Результат интеллектуальной деятельности: СИСТЕМА СИНХРОНИЗАЦИИ ЧАСТОТЫ И ШКАЛЫ ВРЕМЕНИ УДАЛЕННЫХ ПУНКТОВ
Вид РИД
Изобретение
Изобретение относится к радиотехнике и может быть использовано в системах единого времени, радионавигационных системах наземного базирования, в пространственно распределенных системах контроля и управления при решении задач, связанных с синхронизацией частот и шкал времени удаленных пунктов, например пунктов системы контроля за ГЛОНАСС.
В настоящее время для синхронизации частоты и шкалы времени (ШВ) пространственно разнесенных пунктов используют сигналы навигационных космических аппаратов (НКА) глобальных спутниковых радионавигационных систем (СРНС).
Известна, например, система синхронизации часов по радиоканалу [1] по патенту РФ №2037172, которая содержит группу ведущих часов, группу удаленных часов, центральные часы, синхронизатор СРНС, НКА СРНС, линии связи от удаленных часов к центральным часам, линии связи от центральных часов к ведущим часам и к синхронизатору СРНС, радиоканал меток времени ведущих часов, навигационный радиоканал НКА СРНС, радиоканал связи синхронизатора и НКА СРНС.
На ведущих часах с использованием опорного генератора (ОГ) и формирователя шкалы времени (ФШВ) формируется ШВ, из сигналов которой формируется маркерный сигнал, который через радиопередатчик передается в радиоканал меток времени ведущих часов. Эти метки времени принимаются радиоприемниками на удаленных и центральных часах.
Как следует из приведенного описания, система [1] содержит большое число разнородных блоков и линий связи и требует последовательного проведения большого числа операций по предварительной синхронизации ШВ, что снижает надежность и точность данной системы.
Кроме того, не оговаривается, какие именно НКА используются при синхронизации удаленных часов в данной системе. При этом анализ качества синхронизации и формирование признаков достоверности в системе [1] обеспечивается только на центральных часах, что не обеспечивает оперативный контроль достоверности синхронизации ШВ на ведущих и удаленных часах.
Известна система формирования временных поправок по сигналам спутниковой радионавигационной системы к шкалам времени пространственно разнесенных пунктов по патенту РФ №2133489 [2], которая содержит НКА СРНС и N пространственно разнесенных пунктов, каждый из которых содержит опорный генератор, формирователь шкалы времени и связанное с ними устройство синхронизации (УС). Каждое из УС связано навигационным радиоканалом с НКА СРНС и содержит блок связи с УС синхронизации других пунктов. В каждое из УС введен приемоизмеритель СРНС, блоки управления, памяти, экстраполяции поправок, сравнения поправок, контроля качества синхронизации, осреднения координат, усреднения ансамбля поправок, сглаживания временных поправок и блок сравнения с опорными значениями. Каждое УС принимает сигналы навигационного радиоканала и канала связи с другими УС и формирует на своих выходах системные поправки, относительные поправки и признак качества временных поправок. Система обеспечивает повышение точности определения и оперативный контроль качества системной и относительной поправок к местной шкале времени каждого из N пунктов при отсутствии точного знания координат этих пунктов.
Как следует из описания, в данной системе перед вычислением поправок к ШВ используется длительный процесс (до нескольких суток) вычисления собственных координат удаленного пункта с присущими такому процессу ошибками, что нецелесообразно для неподвижного пункта с точно известными координатами и существенно снижает точность синхронизации частоты и ШВ. Отсутствие совместной обработки сигналов нескольких НКА, радиовидимых одновременно с нескольких удаленных пунктов, одним из которых может быть эталонный пункт, приводит также к существенному снижению точности синхронизации и существенному увеличению времени формирования поправок к ШВ удаленных пунктов.
В качестве прототипа заявляемой системе предлагается система формирования временных поправок по сигналам спутниковой радионавигационной системы к шкалам времени пространственно разнесенных пунктов, описанная в [3, с. 255…257, рис. 17.1, рис. 17.2].
Система-прототип содержит N НКА СРНС и М пространственно разнесенных пунктов. Каждый из пунктов, в том числе i-й и j-й пункты, содержит последовательно соединенные ОГ и ФШВ, выход которого является выходом ШВ данного пункта, i-го или j-го соответственно, а также устройство синхронизации (УС), которое посредством навигационного радиоканала связано с НКА и содержит блок связи (БС), приемопередающие входы-выходы которого являются входами-выходами канала связи УС данного пункта с аналогичными УС других пунктов. При этом задающий вход УС соединен с выходом ФШВ. УС содержит также аппаратуру приема шкалы времени (АПШВ), радиочастотный вход которой является входом приема сигналов навигационного радиоканала УС, информационный вход АПШВ является входом ввода в УС точных координат данного пункта (например, Xi, Yi, Zi для i-го или Xj, Yj, Zj для j-го пунктов соответственно), а выход АПШВ подключен к первому входу аппаратуры сравнения шкалы времени (АСШВ), выход которой является выходом системных поправок УС для i-го пункта и, кроме того, подключен к информационному входу БС и первому входу сумматора, второй инверсный вход которого соединен с информационным выходом БС, а выход сумматора является выходом относительных поправок для i-го пункта. При этом второй вход АСШВ является задающим входом УС.
Система-прототип работает следующим образом.
В АПШВ каждого пункта вводятся точные координаты этого пункта (например, Xi, Yi, Zi для i-го пункта). На радиочастотный вход АПШВ поступают сигналы от НКА. В сигнале каждого НКА содержится метка времени, момент приема которой (ΔtАП) фиксируется в АПШВ относительно аналогичной метки времени ее внутренней опорной ШВ. Кроме того, в служебной информации сигнала каждого НКА передается информация, определяющая текущее положение НКА на орбите, оцифровка передаваемой метки времени и поправочные коэффициенты, обеспечивающие расчет расхождения передаваемой с НКА метки времени с соответствующей меткой времени системной ШВ СРНС. С использованием принятой информации и введенных точных координат пункта в АПШВ рассчитываются поправки на распространение сигнала на трассе между НКА-АПШВ (τр) и на расхождение переданной метки времени с меткой времени системной ШВ СРНС (τс). Оцифровка внутренней опорной ШВ в АПШВ приводится в соответствие с оцифровкой принятой метки времени и фиксируется величина поправки Δtc к внутренней ШВ tАП АПШВ относительно системной ШВ СРНС Δtc=ΔtАП-τр+τс.
На выходе АПШВ формируется системная ШВ tc=tАП+Δtc.
Одновременно на каждом пункте, например i-м, в ФШВ с использованием сигнала опорной частоты от ОГ формируется местная ШВ ti. Сигналы с выходов ФШВ и АПШВ поступают на соответствующие входы АСШВ, где формируется системная поправка (относительно системной ШВ) для НТВ данного пункта τic=fc-fi.
Поправка τic с выхода АСШВ передается на первый вход сумматора и на информационный вход БС, с приемопередающего входа-выхода которого через канал связи поправка τic поступает на приемопередающие входы-выходы БС других пунктов. Одновременно с этим БС данного пункта принимает значение поправки от других пунктов, например от j-го, которая поступает с информационного выхода БС на второй инверсный вход сумматора, на выходе которого формируется относительная поправка.
Таким образом, в системе-прототипе за счет использования сигналов от НКА в УС обеспечивается на каждом из М пространственно разнесенных пунктов системы формирование поправок к местной ШВ как относительно системной ШВ (системные поправки), так и относительно ШВ любого из М пунктов системы (относительные поправки).
При этом в системе-прототипе, как и в заявляемой системе, указанные задачи решаются только при наличии априорного знания точных координат каждого из М пунктов. Однако в системе-прототипе не используется совместная и высокоточная обработка сигналов (с использованием фазовых измерений) одновременно радиовидимых с двух пунктов К НКА для снижения погрешности синхронизации и исключения влияния нестабильности генераторов на борту НКА, не используется возможность снижения погрешности синхронизации из-за влияния ионосферы, тропосферы и многолучевости.
В основу изобретения положена задача повышения точности синхронизации частоты ОГ и ШВ удаленных пунктов на коротких интервалах времени синхронизации и в автоматическом режиме.
Поставленная цель достигается тем, что в систему синхронизации частоты и шкалы времени удаленных пунктов, содержащую N навигационных космических аппаратов спутниковых радионавигационных систем и М пространственно разнесенных пунктов, каждый из которых содержит последовательно соединенные опорный генератор, первый выход которого является выходом опорной частоты данного пункта, и формирователь шкалы времени, выход которого является выходом шкалы времени данного пункта, первый вход формирователя шкалы времени является входом тактовой частоты со второго выхода опорного генератора, а также устройство синхронизации, которое посредством навигационного радиоканала связано с N навигационными космическими аппаратами спутниковых радионавигационных систем, дополнительно в каждое устройство синхронизации каждого из М пунктов введены блок приема и преобразования навигационного сигнала, блок совместного измерения кодовой и фазовой псевдодальностей, блок коррекции тропосферной и ионосферной погрешностей, блок измерения отклонений частоты и шкалы времени, блок усреднения отклонений и вычисления поправок к частоте и шкале времени, блок приема поправок и блок передачи поправок, причем радиочастотный вход блока приема и преобразования навигационного сигнала является входом приема P-частотного навигационного сигнала радиоканала с N навигационных космических аппаратов спутниковых радионавигационных систем, а управляющий вход является входом опорной частоты с первого выхода опорного генератора данного пункта, выход блока приема и преобразования навигационного сигнала, являющийся выходом преобразованного Р-частотного сигнала с N навигационных космических аппаратов спутниковых радионавигационных систем, соединен с первым входом блока совместного измерения кодовой и фазовой псевдодальностей между данным пунктом и каждым из N навигационных космических аппаратов спутниковых радионавигационных систем на каждой из Р передаваемых ими частот, второй вход блока совместного измерения кодовой и фазовой псевдодальностей является входом опорной частоты с первого выхода опорного генератора данного пункта, а третий вход блока совместного измерения кодовой и фазовой псевдодальностей является входом шкалы времени с выхода формирователя шкалы времени данного пункта, выход блока совместного измерения кодовой и фазовой псевдодальностей соединен с входом блока коррекции тропосферной и ионосферной погрешностей, выходом подключенного к первому входу блока измерения отклонений частоты и шкалы времени, второй вход которого является входом ввода точных координат данного пункта, первый выход блока измерения отклонений частоты и шкалы времени является входом блока передачи поправок к последующему пункту, а второй выход блока измерения отклонений частоты и шкалы времени является первым входом блока усреднения и вычисления поправок по частоте и шкале времени для данного пункта, второй вход блока усреднения и вычисления поправок по частоте и шкале времени подключен к выходу блока приема поправок по частоте и шкале времени от предыдущего пункта, а два выхода блока усреднения и вычисления поправок по частоте и шкале времени, являясь выходами значений коррекции частоты и шкалы времени для данного пункта, подключены соответственно к управляющему входу опорного генератора и управляющему входу формирователя шкалы времени данного пункта.
Заявляемая система синхронизации частоты и шкалы времени удаленных пунктов отличается тем, в нее дополнительно в каждое устройство синхронизации каждого из М пунктов введены блок приема и преобразования навигационного сигнала, блок совместного измерения кодовой и фазовой псевдодальностей, блок коррекции тропосферной и ионосферной погрешностей, блок измерения отклонений частоты и шкалы времени, блок усреднения отклонений и вычисления поправок к частоте и шкале времени, блок приема поправок и блок передачи поправок, причем радиочастотный вход блока приема и преобразования навигационного сигнала является входом приема Р-частотного навигационного сигнала радиоканала с N навигационных космических аппаратов спутниковых радионавигационных систем, а управляющий вход является входом опорной частоты с первого выхода опорного генератора данного пункта, выход блока приема и преобразования навигационного сигнала, являющийся выходом преобразованного Р-частотного сигнала с N навигационных космических аппаратов спутниковых радионавигационных систем, соединен с первым входом блока совместного измерения кодовой и фазовой псевдодальностей между данным пунктом и каждым из N навигационных космических аппаратов спутниковых радионавигационных систем на каждой из Р передаваемых ими частот, второй вход блока совместного измерения кодовой и фазовой псевдодальностей является входом опорной частоты с первого выхода опорного генератора данного пункта, а третий вход блока совместного измерения кодовой и фазовой псевдодальностей является входом шкалы времени с выхода формирователя шкалы времени данного пункта, выход блока совместного измерения кодовой и фазовой псевдодальностей соединен с входом блока коррекции тропосферной и ионосферной погрешностей, выходом подключенного к первому входу блока измерения отклонений частоты и шкалы времени, второй вход которого является входом ввода точных координат данного пункта, первый выход блока измерения отклонений частоты и шкалы времени является входом блока передачи поправок к последующему пункту, а второй выход блока измерения отклонений частоты и шкалы времени является первым входом блока усреднения и вычисления поправок по частоте и шкале времени для данного пункта, второй вход блока усреднения и вычисления поправок по частоте и шкале времени подключен к выходу блока приема поправок по частоте и шкале времени от предыдущего пункта, а два выхода блока усреднения и вычисления поправок по частоте и шкале времени, являясь выходами значений коррекции частоты и шкалы времени для данного пункта, подключены соответственно к управляющему входу опорного генератора и управляющему входу формирователя шкалы времени данного пункта.
Дополнительное введение в каждое устройство синхронизации каждого из М пунктов блока приема и преобразования навигационного сигнала, блока совместного измерения кодовой и фазовой псевдодальностей, блока коррекции тропосферной и ионосферной погрешностей, блока измерения отклонений частоты и шкалы времени, блока усреднения отклонений и вычисления поправок к частоте и шкале времени, блока приема поправок и блока передачи поправок позволяет решить поставленную задачу повышения точности синхронизации частоты и шкалы времени удаленных пунктов.
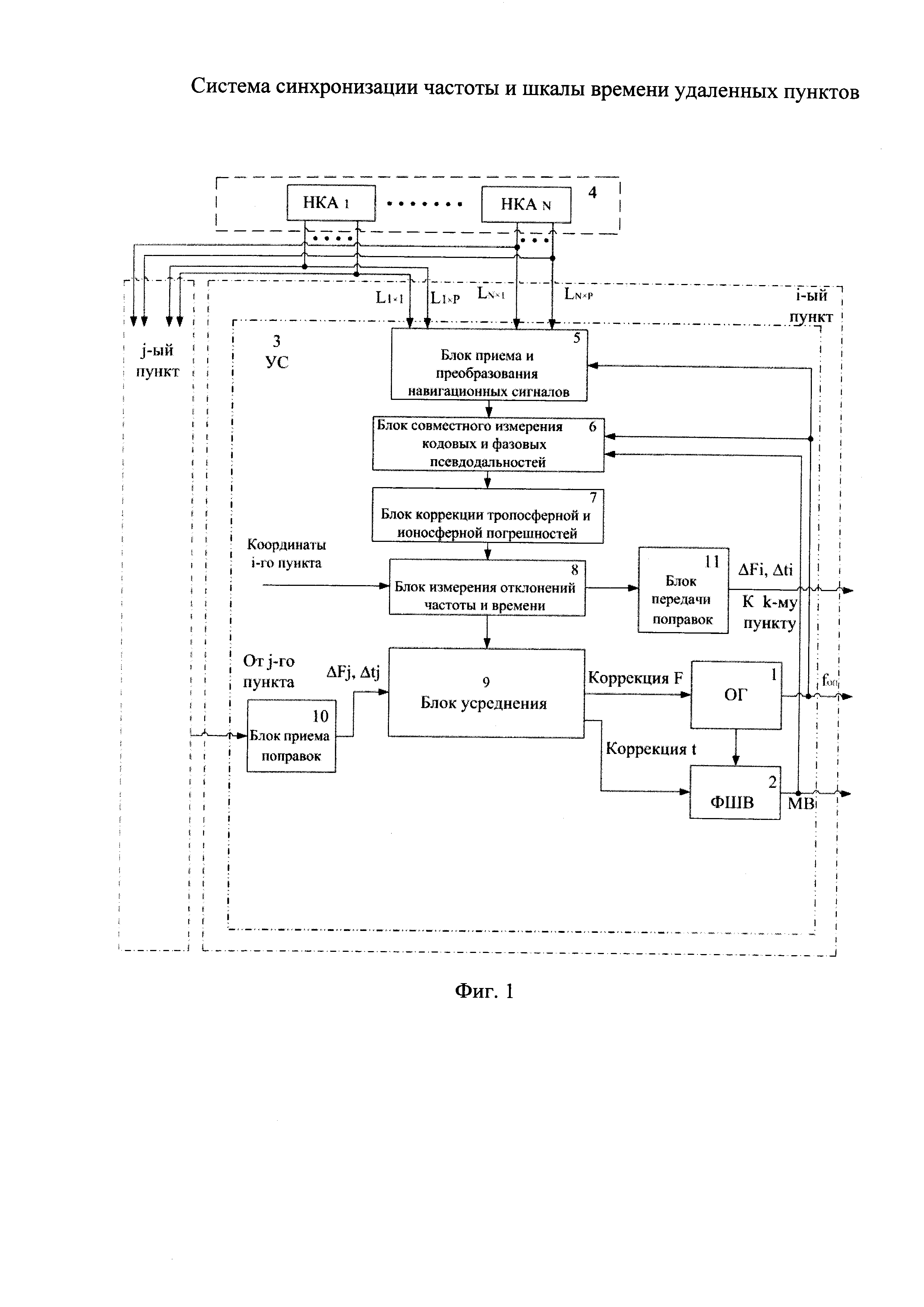
На фиг.1 приведена структурная схема предлагаемой системы.
Система содержит М синхронизируемых удаленных пунктов, из которых на схеме показаны синхронизируемый i-й пункт, синхронизирующий j-й пункт и N НКА 4 СРНС, соединенных посредством радиоканала на Р частотах с устройством синхронизации УС 3 каждого из М пунктов. Каждый удаленный пункт содержит, кроме УС 3, опорный генератор ОГ 1, тактовым выходом соединенный с формирователем шкалы времени ФШВ 2, выход которого и является выходом сигнала метки времени (MB) шкалы времени данного пункта. УС 3 содержит блок приема и преобразования навигационного сигнала 5, блок совместного измерения кодовой и фазовой псевдодальностей 6, блок коррекции тропосферной и ионосферной погрешностей 7, блок измерения отклонений частоты и шкалы времени 8 и блок усреднения отклонений и вычисления поправок к частоте и шкале времени 9, соединенные последовательно. Вход блока приема и преобразования навигационного сигнала 5 является радиочастотным входом УС 3. Второй вход блока измерения отклонений частоты и шкалы времени 8 является входом точных координат данного пункта (например, Xi, Yi, Zi), а второй выход блока измерения отклонений частоты и шкалы времени 8 соединен с входом блока передачи поправок 11 данного пункта (например, i-го). Второй вход блока усреднения отклонений и вычисления поправок к частоте и шкале времени 9 подключен к выходу блока приема поправок 10, вход которого соединен с выходом блока передачи поправок 11 другого пункта (например, j-го). Первый выход блока усреднения отклонений и вычисления поправок к частоте и шкале времени 9 подключен к управляющему входу ОГ 1, второй выход подключен к управляющему входу формирователя шкалы времени 2. Первый выход ОГ 1 также подключен к управляющим входам блока приема и преобразования навигационного сигнала 5 и блока совместного измерения кодовой и фазовой псевдодальностей 6, а выход ФШВ 2 также подключен ко второму управляющему входу блока совместного измерения кодовой и фазовой псевдодальностей 6.
Предлагаемая система работает следующим образом.
На вход устройства синхронизации 3, а именно на вход блока приема и преобразования навигационного сигнала 5, по радиоканалу поступает сигнал от N радиовидимых в данный момент НКА СРНС. В качестве СРНС могут выступать как действующие в настоящее время ГЛОНАСС и GPS, так и проектируемые (Galileo и др.). Сигнал поступает в общем случае на Р частотах, так как наличие нескольких частот и их совместная обработка снижают погрешности навигационных и частотно-временных измерений, в частности, обусловленных влиянием ионосферы Земли.
В блоке приема и преобразования навигационного сигнала 5 принятый сигнал фильтруется, переносится на более низкую частоту и преобразуется в цифровую форму для дальнейшей обработки. Далее в блоке совместного измерения кодовых и фазовых псевдодальностей (ПД) 6 производится не только измерение кодовой ПД, как в известных системах, но и измерение фазовой ПД, т.е., по сути, измерение несущей частоты с точностью до фазы. При этом измерения производятся непрерывно, что позволяет вычислять не только текущие значения кодовой и фазовой ПД, но и их приращения за короткие интервалы времени. Как известно, для оценки расстояния до источника излучения фазовым методом характерна проблема неоднозначности измерений, так как неизвестно количество целых периодов частоты, уложившихся на данном расстоянии до точки, в которой измеряется остаток от периода данной частоты (фаза сигнала). В то же время измерение временной задержки прихода кодовой последовательности лишено этой неоднозначности, но подвержено влиянию шумов и других дестабилизирующих факторов.
Применение совместного измерения кодовых и фазовых ПД позволяет устранить неоднозначность измерения фазы несущей частоты за счет даже грубой оценки кодовой ПД, а знание точного значения приращения псевдодальности, измеренного по приращению фазы несущей частоты, позволяет существенно уменьшить полосу пропускания фильтра при измерениях кодовой ПД, что, естественно, приводит к уменьшению влияния шумов и других дестабилизирующих факторов на оценку кодовой ПД. Так как кодовая последовательность передается на каждой из Р частот каждого из N НКА, то совместное измерение кодовых и фазовых ПД производится в блоке 6 по каждой частоте каждого спутника.
Дальнейшее снижение погрешности измеренных P×N кодовых и фазовых ПД производится в блоке коррекции тропосферной и ионосферной погрешностей 7. Тропосферная погрешность может корректироваться одним из известных методов с использованием различных моделей тропосферы или с помощью статистических данных о характере тропосферы в данном месте.
Ионосферная погрешность уменьшается за счет совместной оценки рассогласования кодовой и фазовой ПД на каждой из Р частот одного НКА на некотором интервале времени. Это рассогласование и будет обусловлено изменением задержки сигнала в ионосфере в зависимости от частоты. Измеряя, например, приращения фазовой ПД на разных частотах за один интервал времени по N НКА, можно рассчитать поправки к кодовой ПД до каждого НКА и повысить точность последующей синхронизации.
Полученные значения кодовой и фазовой ПД позволяют определить отклонения между частотой и шкалой времени НКА СРНС и данным i-м пунктом (ΔFi(N×P) и ΔTi(N×P)). Эти измерения производятся в блоке измерения отклонений частоты и времени 8. Измерения производятся по каждому из N радиовидимых НКА на каждой и Р частот. В случае исправности и синхронности всех бортовых генераторов НКА и синхронности данного i-го пункта эти отклонения стремятся к нулю. С целью уменьшения такой составляющей погрешности, как погрешность из-за переотражения (многолучевости) навигационного сигнала НКА от поверхности Земли, близких объектов или элементов конструкции самого пункта, на второй вход блока измерения отклонений частоты и времени 8 поступают точные координаты места расположения данного i-го пункта (например, Xi, Yi, Zi). Это позволяет, зная текущее время, использовать служебную информацию СРНС и, следовательно, положение каждого НКА над горизонтом. Те НКА, которые имеют низкое положение над горизонтом либо «неудачное» с точки зрения прилегающего рельефа и дающие максимальное переотражение, могут быть исключены из процесса формирования отклонений частоты и времени. Тем самым точность синхронизации будет повышаться.
Для обеспечения удаленной синхронизации следующего пункта полученные отклонения частоты и времени (ΔFi(N×P) и ΔTi(N×P)) с выхода блока измерения отклонений частоты и времени 8 поступают на блок передачи поправок 11 для передачи их на следующий, например k-й, пункт.
Блок усреднения отклонений и вычисления поправок к частоте и шкале времени 9 получает отклонения частоты и времени данного i-го пункта на первый вход и предыдущего j-го пункта (ΔFj(N×P) и ΔTj(N×P)), поступающие на второй вход с выхода блока приема поправок 10. В блоке 9 производится выбор тех отклонений, которые соответствуют одновременно K радиовидимым НКА с данного i-го пункта и j-го пункта (где K≤N). Применяя дифференциальный метод для исключения влияния нестабильности бортовых генераторов, в блоке 9 вычисляются разности между отклонениями частоты и шкалы времени данного i-го пункта и предыдущего j-го пункта по каждому К совместно радиовидимому НКА на каждой из Р излучаемой ими частоте. Далее все разности усредняются по всему ансамблю (K×P) и формируются корректирующие поправки по частоте (ΔFi) и шкале времени (ΔTi) для данного i-го пункта относительно предыдущего j-го. Если в качестве предыдущего j-го пункта выступает эталонный источник частоты и временной шкалы (или пункт, ранее синхронизированный с эталоном), то и данный i-й пункт после коррекции будет синхронизирован с эталоном. Корректирующие поправки ΔFi, ΔTi с выхода блока 9 поступают на управляющие входы соответственно ОГ 1 и ФШВ 2. Выходы этих блоков и являются соответственно выходами высокостабильной опорной частоты и сигнала высокоточной метки времени для потребителей данного i-го пункта, в том числе и для блоков внутри данного пункта.
Таким образом, предлагаемая система позволяет провести удаленную синхронизацию любого пункта в автоматическом непрерывном режиме с погрешностью, близкой к минимально возможной, и за короткий интервал времени. Использование известных координат места расположения пункта, цифровой обработки сигналов, высокоточных фазовых измерений, совместной оценки фазовых и кодовых ПД по большому количеству сигналов и наличие значительных вычислительных мощностей позволяет проводить описанную выше синхронизацию частоты и шкалы времени за короткий интервал времени (порядка 1-100 с), не давая частоте ОГ 1 пункта значительно отклониться за счет присущей ОГ 1 нестабильности, и проводить такую синхронизацию практически постоянно в течение суток.
В предлагаемой системе на основе комплексного подхода минимизированы все основные составляющие погрешности синхронизации (систематические и случайные), которые присутствуют в известных системах синхронизации частоты и шкалы времени удаленных пунктов с использованием СРНС. Влияние нестабильности бортовых стандартов частоты НКА отсутствует благодаря применению дифференциального метода измерения, при котором значение частоты бортового стандарта вычитается при вычислении корректирующих поправок. Влияние ионосферы минимизируется одновременной обработкой нескольких частот, излучаемых НКА, и совместной обработкой кодового сигнала и фазы несущей частоты. Влияние тропосферы минимизируется корректирующими методами с учетом знания координат места расположения пункта. Влияние многолучевости минимизируется с учетом знания координат и положения НКА над горизонтом. Случайная погрешность измерения кодовой ПД существенно снижается за счет совместного измерения кодовой и фазовой ПД и последующего усреднения всех разностей отклонений частоты и шкалы времени как минимум в  раз.
раз.
При этом уменьшение перечисленных погрешностей и вычисление корректирующих поправок не требует значительного времени, как в известных системах.
Используемые в предлагаемой системе узлы и блоки могут быть реализованы следующим образом.
Блок приема и преобразования навигационных сигналов 5 может быть реализован на базе стандартного блока радиоканала для приема сигналов СРНС ГЛОНАСС/GPS/Calileo, с увеличением числа каналов приема и обработки до N×P. Возможно также использование технического решения из патента RU №2425393 [4] с использованием единого канала приема и преобразования для различных сигналов путем формирования группового сигнала с помощью дополнительной модуляцией специальными ортогональными функциями. Блоки совместного измерения кодовых и фазовых ПД 6, блок коррекции тропосферной и ионосферной погрешностей 7, блок измерения отклонений частоты и шкалы времени 8 и блок усреднения отклонений и вычислении поправок к частоте и шкале времени 9 могут быть реализованы на базе стандартной микроЭВМ с аналого-цифровыми преобразователями на входе и с соответствующим программным обеспечением, реализующим описанные выше алгоритмы обработки сигнала. Блоки приема и передачи поправок могут быть реализованы на базе стандартных интерфейсных схем и схем приема и передачи сигнала в зависимости от принятого способа передачи поправок - проводная связь, сеть Интернет, радиоканал, спутниковый канал связи и т.п.
Технико-экономический эффект предлагаемой системы заключается прежде всего в отсутствии необходимости перемещения в целях синхронизации ОГ удаленного пункта к месту нахождения эталонного стандарта частоты и времени или эталонного стандарта к месту нахождения удаленного пункта. Часто это технически невозможно или чрезвычайно экономически затратно, например, если удаленный пункт находится в Антарктиде, Африке или Южной Америке. Предлагаемая система позволяет провести удаленную синхронизацию ОГ удаленного пункта с периодичностью, исключающей значительные смещения частоты ОГ и соответственно шкалы времени удаленного пункта с погрешностью, близкой к минимально возможной, сопоставимой со стабильностью частоты в СРНС и системах мирового единого времени (порядка 10-12-10-13 по частоте и 1-2 нс по времени) на коротких интервалах (десятки секунд). При увеличении времени синхронизации до нескольких часов погрешность синхронизации частоты и шкалы времени может быть уменьшена еще на порядок.
Такие значения погрешностей синхронизации частоты и шкалы времени возможно достигнуть только при комплексном учете и компенсации всех значимых составляющих погрешностей синхронизации, приема и обработки сигналов всех частот от максимально возможного количества НКА различных СРНС, применения высокоточных фазовых измерений и применения известного дифференциального метода расчета поправок ко всем результатам измерений частоты и отклонений шкалы времени по соседним пунктам. Такой подход отсутствует в известных технических решениях, в том числе и в системе-прототипе, что приводит к росту погрешностей синхронизации в них как минимум на порядок при увеличении интервалов времени синхронизации до нескольких часов. В этом и заключается технико-экономический эффект предлагаемой системы синхронизации частоты и шкалы времени удаленных пунктов.
Литература
1. Пат. РФ 2037172, кл. G04C 13/00, 13/02, опубл. 09.06.95.
2. Пат. РФ 2133489, кл. G04C 11/02, 13/00, опубл. 20.07.99.
3. Сетевые спутниковые радионавигационные системы. / B.C. Шебшаевич, П.П. Дмитриев, Н.В. Иванцевич и др. / Под ред. B.C. Шебшаевича. - М.: Радио и связь, 1993, с. 255…257, рис. 17.1, рис. 17.2 (прототип).
4. Пат. РФ 2425393, опубл. 27.07.2011, Бюл. №21.
Система синхронизации частоты и шкалы времени удаленных пунктов, содержащая N навигационных космических аппаратов спутниковых радионавигационных систем и М пространственно разнесенных пунктов, каждый из которых содержит последовательно соединенные опорный генератор, первый выход которого является выходом опорной частоты данного пункта, и формирователь шкалы времени, выход которого является выходом шкалы времени данного пункта, первый вход формирователя шкалы времени является входом тактовой частоты со второго выхода опорного генератора, а также устройство синхронизации, которое посредством навигационного радиоканала связано с N навигационными космическими аппаратами спутниковых радионавигационных систем, отличающаяся тем, что в каждое устройство синхронизации каждого из М пунктов введены блок приема и преобразования навигационного сигнала, блок совместного измерения кодовой и фазовой псевдодальностей, блок коррекции тропосферной и ионосферной погрешностей, блок измерения отклонений частоты и шкалы времени, блок усреднения отклонений и вычисления поправок к частоте и шкале времени, блок приема поправок и блок передачи поправок, причем радиочастотный вход блока приема и преобразования навигационного сигнала является входом приема Р-частотного навигационного сигнала радиоканала с N навигационных космических аппаратов спутниковых радионавигационных систем, а управляющий вход является входом опорной частоты с первого выхода опорного генератора данного пункта, выход блока приема и преобразования навигационного сигнала, являющийся выходом преобразованного Р-частотного сигнала с N навигационных космических аппаратов спутниковых радионавигационных систем, соединен с первым входом блока совместного измерения кодовой и фазовой псевдодальностей между данным пунктом и каждым из N навигационных космических аппаратов спутниковых радионавигационных систем на каждой из Р передаваемых ими частот, второй вход блока совместного измерения кодовой и фазовой псевдодальностей является входом опорной частоты с первого выхода опорного генератора данного пункта, а третий вход блока совместного измерения кодовой и фазовой псевдодальностей является входом шкалы времени с выхода формирователя шкалы времени данного пункта, выход блока совместного измерения кодовой и фазовой псевдодальностей соединен с входом блока коррекции тропосферной и ионосферной погрешностей, выходом подключенного к первому входу блока измерения отклонений частоты и шкалы времени, второй вход которого является входом ввода точных координат данного пункта, первый выход блока измерения отклонений частоты и шкалы времени является входом блока передачи поправок к последующему пункту, а второй выход блока измерения отклонений частоты и шкалы времени является первым входом блока усреднения и вычисления поправок по частоте и шкале времени для данного пункта, второй вход блока усреднения и вычисления поправок по частоте и шкале времени подключен к выходу блока приема поправок по частоте и шкале времени от предыдущего пункта, а два выхода блока усреднения и вычисления поправок по частоте и шкале времени, являясь выходами значений коррекции частоты и шкалы времени для данного пункта, подключены соответственно к управляющему входу опорного генератора и управляющему входу формирователя шкалы времени данного пункта.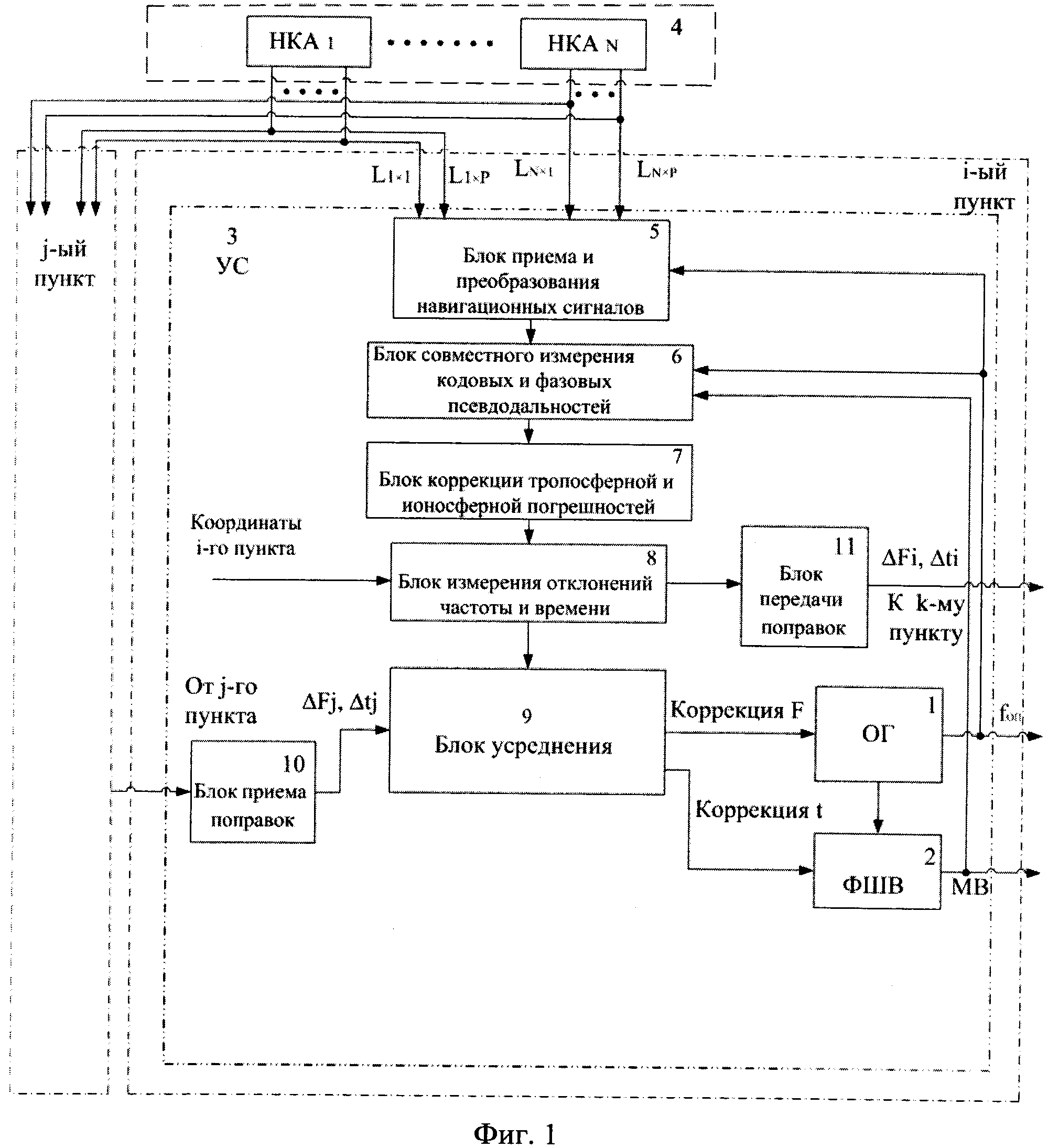
Микрополосковый широкополосный полосно-пропускающий фильтр
Устройство для определения пространственной ориентации объекта
Шпиндельный узел (варианты)
Лазерный ракетный двигатель (варианты)
Полосковый резонатор
Многослойный полосно-пропускающий фильтр
Широкополосный полосно-пропускающий фильтр
Шпиндельный узел
Фторированные 4-фурфурил-3,4-дигидро-2н-бензо[1,4]тиазин-1,1-диоксиды, обладающие высокой аритмической активностью
4-арил(гетарил)метил-замещенные 8-циклопентиламино-5,7-дифтор-3,4-дигидро-2н-бензо[1,4]тиазин-1,1-диоксиды, обладающие гипертензивным действием
Микрополосковый широкополосный полосно-пропускающий фильтр
Устройство для определения пространственной ориентации объекта
Шпиндельный узел (варианты)
Лазерный ракетный двигатель (варианты)
Полосковый резонатор
Многослойный полосно-пропускающий фильтр
Широкополосный полосно-пропускающий фильтр
Шпиндельный узел
Фторированные 4-фурфурил-3,4-дигидро-2н-бензо[1,4]тиазин-1,1-диоксиды, обладающие высокой аритмической активностью
4-арил(гетарил)метил-замещенные 8-циклопентиламино-5,7-дифтор-3,4-дигидро-2н-бензо[1,4]тиазин-1,1-диоксиды, обладающие гипертензивным действием

