Результат интеллектуальной деятельности: КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ
Вид РИД
Изобретение
Изобретение относится к способам и устройствам обнаружения и обезвреживания малогабаритных беспилотных летательных аппаратов (МБПЛА).
Известны и широко применяются различные активные и пассивные способы и устройства обнаружения и обезвреживания МБПЛА, попавших в охраняемую зону [1, 2].
Недостатки известных устройств заключаются в ограниченных функциональных возможностях, отсутствии мобильности, невозможности обезвреживания (устранения) и транспортировки беспилотных летательных аппаратов (БПЛА-нарушителей), попавших в охраняемую зону.
В качестве прототипа рассмотрим изобретение «Система управления комплексными методами борьбы с малогабаритными беспилотными летательными аппаратами», которые содержат две системы поражения, систему управления боевой частью, пакет направляющих, ракету, систему обнаружения и прицеливания, систему навигации и топопривязки, систему скрытости, систему обработки формирования команд с элементами искусственного интеллекта, БПЛА с элементами борьбы с БПЛА-нарушителем, систему электронного захвата и блок питания [3].
Недостатки системы заключаются в низкой точности определения координат местоположения объекта (транспортного наземного средства, БПЛА-нарушителя), отсутствии одновременно автоматического и автоматизированного режимов функционирования, низком быстродействии, низкой эффективности подавления БПЛА-нарушителя, малой маневренности (развертываемости) комплекса охраны и низких функциональных возможностях системы контроля охраняемой территории от всех видов БПЛА-нарушителей, обезвреживания, захвата и транспортировки в специальную зону БПЛА-нарушителей, плохой адаптации к изменяющейся ветровой обстановке.
Задачей является создание интеллектуального комплекса распределенного управления для борьбы с малогабаритными БПЛА с улучшенными функциональными возможностями за счет повышения быстродействия, маневренности, оперативности БПЛА-охотников и наземных транспортных средств, точности распознавания и определения координат БПЛА-нарушителей, реализации автоматического и автоматизированного режимов работы, обеспечение удобства обслуживания.
Поставленная задача достигается тем, что, как и известное устройство, заявленный комплекс распределенного управления содержит БПЛА-охотник 17, блок поиска БПЛА-нарушителя 2, средства захвата или ликвидации БПЛА-нарушителя, блок питания.
Новым является то, что комплекс оборудован комплектом мобильных наземных роботов высокой проходимости (МНРВП) 1, способных транспортировать несколько БПЛА-охотников, тепловизором 3, интеллектуальным распознавателем (ИР) 4, 3D цветной видеокамерой (3DЦВ) 5, направленным микрофоном с встроенной видеокамерой изменяемого увеличения и перестраиваемым лазером (НМВВИУПР) 6, камерой ночного видения (КНВ) 7, блоком позиционирования по горизонту (БПГ) 8, блоком позиционирования по наклону (БПН) 9. интеллектуальным навигационным блоком (ИНБ) 10, блоком управления радиоэлектронной борьбой (БУРБ) 11, блоком подавления сигналов управления (БПСУ) 12, блоком подавления сигналов навигации (БПСН) 13, блоком подавления сигналов телеметрии (БПСТ) 14, блоком подавления видеосигнала (БПВ) 15, блоком экстренной ликвидации БПЛА-нарушителя (БЭЛ) 16, измерителем направления и скорости ветра (ИНСВ) 20, универсальным пультом управления (УПУ) 21, компьютеризированным центральным пультом управления (КЦПУ) 22, блоком памяти (БП) 24 и блоком мониторинга территории (БМТ) 26.
При этом:
(а) БПЛА-охотник 17 оборудован блоком мониторинга территории (БМТ) 26 с контроллером, измерителем направления и скорости ветра (ИНСВ) 20 и мехатронной сеткой захвата БПЛА-нарушителя (МСЗ) 19 в форме цилиндра с обручем;
(б) каждый мобильный наземный робот 1 снабжен универсальным блоком питания 25 и связан отдельными двунаправленными линиями связи с процессором БПЛА-охотника 17, с блоком поиска БПЛА-нарушителя 2, с интеллектуальным навигационным блоком (ИНБ) 10, с блоком управления радиоэлектронной борьбы (БУРБ) 11, с универсальным пультом управления (УПУ) 21 и с компьютеризированным центральным пультом управления (КЦПУ) 22;
(в) блок поиска БПЛА-нарушителя 2 связан отдельными двунаправленными линиями связи с тепловизором 3, с интеллектуальным распознавателем (ИР) 4, подключенным, в свою очередь, к блоку мониторинга территории (БМТ) 26, с 3D цветной видеокамерой (3DЦВ) 5, с направленным микрофоном (НМВВИУПР) 6, с камерой ночного видения (КНВ) 7, с блоком позиционирования по горизонту (БПГ) 8, с блоком позиционирования по наклону (БПН) 9 и имеет возможность обмена информацией с космическим спутником 23;
(г) блок управления радиоэлектронной борьбы (БУРБ) 11 связан отдельными двунаправленными линиями связи с блоком подавления сигналов управления (БПСУ) 12, с блоком подавления сигналов навигации (БПСН) 13, с блоком подавления сигналов телеметрии (БПСТ) 14, с блоком подавления видеосигнала (БПВ) 15 и с блоком экстренной ликвидации БПЛА-нарушителя (БЭЛ) 16.
В частных случаях исполнения упомянутый БПЛА-охотник может быть выполнен в виде дрона, который содержит центральный блок управления, блок визуальных датчиков и датчиков расстояния, модуль навигации, радиопередатчик, инерциальную навигационную систему, драйверы двигателей и двигатели с пропеллерами.
Кроме того, упомянутый комплект мобильных наземных роботов высокой проходимости включает от 5 до 10 мобильных роботов, каждый из которых содержит корпус, раму, левое и правое гусеничное шасси, левый и правый двигатели с редукторами, блок управления двигателем, передние и задние фары, цифровой блок получения и передачи телеметрической информации, причем верхняя часть корпуса содержит зоны-платформы для размещения БПЛА-охотников или транспортировки обезвреженных БПЛА-нарушителей.
В частных случаях исполнения комплекса распределенного управления упомянутый интеллектуальный распознаватель 4 может быть выполнен в виде динамически структурно-перестраиваемой нейронной сети и интерфейса.
Кроме того, упомянутый универсальный блок питания 25 может быть выполнен в составе узла подзарядки, аккумулятора, блока солнечных батарей и ветряного миниэнергоблока.
Кроме того, упомянутый блок мониторинга территории 26 может содержать анализатор химических и радиационных веществ, искатель взрывчатых веществ, блок электронной разметки территории, индикаторы разметки территории, блок установки индикаторов разметки территории, процессор управления и интерфейс.
Кроме того, упомянутый интеллектуальный навигационный блок 10 может быть выполнен в виде блока интерфейсов, преобразователя сигналов, интеллектуального контроллера управления, блока навигационных датчиков и оперативного запоминающего устройства.
Кроме того, комплекс может быть оборудован средствами поиска и сопровождения БПЛА-нарушителя в видимом, инфракрасном, звуковом, лазерном режиме, которые управляются блоком позиционирования по горизонту 8 и блоком позиционирования по наклону 9.
Кроме того, обезвреживание БПЛА-нарушителей осуществляется подавлением сигналов управления в радиочастотном диапазоне, сигналов навигации, телеметрии и видеосигналов блоками 12, 13, 14. 15 или мощным лазерным излучением НМВВИУПР 6.
Кроме того, упомянутая мехатронная сетка захвата МСЗ 19 может быть оборудована парашютом для спуска на поверхность земли обезвреженного БПЛА-нарушителя.
Предлагаемый комплекс иллюстрируется чертежами на фиг. 1-10.
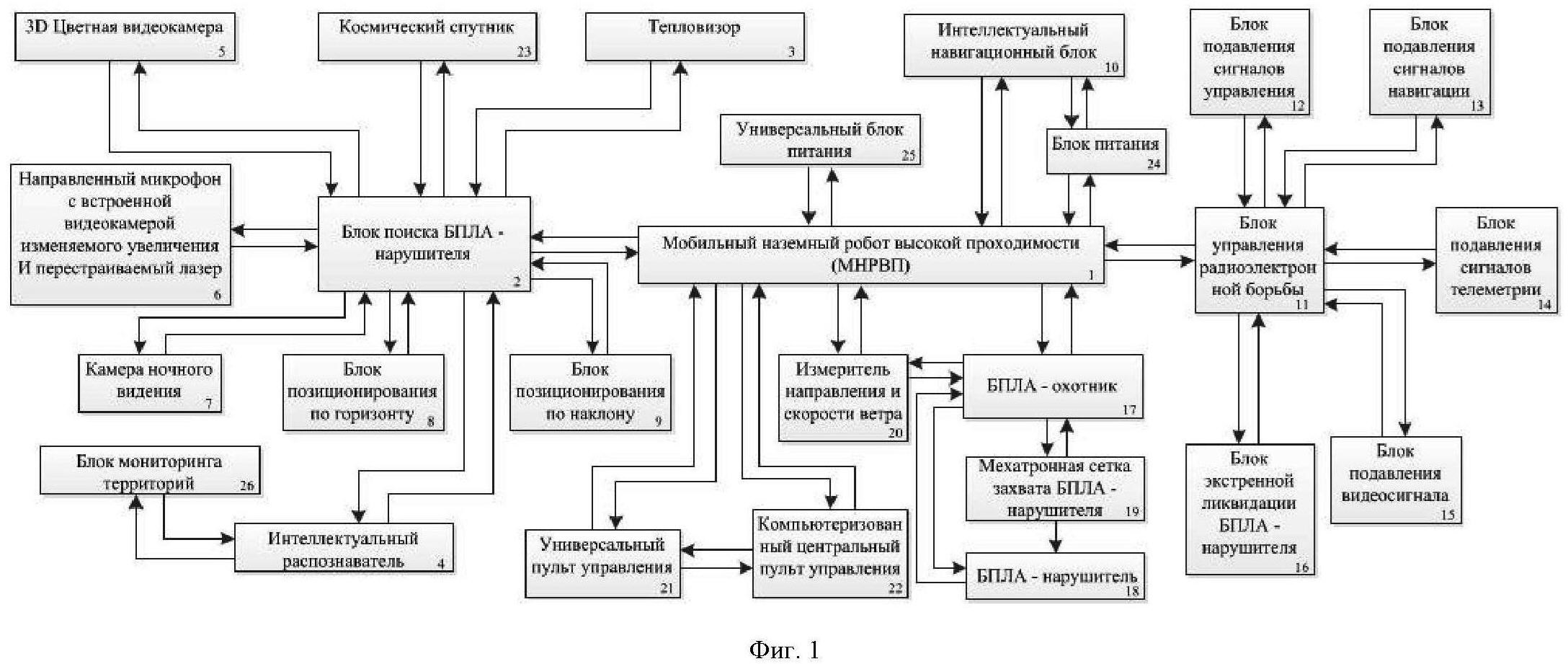
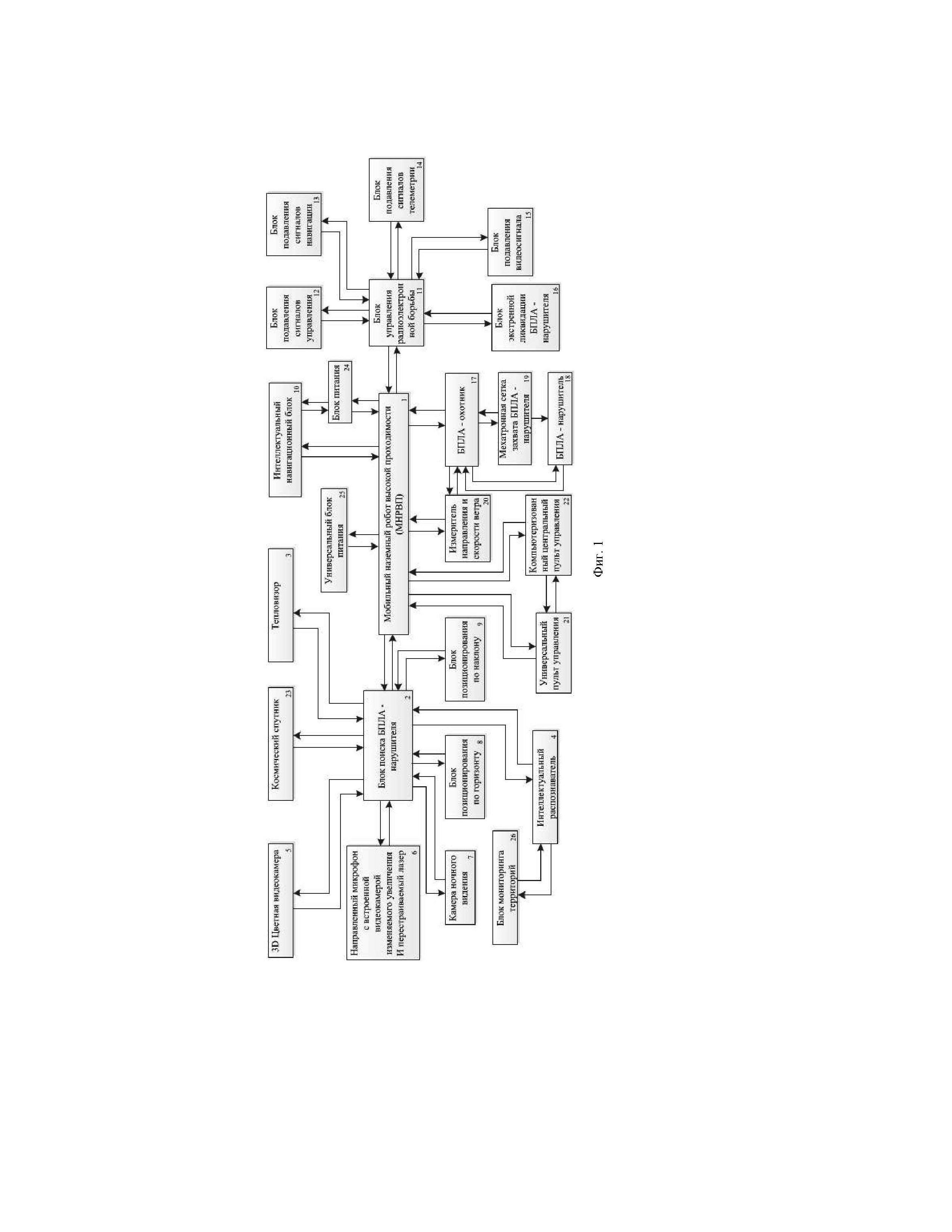
На фиг. 1 представлена структурная схема предлагаемого комплекса.
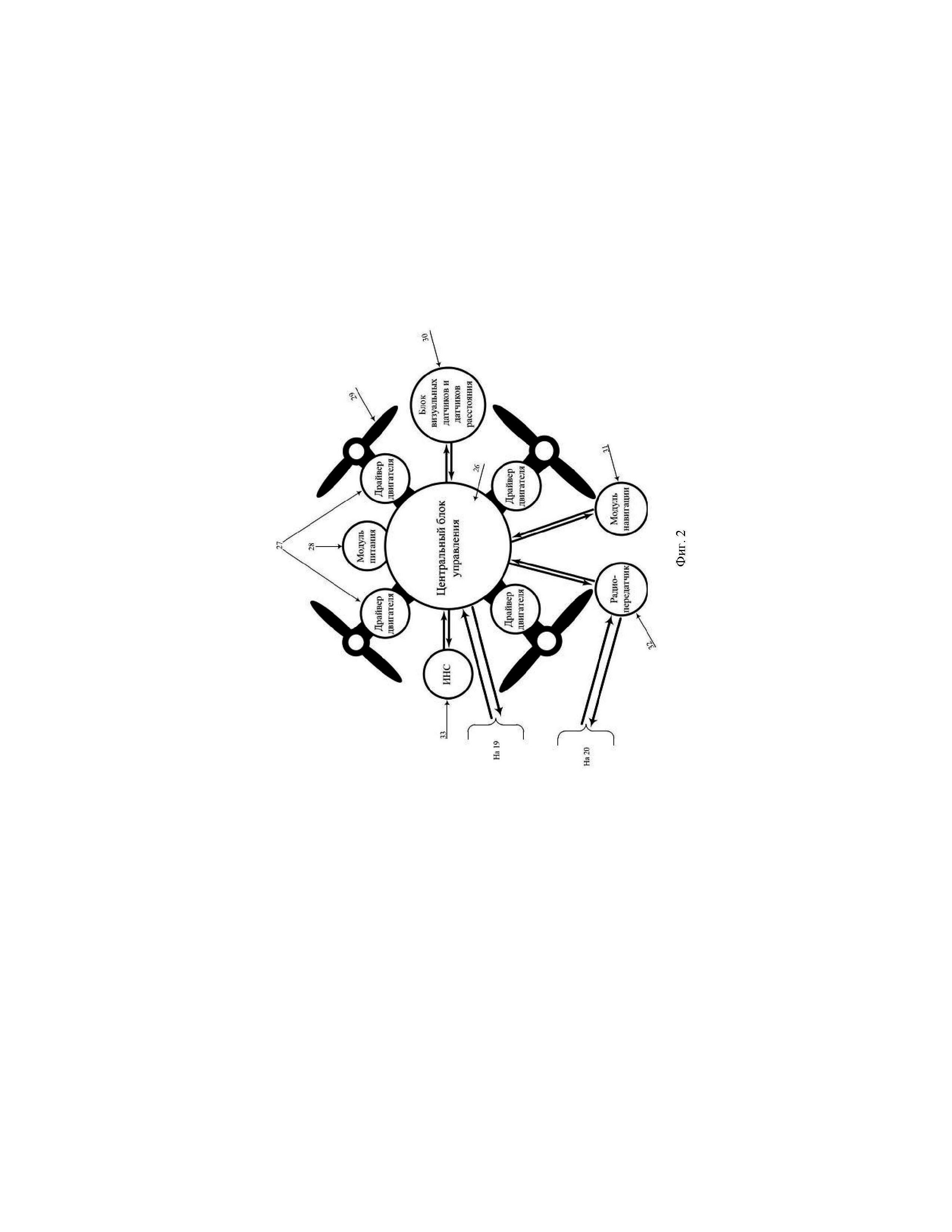
На фиг. 2 приведена схема БПЛА-охотника.
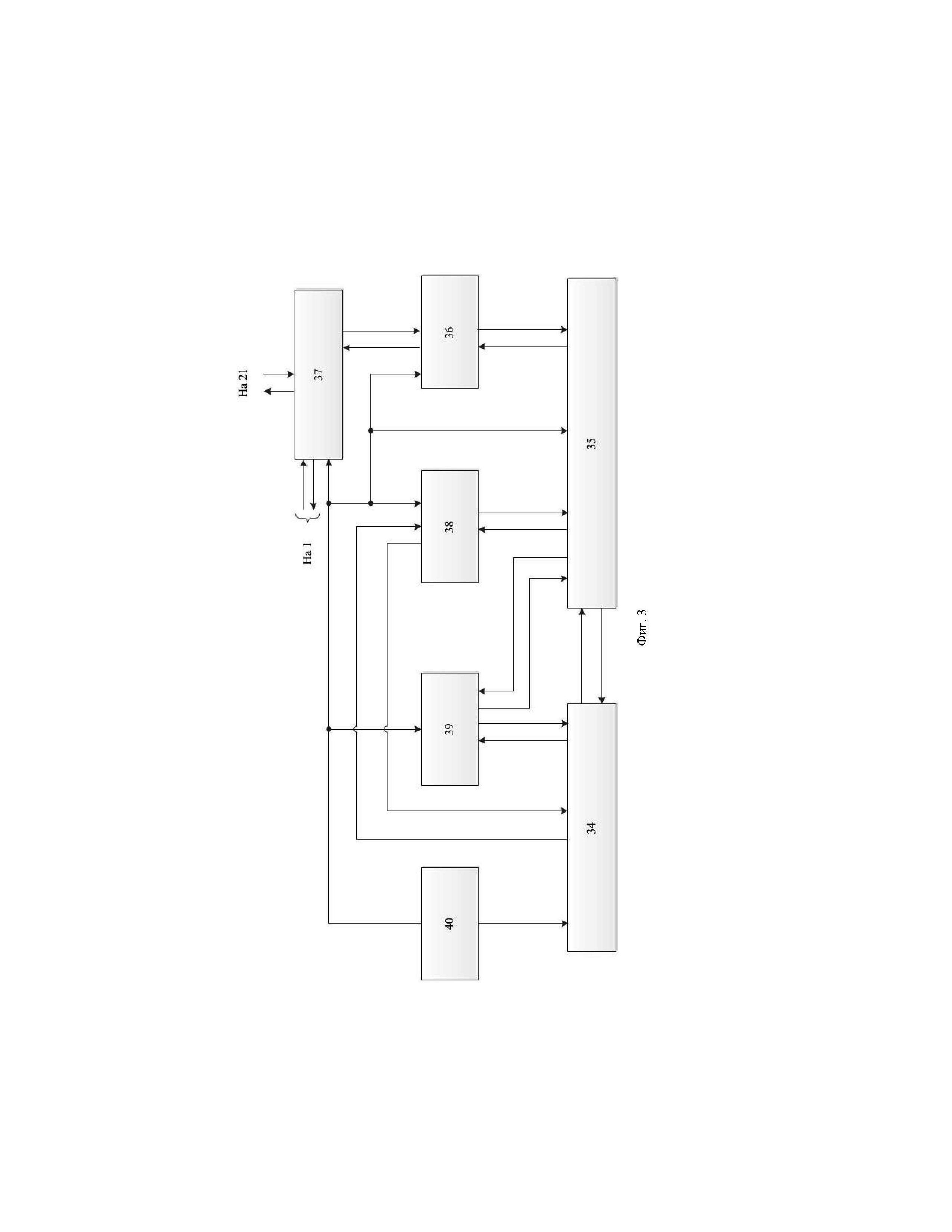
На фиг. 3 представлена структурная схема компьютеризированного центрального пульта управления.
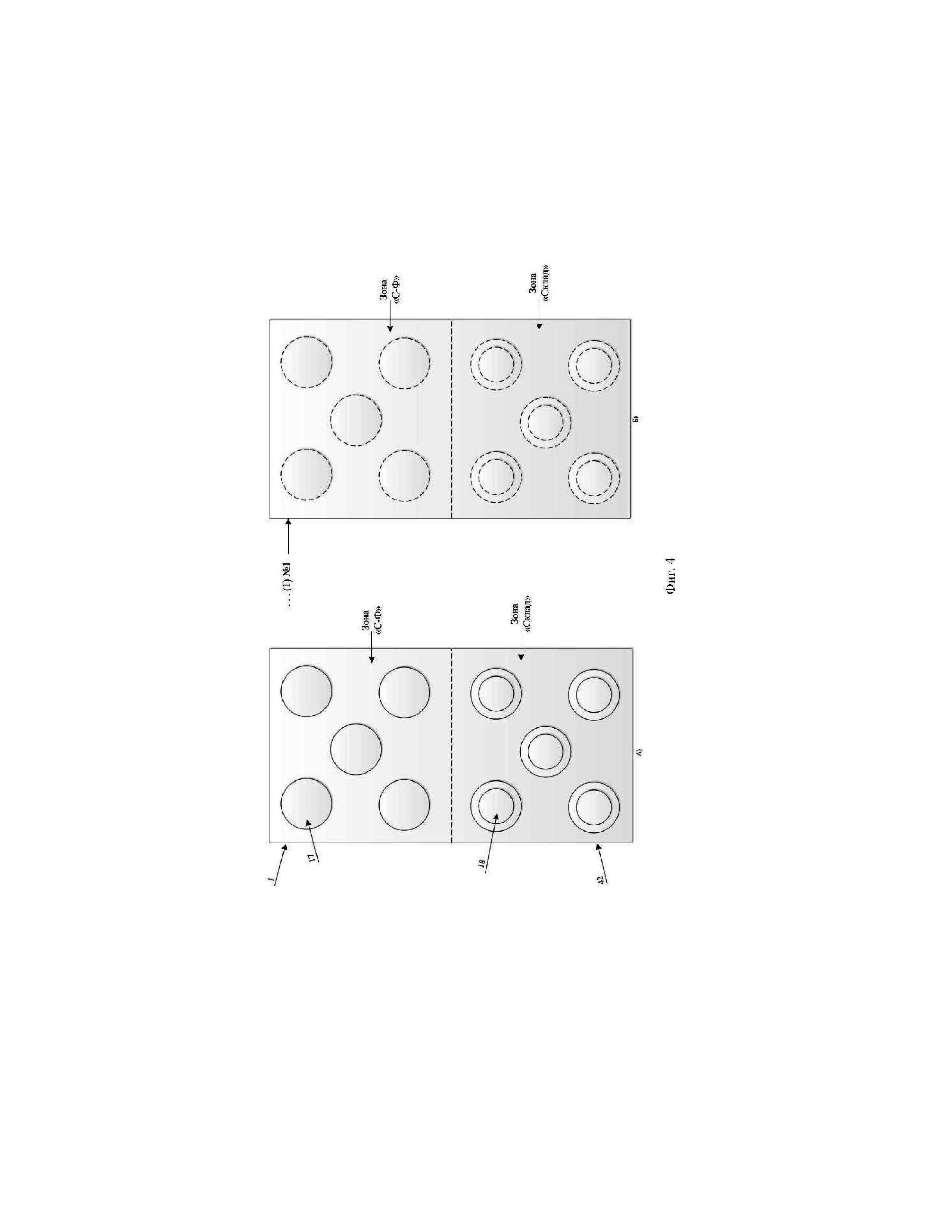
На фиг. 4 дана схема расположения комплекта БПЛА.
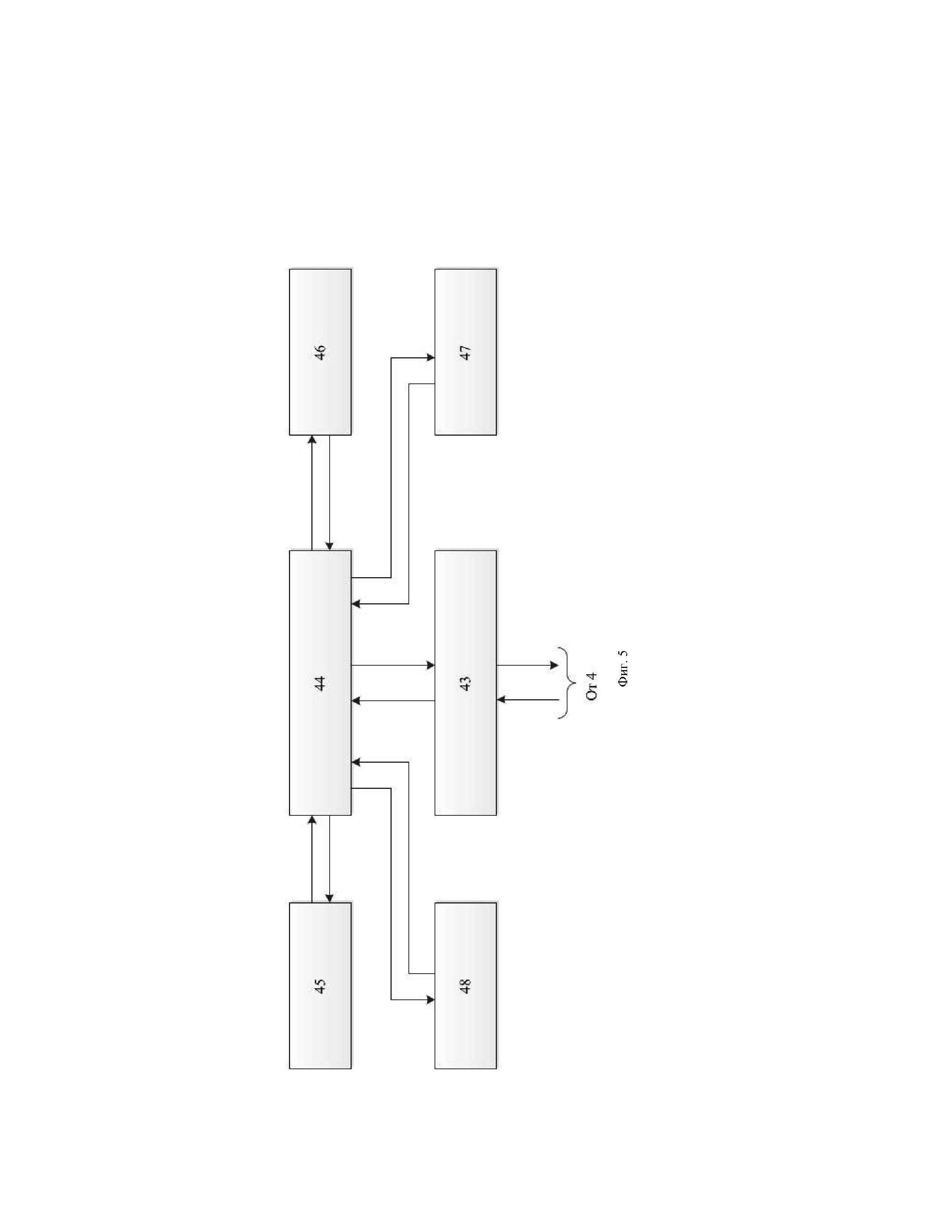
На фиг. 5 представлена структурная схема блока мониторинга территории.
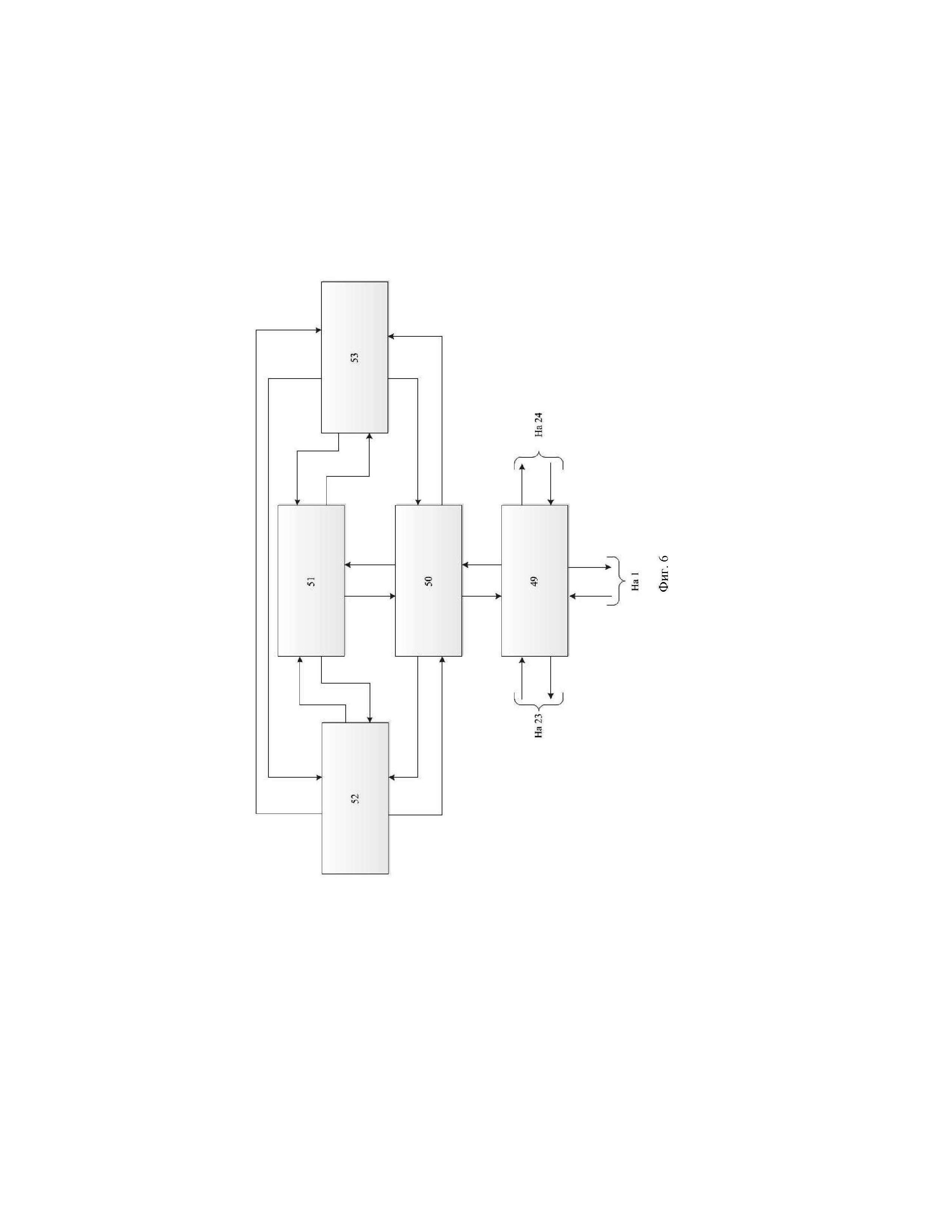
На фиг. 6 дана структурная схема интеллектуального навигационного блока.
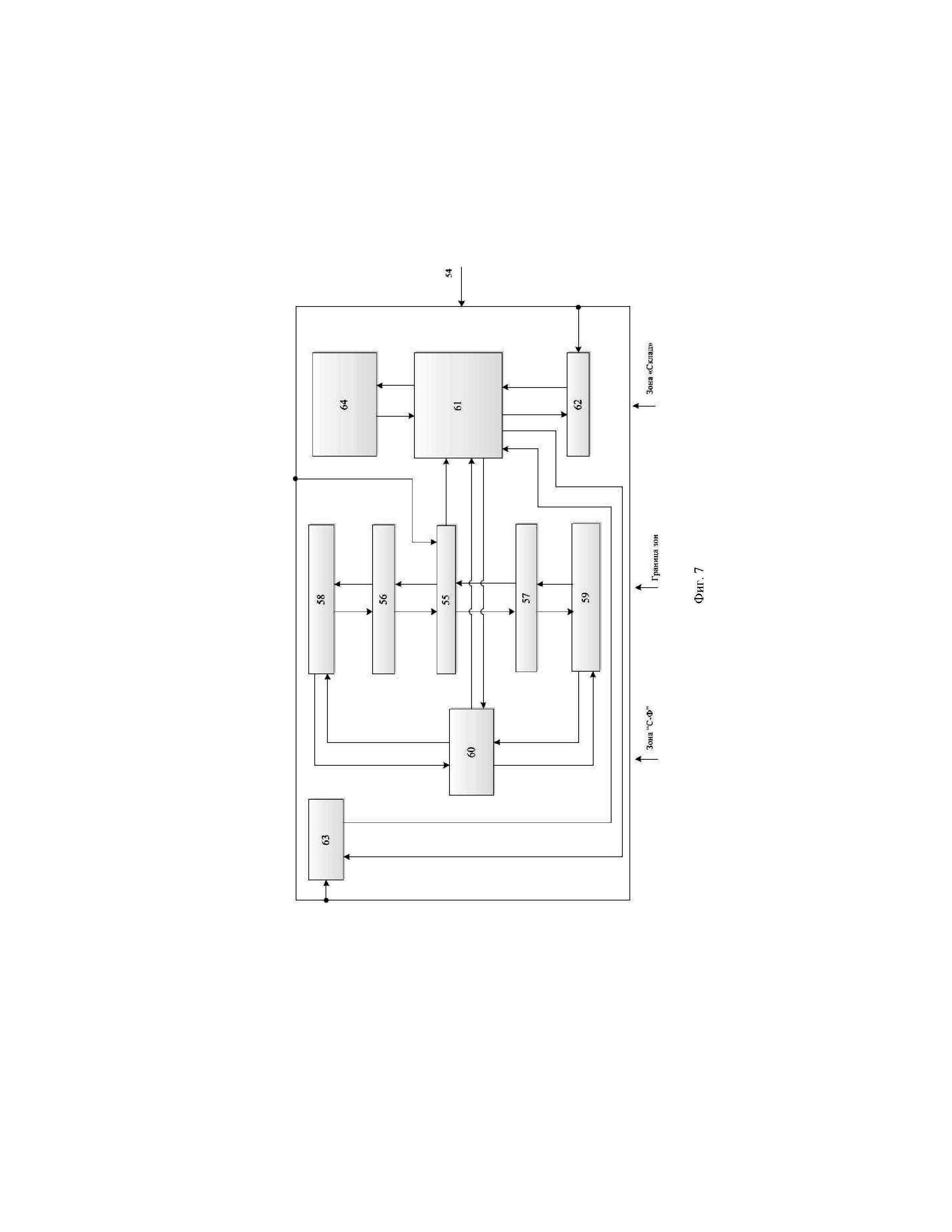
На фиг. 7 представлена структурная схема мобильного наземного робота высокой проходимости.
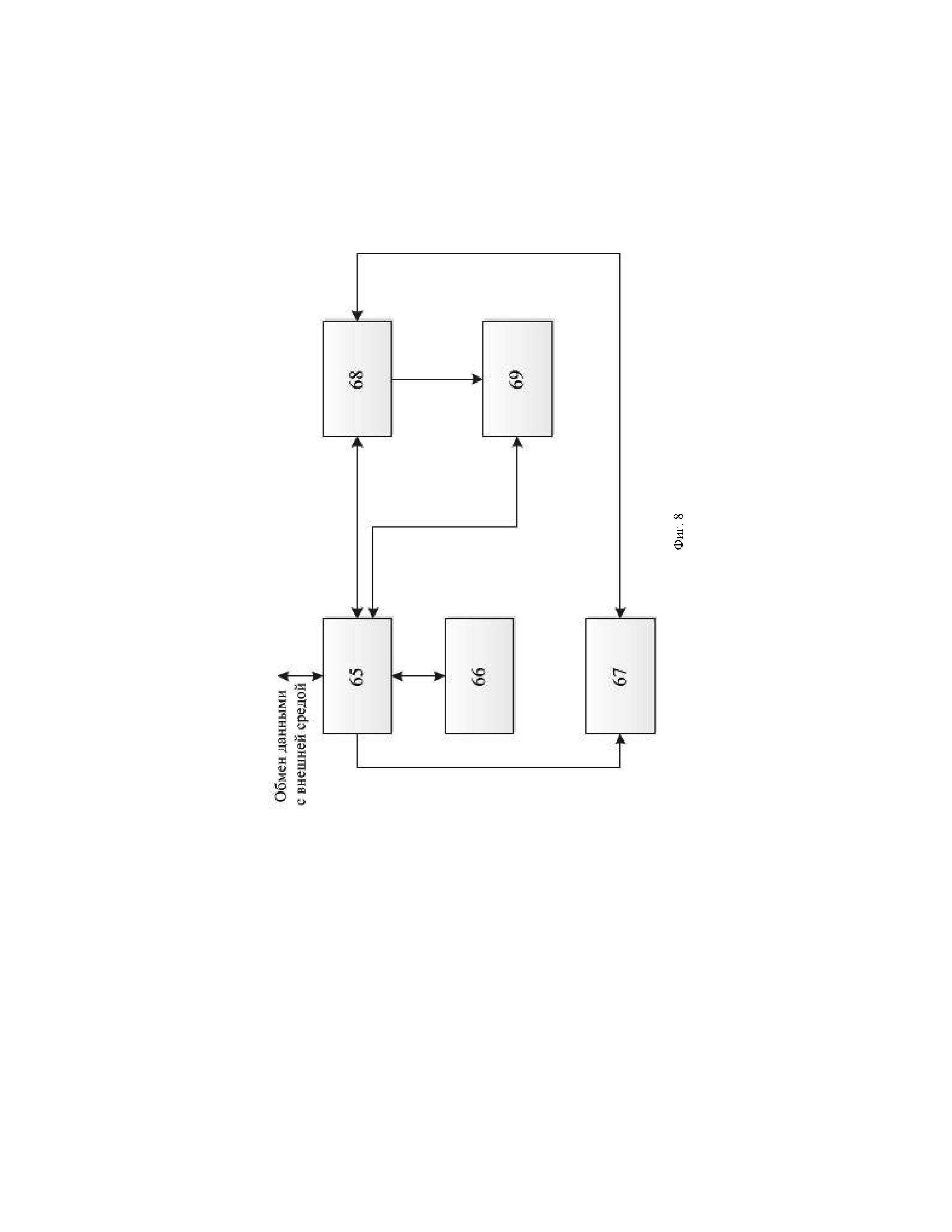
На фиг. 8 приведена структурная схема интеллектуального распознавателя.
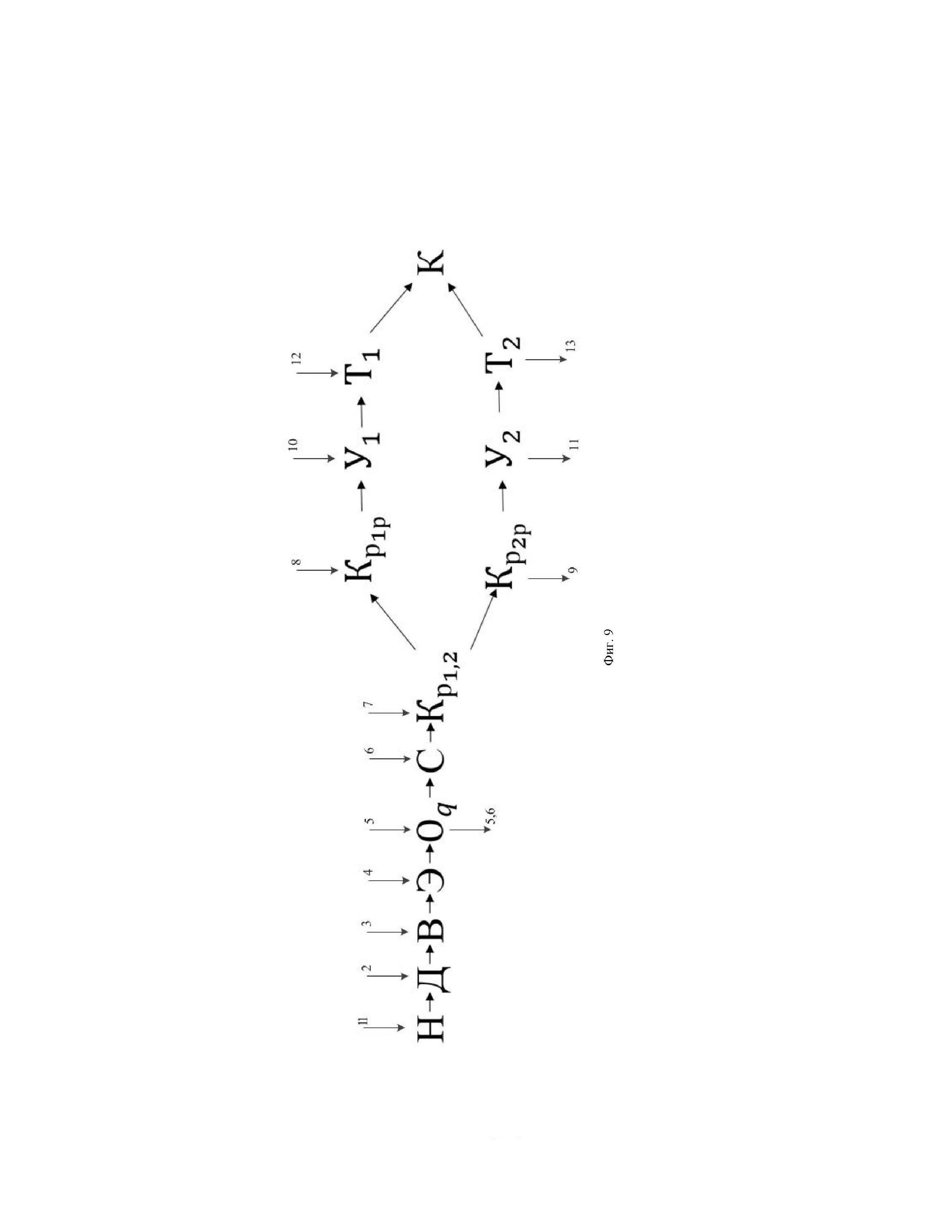
На фиг. 9 приведена схема выполнения последовательности операций предлагаемым комплексом.
На фиг. 10 дан внешний вид мобильного наземного робота высокой проходимости с компьютеризированным центральным пультом управления.
Структурная схема комплекса (фиг. 1) включает следующие приборы и блоки:
1 - мобильный наземный робот высокой проходимости (МНРВП);
2 - блок поиска БПЛА-нарушителя;
3 - тепловизор;
4 - интеллектуальный распознаватель (ИР);
5 - 3D цветная видеокамера (3DЦВ);
6 - направленный микрофон с встроенной видеокамерой изменяемого увеличения и перестраиваемым лазером (НМВВИУПР);
7 - камера ночного видения (КНВ);
8 - блок позиционирования по горизонту (БПГ);
9 - блок позиционирования по наклону (БПН);
10 - интеллектуальный навигационный блок (ИНБ);
11 - блок управления радиоэлектронной борьбой (БУРБ);
12 - блок подавления сигналов управления (БПСУ);
13 - блок подавления сигналов навигации (БПСН);
14 - блок подавления сигналов телеметрии (БПСТ);
15 - блок подавления видеосигнала (БПВ);
16 - блок экстренной ликвидации БПЛА-нарушителя (БЭЛ);
17 - БПЛА-охотник;
18 - БПЛА-нарушитель;
19 - мехатронная сетка захвата БПЛА-нарушителя (МСЗ) с обручем;
20 - измеритель направления и скорости ветра (ИНСВ);
21 - универсальный пульт управления (УПУ);
22 - компьютеризированный центральный пульт управления (КЦПУ);
23 - космический спутник (КС);
24 - блок памяти (БП);
25 - универсальный блок питания (УБП);
26 - блок мониторинга территории (БМТ).
Комплекс работает следующим образом.
Блок поиска БПЛА-нарушителя связан отдельными двунаправленными линиями связи с тепловизором, интеллектуальным распознавателем, 3D цветной видеокамерой, направленным микрофоном с встроенной видеокамерой изменяемого увеличения, камерой ночного видения, блоком позиционирования по горизонту, блоком позиционирования по наклону и космическим спутником и обнаруживает нарушителя. Блок управления радиоэлектронной борьбы подключен отдельными связями к блоку подавления сигналов управления, блоку подавления сигналов навигации, блоку подавления сигналов телеметрии, блоку подавления видеосигнала и блоку экстренной ликвидации БПЛА-нарушителя, благодаря чему может нарушать траекторию движения нарушителя, а при сближении с ним подавать сигнал на блок мехатронных сеток с целью захвата БПЛА-нарушителя.
Комплекс функционирует в четырех режимах:
Режим 1 - подготовка к работе (формирование эталонной информации и эталонного изображения ЭИ, выполнение тестовых операций);
Режим 2 - дежурство, а в случае появления БПЛА-нарушителя формирование программы работы;
Режим 3 - нейтрализация (уничтожение или захват) БПЛА-нарушителей;
Режим 4 - транспортировка БПЛА-нарушителя в заданную зону.
В первом режиме функционирования предлагаемого комплекса по периметру охраняемой зоны разворачиваются до 10 комплектов устройств (до 10 роботов МНРВП, несущих по 5 БПЛА-охотников; всего до 50 БПЛА-охотник). Затем в тестовом режиме проверяется работа приборов и блоков комплекса. От космического спутника 23, 3D цветной видеокамеры 5, измерителя направления и скорости ветра (ИНСВ) 20 и интеллектуального навигационного блока (ИНБ) 10 воспринимается и записывается в блок памяти (БП) 24 эталонная информация (пространственное состояние охраняемой территории), эталонное изображение (ЭИ) местности, текущие координаты устройств (МНРВП) 1, погодные условия (время суток, скорость и направление ветра, температура воздуха).
Во втором режиме функционируют МНРВП 1, КС 23, ИНБ 10, тепловизор 3, ИР 4, 3DЦВ 5, блок поиска (БП) БПЛА-нарушителя 2, НМВВИУОЛ 6, КНВ 7, БПГ 8, БПН 9, БП 24, ИНСВ 20, УПУ 21 и КЦПУ 22. Направленный микрофон, снабженный встроенной видеокамерой изменяемого увеличения и перестраиваемым лазером (НМВВИУОЛ) 6 имеет усилитель и микроконтроллер для выделения гармонических сигналов в заданном частотном диапазоне, что позволяет обнаружить БПЛА-нарушитель в любое время суток на расстоянии до 500 метров. Одновременно с НМВВИУОЛ 6 функционирует космический спутник 23, воспринимающий (считывающий) информацию об охраняемой территории. Тепловую информацию о БПЛА-нарушителей получает тепловизор 3, который фиксирует точечный элемент БПЛА-нарушителей с повышенной температурой (регуляторы и двигатели БПЛА-нарушителя в процессе работы нагреваются). Кроме того, камера ночного видения (КНВ) 7 имеет систему автоматического слежения и ведет визуальное наблюдение за БПЛА-нарушителем в ночное время. Объемная и цветная информация воспринимается 3DИВ 5. Кроме того, перестраиваемый лазер высвечивает бесшумные, но объемные БПЛА (планеры, воздушные шары). В случае обнаружения БПЛА-нарушителя перечисленными приборами (тепловизором 3, КС 23, ИР 4, 3DИВ 5, НМВВИУПЛ 6, КНВ 7) заявленный комплекс распределенного управления переходит в третий режим функционирования (при этом БПГ 8 отслеживает горизонтальное положение БПЛА-нарушителя, а БПН 9 отслеживает его положение в вертикальной плоскости), т.е. происходит позиционирование платформы с приборами 3, 5, 6, 7 в горизонтальной плоскости на угол +/- 90 градусов с углом наклона по горизонту до 45 градусов. Таким образом, в этом режиме путем комплексной системы слежения возможно обнаружение любого БПЛА (мультикоптера, вертолета, планера, шара).
В третьем режиме (нейтрализация БПЛА-нарушителя) при получении информации с любого датчика происходит переключение скорости позиционирования блока поиска на малую скорость, включается горизонтальное позиционирование (БПГ 8), определяется максимальная амплитуда выходного сигнала (БПГ 8) и определяется направление и высота полета БПЛА-нарушителя (временные затраты на данные операции - не более 2 секунд). Данные передаются по цифровому каналу связи на компьютеризированный центральный пульт управления 22 для принятия решения о нейтрализации БПЛА-нарушителя. Все полученные данные записываются в блок памяти 12 и на электронный диск КЦПУ 22 для последующего разбора правильности выполнения команд другими блоками комплекса и правильности действий оператора.
Последний этап третьего режима функционирования комплекса: включаются БУРБ 11, БПСУ 12, БПСН 13, БПСТ 14, БПВ 15 и БЭЛ 16. БУРБ 11 управляет нейтрализацией БПЛА-нарушителя радиоэлектронными методами. БПСУ 12 подавляет управляющие сигналы БПЛА-нарушителя при ручном управлении или при передаче сигналов телеметрии. БПСН 13 искажает показания всех навигационных систем и делает невозможным полет БПЛА-нарушителя по заданной программе. БПВ 15 подавляет видеосигналы от всех бортовых видеокамер (тепловизор, камера ночного видения, 3D цветная видеокамера и др.) БПЛА-нарушителя. Подавление сигналов и искажение информации происходит при работе БУРБ 11, он управляет БПСУ 12, БПСН 13, БПСТ 14 и БПВ 15 для подавления всех возможных сигналов БПЛА-нарушителя, генерирующих до 12 радиочастот, например, частота 2,3-2,5 ГГц (при ручном управлении БПЛА-нарушителем), частота 433 МГц (при использовании модема телеметрии), частота 1,6-1,8 ГГц (управлении от космического спутника), частота 5, 8 ГГц (работа видеокамер БПЛА-нарушителя). В результате БПЛА-нарушители либо «зависают» на большой высоте (мультикоптеры), либо падают на земную поверхность (мультикоптеры, дроны с крыльями).
В четвертом режиме работы предлагаемого комплекса происходит захват и транспортировка БПЛА-нарушителей в заданное место на МНРВП 1 (или другое заданное место). При обнаружении роботом МНРВП БПЛА-нарушителя координаты нарушителей вводятся в процессор БПЛА-охотников 17, они стартуют с МНРВП 1 и летят в сторону БПЛА-нарушителей. Стартующие БПЛА-охотники 17 разделяются на две группы: первая группа перемещается к БПЛА-нарушителям, которые находятся в пространстве, а вторая группа БПЛА-охотников перемещается к БПЛА-нарушителям, упавшим на земную поверхность. После электронного захвата и идентификации БПЛА-охотником 17 БПЛА-нарушителя бортовой вычислительный комплекс БПЛА-охотника передает сигнал об этом на МНРВП 1 и на КЦПУ 22, которые включают (в случае необходимости) повторные операции блокирования (подавления) сигналов управления БПЛА-нарушителей.
Далее происходит сближение БПЛА-охотников 17 и БПЛА-нарушителей по сигналам бортовой телеметрии БПЛА-охотников 17, не используя внешнее управление и навигацию. При подлете к БПЛА-нарушителям у БПЛА-охотников 17 распускаются мехатронные сетки захвата (МСЗ) 19, которые окутывают БПЛА-нарушителей [1-3]. После захвата БПЛА-нарушителей КЦПУ 22 (или непосредственно робот МНРВП 1) выключает аппаратуру радиоэлектронной борьбы (блоки 11-16), и БПЛА-охотник 17 продолжает управляемый полет на базу с захваченным БПЛА-нарушителем.
Универсальный блок питания (УБП) 25, осуществляющий электропитание предлагаемого комплекса (кроме БПЛА-охотников 17, имеющих автономное питание), состоит из аккумулятора, блока подзарядки на основе солнечной батареи и ветряного миниэнергоблока.
На самом БПЛА-охотнике 17 блок МСЗ 19 целесообразно закрепить по периметру круга, образующего посадочную платформу шасси. Сама сетка имеет форму цилиндра с сужением на конце и с закрепленным грузом. Ввиду симметричности данная сетка наиболее стабильна в полете. На начальном этапе полета сетка с обручем размещается в специальном контейнере на шасси, сетка выбрасывается при подлете к нарушителю по команде оператора или полетного контроллера. Если вес нарушителя превышает грузоподъемность дрона, шасси имеет механизм расстыковки, который отсоединяет средство захвата, и нарушитель вместе с сеткой и обручем падает на землю. Сетка может быть в виде крупной ячеистой сети типа рыболовной, или в виде металлической сетки, и может быть оборудована парашютом. Блок МСЗ может содержать несколько сеток 19.
На фиг. 2 приведена структурная схема БПЛА-охотника 17, которая состоит из:
27 - ЦБУ с контроллером;
28 - модуль питания;
29 - пропеллер (с электродвигателем);
30 - блок визуальных датчиков и датчиков расстояния (БВДДР);
31 - модуль навигации (с высотомером, определитель координат GPS/ГЛОНАССА);
32 - радиопередатчик;
33 - инерциальная система навигации (ИСН).
Информация на БПЛА-охотник 17 поступает МНРВП 1 через радиопередатчик 32, обеспечивающий шифрование, а также прием и передачу информации. Управляет работой БПЛА-охотника 17 центральный блок управления (ЦБУ) 27, содержащий контроллер управления, блок памяти, блок телеметрии и интерфейс. ИСН 33 (гироскоп) обеспечивает стабилизацию БПЛА-охотника 17 в пространстве, а модуль навигации осуществляет местоопределение БПЛА-охотника 17 в пространстве. Модуль навигации 31 состоит и автопилота и определителя координат GPS/ГЛОНАСС. Окружающая обстановка вокруг БПЛА-охотника 17 воспринимается (считывается) блоком визуальных датчиков и датчиков расстояния (БВДДР) 30, включающий 3D цветную видеокамеру, миникамеру ночного видения, тепловизор и лазерный датчик расстояния. ЦБУ 27 через драйвер двигателя управляет скоростью вращения пропеллеров 29. Этим обеспечивается управление скоростью движения и подъемной силой БПЛА-охотника 17. При этом все приводы (двигатели) с пропеллерами 29 могут изменять свое положение относительно вертикальной оси. Это обеспечивает высокую маневренность БПЛА-охотника, например, в случае ветреной погоды. Таким образом, ЦБУ 27 обеспечивает следующие автономные операции БПЛА-охотника 17: управление электродвигателями, стабилизацию и координацию в пространстве, навигацию, управление электропитанием и полетом, принятие решения, защиту от столкновения, а также работу в режиме ручного управления. Причем Экономичный модуль питания 28 снабжен подзаряжаемым аккумулятором. В процессе работы БПЛА-охотник 17 выполняет следующие операции:
1) выделение и распознавания цели с БПЛА-нарушителя по визуальному каналу;
2) сопровождение цели по визуальному каналу;
3) подавление сигналов управления у БПЛА-нарушителя в радиочастотном диапазоне (в случае необходимости);
4) предсказательное моделирование траектории движения БПЛА-нарушителя;
5) прокладывание собственного оптимального маршрута движения в точку перехвата БПЛА-нарушителя;
6) разрушение или физический захват БПЛА-нарушителя;
7) перемещение захваченного БПЛА-нарушителя в точку привязки (на базу);
8) взаимодействие с компьютеризированным центральным пультом управления 22.
Функции выделения и распознавания цели по визуальному каналу осуществляются бортовыми системами БПЛА при вхождении «нарушителя» в зону видимости БПЛА-охотника 17. Данная функция обеспечивается с применением разработанных специальных алгоритмов обработки изображений и малогабаритных вычислителей с параллельной архитектурой. После установления визуального контроля «нарушитель» электронно фиксируется и сопровождается с отслеживанием координат.
На фиг. 3 представлена структурная схема компьютеризованного центрального пульта управления, которая состоит из следующих приборов:
34 - компьютеризованное рабочее место пилота (КРМП);
35 - компьютеризованное рабочее место инженера (КРМИ);
36 - блок шифрования;
37 - приемо-передатчик;
38 - антенный блок с автотреком (АБА);
39 - цифровой блок телеметрии (ЦБТ);
40 - универсальный стационарный блок питания (УСБП).
Комплексом управляет оператор с помощью компьютеризованного рабочего места пилота (КРМП) 34, на дисплее которого отображается вся навигационная информация от всех МНРВП 1 и БПЛА-охотников 17 и все пространственное состояние территории (зоны контроля). Техническое состояние всех МНРВП 1 и БПЛА-охотников 17, а также техническое состояние БПЛА-нарушителей отображается на дисплее компьютеризированного рабочего места инженера (КРМИ) 35, который может корректировать работу МНРВП 1 и БПЛА-охотников 17. Обработанная информация отображается на дисплеях КРМП 34 и КРМИ 35 с помощью цифрового блока телеметрии (ЦБТ) 39. Для надежной связи используется антенный блок, с автотрекером (АБА) 39, реализующий узконаправленный электромагнитный пучок. Для исключения перехвата информации она шифруется блоком шифрования 36 и передается приемопередатчиком 37 на МНРВП 1 и универсальный пульт управления (УПУ) 21.
На фиг. 4 дана схема расположения комплекта БПЛА-охотников и БПЛА-нарушителей на единичном мобильном наземном роботе высокой проходимости (МНРВП).
Здесь на фиг. 4А показана схема расположения БПЛА-охотников 17 на поверхности 42 МНРВП 1. Зона «С-Ф» - зона старта-финиша, и зона «СКЛАД» (зона складирования), куда транспортируют после обезвреживания БПЛА-нарушителей. Таким образом, БПЛА-охотники 17 стартуют из зоны «С-Ф» и транспортируют нарушителей в зону «СКЛАД» МНРВП 1.
Количество БПЛА-охотников в заявленном комплексе распределенного управления интеллектуальными роботами может быть различным. На фиг. 4 А, Б показано возможное количество БПЛА-охотников на каждом МНРВП 1 в количестве пяти БПЛА.
На фиг. 5 представлена структурная схема блока мониторинга территорий (БМТ), которая может состоять из следующих элементов:
43 - интерфейс, отображающий информацию распознавателя 4;
44 - процессор управления (ПУ);
45 - анализатор химических и радиационных веществ (АХРВ);
46 - искатель взрывчатых веществ (ИВВ);
47 - блок электронной разметки территории (БЭРТ);
48 - блок установки индикаторов для разметки территории (БУИРТ).
Блок мониторинга территории БМТ 26 функционирует следующим образом. От интеллектуального распознавателя 4 поступает на интерфейс 43 информация о состоянии территории, местоположения конкретного (i-го) МНРВП 1 и командный сигнал на начало работы БМТ 26. После этого процессор управления (ПУ) 44 включает в работу АХРВ 45 и ИВВ 46, которые осуществляют анализ окружающей среды и территории о химическом или радиационном заражении, а также обеспечивают поиск взрывчатых веществ. АХРВ 45 и ИВВ 46 раскрыты в [11-14]. Информация о состоянии территории отображается на экране БЭРТ 47, а опасные места размечаются БУИРТ 48 [15].
На фиг. 6 дана структурная схема интеллектуального навигационного блока (ИНБ) 10 (см. фиг. 1), который состоит из следующих приборов:
49 - блок интерфейсов;
50 - преобразователь сигналов (ПС);
51 - интеллектуальный контроллер управления;
52 - оперативное запоминающее устройство (ОЗУ);
53 - блок навигационных датчиков (БНД).
Интеллектуальный навигационный блок (ИНБ) 10 функционирует следующим образом. Блок интерфейсов (БИ) 49 взаимодействует с роботом 1, космическим спутником (КС) 23 и блоком памяти (БП) 24; На ИНБ 10 через блок интерфейсов 49 поступает информация о текущих координатах от блока навигационных датчиков (БНД) 53, в который входят GPS/ГЛОНАСС, инерциальная навигационная система ИНС, блок поиска БПЛА-нарушителя 2, блок управления радиоэлектронной борьбы 11, а также информация от космического спутника 23 о состоянии территории (расположение объектов на территории, на которой находится комплект роботов МНРВП 1, а также информация о местоположении и состоянии конкретных i-тых МНРВП). После этого преобразователь сигналов 50 преобразует (масштабирует, кодирует) сигналы и передает их на БНД 53 и в ОЗУ 52, информация от которых обрабатывается и используется интеллектуальным контроллером управления 51, формирующим стратегию работы и программу функционирования МНРВП 1.
На фиг. 7 представлена структурная схема интеллектуального мобильного наземного робота высокой проходимости МНРВП 1, который состоит из следующих элементов:
54 - корпус;
55 - несущая рама с блоком питания;
56 - левое гусеничное шасси (ЛГШ);
57 - правое гусеничное шасси (ПГШ);
58 - левый двигатель с редуктором (ЛДР);
59 - правый двигатель с редуктором (ПДР);
60 - блок управления двигателем (БУД);
61 - отсек для монтажа сменных модулей с быстросъемной фиксацией (ОМСМБФ);
62 - передние фары;
63 - задние фары;
64 - цифровой блок получения и передачи телеметрической информации (ЦБППТИ).
Интеллектуальный мобильный наземный робот высокой проходимости МНРВП сконструирован и функционирует следующим образом.
На раме 55 закреплены ЛГШ 56 и ПГШ 57. МНРВП движется с помощью ЛДР 58 и ПДР 59, управляемый БУД 60 и питаемый блоком 25. Повороты МНРВП также осуществляются с помощью БУД 60 (например, если включается ПДР 59, то производится поворот налево, а при включении ЛДР 58 осуществляется поворот направо). В отсеке ОМСМБФ 61 располагаются следующие блоки устройства: 2-16, 20, 26. Передние фары 62 и задние фары 63 установлены на корпусе 54, которые крепятся к раме 55. Фары 62, 63 функционируют в оптическом диапазоне (видимом и инфракрасном) [4, 11, 12]. В зонах «Старт» и «Склад» располагаются БПЛА-охотники и БПЛА-нарушители (фиг. 4). Связь с компьютеризованными рабочими местами 34, 35 и другими МНРВП 1 обеспечивает ЦБППТИ 64, а также приборы, входящие в ОМСМБФ 61 (фиг. 7).
На фиг. 8 представлена структурная схема интеллектуального распознавателя.
65 - гибридная вычислительная платформа;
66 - лидар;
67 - тепловизор;
68 - система сбора и анализа данных;
69 - стереокамера.
Интеллектуальный распознаватель выполнен в виде динамически структурно-перестраиваемой нейронной сети и интерфейса. Здесь гибридная вычислительная платформа 65 и система сбора и анализа данных 68 собирают визуальную информацию с датчиков (лидар 66, тепловизор 67, стереокамера 69) и обрабатывают ее с целью распознавания образов и понимания окружающей среды, а также обмениваются информацией с внешней средой. Система сбора и анализа данных 68 выполняет специализированные алгоритмы обработки и анализа изображений, используя как центральный процессор, так и программируемую логическую интегральную схему.
На фиг. 9 дана операторная схема управления функционированием предлагаемого комплекса. Перечислим смысл введенных операторов.
1. Оператор Н означает начало работы комплекса, приборы и блоки в целом подготавливаются к работе (возврат в исходное состояние, очистка памяти и т.п.) и вырабатывается команда для блоков 10 и 22, определяющих последовательность операций.
2. Оператор Д означает размещение комплекта МНРВП 1 с БПЛА-охотниками 17 для дежурства охраняемой территории.
3. Оператор В включает через КЦПУ 22 все блоки предлагаемого комплекса для обнаружения БПЛА-нарушителей.
4. Оператор Э вводит в блок памяти 24 эталонную информацию о местоположении комплекта (включая эталонные изображения - ЭИ), а также другую эталонную информацию об окружающей среде.
5. Оператор Oq управляет обнаружением БПЛА-нарушителей и фиксирует координаты БПЛА-нарушителей. Здесь необходимо выполнения условия q: нарушители относятся к классу БПЛА (скорость движения и размер летательных объектов не превышает допустимые параметры), тогда выполнение операции передается к следующему оператору С, в противном случае сигнал на С не передается.
6. Оператор С обеспечивается электронный захват и сопровождение БПЛА-нарушителей (используются координаты, габаритные характеристики, направление движения и скорость БПЛА-нарушителей).
7. Оператор К классифицирует БПЛА-нарушителей по координатам и скорости движения и определяет очередность старта БПЛА-охотников 17. Здесь необходимо выполнение условия Р: единственный нарушитель (БПЛА-нарушитель) или несколько нарушителей (БПЛА-нарушителей). Если нарушитель единственный, то определяется стартующий БПЛА-охотник 17 (Оператор К1р), если нарушителей несколько, то определяются стартующие БПЛА-охотники (Оператор К2р).
8. Оператор У1, У2 включают операции электронной ликвидации (устранения) БПЛА-нарушителей средствами блока управления радиоэлектронной борьбой (БУРБ) 11. При этом одновременно на заданное время отключаются все электронные системы БПЛА-охотника 17.
9. Операторы З1, З2 означают старт БПЛА-охотников 17 и захват БПЛА-нарушителей (одного или нескольких).
10. Операторы Т1, Т2 означают транспортировку БПЛА-нарушителей и складирование их в зону складирования на роботах МНРВП 1.
11. Оператор К означает окончание работы предлагаемого комплекса. Происходит электронная фиксация результата и размещение БПЛА-охотников в зоне старта МНРВП.
Пилотный образец заявленного комплекса с соответствующим программным обеспечением создан и успешно испытан на полигоне заявителя. Предлагаемый комплекс имеет значительно лучшие технические характеристики по сравнению с ближайшим аналогом. Эти характеристики заключаются в следующем.
1. Повышается точность определения координат местоположения предлагаемых устройств (комплекта транспортных мобильных наземных роботов и БПЛА-охотников в навигационном режиме) и типа и положения БПЛА-нарушителей за счет введения интеллектуального распознавателя, интеллектуальной комплексной системы поиска БПЛА-нарушителя содержащей тепловизор, 3D цветную телекамеру, камеру ночного видения, направленный микрофон с встроенной видеокамерой изменяемого увеличения и лазером, систему позиционирования по горизонту, систему позиционирования по наклону, а также определителя координат GPS/ГЛОНАСС, гироскопа, акселерометра, измерителя направления и скорости ветра, автопилота. Высокая точность определения местоположения достигается более высокой точностью оценки координат мобильного наземного робота и БПЛА-охотника, а также использованием дополнительной информации при сравнении текущего и эталонного изображений.
2. Повышается эффективность подавления БПЛА-нарушителя за счет комплексной системы радиоэлектронной борьбы путем введения системы подавления сигналов навигации, системы подавления сигналов телеметрии и системы подавления видеосигнала БПЛА-нарушителя.
3. Обеспечивается автоматический и автоматизированный режимы управления предлагаемыми устройствами (мобильным наземным роботом высокой проходимости и БПЛА-охотником). Автоматизированный режим осуществляется оператором с помощью универсального пульта управления и компьютеризованного рабочего места управления, а автоматический режим выполняется по автоматической программе, записанной в памяти микроконтроллеров управления мобильного наземного робота и БПЛА, и при ее адаптации (подстройке программы и задании параметров) с учетом информации от интеллектуального распознавателя, автопилота, а также всей текущей информации, поступающей в микроконтроллеры управления.
4. Расширяются функциональные возможности, повышается оперативность, маневренность и управляемость (приспосабливаемость) предлагаемого комплекса, обеспечивающего:
во-первых, возможность контроля охраняемой территории от всех типов малогабаритных БПЛА-нарушителей за счет эффективной комплексной системы радиоэлектронной борьбы;
во-вторых, быстрое развертывание (до 10 комплексов, несущих до 50 БПЛА-охотников) в пределах охраняемой территории и возможность управления элементами комплекса, находящимися на удалении до 1500 метров, в автоматизированном режиме;
в-третьих, одновременное подавление (обезвреживание) комплекта до 50 штук БПЛА-нарушителей, физический захват БПЛА-нарушителей, перемещение БПЛА-нарушителей в заданную зону на транспортный (наземный) робот;
в-четвертых, приспосабливаемость к изменяющейся ветровой обстановке (скорости и направления ветра) за счет возможности изменения направления и скорости вращения пропеллеров электроприводов БПЛА-охотника и устойчивого положения мобильного наземного робота на гусеничном ходу.
5. Повышение быстродействия выполнения заданных операций за счет реализации параллельных вычислений, анализа и обработки многомерной информации, выполнения автоматического и автоматизированного режимов работы и использования изображений охраняемой зоны со спутников.
6. Увеличение длительности автономного режима работы предлагаемого комплекса за счет использования универсального мобильного блока питания и универсального стационарного блока питания, которые состоят из аккумуляторов и подзарядных блоков на основе солнечных батарей и ветроустановок.
7. Улучшения удобства обслуживания предлагаемого комплекса за счет дополнительно введенного компьютеризованного стационарного рабочего места инженера, что обеспечивает контроль состояния внешней среды, состояния элементов предлагаемого комплекса и управления ими.
Источники:
1. Способ пассивного обнаружения и определения координат малогабаритных беспилотных летательных аппаратов. Патент РФ №2574224 С1, МПК G01S 17/06 (2006/01).
2. Радиолокационный способ обнаружения малозаметных беспилотных летательных аппаратов. Патент РФ №2534217 С1, МПК G01S 13/04 (2006.01) публ. 27.11.2014, Бюл №33.
3. Система управления комплексными методами борьбы с малогабаритными беспилотными летательными аппаратами. Патент РФ №2578524 С2, МПК F41H11/02 (2006.01), Публ. 27.03.2016, Бюл. №9.
4. Сырямкин В.И. Информационные устройства и системы в робототехнике и мехатронике: учебное пособие. (Серия: Интеллектуальные технические системы). - Томск: Изд-во Том. ун-та, 2016. - 524 с. (см. стр. 139-236, 424-432, 468-487).
5. Абрамова Т.В., Ваганова Е.В., Горбачев С.В., Сырямкин В.И., Сырямкин М.В. Нейро-нечеткие методы в интеллектуальных системах обработки и анализа многомерной информации. - Томск: Изд-во Том. унта. 2014. - 442 с. (см. стр. 9-71, 338-434).
6. Горбачев С.В., Емельянов С.Г., Жданов Д.С, Мирошниченко С.Ю., Сырямкин В.И., Титов Д.В. Цифровая обработка аэрокосмических изображений. - Томск: Изд-во Том. ун-та, 2016. - 304 с. (см. стр. 24-64, 96-211, 250-276).
7. Сырямкин В.И., Соломонов Ю.С, Соломонов Л.С.и др. Способ управления движущимся объектом и устройство для его осуществления. Патент на изобретение РФ, №2476825 от 10.03.2011. Публ. 27.02.2013. Бюл. №6.
8. Сырямкин В.И., Шидловский B.C. Корреляционно-экстремальные радионавигационные системы. Томск: Изд-во Том. ун-та, 2010. - 316 с. (см. стр. 73-183).
9. Шумилов В.Н. Принципы функционирования мозга. - Томск: Изд-во Том. ун-та, 2015. - 8 с.
10. Ориентация и навигация подвижных объектов: современные информационные технологии / Под ред. B.C. Алешина и др. - М.: ФИЗМАТЛИТ, 2006. - 424 с.
11. Бубенчиков М.А. и др. Современные методы исследования материалов и нанотехнологий / Под ред. д.т.н., профессора В.И. Сырямкина. - Томск: Изд-во Том. ун-та. 2010. - 366 с.
12. Богомолов Е.Н. и др. Метрология и сертификация диагностического оборудования и материалов. - Томск: Издательский Дом Томского государственного университета, 2015. - 164 с.
13. Измерители и анализаторы. [Электронный ресурс] / URL: http://www.rhbz.rti/appendices/measuring-instmments-analyzers.html.
14. 13. Все о металлоискателях и металлодетекторах. Принципы работы. Электронный ресурс URL: http://izmer-ls.ru/met/sche1-1.html.
15. Патент РФ №2661295. Устройство для определения разметки участков территории с химическим и радиоактивным заражением. Бюл. №20 от 13.07.2018 (приор. 04.07.2017).
Способ получения катализатора на основе ceo-snо на стеклотканном носителе
Катализатор переработки этанола и способ получения ацетальдегида и водорода из этанола с использованием этого катализатора
Способ подготовки культур сульфидогенных бактерий для выделения днк
Способ очистки донных отложений и воды от нефти и нефтепродуктов под ледовым покровом в водоемах
Способ получения сложного алюмината кальция-магния
Способ предпосевной обработки семян зерновых культур
Способ определения селена(iv)
Способ зеленого черенкования плодовых и ягодных культур
Способ увеличения семенной и сырьевой продуктивности посконника коноплевидного в условиях ex situ
Способ очистки донных отложений водоемов от нефти и нефтепродуктов и устройство для его осуществления
Способ управления движущимся объектом и устройство для его осуществления
Манипулятор рентгеновского микротомографа
Способ рентгеновской томографии и устройство для его осуществления
Способ контроля сердечно-легочной реанимации и устройство для его осуществления
Устройство анализа бронхофонограмм
Устройство для определения и разметки участков территории с химическим и радиоактивным заражением
Способ диагностики состояния органов человека или животного и устройство для его осуществления
Трубопроводный диагностический робот
Робот для диагностики и ремонта трубопроводного транспорта
Многофункциональный медиакомплекс для транспорта с сетевым управлением и видеоаналитикой

