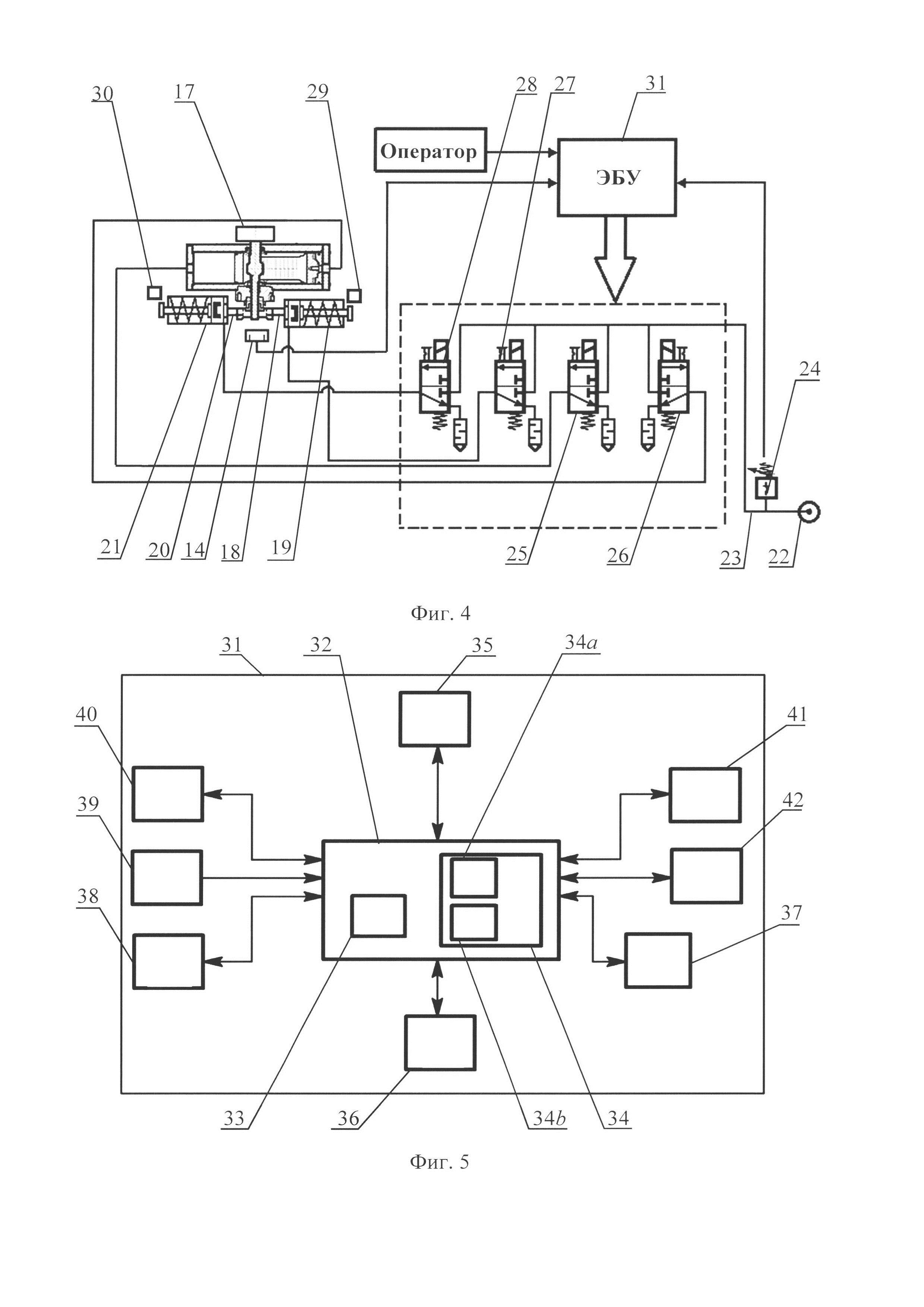
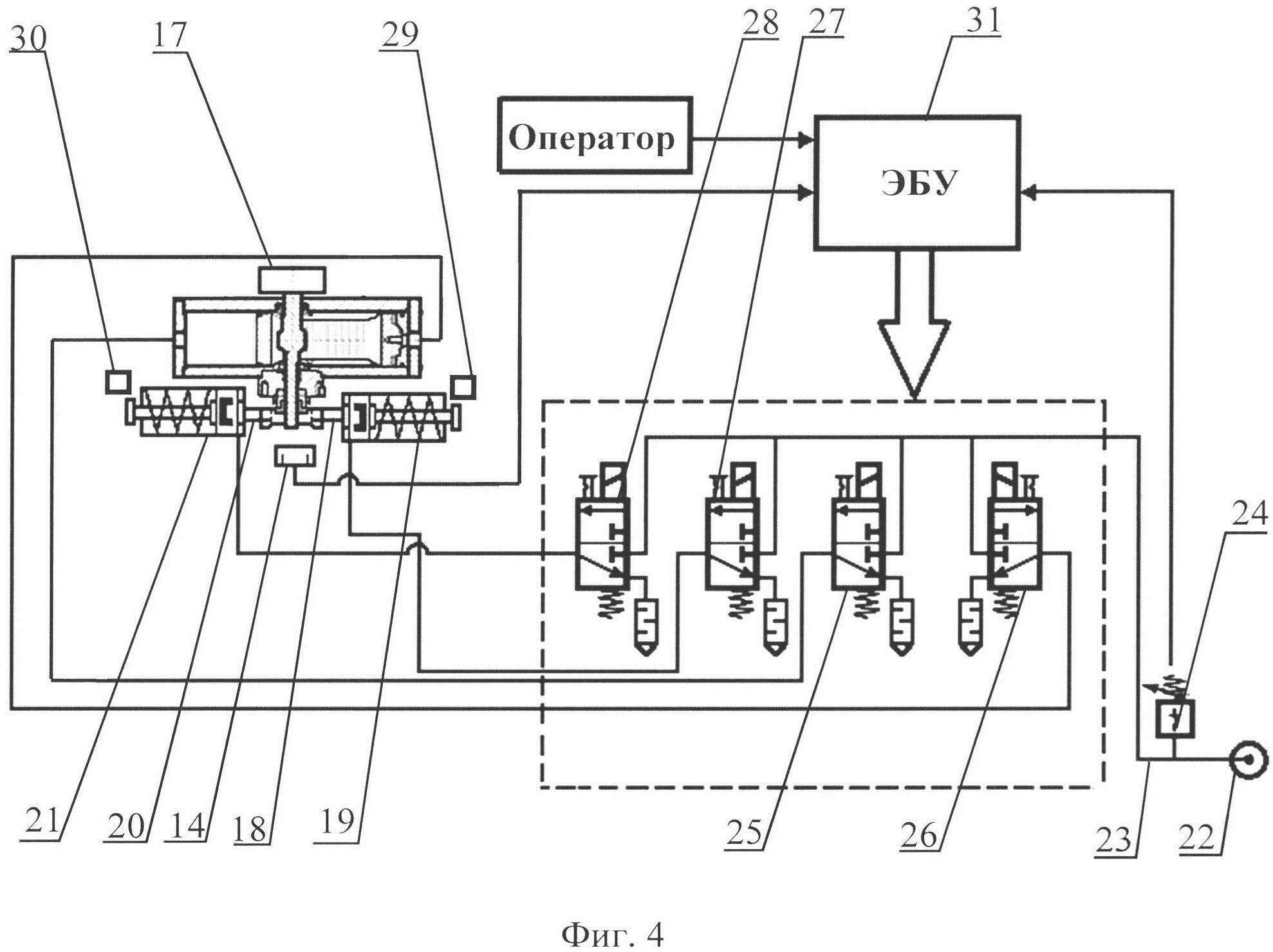
На фиг. 4 показана схема системы управления пневматическим приводом.
На фиг. 5 показан блок управления пневматическим приводом.
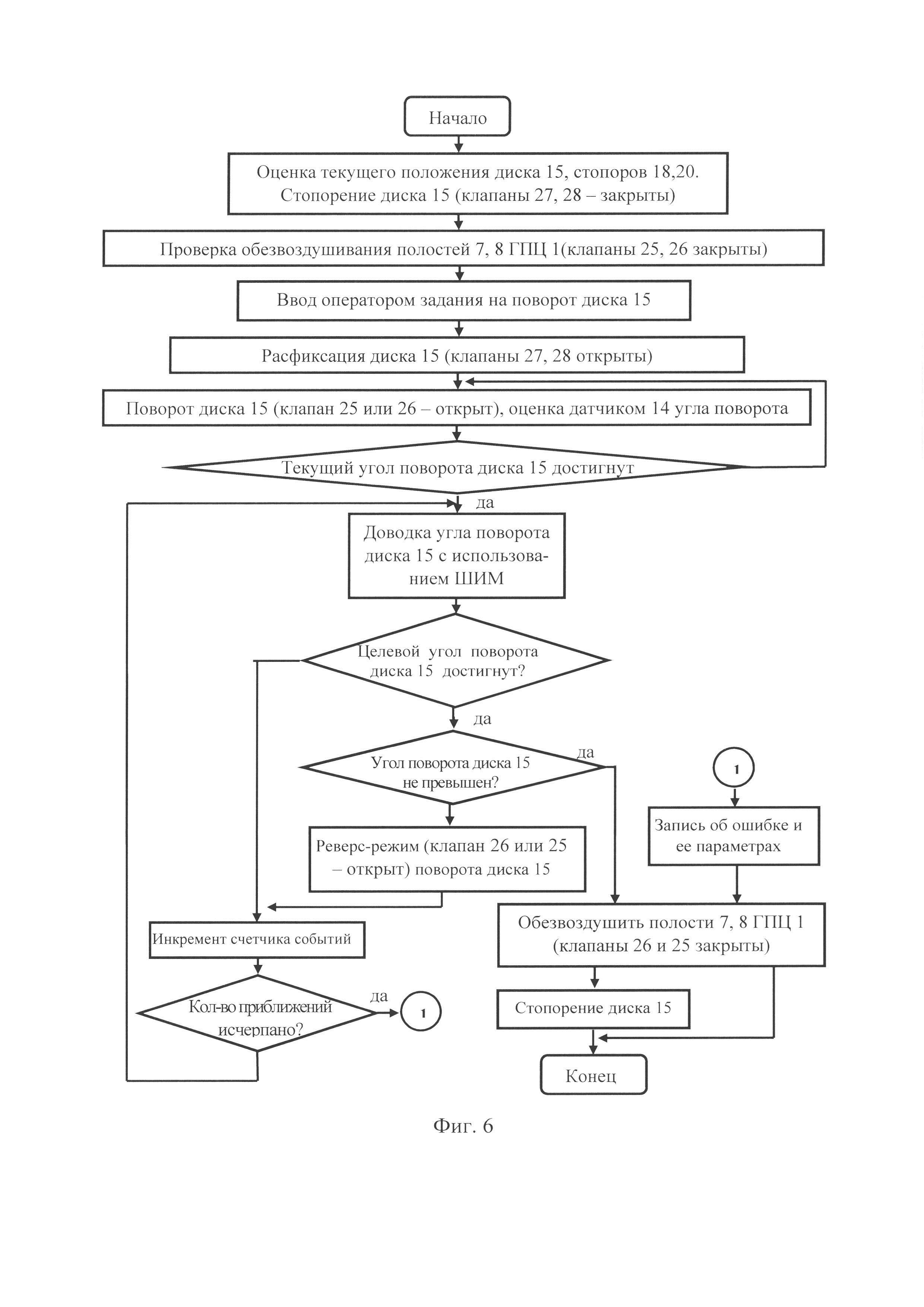
На фиг. 6 показан алгоритм управления пневматическим приводом.
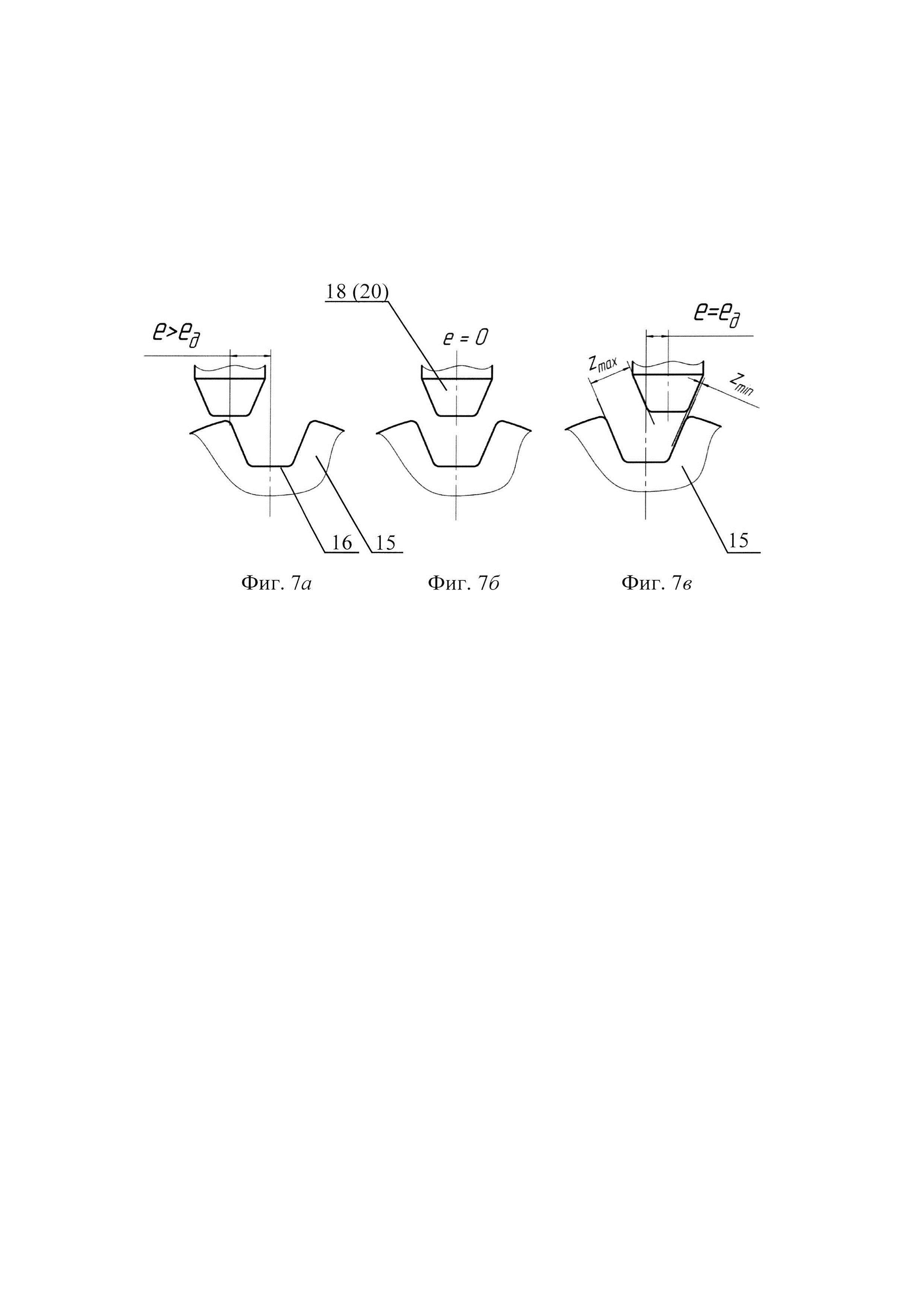
На фиг. 7 показано позиционирование трапециевидных вырезов диска относительно конусообразных концов стопоров.
Пневматический привод (ПП) (фиг. 1-4) имеет: главный пневмоцилиндр (ГПЦ) 1 с корпусом 2, закрытым крышками 3 и 4, с полостью 5 внутри корпуса 2, с установленными в корпусе подвижными частями: с поршнем 6, делящим полость 5 ГПЦ 1 на левую полость 7 и правую полость 8, с зубчатой рейкой 9, закрепленной на поршне 6 (фиг. 3), с выходным валом 10, ось которого перпендикулярна оси ГПЦ 1, опирающимся на подшипники 11 и 12, концы которого расположены вне корпуса 2, и с зубчатой шестерней 13 на выходном валу 10, зубья которой взаимодействуют с зубьями рейки 9; расположенный на корпусе 2 ГПЦ 1 датчик 14 углового положения выходного вала 10 и установленного на нем диска 15 с трапециевидными вырезами 16 (фиг. 1), количество которых равно заданному числу фиксируемых угловых положений выходного вала 10 и диска 15; многопозиционный командоаппарат 17 (пневматический, гидравлический или электрический), соединенный с выходным валом 10; расположенные на корпусе 2 ГПЦ 1 первый стопор 18 с конусообразным концом с пневматическим приводом 19 (фиг. 1, 4), взаимодействующий с трапециевидными вырезами 16 на диске 15, служащий для фиксирования углового положения диска 15 и выходящий из взаимодействия при подаче команды на изменение углового положения диска 15; второй стопор 20 с конусообразным концом с пневмоприводом 21, установленный на корпусе 2, служащий для контроля фиксирования диска 15 и командоаппарата 17 и взаимодействующий с трапециевидными вырезами 16 диска 15.
Система управления (фиг. 4) для управления работой ПП содержит: источник 22 давления рабочей среды, пневмомагистраль 23 с установленным в ней датчиком 24 давления, первый двухпозиционный нормально закрытый управляемый электромагнитом пневмоклапан 25, управляющий положением поршня 6 ГПЦ 1, вход которого присоединен к пневмомагистрали 23, а выход соединен с правой полостью 8 ГПЦ 1, соединяемой с атмосферой при выключенном электромагните, второй двухпозиционный нормально закрытый управляемый электромагнитом пневмоклапан 26, управляющий положением поршня 6 ГПЦ 1, вход которого подсоединен к пневмомагистрали 23, а выход - к левой полости 7 ГПЦ 1, соединяемой с атмосферой при выключенном электромагните; третий двухпозиционный нормально закрытый управляемый электромагнитом пневмоклапан 27, вход которого присоединен к пневмомагистрали 23, а выход соединен со штоковой полостью ПЦ, служащего для изменения положения первого стопора 18 с конусообразным концом (фиг. 1) относительно трапециевидных вырезов 16 диска 15; четвертый двухпозиционный нормально закрытый управляемый электромагнитом пневмоклапан 28, вход которого присоединен к пневмомагистрали 23, а выход соединен со штоковой полостью ПЦ, служащего для изменения положения второго стопора 18 (фиг. 1) относительно трапециевидных вырезов 16 диска 15; датчики 29 и 30 положения соответственно первого стопора 18 и второго стопора 20 относительно трапециевидных вырезов 16 диска 15; ЭБУ 31 (фиг. 5), электрически соединенный с электромагнитами первого пневмоклапана 25, второго пневмоклапана 26, третьего пневмоклапана 27 и четвертого пневмоклапана 28, с датчиком 14 углового положения диска 15, с датчиком положения 29 первого стопора 18 и датчиком положения 30 второго стопора 20 относительно трапециевидных вырезов 16 диска 15, с датчиком 24 давления рабочей среды, установленным в пневмомагистрали 23.
Электронный блок 31 управления (ЭБУ) (фиг. 4, 5) содержит устройство 32 обработки данных (например, микроконтроллер с архитектурой Advanced RISC Machine (ARM)), включающий в себя оперативное запоминающее устройство 33, энергонезависимое запоминающее устройство 34, имеющее первую часть 34а, где установлена операционная система для управления функциями ПП и сохраняется компьютерная программа исполнения алгоритма управления ПП, и вторую часть 34b запоминающего устройства с компьютерной программой, содержащей процедуры управления ПП и сохраняемую с возможностью выполнения или в сжатом состоянии во внешнем запоминающем устройстве 35 и/или в оперативном запоминающем устройстве 33; интерфейсы 36 (например, RS-485, USB или UART) соединения с шиной; модуль 37 с часами реального времени, перезаряжаемой батареей и контролем питания; аналоговые входы 38, конфигурируемые с возможностью перенастройки измерения величин тока и напряжения с помощью встроенного программного обеспечения или с помощью внешней команды; дискретные входы 39, конфигурируемые с возможностью выбрать структуру входного сигнала (PNP-нагрузка соединяется с плюсом, или NPN-нагрузка соединяется с минусом) микропрограммными обеспечениями или изменить структуру внешней командой; дискретные входы 40; выходы 41 с управлением нагрузки по току; выходы 42 с цифровой диагностикой и ШИМ-модуляцией.
Системой управления (фиг. 5) осуществляется способ управления ПП в соответствии с алгоритмом (фиг. 6), при котором воздух подают в одну из полостей 7 или 8 ГПЦ 1 (фиг. 2, 3, 4) в виде одного импульса заданной длительности и набора импульсов заданной скважности, в зависимости от положения поршня 6 ГПЦ 1 после определения углового положения диска 15 с помощью датчика 14, при этом определяют текущее угловое положение диска 15 с трапециевидными вырезами 16 и стопоров 18 и 20 с конусообразными концами относительно трапециевидных вырезов 16, осуществляют стопорение диска 15 путем ввода стопоров 18, 20 с конусообразными концами в трапециевидные вырезы 16 подачей от ЭБУ 31 на электромагниты пневмоклапанов 27, 28 сигнала закрытия; проверяют подачу воздуха в полости 7, 8 ГПЦ (путем открытия пневмоклапанов 25, 26), после чего обезвоздушивают их путем закрытия пневмоклапанов 25, 26 при подаче сигналов от ЭБУ 31 на их электромагниты; оператором вводится в ЭБУ 31 целевой угол поворота диска 15 с трапециевидными вырезами 16, и задается текущий угол поворота диска 15, составляющий 0,5…0,8 от целевого угла поворота, подается сигнал управления с ЭБУ 31 на электромагниты пневмоклапанов 27, 28 для их открытия и выведения конусообразных концов стопоров 18, 20 из трапециевидных вырезов 16 диска 15, то есть выполняется расфиксация диска 15, подается сигнал управления от ЭБУ 31 на электромагниты пневмоклапанов 25 или 26, открывается один из пневмоклапанов, подается воздух из пневмомагистрали в полость 7 или 8 ГПЦ 1 соответственно, выполняется поворот диска 15 с трапециевидными вырезами 16 на текущий угол против или по часовой стрелке соответственно, после достижения текущего угла поворота диска 15, регистрируемого датчиком 14, ЭБУ 31 переключается на ШИМ-управление с подачей импульсов заданной скважности на электромагниты пневмоклапанов 25 или 26, в зависимости от выбранного направления вращения диска 15, осуществляя поворот диска 15 до заданного целевого угла поворота подачей воздуха в виде набора импульсов в полости 7 или 8 ГПЦ 1, определяя с помощью датчика 14 положение диска 15 в процессе его поворота; если достижение заданного целевого угла поворота диска 15 не осуществляется за заданное число итераций, фиксируемых счетчиком событий в программе управления, то выдается сообщение об ошибке и ее параметрах, а полости 7, 8 ГПЦ 1 обезвоздушиваются путем закрытия пневмоклапанов 25, 26 подачей сигналов управления от ЭБУ 31 на их электромагниты; после поступления от датчика 14 в ЭБУ 31 сигнала о достижении заданного целевого угла поворота диска 15 оценивается точность позиционирования трапециевидных вырезов 16 относительно стопоров 18 и 20 посредством сравнения величин достигнутого угла поворота диска 15 и целевого угла поворота. Если отклонение е трапециевидных вырезов 16 (фиг. 7а) относительно конусообразных концов стопоров 18 и 20 находится за пределами допустимого угла ед (е>ед) отклонения, то при положительной разности величин достигнутого угла поворота трапециевидного выреза 16 диска 15 и целевого угла поворота диска 15, то импульсы давления подаются в полость 8, а если разность отрицательная, то импульсы давления подаются в полость 7. Если число итераций включения-выключения электромагнитов пневмоклапанов 25, 26 счетчиком событий в программе управления превышает допустимое заданное значение, то выдается сообщение об ошибке и ее параметрах, а полости 7 и 8 ГПЦ 1 обезвоздушиваются путем закрытия пневмоклапанов 25, 26 подачей сигналов от ЭБУ 31 на электромагниты пневмоклапанов 25 и 26.
Если отклонение е трапециевидных вырезов 16 диска 15 (фиг. 7а, 7б) относительно конусообразных концов стопоров 18 и 20 находится в пределах допустимого углового размера ед отклонения, равного угловому размеру зазора z (zmax>z≥zmin) (фиг. 7в) между смежными краями конусообразного трапециевидного выреза 16 и конусообразного конца стопора, то выполняется обезвоздушивание полостей 7, 8 ГПЦ 1 (путем закрытия пневмоклапанов 25, 26 подачей сигналов от ЭБУ 31 на их электромагниты) и стопорение диска 15 (подачей от ЭБУ 31 на электромагниты пневмоклапанов 27, 28 сигнала закрытия), сопровождаемое его поворотом до заданного положения за счет клинового эффекта, возникающего при взаимодействии конусообразных концов стопоров 18, 20 с трапециевидными вырезами 16.
Пневмопривод рабочего органа устройства для пробивки корки электролита в алюминиевом электролизере
Устройство уплотнения верхней части дверного проема кузова транспортного средства
Система управления пневматическим приводом прислонно-сдвижной двери пассажирского вагона
Устройство пневматического привода прислонно-сдвижной двери пассажирского вагона
Устройство управления пневматическим приводом вагонного замедлителя
Пневматический привод с цилиндром одностороннего действия
Устройство для розлива газированных напитков
Блок пневматической схемы шунтирования вентиля тормоза безопасности
Блок пневматической схемы шунтирования вентиля тормоза безопасности
Система управления дверями транспортного средства
Пневмопривод рабочего органа устройства для пробивки корки электролита в алюминиевом электролизере
Пневматический привод с цилиндром одностороннего действия
Устройство для розлива газированных напитков

