Результат интеллектуальной деятельности: БИНАРНЫЙ МАЛОРАЗМЕРНЫЙ КОСМИЧЕСКИЙ АППАРАТ С РЕКОНФИГУРИРУЕМОЙ АНТЕННОЙ, СОВМЕЩЕННОЙ С ГИБКОЙ РАЗВЕРТЫВАЕМОЙ ЛЕНТОЧНОЙ СОЛНЕЧНОЙ БАТАРЕЕЙ
Вид РИД
Изобретение
Изобретение относится к малоразмерным космическим аппаратам (МКА), классифицируемым как пикоспутники (CubeSat) - весом менее 1000 грамм, фемтоспутники - весом менее 100 грамм, аттоспутники весом менее 10 грамм и предназначенные для создания реконфигурируемых антенных полей на базе одного или нескольких МКА.
Известен космический аппарат микрокласса дистанционного зондирования Земли, созданный на базе стандарта CubeSat, содержащий корпус в форме параллелепипеда с солнечными батареями на основе многослойной печатной платы с фотоэлектрическими элементами, блоки питания и управления, антенны, приемопередатчик, оптико-электронную систему, три двигателя-маховика, солнечный датчик, микроконтроллер управления [1].
Недостатком устройства является отсутствие возможности развертывания и свертывания в рулон гибкой тонкопленочной ленточной солнечной батареи, совмещенной с коллинеарной антенной при помощи мультивекторных матричных ракетных двигателей, осуществляющих одновременно функцию ориентацию МКА.
Наиболее близким по технической сущности является микро-спутник с солнечной батареей, выполненной в виде гибкой подложки с нанесенными тонкопленочными солнечными фотоэлементами, намотанной при выведении вокруг корпуса микро-спутника и развертываемой с помощью пружин после выхода на заданную орбиту. Микро-спутник содержит: корпус спутника, механизм развертывания на базе торсионных пружин, солнечные батареи, выполненные из гибкой подложки с нанесенными тонкопленочными фотоэлементами, двигатели, антенны, солнечный датчик, конусный узел стыковки с другим спутником [2].
Недостатком устройства является отсутствие возможности развертывания и свертывания в рулон гибкой тонкопленочной ленточной солнечной батареи, совмещенной с коллинеарной антенной при помощи мультивекторных матричных ракетных двигателей, осуществляющих одновременно функцию ориентацию МКА.
Отличие предлагаемого технического решения от выше изложенных заключается во введение двух мультивекторных матричных ракетных двигателей, соединенных с выдвижными телескопическими штангами, выдвижение которых осуществляется с помощью линейных шаговых двигателей, что позволило двумя двигателями осуществить развертывание и свертывание гибкой ленточной подложки с нанесенными тонкопленочными солнечными фотоэлементами и коллинеарной антенной с одновременной ориентацией МКА. Это также дало возможность оперативно перестраивать диапазон и диаграмму направленности коллинеарной антенны, а при возникновении угрозы столкновения МКА, свертывать гибкую диэлектрическую ленту подложки, а после пролета космического объекта снова развернуть, исключив их столкновение без изменения параметров орбиты, также максимально удалить сопла двигателей от коллинеарной антенны, что в свою очередь позволило снизить уровень собственных помех, влияющих на прием слабых радиосигналов. Введение первого и второго лазерных дальномеров, оптические оси которых расположены параллельно плоскости гибкой ленточной подложки и направлены встречно на центры второй и первой ПЗС-матриц, реагирующих только на выделенную длину электромагнитных волн, позволило получить информацию о расстоянии между двумя кубическими корпусами и формировать сигнал о величине отклонения оптических осей от центров ПЗС-матриц для отработки двигателями возмущающих факторов (для исключения закручивания гибкой диэлектрической ленточной подложки и удержании ее в оптимально натянутом состоянии). Использование различных выделенных длин волн электромагнитного излучения оптического диапазона при встречно направленной работе двух лазерных дальномеров позволило исключить влияние пассивных помех в виде отражений от рядом расположенных поверхностей. Введение двух датчиков штрих-кода и позиционной штрих-кодовой ленты, нанесенной по краю гибкой диэлектрической ленточной подложки и жестко привязанной к ее длине в соответствии с механически нанесенными значениями кодовых слов, позволило получать информацию о фактической длине выпущенной ленты и исключить ошибки от неплотной намотки. Это также позволило оперативно продолжить работу не с начала (с нулевой позиции) развертывания, а с места остановки ленты или получить кодовую инструкцию по ликвидации ошибки непосредственно с датчика штрих-кода при сканировании им определенной позиции штрих-кода в случае сбоя, отказа или выхода из строя контроллера, для перезагрузки оставшегося контроллера, что также сокращает время восстановления работоспособности и увеличивает живучесть системы. Введение дисковых токосъемников, соединенных с вращающимися катушками, закрепленными на осях реверсивных шаговых двигателей, позволило оперативно разматывать на заданную длину гибкую диэлектрическую ленточную подложку без нарушения электрических контактов, что дает возможность изменять количество вырабатываемой электрической энергии, проводить перенастройку параметров коллинеарной антенны, изменяя ее длину, постоянно проводить обмен информацией между кубическими корпусами по двунаправленному проводному каналу связи без выхода в эфир, что снижает количество помех, поступающих в коллинеарную антенну. Введение наноструктурированной контактной ленты с управляемой адгезией с помощью электромагнитного поля, создаваемого электромагнитами, позволило организовать компактные стыковочные узлы для быстрой самосборки антенной конструкции состоящей из нескольких МКА. Это также позволяет закрепляться МКА на любые гладкие необорудованные для стыковки поверхности, например, на солнечные панели ранее запущенных более крупных МКА для создания и реконфигурирования гибридных радиосистем.
Техническим результатом является возможность осуществления развертывания и свертывания в рулон гибкой тонкопленочной ленточной солнечной батареи, совмещенной с коллинеарной антенной при помощи мультивекторных матричных ракетных двигателей, осуществляющих одновременно с развертыванием функцию ориентацию МКА.
Технический результат предложенного изобретения достигается совокупностью существенных признаков, а именно: бинарный малоразмерный космический аппарат с реконфигурируемой антенной, совмещенной с гибкой ленточной солнечной батареей, развертываемой мультивекторным матричным ракетным двигателем, содержащий корпус, гибкую подложку с нанесенными на нее тонкопленочными солнечными фотоэлементами, стабилизатор, механизм развертывания подложки, ракетные двигатели, антенну, приемопередатчик, солнечный датчик, узел стыковки, два линейных шаговых двигателя, две выдвижные телескопические штанги, два мультивекторных матричных ракетных двигателя, два лазерных дальномера, две ПЗС-матрицы, два реверсивных шаговых двигателя, две катушки, гибкую диэлектрическую ленточную подложку, информационную шину, коллинеарную антенну, позиционную штрих-кодовую ленту, два датчика штрих-кода, два дисковых токосъемника, два контроллера, два электромагнита, две стыковочные наноструктурированные контактные ленты с управляемой адгезией, причем, корпус состоит из первого и второго разделяемых кубических корпусов, соединенных с первой и второй прямоугольными панелями, между которыми закреплена гибкая подложка с тонкопленочными солнечными фотоэлементами, которая выполнена в виде диэлектрической ленты с возможностью свертывания в рулон, на свободные зоны, расположенные параллельно краям которой нанесены штрих-кодовая позиционная лента, коллинеарная антенна, силовые и информационные шины, соединенные электрически с первым и вторым дисковыми токосъемниками, причем, механизм развертывания подложки состоит из первого и второго мультивекторных матричных ракетных двигателей, механически соединенных через первую и вторую выдвижные телескопические штанги с первым и вторым линейными шаговыми двигателями, а информационные входы которых соединены с первыми и вторыми информационными выходами первого и второго контроллеров, третьи информационные выходы которых соединены с входами первого и второго реверсивных шаговых двигателей, механически соединенных с осями первой и второй катушек, электрически соединенных через первый и второй дисковые токосъемники с первым и вторым стабилизаторами напряжения, первым и вторым приемопередатчиками, первым и вторым контроллерами, двунаправленные шины которых, соединены с первым и вторым лазерными дальномерами, работающими на различных выделенных длинах волн электромагнитного излучения, оптические оси которых направлены встречно-параллельно на центы второй и первой ПЗС-матриц, реагирующих на выделенные длины волн, информационные выходы которых соединены с первыми информационными входами первого и второго контролеров, вторые и третьи информационные входы которых соединены с информационными выходами первого и второго датчиков штрих-кода и выходами первого и второго солнечных датчиков, закрепленных на ребрах первой и второй прямоугольных панелей, на противоположных плоских поверхностях которых размещены первый и второй лазерные дальномеры, и первая и вторая ПЗС-матрицы, установленные напротив друг друга и перпендикулярно граням первого и второго кубических корпусов, а шины электропитания первого и второго контроллеров соединены с выходами первого и второго стабилизаторов напряжения и шинами питания первого и второго приемопередатчиков, кроме того, стыковочные узлы выполнены с наноструктурированными захватами и закреплены на свободных гранях первого и второго кубических корпусов в виде первой и второй стыковочной наноструктурированной контактной ленты с управляемой адгезией, активируемой при помощи первого и второго электромагнитов, электрически соединенных с четвертыми выходами первого и второго контроллеров.
Под словосочетанием бинарный малоразмерный космический аппарат (МКА) - понимается МКА, состоящий из двух кубических корпусов и одной общей гибкой ленточной солнечной батареи, расположенной между ними, разворачиваемой за счет имеющейся возможности перемещения одного корпуса относительно другого в противоположные стороны (например, с помощью ракетных двигателей). Гибкая ленточная солнечная батарея - это гибкая диэлектрическая ленточная подложка, на которую нанесен массив соединенных между собой тонкопленочных солнечных фотоэлементов.
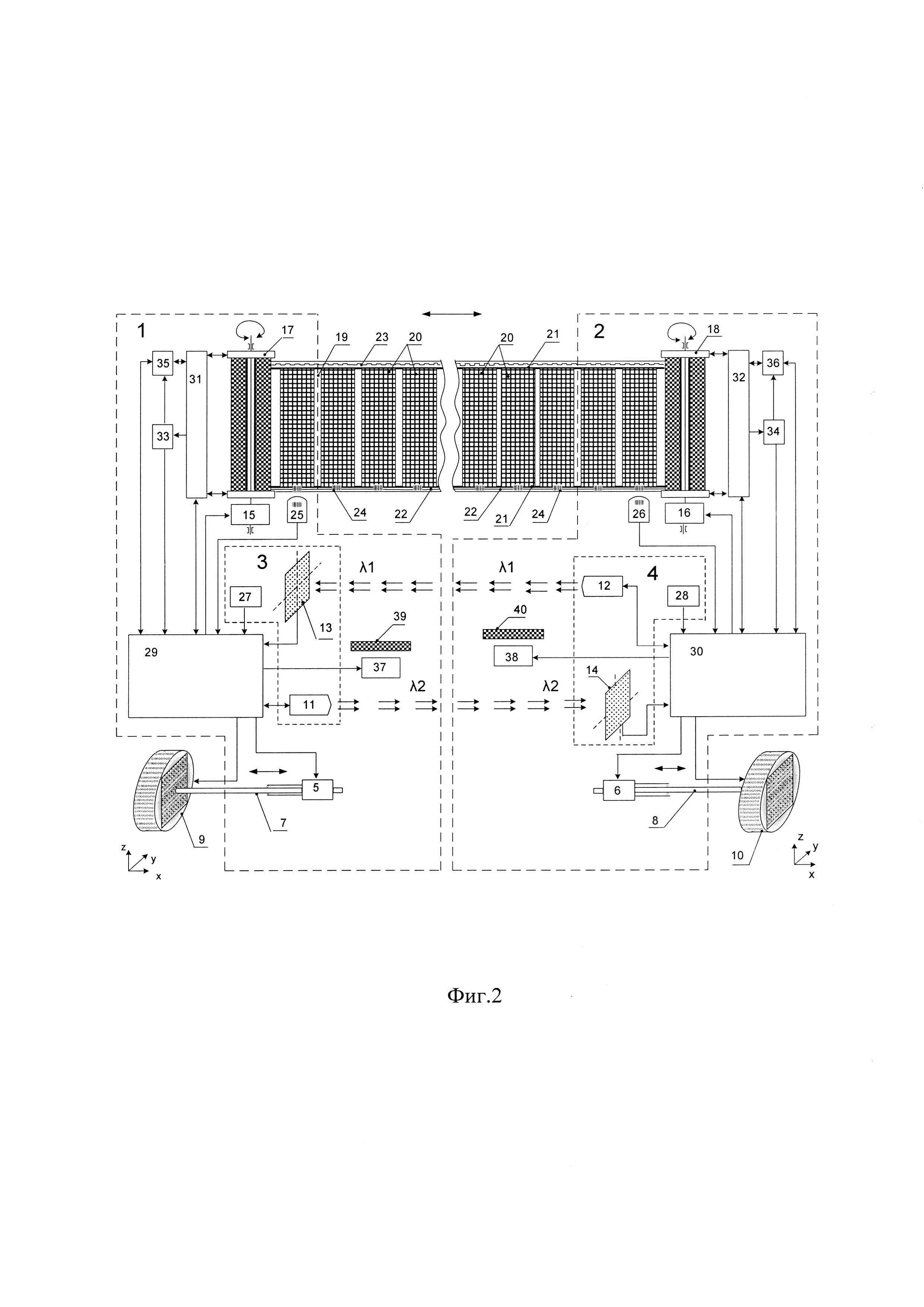
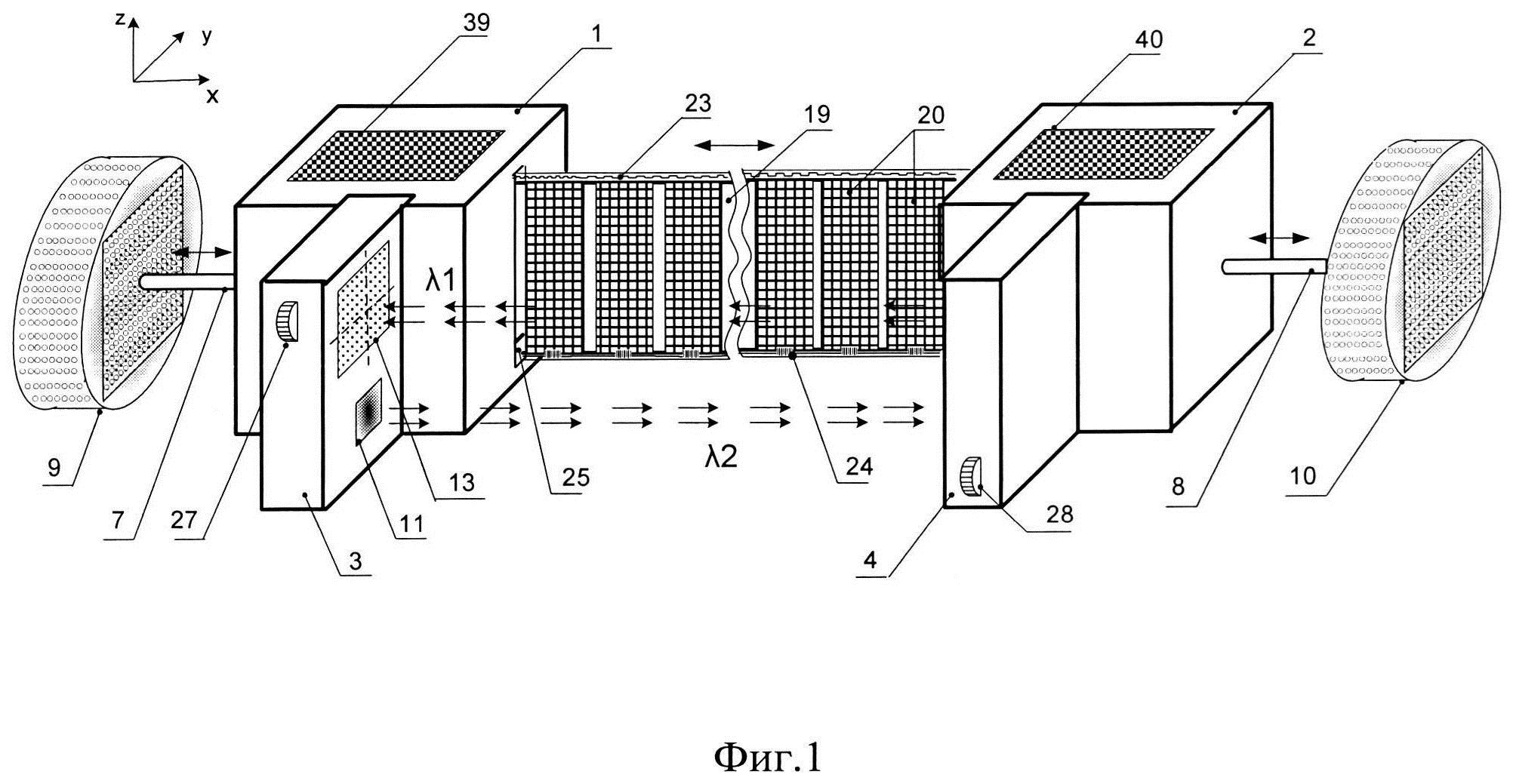
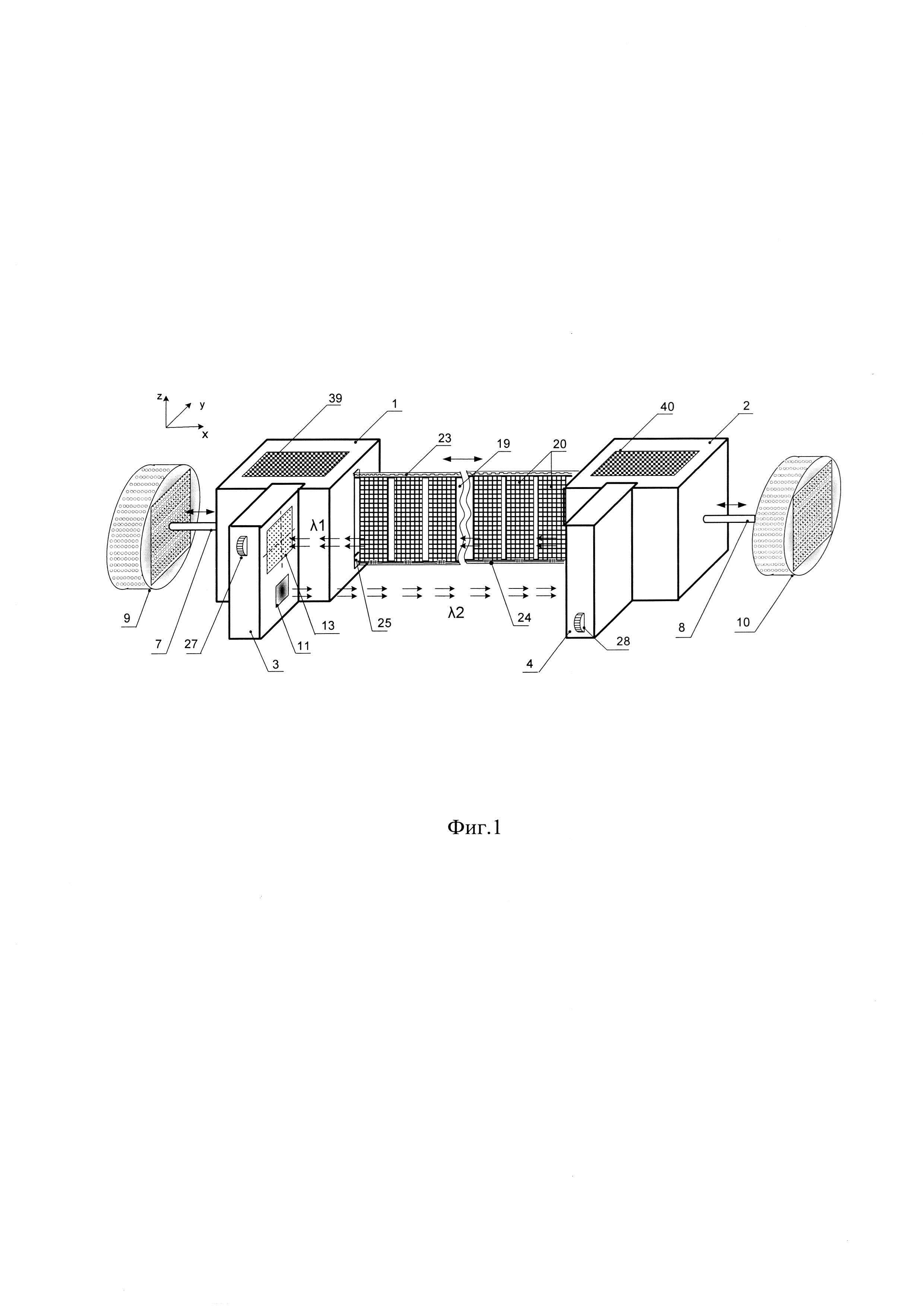
Сущность изобретения поясняется на Фиг. 1, где представлен бинарный малоразмерный космический аппарат с реконфигурируемой антенной, совмещенной с гибкой ленточной солнечной батареей, развертываемой мультивекторным матричным ракетным двигателем в момент развертывания гибкой ленточной солнечной батареи. На Фиг. 2 представлена структурная блок-схема бинарного малоразмерного космического аппарата с реконфигурируемой антенной, совмещенной с гибкой ленточной солнечной батареей, развертываемой мультивекторным матричным ракетным двигателем. На Фиг. 3, Фиг. 4, Фиг. 5 поясняются этапы развертывания гибкой солнечной батареи. Фиг. 3, первый этап - выполнение тестирования после выведения на заданную орбиту. Фиг. 4, второй этап - выполнение развертывания гибкой солнечной батареи. Фиг. 5, третий этап - выполнение развертывания гибкой солнечной батареи с одновременной ориентацией ее на Солнце.
Бинарный малоразмерный космический аппарат с реконфигурируемой антенной, совмещенной с гибкой ленточной солнечной батареей, развертываемой мультивекторным матричным ракетным двигателем, содержит: (Фиг. 1) первый кубический корпус 1, второй кубический корпус 2, первую 3 и вторую 4 прямоугольные панели, первый 5 и второй 6 линейные шаговые двигатели, (Фиг. 2) первую 7 и вторую 8 выдвижные телескопические штанги, первый 9 и второй 10 мультивекторные матричные ракетные двигатели, первый 11 и второй 12 лазерные дальномеры, первую 13 и вторую 14 ПЗС-матрицы, первый 15 и второй 16 реверсивные шаговые двигатели, первую 17 и вторую 18 катушки, гибкую диэлектрическую ленточную подложку 19, тонкопленочные солнечные фотоэлементы 20, силовые шины 21, информационную шину 22, коллинеарную антенну 23, позиционную штрих-кодовая ленту 24, первый 25 и второй 26 датчики штрих-кода, первый 27 и второй 28 солнечные датчики, первый 29 и второй 30 контроллеры, первый 31 и второй 32 дисковые токосъемники, первый 33 и второй 34 стабилизаторы напряжения, первый 35 и второй 36 приемопередатчики, первый 37 и второй 38 электромагниты, первую 39 и вторую 40 стыковочные наноструктурированные контактные ленты с управляемой адгезией. На фиг. 2 в границах замкнутых пунктирных линий расположены элементы, конструктивно размещенные в первом 1 и втором 2 кубических корпусах и в первой 3, и второй 4 прямоугольных панелях. λ1 и λ2 - выделенные различные длинны волн электромагнитного излучения оптического диапазона первого и второго лазерных дальномеров.
Для осуществления изобретения могут быть использованы, например, известные технологии изготовления компонентов. В качестве двигателей может быть использован ракетный двигатель с цифровым управлением величины и направления тяги, который состоит из матриц реверсивных многоразрядных двоичных двигательных ячеек с твердым топливом и перпендикулярно размещенных им радиальных многоразрядных двоичных двигательных ячеек с твердым топливом, расположенных по кольцу вокруг реверсивных ячеек, обеспечивающих генерацию множества разнонаправленных векторов тяги с прецизионным цифровым управлением в двоичном коде величиной тяги каждой ячейки. [3, 4].
При изготовлении гибкой солнечной батареи могут быть использованы известные технологии изготовления гибких солнечных тонкопленочных батарей, выполненных на базе гибкой подложки с нанесенными тонкопленочными фотогальваническими элементами, изготовленными по меньшей мере, из аморфного кремния (a-Si), теллурида кадмия (CdTe), арсенида галлия (GaAs) [2]. Максимальная рабочая площадь солнечной батареи определяется максимальной длиной размотки и шириной ленты, при этом накладываются ограничения: максимальная длина гибкой диэлектрической ленточной подложки 19 определяется дальностью уверенной работы компактного лазерного дальномера. Максимальная вместимость катушек определяется габаритами МКА. Минимальная толщина гибкой диэлектрической ленточной подложки определяется ее прочностью.
Для изготовления стыковочной наноструктурированной контактной ленты может быть использована известная наноструктура, позволяющая управлять механизмом силы адгезии в вакууме. Наноструктура [5] содержит подложку и множество легированных ферромагнитным материалом нановолокон, прикрепленных к подложке. При соприкосновении с гладкой поверхностью объекта каждое нановолокно массива входит в зацепление с контактируемой поверхностью посредством межмолекулярных ван-дер-ваальсовых сил, осуществляя «сухое» склеивание объектов. Отделение от объекта происходит при генерации магнитного поля, которое сгибает нановолокна, содержащие ферромагнитные компоненты, ориентируя их по направлению магнитных силовых линий, что происходит без применения механической нагрузки при отрыве на нановолокна.
Устройство работает следующим образом: после вывода на орбиту МКА включаются первый 5 и второй 6 линейные шаговые двигатели, осуществляющие выдвижение телескопических штанг 7 и 8, отводящие первый 9 и второй 10 мультивекторные матричные ракетные двигатели от первого 1 и второго 2 кубических корпусов. Одновременно включаются первый 11 и второй 12 лазерные дальномеры, работающие на выделенных длинах волн λ2 и λ1, оптические оси которых направлены на центры первой 13 и второй 14 ПЗС-матриц, реагирующих только на различные выделенные длины волн электромагнитного излучения λ1 и λ2 оптического диапазона для исключения влияния помех от активных или пассивных источников. После проверки работоспособности первого 11 и второго 12 лазерных дальномеров и первой 13 и второй 14 ПЗС-матриц включается второй 10 мультивекторный матричный ракетный двигатель, одновременно включается первый 15 и второй 16 реверсивные шаговые двигатели, механически соединенные с осями первой 17 и второй 18 катушек, при вращении которых начинается сброс с первой 17 и второй 18 катушек гибкой диэлектрической ленточной подложки 19 с нанесенными на нее тонкопленочными солнечными фотоэлементами 20 синхронно с отдалением второго кубического корпуса 2 относительно первого кубического корпуса 1. Первый 25 и второй 26 датчики штрих-кода дают информацию о длине фактически выпущенной гибкой диэлектрической ленточной подложки 19 при сканировании позиционной штрих-кодовой ленты 24 для сравнения ее с информацией о расстоянии между первым 1 и вторым 2 кубическими корпусами, полученной от первого 11 и второго 12 лазерных дальномеров. Это сделано для выполнения плавной размотки гибкой диэлектрической ленточной подложки 19 и исключения рывков, вызывающих нарушение ориентации при скоростном развертывании гибкой диэлектрической ленточной подложки 19. В зависимости от введенных в первый 29 и во второй 30 контроллеры программ режимов развертывания гибкой солнечной батареи, развертывание может осуществляться при различных сочетаниях использования ракетных и реверсивных шаговых двигателей. Использование первого 9 или второго 10 мультивекторных матричных ракетных двигателей может быть осуществлено как в качестве вытяжного, так и в качестве тормозного двигателя. Использование первого 16 или второго 17 реверсивных шаговых двигателей может быть осуществлено для выполнения функций натяжения полотна гибкой диэлектрической ленточной подложки 19 или для сбрасывания дозированной длины полотна гибкой диэлектрической ленточной подложки 19 в космос. Это дает слабину полотну для исключения разрыва гибкой диэлектрической ленточной подложки 19, которая впоследствии убирается при осуществлении оптимального натяжения. При скоростном развертывании гибкой диэлектрической ленточной подложки 19 первый 9 и второй 10 мультивекторные матричные ракетные двигатели разматывают полотно солнечной батареи, равномерно разлетаясь в разные стороны, при этом, с помощью первого 15 и второго 16 реверсивных шаговых двигателей имеется возможность подтягивания первого 1 кубического корпуса МКА ко второму 2 кубическому корпусу МКА или группе состыкованных МКА при выключенных первом 9 и втором 10 мультивекторных матричных ракетных двигателях. После развертывания на требуемую длину гибкой диэлектрической ленточной подложки 19 с тонкопленочными солнечными фотоэлементами 20 система переходит в режим ориентации и слежения за Солнцем. Поворот плоскости гибкой диэлектрической ленточной подложки 19 в направлении Солнца и одновременное оптимальное натяжение ее осуществляется с помощью первого 9 и второго 10 мультивекторных матричных ракетных двигателей, осуществляющих сближение или удаление первого 1 и второго 2 кубических корпусов относительно друг друга, перемещаясь параллельно оптическим осям первого 11 и второго 12 лазерных дальномеров и одновременно осуществляя угловые повороты синхронно первого 1 кубического корпуса и второго 2 кубического корпуса, согласно коду координат Солнца полученных от первого 27 и второго 28 солнечных датчиков. На гибкой диэлектрической ленточной подложке 19, кроме тонкопленочных солнечных фотоэлементов 20 и соединяющих их силовых шин 21, также по краям нанесены коллинеарная антенна 23 и проводной двунаправленный канал связи в виде информационной шины 24 для обмена информацией между первым 29 и вторым 30 контроллерами. Первый 31 и второй 32 дисковые токосъемники обеспечивают устойчивые электрические контакты со всеми элементами, расположенными на гибкой диэлектрической ленточной подложке 19 во время вращения первой 17 или второй 18 катушек в процессе разматывания и растягивания гибкой диэлектрической ленточной подложки 19, при ее развертывании и ориентации на Солнце. Электрический ток, выработанный тонкопленочными солнечными фотоэлементами с контактов первого 31 и второго 32 токосъемников, поступает на входы первого 33 и второго 34 стабилизаторов напряжения, которые выдают стабилизированные напряжения для питания первого 35 и второго 36 приемопередатчиков, для зарядки аккумуляторов первого 29 и второго 30 контроллеров и обеспечения электропитанием всех датчиков и двигателей. Первый 37 и второй 38 электромагниты с помощью электромагнитного поля управляют силой адгезии наноструктурированных элементов первой 39 и второй 40 стыковочных наноструктурированных контактных лент с управляемой адгезией, которые осуществляют захват и удержание МКА при построении многозвенной архитектуры из нескольких МКА и изменения ее конфигурации. На Фиг. 3, Фиг. 4, Фиг. 5 поясняются этапы развертывания гибкой солнечной батареи. Фиг. 3, первый этап - выполнение тестирования после выведения на заданную орбиту. На этом этапе первый 1 и второй 2 кубические корпусы с первым 9 и втором 10 мультивекторными матричными ракетными двигателями плотно прилегают друг к другу. В этом состоянии осуществляется тестирование показаний первого 11 и второго 12 лазерных дальномеров и первого 25, второго 26 датчиков штрих-кодов. Фиг. 4, второй этап - выполнение развертывания гибкой солнечной батареи. На этом этапе первый 9 и второй 10 мультивекторные матричные ракетные двигатели с помощью первой 7 и второй 8 выдвижных телескопических штанг отводятся от первого 1 и второго 2 кубических корпусов. После этого они включаются и разлетаются в противоположные стороны, ориентируясь строго по двум параллельным лазерным лучам с длиной волны λ1 и λ2 (для исключения закручивания подложки и повышения помехоустойчивости), увлекая за собой разматываемое полотно гибкой диэлектрической ленточной подложки 19. Фиг. 5, третий этап - выполнение развертывания гибкой солнечной батареи с одновременной ориентацией ее на Солнце. На этом этапе, кроме реверсивных двигательных ячеек первого 9 и второго 10 мультивекторных матричных ракетных двигателей, развернувших гибкую диэлектрическую ленточную подложку 19 на заданную длину для установки заданных характеристик коллинеарной антенны 23, включаются радиальные двигательные ячейки первого 9 и второго 10 мультивекторных матричных ракетных двигателей, которые осуществляют синхронные угловые развороты первого 1 и второго 2 кубических корпусов, согласно заданным координатам ориентации поверхности гибкой солнечной батареи на Солнце. Двунаправленными стрелками показано направления развертывания и свертывания гибкой солнечной батареи. Стрелками с округленными концами, в качестве примера, показаны мгновенные значения величин и направлений нескольких векторов тяги в определенный момент времени, при выполнении режимов вытягивания и торможения или стабилизации в разных стадиях процесса развертывания гибкой солнечной батареи, заданных ситуационной программой, предварительно введенной в первый 29 и второй 30 контроллеры, для развертывания и ориентации гибкой диэлектрической ленточной подложки 19 с размещенными тонкопленочными солнечными фотоэлементами 20 и коллинеарной антенной 23.
Предложенная конструкция бинарного малоразмерного космического аппарата с реконфигурируемой антенной, совмещенной с гибкой ленточной солнечной батареей, развертываемой мультивекторным матричным ракетным двигателем, позволила при использовании гибкой тонкопленочной ленточной солнечной батареи с функцией свертывания в рулон, получить максимальное отношение площади развертываемой солнечной батареи по отношению к сверхмалой площади поверхности корпуса МКА. Использование компактных быстродействующих маневровых мультивекторных цифровых матричных ракетных двигателей позволило осуществить скоростное свертывание и развертывание гибкой диэлектрической ленточной подложки с целью заданного изменения электрических характеристик коллинеарной антенны, площади гибкой солнечной батареи, спектрального портрета МКА, с одновременной ее ориентацией на заданный объект. Использование наноструктурированного стыковочного узла с управляемой адгезией, позволило осуществлять адгезионную стыковку за счет прилипания к объектам, как имеющим, так и не имеющим стыковочных узлов при выполнении реконфигурации, что ранее невозможно было осуществить при помощи конструкций известных малоразмерных космических аппаратов.
Источники информации
1. Патент RU 2651309 С1, 19.04.2018, B64G 1/22, B64G 1/10, B64G 1/1021, Космический аппарат дистанционного зондирования Земли микро класса.
2 Patent US 9758260 В2, Sep.12, 2017, B64G 1/22, B64G 1/10, LOW VOLUME MICRO SATELLITE WITH ELEXIBLE WINDED PANELS EXPANDABLE AFTER LAUNCH.
3. Патент на полезную модель RU 183937 U1, 09.10.2018, B64G 1/40, МУЛЬТИВЕКТОРНАЯ МАТРИЧНАЯ РАКЕТНАЯ ДВИГАТЕЛЬНАЯ СИСТЕМА С ЦИФРОВЫМ УПРАВЛЕНИЕМ ВЕЛИЧИНОЙ И НАПРАВЛЕНИЕМ ТЯГИ ДВИГАТЕЛЬНЫХ ЯЧЕЕК ДЛЯ МАЛОРАЗМЕРНЫХ КОСМИЧЕСКИХ АППАРАТОВ / ЛИНЬКОВ В.А., Гусев
4. Патент RU 2654782 С1, 22.05.2018, F02K 9/94, F02K 9/95, B64G 1/40, В81В 7/04, РЕВЕРСИВНАЯ МАТРИЧНАЯ ракетная двигательная система с ИНДИВИДУАЛЬНЫМ ЦИФРОВЫМ управлением величиной тяги каждой РЕВЕРСИВНОЙ ДВИГАТЕЛЬНОЙ ЯЧЕЙКИ ДЛЯ МАЛОРАЗМЕРНЫХ КОСМИЧЕСКИХ АППАРАТОВ / Линьков В.А., Линьков Ю.В., Линьков П.В., Таганов А. И., Гусев С.И.
5 Patent US 7914912 В2, Mar. 12, 2011, В32 В 15/00, ACTIVELY SWITCHABLE NANO-STRUCTURED ADHESIVE.
Бинарный малоразмерный космический аппарат с реконфигурируемой антенной, совмещенной с гибкой развертываемой ленточной солнечной батареей, содержащий корпус, гибкую подложку с нанесенными на нее тонкопленочными солнечными фотоэлементами, механизм развертывания подложки, антенну, приемопередатчик, солнечный датчик, узел стыковки, отличающийся тем, что содержит два линейных и два реверсивных шаговых двигателя, две выдвижные телескопические штанги, два лазерных дальномера, две ПЗС-матрицы, гибкую диэлектрическую ленточную подложку, две катушки для ее намотки, штрихкодовую позиционную ленту и два датчика штрихкода, два дисковых токосъемника и два контроллера, при этом корпус состоит из первого и второго разделяемых кубических корпусов, соединенных с первой и второй прямоугольными панелями, между которыми закреплена указанная диэлектрическая ленточная подложка с тонкопленочными солнечными фотоэлементами, причем на свободные зоны ленточной подложки, расположенные параллельно ее краям, нанесены указанная штрихкодовая позиционная лента, а также коллинеарная антенна, силовые и информационные шины, соединенные электрически с первым и вторым дисковыми токосъемниками, при этом механизм развертывания подложки выполнен в виде первого и второго мультивекторных матричных ракетных двигателей, механически соединенных через первую и вторую выдвижные телескопические штанги с первым и вторым линейными шаговыми двигателями, а информационные входы указанных матричных ракетных и линейных шаговых двигателей соединены с первыми и вторыми информационными выходами первого и второго контроллеров, третьи информационные выходы которых соединены с входами первого и второго реверсивных шаговых двигателей, механически соединенных с осями первой и второй катушек, электрически соединенных через первый и второй дисковые токосъемники с первым и вторым стабилизаторами напряжения, первым и вторым приемопередатчиками, первым и вторым контроллерами, двунаправленные шины которых соединены с первым и вторым лазерными дальномерами, работающими на различных выделенных длинах волн электромагнитного излучения, оптические оси которых направлены встречно-параллельно на центры второй и первой ПЗС-матриц, реагирующих на указанные выделенные длины волн, причем информационные выходы ПЗС-матриц соединены с первыми информационными входами первого и второго контроллеров, вторые и третьи информационные входы которых соединены с информационными выходами первого и второго датчиков штрихкода и выходами первого и второго солнечных датчиков, закрепленных на ребрах первой и второй прямоугольных панелей, на противоположных плоских поверхностях которых размещены первый и второй лазерные дальномеры, первая и вторая ПЗС-матрицы, установленные напротив друг друга и перпендикулярно граням первого и второго кубических корпусов, а шины электропитания первого и второго контроллеров соединены с выходами первого и второго стабилизаторов напряжения и шинами первого и второго приемопередатчиков, при этом узел стыковки выполнен в виде двух стыковочных наноструктурированных контактных лент с управляемой адгезией, закрепленных на свободных гранях первого и второго кубических корпусов и активируемых при помощи первого и второго электромагнитов, электрически соединенных с четвертыми выходами первого и второго контроллеров.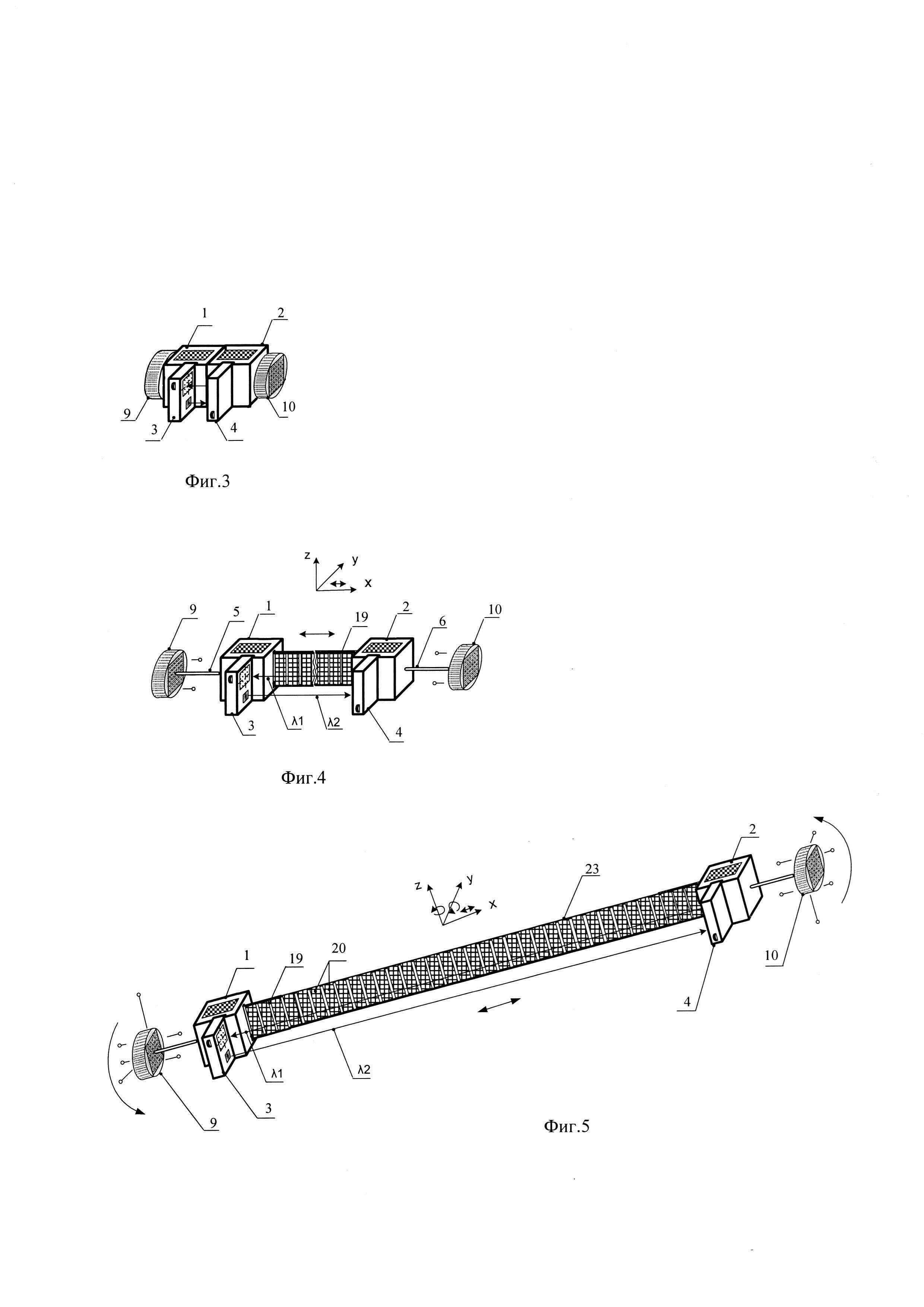
Вычислитель для режектирования помех
Зонд атомно-силового микроскопа с программируемым спектральным портретом излучающего элемента, легированного квантовыми точками структуры ядро-оболочка
Вычислитель доплеровской скорости движения объекта
Фазометр когерентных неэквидистантных импульсов
Градиентное защитное покрытие
Способ получения покрытий на основе нанопористого диоксида титана
Способ обнаружения механического воздействия для идентификации пользователя и устройство для его осуществления
Вычислитель для подавления помех
Вычислитель для режекции помех
Фильтр режектирования помех
Матричная ракетная двигательная система с индивидуальным цифровым управлением величиной тяги каждой двигательной ячейки для малоразмерных космических аппаратов
Сканирующий зонд атомно-силового микроскопа с отделяемым телеуправляемым нанокомпозитным излучающим элементом, легированным квантовыми точками и магнитными наночастицами структуры ядро-оболочка
Сканирующий зонд атомно-силового микроскопа с разделяемым телеуправляемым нанокомпозитным излучающим элементом, легированным квантовыми точками и магнитными наночастицами структуры ядро-оболочка
Мультивекторная матричная ракетная двигательная система с цифровым управлением величиной и направлением тяги двигательных ячеек для малоразмерных космических аппаратов
Мультивекторная матричная ракетная двигательная система с цифровым управлением величиной и направлением тяги двигательных ячеек для малоразмерных космических аппаратов
Бинарный космический аппарат с реконфигурируемой антенной, совмещенной с гибкой ленточной солнечной батареей, развертываемой мультивекторными матричными ракетными двигателями
Сканирующий зонд атомно-силового микроскопа с отделяемым телеуправляемым нанокомпозитным излучающим элементом, легированным апконвертирующими и магнитными наночастицами структуры ядро-оболочка
Сканирующий зонд атомно-силового микроскопа с разделяемым телеуправляемым нанокомпозитным излучающим элементом на основе апконвертирующих и магнитных наночастиц структуры ядро-оболочка
Устройство и способ формирования пучков многозарядных ионов
Сканирующий зонд атомно-силового микроскопа с отделяемым телеуправляемым нанокомпозитным излучающим элементом на основе апконвертирующих и магнитных наночастиц структуры ядро-оболочка

