Результат интеллектуальной деятельности: ДВУХЧАСТОТНЫЙ ФАЗОВЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ЗАДЕРЖКИ СИГНАЛОВ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ В ИОНОСФЕРЕ
Вид РИД
Изобретение
Предлагаемое изобретение относится к области спутниковой навигации и предназначено для определения задержки сигналов глобальных навигационных спутниковых систем (ГНСС) в ионосфере с помощью двухчастотной навигационной аппаратуры потребителя (НАЛ).
Широкое использование современных глобальных навигационных спутниковых систем ГЛОНАСС и GPS приводит к необходимости повышения точности навигационных измерений. Большое влияние на погрешность навигационных измерений по сигналам глобальных навигационных спутниковых систем ГЛОНАСС и GPS оказывают условия прохождения сигналов навигационных космических аппаратов (НКА) в атмосфере.
Как показывают исследования, наибольшее влияние на сигналы НКА ГЛОНАСС и GPS оказывает ионосфера. Величина задержки сигнала в ионосфере зависит от солнечной активности, сезонных и ежедневных вариаций электронной концентрации, угла места и азимута НКА и от широты и долготы точки приема сигнала.
Существует способ, в котором для нахождения ионосферной задержки сигнала используется разность кодовых псевдодальностей, измеренная по сигналам в различных частотных диапазонах [1], в данном способе требуется проводить калибровку разности задержек при прохождении сигналов по трактам НАП для L1 и L2. Для калибровки НАП необходимо определять значения разности задержек сигналов L1 и L2 в спутнике, антенне и тракте приемника. Определение указанных значений длительный и трудоемкий процесс, который требует использования дополнительной аппаратуры.
Использование в способе разности кодовых псевдодальностей, которые имеют случайную погрешность на уровне 1-2 метра, приводит к увеличению погрешности определения ионосферной задержки сигнала.
Кроме двухчастотного кодового способа, известен одночастотный способ определения ионосферной задержки сигнала, описанный в патенте РФ №2208809 [2] где для определения ионосферной задержки сигнала используется разность приращений кодовой и фазовой псевдодальностей. Алгоритм нахождения ионосферной задержки сигнала разбивается на два этапа. На первом этапе оценивается вертикальная (зенитная) задержка сигнала в ионосфере, а на втором вертикальная (зенитная) задержка пересчитывается в наклонную с помощью отображающей функции, описывающей зависимость задержки сигнала в ионосфере от угла места НКА. Как и в предыдущем способе, недостатком является использование в расчетах кодовых псевдодальностей имеющих повышенную случайную погрешность. Дополнительным фактором, определяющим погрешность данного метода, является использование в качестве отображающей функции математической модели ионосферы с недостающей точностью аппроксимирующей зависимость задержки сигнала в ионосфере от угла места НКА.
Наиболее близким к заявляемому изобретению является способ определения задержки сигналов навигационной спутниковой системы в ионосфере [3], в котором в качестве исходных данных используются не кодовые псевдодальности, а псевдодальности, измеренные по фазе несущей частоты сигнала в диапазонах L1 и L2. Определение ионосферной задержки по данному способу также разбивается на два этапа. На первом этапе оценивают приращения фазовых псевдодальностей за время между текущими и предыдущими измерениями, затем вычисляется разница между полученными приращениями и определяется вертикальная (зенитная) задержка навигационного сигнала спутниковой системы в ионосфере по формуле:
где  - накопленное значение
- накопленное значение
наклонного фактора для j-го НКА;
i - текущий момент времени, с;
j - номер навигационного космического аппарата, j=1,2,…,n - коэффициент фильтрации, 0<k<1;
N{i) - количество навигационных космических аппаратов, видимых в текущий момент времени i;
 - приращение наклонного фактора;
- приращение наклонного фактора;
 - наклонный фактор;
- наклонный фактор;
Re - радиус Земли, м;
h - средняя высота ионосферного слоя, м;
yj (i) - угол места j-го НКА, град;
 - накопленное значение наклонной задержки навигационного спутникового сигнала в ионосфере, м;
- накопленное значение наклонной задержки навигационного спутникового сигнала в ионосфере, м;
 - приращение наклонной задержки навигационного спутникового сигнала в ионосфере, м;
- приращение наклонной задержки навигационного спутникового сигнала в ионосфере, м;
f1, f2 - несущая частота для частотного диапазона L1 и L2 соответственно, Гц;
 - приращение фазовой псевдодальности, измеренной на несущей частоте f1, м;
- приращение фазовой псевдодальности, измеренной на несущей частоте f1, м;
 - приращение фазовой псевдодальности,
- приращение фазовой псевдодальности,
измеренной на несущей частоте f2, м.
На втором этапе вертикальная (зенитная) задержка сигнала в ионосфере пересчитывается в наклонную задержку навигационного сигнала спутниковой системы в ионосфере для каждого видимого НКА, с использованием математической модели ионосферы по формуле:
Используемое в прототипе понятие наклонного фактора соответствует понятию отображающей функции, используемой в одночастотном методе [2] (выражения для их определения совпадают).
Найденная наклонная задержка сигнала имеет погрешность, обусловленную погрешностью определения вертикальной задержки навигационного сигнала спутниковой системы в ионосфере и погрешностью математической модели ионосферы, аппроксимирующей зависимость задержки сигнала в ионосфере от угла места НКА.
В основу изобретения положена задача повышения точности навигационных измерений, за счет уменьшения погрешности определения задержки сигналов навигационной спутниковой системы в ионосфере.
Поставленная задача решается тем, что в способе определения задержки сигналов навигационной спутниковой системы в ионосфере, по которому измеряют фазовые псевдодальности и вычисляют их приращения на двух несущих частотах, вычисляют разность между полученными приращениями, а наклонную задержку сигналов навигационной спутниковой системы в ионосфере для каждого видимого НКА определяют по формуле, включающей вычисление вертикальной (зенитной) задержки сигналов навигационной спутниковой системы в ионосфере и наклонного фактора, учитывающего математическую модель ионосферы, согласно изобретению, сначала при вычислении вертикальной (зенитной) задержки сигналов навигационной спутниковой системы и наклонных задержек сигнала в ионосфере каждого видимого НКА используют приращения наклонного фактора и фазовых псевдодальностей, измеренных в диапазонах L1 и L2, на интервале времени М, ограниченном допустимым значением погрешности аппроксимации измеряемых приращений линейной зависимостью (например, 30 секунд):
 - приращение наклонного фактора;
- приращение наклонного фактора;
 - приращение фазовой псевдодальности, измеренной на несущей частоте f1, м;
- приращение фазовой псевдодальности, измеренной на несущей частоте f1, м;
 - приращение фазовой псевдодальности, измеренной на несущей частоте f2, м;
- приращение фазовой псевдодальности, измеренной на несущей частоте f2, м;
затем рассчитывают наклонную задержку сигнала в ионосфере для каждого у-го НКА по формуле:
 где i>М;
где i>М;
i - текущий момент времени, с;
j - номер видимого в текущий момент навигационного космического аппарата, j=1, 2,…,n;
iн - начальный момент времени слежения за сигналом j-го НКА;
 - приращение наклонной задержки навигационного спутникового сигнала j-го НКА в ионосфере, м;
- приращение наклонной задержки навигационного спутникового сигнала j-го НКА в ионосфере, м;
 - оценка значения ионосферной задержки сигнала, сформированная на начальном этапе слежения за сигналом j-го НКА с учетом значения угла места спутника и оценки вертикальной задержки сигналов навигационной спутниковой системы в ионосфере, сформированной к моменту начала слежения за сигналом j-го НКА;
- оценка значения ионосферной задержки сигнала, сформированная на начальном этапе слежения за сигналом j-го НКА с учетом значения угла места спутника и оценки вертикальной задержки сигналов навигационной спутниковой системы в ионосфере, сформированной к моменту начала слежения за сигналом j-го НКА;
OFj (γj (iн)) - наклонный фактор j-ого НКА в начальный момент времени;
γj (iн) - угол места НКА в начальный момент времени, град.
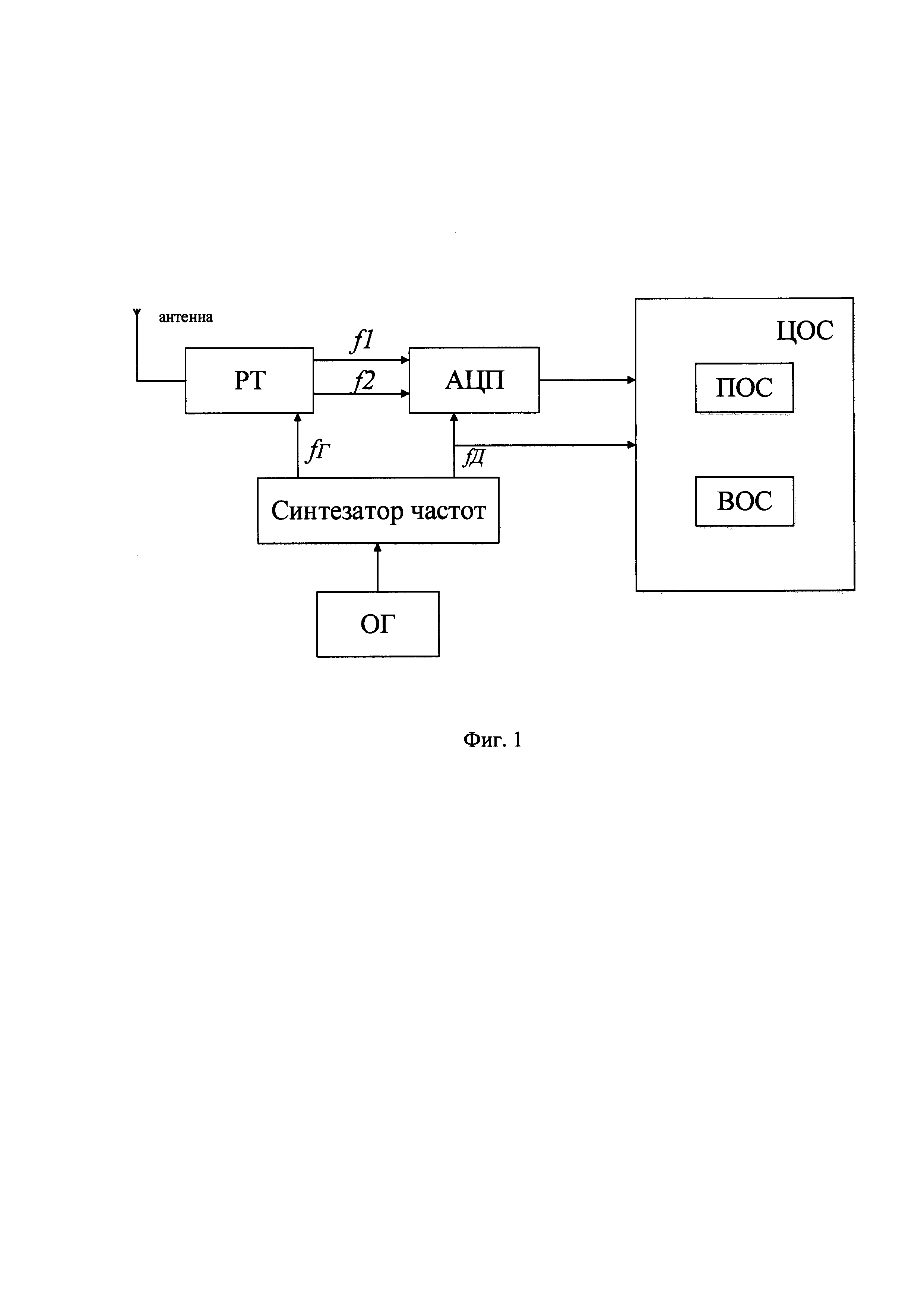
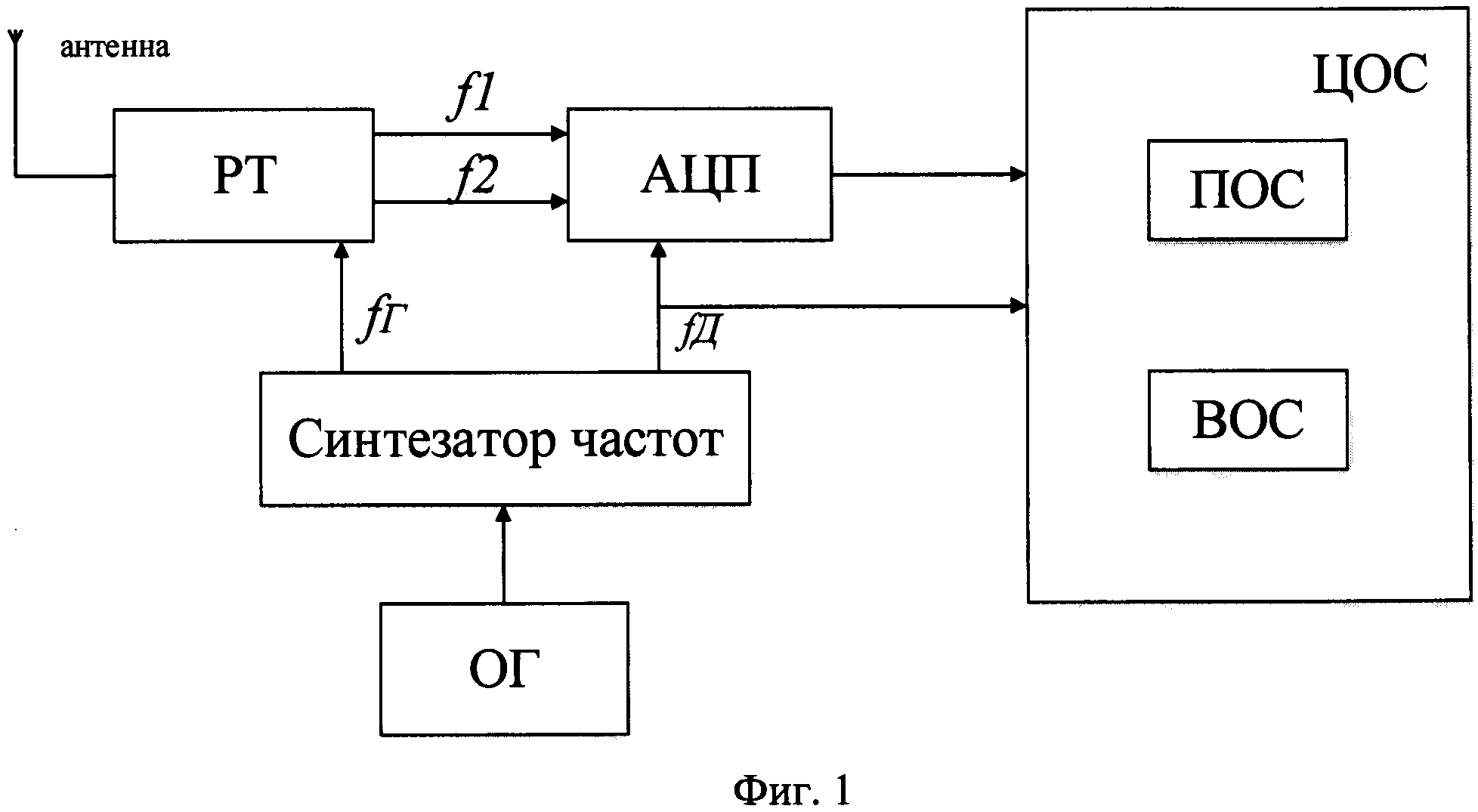
На фиг. 1 представлена структурная схема навигационной аппаратуры потребителя, а на фиг. 2 приведена блок-схема алгоритма, реализующего предлагаемый способ фазового двухчастотного определения задержки сигналов навигационной спутниковой системы в ионосфере.
Навигационная аппаратура потребителя включает следующие блоки: антенну, радиотракт (РТ), синтезатор частот, блок аналого-цифрового преобразователя (АЦП), опорный генератор (ОГ) и блок цифровой обработки сигналов (ЦОС). При этом блок цифровой обработки сигналов содержит блок первичной обработки сигналов (ПОС) и блок вторичной обработки сигналов (ВОС).
На блок РТ от антенны поступает навигационный сигнал от НКА, где он суммируется с частотой гетеродина и разделяется на 2 канала. Отфильтрованный и усиленный сигнал поступает на двухканальный АЦП, тактируемый тактовой частотой синтезатора частот, где происходит оцифровка принятого сигнала. Полученные цифровые выборки поступают на вход блока ПОС, для определения основных навигационных параметров - кодовой и фазовой псевдодальностей, угла места НКА, амплитуды и др. Блок ВОС принимает навигационные параметры, где на программном уровне может быть реализован алгоритм расчета ионосферной задержки сигнала каждого видимого в текущий момент времени НКА согласно блок-схеме, представленной на фиг. 2.
Исходными данными для расчета наклонной задержки сигнала в ионосфере являются, угол места спутника, псевдодальность, измеренная по фазе несущей сигнала, и наклонный фактор (операнд 1). Фазовая псевдодальность на частотах L1 L2 и наклонный фактор каждого j-ого НКА описываются следующими выражениями:
где  - дальность до j-ого НКА;
- дальность до j-ого НКА;  - фазовая неоднозначность;
- фазовая неоднозначность; 
 - длина волны;
- длина волны;  - задержка сигнала j-го НКА в ионосфере;
- задержка сигнала j-го НКА в ионосфере;
 - задержка сигнала j-ого НКА в тропосфере; τ - расхождение шкалы времени НАЛ относительно шкалы времени систем ГЛОНАСС или GPS;
- задержка сигнала j-ого НКА в тропосфере; τ - расхождение шкалы времени НАЛ относительно шкалы времени систем ГЛОНАСС или GPS;  - случайная погрешность; с - скорость распространения радиоволн в вакууме;
- случайная погрешность; с - скорость распространения радиоволн в вакууме;  - угол места j-го НКА; Re - радиус Земли; h - средняя высота ионосферного слоя; i - текущий момент времени.
- угол места j-го НКА; Re - радиус Земли; h - средняя высота ионосферного слоя; i - текущий момент времени.
На следующем шаге инициализируют переменную k (операнд 2) и проверяют условие окончания цикла, где N(i) - количество навигационных космических аппаратов, видимых в текущий момент времени i (операнд 3).
Для расчета приращений фазовых псевдодальностей и приращения наклонного фактора, на интервале времени М, необходимо записать в буфер исходные данные, где j - номер видимого в текущий момент навигационного космического аппарата (операнд 4). После записи происходить увеличение размера буфера (операнд 5) и необходимо проверить условие равности размера буфера значению М (операнд 6). При невыполнении условия инкрементируют к (операнд 7) и считывают следующее значение у (операнд 8), в обратном случае вычисляют приращения фазовых псевдодальностей и приращение наклонного фактора (операнд 9). Приращения фазовых псевдодальностей и приращение наклонного фактора рассчитывают следующими выражениями:
Далее вычисляют приращение наклонной задержки (7) (операнд 10) и повторяют алгоритм до того, пока условие цикла (операнд 3) не станет ложным.

Как только условие цикла станет ложным, переходят на выполнение следующего цикла, где переменная k обнуляется (операнд 11) и приступают к проверке условия окончания цикла (операнд 12). Данный цикл отвечает за отбраковку спутников, по которым не было посчитано приращение наклонной задержки. За отбраковку отвечает условие равности размера буфера и значения М (операнд 13). Если условие ложное, то инкрементируют k (операнд 14) и считывают следующее значение j (операнд 15), в обратном случае полученные данные подставляют в функцию расчета вертикальной задержки (операнд 16) и повторяют алгоритм до того, пока условие цикла (операнд 12) не станет ложным.
На следующем шаге переменная k обнуляется (операнд 17) и проверяют условие окончания цикла (операнд 18). Если условие ложное, то проверяется условие равности размера буфера и значения М (операнд 19). При ложном результате инкрементируют к (операнд 20) и считывают следующее значение j (операнд 21), а при правдивом результате проверяют начальный момент времени слежения за сигналом (операнд 22). Если текущий момент времени является начальным моментов времени слежения за сигналом, то рассчитывается оценка начального значения ионосферной задержки сигнала (операнд 24) (формула 8), в обратном случае рассчитывается наклонная задержка сигнала в ионосфере (операнд 23) (формула 9). После расчета алгоритм повторяют до того, пока условие цикла (операнд 18) не станет ложным.

Таким образом, предлагаемый способ позволяет определить наклонную задержку сигнала в ионосфере для каждого НКА без погрешности математической модели ионосферы, аппроксимирующей зависимость задержки сигнала в ионосфере от угла места НКА.
Применение приращений фазовых псевдодальностей на некотором интервале времени, ограниченном допустимым значением погрешности аппроксимации измеряемых приращений линейной зависимостью, позволяет обнаружить нарушения непрерывности слежения за фазой несущей частоты НКА и исключить вызванные этим «скачки» фазовых циклов, тем самым уменьшить случайную погрешность измерения приращений фазовых псевдодальностей, что соответственно уменьшает погрешность определения вертикальной (зенитной) задержи сигнала в ионосфере.
Помимо этого, формирование текущих оценок наклонной ионосферной задержки для каждого НКА как суммы начального значения и интеграла изменений ионосферной задержки сигнала, рассчитанного по разности приращений фазовых псевдодальностей в диапазонах L1 и L2, дает возможность с наименьшей погрешностью определить изменение ионосферной задержки сигнала для каждого спутника, что и исключает из погрешности определения текущего значения наклонной задержки сигнала в ионосфере составляющую погрешности, обусловленную погрешностью модели ионосферы, аппроксимирующей зависимость задержки сигнала в ионосфере от угла места НКА.
В заявляемом способе, так же как и в прототипе, исключена систематическая погрешность, обусловленная задержкой сигнала в трактах НАП, за счет применения фазовых приращений соответствующих измерений.
ЛИТЕРАТУРА
1. Глобальная спутниковая навигационная система ГЛОНАСС / Под ред. Харисова В.Н., Перова А.И., Болдина В.А. - М.: ИПРЖР, 1999. - 560 с.
2. Пат. RU 2208809, МПК7 G01S 5/02, G01S 1/32, Н04В 7/185. Способ одночастотного определения задержки сигналов навигационной спутниковой системы в ионосфере / Казанцев М.Ю., Кокорин В.И., Фатеев Ю.Л.; заявитель ГОУ ВПО «Красноярский государственный технический университет». - №2002104727/09; заявл. 21.02.2002. опубл. 20.07.2003.
3. Пат. RU 2584243 С1, МКП G01S 19/04. Способ определения задержки сигналов навигационной спутниковой системы в ионосфере / Курносов А.С., Фатеев Ю.Л.; заявитель Федеральное государственное автономное образовательное учреждение высшего профессионального образования «Сибирский федеральный университет». - №2015110269/07; заявл. 23.03.2015. опубл. 25.05.2016, Бюл. №14 (прототип).




Шпиндельный узел (варианты)
Система синхронизации частоты и шкалы времени удаленных пунктов
Шпиндельный узел
Гидростатический подшипник
Червячная передача
Прибор для контроля измерительного усилия и погрешности измерительных головок
Устройство для определения пространственной ориентации объекта
Система синхронизации частоты и шкалы времени удаленных пунктов
Имитатор навигационных радиосигналов
Способ контроля геометрии крупногабаритных объектов

