Результат интеллектуальной деятельности: УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И РАЗМЕТКИ УЧАСТКОВ ТЕРРИТОРИИ С ХИМИЧЕСКИМ И РАДИОАКТИВНЫМ ЗАРАЖЕНИЕМ
Вид РИД
Изобретение
Изобретение относится к устройствам мониторинга территории. Область применения охватывает устройства определения и разметки участков территории с химическим и радиоактивным заражением.
Известны и широко применяются различные устройства мониторинга территории, основанные на наземно-воздушных дистанционно-управляемых системах [1,2].
Существенным признаком этих устройств является то, что дистанционно управляется устройство, способное передвигаться по воздуху, объединяющее робот, квадрокоптер и колесо, способное передвигаться по поверхности.
Недостатки устройств заключаются в невозможности разворота устройства на месте в наземном положении (это существенно ограничивает применение робота в стесненных условиях здания и сооружения), в низком коэффициенте полезного действия из-за повышенной затраты энергии винтов приводов квадрокоптера (до 60%), необходимости включения всех четырех винтов для горизонтального перемещения, малая грузоподъемность, сильное раскачивание и низкие функциональные возможности. Кроме этого отсутствует режим автоматического управления.
В качестве прототипа выбрано устройство, в котором в универсальной аэродинамической платформе, выполненной одновременно в виде клетки и колеса, размещен гексокоптер. Устройство способно перемещаться по грунту и воздуху, разворачиваться на месте [2].
Недостатки устройства заключаются в низкой точности определения координат местонахождения объекта (универсального робота УР), отсутствии одновременно автоматического и автоматизированного режимов функционирования, низком быстродействии, малой маневренности и низких функциональных возможностях (невозможности перемещения по снегу, льду, воде, земле, воздуху, невозможности перемещения в ограниченном пространстве и в любое время суток, по заминированной территории и в ветреную погоду; невозможности определения и разметки участков территории с химическим и радиоактивным заражением), недостаточной оперативности выполнения заданных технологических операций, недостаточном удобстве обслуживания и обеспечения безопасности функционирования, малой продолжительности автономной работы и малой грузоподъемности.
Задачей изобретения является создание устройства для определения и разметки участков территории с химическим и радиоактивным заражением с улучшенными функциональными возможностями за счет повышения точности и быстродействия определения координат, оперативности и маневренности, реализации автоматического и автоматизированного режимов, обеспечения безопасности функционирования и удобства обслуживания, способности распознавать звуковую и визуальную информацию (изображения), определять и размечать участки территории с химическим и радиоактивным заражением.
Поставленная задача достигается тем, что заявленное устройство, содержащее, как и прототип, универсальную аэродинамическую решетку, платформу с пропеллерами и универсальный пульт управления, имеет возможность перемещаться по любой траектории по наземной поверхности и в воздушном пространстве.
Новые признаки устройства:
универсальная аэродинамическая решетка 1 содержит два обода со спицами, соединительную решетку и горизонтальную ось, на которой может быть закреплена платформа с оборудованием;
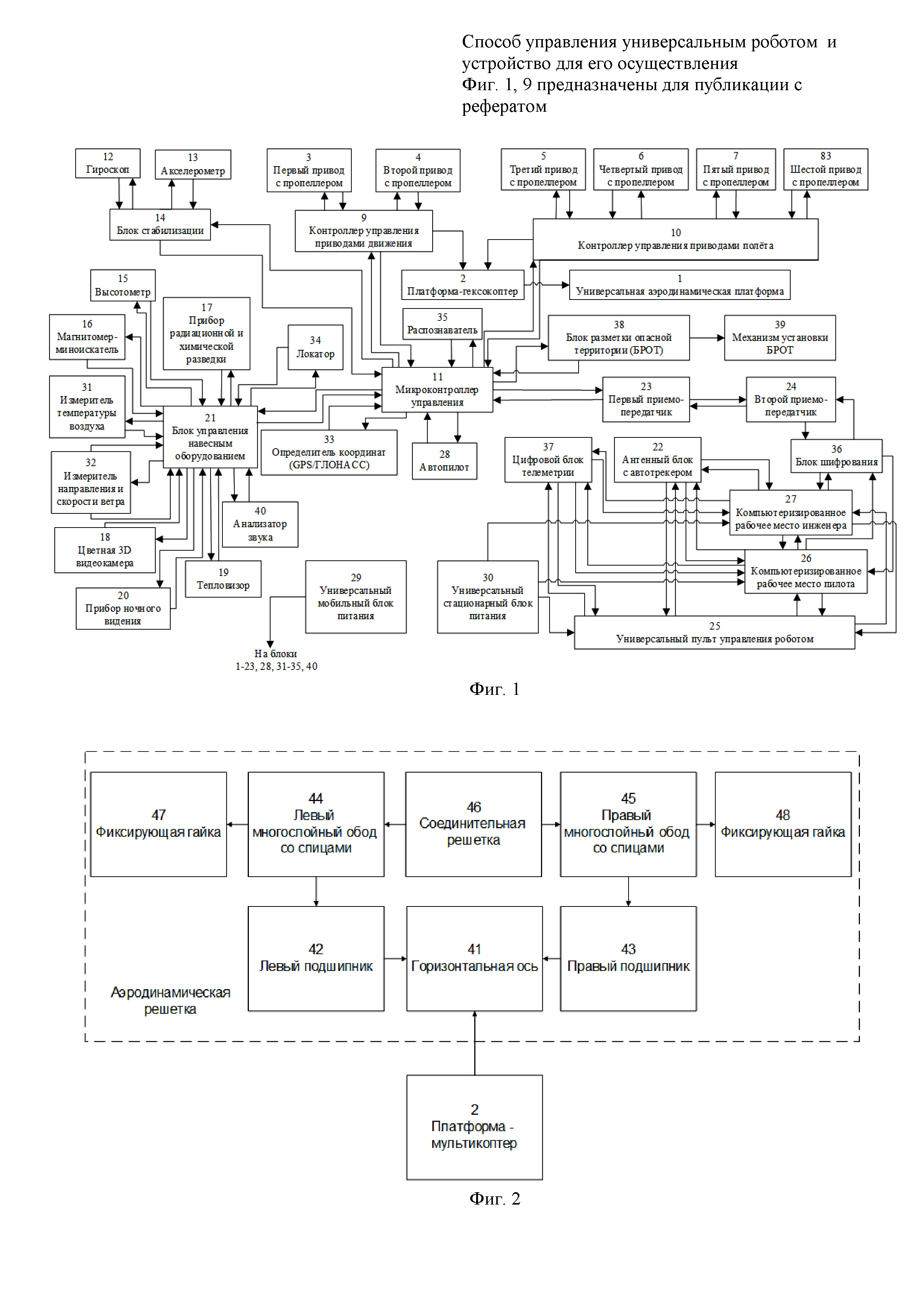
платформа-гексокоптер 2 содержит шесть приводов с пропеллером 3-8, навесное оборудование в составе: гироскоп 12; акселерометр 13; высотомер 15; магнитомер-миноискатель MM 16; прибор радиационной и химической разведки ПРХР 17; цветная 3D видеокамера 18; тепловизор 19; прибор ночного видения ПНВ 20; автопилот 28; измеритель температуры воздуха ИТВ 31; измеритель направления и скорости ветра ИНСВ 32; определитель координат GPS-ГЛОНАСС 33; локатор 34 и анализатор звука 40;
блоки обработки информации и управления в составе: микроконтроллер управления МУ 11; контроллер управления приводами движения КУПД 9; контроллер управления приводами полета КУПП 10; распознаватель окружающей среды РОС 35; блок стабилизации 14; блок управления навесным оборудованием БУНО 21; блок разметки опасной территории БРОТ 38; механизм установки на местности блоков разметки опасной территории МУБРОТ 39; первый приемопередатчик ППП 23 и универсальный мобильный блок питания УМБП 29;
универсальный пульт управления роботом УПУ 25 содержит блоки управления в составе: компьютеризированное рабочее место пилота КРМП 26; компьютеризированное рабочее место инженера КРМИ 27; антенный блок с автотрекером АБА 22; второй приемопередатчик ВПП 24; цифровой блок телеметрии ЦБТ 37; блок шифрования БШ 36 и универсальный стационарный блок питания УСБП 30;
при этом микроконтроллер управления МУ 11 подключен отдельными двунаправленными связями к контроллеру управления приводами движения КУПД 9, контроллеру управления приводами полета КУПП 10, определителю координат GPS/ГЛОНАСС 33, автопилоту 28, распознавателю окружающей среды РОС 35, блоку стабилизации 14, блоку управления навесным оборудованием БУНО 21, блоку разметки опасной территории БРОТ 37 и первому приемопередатчику ППП 23;
контроллер управления приводами движения КУПД 9, в свою очередь, подключен отдельными двунаправленными связями к первому приводу с пропеллером 3 и ко второму приводу с пропеллером 4,
контроллер управления приводами полета КУПП 10, в свою очередь, подключен отдельными двунаправленными связями к третьему приводу с пропеллером 5, четвертому приводу с пропеллером 6, пятому приводу с пропеллером 7 и шестому приводу с пропеллером 8,
блок стабилизации 14, в свою очередь, подключен отдельными двунаправленными связями к гироскопу 12 и акселерометру 13,
блок управления навесным оборудованием БУНО 21, в свою очередь, подключен отдельными двунаправленными связями к высотомеру 15, магнитомеру-миноискателю ММ 16, прибору радиационной и химической разведки ПРХР 17, цветной 3D видеокамере 18, тепловизору 19, прибору ночного видения 20, измерителю температуры воздуха ИТВ 31, измерителю направления и скорости ветра ИНСВ 32, локатору 34, анализатору звука 40, а навесное оборудование и блоки управления платформы-гексокоптера 2 подключены к универсальному мобильному блоку питания УМБП 29,
блок разметки опасной территории БРОТ 38, в свою очередь, подключен отдельными двунаправленными связями к механизму установки на местности блоков разметки опасной территории МУБРОТ 39;
при этом компьютеризированное рабочее местом пилота КРМП 26 и компьютеризированное рабочее место инженера КРМИ 27 отдельными двунаправленными связями соединены между собой, а также подключены к цифровому блоку телеметрии ЦБТ 37, блоку шифрования БШ 36, антенному блоку с автотрекером АБА 22 и к универсальному стационарному блоку питания УСБП 30, причем упомянутый первый приемопередатчик ППП 23 посредством последовательно соединенных второго приемопередатчика ВПП 24 и блока шифрования БШ 36 имеет возможность установить связь с рабочим местом пилота КРМП 26 и рабочим местом инженера КРМИ 27.
В частном случае универсальная аэродинамическая решетка содержит два обода со спицами и подшипниками, соединительную решетку и горизонтальную ось, на которой установлена платформа-гексокоптер с закрепленными на ней шестью приводами с пропеллером.
Кроме того, прибор ночного видения ПНВ выполнен в виде телевизионной камеры, содержащей инфракрасный прожектор и функционирующей в инфракрасном оптическом диапазоне.
Кроме того, тепловизор выполнен в виде телевизионной камеры, воспринимающей и отображающей тепловое изображение объекта контроля.
Кроме того, цветная 3D видеокамера имеет два приемника оптического диапазона и выполнена с возможностью восстановления трехмерного цветного изображения объекта контроля.
Кроме того, локатор состоит из сканирующего лучевого излучателя, приемника отраженного сигнала, отображателя полученной информации и интерфейса связи с потребителем информации.
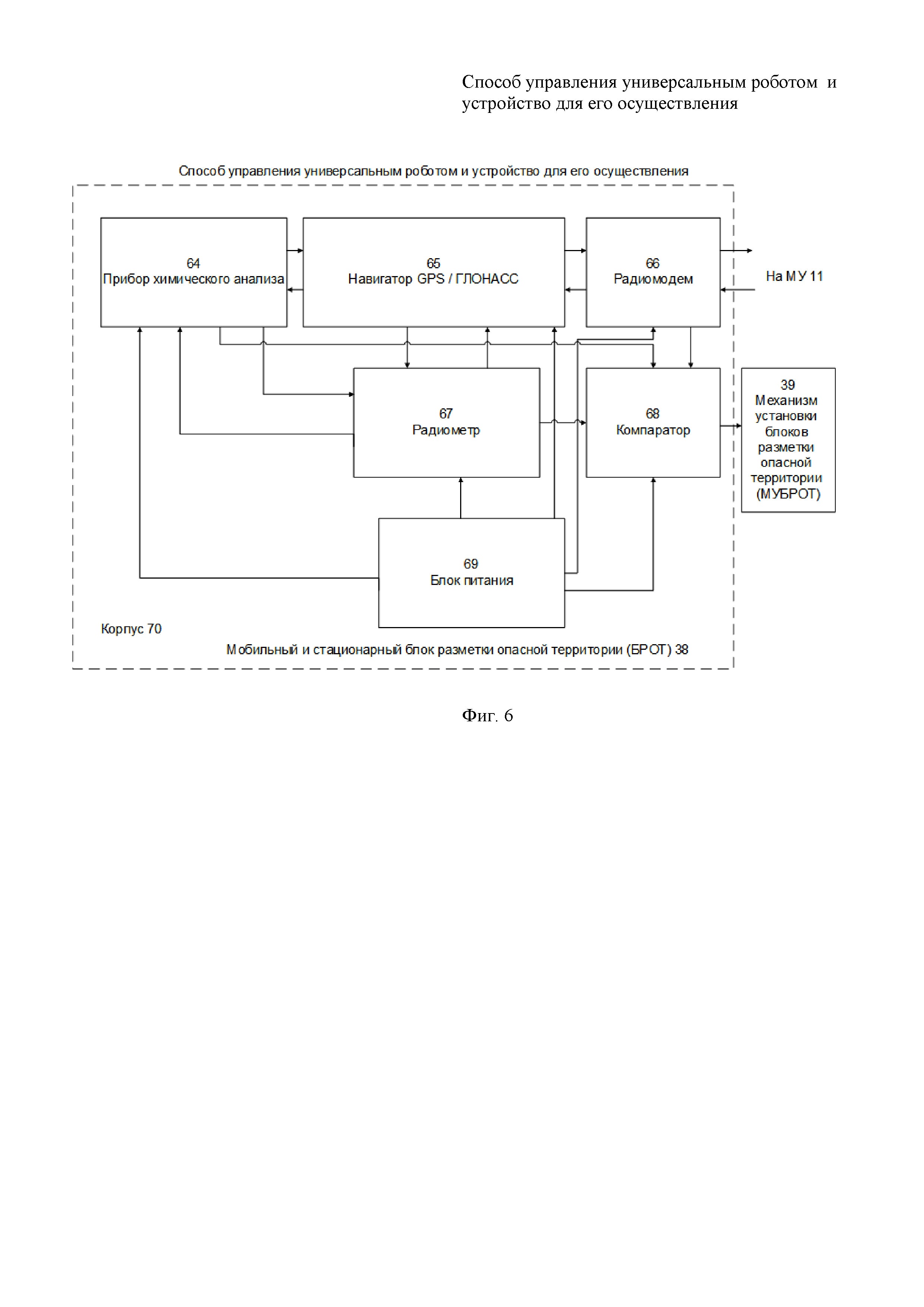
Кроме того, блок разметки опасной территории БРОТ включает в себя навигатор GPS/ГЛОНАСС, прибор химического анализа, радиометр, радиомодем, компаратор и блок питания.
Кроме того, механизм установки на местности блоков разметки опасной территории МУБРОТ включает корпус, содержащий устанавливаемые на местности блоки разметки, электромагнит, фиксатор и блок управления
Кроме того, блок управления навесным оборудованием БУНО содержит синхронизатор включения последовательности работы приборов и блок управления положением приборов съема информации и передачи ее потребителю.
Кроме того, приводы с пропеллером 3-8 выполнены в виде двигателя, редуктора, пропеллера механизма поворота пропеллера и устройства крепления привода к платформе-гексокоптеру.
Кроме того, контроллеры управления приводами движения и полета выполнены в виде процессора, блока памяти и интерфейса.
Кроме того, микроконтроллер управления выполнен в виде процессора, блока памяти и интерфейса.
Кроме того, первый и второй приемопередатчики выполнены в виде преобразователя, шифратора, дешифратора и усилителя.
Кроме того, универсальный пульт управления содержит процессор, блок памяти, интерфейс и блок ручного управления устройством с помощью клавиатуры и джойстика.
Кроме того, компьютеризированное рабочее место пилота выполнено в виде процессора, блока памяти, интерфейса, дисплея и блока ручного управления устройством с помощью клавиатуры и/или джойстика.
Кроме того, компьютеризированное рабочее место инженера выполнено в виде процессора, блока памяти, интерфейса, дисплея, клавиатуры и блока отображения информации об окружающей среде.
Кроме того, распознаватель выполнен в виде параллельно включенных блоков корреляционного анализа, Фурье-анализа, Вейвлет-анализа, фрактального анализа, анализа нейро-нечеткими методами, анализа морфологическими (структурными) методами и анализа структурно-перестраиваемыми методами, а также содержит блок управления подсистемами обработки изображений, интеллектуальный блок анализа результата и интерфейсы ввода и вывода.
Кроме того, универсальный стационарный блок питания УСБП выполнен в виде выпрямителя переменного электрического тока, стабилизатора, аккумулятора, блока подзарядки, комплексного блока солнечной батареи и ветряного мини энергоблока.
Кроме того, универсальный мобильный блок питания выполнен в виде блока подзарядки, аккумулятора, блока солнечной батареи и ветряного мини энергоблока.
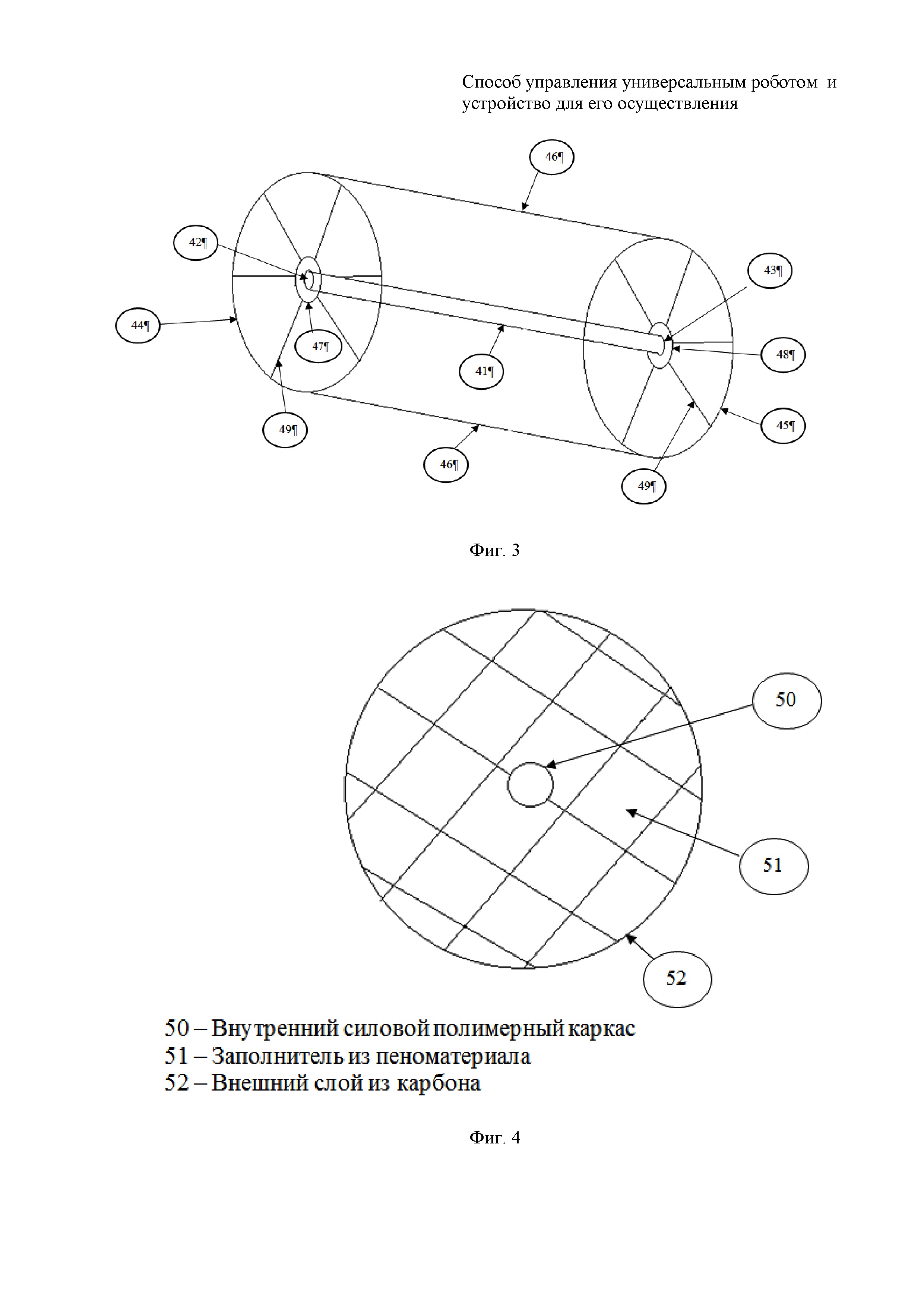
Упомянутый обод аэродинамической решетки может быть выполнен в виде непотопляемого многослойного обода высокой проходимости, содержащего внутренний силовой полимерный каркас, внешний слой из карбона и заполнитель из легкого пеноматериала.
Предлагаемое устройство иллюстрируется чертежами, представленными на фиг. 1-9.
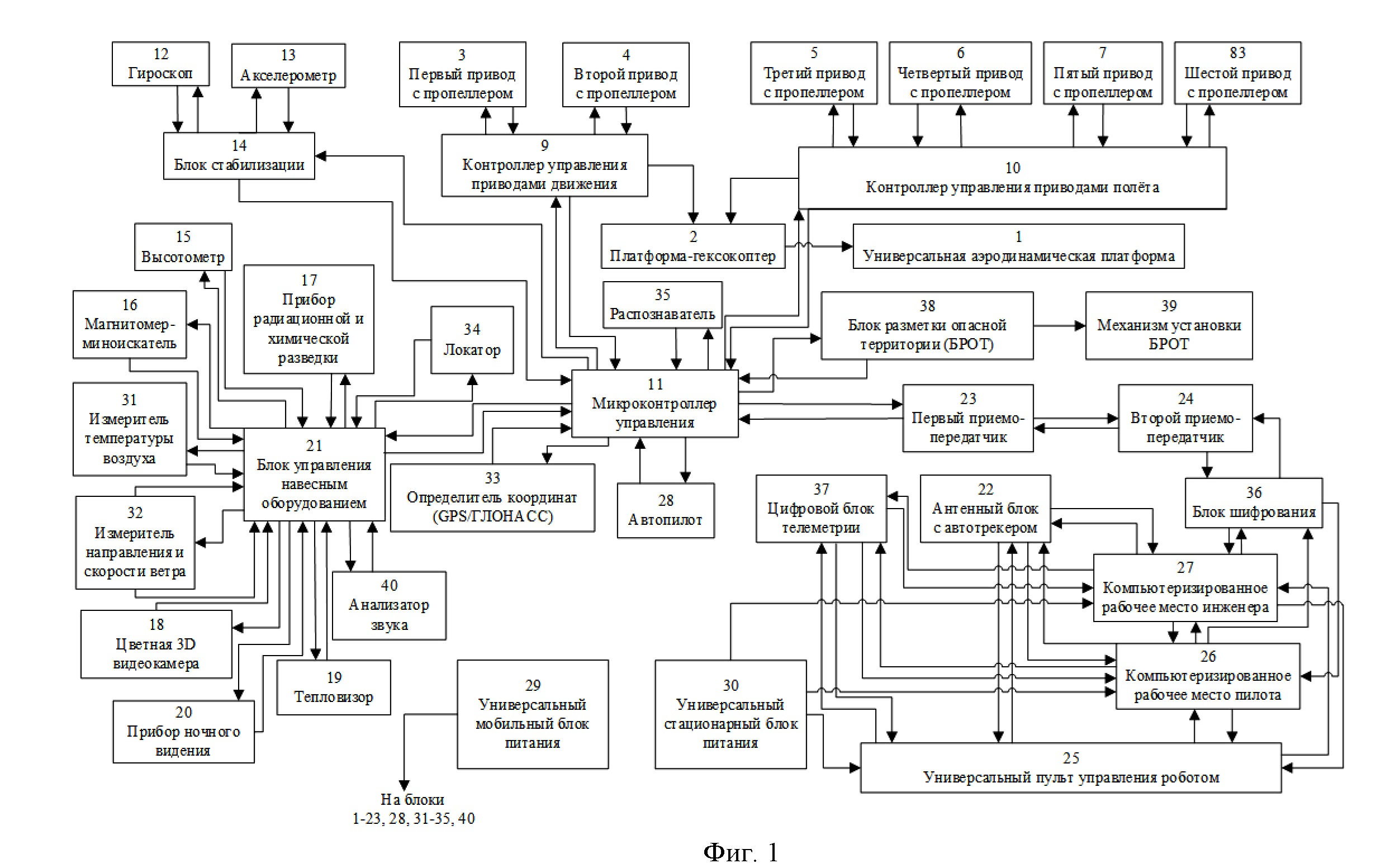
На фиг. 1 представлена структурная схема устройства.
На фиг. 2 представлена структурная схема аэродинамической решетки.
На фиг. 3 показана конструкция аэродинамической решетки.
На фиг. 4 приведена структура многослойного обода.
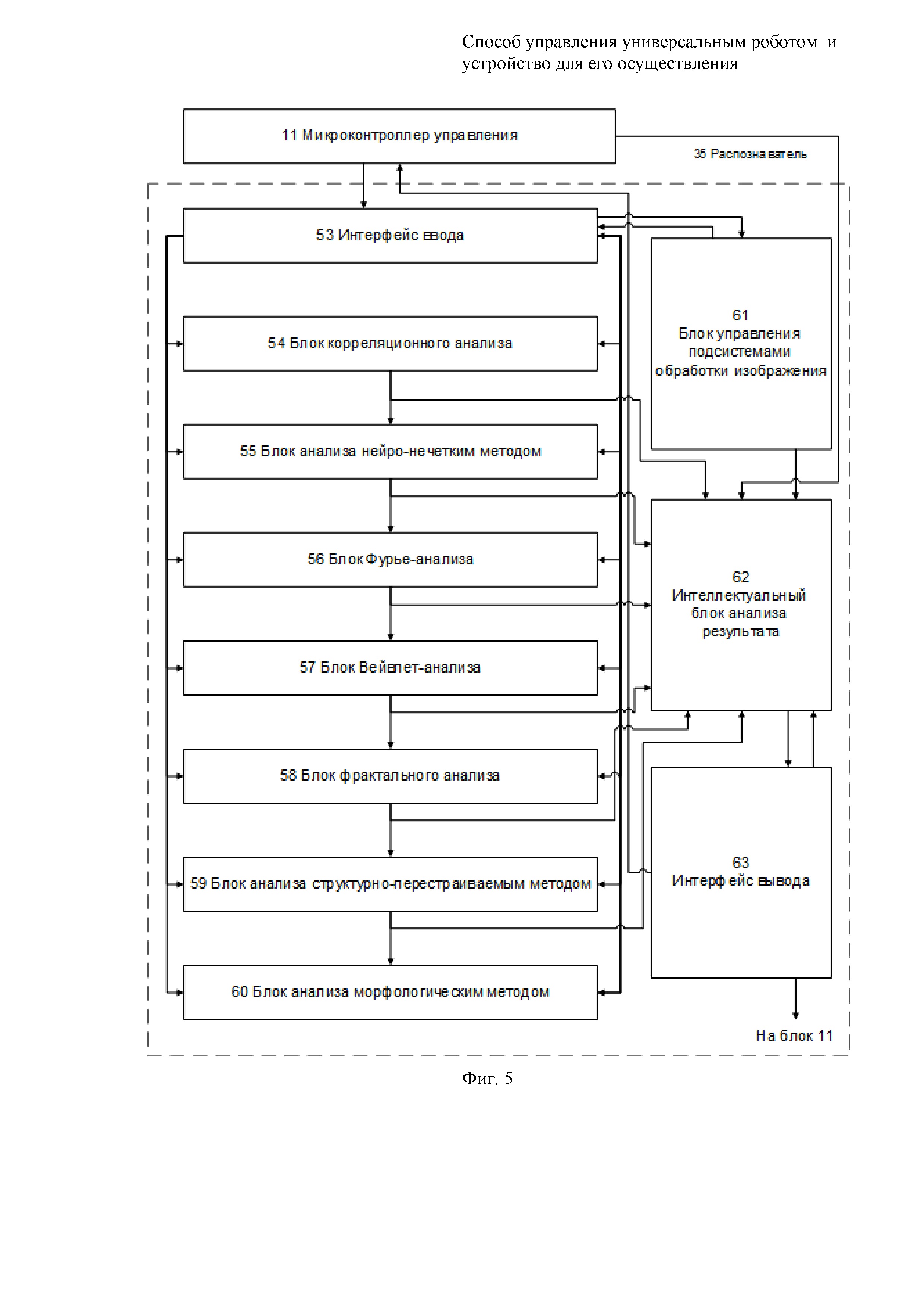
На фиг. 5 приведена структурная схема распознавателя.
На фиг. 6 представлена структурная схема блока автоматической разметки опасной территории.
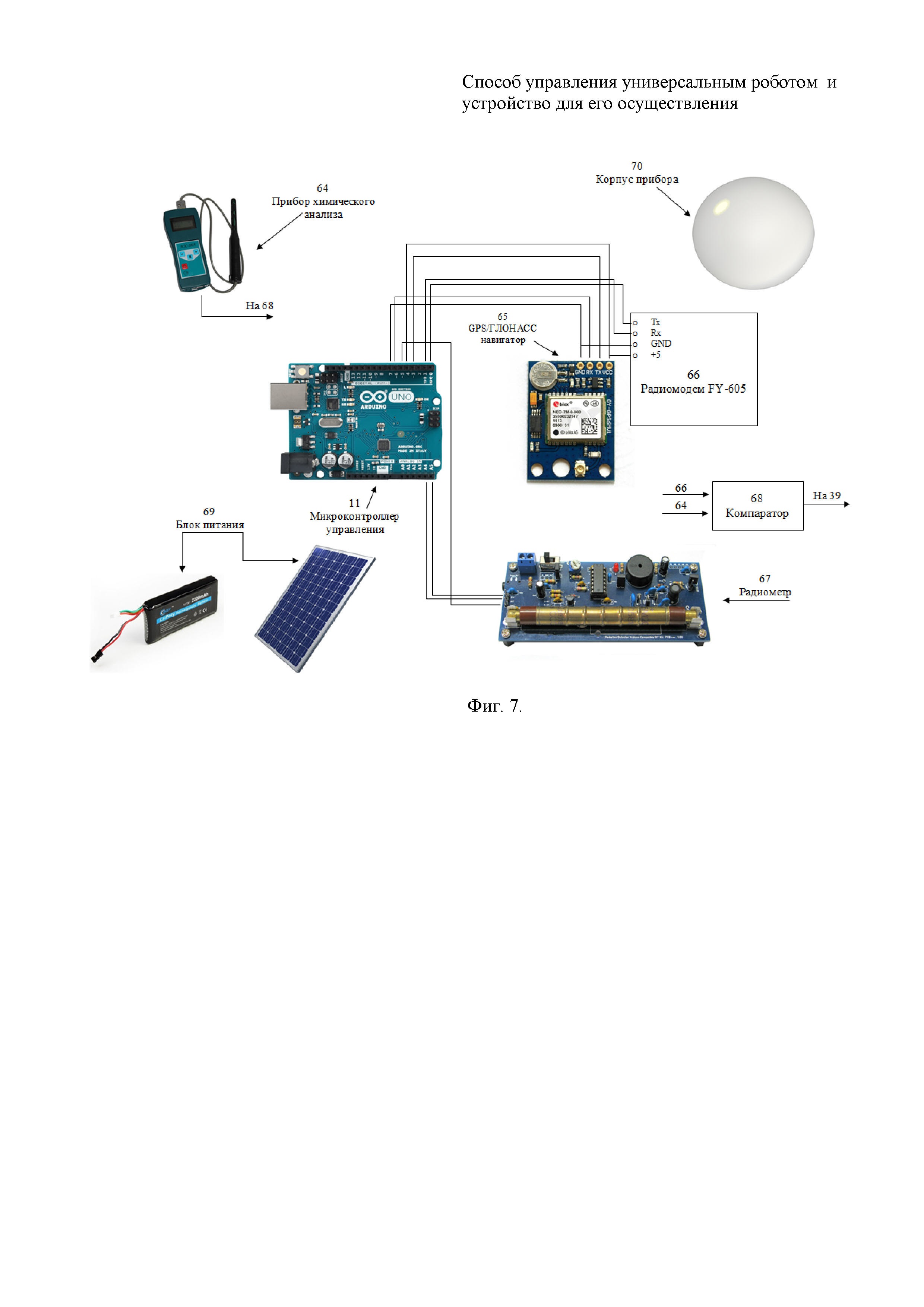
На фиг. 7 показан внешний вид и связи блока автоматической разметки опасной территории.
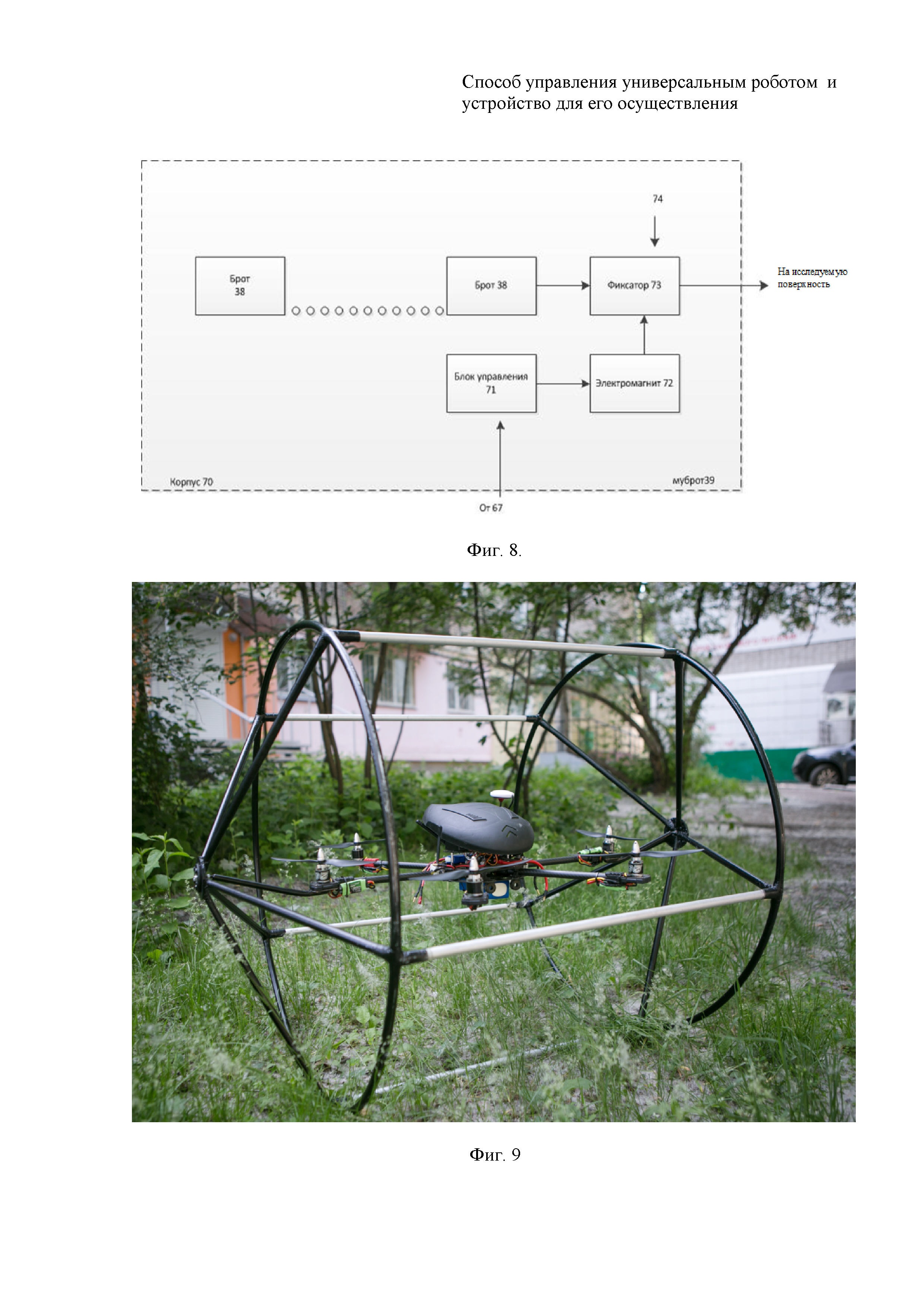
На фиг. 8 приведена структурная схема механизма установки на местности блоков разметки опасной территории.
На фиг. 9 показан внешний вид устройства (универсального робота УР).
На фиг. 1 показаны следующие приборы и блоки:
1 - универсальная аэродинамическая решетка УАР;
2 - платформа-гексокоптер ПГ с навесным оборудованием;
3 - первый привод с пропеллером (ППр);
4 - второй (2-ой) привод с пропеллером;
5 - третий (3-ий) привод с пропеллером;
6 - четвертый (4-ый) привод с пропеллером;
7 - пятый (5-ый) привод с пропеллером;
6 - шестой (6-ой) привод с пропеллером;
9 - контроллер управления приводами движения КУПД;
10 - контроллер управления приводами полета КУПП;
11 - микроконтроллер управления МУ;
12 - гироскоп;
13 - акселерометр;
14 - блок стабилизации БС;
15 - высотомер;
16 - магнитомер-миноискатель ММ;
17 - прибор радиационной и химической разведки ПРХР;
18 - цветная 3D видеокамера; 19-тепловизор;
20 - прибор ночного видения;
21 - блок управления навесным оборудованием БУНО;
22 - антенный блок с автотрекером АБА;
23 - первый приемопередатчик ППП;
24 - второй приемопередатчик ВПП;
25 - универсальный пульт управления роботом;
26 - компьютеризированное рабочее место пилота КРМП;
27 - компьютеризированное рабочее место инженера КРМИ;
28 - автопилот;
29 - универсальный мобильный блок питания УМБП;
30 - универсальный стационарный блок питания УСБП;
31 - измеритель температуры воздуха;
32 - измеритель направления и скорости ветра;
33 - определитель координат GPS-ГЛОНАСС;
34 - локатор;
35 - распознаватель;
36 - блок шифрования БШ;
37 - цифровой блок телеметрии ЦБК;
38 - блок разметки опасной территории БРОТ;
39 - механизм установки на местности блоков разметки опасной территории МУБРОТ;
40 - анализатор звук.
Устройство функционирует в двух режимах: 1) режим подготовки эталонного изображения и формирования программы работы; 2) режим выполнения заданных операций, и работает следующим образом.
В режиме формирования программы работы через универсальный пульт управления (УПУ) 25 включаются все блоки устройства, одновременно с компьютеризированного рабочего места инженера (КРМИ) 27 через первый и второй приемопередатчики (ППП, ВПП) 23, 24 в память микроконтроллера управления (МУ) 11 вводятся программа работы устройства и эталонные изображения (ЭИ) местности. ЭИ формируются, во-первых, в виде электронной карты местности методом тестированного проезда/пролета УР по территории, на которой планируется работать, во-вторых, методом математического и компьютерного моделирования или средствами системы ГЛОНАСС [3-7]. В процессе подготовки ЭИ включается платформа-гексокоптер ПГ 2 и с помощью универсальной аэродинамической решетки УАР 1 начинается движение по исследуемой территории. Движение системы ПГ 2 - УАР 1 управляется с помощью контроллера управления приводами движения (КУПД) 9, который включает первый привод с пропеллером (ППр 3) и второй привод с пропеллером (ППр 4). С помощью контроллера управления приводами полета (КУПП) 10 включаются третий, четвертый, пятый и шестой приводы с пропеллерами (ППр 5, ППр 6, ППр 7, ППр 8). ПГ 2 может быть гексокоптером (иметь шесть двигателей с пропеллерами, как представлено в описании) или с другим количеством приводов с пропеллерами.
Таким образом, с помощью КУПД 9, ППр 3 и ППр 4 обеспечивается движение по поверхности (грунт, вода, снег, лед), а с помощью КУПП 10, ППр 5, ППр 6, ППр 7 и ППр 8 производится движение по любой траектории в воздухе. Управление приводами с пропеллерами 3, 4, 5, 6, 7, 8 обеспечивает экономию энергоресурсов. Кроме этого, возможен разворот на месте системы ПГ 2 - УАР 1, когда, например, ППр 3 включается в одно направление (вперед), а ППр 4 включается в другое направление (назад), а также более мощный взлет и движение всей нагруженной системы по воздуху при включении приводов с пропеллерами 3, 4, 5, 6, 7, 8, у которых пропеллеры направлены вверх (плоскость пропеллера составляет 90° относительно вертикальной оси). Причем, все приводы с пропеллерами 3-8 могут изменять свое положение относительно вертикальной оси по сигналам от КУПД 9 и КУПП 10. Это обеспечивает высокую маневренность системы ПГ 2 - УАР 1, например, в случае ветреной погоды.
В процессе подготовки ЭИ воспринимается информация (изображения) об окружающей среде цветной 3D видеокамерой ЦВ 18, тепловизором 19, прибором ночного видения ПНВ 20, локатором 34, а также фиксируется информация от высотомера 15, магнитомера-миноискателя ММ 16, прибора радиационной и химической разведки ПРХР 17, измерителя температуры воздуха ИТВ 31, измерителя направления и скорости ветра ИНСВ 32 и определителя координат на базе GPS/ГЛОНАСС. При этом такими блоками, как высотомер 15, ММ 16, ПРХР 17, ЦВ 18, тепловизор 19, ПНВ 20, ИТВ 31 и ИНСВ 32 управляет блок управления навесным оборудованием БУНО 21 по сигналам от МУ 11. Кроме того, в режиме подготовки эталонного изображения определяются навигационные параметры от гироскопа 12 и акселерометра 13, фиксирующие координаты и скорость движения системы ПГ2 - УАР1 [9]. Работой гироскопа 12 и акселерометра 13 управляет блок стабилизации БС 14 по сигналам от МУ 11. При использовании заданной программы движения включается автопилот 28, управляющий системой ПГ2 - УАР1 на заданной траектории. Для исключения стороннего перехвата информации используется соответствующий блок шифрования 36, который кодирует информацию. Управляет устройством оператор с помощью компьютеризированного рабочего места пилота КРМП 26 (перемещение устройства), а вся информация отображается на дисплее компьютеризированного рабочего места инженера КРМИ 27 (сбор полученных данных). Обрабатывается и отображается информация на КРМП 26 и КРМИ 27 с помощью цифрового блока телеметрии ЦБТ 37. Для надежной связи используется антенный блок с автотрекером (АБА) 22, реализующий узконаправленный электронный пучок. В анализатор звука 40 записывается эталонная звуковая информация. На этом этап подготовки ЭИ заканчивается.
На втором этапе функционирования устройства (в режиме анализа и диагностики) все вышеперечисленные блоки функционируют аналогично этапу подготовки ЭИ, за исключением следующих вновь введенных операций. Включаются в работу распознаватель 35, обеспечивающий анализ и распознавание окружающей среды, коррекцию текущих координат обеспечивает микроконтроллер управления 11, накапливающий и анализирующий информацию и строящий стратегию выполнения поставленной задачи. При работе распознавателя 35 сравниваются ЭИ (эталонные изображения) и ТИ (текущие изображения); ТИ воспринимаются датчиками информации 18, 19, 20, 34, 40. Распознаватель 35 функционирует, используя корреляционный анализ, Фурье-анализ, Вейвлет-анализ, а также нейронечеткие, структурно-перестраиваемые и морфологические (структурные) методы (см. фиг. 5). МУ 11 функционирует на основе работы мозга [8]. В процессе работы предлагаемого устройства диагностируется (исследуется) и метится территория и выполняется другая требуемая задача. Анализатор звука 40, функционирующий аналогично распознавателя 35, распознает звук. Например, проводится радиационный и химический контроль (ПРХР 17), определяются места установки взрывчатых веществ (ММ 16) и других препятствий и особых мест. Эта информация запоминается и отображается на экранах КРМП 26 и КРМИ 27. Кроме электронного отображения информации об особых местах производится разметка опасной территории с помощью блока разметки опасной территории (БРОТ) 38 и механизма установки блоков-меток 39 непосредственно на местности. В случае необходимости оператор с помощью КРМП 26 переводит функционирование устройства по изобретению в автоматизированный (ручной) режим работы.
Универсальный мобильный блок питания УМБП 29, осуществляющий электропитание мобильной части устройства, состоит из аккумулятора, блока подзарядки на основе комплексного блока солнечной батареи и ветряного мини энергоблока. Универсальный стационарный блок питания выполнен в виде аккумулятора, выпрямителя переменного электрического тока, стабилизатора, блока подзарядки, комплексного блока солнечной батареи и ветряного мини энергоблока.
На фиг. 2 представлена структурная схема универсальной аэродинамической решетки (УАР), а на фиг. 3 дан внешний вид УАР.
УАР (см. фиг. 2) включает следующие блоки:
41 - горизонтальная ось;
42 - левый подшипник;
43 - правый подшипник;
44 - левый многослойный обод со спицами;
45 - правый многослойный обод со спицами;
46 - соединительная решетка;
47,48 - фиксирующие гайки;
49 - спицы (см. фиг. 3).
Соединения элементов УАР обеспечивают ей жесткую конструкцию, показанную на фиг. 3. УАР содержат два колеса, включающие два обода 44, 45 со спицами, соединяемые между собой горизонтальной осью 41, которая размещается в подшипниках 42, 43. Подшипники 42, 43 обеспечивают легкое вращение горизонтальной оси 38 и, как следствие, обеспечивают движение колеса аэродинамической платформы 1 в различных плоскостях. На горизонтальной оси жестко закрепляется мультикоптер 2, который с помощью двух двигателей (первый и второй приводы с пропеллерами 3, 4) обеспечивает движение по поверхности, а с помощью четырех двигателей (третий - шестой приводы с электродвигателями 5-8) осуществляет подъем и полет в пространстве.
На фиг. 4 представлено сечение многослойного обода 44, 45, которое содержит внутренний силовой полимерный каркас 50, заполнитель из пеноматериала 51 и внешний слой из карбона 52. Эта конструкция обеспечивает жесткость, легкость и способность перемещения по различным поверхностям (земля, снег, вода, болотистая местность, рыхлая почва и др.). Силовая конструкция обода имеет наборную конструкцию, позволяющую при максимальной жесткости и минимальном весе получить необходимый объем, обеспечивающий устройству запас плавучести. Кроме этого, данное решение позволяет уменьшить давление на грунт (например, при работе в качестве миноискателя).
На фиг. 5 представлена структурная схема распознавателя, состоящая из следующих блоков:
53 - интерфейс ввода;
54 - блок корреляционного анализа;
55 - блок анализа нейро-нечеткими методами;
56 - блок Фурье-анализа;
57 - блок вейвлет-анализа;
58 - блок фрактального анализа;
59 - блок анализа структурно-перестраиваемыми методами;
60 - блок анализа структурными (геометрическими или морфологическими) методами;
61 - блок управления подсистемами обработки изображений;
62 - интеллектуальный блок анализа результата;
63 - интерфейс вывода.
Распознаватель 35 функционирует следующим образом. Информация от микроконтроллера управления 11 (собирает сигналы от различных датчиков и сигналы синхронизации) поступает на интерфейс ввода 53, который одновременно передает сигналы на блок управления подсистемами обработки изображений 61 и на блоки корреляционного анализа 54, анализа нейро-нечеткими методами 55, Фурье-анализа 56, вейвлет-анализа 57, фрактального анализа 58, анализа структурно-перестраиваемыми методами 59 и анализа структурными (морфологическими) методами 60. Указанные блоки 54-60 работают в соответствии с алгоритмами, указанными в [3-7]. Таким образом, блоки 54-60 функционируют параллельно. Управляет работой блоков 54-60 блок управления подсистемами обработки изображений 61, обеспечивающий синхронизацию считывания информации в интеллектуальный блок анализа результата 62. Вся информация из блоков 54-60 (т.е. результаты работы этих блоков) передается в интеллектуальный блок анализа результата ИБАР 62, который через интерфейс вывода 63 обеспечивает поступление управляющих сигналов на микроконтроллер управления 11.
Правило распознавания изображений (т.е. способ работы распознавателя 35) описывается следующим решающим правилом:
где Pkn - вероятность распознавания изображения (изображение может быть видео или аудио); Pkn - является комплексным показателем распознавания;
 - значение коэффициента корреляции;
- значение коэффициента корреляции;
 - значение совпадения с эталонным изображением нейро-нечетким методом;
- значение совпадения с эталонным изображением нейро-нечетким методом;
 - значение совпадения с эталонным изображением методом Фурье-анализа;
- значение совпадения с эталонным изображением методом Фурье-анализа;
 - значение совпадения с эталонным изображением методом Вейвлет-анализа;
- значение совпадения с эталонным изображением методом Вейвлет-анализа;
 - значение совпадения с эталонным изображением методом фрактального анализа;
- значение совпадения с эталонным изображением методом фрактального анализа;
 - значение совпадения с эталонным изображением структурно-перестраиваемыми методами;
- значение совпадения с эталонным изображением структурно-перестраиваемыми методами;
 - значение совпадения с эталонным изображением морфологическим методом.
- значение совпадения с эталонным изображением морфологическим методом.
Значение 0,8 коэффициентов  установлено экспериментально. При этих значениях вероятность распознавания объектов (видео, аудио) гарантировано будет равна 1. Методики определения коэффициентов
установлено экспериментально. При этих значениях вероятность распознавания объектов (видео, аудио) гарантировано будет равна 1. Методики определения коэффициентов  описаны в [3-8]. Таким образом ИБАР 62 работает в соответствии с правилом (1).
описаны в [3-8]. Таким образом ИБАР 62 работает в соответствии с правилом (1).
На фиг. 6 приведена структурная схема блока разметки опасной территории (БРОТ) 38, которая содержит следующие приборы:
64 - прибор химического анализа;
65 - навигатор GPS/ГЛОНАСС;
66 - радиомодем;
67 - радиометр;
68 - компаратор;
69 - блок питания;
70 - корпус.
БРОТ 38 работает следующим образом. Навигатор GPS/ГЛОНАСС 63 определяет координаты местонахождения БРОТ [9]. Прибор химического анализа (ПХА) 64 определяет состав и концентрацию окружающей среды путем оценки ее молекулярного и химического состава и физических характеристик [10]. Радиометр 67 определяет радиационный состав и вычисляет критическую опасную для человека радиацию [11]. Радиомодем 66 обеспечивает связь между БРОТ 38 и микроконтроллером управления (МУ) 11. Компаратор 68 анализирует информацию, поступающую от ПХА 64, радиомодема 65 и в случае необходимости (критических, химических или радиационных характеристик) или по команде от МУ 11 через радиомодем 65 включается механизм установки блоков разметки (МУБРОТ) 39, который устанавливает блок разметки в требуемое место исследуемой территории. Блок разметки выполняет функцию маяка и располагается в прочном, прозрачном и круглом корпусе 70. Блок электропитания 69 включает аккумулятор, блок подзарядки и солнечную батарею.
На фиг. 7 показан внешний вид и некоторые связи блока разметки опасной территории. Представленное изображение БРОТ 38 понятно и не требует специальных разъяснений.
На фиг. 8 приведена структурная схема механизма установки блоков разметки опасной территории (МУБРОТ) 39, которая включает следующие блоки:
70 - корпус (емкость);
71 - блок управления;
72 - электромагнит;
73 - фиксатор;
74 - отверстие;
38 - блоки разметки (маяки особенностей территории).
МУБРОТ 39 функционирует следующим образом. Мобильные БРОТ (маяки) 38 размещаются в корпусе 70. Корпус 70 представляет собой закрытый кожух (емкость) с наклонным основанием, имеющим направляющую канавку с отверстием 74 в нижней части. Отверстие 74 имеет размер, равный диаметру БРОТ 38. Это отверстие 74 закрывается фиксатором 73, который выполнен в виде плоского стержня. Если фиксатор 73 втягивается электромагнитом 72, то отверстие 74 открывается и БРОТ 38 продвигается на поверхность исследуемой территории. Электромагнит 72 управляется блоком управления 71, который связан с компаратором 68.
Устройство по изобретению имеет значительно лучшие технические характеристики по сравнению с ближайшим аналогом. Эти лучшие характеристики заключаются в следующем.
1. Повышается точность определения координат местоположения устройства за счет введения определителя координат GPS/ГЛОНАСС 33, высотомера 15, измерителя направления и скорости ветра 32, гироскопа 12, акселерометра 13, блока стабилизации 14, распознавателя 35, микроконтроллера управления 11, автопилота 28, цветной 3 Ввидеокамеры 18, тепловизора 19, прибора ночного видения 20 и блока управления навесным оборудованием 21. Высокая точность местоположения робота достигается благодаря более высокой точности оценки координат и использования дополнительной информации при сравнении текущего и эталонного изображений.
2. Обеспечиваются автоматический и автоматизированный режимы управления устройством. Автоматизированный режим осуществляется оператором с помощью универсального пульта управления 25, компьютеризированного рабочего места пилота 26 и компьютеризированного рабочего места инженера 27. Автоматический режим выполняется по автоматической программе, записанной в память микроконтроллера 11, и при ее адаптации (подстройке программы и параметров) с использованием информации от распознавателя 35, автопилота 28, а также всей текущей информации, поступающей в микроконтроллер управления 11.
3. Расширяются функциональные возможности устройства, заключающиеся, во-первых, в возможности перемещения по земле, снегу, льду и воде за счет многослойного обода 44, 45 двухколесного шасси, а также движения по заминированной территории (т.к. уменьшено давление на грунт), во-вторых, в возможности движения в любое время суток, в способности перемещения по горизонтальной и наклонной поверхности, распознавания и обхода препятствий путем использования цветной 3D видеокамеры 18, тепловизора 19, прибора ночного видения 20, локатора 34, высотомера 15 и распознавателя 35, в-третьих, в обеспечении поиска взрывчатых веществ, разметки опасных мест и оценки окружающей среды с помощью магнитомера-миноискателя 16, прибора радиационной и химической разведки 17 и измерителя температуры воздуха 31, в-четвертых, в возможности нанесения на электронную карту местности опасных участков (заминированных, химически и радиационно опасных) и других опасных объектов (техники, препятствий и др.), в-пятых, в возможности перевозки большей массы полезного груза из-за уменьшения давления на грунт, снег, лед и воду, в-шестых, распознавания изображений различных размерностей и цветностей, а также звуковой информации.
4. Увеличение маневренности и управляемости (приспосабливаемости) к изменяющейся ветровой обстановке (скорости и направления ветра) путем изменения направления и скорости вращения пропеллеров электроприводов блоков 3-8.
5. Повышение быстродействия и оперативности выполнения заданных операций за счет реализации параллельных вычислений, анализа и обработки многомерной информации (в том числе 3D изображений), выполнения автоматического и автоматизированного режимов работы.
6. Увеличение длительности автономного режима работы за счет использования универсального мобильного блока питания 29 и универсального стационарного блока питания 30, которые состоят из аккумуляторов и подзарядных блоков на основе солнечных батарей и ветряного мини энергоблока.
7. Улучшение удобства обслуживания устройства за счет дополнительно введенных компьютеризированных рабочих мест пилота 26 и инженера 27, выполнения автоматического и автоматизированного режимов управления роботом, предоставления различной информации о состоянии функционирования робота и состоянии внешней среды, а также быстрой сборки, разборки и транспортировки устройства.
8. Обеспечение безопасности функционирования устройства путем использования различной информации о состоянии внешней среды (блоки 15-20, 31, 32), распознавания объектов внешней среды (распознаватель 35) и выработки безопасных управляющих движений микроконтроллером управления 11.
9. Обеспечение собственной информационной безопасности работы устройства, осуществляемой блоком шифрования 36.
Источники:
1. Kalantari A., Spenko М. Design and Experimental Validation of Hy TAQ, a Hybrid Terrestrial and Aerial Quadrotor // IEEE International Conference on Robotics and Automation (ICRA), 2013.
2. Торгашев Л.А., Гуцул В.И., Романенко С.В. Разработка и создание робототехнической платформы повышенной проходимости, как элемент обеспечения ликвидации чрезвычайных ситуаций // Вестник науки Сибири. 2013. №4(10). Стр. 104-108.
3. Сырямкин В.И. Информационные устройства и системы в робототехнике и мехатронике: учебное пособие. (Серия: Интеллектуальные технологические системы). - Томск: Изд-во Том. ун-та, 2016. - 524 с. (см. стр. 139-236, 424-432, 468-487).
4. Абрамова Т.В., Ваганова Е.В., Горбачев С.В., Сырямкин В.И., Сырямкин М.В. Нейро-нечеткие методы в интеллектуальных системах обработки и анализа многомерной информации. - Томск: Изд-во Том. ун-та. 2014. - 442 с. (см. стр. 9-71, 338-434).
5. Горбачев С.В., Емельянов С.Г., Жданов Д.С., Мирошниченко С.Ю., Сырямкин В.И., Титов Д.В. Цифровая обработка аэродинамических изображений. - Томск: Изд-во Том. ун-та, 2016. - 304 с. (см. стр. 24-64, 96-211, 250-276).
6. Сырямкин В.И., Соломонов Ю.С, Соломонов Л.С. и др. Способ управления движущимся объектом и устройство для его осуществления. Патент на изобретение РФ, №2476825 от 10.03.2011. Публ. 27.02.2013. Бюл. №6.
7. Сырямкин В.И., Шидловский B.C. Корреляционно-экстремальные радионавигационные системы. Томск: Изд-во Том. ун-та, 2010. - 316 с. (см. стр. 73-183).
8. Шумилов В.Н. Принципы функционирования мозга. - Томск: Изд-во Том. ун-та, 2015. - 188 с.
9. Ориентация и навигация подвижных объектов: современные информационные технологии / Под ред. Б.С. Алешина и др. - М.: ФИЗМАТЛИТ, 2006. - 424 с.
10. Бубенчиков М.А. и др. Современные методы исследования материалов и нанотехнологий / Под ред. д. т.н., профессора В.И. Сырямкина. - Томск: Изд-во Том. ун-та. 2010. - 366 с.
11. Богомолов Е.Н. и др. Метрология и сертификация диагностического оборудования и материалов. - Томск: Издательский Дом Томского государственного университета, 2015. - 164.
12. Измерители и анализаторы. [Электронный ресурс] / URL: http://www.rhbz.rti/appendices/measuring-instmments-analyzers.html
13. Все о металлоискателях и металлодетекторах. Принципы работы. Электронный ресурс URL: http://izmer-ls.ru/met/sche1-1.html
Способ получения катализатора на основе ceo-snо на стеклотканном носителе
Катализатор переработки этанола и способ получения ацетальдегида и водорода из этанола с использованием этого катализатора
Способ подготовки культур сульфидогенных бактерий для выделения днк
Способ очистки донных отложений и воды от нефти и нефтепродуктов под ледовым покровом в водоемах
Способ получения сложного алюмината кальция-магния
Способ предпосевной обработки семян зерновых культур
Способ определения селена(iv)
Способ зеленого черенкования плодовых и ягодных культур
Способ увеличения семенной и сырьевой продуктивности посконника коноплевидного в условиях ex situ
Способ очистки донных отложений водоемов от нефти и нефтепродуктов и устройство для его осуществления
Способ управления движущимся объектом и устройство для его осуществления
Манипулятор рентгеновского микротомографа
Способ рентгеновской томографии и устройство для его осуществления
Способ контроля сердечно-легочной реанимации и устройство для его осуществления
Устройство анализа бронхофонограмм
Способ диагностики состояния органов человека или животного и устройство для его осуществления
Трубопроводный диагностический робот
Комплекс распределенного управления интеллектуальными роботами для борьбы с малогабаритными беспилотными летательными аппаратами
Робот для диагностики и ремонта трубопроводного транспорта
Многофункциональный медиакомплекс для транспорта с сетевым управлением и видеоаналитикой

